
FPGA-Based Controller for a Hybrid Grid-Connected PV/Wind/Battery Power System with AC Load




Abstract
1. Introduction
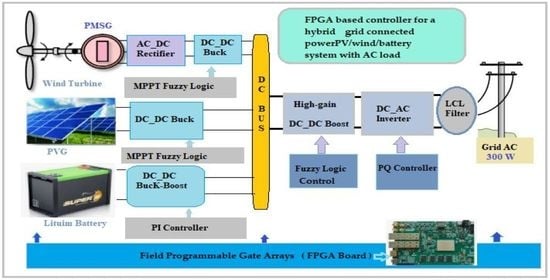
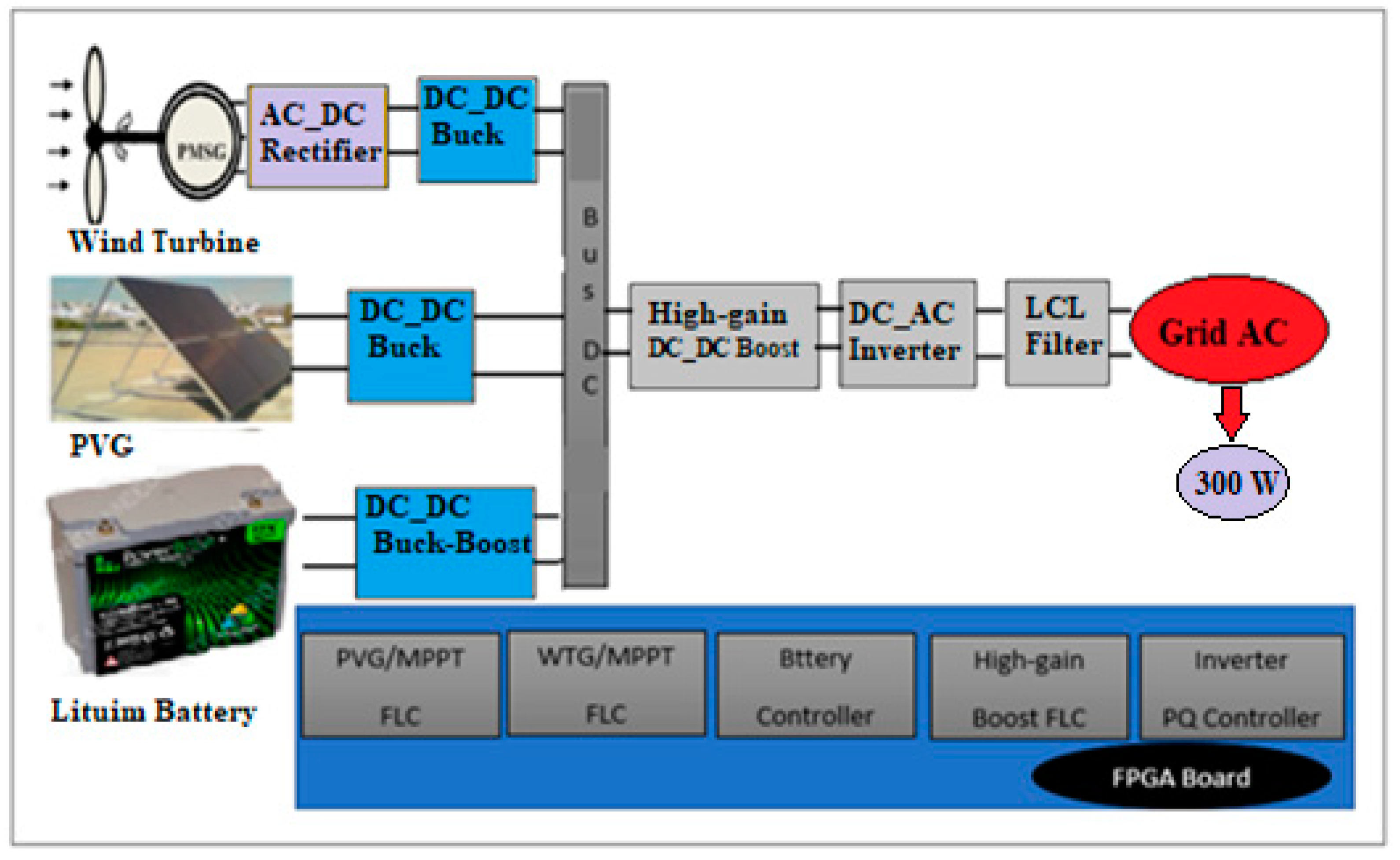
2. Modelling of the Proposed Hybrid Power System
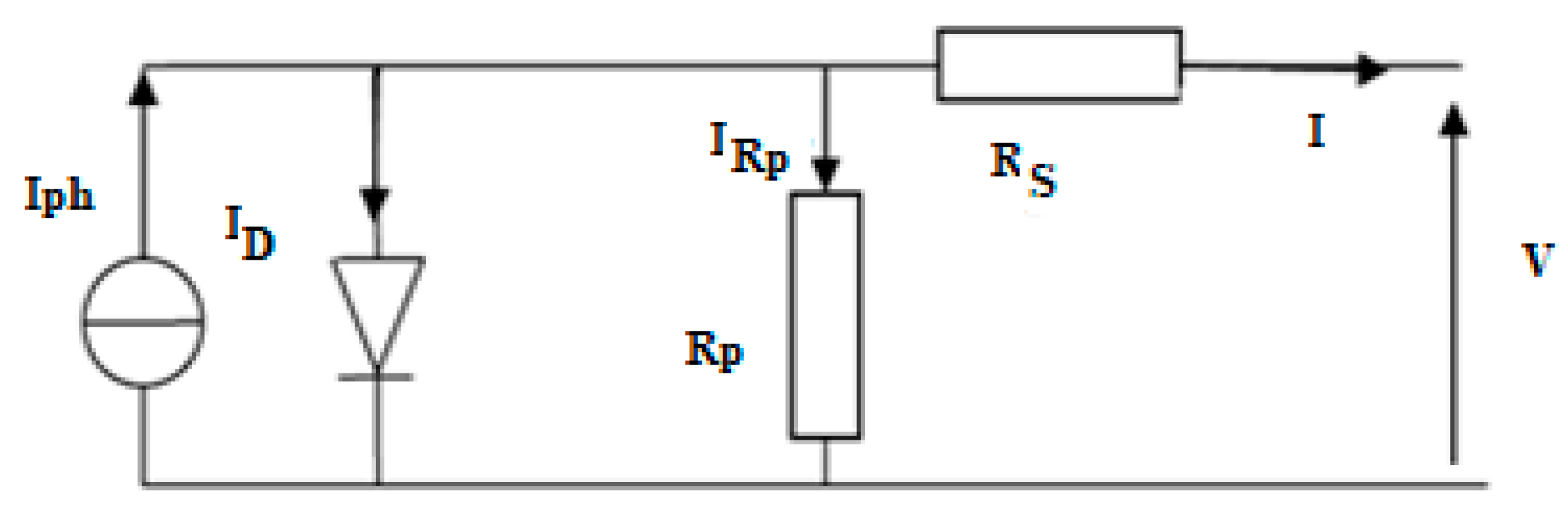
2.1. PVG Model
2.2. WTG Model
2.3. Lithium Battery Model
2.4. High-Voltage Gain DC-DC Converter
3. Control Strategies of the Proposed System
- MPPT fuzzy logic, to produce the maximum power;
- controller for voltage and current regulation of the battery;
- fuzzy logic regulator for the high gain DC-DC converter to rise the voltage value from 24 V to 400 V; and
- active-reactive inverter controller.
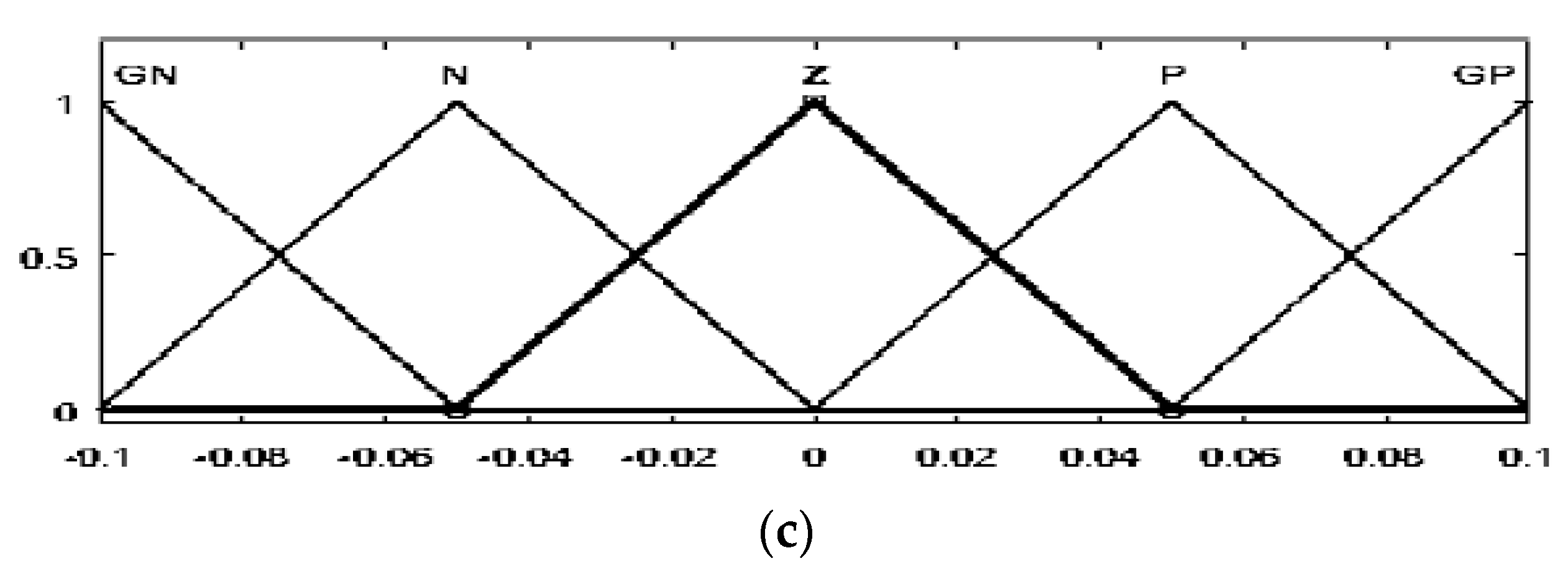
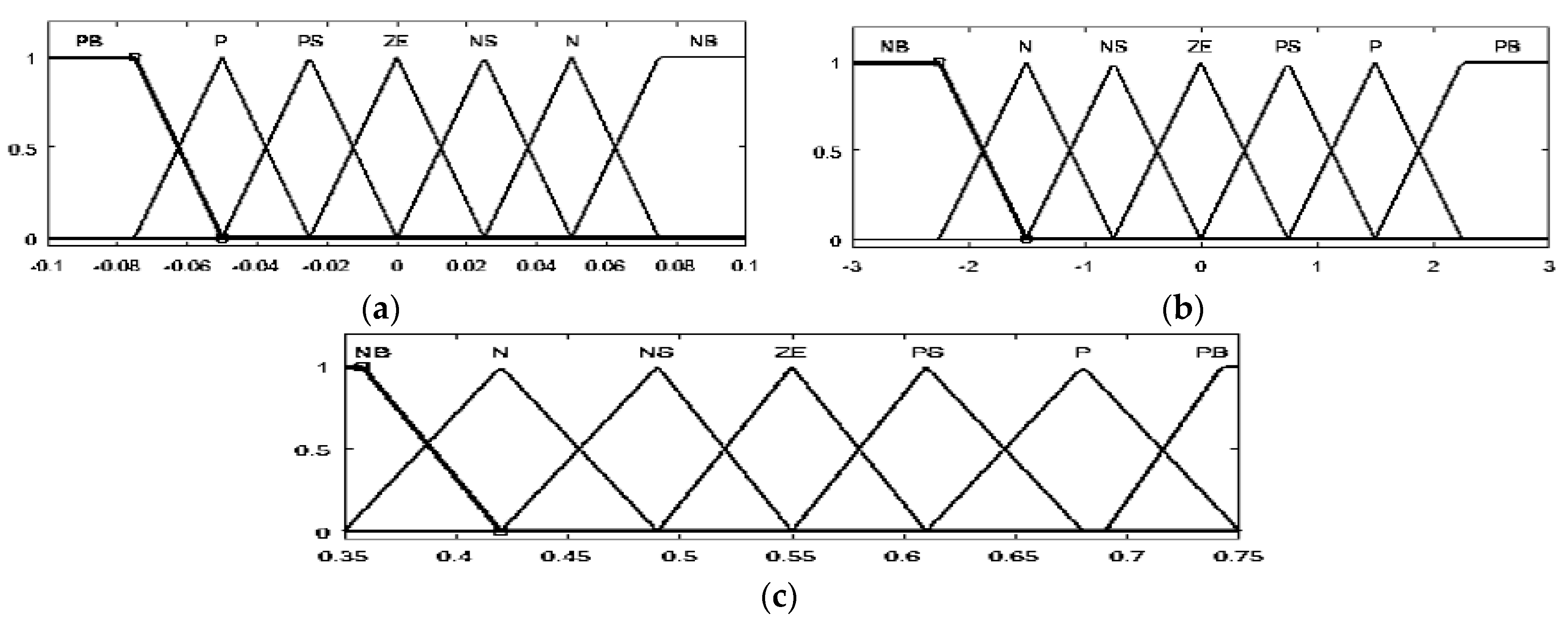
3.1. MPPT Based on Fuzzy Logic Control
3.2. High-Voltage DC-DC Converter Controller
3.3. AC-DC Inverter Controller
3.4. PI Controller for the Battery System
4. Architecture of the Fuzzy Logic Controller on FPGA
5. Simulation and Results
5.1. Simulation Results in Matlab Simulink
5.1.1. Simulation Results of the PVG
5.1.2. Simulation Results of the WTG
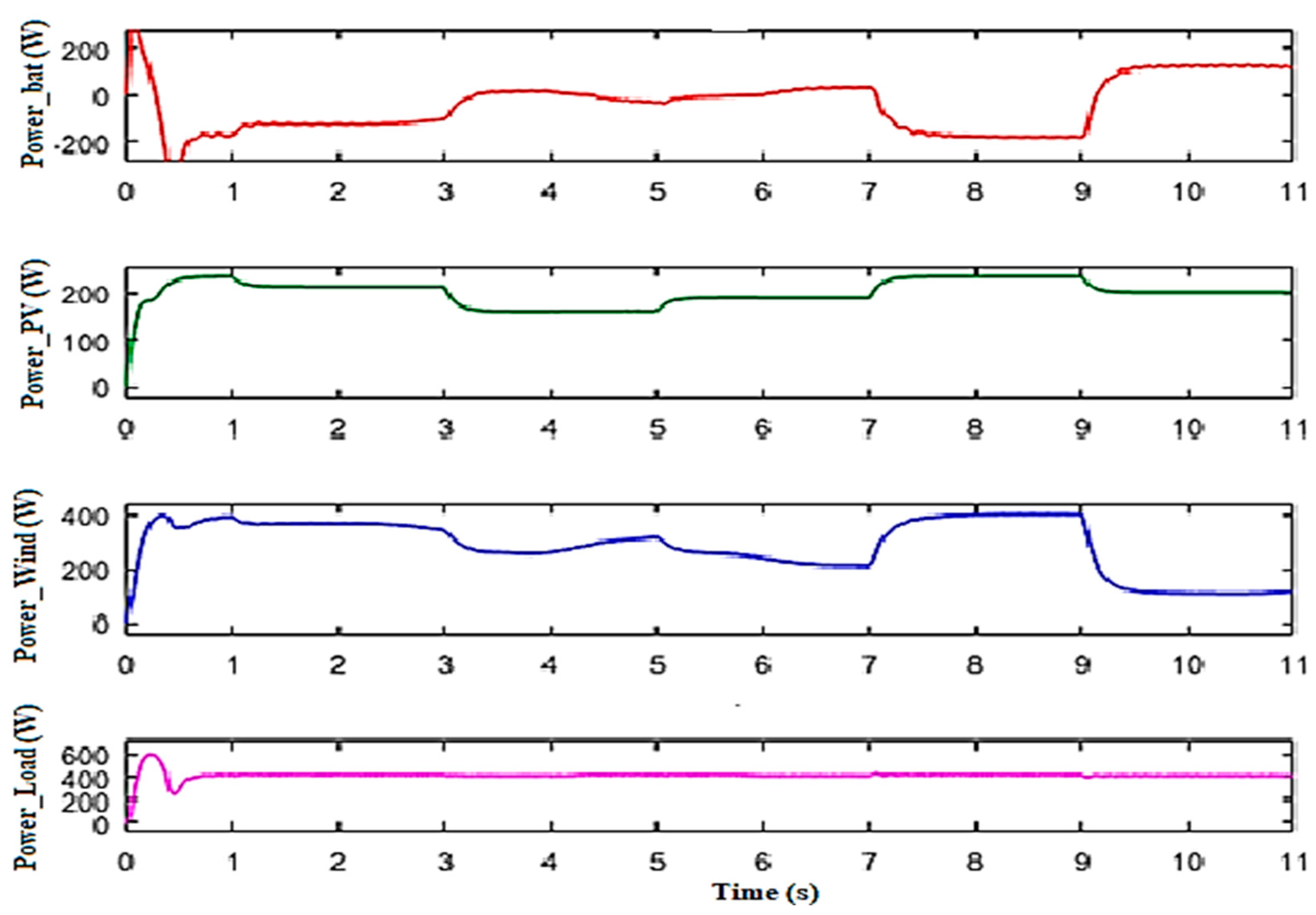
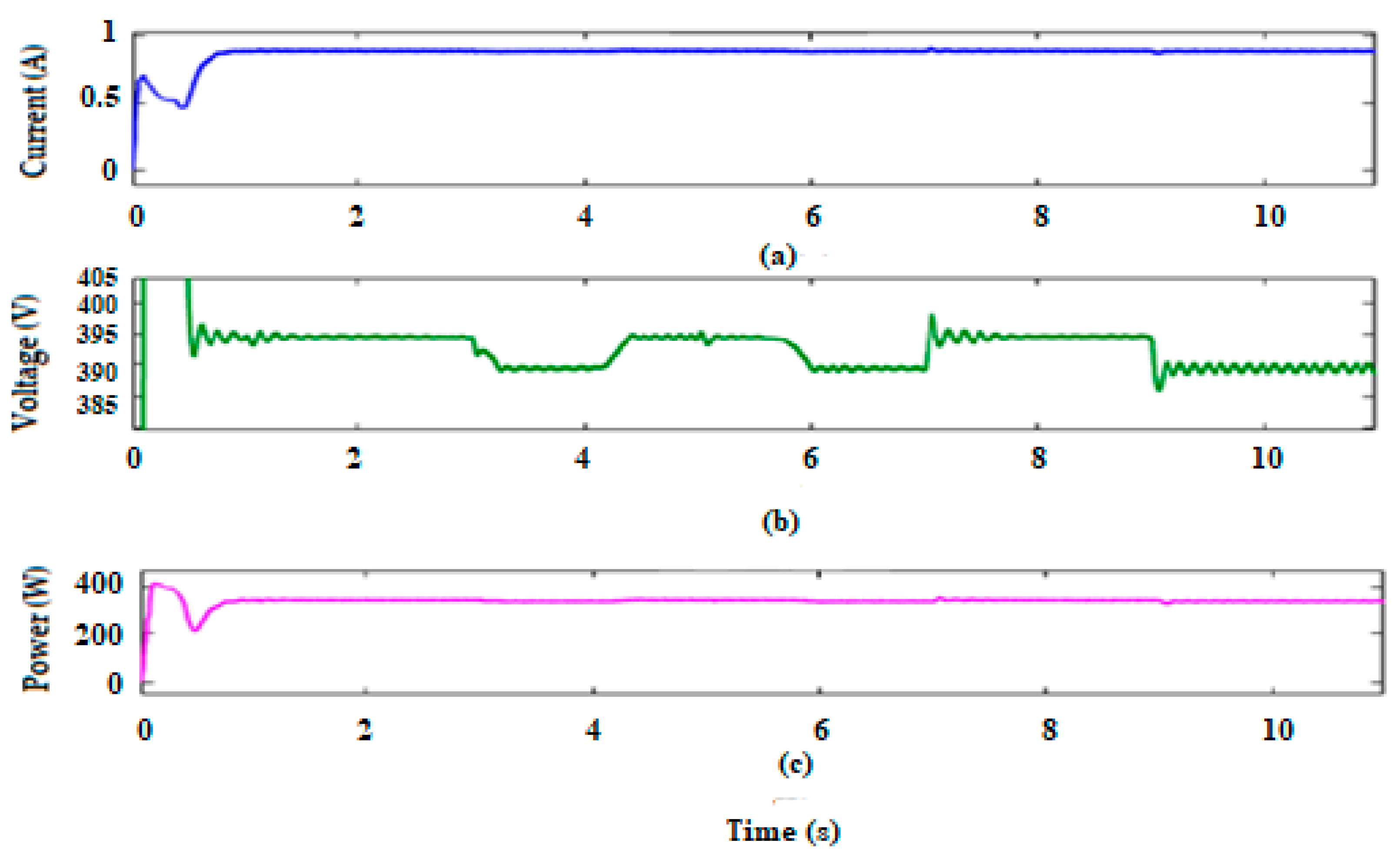
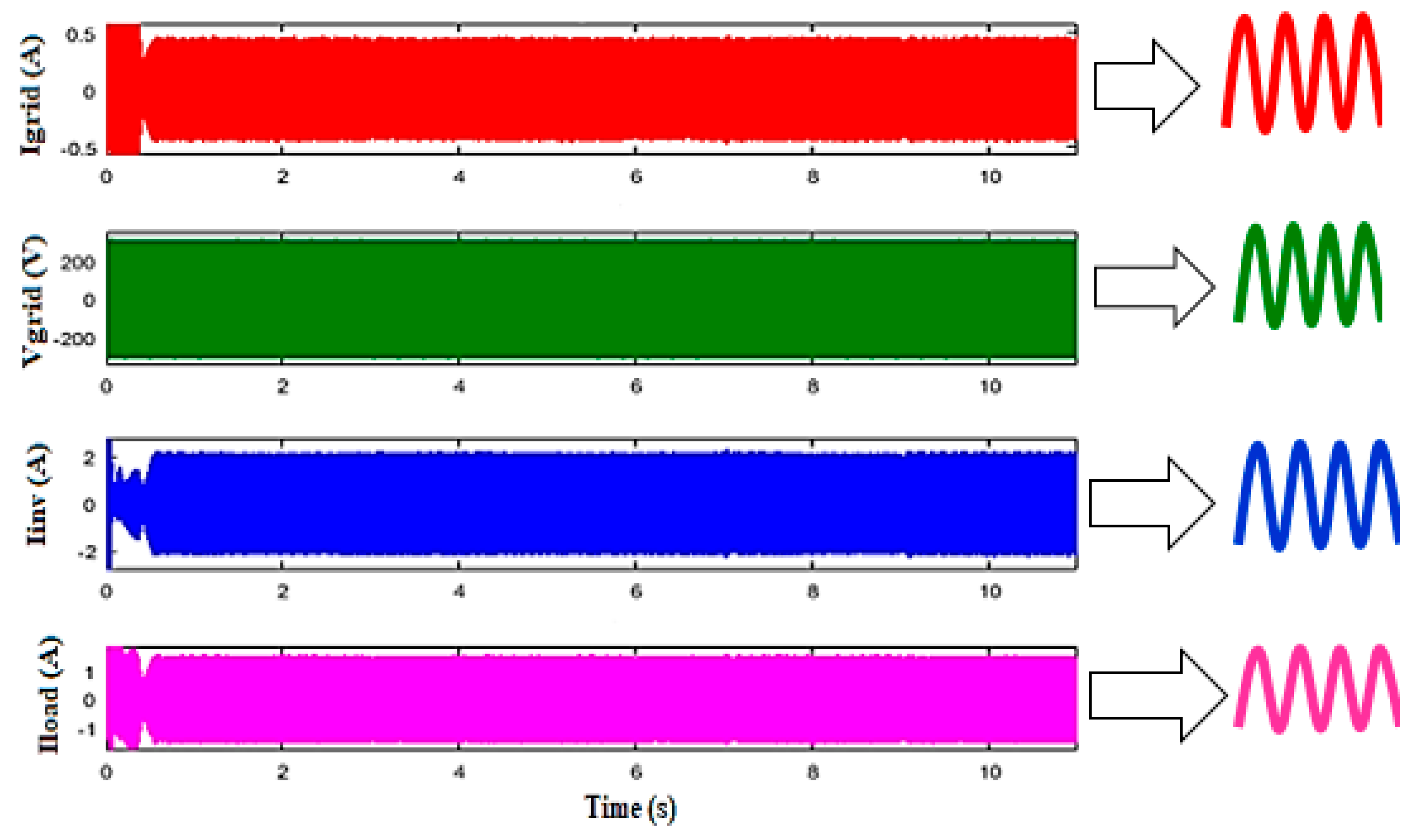
5.1.3. Various Simulation Results of the Proposed System
5.2. Synthesis of Commands Proposed on the FPGA Card
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PVG | Photovoltaic generator |
| WTG | Wind turbine generator |
| MPPT | Maximum power point tracking |
| NCO | Numerically controlled oscillator |
| FPGA | Field programmable gate arrays |
