
Determining the Seasonal Variability of the Territorial Sea Baseline in Poland (2018–2020) Using Integrated USV/GNSS/SBES Measurements

 ,
,  ,
,  ,
,  , , and
, , and
Abstract
1. Introduction
2. Materials and Methods
2.1. Measurement Locations
2.2. Measurement Equipment
2.3. TSB Measurements
- Calibration (taring) of the vertical echo sounder;
- Measurement of the vertical distribution of the speed of sound in water;
- Measurement of the draft of the echo sounder transducer.
- Inclinometer calibration;
- Magnetometer calibration.
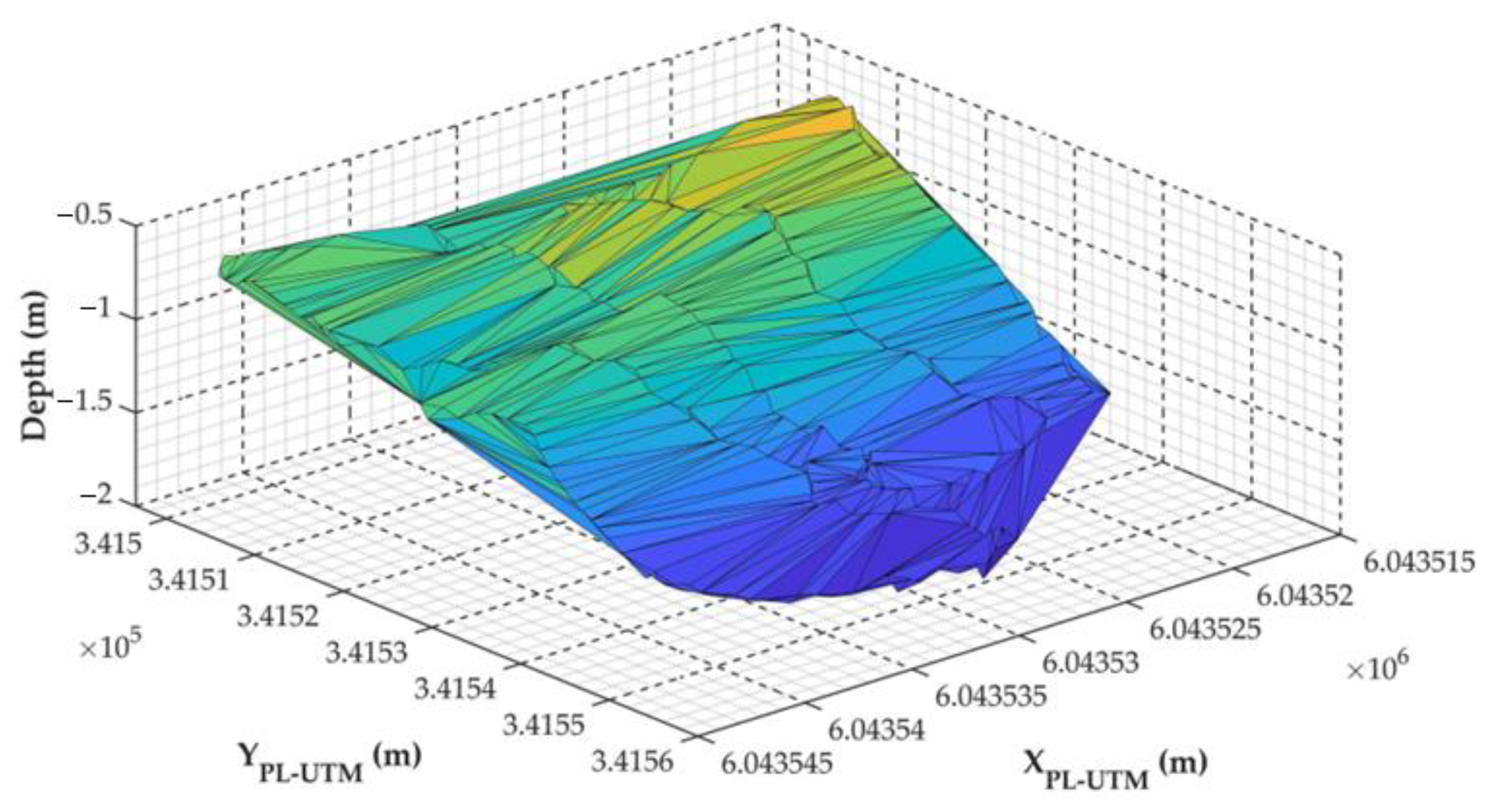
2.4. Measurement Data Elaboration
- HNSW—the lowest water level in the PL-KRON86-NH system (m).
2.5. TSB Variability Analysis
- —coordinates of the reference line in the PL-UTM system (m);
- —slope of the reference line (–);
- —x-intercept of the reference line (m).
