1. Introduction
Nowadays, the development of wireless sensor nodes (WSN) [
1] has progressed from the implementing wake-up technologies [
2] to the realization of even battery-free WSNs with low energy consumption. Battery-free based WSNs themselves can be supplied either by wireless power transfer (WPT) [
3,
4] or by adopting energy harvesting techniques to collect energy from one or several ambient sources [
5,
6,
7,
8]. However, energy harvesting solutions strongly depend on the availability of the ambient source in a certain environment and requires often a storage element, which help to over bridge periods of low energy availability. On the other hand, WPT systems via inductive link present a sustainable and a reliable solution to power battery-free WSNs devices, which can transfer a relative high-power level and can provide a continuous energy availability. WPT systems are generally composed of two main parts: The primary side presents the charger circuit and includes typically a signal generator, a resonant compensation capacitor, and a transmitting coil [
9]. The secondary side presents the device circuit and includes the receiving coil with a resonance compensation capacitor and a rectifier to charge the device [
9].
The signal generator circuit is often based on inverter circuits [
10] and realizes a relatively low efficiency [
11,
12] because it needs to avoid overheating and therefore operates not at the exact resonance frequency. In addition, they require complex filtering stages to smooth the output voltage waveform and soft-switching topologies based on zero current switching and zero voltage switching to reach an optimized functionality [
11,
12]. As an alternative, AC-AC power amplifier circuits are recommended due to their pure resonance behavior [
13]. In addition, WPT systems often use sensing units in the transmitting side in order to detect the presence of the receiving coil and/or control their working behavior. Various sensing units have been proposed, which can measure current [
14], impedance [
13], or voltage [
15].
To realize a resonant behavior on both sides of the WPT system, compensation capacitors can be connected in series or in parallel to the transmitting and the receiving coils to form one of the four common topologies, which are series–series (SS), series-parallel (SP), parallel–series (PS), and parallel–parallel (PP) [
16,
17]. Each topology offers specific characteristics, such as the sensitivity of the load impedance variation and the intermediate air gap between transmitting and receiving coil. The single-coil WPT systems typically have a simple primary side circuit and can be therefore realized at low costs. However, the sensitivity to misalignment can be reduced by using multiple coils on the primary side. A multi-coil system allows free positioning of the receiver without increasing the energy consumption significantly only if a reduced number of transmitting coils is activated.
MISO IPT systems use several transmitting coils, which can be switched to supply receiver coil in different positions. In [