| ISE | Integrated synthesis environment |
Nomenclature
| I | The output current of the PVG |
| Iph | The photocurrent of the solar panel |
| ID | The diode current of the solar panel |
| a | The ideality factor |
| k | The Botzman constant |
| K1 | The temperature coefficient in current |
| T | The temperature |
| Tref | The reference temperature |
| q | The elementary charge in Coulombs |
| G | The irradiance |
| Gref | The reference irradiance |
| Eg | The gap energy |
| V | The voltage |
| P | The power |
| T | The switch |
| DC | Direct current |
| AC | Alternating current |
References
- Petreus, D.; Daraban, S.; Cirstea, M.N. Modular Hybrid Energy Concept Employing a Novel Control Structure Based on a Simple Analog System. Adv. Electr. Comput. Eng. 2016, 16, 3–10. [Google Scholar] [CrossRef]
- Barote, L.; Marinescu, C. Modeling and Operational Testing of an Isolated Variable Speed PMSG Wind Turbine with Battery Energy Storage. Adv. Electr. Comput. Eng. 2012, 12, 69–76. [Google Scholar] [CrossRef]
- Sakthivel, B.K.; Devaraj, D. Modelling, Simulation and Performance Evaluation of Solar PV-Wind Hybrid Energy System. IEEE Electr. Electron. Signals Commun. Optim. 2015, 24–25. [Google Scholar]
- Grouz, F.; Sbita, L. A safe and easy methodology for design and sizing of a stand-alone hybrid PV-wind system. In Proceedings of the 2014 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Tunis, Tunisia, 3–6 November 2014; pp. 1–8. [Google Scholar]
- Yang, B.; Li, W.H.; Zhao, Y.; He, X.N. Design and Analysis of a Grid-Connected Photovoltaic Power System. IEEE Trans. Power Electron. 2010, 25, 992–1000. [Google Scholar] [CrossRef]
