
Optimal Scheduling of Reconfigurable Microgrids in Both Grid-Connected and Isolated Modes Considering the Uncertainty of DERs



Abstract
:1. Introduction
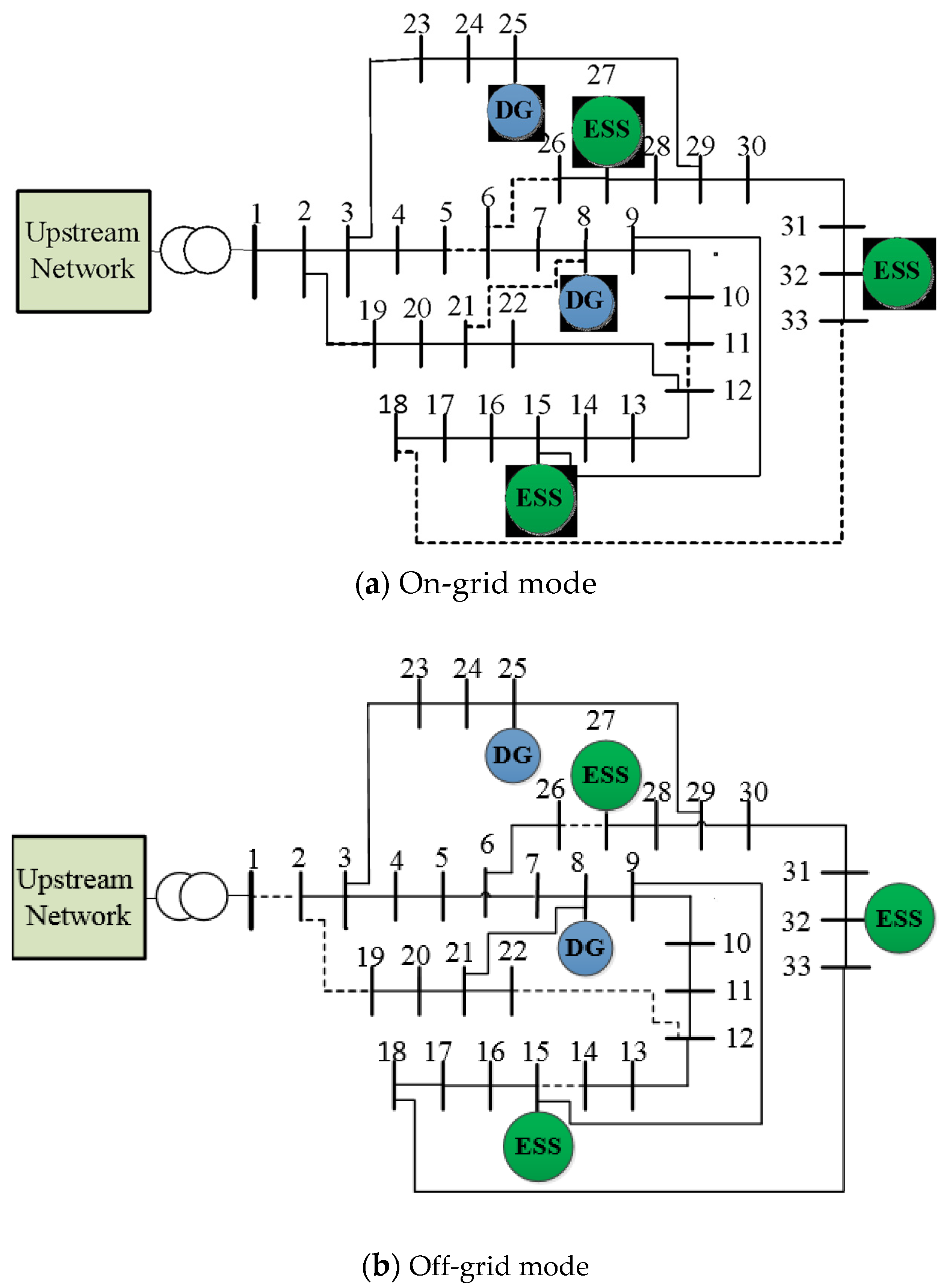
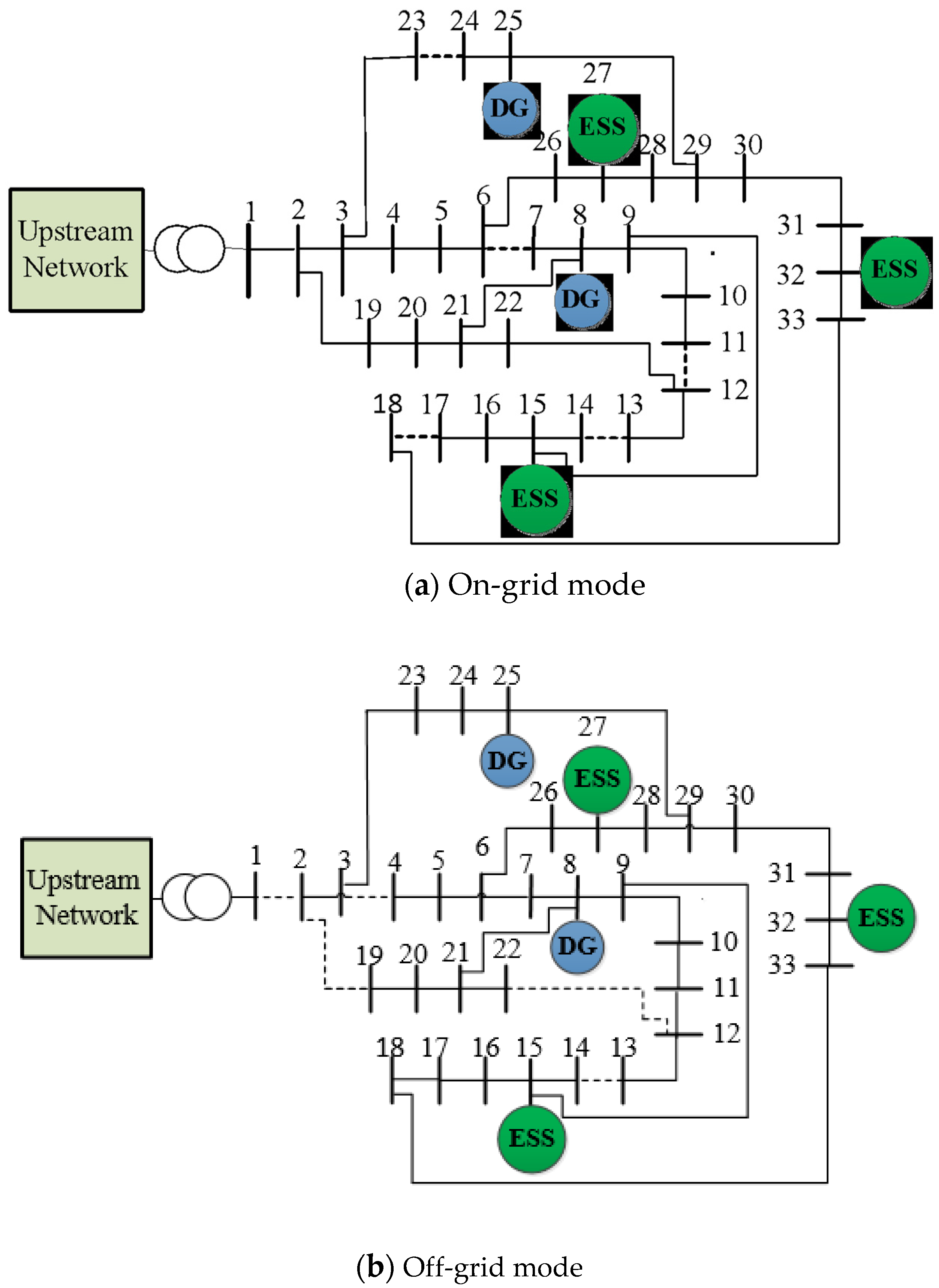
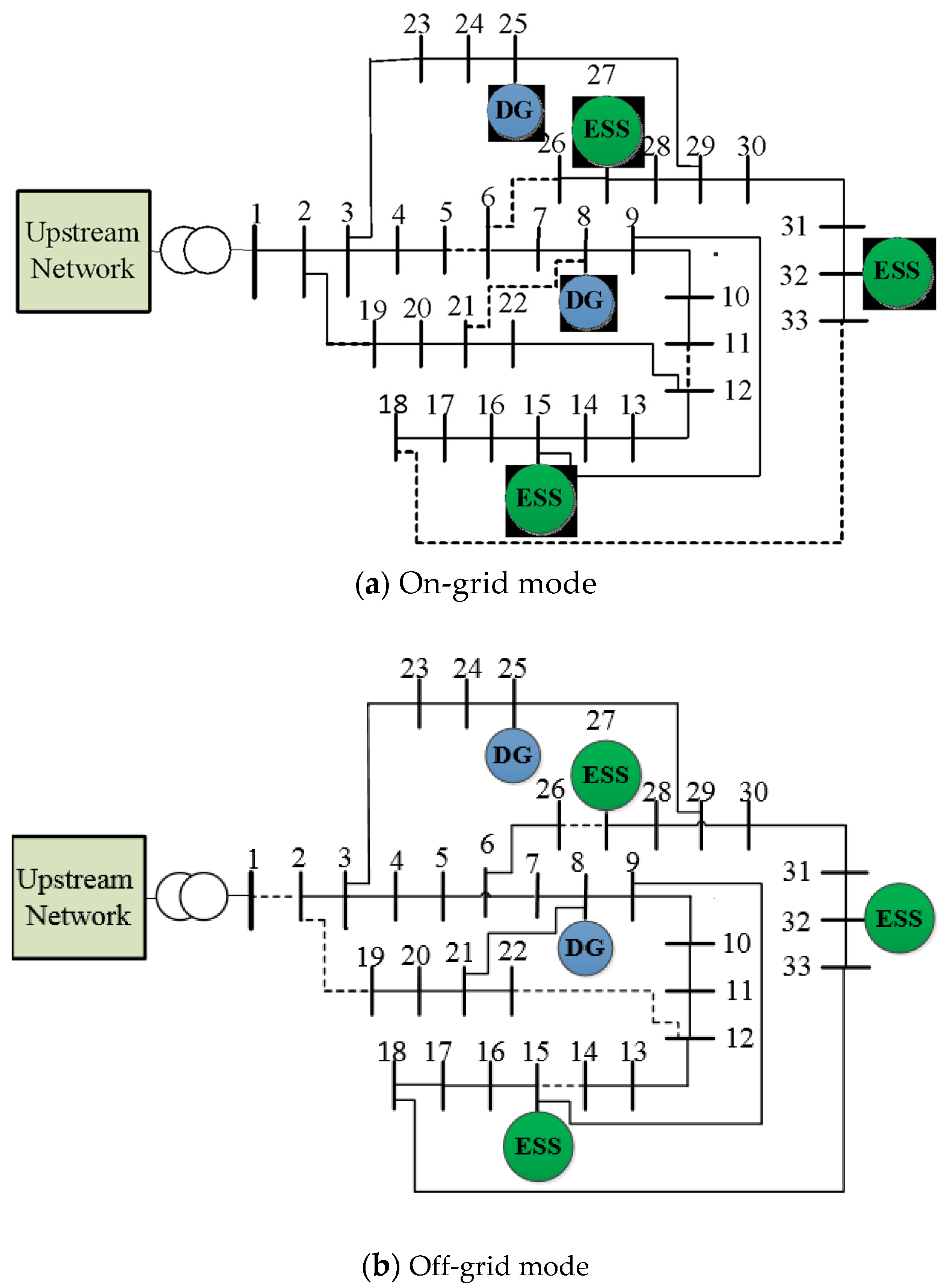