- —coordinates of the i-th perpendicular line in the PL-UTM system (m);
- —numbering of perpendicular lines, increasing southwards (–);
- —mutual distance between successive perpendicular lines (m). For the purposes of this study, it was assumed to be 1 m.
- —reference line intersection points with the i-th perpendicular line in the PL-UTM system (m);
- —TSB intersection points with the i-th perpendicular line in the PL-UTM system (m).
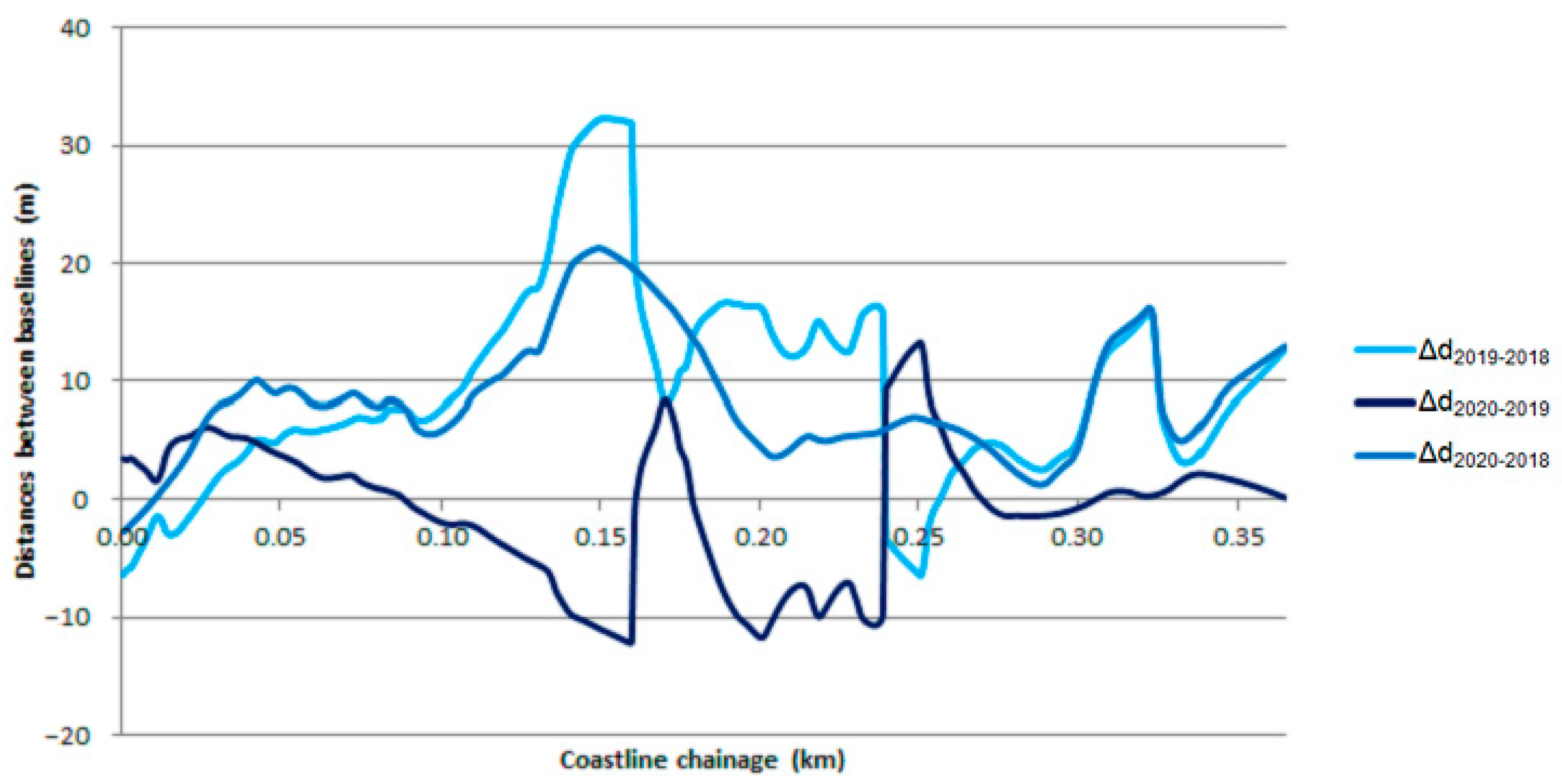
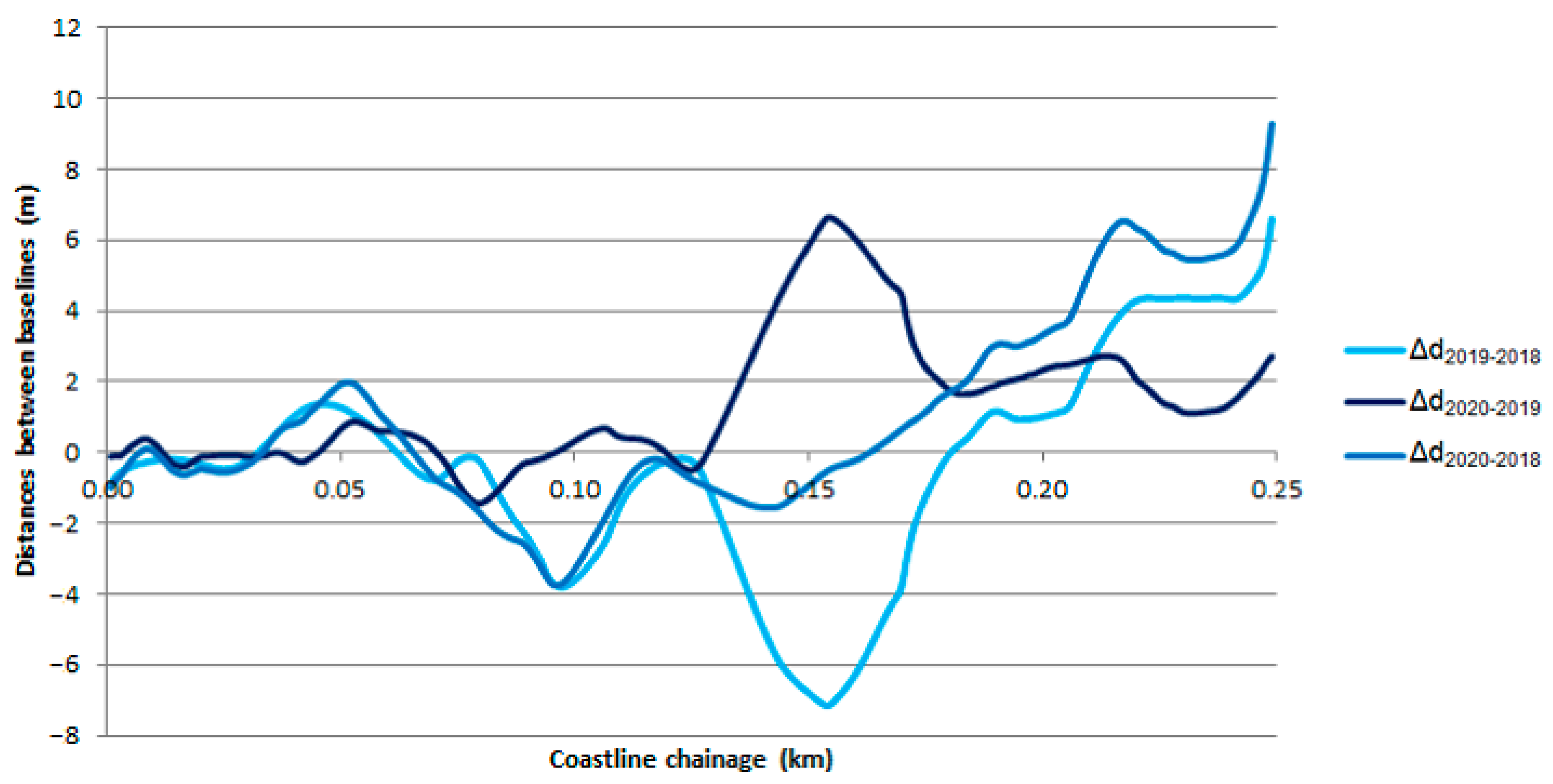
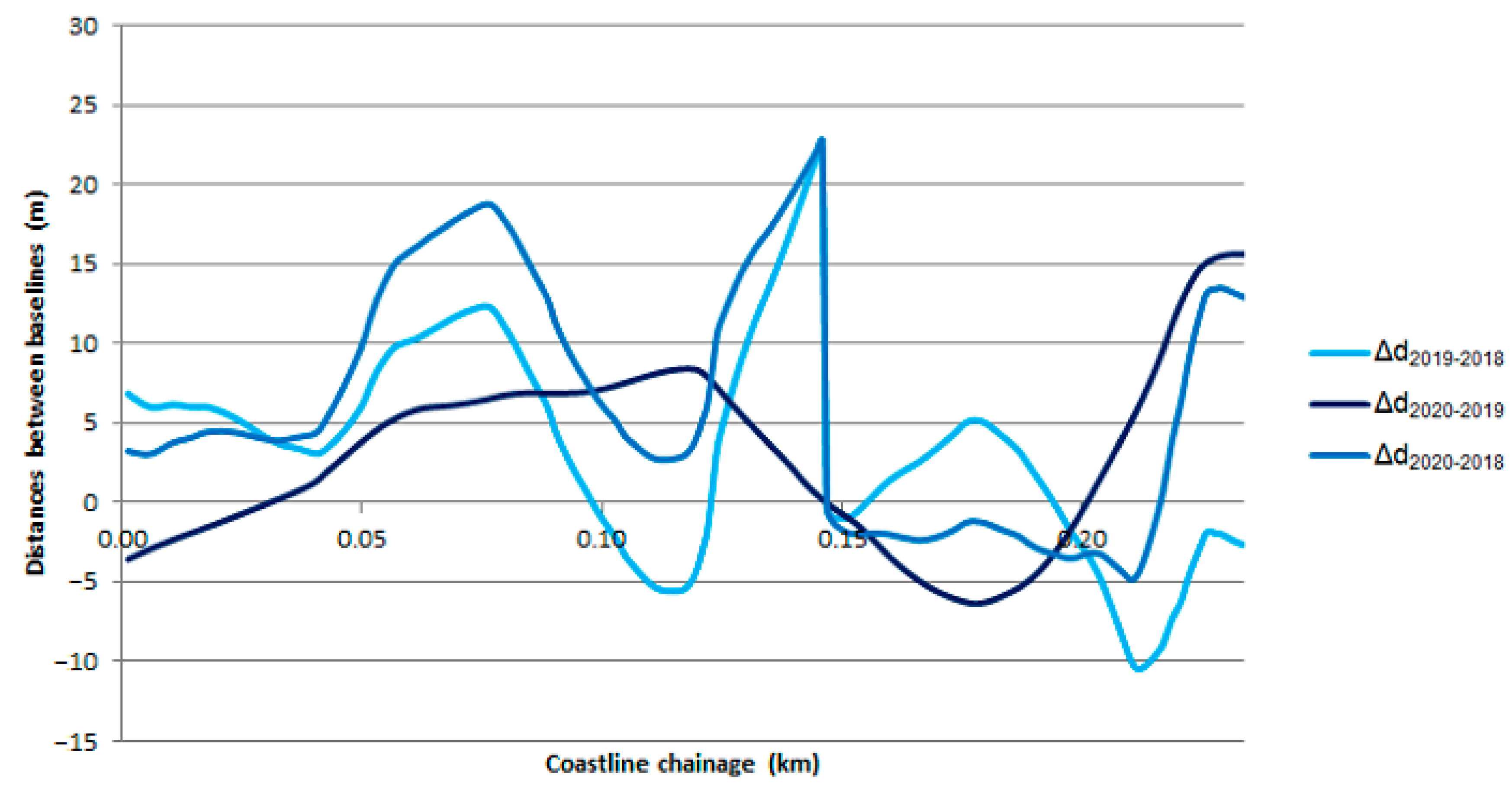
- —distance between the TSB from 2019–2020 and the reference line calculated along the i-th perpendicular line (m),
- —distance between the TSB from 2018–2019 and the reference line calculated along the i-th perpendicular line (m).