- Borowy, B.S.; Salameh, Z.M. Optimum Photovoltaic Array Size for a Hybrid Wind/PV System. IEEE Trans. Energy Convers. 2002, 9, 482–488. [Google Scholar] [CrossRef]
- Chen, Y.-M.; Liu, Y.-C.; Hung, S.-C.; Cheng, C.-S. Multi-Input Inverter for Grid-Connected Hybrid PV/Wind Power System. IEEE Trans. Power Electron. 2007, 22, 1070–1077. [Google Scholar] [CrossRef]
- Loukriz, A.; Haddadi, M.; Messalti, S. Simulation and experimental design of a new advanced variable step size Incremental Conductance MPPT algorithm for PV systems. ISA Trans. 2016, 62, 30–38. [Google Scholar] [CrossRef] [PubMed]
- Baghdadi, F.; Mohammedi, K.; Diaf, S.; Behar, O. Feasibility study and energy conversion analysis of stand-alone hybrid renewable energy system. Energy Convers. Manag. 2015, 105, 471–479. [Google Scholar] [CrossRef]
- Mahesh, A.; Sandhu, K.S. Hybrid wind/photovoltaic energy system developments: Critical review and findings. Renew. Sustain. Energy Rev. 2015, 52, 1135–1147. [Google Scholar] [CrossRef]
- Messalti, S.; Harrag, A.; Loukriz, A. A new variable step size neural networks MPPT controller: Review simulation and hardware implementation. Renew. Sustain. Energy Rev. 2017, 68, 221–233. [Google Scholar] [CrossRef]
- Arfaoui, J.; Feki, E.; Rabhi, A.; Mami, A. Optimization of Scaling Factors of Fuzzy–MPPT Controller for Stand-alone Photovoltaic System by Particle Swarm Optimization. In Proceedings of the 8th International Conference on Sustainability in Energy and Buildings, SEB-16, Turin, Italy, 11–13 September 2016. [Google Scholar]