- Proposing a comprehensive mathematical model for reconfiguration of MGs in both grid-connected and islanded modes.
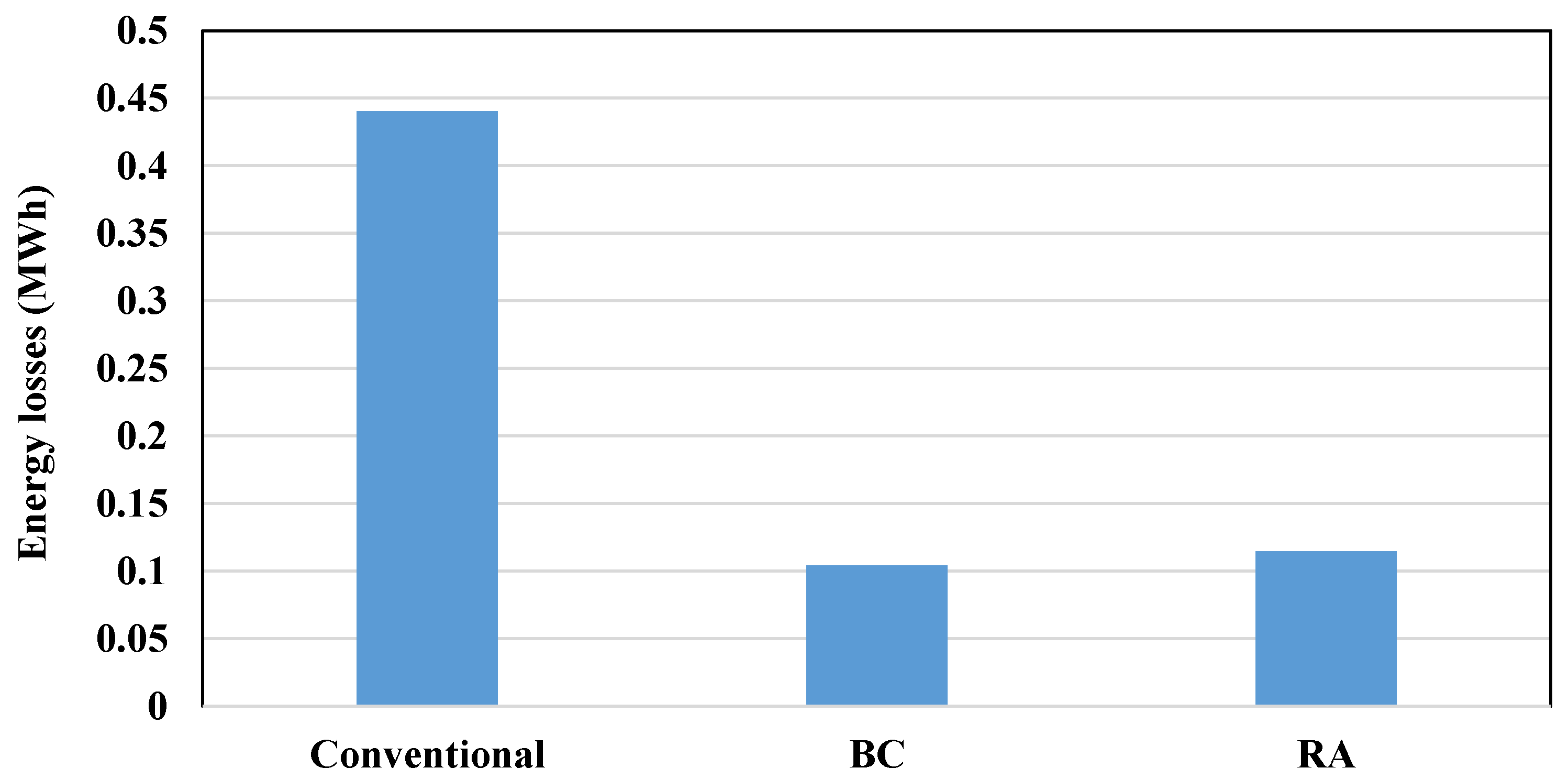
- Analyzing the active power losses and energy not supplied simultaneously in MG scheduling, in both grid-connected and isolated operation modes.