- —arithmetic mean of the distances between two selected TSBs from 2018–2020 (m),
- —the number of perpendicular lines (–).
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Klein, N. Litigating International Law Disputes: Weighing the Options; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar]
- Pina-Garcia, F.; Pereda-Garcia, R.; de Luis-Ruiz, J.M.; Perez-Alvarez, R.; Husillos-Rodriguez, R. Determination of Geometry and Measurement of Maritime-terrestrial Lines by Means of Fractals: Application to the Coast of Cantabria (Spain). J. Coast. Res. 2016, 32, 1174–1183. [Google Scholar] [CrossRef]
- Abidin, H.Z.; Sutisna, S.; Padmasari, T.; Villanueva, K.J.; Kahar, J. Geodetic Datum of Indonesian Maritime Boundaries: Status and Problems. Mar. Geod. 2005, 28, 291–304. [Google Scholar] [CrossRef]
- Horemuz, M. Error Calculation in Maritime Delimitation between States with Opposite or Adjacent Coasts. Mar. Geod. 1999, 22, 1–17. [Google Scholar] [CrossRef]
- Ministry of Infrastructure and Development of the Republic of Poland. Justification of the Draft Ordinance of the Council of Ministers on the Detailed Course of the Baseline, External Boundary of the Territorial Sea and the External Boundary of Contiguous Zone of the Republic of Poland. Available online: https://www.senat.gov.pl/download/gfx/senat/pl/senatposiedzeniatematy/2737/drukisejmowe/3661.pdf (accessed on 17 April 2021). (In Polish)
- UNCLOS. United Nations Convention on the Law of the Sea of 10 December 1982; UNCLOS: Montego Bay, Jamaica, 1982.
