1. Introduction
The hysteresis phenomenon is a characteristic feature of any magnetic circuit containing a ferromagnetic material. This phenomenon is related to a certain delay in changes in the magnetic flux density in relation to changes in the magnetic field strength in this material. The hysteresis mechanism is quite well known [
1,
2,
3,
4,
5,
6,
7]; however, the formulation of an appropriate mathematical model based on the knowledge of the phenomena describing the magnetization process is still a complex issue. Therefore, for many decades, intensive research has been carried out to develop a hysteresis model that would be sufficiently accurate and useful in the field calculations of ferromagnetic materials.
On a micro scale, the study of magnetization processes is often based on the Landau–Lifschitz–Gilbert equation, which describes the behavior of a single magnetic dipole in an external magnetic field [
4,
5,
6,
8]. The original equation formulated by Landau–Lifschitz was modified by Gilbert to take into account the damping conditions of the magnetic moment rotation, which in the steady state will occupy a position along the direction of the magnetic field strength. As stated in a previous study [
9], the calculation results obtained on the basis of the Landau–Lifschitz–Gilbert equation “can be averaged to provide hysteresis curves of material”. However, it should be mentioned that hysteresis curves of ferromagnetic materials are also often described by different empirical fitting procedures.
The best known models, which are based on energy relationships, are the Stoner–Wohlfarth and Jiles–Atherton models. The former presents the magnetization process as rotations of magnetic moments of non-interacting single-domain particles [
10,
11,
12]. To take into account the interaction of particles, the concept of the effective field has been introduced, which is the sum of the field strength of the external magnetic field and the product of the magnetization and a certain dimensionless mean field parameter [
4,
8,
10,
11,
12,
13]. The resultant magnetization vector in the Stoner–Wohlfarth model is a sum of the magnetizations of single particles aligned along specified directions. However, displacements of the domain wall are not considered. The application of this model for macroscopic samples must specify a certain number of directions for a particular ferromagnetic material. Therefore, computation times are relatively long, and they depend directly on the number of specified directions.
The assumption that the energy supplied to a sample of an isotropic polycrystalline material is a sum of the change in the magnetostatic energy and hysteresis loss is the basis for the Jiles–Atherton model [
5,
9,
11,
12]. This model requires five physical parameters to describe hysteresis curves. However, in many instances, these parameters must be modified to obtain an effective representation of the measured waveforms. One difficulty is the determination of an anhysteretic curve because this curve is a theoretical curve. The Jiles–Atherton model is used in modelling relatively narrow hysteresis loops. Frequently, the model parameters should be determined for almost each amplitude of the field strength. This causes a certain inconvenience when using this model; nevertheless, this model and its modifications are still used [
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25].
The phenomenological Preisach model assumes that a considered ferromagnetic material consists of particles (hysterons), which are magnetized to a positive or negative saturation. A characteristic feature of this model is the Preisach triangle consisting of the following two parts: the first part refers to positively magnetized particles, and the second part refers to negatively magnetized particles. A certain distribution function, whose determination is time-consuming, describes how many hysterons are located at particular points of the Preisach triangle. This model enables the creation of any hysteresis or minor loop, depending on an appropriate distribution function. However, long calculation times and dependence on the degree of Preisach triangle discretization are significant disadvantages of this model. The Preisach model is still modified and often used in different applications [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36].
Hysteresis models formulated with the use of special operators, the so-called ‘play’ and ‘stop’ hysterons, are also phenomenological [
37]. These types of models were developed by Matsuo et al. [
38,
39,
40,
41]. Some hysteresis models are based on certain differential equations that relate the magnetic field strength to the magnetic flux density. However, these equations do not result directly from the mechanism of phenomena occurring in the magnetization process. The Hodgdon model belongs to this category [
11,
42]. The determination of functions occurring in the Hodgdon model is time-consuming and requires a series of tests. Note that slight changes in the parameters of these functions significantly affect the shape of the calculated hysteresis loops.
There are other, less known hysteresis models in the literature. One of them is the Globus model, which assumes that the behavior of the entire ferromagnetic sample can be reduced to one spherical grain [
12]. This group also includes the hysteresis model developed by Chua [
11]. In this model, the resultant magnetic field strength is the sum of the field strength resulting from the hysteresis-free magnetization curve and the field strength dependent on the derivative of the magnetic flux density versus time; in fact, the Chua model is a dynamic model. To describe changes in electrical steel sheets, the Pry and Bean domain model is also applied [
43,
44].
