
Dynamic Stability of Wind Power Flow and Network Frequency for a High Penetration Wind-Based Energy Storage System Using Fuzzy Logic Controller

 ,
, 
Abstract
:
1. Introduction
- Designing of a control scheme to share the power between the networks using a logical algorithm;
- Regulation of the network frequency using a storage system;
- Reduction of the transient time of wind power flow and the fluctuation behavior of frequency using a fuzzy logical controller;
- Storing the surplus wind power and maintaining a high load demand by supplying it into the network;
- Comparing the robustness of the fuzzy logic controller over the PID controller to reduce the fluctuation behavior of frequency in the network.
2. Modeling of Distributed Generation Grid
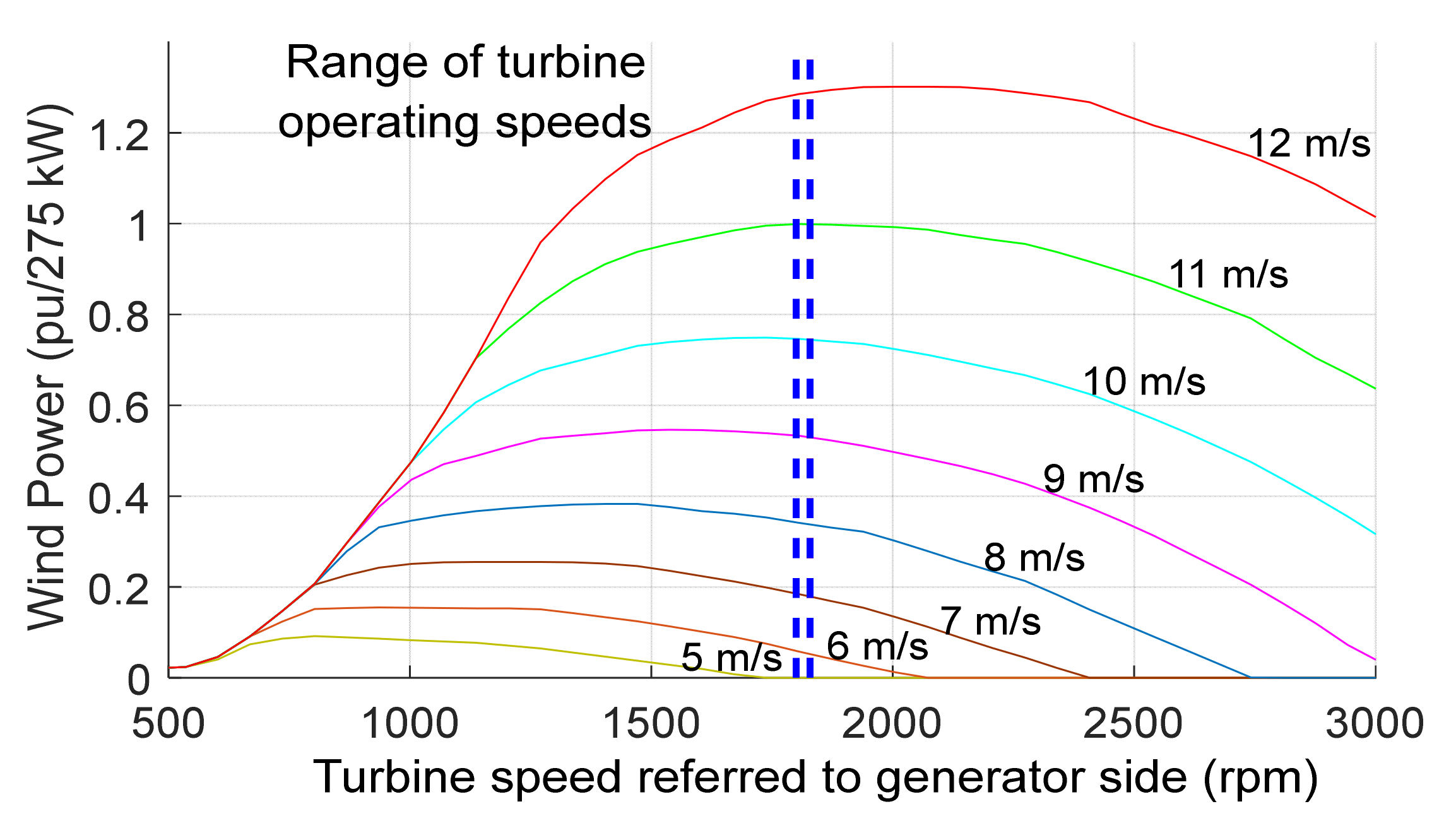
2.1. Wind Turbine
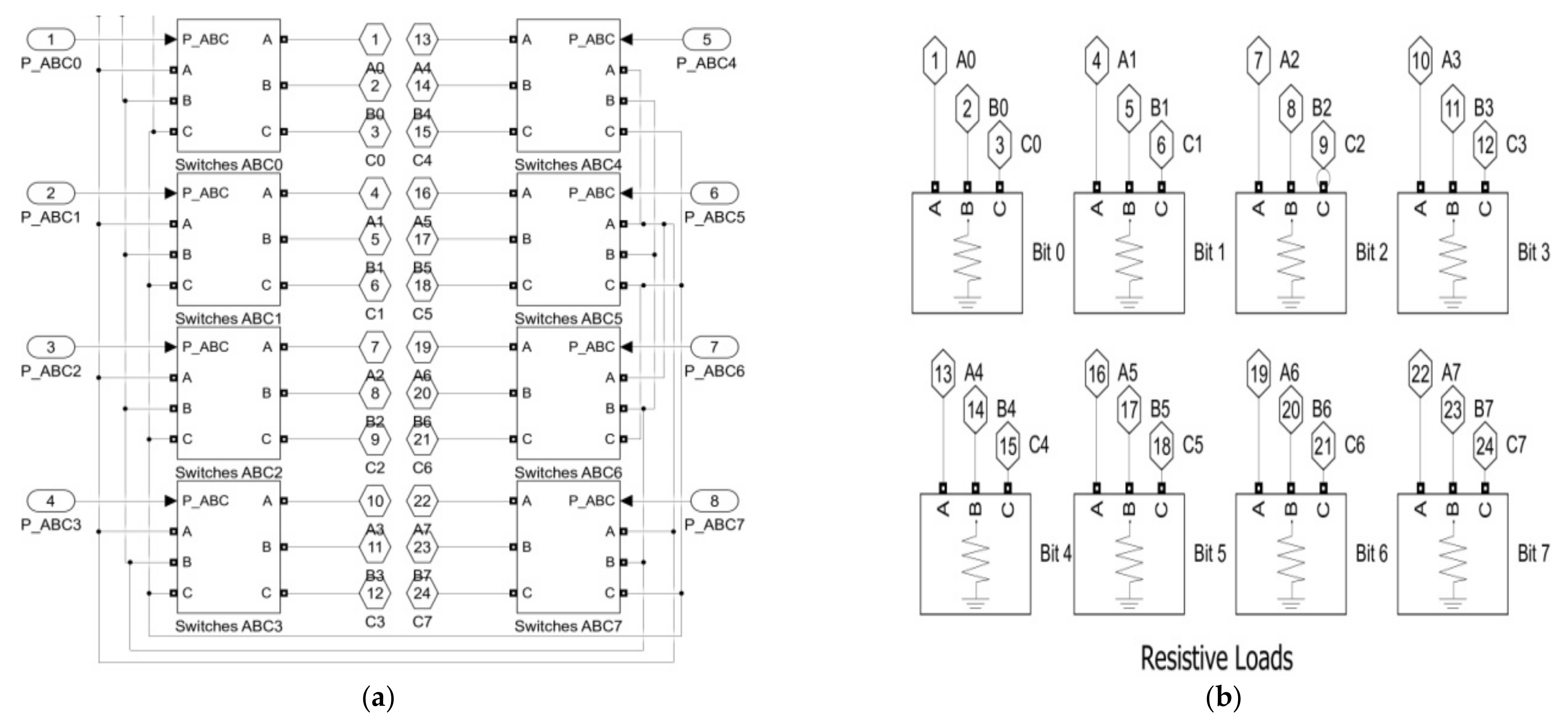
2.2. Secondary/Dump Load System
2.3. Battery-Based Energy Storage System
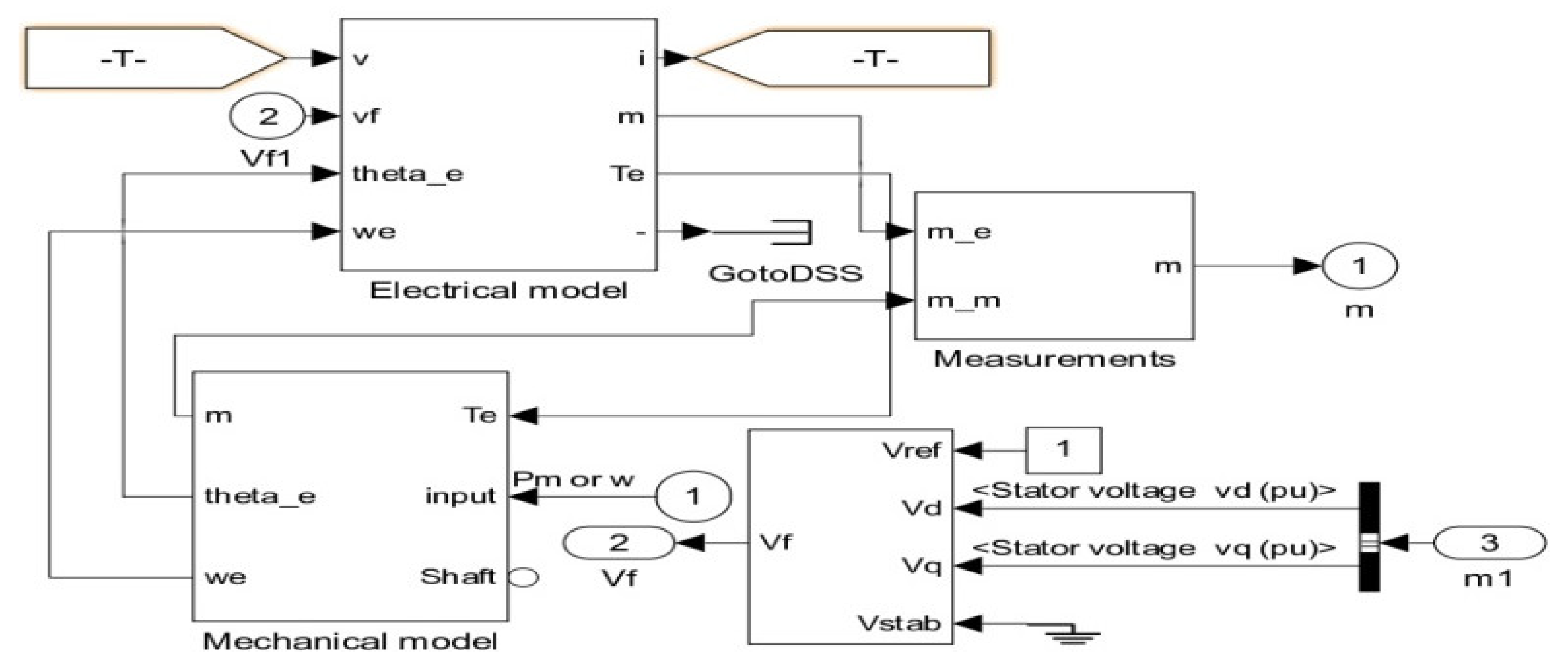
2.4. Synchronous Condenser
3. Control Algorithms for WDHPS
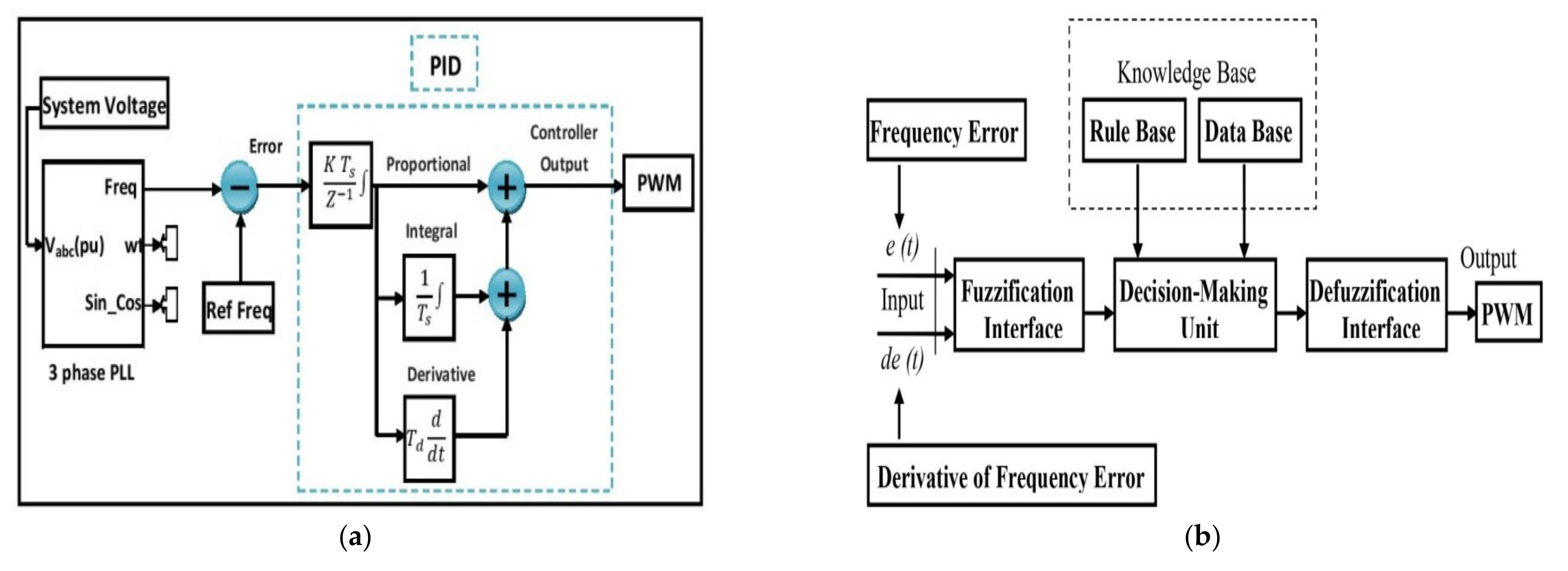
3.1. Control Technique of Frequency in the WDHPS Network
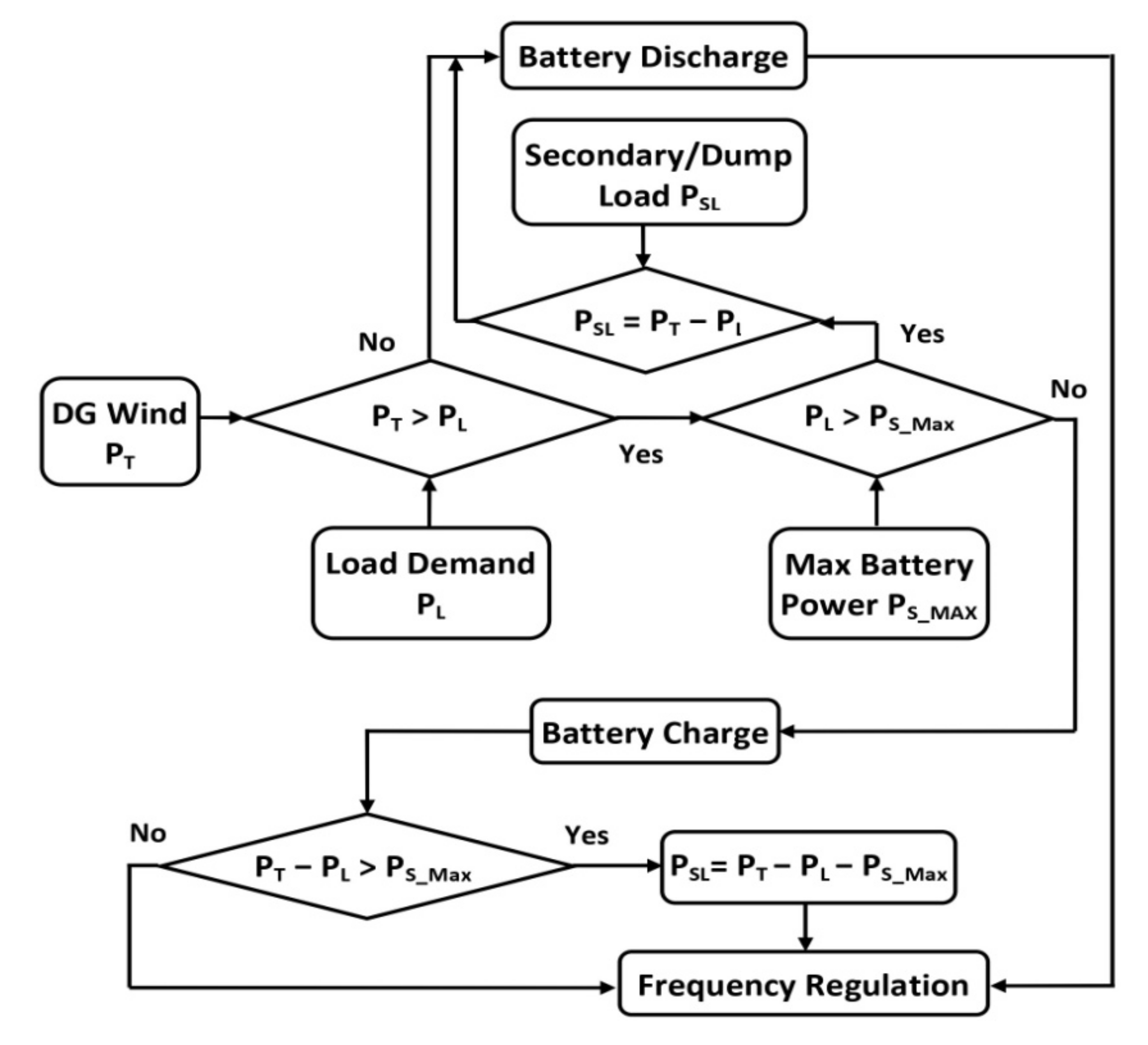
3.2. The BESS Control Strategies
4. Control Techniques Applied to the Network
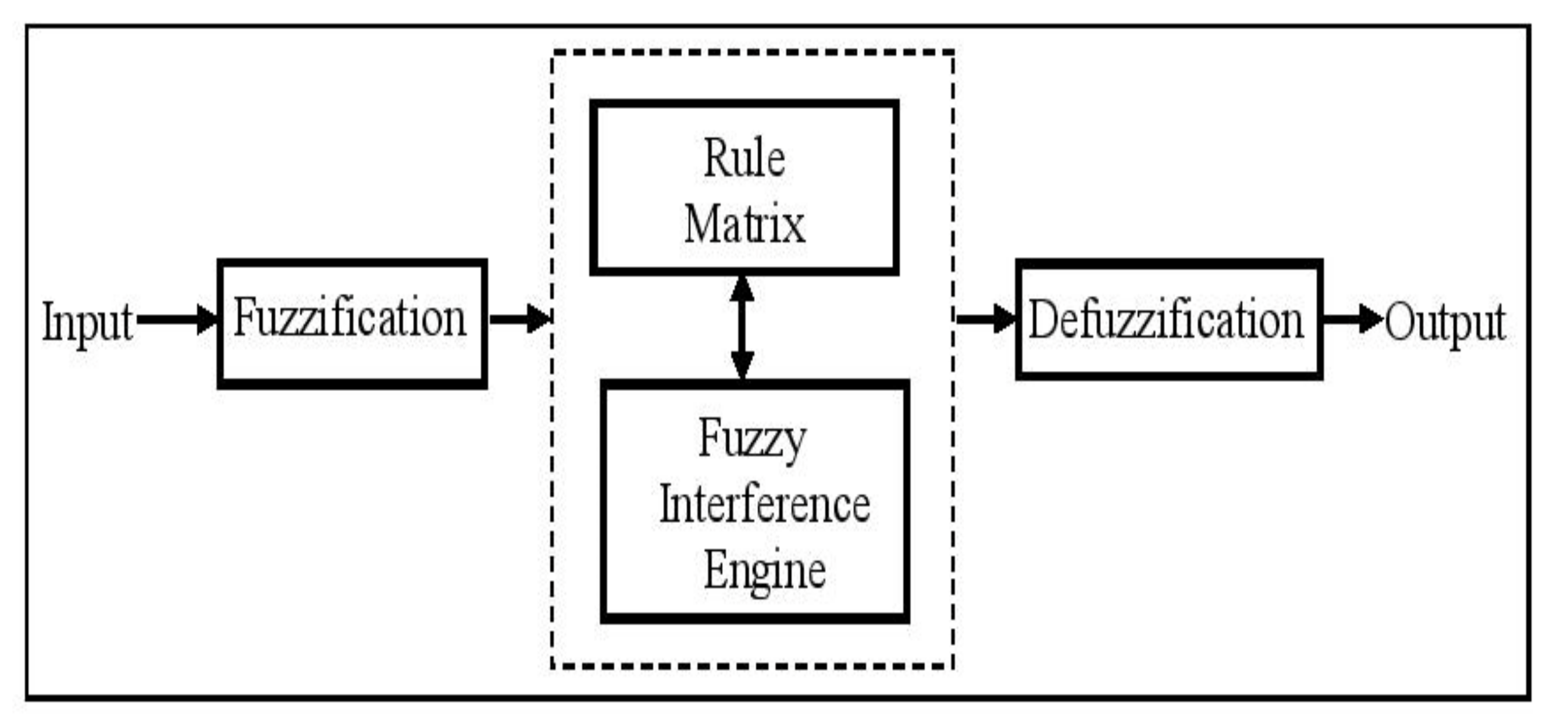