- Council of Ministers of the Republic of Poland. Ordinance of the Council of Ministers of 13 January 2017 on the Detailed Course of the Baseline, External Boundary of the Territorial Sea and the External Boundary of Contiguous Zone of the Republic of Poland; Council of Ministers of the Republic of Poland: Warsaw, Poland, 2017. (In Polish) [Google Scholar]
- Harsson, B.G.; Preiss, G. Norwegian Baselines, Maritime Boundaries and the UN Convention on the Law of the Sea. Arct. Rev. Law Polit. 2012, 3, 108–129. [Google Scholar]
- Baptista, P.; Bastos, L.; Bernardes, C.; Cunha, T.; Dias, J. Monitoring Sandy Shores Morphologies by DGPS—A Practical Tool to Generate Digital Elevation Models. J. Coast. Res. 2008, 24, 1516–1528. [Google Scholar] [CrossRef]
- Specht, C.; Weintrit, A.; Specht, M.; Dąbrowski, P. Determination of the Territorial Sea Baseline—Measurement Aspect. IOP Conf. Ser. Earth Environ. Sci. 2017, 95, 1–10. [Google Scholar] [CrossRef]
- Kurowski, M.; Thal, J.; Damerius, R.; Korte, H.; Jeinsch, T. Automated Survey in Very Shallow Water Using an Unmanned Surface Vehicle. IFAC PapersOnLine 2019, 52, 146–151. [Google Scholar] [CrossRef]
- Li, C.; Jiang, J.; Duan, F.; Liu, W.; Wang, X.; Bu, L.; Sun, Z.; Yang, G. Modeling and Experimental Testing of an Unmanned Surface Vehicle with Rudderless Double Thrusters. Sensors 2019, 19, 2051. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-varing Disturbances. Appl. Sci. 2018, 8, 547. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Szafran, M.; Makar, A.; Dąbrowski, P.; Lasota, H.; Cywiński, P. The Use of USV to Develop Navigational and Bathymetric Charts of Yacht Ports on the Example of National Sailing Centre in Gdańsk. Remote Sens. 2020, 12, 2585. [Google Scholar] [CrossRef]
- Stateczny, A.; Burdziakowski, P.; Najdecka, K.; Domagalska-Stateczna, B. Accuracy of Trajectory Tracking Based on Nonlinear Guidance Logic for Hydrographic Unmanned Surface Vessels. Sensors 2020, 20, 832. [Google Scholar] [CrossRef]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore Construction Detection by Automotive Radar for the Needs of Autonomous Surface Vehicle Navigation. Int. J. Geo Inf. 2019, 8, 80. [Google Scholar] [CrossRef]
- Wróbel, K.; Weintrit, A. With Regard to the Autonomy in Maritime Operations—Hydrography and Shipping, Interlinked. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 745–749. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Q.; Zhang, J.; Xie, Y. Iterative Learning-based Path and Speed Profile Optimization for an Unmanned Surface Vehicle. Sensors 2020, 20, 439. [Google Scholar] [CrossRef] [PubMed]
- Bažec, M.; Dimc, F.; Pavlovčič-Prešeren, P. Evaluating the Vulnerability of Several Geodetic GNSS Receivers under Chirp Signal L1/E1 Jamming. Sensors 2020, 20, 814. [Google Scholar] [CrossRef] [PubMed]
- Krasuski, K.; Savchuk, S. Determination of the Precise Coordinates of the GPS Reference Station in of a GBAS System in the Air Transport. Commun. Sci. Lett. Univ. Zilina 2020, 22, 11–18. [Google Scholar] [CrossRef]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Multi-GNSS High-rate RTK, PPP and Novel Direct Phase Observation Processing Method: Application to Precise Dynamic Displacement Detection. Meas. Sci. Technol. 2018, 29, 91001. [Google Scholar] [CrossRef]