Calculations of the magnetic field distribution in electrical steel sheets often require consideration of the hysteresis phenomenon. These sheets are used in the construction of the magnetic cores of transformers, rotating machines, and other electrical devices. In many scenarios, a certain model of the hysteresis phenomenon must be considered when calculating the magnetic field distribution and hysteresis loss of a tested magnetic circuit. Instead of one unambiguous relationship, these models propose different dependencies between the flux density and field strength as the hysteresis changes. However, the formulation of a suitable mathematical hysteresis model based on the hysteresis mechanism is still a relatively difficult problem. Some magnetic hysteresis models refer to the so-called dynamic hysteresis loop, which considers the effects of eddy currents on changes in flux density. However, in many proposals, eddy currents are considered using separate differential equations [
45,
46].
It should be clearly emphasized that the purpose of this paper is not to formulate a new hysteresis model but rather to present a proposal for approximation of hysteresis changes; this approximation should be easily applicable to equations describing the magnetic field distribution. In calculations, the area of the magnetic field is divided into several dozen or even more thousand elementary segments. Owing to the nonlinear nature of electrical sheets, the magnetic flux density in individual segments changes in different ways. Therefore, the hysteresis phenomenon should be included in all elementary segments concerning a considered ferromagnetic material.
2. Approximation of Flux Density Changes
Each hysteresis model briefly discussed in the previous chapter has advantages and disadvantages. However, note that any model of the magnetic hysteresis should have the following properties:
Easy determination of model parameters;
Possibility of calculations for excitations using a constant component;
Possibility of formulating an inverse model indicating the field strength as a dependence on the flux density;
Relatively simple numerical algorithm;
Short times for numerical calculations;
Easy application of the selected hysteresis model to equations describing the magnetic field distribution.
Irreversible displacements of domain walls are the main cause of the hysteresis phenomenon in soft magnetic materials; these displacements are caused by changes in field strength in a sample of ferromagnetic materials. When the field strength values are low, then the magnetization process is reversible. However, for most soft ferromagnetic materials, particularly for electrical steel sheets, the effect of the reversible magnetization can be neglected. Notably, in a high-value range of the field strength, the magnetization process is also reversible, but then this process refers to reversible rotations of magnetization vectors towards the external magnetic field.