2. Uncertainty Modeling
Principles of Information Gap Decision Theory
3. Problem Formulation
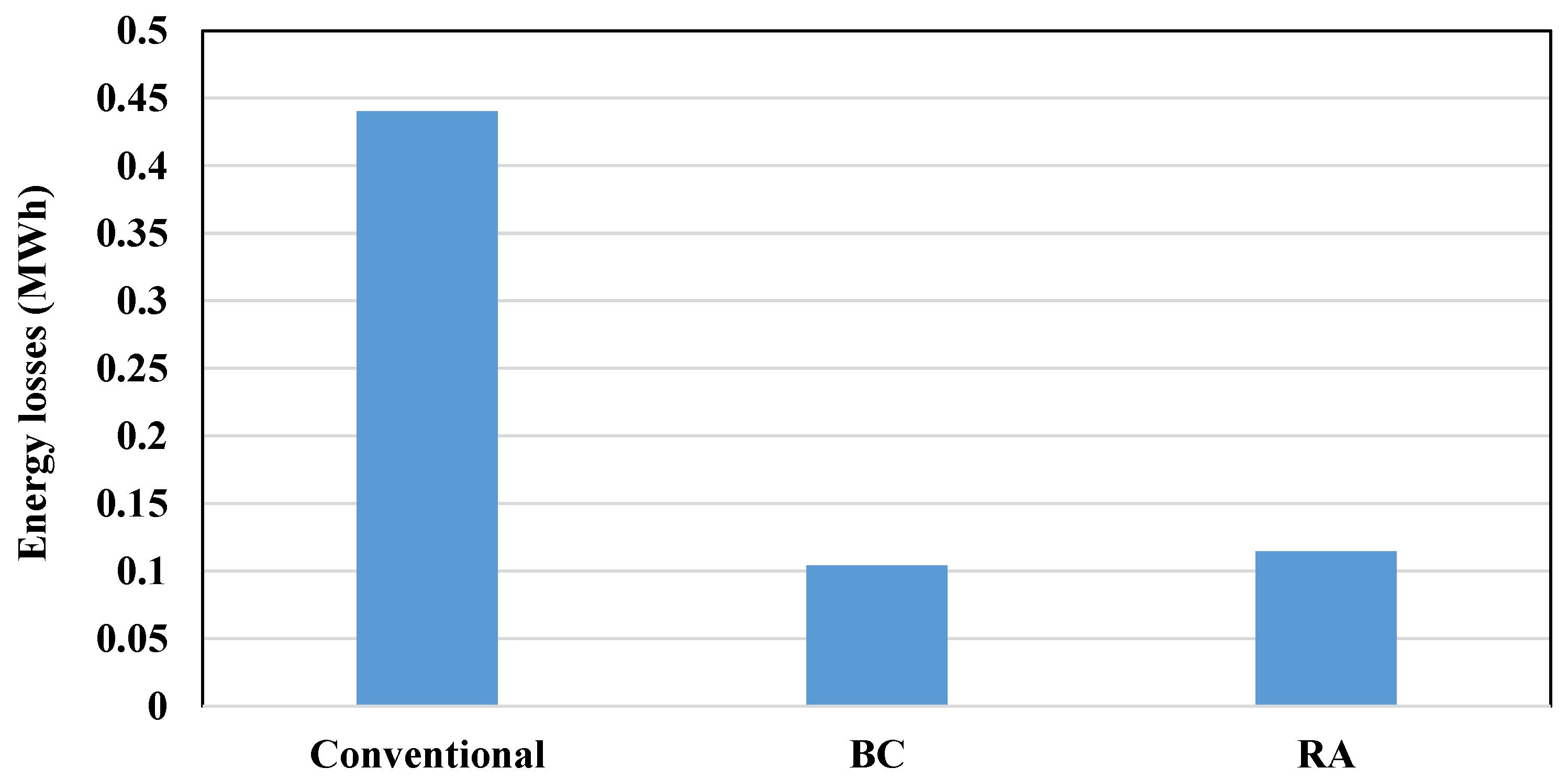
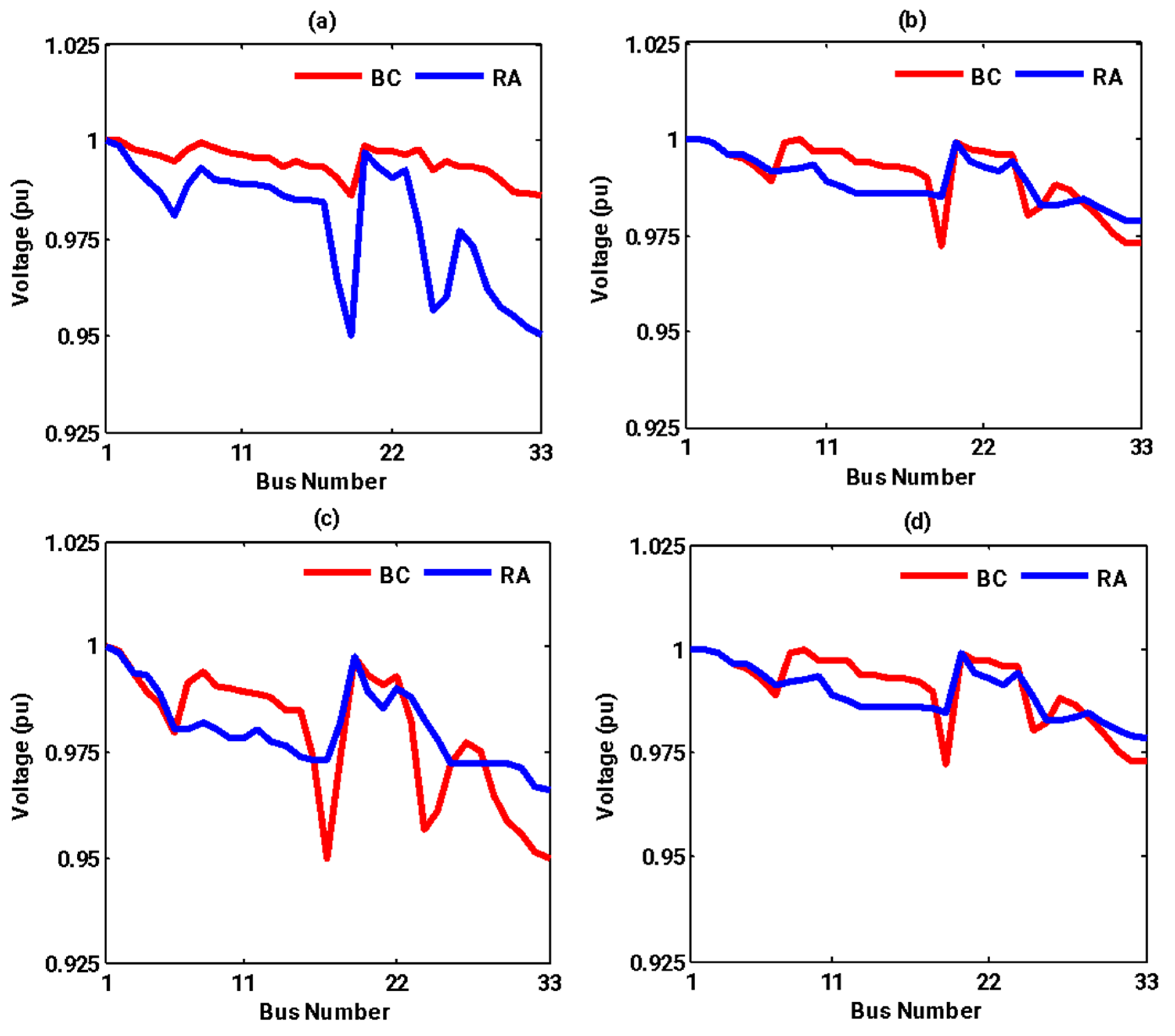
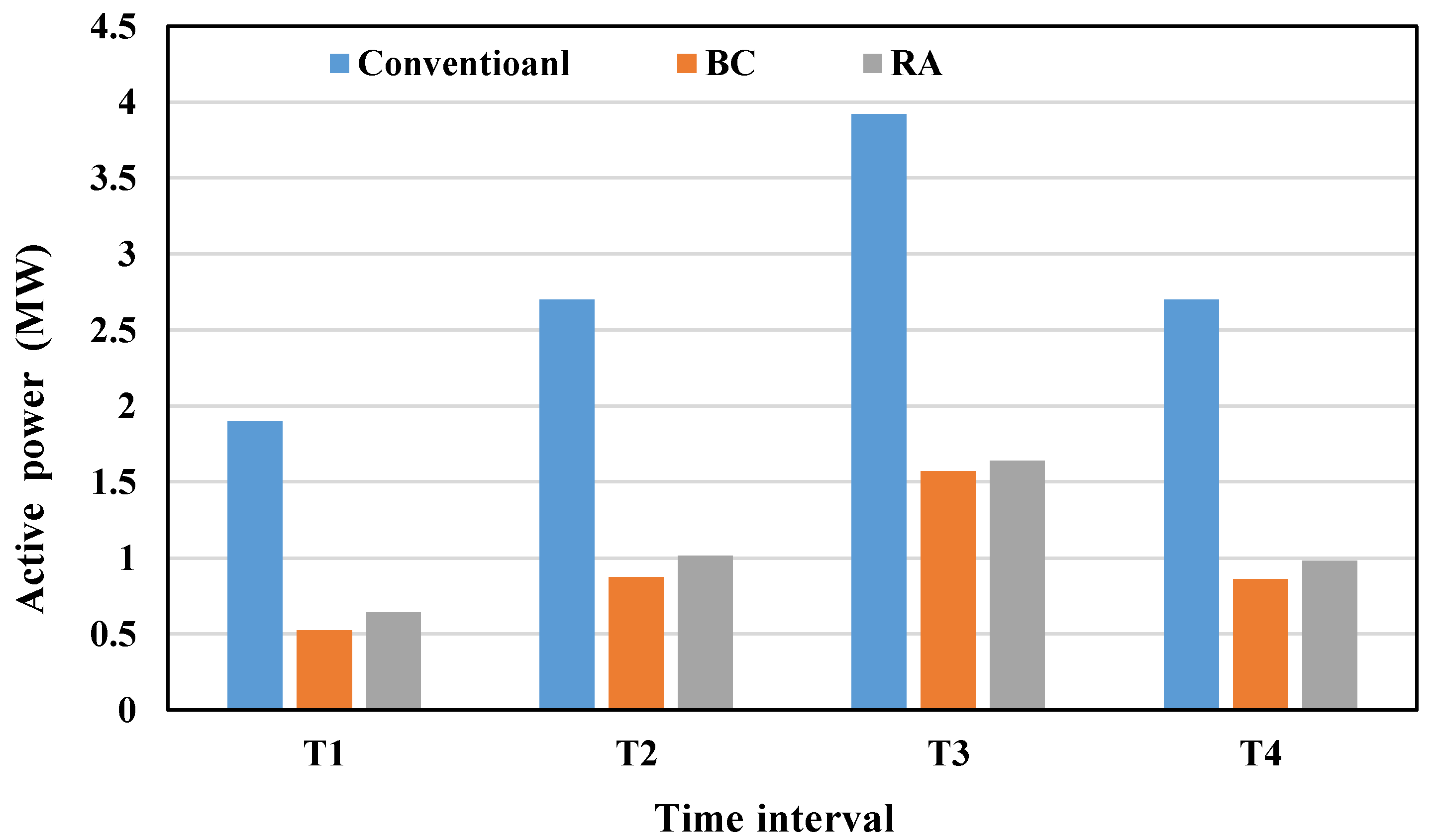
- ScenarioS1: In this scenario, the considered grid is connected to the upstream grid. Since there is no load supply problem, in this case, the objective function of this scenario is power loss minimization. Minimizing active power losses is one of the essential goals expressed in Equation (16).