- Othmani, H.; Mezghani, D.; Belaid, A.; Mami, A. New Approach of Incremental Conductance Algorithm for Maximum Power Point Tracking Based on Fuzzy Logic. Int. J. Grid Distrib. Comput. 2016, 9, 121–132. [Google Scholar] [CrossRef]
- Yilmaz, U.; Kircay, A.; Borekci, S. PV system fuzzy logic MPPT method and PI control as a charge controller. Renew. Sustain. Energy Rev. 2018, 81, 994–1001. [Google Scholar] [CrossRef]
- Riahi, J.; Vergura, S.; Mezghani, D.; Mami, A. A combined PV-wind energy system for an energy saving greenhouse. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
- Nguyen, M.K.; Duong, T.D.; Lim, Y.C.; Kim, Y.J. Isolated Boost DC-DC Converter with Three Switches. IEEE Trans. Power Electron. 2018, 33, 1389–1398. [Google Scholar]
- Lu, Y.; Wu, H.; Sun, K.; Xing, Y. A Family of Isolated Buck-Boost Converters Based on Semi-active Rectifiers for High Output Voltage Applications. IEEE Trans. Power Electron. 2016, 31, 6327–6340. [Google Scholar] [CrossRef]
- Gandhi, V.I.; Subramaniyaswamy, V.; Logesh, R. Topological review and analysis of DC-DC boost converters. J. Eng. Sci. Technol. 2017, 12, 1541–1567. [Google Scholar]
- Babaei, E.; Saadatizadeh, Z. High voltage gain dc–dc converters based on coupled inductors. IET Power Electron. 2018, 11, 434–452. [Google Scholar] [CrossRef]
- Baddipadiga, B.P.R.; Prabhala, V.A.K.; Ferdowsi, M. A Family of High-Voltage-Gain DC–DC Converters Based on a Generalized Structure. IEEE Trans. Power Electron. 2018, 33, 8399–8411. [Google Scholar] [CrossRef]
- Cóbreces, S.; Griñó, R. Hysteretic control of grid-side current for a single-phase LCL grid-connected voltage source converter. Math. Comput. Simul. 2016, 130, 194–211. [Google Scholar] [CrossRef][Green Version]