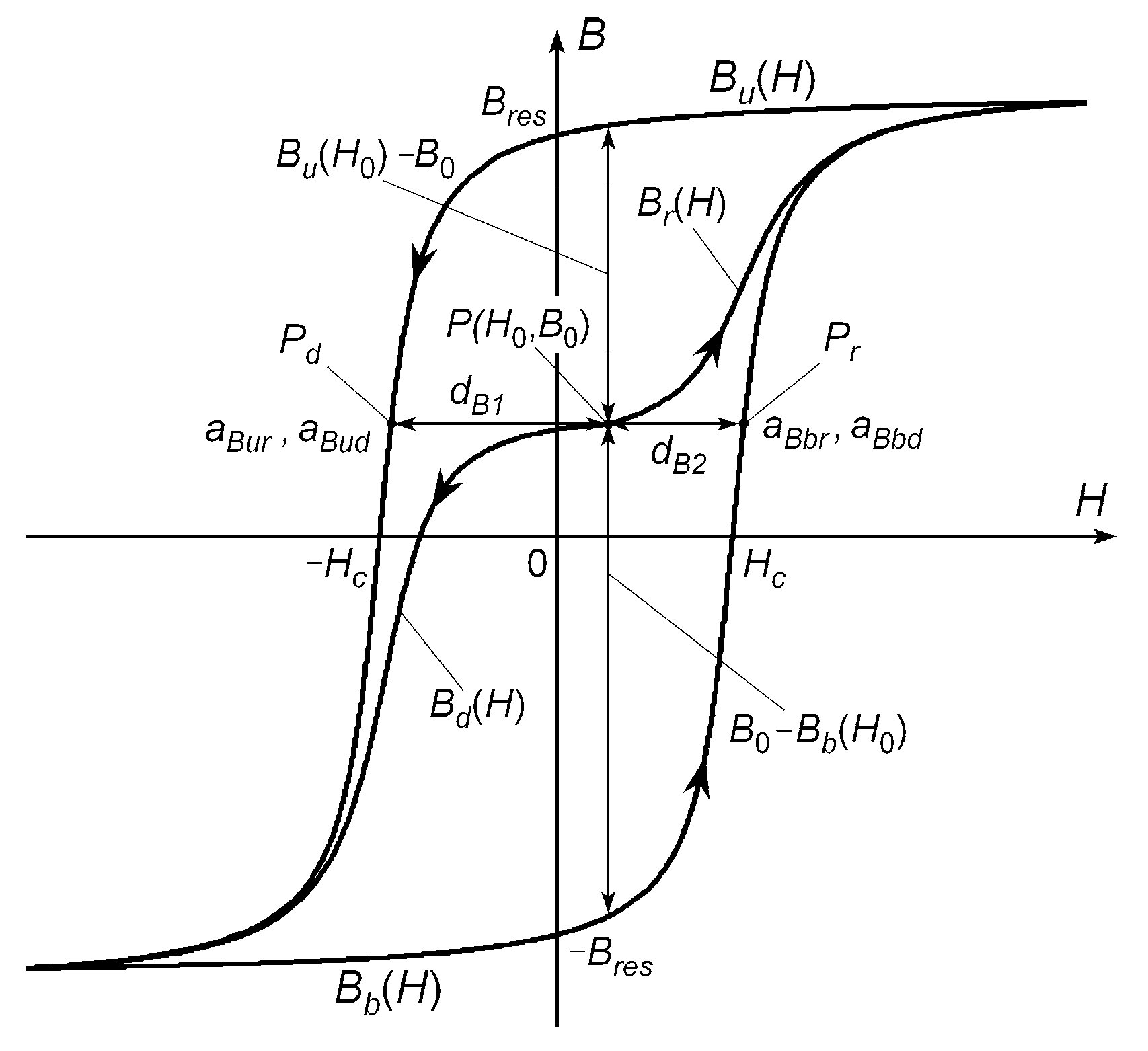
It follows from the nature of the hysteresis phenomenon that any point
P with coordinates (
H0,
B0) inside the limiting hysteresis loop moves along a certain trajectory to the bottom or upper limiting curve depending on changes in the field strength (
Figure 1). This means that the difference
B0 −
Bb(
H0) between the initial flux density
B0 at point
P and the flux density value
Bb(
H0) on the bottom limiting curve determined for
H0 should decrease to zero if the field strength
H increases. Therefore, the difference
B0 −
Bb(
H0) can be treated as an ‘initial value’ of the certain transient component of changes in the flux density of point
P moving to the bottom limiting curve
Bb(
H).
In this paper, the subscripts B and H concern parameters which are related to changes in the flux density or magnetic field, respectively; subscripts b and u refer to the bottom or upper curve of the hysteresis loop, respectively, and the subscript r is used if the magnetic flux or field strength increases, otherwise the subscript d is used; for example, the parameter aBur relates to the case when the flux density B is a function of the field strength, u refers to the upper curve of the limiting hysteresis loop, and r is used when the flux density increases; in turn, the parameter aHbd relates to the case when the field strength H depends on the flux density, b refers to the bottom curve of the limiting hysteresis loop, and d is used when the field strength decreases.
Using some analogy to transient states occurring in electrical circuits, where the transient component of a certain quantity decreases and its changes are described by means of an exponential function, the flux density changes of point
P(
H0,
B0) can be described as follows when the field strength
H increases:
where
Bb(
H) is the bottom curve of the limiting hysteresis loop, Δ
Br =
B0 −
Bb(
H0),
H0 and
B0 denote the coordinates of point
P(
H0,
B0), and
kBr is an attenuation coefficient of the transient component when
H increases.
The second component of Equation (1) is a certain pseudotransient component of the changes in flux density. The coefficient kBr(H) affects the ‘dynamics’ at which point P moves to the bottom limiting hysteresis curve. Generally, this coefficient is a nonlinear function of H.