4.1. Fuzzy Logic Control Technique
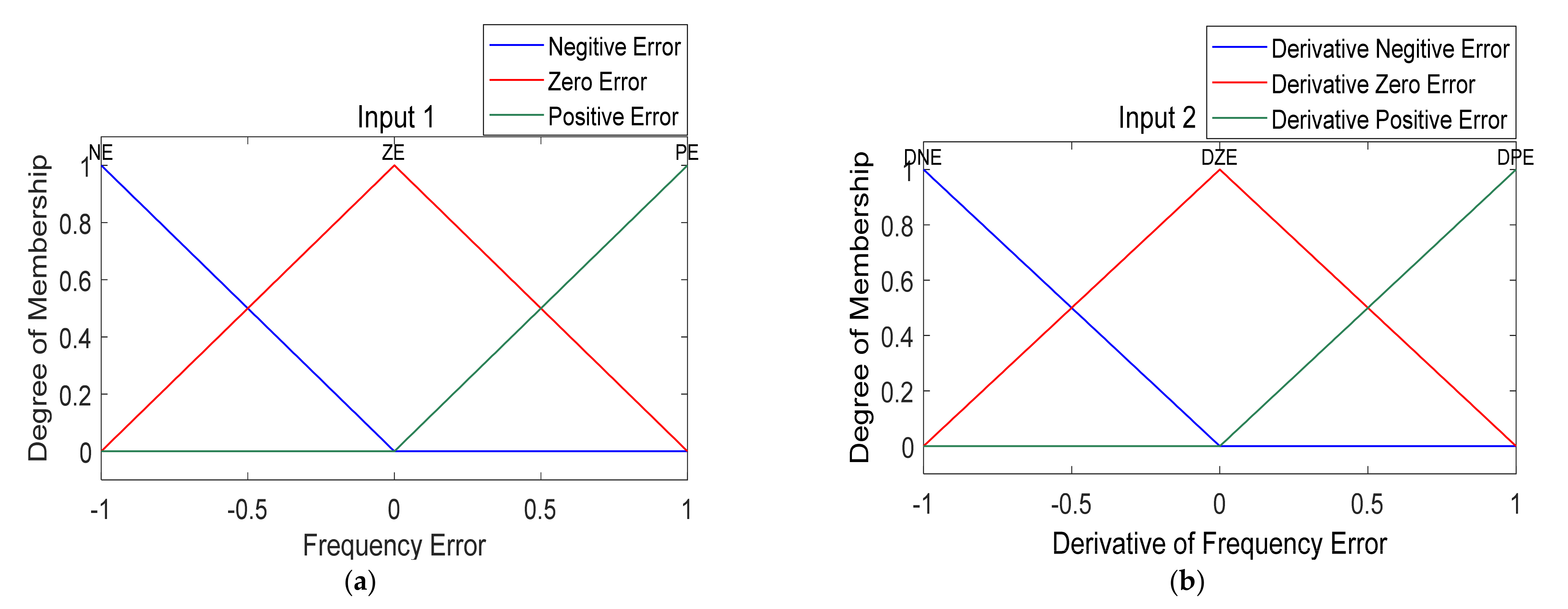
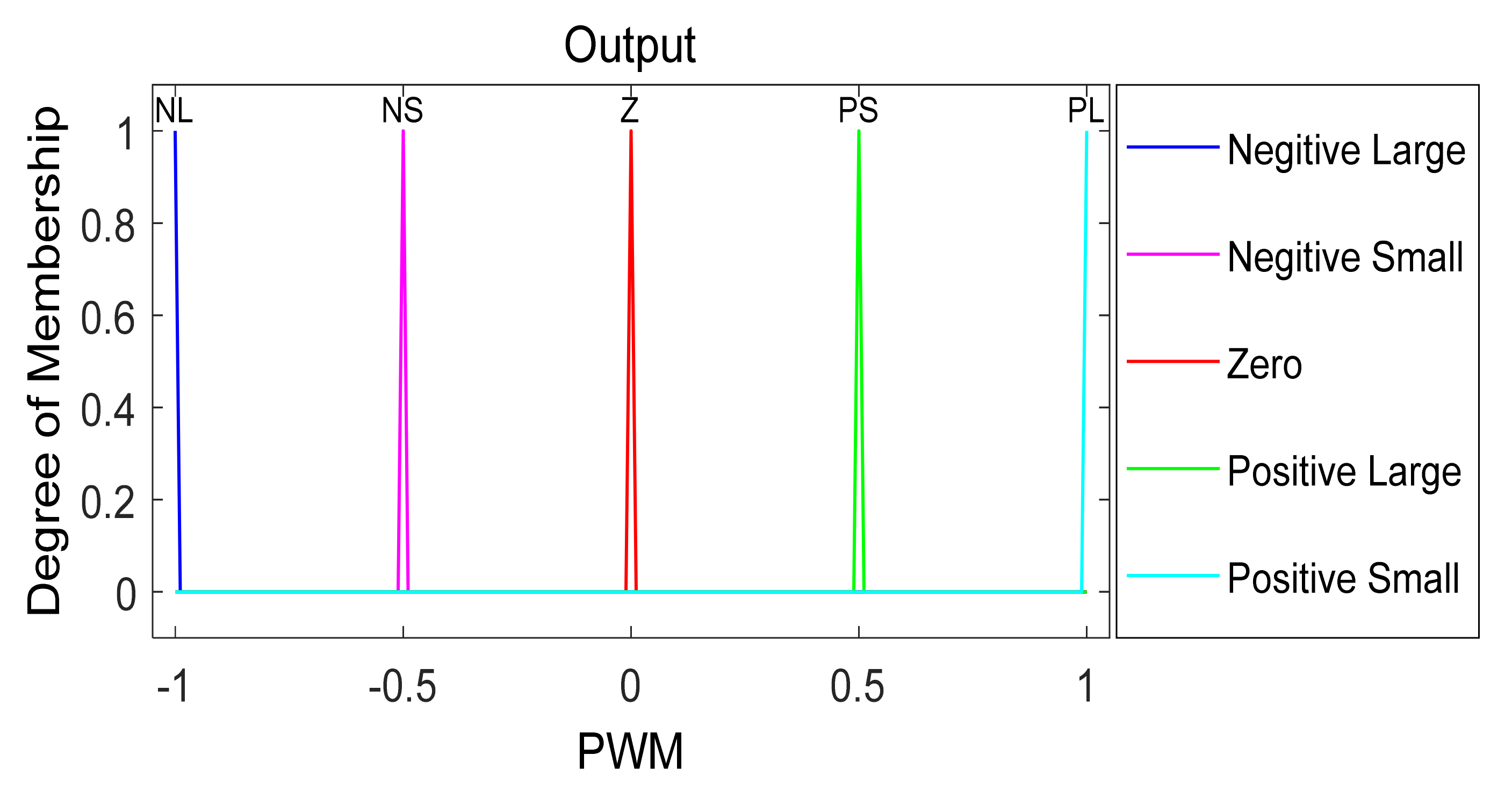
4.2. Operational Principle of MF and Their Rules
- Stage 1: At the beginning of the operation, the input and output of the fuzzy logic controller as well as the dimensions of its variables must be determined. According to the matrix rule, the input signal must be in the ‘IF’ segment and the output signal must be in the ‘THEN’ segment.
- Stage 2: The MF and the fuzzy sets must be defined. Then, the degree of fuzzy MF must connect with all input variables where the output signal is previously identified.
- Stage 3: Here, the fuzzy-interference engine must be described. Then, the rules of the fuzzy logic should be converted to the control rules and regulate the controller with respect to the rules.
- Stage 4: At the end, the defuzzification interface processes the rules and transforms the output values of fuzzy logic to the crisp values.
5. Connection of Wind Turbine with SL and BESS to the Power Network
- Scenario 1: Power produced by a wind turbine (PT) is > overall load demand (PL). In this situation, the BESS (PS) will be charged.
- Scenario 2: Power produced by a wind turbine (PT) is < overall load demand (PL). In this situation, the BESS (PS) will be discharged.