- Šakan, D.; Kos, S.; Ban, B.D.; Brčić, D. On Linear and Circular Approach to GPS Data Processing: Analyses of the Horizontal Positioning Deviations Based on the Adriatic Region IGS Observables. Data 2021, 6, 9. [Google Scholar] [CrossRef]
- Žic, A.; Pongračić, B.; Kos, S.; Brčić, D. On GPS L1 Positioning Errors’ Estimation in the Adriatic Region. Pomorski Zbornik 2020, 58, 169–184. [Google Scholar]
- Jin, J.; Zhang, J.; Shao, F.; Lv, Z.; Li, M.; Liu, L.; Zhang, P. Active and Passive Underwater Acoustic Applications Using an Unmanned Surface Vehicle. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 10–13 April 2016. [Google Scholar]
- Seto, M.L.; Crawford, A. Autonomous Shallow Water Bathymetric Measurements for Environmental Assessment and Safe Navigation Using USVs. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015. [Google Scholar]
- Stateczny, A.; Burdziakowski, P. Universal Autonomous Control and Management System for Multipurpose Unmanned Surface Vessel. Pol. Marit. Res. 2019, 26, 30–39. [Google Scholar] [CrossRef]
- Wlodarczyk-Sielicka, M.; Stateczny, A. Comparison of Selected Reduction Methods of Bathymetric Data Obtained by Multibeam Echosounder. In Proceedings of the 2016 Baltic Geodetic Congress, Gdańsk, Poland, 2–4 June 2016. [Google Scholar]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A.; et al. The Autonomous Underwater Vehicle Integrated with the Unmanned Surface Vessel Mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef]
- El-Hattab, A.I. Investigating the Effects of Hydrographic Survey Uncertainty on Dredge Quantity Estimation. Mar. Geod. 2014, 37, 389–403. [Google Scholar] [CrossRef]
- Jang, W.S.; Park, H.S.; Seo, K.Y.; Kim, Y.K. Analysis of Positioning Accuracy Using Multi Differential GNSS in Coast and Port Area of South Korea. J. Coast. Res. 2016, 75, 1337–1341. [Google Scholar] [CrossRef]
- Specht, C.; Specht, M.; Cywiński, P.; Skóra, M.; Marchel, Ł.; Szychowski, P. A New Method for Determining the Territorial Sea Baseline Using an Unmanned, Hydrographic Surface Vessel. J. Coast. Res. 2019, 35, 925–936. [Google Scholar] [CrossRef]
- Angnuureng, D.B.; Jayson-Quashigah, P.-N.; Almar, R.; Stieglitz, T.C.; Anthony, E.J.; Aheto, D.W.; Addo, K.A. Application of Shore-based Video and Unmanned Aerial Vehicles (Drones): Complementary Tools for Beach Studies. Remote Sens. 2020, 12, 394. [Google Scholar] [CrossRef]
- Casella, E.; Drechsel, J.; Winter, C.; Benninghoff, M.; Rovere, A. Accuracy of Sand Beach Topography Surveying by Drones and Photogrammetry. Geo Mar. Lett. 2020, 40, 255–268. [Google Scholar] [CrossRef]
- Contreras-de-Villar, F.; García, F.J.; Muñoz-Perez, J.J.; Contreras-de-Villar, A.; Ruiz-Ortiz, V.; Lopez, P.; Garcia-López, S.; Jigena, B. Beach Leveling Using a Remotely Piloted Aircraft System (RPAS): Problems and Solutions. J. Mar. Sci. Eng. 2021, 9, 19. [Google Scholar] [CrossRef]
- Genchi, S.A.; Vitale, A.J.; Perillo, G.M.E.; Seitz, C.; Delrieux, C.A. Mapping Topobathymetry in a Shallow Tidal Environment Using Low-cost Technology. Remote Sens. 2020, 12, 1394. [Google Scholar] [CrossRef]
- Lowe, M.K.; Adnan, F.A.F.; Hamylton, S.M.; Carvalho, R.C.; Woodroffe, C.D. Assessing Reef-island Shoreline Change Using UAV-derived Orthomosaics and Digital Surface Models. Drones 2019, 3, 44. [Google Scholar] [CrossRef]
- Kim, H.; Lee, S.B.; Min, K.S. Shoreline Change Analysis Using Airborne LiDAR Bathymetry for Coastal Monitoring. J. Coast. Res. 2017, 79, 269–273. [Google Scholar] [CrossRef]