When
H decreases, the difference
Bu(
H0) −
B0 between the flux density value
Bu(
H0) on the upper limiting curve, determined for
H0, and the initial flux density
B0 at point
P should decrease to zero. Therefore, the difference
Bu(
H0) −
B0 can be treated, similarly to previously, as a certain initial value of the transient component of changes in the flux density of point
P moving to the upper limiting curve
Bu(
H). In this case, the change in the flux density
Bd(
H) of point
P can be approximated as follows:
where
Bu(
H) denotes the upper limiting curve, Δ
Bd =
Bu(
H0) −
B0, and
kBd(
H) is an attenuation coefficient of the transient component when
H decreases.
Note that for decreasing values of the field strength H, the difference H-H0 is negative.
To apply this description of hysteresis changes, the limiting hysteresis loop must be measured for a considered electrical sheet. Here, when only the coercive field, residual flux density, and saturation flux density are known, curves of the limiting hysteresis loop can be approximated using, for example, an arctg function which considers the abovementioned parameters.
The coefficients
kBr and
kBd depend on the position of point
P(
H0,
B0). Owing to the nature of the hysteresis phenomenon, the derivative d
Br/d
H on the trajectory of point
P(
H0,
B0) for increasing values of
H is in the range (
aBur,
aBbr), where
aBur describes the value of this derivative when point
P(
H0,
B0) is situated on the upper limiting curve
Bu(
H) (
Figure 1), and
aBbr denotes this derivative when point
P(
H0,
B0) is situated sufficiently close to the bottom hysteresis curve, i.e., to the curve to which it moves when
H increases. Thus,
aBbr is equal to the derivative d
Bb/d
H of the bottom curve at point
Pr (
Figure 1). The value
aBur is determined based on several measured symmetrical hysteresis loops. Denoting the derivative d
Br/d
H, whose value depends on the position of the point
P(
H0,
B0) as
aBr, it can be expressed as follows:
where
dBr =
dB1/(
dB1 +
dB2) (
Figure 1).
If the field strength H increases and the initial position of point P is close to the upper limiting curve Bu(H), then aBr is almost equal to aBur because dBr is close to 0. In turn, when point P is close to the bottom curve Bb(H), dBr tends to 1, and aBr is almost equal to aBbr. This means that point P moves along the bottom limiting curve Bb(H); these are extreme cases resulting from Equation (3).
The dimensionless exponent pB affects changes in aBr, and it should be selected in such a manner that the differences between the calculation results and real transients are the lowest; frequently, this exponent is higher than 1. The exponent pB has higher values when the shape of the hysteresis loop is similar to a rectangle. Note that the exponent pB should have the same value independently on the field strength changes.
To calculate the flux density value
Br(
H) for the next increasing field strength
H, it is necessary to determine the value of the coefficient
kBr based on the flux density
B obtained from the previous solution. Assuming that the coefficient
kBr has a constant value in a sufficiently small neighborhood of the value
H0, then, based on Equation (1), the following relationship can be expressed for
H =
H0:
Because the derivative d
Br(
H0)/d
H, determined for
H0, is equal to
aBr, the coefficient
kBr(
H) is determined using the following expression:
The coefficient aBr for point P(H0,B0) is calculated based on Equation (3), and then the coefficient kBr(H) is determined using Equation (5). The value of this coefficient is inserted into Equation (1), and for the next H, the new flux density Br(H) is calculated.
Denoting the derivative d
Bd/d
H, whose value also depends on the position of the point
P(
H0,
B0), as
aBd (similar to
aBr), it can be written for decreasing field strength as follows:
where
dBd =
dB2/(
dB1 +
dB2),
aBbd is the value of derivative d
Bd/d
H if the point (
H0,
B0) is situated on the bottom limiting curve
Bb(
H), and
aBud is equal to derivative d
Bd/d
H when the point
P(
H0,
B0) is located sufficiently close to the upper hysteresis curve (point
Pd in
Figure 1). For example,
Figure 2 shows the dependencies of the parameters
aBr and
aBd on
H for
B0 = 0 determined for dynamo sheet M530-50A and transformer sheet M120-27S; for this value of
B0, the field strength can change in the range (−
Hc,
Hc). Note that the curves shown in
Figure 2 are similar; however, the ranges of the field strength and flux density changes are different.