6. Simulation and Result
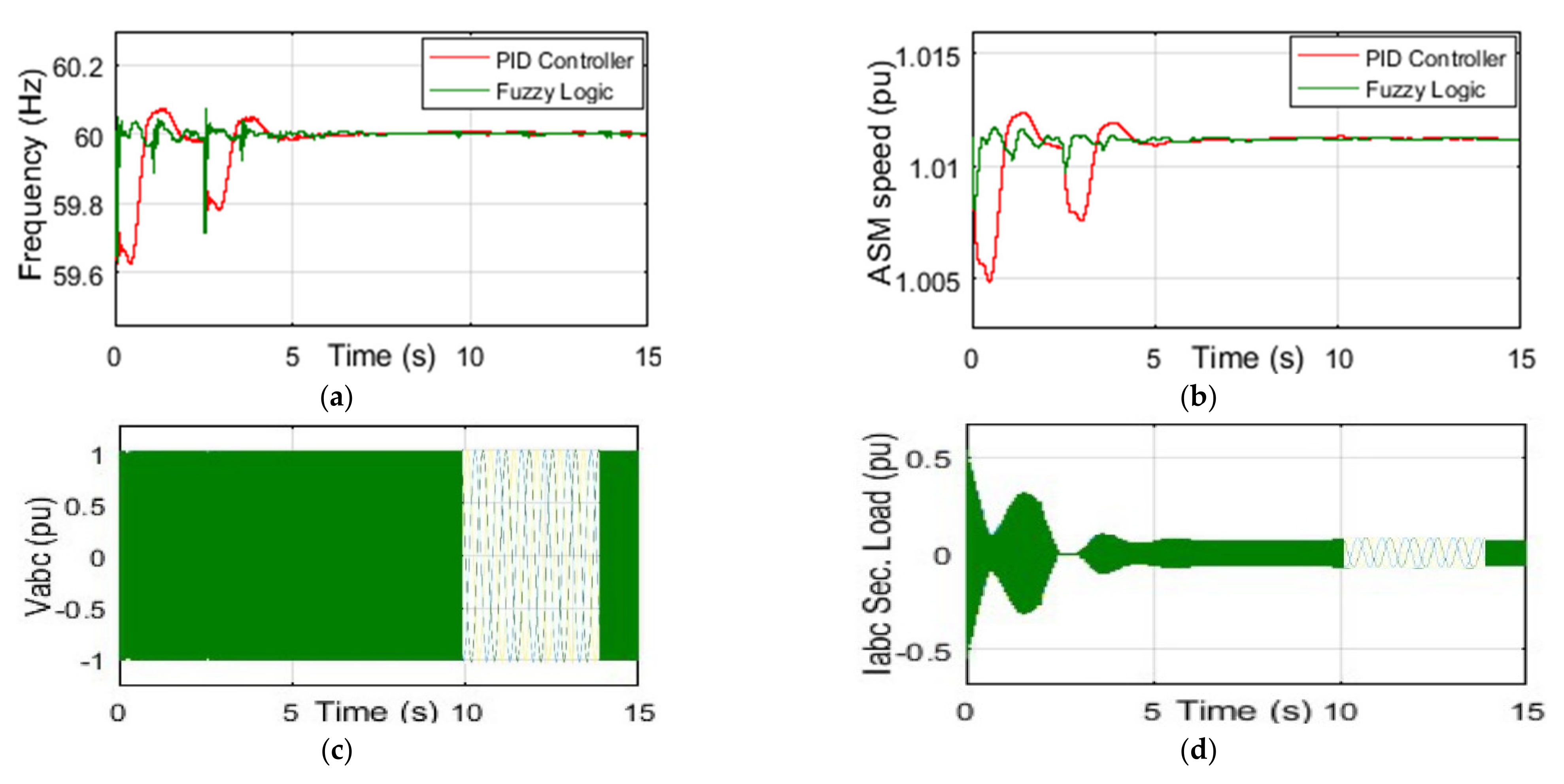
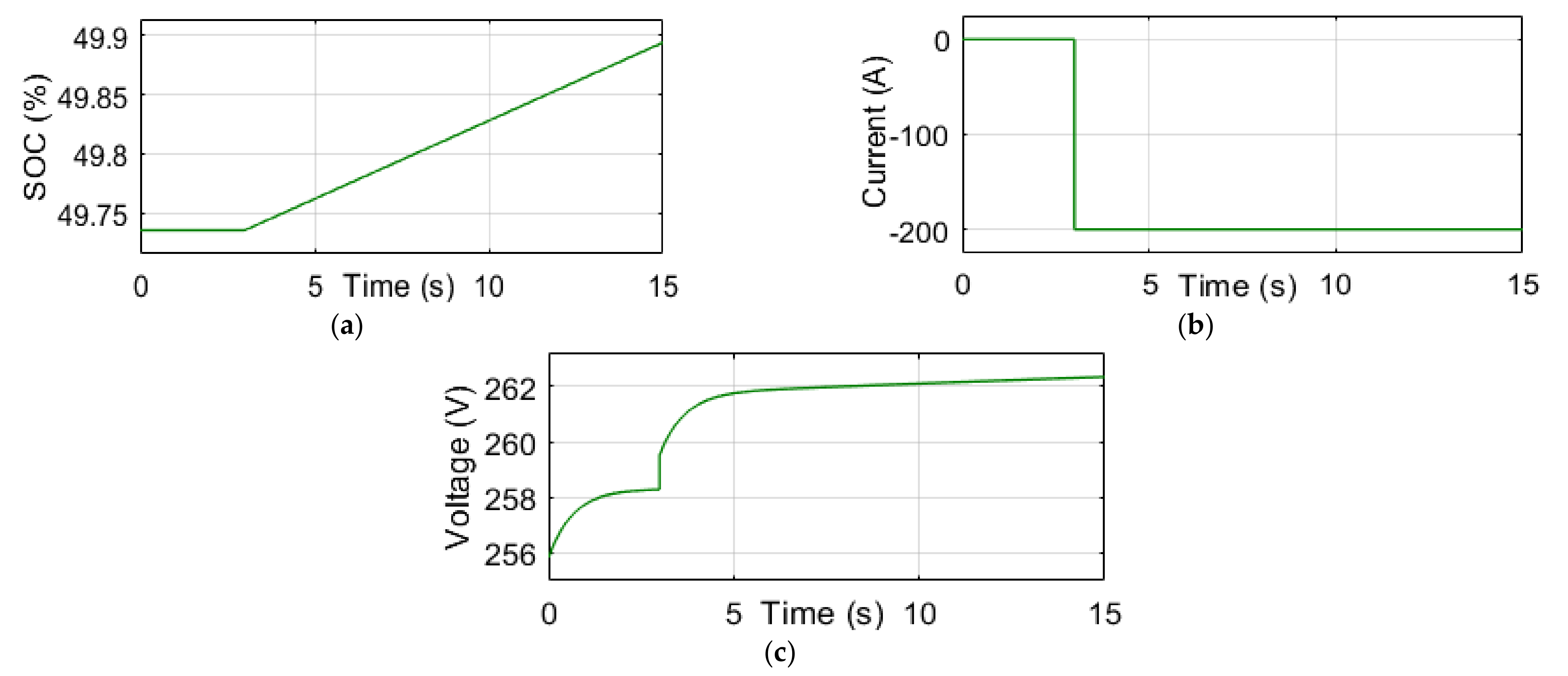
6.1. Power Produced by Wind Turbine (PT) Is > Overall Load Demand (PL). In This Situation, the BESS (PS) Will Be Charged
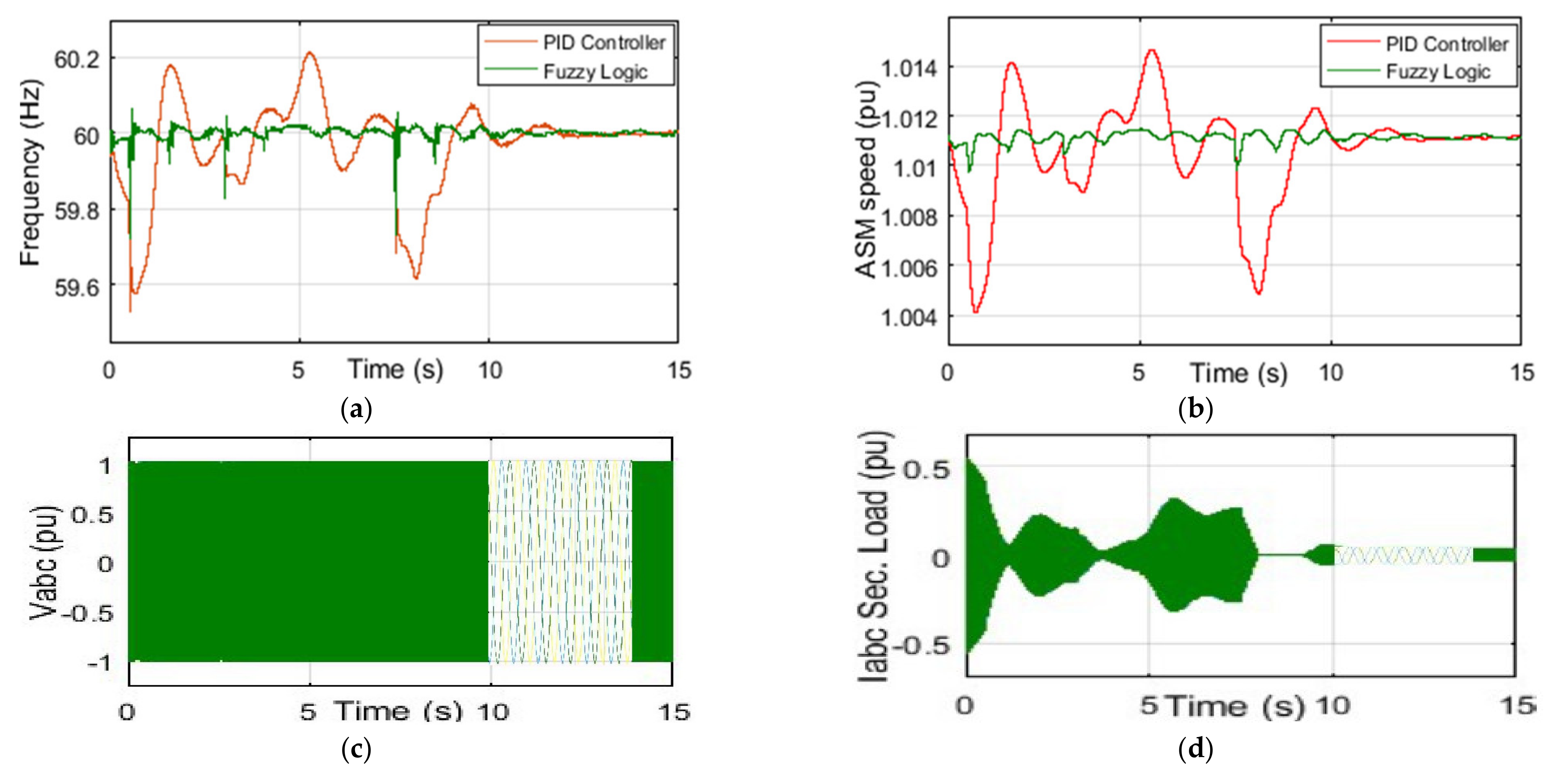
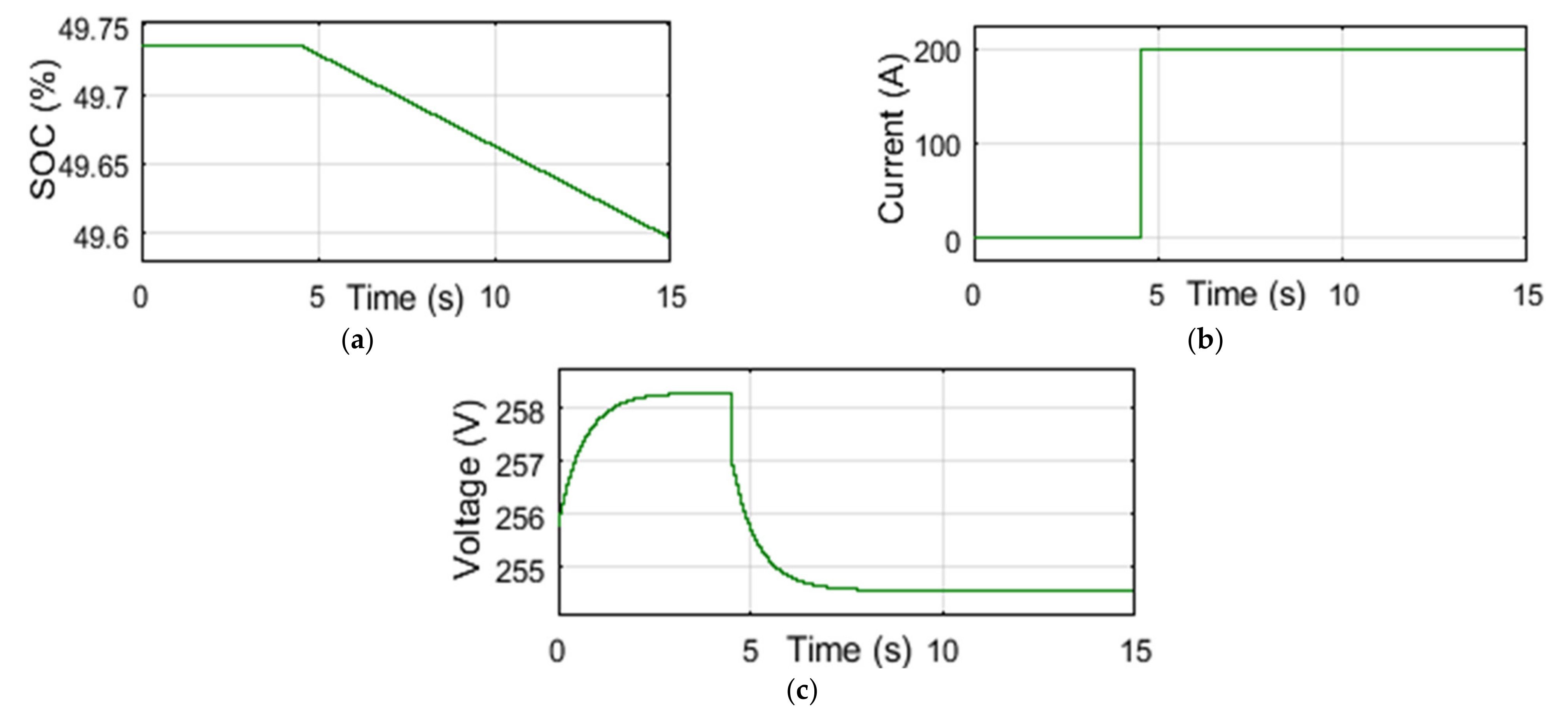
6.2. Power Produced by Wind Turbine (PT) Is < Overall Load Demand (PL). In This Situation, the BESS (PS) Will Be Discharged
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Masson-Delmotte, V.; Zhai, P.; Pörtner, H.O.; Roberts, D.; Skea, J.; Shukla, P.R.; Pirani, A.; Moufouma-Okia, W.; Péan, C.; Pidcock, R.; et al. Global warming of 1.5 °C.An IPCC Special Report on the Impacts of Global Warming of 1.5 °C Above Pre-Industrial Levels and Related Global Greenhouse Gas Emission Pathways, in the Context of Strengthening the Global Response to the Threat of Climate Change, Sustainable Development, and Efforts to Eradicate Poverty; Intergovernmental Panel on Climate Change (IPCC): Geneva, Switzerland, 2017; ISBN 978-92-9169-151-7. [Google Scholar]
- Al-Sakkaf, S.; Kassas, M.; Khalid, M.; Abido, M. An Energy Management System for Residential Autonomous DC Microgrid Using Optimized Fuzzy Logic Controller Considering Economic Dispatch. Energies 2019, 12, 1457. [Google Scholar] [CrossRef] [Green Version]
- Hirsch, A.; Parag, Y.; Guerrero, J. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Kowalczyk, A.; Wlodarczyk, A.; Tarnawski, J. Microgrid Energy Management System. In Proceedings of the 21st International Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 29 August–1 September 2016; pp. 157–162. [Google Scholar]
- Zhang, H.; Davigny, A.; Colas, F.; Poste, Y.; Robyns, B. Fuzzy logic based energy management strategy for commercial buildings integrating photovoltaic and storage systems. Energy Build. 2012, 54, 196–206. [Google Scholar] [CrossRef]
- Chen, Y.-K.; Wu, Y.-C.; Song, C.-C.; Chen, Y.-S. Design and Implementation of Energy Management System With Fuzzy Control for DC Microgrid Systems. IEEE Trans. Power Electron. 2013, 28, 1563–1570. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Power management of an isolated hybrid AC/DC micro-grid with fuzzy control of battery banks. Iet Renew. Power Gener. 2015, 9, 484–493. [Google Scholar] [CrossRef]
- García, P.; Torreglosa, J.P.; Fernández, L.; Jurado, F. Optimal energy management system for stand-alone wind turbine/photovoltaic/hydrogen/battery hybrid system with supervisory control based on fuzzy logic. Int. J. Hydrog. Energy 2013, 38, 14146–14158. [Google Scholar] [CrossRef]
- Kyriakarakos, G.; Dounis, A.; Arvanitis, K.; Papadakis, G. A fuzzy logic energy management system for polygeneration microgrids. Renew. Energy 2012, 41, 315–327. [Google Scholar] [CrossRef]
- Abadlia, I.; Bahi, T.; Bouzeria, H. Energy management strategy based on fuzzy logic for compound RES/ESS used in stand-alone application. Int. J. Hydrog. Energy 2016, 41, 16705–16717. [Google Scholar] [CrossRef]
- Arcos-Aviles, D.; Pascual, J.; Marroyo, L.; Sanchis, P.; Guinjoan, F. Fuzzy Logic-Based Energy Management System Design for Residential Grid-Connected Microgrids. IEEE Trans. Smart Grid 2018, 9, 530–543. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y.-S.; Liu, Y.-H.; Hesse, H.; Naumann, M.; Truong, C.; Jossen, A. A PSO-Optimized Fuzzy Logic Control-Based Charging Method for Individual Household Battery Storage Systems within a Community. Energies 2018, 11, 469. [Google Scholar] [CrossRef] [Green Version]