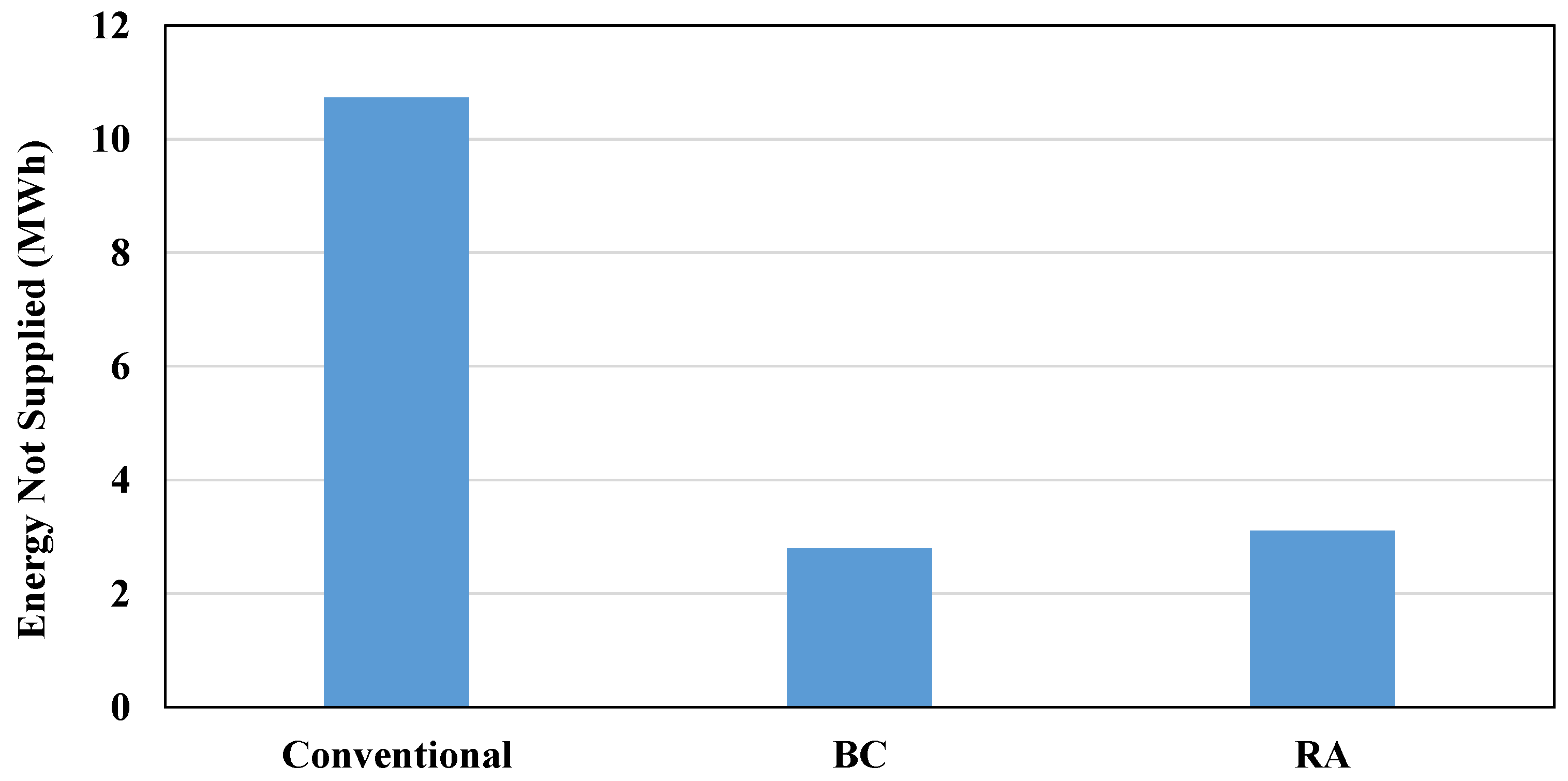
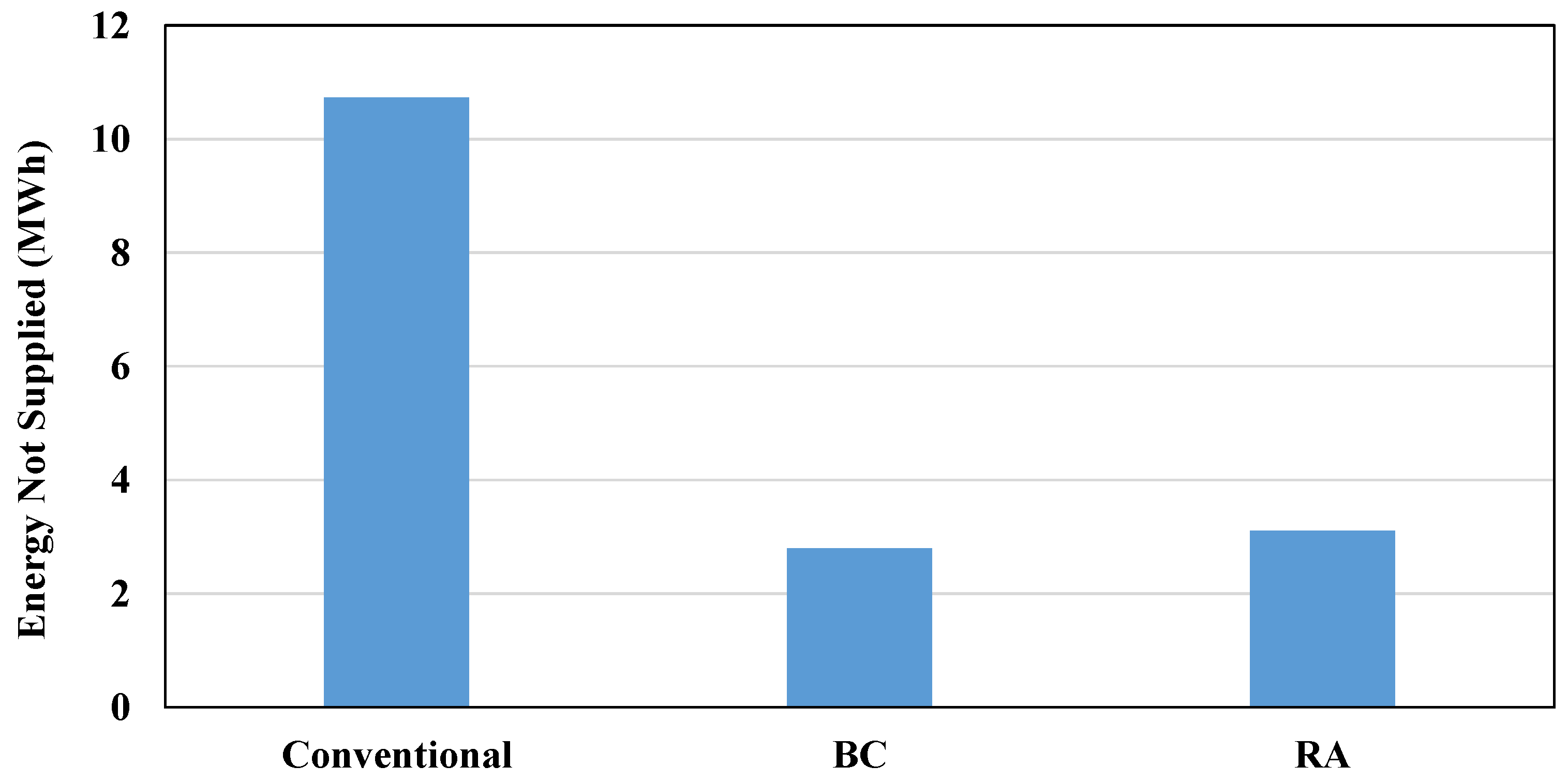
- ScenarioS2: The MG is disconnected from the upstream grid in this scenario. Therefore, to supply system load as much as possible, in Scenario S2, the goal is to minimize the energy not supplied (ENS) of the grid.
3.1. General Objective Function
3.2. Power Flow Constraints
3.3. DG Capacity Constraints
3.4. ESS Capacity Constraints
3.5. Radiality Constraints
- No loops are formed in the grid.
- All loads should be supplied.