- Wu, F.; Li, X.; Duan, J. Improved Elimination Scheme of Current Zero-Crossing Distortion in Unipolar Hysteresis Current Controlled Grid-Connected Inverter. IEEE Trans. Ind. Inform. 2015, 11, 1111–1118. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B. Model Predictive Control of Wind Energy Conversion Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Cunningham, S.C. Theory, Simulation, and Implementation of Grid Connected Back to Back Converters Utilizing Voltage Oriented Control. Master’s Thesis, University of Wisconsin-Milwaukee, Milwaukee, WI, USA, 2017. [Google Scholar]
- Komurcugil, H.; Altin, N.; Ozdemir, S.; Sefa, I. Lyapunov-Function and Proportional-Resonant Based Control Strategy for Single-Phase Grid-Connected VSI with LCL Filter. IEEE Trans. Ind. Electron. 2016, 63, 2838–2849. [Google Scholar] [CrossRef]
- Abusara, M.; Sharkh, S.M.; Zanchetta, P. Pericle Control of grid-connected inverters using adaptive repetitive and proportional resonant schemes. J. Power Electron. 2015, 15, 518–529. [Google Scholar] [CrossRef]
- Chettibi, N.; Mellit, A. Fpga-based real time simulation and control of grid-connected photovoltaic systems. Simul. Model. Pract. Theory 2014, 43, 34–53. [Google Scholar] [CrossRef]
- Chettibi, N.; Mellit, A. Study on Control of Hybrid Photovoltaic-Wind Power System Using Xilinx System Generator. In Solar Photovoltaic Power Plants; Springer: Singapore, 2019; pp. 97–120. [Google Scholar]
- Badwawi, R.A.; Abusara, M.; Mallick, T. A Review of Hybrid Solar PV and Wind Energy System. Smart Sci. 2015, 3, 127–138. [Google Scholar] [CrossRef]