- Pan, I.; Das, S. Fractional Order Fuzzy Control of Hybrid Power System with Renewable Generation Using Chaotic PSO. ISA Trans. 2016, 62, 19–29. [Google Scholar] [CrossRef] [PubMed]
- Vairavasundaram, I.; Ravi, L.; Vairavasundaram, S.; Varadharajan, V.; Siarry, P.; Uden, L. Multi-objective optimization and energy management in renewable based AC/DC microgrid. Comput. Electr. Eng. 2018, 70, 179–198. [Google Scholar]
- Fossati, J.P.; Galarza, A.; Martín-Villate, A.; Echeverria, J.M.; Fontan, L. Optimal scheduling of a microgrid with a fuzzy logic controlled storage system. Int. J. Electr. Power Energy Syst. 2015, 68, 61–70. [Google Scholar] [CrossRef]
- Choudhury, S.; Bhowmik, P.; Rout, P. Economic load sharing in a D-STATCOM Integrated Islanded Microgrid based on Fuzzy Logic and Seeker Optimization Approach. Sustain. Cities Soc. 2018, 37, 57–69. [Google Scholar] [CrossRef]
- Chaiyatham, T.; Ngamroo, I. A bee colony optimization based-fuzzy logic-pid control design of electrolyzer for microgrid stabilization. Int. J. Innov. Comput. Inf. Control 2012, 8, 6049–6066. [Google Scholar]
- Chaiyatham, T.; Ngamroo, I.; Pothiya, S.; Vachirasricirikul, S. Design of optimal fuzzy logic-PID controller using bee colony optimization for frequency control in an isolated wind-diesel system. In Proceedings of the Transmission & Distribution Conference & Exposition, Asia and Pacific, Seoul, Korea, 26–30 October 2009; pp. 1–4. [Google Scholar]
- Impram, S.; Nese, S.V.; Oral, B. Challenges of renewable energy penetration on power system flexibility: A survey. Energy Strategy Rev. 2020, 31, 100539. [Google Scholar] [CrossRef]
- Nazari, M.; Ilić, M.; Lopes, J. Dynamic stability and control design of modern electric energy systems with large penetration of distributed generators. In Proceedings of the IREP Symposium Bulk Power System Dynamics and Control—VIII (IREP), Rio de Janeiro, Brazil, 1–6 August 2010; pp. 1–7. [Google Scholar]
- Rahman, J. Frequency Control in the Presence of Renewable Energy Sources in the Power Network. Master’s Thesis, École de Technologie Supérieure, Montreal, Canada, 2017. [Google Scholar]
- Rahman, M.J.; Tafticht, T.; Doumbia, M. Frequency Control for a High Penetration Wind-Based Energy Storage System in the Power Network. In Proceedings of the IEEE Electric Power and Energy Conference (EPEC), Kyiv, Ukraine, 9–10 November 2020; pp. 1–6. [Google Scholar]
- Lingamuthu, R.; Mariappan, R. Power flow control of grid connected hybrid renewable energy system using hybrid controller with pumped storage. Int. J. Hydrog. Energy 2019, 44, 3790–3802. [Google Scholar] [CrossRef]
- Zhao, C.; Topcu, U.; Li, N.; Low, S. Design and Stability of Load-Side Primary Frequency Control in Power Systems. IEEE Trans. Autom. Control 2014, 59, 1177–1189. [Google Scholar] [CrossRef] [Green Version]
- Polydoros, C.; Vita, V. Design of an Offshore Wind Farm: Connection to the Main Electrical Grid. In Proceedings of the 11th Engineering Faculty Conference (BulEF), Bourgas, Bulgaria, 3–6 June 2020; pp. 1–6. [Google Scholar]
- Vita, V.; Alimardan, T.; Ekonomou, L. The Impact of Distributed Generation in the Distribution Networks’ Voltage Profile and Energy Losses. In Proceedings of the IEEE European Modelling Symposium (EMS), Madrid, Spain, 6–8 October 2015; pp. 260–265. [Google Scholar]
- Sebastián, R.; Quesada, J. Distributed control system for frequency control in a isolated wind system. Renew. Energy 2006, 31, 285–305. [Google Scholar] [CrossRef]