18,
19], authors give a review on different large area WPT systems with their coils systems, connections and supplies circuits. These systems typically present various primary side electronic architectures to power the used coil such as homogenous systems, associated single-coil WPT systems, and switch-based systems.
Table 1 presents an overview of recent and important multi-coil WPT systems architectures and their characteristics.
Homogenous multi-coil systems simultaneously activate all transmitting coils, which are connected in series to each other [
25,
26,
27]. The used primary side supply circuit is simple and similar to the supply circuit of a single-coil WPT system. It realizes a low power efficiency and is critical for security due to the large surface of the emitted magnetic field.
To overcome these limitations, a multi-input single output wireless power transmission (MISO-WPT) system has been proposed in [
23,
24] consisting of several independent single WPT systems, so that after position detection only one primary side coil is activated. The magnetic field remains focused, but each single-coil WPT system needs an individual primary side supply circuit, which makes the system bulky and costly.
Switch-based MISO-WPT systems was proposed in [
17,
20,
21,
22]. Thereby switches, which are typically transistors or specific relays, are connected in series to each coil on the primary side [
17], [
20,
21,
22,
23]. This reduces the size of the supply circuit relative to the previous solutions. In [
19], a multi-coil system with multiplexed solution is presented with a singular supply circuit. However, the selection of the appropriate coil requires dual MOSFET switches, which presents some similarity to a switch-based multi-coil system. Nevertheless, the control of the multi-coil system switches needs microcontrollers with a high number of pins. For that, in case of a big number of transmitting coils, an FPGA [
22] is proposed as processing unit, leading to an increase of both energy consumption and costs.
In this paper, we investigate the feasibility of a multiplexed circuit on the primary side supply approach, with the aim to reduce the circuit size and to control the system by a simple microcontroller with a limited number of pins. The main objective is to significantly decrease both energy consumption and system costs. To this end, we propose to use receiving coils having the double diameter of the transmitting coils. This is important to cover at least a singular transmitting coil for different possible positions on the top of the pad to power the device for all the possible positions. In order to enable the detection and the powering of even battery-free wireless sensor nodes, we propose that the communication between the transmitting and receiving coil is started from the transmitting side and supplied from the transferred energy on the secondary side.
The paper is organized as follows: In
Section 2, the primary side supply circuit for a system is presented. The description of the proposed multi-coil system control algorithm is detailed in