3.6. Uncertainty Handling
3.6.1. Base Case Model
3.6.2. Risk-Averse Strategy
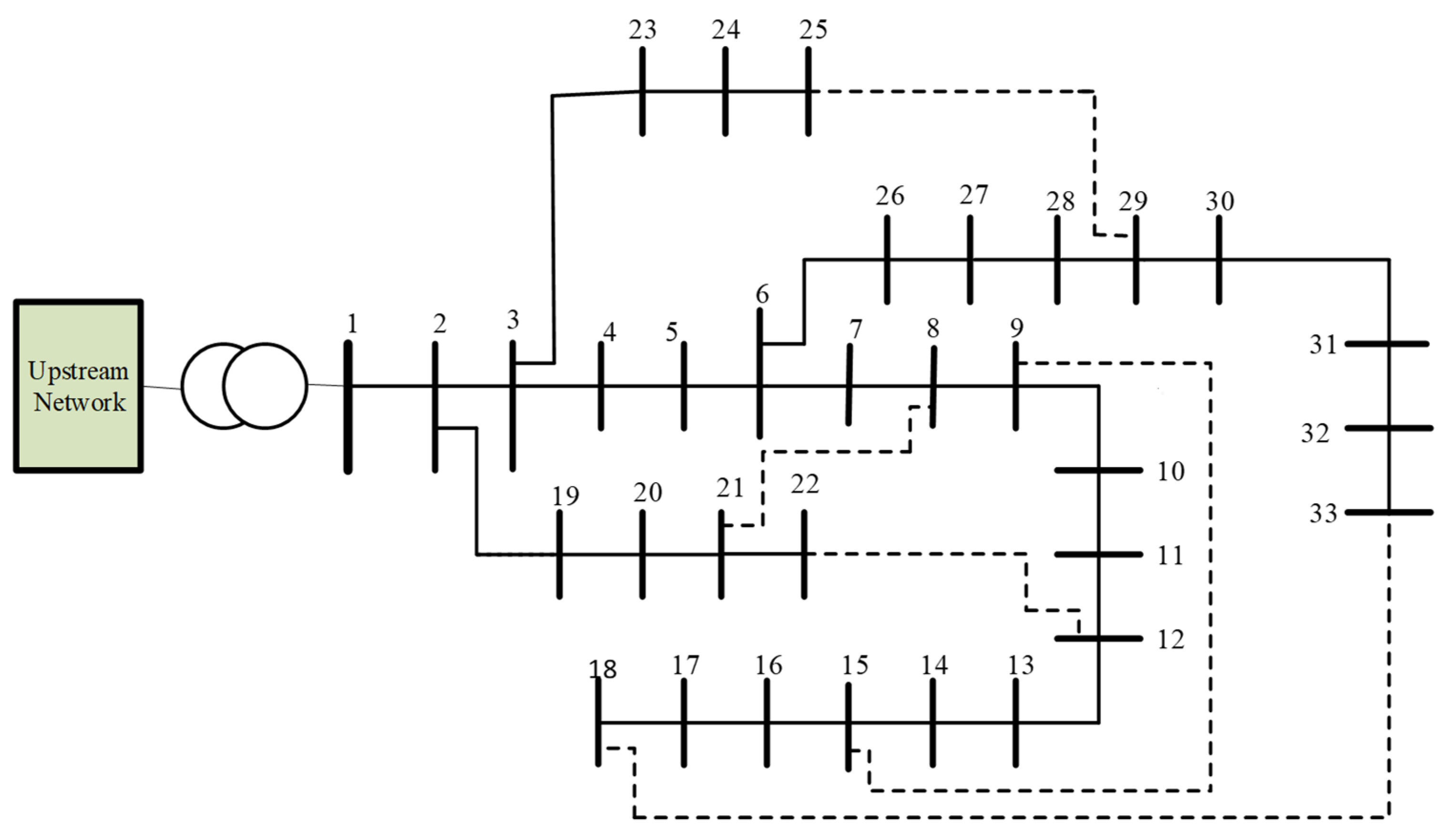
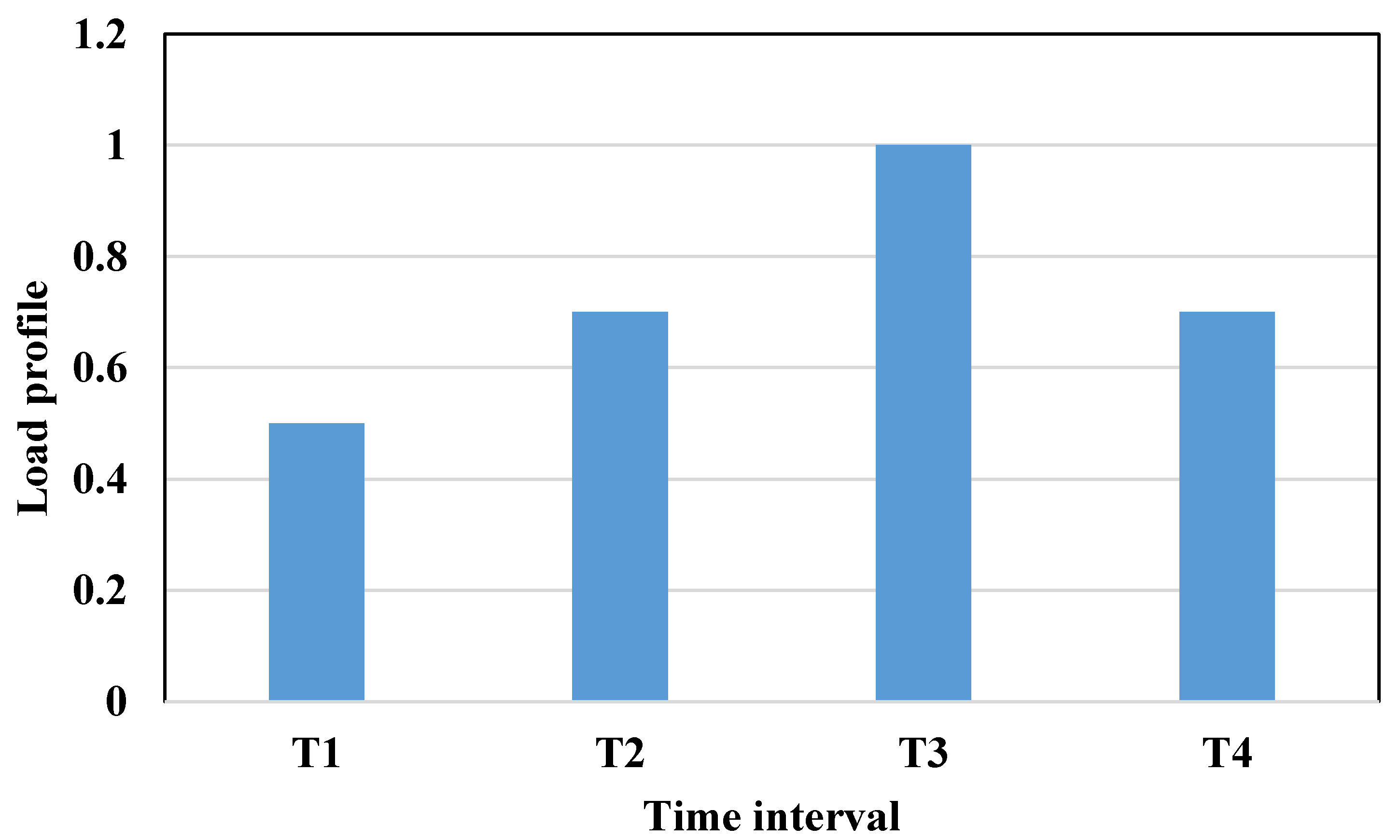
4. Case Studies and Data
4.1. Data and Assumptions
4.2. Studied Cases
5. Results and Discussion
6. Conclusions
- Considering the possibilistic nature of the loads and comparing the results obtained from the IGDT technique with other methods of modeling uncertainty, such as the possibilistic programming method.