- Alcaras, E.; Parente, C.; Vallario, A. Automation of Pan-Sharpening Methods for Pléiades Images Using GIS Basic Functions. Remote Sens. 2021, 13, 1550. [Google Scholar] [CrossRef]
- Al-Mansoori, S.; Al-Marzouqi, F. Coastline Extraction Using Satellite Imagery and Image Processing. Techniques. Int. J. Curr. Eng. Technol. 2016, 6, 1245–1251. [Google Scholar]
- Maglione, P.; Parente, C.; Vallario, A. Coastline Extraction Using High Resolution WorldView-2 Satellite Imagery. Eur. J. Remote Sens. 2014, 47, 685–699. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Y.; Ling, F.; Liu, Y.; Fang, F. Spatio-temporal Change Detection of Ningbo Coastline Using Landsat Time-series Images during 1976–2015. ISPRS Int. J. Geo Inf. 2017, 6, 68. [Google Scholar] [CrossRef]
- Viaña-Borja, S.P.; Ortega-Sánchez, M. Automatic Methodology to Detect the Coastline from Landsat Images with a New Water Index Assessed on Three Different Spanish Mediterranean Deltas. Remote Sens. 2019, 11, 2186. [Google Scholar] [CrossRef]
- Xu, N. Detecting Coastline Change with All Available Landsat Data over 1986–2015: A Case Study for the State of Texas, USA. Atmosphere 2018, 9, 107. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Wąż, M.; Naus, K.; Grządziel, A.; Iwen, D. Methodology for Performing Territorial Sea Baseline Measurements in Selected Waterbodies of Poland. Appl. Sci. 2019, 9, 3053. [Google Scholar] [CrossRef]
- IHO. IHO Standards for Hydrographic Surveys, 6th ed.; IHO Publication No. 44; IHO: Monte Carlo, Monaco, 2020. [Google Scholar]
- Marchel, Ł.; Specht, C.; Specht, M. Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-precision GNSS RTK Receiver Supported Autopilot. Energies 2020, 13, 5637. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the Steering Precision of a Hydrographic Unmanned Surface Vessel (USV) along Sounding Profiles Using a Low-cost Multi-Global Navigation Satellite System (GNSS) Receiver Supported Autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef]
- Grządziel, A. Single Beam Echo Sounder in Hydrographic Surveys. Marit. Rev. 2006, 4, 11–28. (In Polish) [Google Scholar]
- Cignoni, P.; Montani, C.; Perego, R.; Scopigno, R. Parallel 3D Delaunay Triangulation. Comput. Graph. Forum 1993, 12, 129–142. [Google Scholar] [CrossRef]
- Cohen-Steiner, D.; de Verdiere, E.C.; Yvinec, M. Conforming Delaunay Triangulations in 3D. Comput. Geom. 2004, 28, 217–233. [Google Scholar] [CrossRef]
- Fang, T.-P.; Piegl, L.A. Delaunay Triangulation in Three Dimensions. IEEE Comput. Graph. Appl. 1995, 15, 62–69. [Google Scholar] [CrossRef]
- Liu, Y.; Lo, S.H.; Guan, Z.-Q.; Zhang, H.-W. Boundary Recovery for 3D Delaunay Triangulation. Finite Elem. Anal. Des. 2014, 84, 32–43. [Google Scholar] [CrossRef]
- Lihua, Z.; Shuaidong, J.; Rencan, P.; Jian, D.; Ning, L. A Quantitative Method to Control and Adjust the Accuracy of Adaptive Grid Depth Modeling. Mar. Geod. 2013, 36, 408–427. [Google Scholar] [CrossRef]
- Makar, A. The Sea Bottom Surface Described by Coons Pieces. Sci. J. Marit. Univ. Szczec. 2016, 45, 187–190. [Google Scholar]
- Sassais, R.; Makar, A. Methods to Generate Numerical Models of Terrain for Spatial ENC Presentation. Annu. Navig. 2011, 18, 69–81. [Google Scholar]
- Mujabar, S.; Chandrasekar, N. A Shoreline Change Analysis along the Coast between Kanyakumari and Tuticorin, India, Using Digital Shoreline Analysis System. Geo Spat. Inf. Sci. 2011, 14, 282–293. [Google Scholar]