Section 3. The experimental evaluation of the developed algorithm are reported in
Section 4.
Section 5 shows the analysis of the required time to start the charging process. A conclusion is provided in
Section 6.
2. Design of the Primary Side Multi-Input Single Output Wireless Power Transmission (MISO-WPT) System
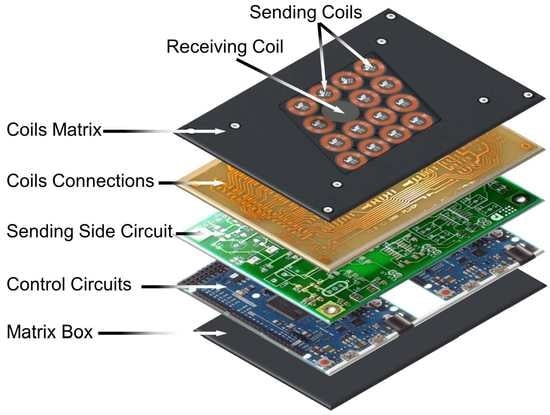
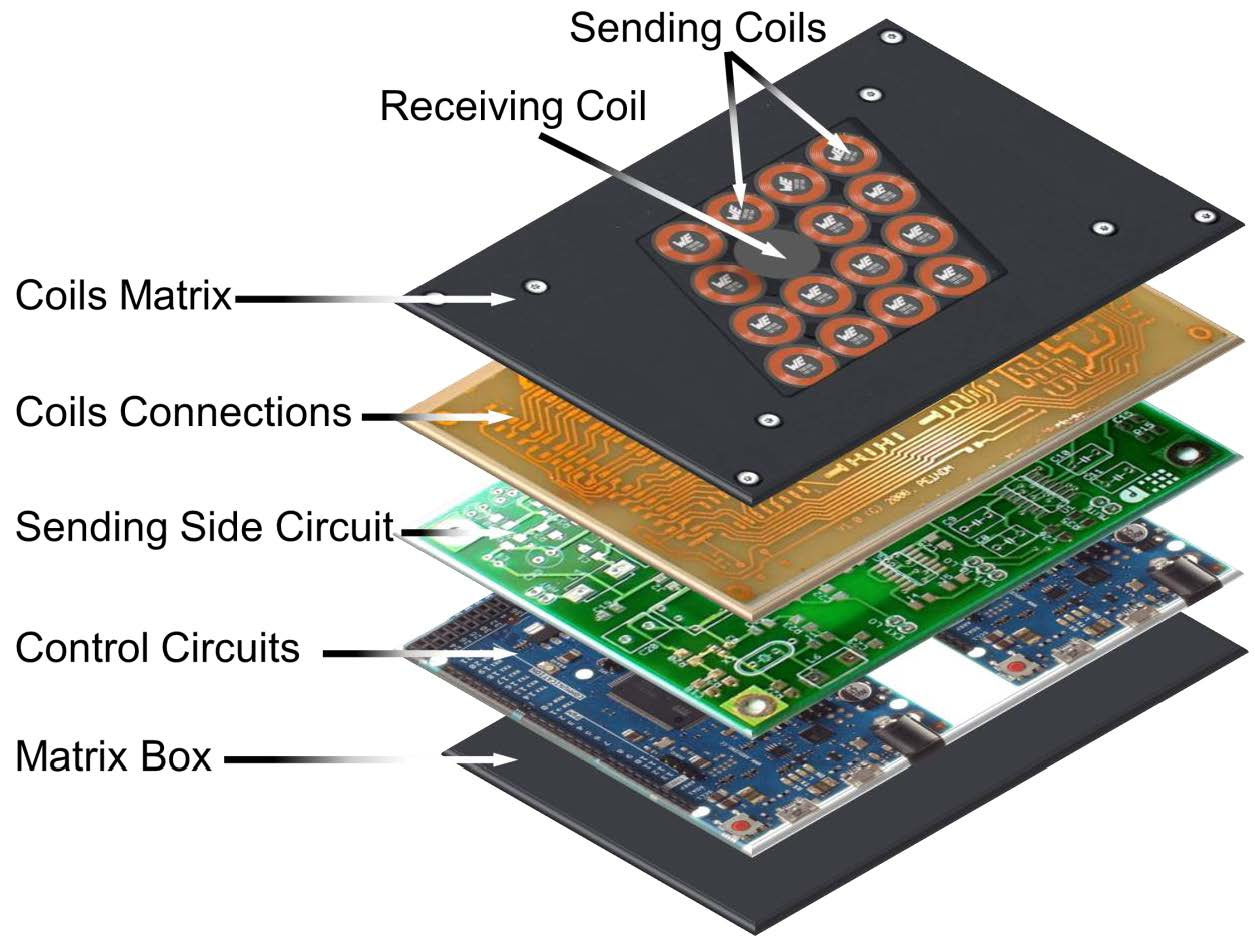
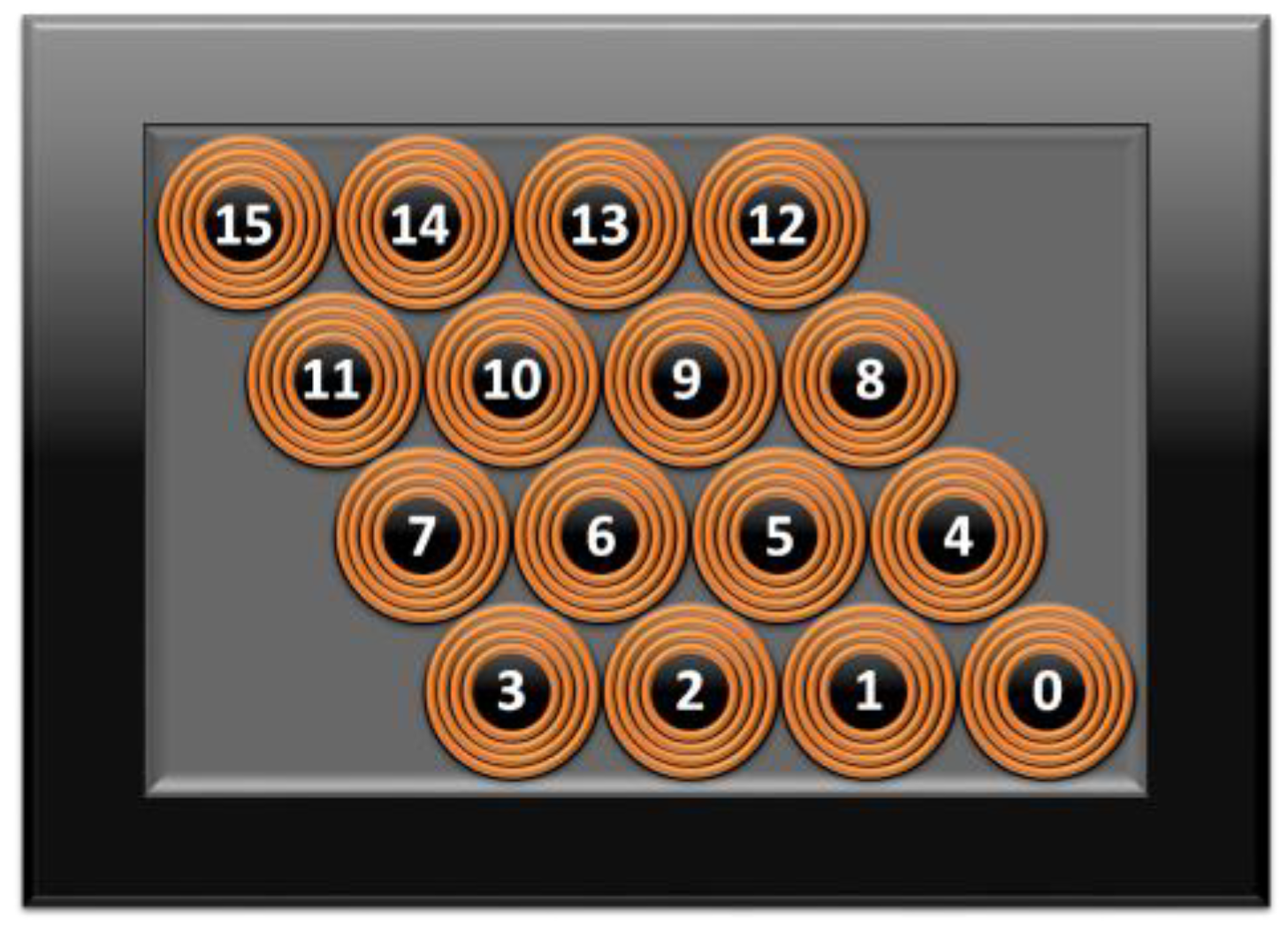
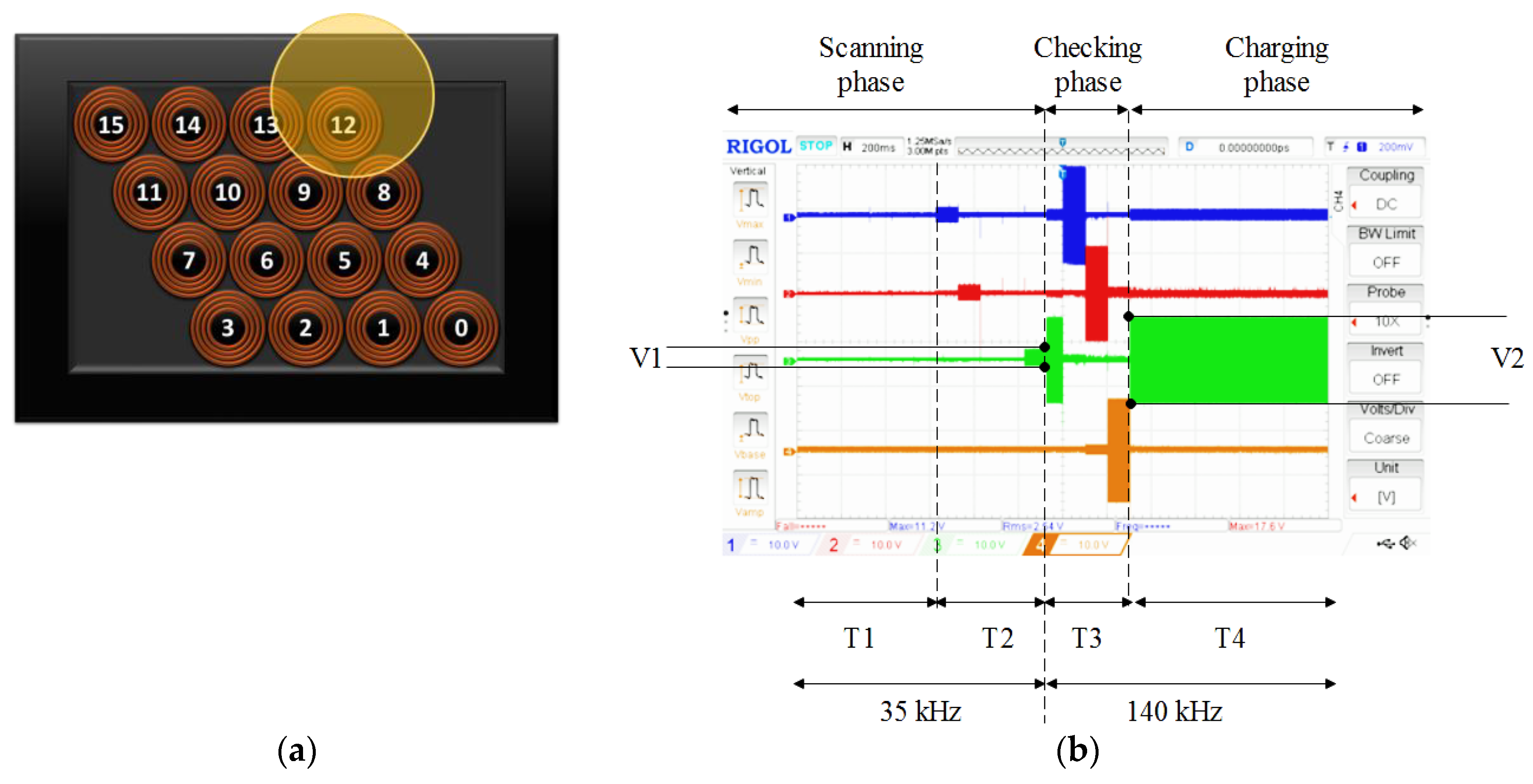
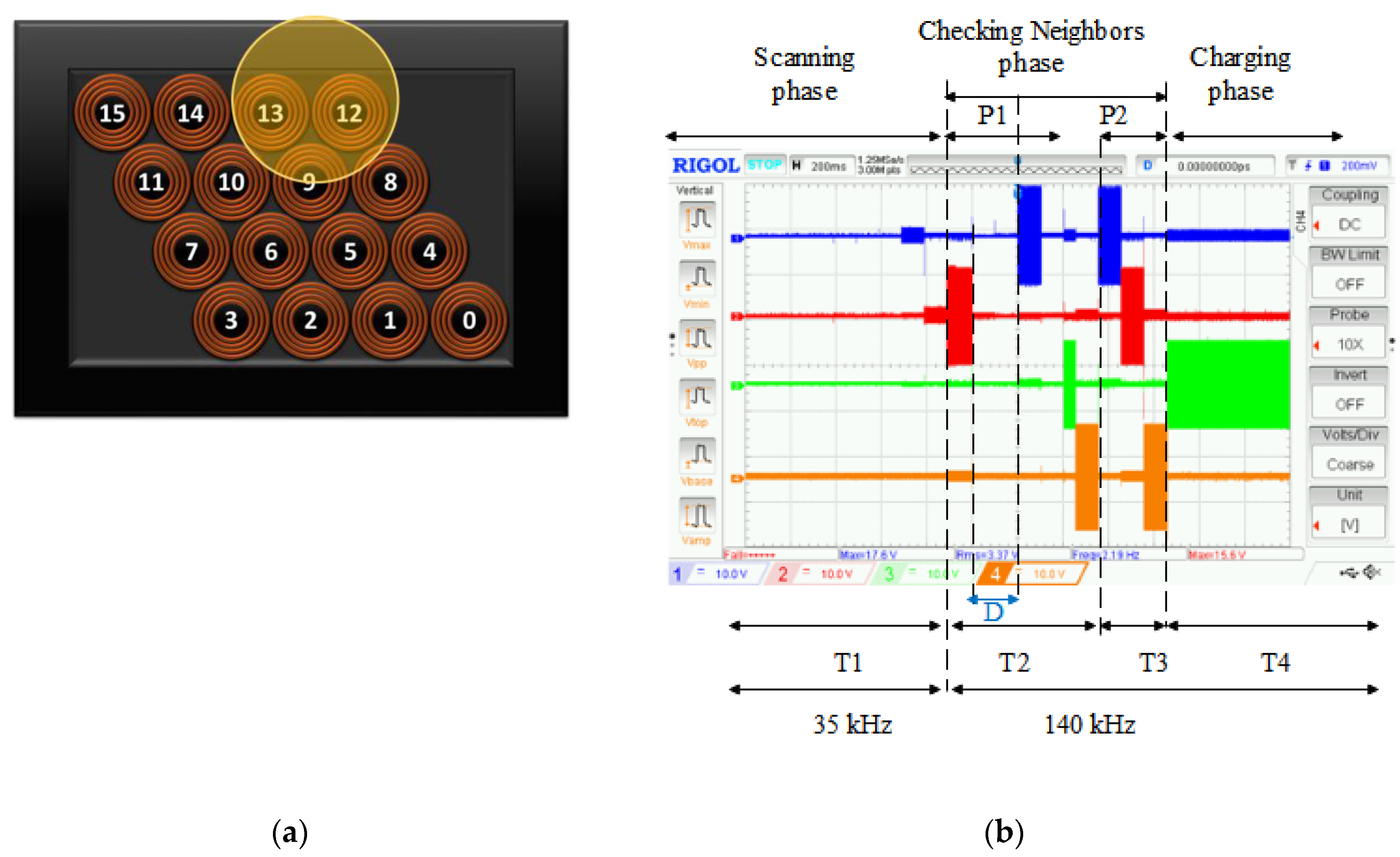
MISO-WPT systems for magnetic induction with a number of transmitting coils exceeding 10 coils present often big challenges due to the limitation on the implementation of the primary side supply circuit. One of the most challenging issues thereby is the size of the electronic circuit, which should be smaller than the size of the MISO-WPT system, especially when the transmitting coils are with a small radius. In addition, the single-layer transmitting coils arranged on multi-array configuration are critical on the activation process with the required amount of power transmission for different possible receiving coil positions within a horizontal distance of 2 mm. For that, a WPT system using 16 transmitting coils is developed with a compact size and a compact supply circuit. The coils are arranged as a parallelogram as shown in
Figure 1, where the transmitting coils are indexed from the coil number 0 (C0) to coil number 15 (C15). The selected geometry is based on previous study in [
26], which compares different configurations. The selected configuration offers a small airgap between the transmitter coils, which increases the transmission efficiency [
26] specifically when the receiving coil diameter is double that of the transmitting one.
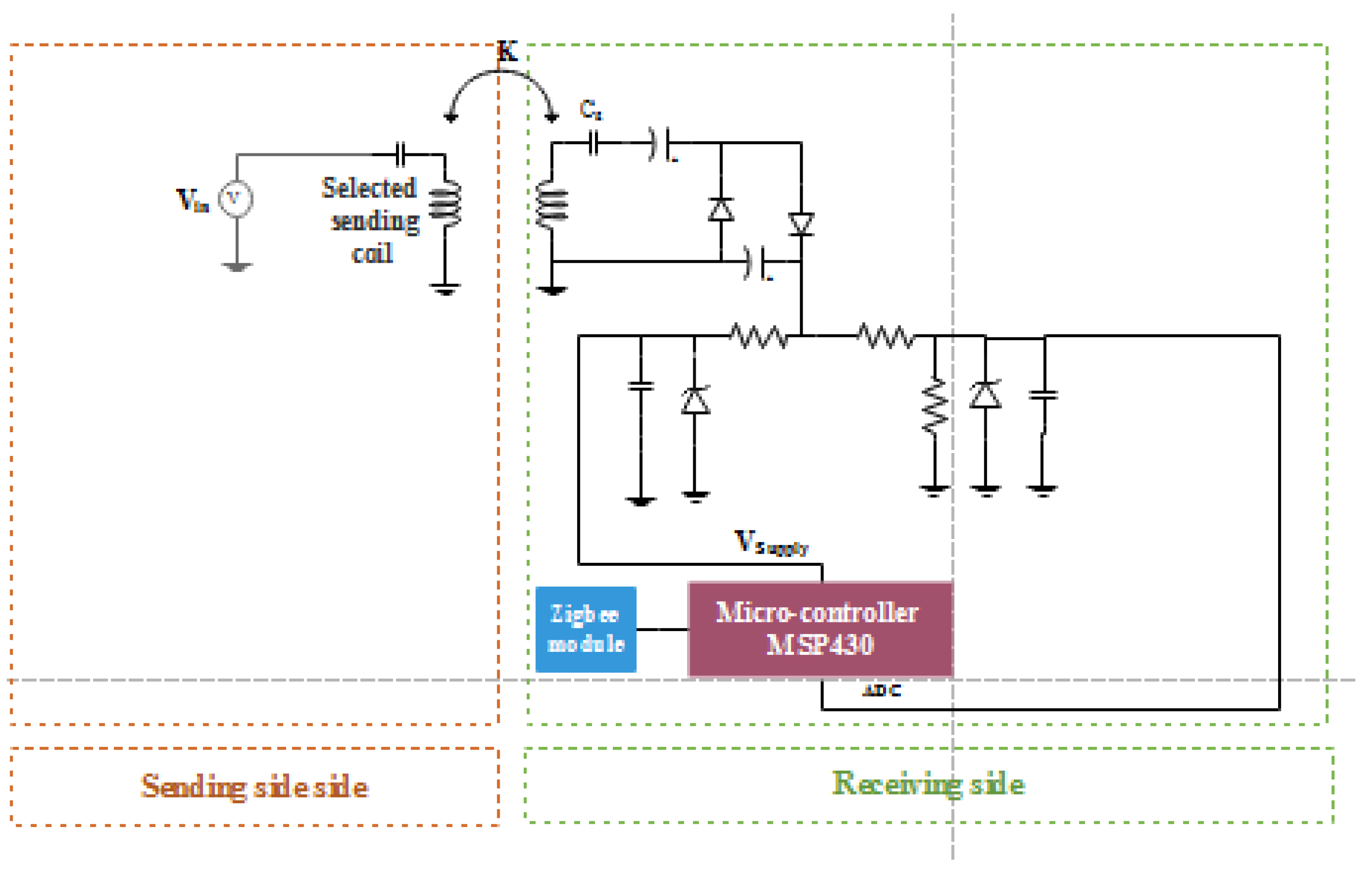
The working principle of the proposed multiplexed supply primary side circuit consists of the activation of transmitting coils one by one. In each coil, the system estimates the presence or the absence of the receiving devices on the top of it. Therefore, a singular supply circuit is used to reduce both circuit size and cost. Typically, using the proposed activation strategy, the system behaves as coil to coil WPT system with a singular transmitting coil and a singular receiving coil. However, the single-coil WPT system is based on the communication between the primary and the secondary sides. For that, generally, a small amount of energy on the secondary side enables the communication between both sides, which is not possible in the case of charging battery-free devices. To address this issue, an additional detector circuit is connected to the primary circuit and a continuous activated primary circuit is required. To reduce the permanently activated circuit that increases the system current consumption, a variation of the working frequency in a large range is highly needed. This solution is complicated in the case of inverter-based supply circuits. To this end, an AC-AC converter is selected as a supply circuit for the proposed multi-coil WPT system.