- Mangu, B.; Akshatha, S.; Suryanarayana, D.; Fernandes, B.G. Grid-Connected PV-Win-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter for Household Applications. IEEE J. Emerg. Select. Topics Power Electron. 2016, 4. [Google Scholar] [CrossRef]
- Basaran, K.; Cetin, N.S.; Borekci, S. Energy management for on-grid and off-grid wind/PV and battery hybrid systems. IET Renew. Power Gener 2017, 11, 642–649. [Google Scholar] [CrossRef]
- Jomaa, M.; Allani, M.Y.; Tadeo, F.; Mami, A. Design and control of the hybrid system PV-Wind connected to the DC load. In Proceedings of the 2018 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018; pp. 1–6. [Google Scholar]
- Allani, M.Y.; Jomaa, M.; Mezghani, D.; Mami, A. Modelling and simulation of the hybrid system PV-wind with MATLAB/SIMULINK. In Proceedings of the 2018 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018; pp. 1–6. [Google Scholar]
- Chong, L.W.; Wong, Y.W.; Rajkumar, R.K.; Rajkumar, R.K.; Isa, D. Hybrid energy storage systems and control strategies for stand-alone renewable energy power systems. Renew. Sustain. Energy Rev. 2016, 66, 174–189. [Google Scholar] [CrossRef]
- Fathima, A.H.; Palanisamy, K. Optimization in microgrids with hybrid energy systems—A review. Renew. Sustain. Energy Rev. 2015, 45, 431–446. [Google Scholar] [CrossRef]
- Benlahbib, B.; Bouarroudj, N.; Mekhilef, S.; Abdelkrim, T.; Lakhdari, A.; Bouchafaa, F. A fuzzy logic controller based on maximum power point tracking algorithm for partially shaded PV array-experimental validation. Elektronika ir Elektrotechnika 2018, 4, 38–44. [Google Scholar] [CrossRef]