- Specht, M.; Specht, C.; Lewicka, O.; Makar, A.; Burdziakowski, P.; Dąbrowski, P. Study on the Coastline Evolution in Sopot (2008–2018) Based on Landsat Satellite Imagery. J. Mar. Sci. Eng. 2020, 8, 464. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Wąż, M.; Dąbrowski, P.; Skóra, M.; Marchel, Ł. Determining the Variability of the Territorial Sea Baseline on the Example of Waterbody Adjacent to the Municipal Beach in Gdynia. Appl. Sci. 2019, 9, 3867. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Waterbody | Features | Photograph |
|---|---|---|
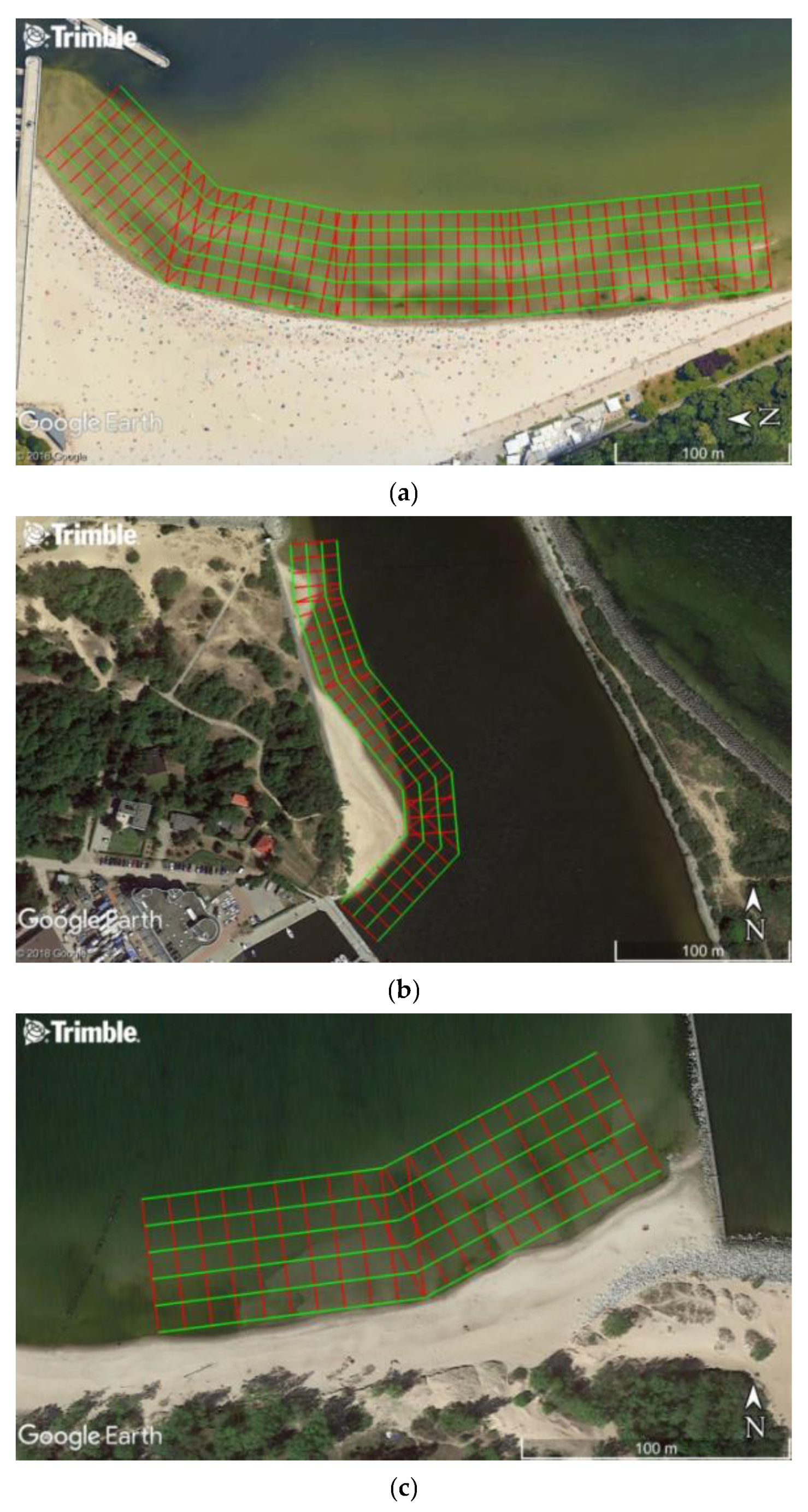
| Waterbody No. 1: Open sea public beach in Gdynia | A waterbody with a typically running, straight coastline. The waterbody length is about 450 m. |  |
| Waterbody No. 2: Vistula Śmiała River mouth near the National Sailing Centre (NSC) in Gdańsk | A waterbody of great dynamics of hydromorphological features (with no hydrotechnical structures). The waterbody length is about 250 m. |  |
| Waterbody No. 3: Exit from a large port area near the entrance to Górki Zachodnie from the Gdańsk Bay | A waterbody with a large number of hydrotechnical structures. The waterbody length is about 250 m. |  |
| Measurement Campaign Number | Measurement Date | Measurement Location | Number of Recorded Points | Measurement Equipment |
|---|---|---|---|---|
| 1 | 19 July 2018 | Waterbody No. 1 | 7204 |  USV: Seafloor Systems HyDrone (after modernization) Autopilot: PixHawk Cube Echosounder: SonarMite BTX GNSS receiver: Trimble R10 |
| 2 | 18 September 2018 | Waterbody No. 2 | 4655 | |
| Waterbody No. 3 | 3446 | |||
| 3 | 25 July 2019 | Waterbody No. 2 | 4048 | |
| Waterbody No. 3 | 3029 | |||
| 4 | 19 September 2019 | Waterbody No. 1 | 8163 | |
| 5 | 8 October 2020 | Waterbody No. 1 | 7204 |  USV: OceanAlpha USV SL20 Autopilot: Not specified Echosounder: Echologger series SBES GNSS receiver: Leica Viva GS 15 |
| Waterbody No. 2 | 3680 | |||
| Waterbody No. 3 | 3741 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Specht, M.; Specht, C.; Stateczny, A.; Marchel, Ł.; Lewicka, O.; Paliszewska-Mojsiuk, M.; Wiśniewska, M. Determining the Seasonal Variability of the Territorial Sea Baseline in Poland (2018–2020) Using Integrated USV/GNSS/SBES Measurements. Energies 2021, 14, 2693. https://doi.org/10.3390/en14092693
Specht M, Specht C, Stateczny A, Marchel Ł, Lewicka O, Paliszewska-Mojsiuk M, Wiśniewska M. Determining the Seasonal Variability of the Territorial Sea Baseline in Poland (2018–2020) Using Integrated USV/GNSS/SBES Measurements. Energies. 2021; 14(9):2693. https://doi.org/10.3390/en14092693
Chicago/Turabian StyleSpecht, Mariusz, Cezary Specht, Andrzej Stateczny, Łukasz Marchel, Oktawia Lewicka, Monika Paliszewska-Mojsiuk, and Marta Wiśniewska. 2021. "Determining the Seasonal Variability of the Territorial Sea Baseline in Poland (2018–2020) Using Integrated USV/GNSS/SBES Measurements" Energies 14, no. 9: 2693. https://doi.org/10.3390/en14092693
APA StyleSpecht, M., Specht, C., Stateczny, A., Marchel, Ł., Lewicka, O., Paliszewska-Mojsiuk, M., & Wiśniewska, M. (2021). Determining the Seasonal Variability of the Territorial Sea Baseline in Poland (2018–2020) Using Integrated USV/GNSS/SBES Measurements. Energies, 14(9), 2693. https://doi.org/10.3390/en14092693