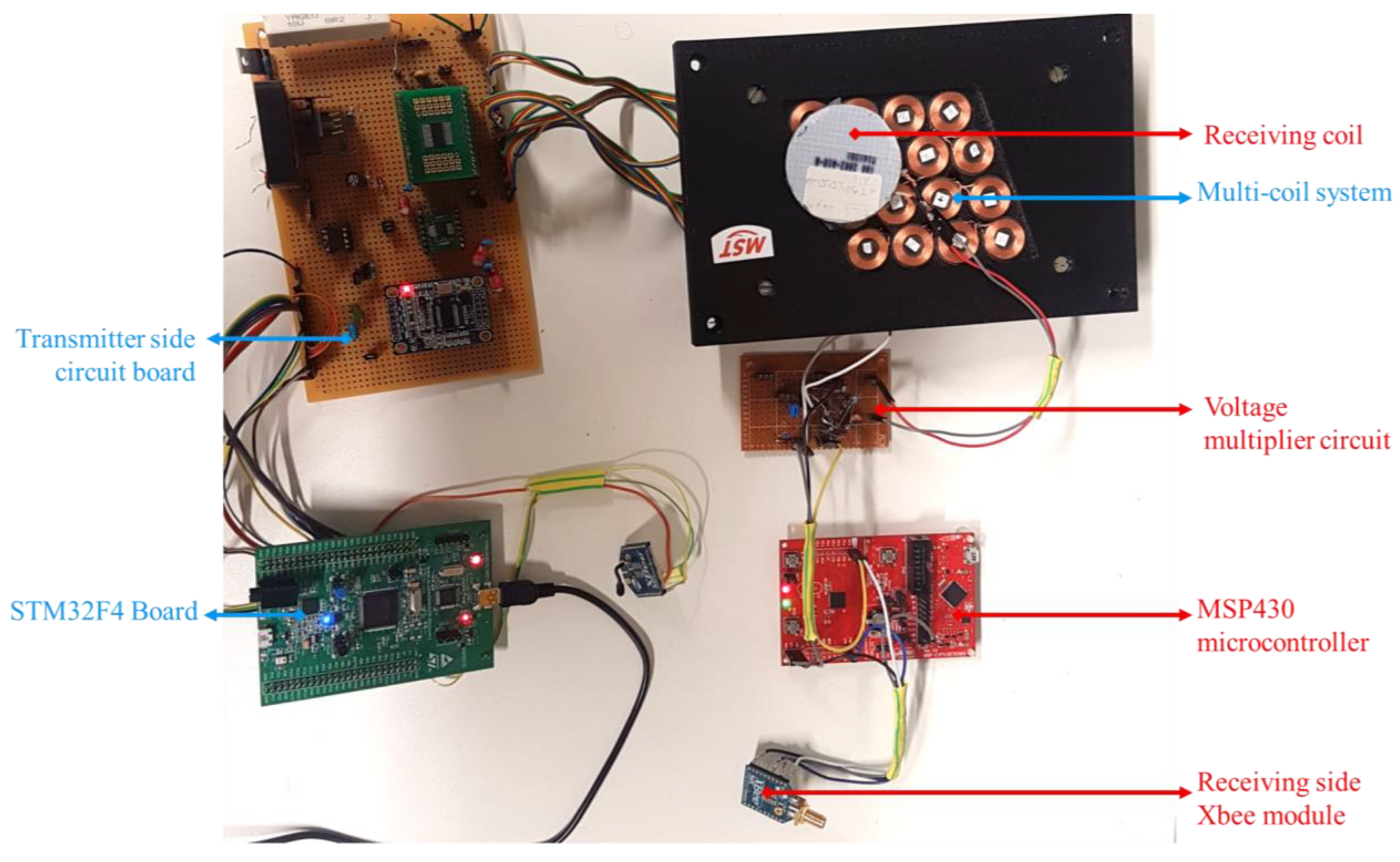
Figure 2 illustrates the proposed primary side electronic circuit. It is based on a single oscillator, a voltage amplifier circuit, a current feedback amplifier, a compensation capacitor, multiplexers, a passive voltage peak detector, a ZigBee communication module, and a microcontroller board. Indeed, multiplexers are used to switch-on the appropriate transmitting coil.