- Examining the use of other flexibilities such as demand response as an option to reduce the unsupplied energy.
- Considering the voltage dependent load model for all demand types, as in off-grid operation mode the behavior of loads is an important factor.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Sets | |
| Set of all nodes | |
| Set of buses equipped with ESS | |
| Set of operation period | |
| Set of scenarios (on-grid, off-grid) | |
| Set of branches | |
| Set of DG installed buses | |
| Indices | |
| i,j | Index of System buses |
| s | Index for Scenario (on-grid and off-grid) |
| T | Index of Operation period |
| Variables and Parameter | |
| Active power of load disconnected from the grid in MG’s isolated mode | |
| Reactive power of load disconnected from the grid in MG’s isolated mode | |
| Energy not supplied | |
| Active power losses | |
| Active power generated by the post | |
| Reactive power generated by the post | |
| Active load of bus | |
| Reactive load of bus | |
| Generation power of the DG installed in the bus | |
| Reactive power generated by the buses connected to the DG | |
| Capacity of DGs | |
| Maximum limit of reactive power exchange by the DG unit located in i-th bus | |
| Maximum predicted value of active power in DG connected bus | |
| Degree of tolerance of increasing the objective function relative to the base value | |
| Battery charge capacity | |
| Battery discharge capacity | |
| Maximum limit of battery capacity | |
| Energy level available in the battery | |
| Minimum limit of battery capacity | |
| Charging efficiency of ESS | |
| Discharging efficiency of ESS | |
| Binary variable to model charging state of ESS | |
| Binary variable to model discharging state of ESS | |
| Active power flow of ij-th branch | |
| Reactive power flow of ij-th branch | |
| Voltage amplitude of i-th bus | |
| Minimum voltage amplitude | |
| Maximum voltage amplitude | |
| Conductance of ij-th branch | |
| Susceptance of the ij-th branch | |
| The binary variable representing the status of the line between buses i and j | |
References
- Yin, C.; Wu, H.; Locment, F.; Sechilariu, M. Energy management of DC microgrid based on photovoltaic combined with diesel generator and supercapacitor. Energy Convers. Manag. 2017, 132, 14–27. [Google Scholar] [CrossRef]
- Dulău, L.I.; Bică, D. Optimization of generation cost in a microgrid. Procedia Manuf. 2018, 22, 703–708. [Google Scholar] [CrossRef]
- Palizban, O.; Kauhaniemi, K.; Guerrero, J. Microgrids in active network management—Part I: Hierarchical control, energy storage, virtual power plants, and market participation. Renew. Sustain. Energy Rev. 2014, 36, 428–439. [Google Scholar] [CrossRef] [Green Version]
- Nikkhah, S.; Rabiee, A. A Joint Energy Storage Systems and Wind Farms Long-Term Planning Model Considering Voltage Stability. In Operation, Planning, and Analysis of Energy Storage Systems in Smart Energy Hubs; Springer: Cham, Switzerland, 2018; pp. 337–363. [Google Scholar] [CrossRef]
- Li, Y.; Feng, B.; Li, G.; Qi, J.; Zhao, D.; Mu, Y. Optimal distributed generation planning in active distribution networks considering integration of energy storage. Appl. Energy 2018, 210, 1073–1081. [Google Scholar] [CrossRef] [Green Version]
- Del Granado, P.C.; Wallace, S.W.; Pang, Z. The value of electricity storage in domestic homes: A smart grid perspective. Energy Syst. 2014, 5, 211–232. [Google Scholar] [CrossRef]
- Zhang, K.; Li, J.; He, Z.; Yan, W. Microgrid energy dispatching for industrial zones with renewable generations and electric vehicles via stochastic optimization and learning. Phys. A Stat. Mech. Appl. 2018, 501, 356–369. [Google Scholar] [CrossRef]
- Del Granado, P.C.; Pang, Z.; Wallace, S.W. Synergy of smart grids and hybrid distributed generation on the value of energy storage. Appl. Energy 2016, 170, 476–488. [Google Scholar] [CrossRef] [Green Version]
- Iris, Ç.; Lam, J.S.L. A review of energy efficiency in ports: Operational strategies, technologies and energy management systems. Renew. Sustain. Energy Rev. 2019, 112, 170–182. [Google Scholar] [CrossRef]
- Rahmani-Andebili, M. Simultaneous placement of DG and capacitor in distribution network. Electr. Power Syst. Res. 2016, 131, 1–10. [Google Scholar] [CrossRef]
- Iris, Ç.; Lam, J.S.L. Optimal energy management and operations planning in seaports with smart grid while harnessing renewable energy under uncertainty. Omega 2021, 103, 102445. [Google Scholar] [CrossRef]
- Chen, C.; Duan, S. Optimal allocation of distributed generation and energy storage system in microgrids. IET Renew. Power Gener. 2014, 8, 581–589. [Google Scholar] [CrossRef] [Green Version]
- Nair, A.S.; Hossen, T.; Campion, M.; Selvaraj, D.F.; Goveas, N.; Kaabouch, N.; Ranganathan, P. Multi-Agent Systems for Resource Allocation and Scheduling in a Smart Grid. Technol. Econ. Smart Grids Sustain. Energy 2018, 3, 15. [Google Scholar] [CrossRef] [Green Version]
- Phommixay, S.; Doumbia, M.L.; St-Pierre, D.L. Review on the cost optimization of microgrids via particle swarm optimization. Int. J. Energy Environ. Eng. 2019, 11, 73–89. [Google Scholar] [CrossRef] [Green Version]
- Bouchekara, H.R.E.-H.; Javaid, M.S.; Shaaban, Y.A.; Shahriar, M.S.; Ramli, M.A.M.; Latreche, Y. Decomposition based multiobjective evolutionary algorithm for PV/Wind/Diesel Hybrid Microgrid System design considering load uncertainty. Energy Rep. 2020, 7, 52–69. [Google Scholar] [CrossRef]
- Zakir, M.; Sher, H.A.; Arshad, A.; Lehtonen, M. A fault detection, localization, and categorization method for PV fed DC-microgrid with power-sharing management among the nano-grids. Int. J. Electr. Power Energy Syst. 2021, 137, 107858. [Google Scholar] [CrossRef]
- Zakir, M.; Arshad, A.; Sher, H.A.; Al-Durra, A. Design and implementation of a fault detection method for a PV-fed DC-microgrid with power control mechanism. IET Electr. Power Appl. 2022. [Google Scholar] [CrossRef]
- Gholami, A.; Shekari, T.; Aminifar, F.; Shahidehpour, M. Microgrid Scheduling With Uncertainty: The Quest for Resilience. IEEE Trans. Smart Grid 2016, 7, 2849–2858. [Google Scholar] [CrossRef]