- Lee, J.; Kim, Y.S. Sensorless fuzzy-logic-based maximum power point tracking control for a small-scale wind power generation system with a switched mode rectifier. IET Renew. Power Gener. 2016, 10, 194–202. [Google Scholar] [CrossRef]
- Riahi, J.; Vergura, S.; Mezghani, D.; Mami, A. Intelligent Control of the Microclimate of an Agricultural Greenhouse Powered by a Supporting PV System. Appl. Sci. 2020, 10, 1350. [Google Scholar] [CrossRef]
- Borowy, B.S.; Salameh, Z.M. Methodology for optimally sizing the combination of a battery bank and PV array in a Wind/PV hybrid system. IEEE Trans. Energy Convers. 1996, 11, 367–373. [Google Scholar] [CrossRef]
- Daud, A.K.; Ismail, M.S. Design of isolated hybrid systems minimizing costs and pollutant emissions. Renew. Energy 2012, 44, 215–224. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters of PV | Values and Units |
|---|---|
| Cells per Module | 61 |
| Pmax | 60.3 W |
| VPV at Pmax | 67 V |
| IPV at Pmax | 0.9 A |
| VO (Open Circuit Voltage) | 91.8 V |
| IS (Short Circuit Current) | 1.19 A |
| a | 2.1922 |
| RS (Series Resistance) | 5.8 ohms |
| RSh (Shunt Resistance) | 254.8 ohms |
| Parameters | Values |
|---|---|
| Rotor Diameter | 46 in (1.15 m) |
| Weight | 13 lb (5.85 kg) |
| Start Up Wind Speed | 15.6 mph (7.5 m/s) |
| Voltage | 24 VDC |
| Rated Power | 386 W at 28 mph (12.5 m/s) |
| Base Rotational Speed | 1700 rpm |
| Initial Rotational Speed | 500 rpm |
| Rotor Diameter | 46 in (1.15 m) |
| Weight | 13 lb (5.85 kg) |
| Start Up Wind Speed | 15.6 mph (7.5 m/s) |
| Voltage | 24 VDC |
| Rated Power | 386 W at 28 mph (12.5 m/s) |
| E\dE | GN | N | Z | P | GP |