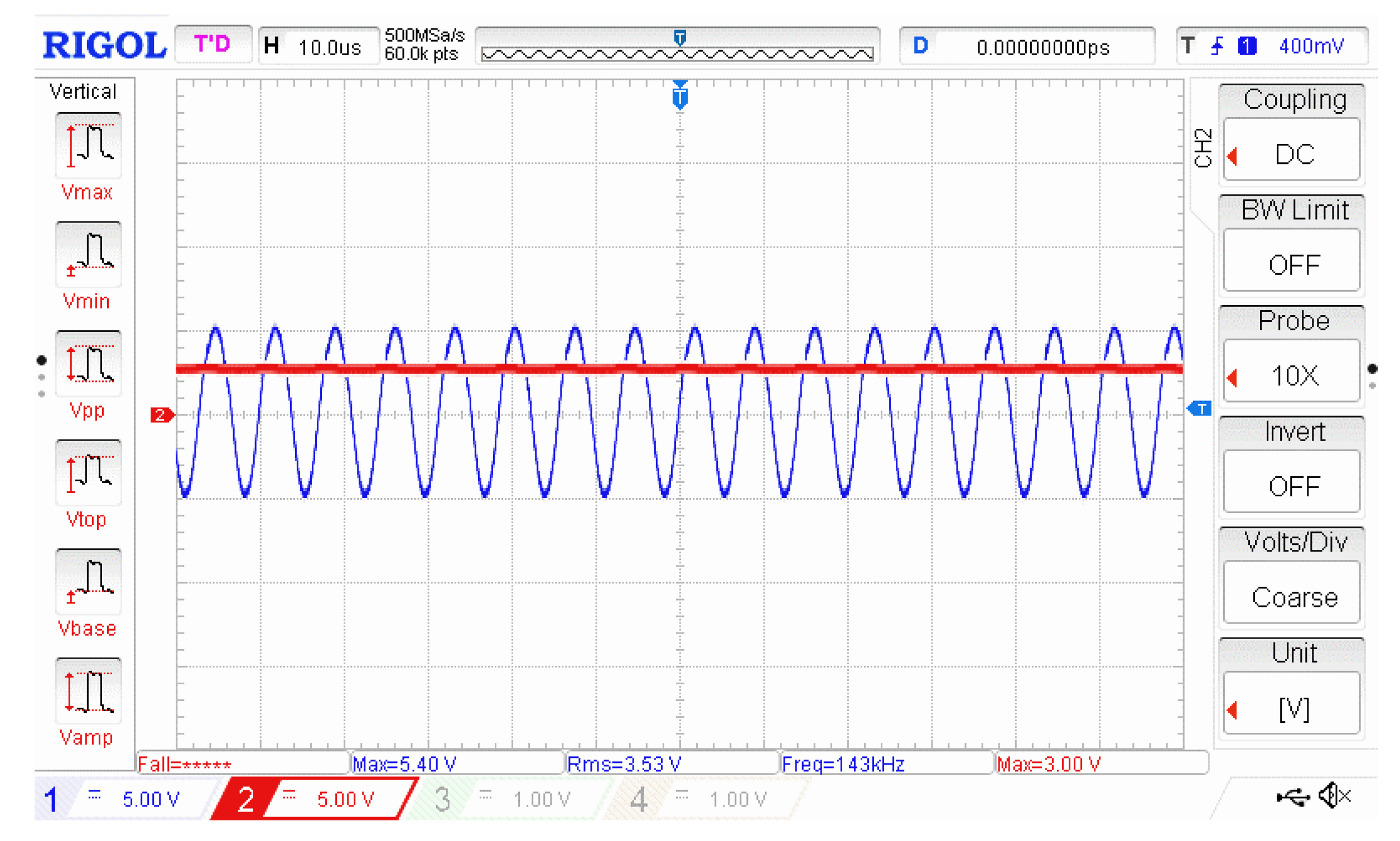
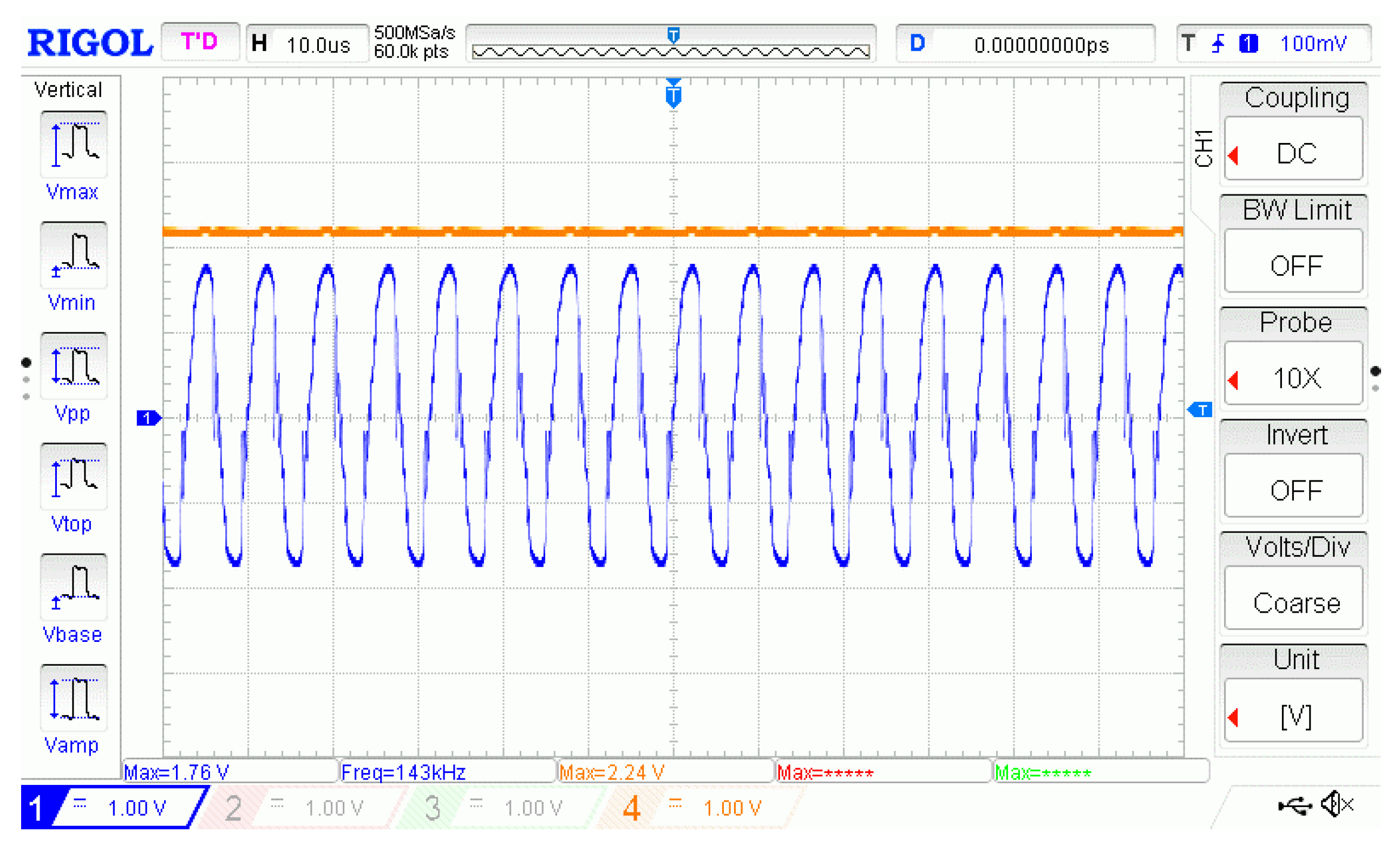
The passive peak detector circuit is used in the primary side to detect the presence of the receiver device even without communication with the secondary side. Their working principle is based on the detection of the reflected power [
26] (see Equation (1)) due to the presence of the receiver coil (L
2) behind it, which can vary the selected transmitting coil voltage (V
L1c) [
17] as presented in Equation (2). In Equation (2), the select coil self-inductance is L
1 where the transmitting coil voltage and current are
Vs and
Is, respectively.
Ceq2 presents the series compensation capacitor in the receiving side. Therefore, the proposed primary side circuit is a low power consumption device since it uses passive components including simple diode, smoothing capacitor (C) and resistors (
Rsmooth) (see
Figure 2). To select the values of the smoothing capacitor and the associated resistor, Equations (3) and (4) are used.
In the following analytical equations (Equations (1)–(4)) are presented in order to describe the passive peak detector principle.
As seen in
Figure 2, the detector is connected to the compensation capacitor output and the common pin of the multiplexers to measure the selected transmitting coil voltage variation.
The selection of the multiplexer is critical due to the required high frequency of switching, and the used AC signals amplitude and current. An ADG1406 multiplexer with 1:16 channels characterized by a high switching frequency, a supply voltage of ±15 V, high switching frequency and a continuous current up to 180 mA is used. For that, to support the coil current, parallel multiplexers are used. The singular multiplexer channel is connected to the output pin of the primary side compensation capacitor, where the other channels are connected each to the transmitting coil. The activation and deactivation of transmitting coils are based on the five multiplexer control pins (A0, A1, A2, A3, and A4). The switch-on of a transmitting coil depends on a specific functionality combination of the multiplexer control pins as presented in
Table 2. In the implementation, the control pins of both parallel multiplexers are connected in parallel, which reduces the number of the used micro-controller pins.
The proposed AC-AC amplifier is based on an oscillator connected to amplifier stages. For that, a direct digital synthesizer (DDS) generates a voltage amplitude Vin = 1 Vpp with an offset of 0.5 V is implemented. A high pass filter (capacitor and resistor) is connected to the DDS output to remove the signal offset. To increase the obtained power, a voltage and current amplifier are used to supply the MISO-WPT with appropriate voltage and current levels.