- Zamee, M.A.; Mitra, D.; Tahhan, S.Y. Load frequency control of interconnected hydro-thermal power system using conventional pi and fuzzy logic controller. Int. J.Energy Power Eng. 2013, 2, 191. [Google Scholar] [CrossRef]
- Amano, H.; Oshiro, Y.; Kawakami, T.; Inoue, T. Utilization of battery energy storage system for load frequency control toward large-scale renewable energy penetration. In Proceedings of the 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Berlin, Germany, 14–17 October 2012; pp. 1–7. [Google Scholar]
- Blaabjerg, F.; Yang, Y.; Yang, D.; Wang, X. Distributed Power-Generation Systems and Protection. Proc. IEEE 2017, 105, 1311–1331. [Google Scholar] [CrossRef] [Green Version]
- Ahshan, R.; Saleh, S.; Al-Badi, A. Performance Analysis of a Dq Power Flow-Based Energy Storage Control System for Microgrid Applications. IEEE Access 2020, 8, 178706–178721. [Google Scholar] [CrossRef]
- Salama, H.S.; Aly, M.M.; Abdel-Akher, M.; Vokony, I. Frequency and voltage control of microgrid with high WECS penetration during wind gusts using superconducting magnetic energy storage. Electr. Eng. 2019, 101, 771–786. [Google Scholar] [CrossRef]
- Wang, Z.; Luo, D.; Li, R.; Zhang, L.; Liu, C.; Tian, X.; Li, Y.; Su, Y.; He, J. Research on the active power coordination control system for wind/photovoltaic/energy storage. In Proceedings of the IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 26–28 November 2017; pp. 1–5. [Google Scholar]
- Syamala, J.; Naidu, I. Load Frequency Control of Multi-AreaPower Systems Using PI, PID, and FuzzyLogic Controlling Techniques. Int. J.Innov. Res.Sci. Eng.Technol. 2014, 3, 128–1288. [Google Scholar]
- Nguyen, T.-T.; Martin, V.; Malmquist, A.; Silva, C. A review on technology maturity of small scale energy storage technologies. Renew. Energy Environ. Sustain. 2017, 2, 36. [Google Scholar] [CrossRef] [Green Version]
- Kouba, N.E.L.Y.; Menaa, M.; Hasni, M.; Boudour, M. Load Frequency Control in multi-area power system based on Fuzzy Logic-PID Controller. In Proceedings of the IEEE International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 17–19 August 2015; pp. 1–6. [Google Scholar]
- Vidyanandan, K.V.; Senroy, N. Primary frequency regulation by deloaded wind turbines using variable droop. In IEEE Trans. Power Syst. 2013, 28, 837–846. [Google Scholar] [CrossRef]
- Bangash, K.N.; Farrag, M.; Osman, A. Investigation of Energy Storage Batteries in Stability Enforcement of Low Inertia Active Distribution Network. Technol. Econ. Smart Grids Sustain. Energy 2019, 4, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Obaid, Z.A.; Cipcigan, L.; Abrahim, L.; Muhssin, M.T. Frequency control of future power systems: Reviewing and evaluating challenges and new control methods. J. Mod. Power Syst. Clean Energy 2019, 7, 9–25. [Google Scholar] [CrossRef]
- Sockeel, N.; Gafford, J.; Papari, B.; Mazzola, M. Virtual Inertia Emulator-Based Model Predictive Control for Grid Frequency Regulation Considering High Penetration of Inverter-Based Energy Storage System. IEEE Trans. Sustain. Energy 2020, 11, 2932–2939. [Google Scholar] [CrossRef]
- Magdy, G.; Mohamed, E.A.; Shabib, G.; Elbaset, A.; Mitani, Y. Microgrid dynamic security considering high penetration of renewable energy. Prot. Control Mod. Power Syst. 2018, 3, 1–11. [Google Scholar] [CrossRef]
- Can, S.D.L.R.D.; Leventis, G.; Phadke, A.; Gopal, A.R. Design of incentive programs for accelerating penetration of energy-efficient appliances. Energy Policy 2014, 72, 56–66. [Google Scholar]