Similarly, to calculate the flux density value
Bd(
H), according to Equation (2), for the next decreasing field strength
H, it is necessary to determine the coefficient
kBd based on the flux density
B obtained from the previous solution. Assuming that the coefficient
kBd has a constant value in a sufficiently small neighborhood of the value
H0, then, based on Equation (2), the following relationship can be written for
H =
H0:
The derivative d
Bd(
H0)/d
H, determined for
H0, is equal to
aBd, so the coefficient
kBd(
H) is determined as follows:
The coefficient aBd for point P(H0,B0) is calculated based on Equation (6), and then the coefficient kBd(H) is determined using Equation (8). The value of this coefficient is inserted into Equation (2), and for the next decreasing value H, the new flux density Bd(H) is calculated.
Note that the coefficients kBr and kBd are not selected a priori, but they are numerically determined for the values aBr and ΔBr or aBd and ΔBd determined in the previous calculation step. Before calculations, the value of the exponent pB must be selected; the main criterion is the comparison between calculated minor loops for several ranges of the field strength changes and the corresponding measured loops.
It is worth noting that the parameter
aBbd is equal to parameter
aBur; it significantly simplifies the procedure of parameter determination of the proposed approximation of hysteresis changes. Numerical calculations performed for different electrical sheets and different excitations indicate that satisfactory results are obtained assuming that parameters
aBur and
aBbd are equal to zero; then, Equations (3) and (6) simplify to the following form:
With such a simplification, it is only necessary to determine the value of the parameter pB and to introduce the functions describing the limiting hysteresis loop of a considered electrical steel sheet into the calculation algorithm. It is advantageous when it can be assumed that the coefficients kBr and kBd have constant values for any external excitations; then, the calculation times are shorter, but differences between the measured and approximated flux density values are greater than in the case when these coefficients change their value depending on H.
The distances between point
P and the limiting hysteresis curves are determined for initial point
P(
B0,
H0). Depending on changes in
H,
aBr and
aBd are calculated. Next, the coefficients
kBr or
kBd are determined, and a new value of the flux density
Br or
Bd is calculated. The algorithm for determining changes in flux density is shown in
Figure 3.
The curves of the limiting hysteresis loop (described by appropriate analytical functions or presented by means of array functions) of the considered steel sheet should be introduced into the algorithm. The coefficient aBur (aBbd is equal to aBur) is determined on the basis of several measured minor loops, or these coefficients are assumed to be equal to zero. The parameter pB is selected by comparing several measured loops with approximated curves. Depending on changes in the field strength, the flux density value Br(H) or Bd(H) is determined for the new value of H. Note that the proposed approximation requires determining the limiting hysteresis curves and only two parameters aBur and pB, unlike, e.g., the Jiles–Atherton model for which five parameters must be determined.
3. Approximation of Field Strength Changes
In numerical calculations particularly involving magnetic field distributions in electrical steel sheets, an inverse approximation
H =
f(
B) of the hysteresis loop is frequently applied. In those calculations, the vector potential is an unknown variable in the equation system describing the magnetic field distribution. In this approximation, the bottom limiting hysteresis curve in the approximation
B =
f(
H) becomes the upper limiting curve
Hu =
f(
B), and conversely, the previous upper hysteresis curve becomes the bottom limiting curve
Hb =
f(
B). Any point
P with coordinates (
B0,H0) inside the inverse limiting hysteresis loop will move along a certain trajectory to the bottom or upper limiting curve depending on changes in the flux density
B (
Figure 4). This means that the difference
Hu(
B0)−
H0 between the field strength value
Hu(
B0) (on the upper hysteresis curve) and the initial field strength
H0 at point
P decreases to zero if the flux density
B increases. Similar to approximation
B =
f(
H), the difference
Hu(
B0) −
H0 can be treated as an ‘initial value’ of the certain transient component of changes in the field strength of point
P moving to the upper limiting curve
Hu(
B).
When
B increases, the equation describing field strength changes can have the following form:
where
Hu(
B) is the upper curve of the limiting hysteresis loop (as a function
H =
f(
B)), Δ
Hr =
Hu(
B0) −
H0, and
kHr denotes an attenuation coefficient of a ‘transient’ component when
B increases (
Figure 4). The second component of Equation (10) is a certain pseudotransient component of the changes in field strength.