|---|---|---|---|---|---|
| GN | Z | Z | GP | GP | GP |
| N | Z | Z | P | P | P |
| Z | P | Z | Z | Z | N |
| P | N | N | N | Z | Z |
| GP | GN | GN | GN | Z | Z |
| Logic Utilization | PVG Control | WTG Control | Converter Control | Battery Control | Inverter Control | Sum |
|---|---|---|---|---|---|---|
| Number of Slice Registers | 0% | 0% | 0% | 0% | 0% | 0% |
| Number of Slice Lookup Table LUTs | 2% | 2% | 4% | 4% | 1% | 13% |
| Number of Fully used Lookup TableFlip-Flop LUT-FF Pairs | 0% | 0% | 0% | 0% | 28% | 28% |
| Number of Bonded Input Output Block IOBs | 7% | 7% | 9% | 9% | 36% | 68% |
| Number of Global Clock Buffer(BUFG)/Global Clock Buffer Control (BUFGCTRLs) | 3% | 3% | 3% | 3% | 6% | 18% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allani, M.Y.; Riahi, J.; Vergura, S.; Mami, A. FPGA-Based Controller for a Hybrid Grid-Connected PV/Wind/Battery Power System with AC Load. Energies 2021, 14, 2108. https://doi.org/10.3390/en14082108
Allani MY, Riahi J, Vergura S, Mami A. FPGA-Based Controller for a Hybrid Grid-Connected PV/Wind/Battery Power System with AC Load. Energies. 2021; 14(8):2108. https://doi.org/10.3390/en14082108
Chicago/Turabian StyleAllani, Mohamed Yassine, Jamel Riahi, Silvano Vergura, and Abdelkader Mami. 2021. "FPGA-Based Controller for a Hybrid Grid-Connected PV/Wind/Battery Power System with AC Load" Energies 14, no. 8: 2108. https://doi.org/10.3390/en14082108
APA StyleAllani, M. Y., Riahi, J., Vergura, S., & Mami, A. (2021). FPGA-Based Controller for a Hybrid Grid-Connected PV/Wind/Battery Power System with AC Load. Energies, 14(8), 2108. https://doi.org/10.3390/en14082108