The voltage amplifier circuit is based on an AD817 op-amp to provide an adequate voltage amplitude (
V2) to be doubled amplified (
Vs) by the current feedback amplifier (LT1210). Both amplifiers are connected to a non-inverter architecture (see
Figure 2), where the output voltages for each stage are presented, respectively, in Equations (5) and (6). The current amplifier voltage output (
Vs) according to the DDS voltage (
Vin) is presented in Equation (7). In the output of the current feedback amplifier, a resistance (
R), a compensation capacitor (
Ceq1), and the selected transmitting coil (
L1c) are connected in series. The resonance compensation capacitors on the resonant frequency of 140 kHz of both sides are obtained based on Equation (8). The current (
Is) generated by the proposed supply circuit depends on the generated voltage level and the connected load value as shown in Equation (9), which is maximal in the case of pure resonance. In the following analytical equations (Equations (5)–(9)) are presented in order to describe the amplifier circuit design principle and the generated supply current.
The developed circuit gives more freedom on smooth frequency variation on a large range from a few kHz to several MHz. In addition, the pure sine wave voltage and current are generated by the AC-AC amplification stage. These advantages are challenging in case of a supply circuit based on DC-AC inverters.
In fact, the proposed circuit offers several advantages especially in term of size and cost. To design 16 MISO-WPT system with homogenous architectures, a supply circuit delivering 16 times voltage than single-coil WPT system is required, which increases the system power consumption and reduces efficiency. However, in case of for switch-based multi-coil WPT, generally 32 MOSFET switches or 16 relays are required to activate the valid transmitter coil. In addition, at least, 16 microcontroller pins are used. In the proposed circuit, only two switches chips controlled by only 5 microcontroller pins are connected to supply circuit of the 16 multi-coil WPT. In addition, commercial coils with ferrite shield are used, which offers high quality factors and standardized performance.
3. Control Algorithm for Low Current Consumption
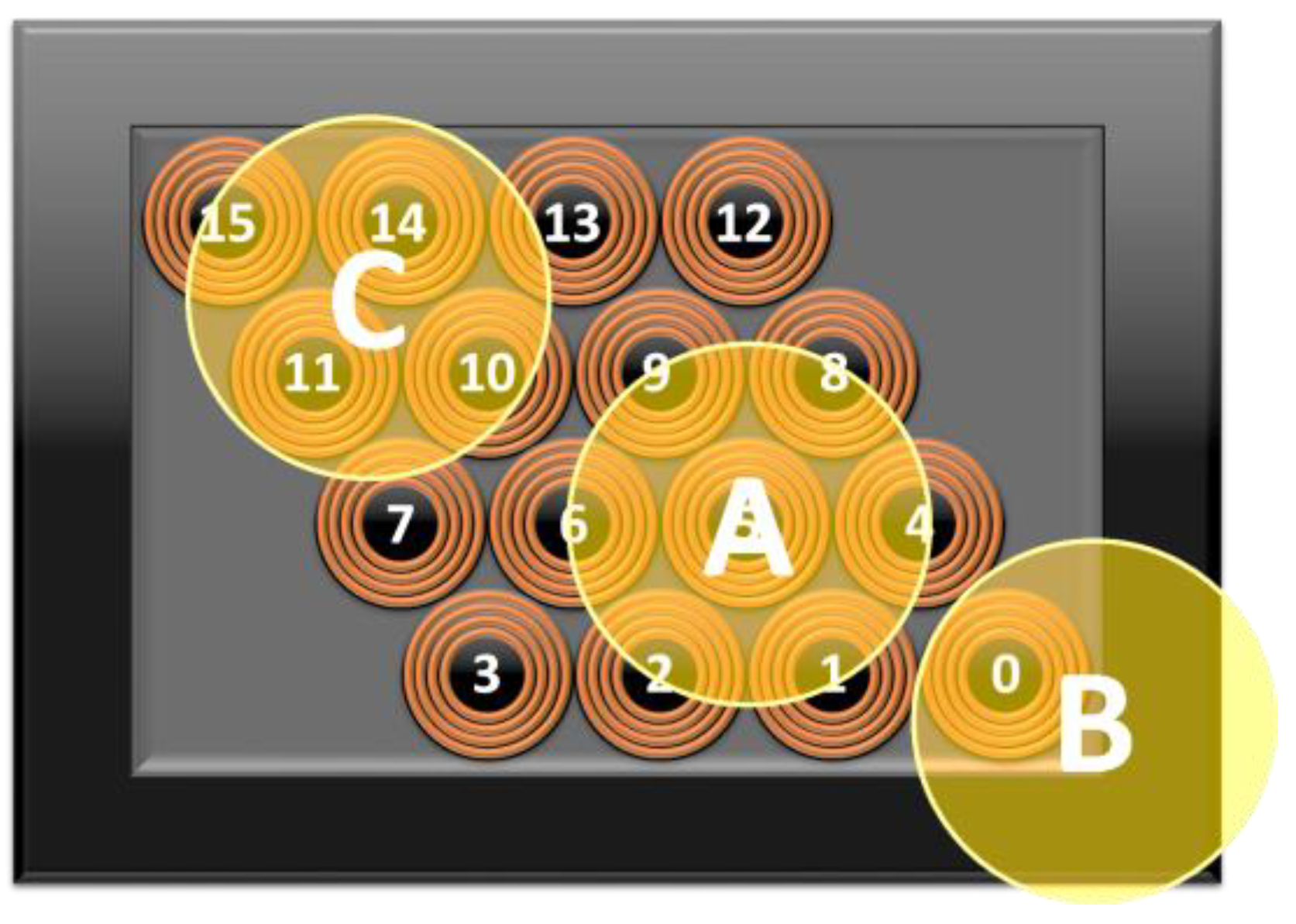
The developed MISO-WPT system allows the supply of battery-less devices for different positions with a small primary side electronic circuit. For that, the receiving coil radius is two times bigger than the transmitting coil radius, which can occupy an area of three transmitting coils. In this case, some critical charging cases can be designed. Some examples of the receiving coil positions can be defined in
Figure 3 as position A (PA), position B (PB), and position C (PC). The position PA defines the ideal position between the transmitting coil (C5) and the receiving coil centers. In this case, the transmission efficiency is maximal. The PC illustrates a lateral misalignment between the receiving coil and the transmitting coil C11. While the PB presents an extremely misalignment in case of the transmitting coils on the borders of the MISO-WPT system. In the case where the receiver device is in the PC, the activated transmitting coil is selected by the comparison of the received voltage on the device. However, in the case of the PB, the powering of the device depends only on the transmitting coil placed under it. Furthermore, due to the various possible receiver positions, the detection of the adequate transmitting coil requires communication between both system sides to define the transmitting coil delivering the highest receiving voltage. By the use of the multiplexed supply circuit, the detection phase starts with identifying the presence of the receiver, then checking the selected coil neighbors to define the highest received voltage. The circuit is maintained active to detect the receiving coil, which increases the circuit current consumption during the detection phase.
A passive peak detector is associated with the circuit allowing the detection of the receiving side without communication for a low working frequency. If a voltage variation is detected, the working frequency increases to the resonance frequency, which allows the communication between both sides to check the selected coil neighbors. However, the system frequency influences not only the circuit current consumption, but also the passive peak detector circuit sensitivity.
In this section, a study of the detection frequency allowing low current consumption and good detection sensitivity is presented. Then, the developed algorithm is described in detail.
3.1. Investigation of the Working Frequency Influences on Current Consumption
The system frequency influences the transmission efficiency, the system current consumption and the sensitivity of the passive-peak voltage sensor.