- Kumar, K.P.; Saravanan, B. Recent techniques to model uncertainties in power generation from renewable energy sources and loads in microgrids—A review. Renew. Sustain. Energy Rev. 2017, 71, 348–358. [Google Scholar] [CrossRef]
- Ben-Haim, Y. Info-Gap Decision Theory: Decisions under Severe Uncertainty; Academic Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Majidi, M.; Mohammadi-Ivatloo, B.; Soroudi, A. Application of information gap decision theory in practical energy problems: A comprehensive review. Appl. Energy 2019, 249, 157–165. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Wan, C.; Xu, Z.; Wang, J. Risk-Based Day-Ahead Scheduling of Electric Vehicle Aggregator Using Information Gap Decision Theory. IEEE Trans. Smart Grid 2015, 8, 1609–1618. [Google Scholar] [CrossRef]
- Sarhadi, S.; Amraee, T. Robust dynamic network expansion planning considering load uncertainty. Int. J. Electr. Power Energy Syst. 2015, 71, 140–150. [Google Scholar] [CrossRef]
- Kazemi, M.; Mohammadi-Ivatloo, B.; Ehsan, M. Risk-based bidding of large electric utilities using Information Gap Decision Theory considering demand response. Electr. Power Syst. Res. 2014, 114, 86–92. [Google Scholar] [CrossRef]
- Chen, K.; Wu, W.; Zhang, B.; Sun, H. Robust Restoration Decision-Making Model for Distribution Networks Based on Information Gap Decision Theory. IEEE Trans. Smart Grid 2014, 6, 587–597. [Google Scholar] [CrossRef]
- Murphy, C.; Soroudi, A.; Keane, A. Information Gap Decision Theory-Based Congestion and Voltage Management in the Presence of Uncertain Wind Power. IEEE Trans. Sustain. Energy 2015, 7, 841–849. [Google Scholar] [CrossRef] [Green Version]
- Kavousi-Fard, A.; Zare, A.; Khodaei, A. Effective Dynamic Scheduling of Reconfigurable Microgrids. IEEE Trans. Power Syst. 2018, 33, 5519–5530. [Google Scholar] [CrossRef]
- Acosta, J.A.; Cornick, K.J. Computer Models for Complex Plant & System Based on Terminal Measurements. IEEE Power Eng. Rev. 1989, 9, 101. [Google Scholar]
- Baran, M.E.; Wu, F.F. Network Reconfiguration in Distribution Systems for Loss Reduction and Load Balancing. IEEE Power Eng. Rev. 1989, 9, 101–102. [Google Scholar] [CrossRef]
- Zin, M.; Ferdavani, A.K.; Bin Khairuddin, A.; Naeini, M.M. Two Circular-Updating Hybrid Heuristic Methods for Minimum-Loss Reconfiguration of Electrical Distribution Network. IEEE Trans. Power Syst. 2012, 28, 1318–1323. [Google Scholar] [CrossRef]
- Jabr, R.A.; Singh, R.; Pal, B.C. Minimum Loss Network Reconfiguration Using Mixed-Integer Convex Programming. IEEE Trans. Power Syst. 2012, 27, 1106–1115. [Google Scholar] [CrossRef]
- Rao, R.S.; Narasimham, S.V.L.; Raju, M.R.; Rao, A.S. Optimal Network Reconfiguration of Large-Scale Distribution System Using Harmony Search Algorithm. IEEE Trans. Power Syst. 2010, 26, 1080–1088. [Google Scholar] [CrossRef]
- Srinivasa Rao, R.; Ravindra, K.; Satish, K.; Narasimham, S.V.L. Power Loss Minimization in Distribution System Using Network Reconfiguration in the Presence of Distributed Generation. IEEE Trans. Power Syst. 2013, 28, 317–325. [Google Scholar] [CrossRef]
- Ding, T.; Lin, Y.; Bie, Z.; Chen, C. A resilient microgrid formation strategy for load restoration considering master-slave distributed generators and topology reconfiguration. Appl. Energy 2017, 199, 205–216. [Google Scholar] [CrossRef]
- Thakar, S.; Vijay, A.S.; Doolla, S. System reconfiguration in microgrids. Sustain. Energy Grids Netw. 2019, 17, 100191. [Google Scholar] [CrossRef]
- Park, J.-Y.; Kim, Y.-J.; Lu, X. New Analytical Model of Microgrid Frequency and Voltage Variations Due to Network Reconfiguration. IEEE Trans. Smart Grid 2020, 12, 905–908. [Google Scholar] [CrossRef]
- Soroudi, A.; Amraee, T. Decision making under uncertainty in energy systems: State of the art. Renew. Sustain. Energy Rev. 2013, 28, 376–384. [Google Scholar] [CrossRef] [Green Version]
- Rabiee, A.; Nikkhah, S.; Soroudi, A.; Hooshmand, E. Information gap decision theory for voltage stability constrained OPF considering the uncertainty of multiple wind farms. IET Renew. Power Gener. 2017, 11, 585–592. [Google Scholar] [CrossRef]
- Nikkhah, S.; Nasr, M.-A.; Rabiee, A. A Stochastic Voltage Stability Constrained EMS for Isolated Microgrids in the Presence of PEVs Using a Coordinated UC-OPF Framework. IEEE Trans. Ind. Electron. 2020, 68, 4046–4055. [Google Scholar] [CrossRef]
- Lavorato, M.; Franco, J.F.; Rider, M.J.; Romero, R. Imposing radiality constraints in distribution system optimi-zation problems. IEEE Trans. Power Syst. 2011, 27, 172–180. [Google Scholar] [CrossRef]
- Soroudi, A. Power System Optimization Modeling in GAMS; Springer: Cham, Switzerland, 2017; pp. 1–295. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Reconfiguration | DER Placement | Objective Functions | Uncertainty Modeling Approach | MG State | |||
|---|---|---|---|---|---|---|---|---|
| DG | ESS | Power Loss | Reliability | On-Grid | Off-Grid | |||
| [1] | √ | √ | ||||||
| [2] | √ | √ | ||||||
| [13] | √ | √ | ||||||
| [14] | √ | √ | √ | |||||
| [15] | √ | √ | √ | |||||
| [18] | √ | √ | √ | |||||
| [19] | √ | √ | ||||||
| [27] | √ | √ | √ | √ | √ | |||
| [36] | √ | √ | √ | |||||
| This study | √ | √ | √ | √ | √ | √ | √ | √ |
| Parameter | |||||
|---|---|---|---|---|---|
| Value | 0.50 | 0.00 | 0.95 | 0.95 | 0.10 |
| Energy Injection (MWh) | ||
|---|---|---|
| Case Study | BC | RA |
| On-grid | 7.00 | 6.61 |
| Off-grid | 8.00 | 7.68 |
| Case Study | BC | RA |
|---|---|---|
| On-grid | 7% | 95% |
| Off-grid | 36% | 0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rezaeeian, S.; Bayat, N.; Rabiee, A.; Nikkhah, S.; Soroudi, A. Optimal Scheduling of Reconfigurable Microgrids in Both Grid-Connected and Isolated Modes Considering the Uncertainty of DERs. Energies 2022, 15, 5369. https://doi.org/10.3390/en15155369
Rezaeeian S, Bayat N, Rabiee A, Nikkhah S, Soroudi A. Optimal Scheduling of Reconfigurable Microgrids in Both Grid-Connected and Isolated Modes Considering the Uncertainty of DERs. Energies. 2022; 15(15):5369. https://doi.org/10.3390/en15155369
Chicago/Turabian StyleRezaeeian, Sepideh, Narges Bayat, Abbas Rabiee, Saman Nikkhah, and Alireza Soroudi. 2022. "Optimal Scheduling of Reconfigurable Microgrids in Both Grid-Connected and Isolated Modes Considering the Uncertainty of DERs" Energies 15, no. 15: 5369. https://doi.org/10.3390/en15155369