- Zhao, D.; Ma, J.; Qian, M.; Zhu, L.; Yao, L.; Ding, K.; Han, H. Construction of an example system for AC/DC hybrid power grid with high proportion renewable energy. J. Eng. 2019, 16, 1117–1121. [Google Scholar] [CrossRef]
- Mott, L.; Saulnier, B. Commercial Wind-Diesel Project, St. Paul Island, Alaska. In Proceedings of the 14th Prime Power Diesel Inter-Utility Conference, Winnipeg, MB, Canada, 28 May–2 June 2014. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sources | Symbols/Parameters |
|---|---|
| Network | 480 V, 300 kVA Synchronous Generator |
| Turbine | 480 V, 275 kVA Asynchronous Generator; Wind velocity, Vnom = 10 m/s; Wind Power, Pnom = 200 kW; Pitch angle 0° |
| Load Bus | L, load (main) 100 kW, load (Extra) 50 kW, 30 kW, and 45 kW |
| Secondary/Dump Load Bus | SL, vary 0 to 446.25 kW by step of 1.75 kW |
| Synchronous Condenser Bus | SC |
| Wind Turbine Bus | WT |
| Storage System | SS, 240 V, 390 Ah, SOC 50% |
| Transformer | 150 kVA, 120 kV/480 V |
| Number | Fuzzy Logic Rules |
|---|---|
| 1 | If Frequency Error is Negative Error and Derivative of Frequency Error is Negative Derivative Error, Then PWM is Negative Large |
| 2 | If Frequency Error is Negative Error and Derivative of Frequency Error is Zero Derivative Error, Then PWM is Negative Small |
| 3 | If Frequency Negative Error and Derivative of Frequency Error is Positive Derivative Error, Then PWM is Zero |
| 4 | If Frequency Error is Zero Error and Derivative of Frequency Error is Negative Derivative Error, Then PWM is Negative Small |
| 5 | If Frequency Error is Zero Error and Derivative of Frequency Error is Zero Derivative Error, Then PWM is Zero |
| 6 | If Frequency Error is Zero Error and Derivative of Frequency Error is Positive Derivative Error, Then PWM is Positive Small |
| 7 | If Frequency Error is Positive Error and Derivative of Frequency Error is Negative Derivative Error, Then PWM is Zero |
| 8 | If Frequency Error is Positive Error and Derivative of Frequency Error is Zero Derivative Error, Then PWM is Positive Small |
| 9 | If Frequency Error is Positive Error and Derivative of Frequency Error is Positive Derivative Error, Then PWM is Positive Large |
| Frequency Error→ | NE | ZE | PS |
|---|---|---|---|
| Derivative of Frequency Error↓ | |||
| DNE | NL | NS | ZE |
| DZE | NS | ZE | PS |
| DPE | ZE | PS | PL |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.J.; Tafticht, T.; Doumbia, M.L.; Mutombo, N.M.-A. Dynamic Stability of Wind Power Flow and Network Frequency for a High Penetration Wind-Based Energy Storage System Using Fuzzy Logic Controller. Energies 2021, 14, 4111. https://doi.org/10.3390/en14144111
Rahman MJ, Tafticht T, Doumbia ML, Mutombo NM-A. Dynamic Stability of Wind Power Flow and Network Frequency for a High Penetration Wind-Based Energy Storage System Using Fuzzy Logic Controller. Energies. 2021; 14(14):4111. https://doi.org/10.3390/en14144111
Chicago/Turabian StyleRahman, Md Jahidur, Tahar Tafticht, Mamadou Lamine Doumbia, and Ntumba Marc-Alain Mutombo. 2021. "Dynamic Stability of Wind Power Flow and Network Frequency for a High Penetration Wind-Based Energy Storage System Using Fuzzy Logic Controller" Energies 14, no. 14: 4111. https://doi.org/10.3390/en14144111
APA StyleRahman, M. J., Tafticht, T., Doumbia, M. L., & Mutombo, N. M.-A. (2021). Dynamic Stability of Wind Power Flow and Network Frequency for a High Penetration Wind-Based Energy Storage System Using Fuzzy Logic Controller. Energies, 14(14), 4111. https://doi.org/10.3390/en14144111