When
B decreases, the difference
H0 −
Hb(
B0) between the initial field strength
H0 at point
P and the field strength value
Hb(
B0) on the bottom limiting curve
Hb(
B) (determined for
B0) should decrease to zero. Therefore, the field strength
H for decreasing values of
B can be expressed as follows:
where
Hb(
B) is the function describing the lower curve of the limiting hysteresis loop, Δ
Hd =
H0 −
Hb(
B0), and
kHd can be considered an attenuation coefficient of a ‘transient’ component when
B decreases.
Similar to the previous equations, the coefficients kHr and kHd are first dependent on the position of point P(B0,H0). The derivative dHr/dB is in the range (aHur,aHbr) for increasing values of B. The parameter aHur is equal to the value of the derivative dHu(B0)/dB when the initial point P(B0,H0) is located on the upper limiting curve Hu(B), and the parameter aHbr is equal to the derivative dHr(B0)/dB when the point P(B0,H0) is sufficiently close to the bottom curve Hb(B). Similar to the previous derivations, the value of aHbr is determined based on measurements of several symmetric hysteresis loops.
Assuming that
aHr is equal to the derivative d
Hr/d
B, the coefficient
aHr can be expressed as follows:
where
dHr =
dH1/(
dH1 +
dH2) (
Figure 4). Note that in this approach,
H0 −
Hb(
B0) is identically
dH1, and
Hu(
B0) −
H0 is identically
dH2.
If B increases and the initial position of point P is close to the bottom limiting curve Hb(B), then aHr is almost equal to aHbr because dHr is close to 0. In turn, when point P is close to the upper limiting curve Hu(B), then dHr tends to 1 and aHr is almost equal to aHur; then, point P moves along the upper curve Hu(B). The exponent pH in Equation (12) is less than 1, and it should be experimentally determined for a tested electrical steel sheet.
To calculate the field strength Hr(B) for the next increasing flux density B, it is necessary to determine the value of the coefficient kHr based on the value H obtained from the previous solution.
Assuming that
kHr has a constant value in a certain sufficiently small neighborhood of the flux density
B0, then based on Equation (10), the following relationship can be obtained:
The derivative d
Hr(
B0)/d
B is equal to
aHr; thus, the coefficient
kHr can be calculated as follows:
The value aHr for the point P(H0,B0) is determined based on Equation (12), and the next value of the coefficient kHr is calculated using Equation (14). This value is considered in Equation (10), and a new field strength value Hr(B) is calculated for the next value B.
When
B decreases, the coefficient
aHd can be expressed as follows:
where
dHd =
dH2/(
dH1 +
dH2) and
aHbd is equal to the derivative d
Hd/d
B when point
P(
H0,
B0) is located on the bottom limiting curve
Hb(
B).
To calculate the field strength
Hd(
B) for the next decreasing flux density
B, the coefficient
kHd should be determined based on the field strength
H obtained from the previous solution. Assuming that the coefficient
kHd has a constant value in a sufficiently small neighborhood of the value
B0, then, based on Equation (11), the following relationship can be written for
B =
B0:
In this case, the derivative d
Hd(
B0)/d
B is equal to
aHd, so the coefficient
kHd can be determined as follows:
In this approximation, the parameters aHbr and aHud are also equal to each other (similar to the previous approximation); however, they cannot be omitted as in the approximation B = f(H). In practice, they are equal to the reciprocal of the nonzero parameter aBur occurring in Equation (3).
The distances between point
P and the limiting hysteresis curves are calculated for the given position of point
P(
B0,
H0). The coefficients
aHbr and
aHud are determined depending on the flux density changes, and
aHr and
kHr or
aHd and
kHd are calculated. This enables the calculation of a new field strength value
Hr or
Hd. The dependencies of parameters
aHr and
aHd on
B for
H0 = 0 are shown in
Figure 5. Analogous to
Figure 2, the curves shown in
Figure 5 are similar in shape; however, the ranges of changes in both the flux density and field strength are different. The algorithm to determine the field strength changes is similar to that shown in
Figure 6.
Similar to the algorithm concerning the previous approximation, the curves of the limiting hysteresis loop in version H = f(B) should be introduced into this algorithm. As previously said, the coefficient aHbr (aHud is equal to aHbr) is equal to the reciprocal of the nonzero parameter aBur occurring in Equation (3). The parameter pH is determined by comparing several measured loops with approximated curves. Depending on changes in the flux density, the field strength Hr(B) or Hd(B) is determined for the new value B.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}