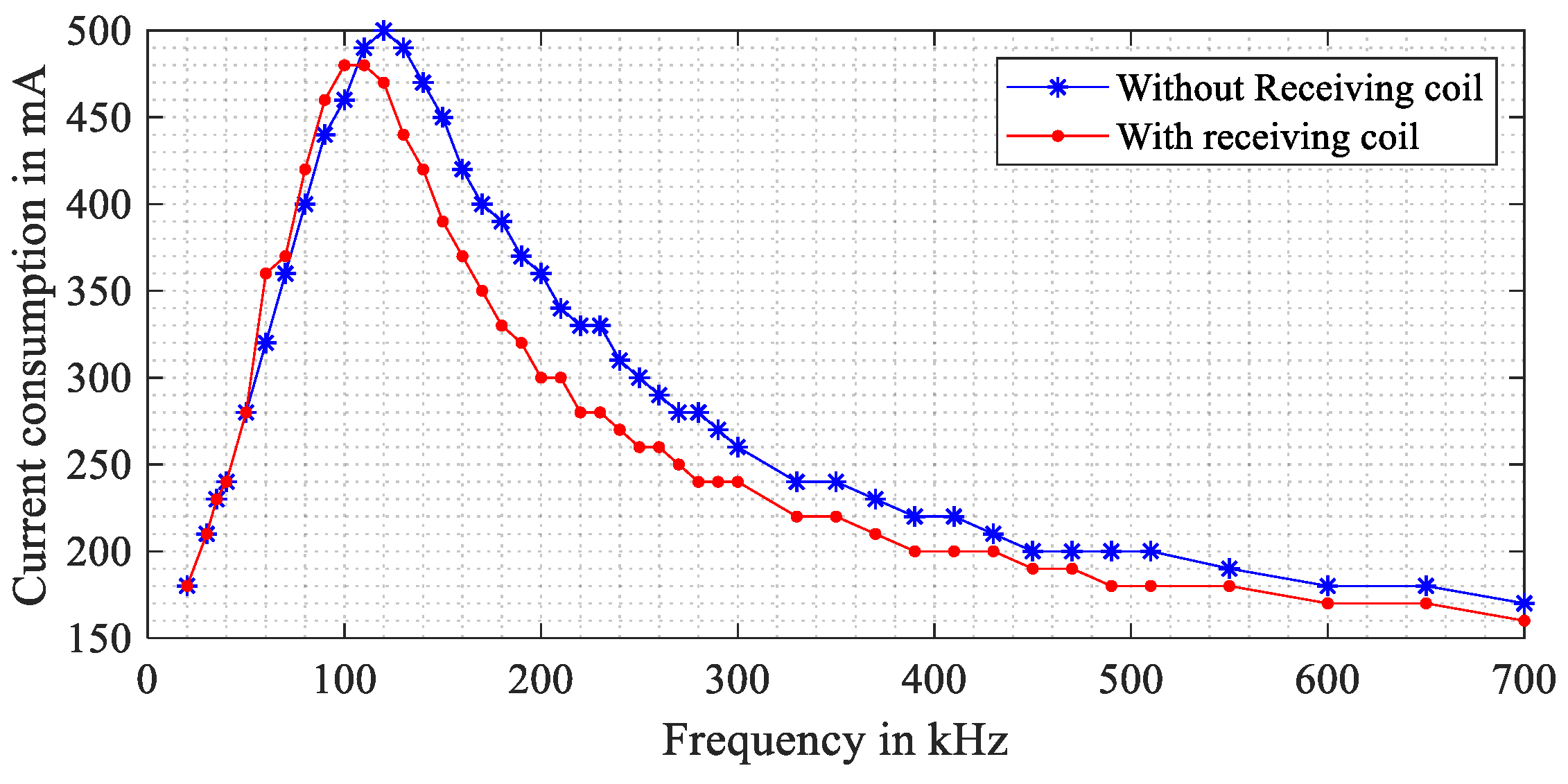
Figure 4 illustrates the circuit current consumption in case of the presence and the absence of the used WSN for frequencies between 20 kHz to 700 kHz. Results show that the current consumption increases approximately 450 mA near the system resonance frequency. However, the current consumption is less than 250 mA for the frequencies between 20 kHz to 60 kHz and above 200 kHz.
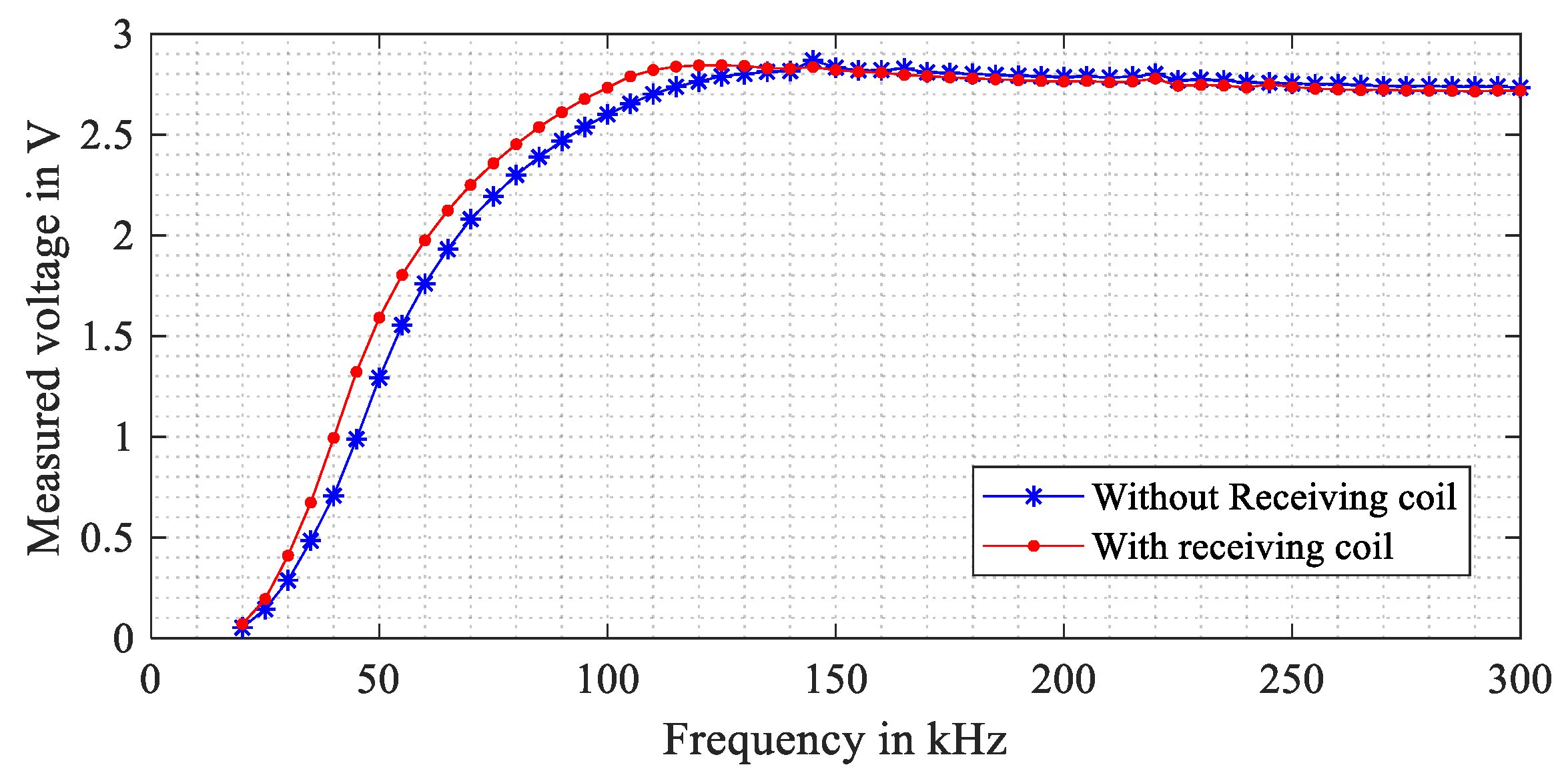
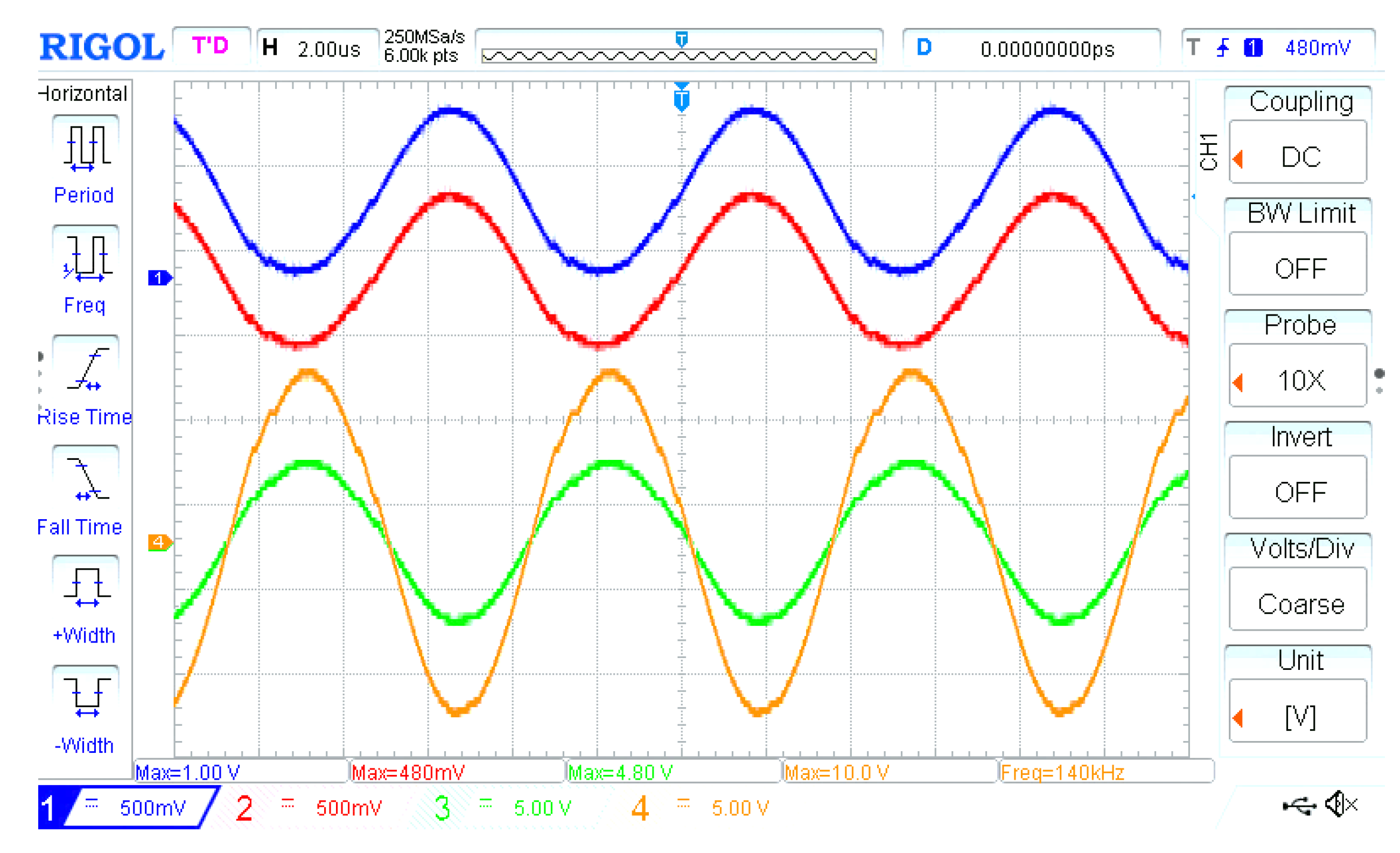
Moreover, to study the sensitivity of the receiving device detection in different working frequencies, a measurement of the peak detector voltages behavior in case of the presence (V
Recei) and the absence (
VNO-Recei) of the wireless sensor node on the top of an adequate transmitting coil is presented in
Figure 5. In fact,
Figure 5 shows among others that at 20 kHz the detectability is weak as the reflected field becomes very low. In the circuit design, an additional voltage divider and Zener diode to protect the microcontroller board are associated with the output of the passive peak sensor. Results of
Figure 5 shows that the variation of the measured voltage in the case of presence and absence of the receiving coil increases near the resonance frequency.
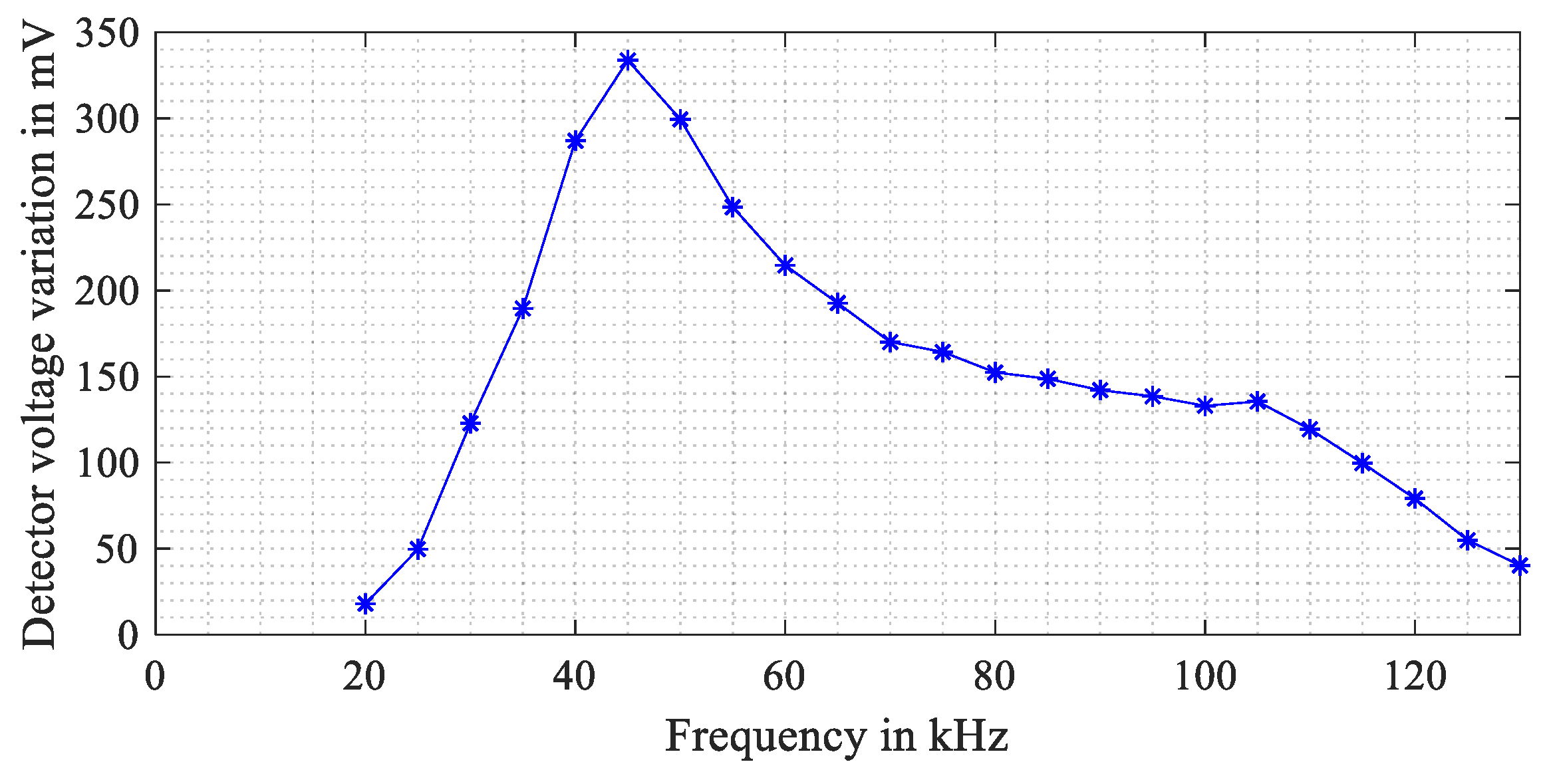
A measurement of the voltage peak detector sensitivity (Δ
Vdetec), which is defined as the resulting value from the difference measured voltages in the case of presence and absence of the receiving side (see Equation (10)).
Figure 6 shows that for a frequency between 30 kHz to 130 kHz, the detection of the presence of the receiving device is acceptable due a voltage variation more than 50 mV. For a voltage variation below 50 mV, errors during detection with a passive peak detector circuit are more common. However, for a working frequency between 35 kHz to 45 kHz, an appropriate balance between the directivity of the receiving coil and current consumption is confirmed with a low frequency reducing the possible eddy currents losses.
3.2. Proposed Algorithm
The proposed algorithm ensures the detection and the powering of the battery-free WSN on the top of the MISO-WPT WPT. Before the implementation of the algorithm, a calibration process is required to define the voltages sensor in the case of the presence or absence of the receiving side on the top of the transmitter phase.
Figure 7 illustrates the main algorithm flowchart, which is composed of four sub-algorithms: Scanning phase, check the communication between coils, check neighbors, and powering transmitting coil (Tx) phase. The initialization sets the microcontroller registers, adjusts the DDS frequency to 35 kHz and ensures the selection of the first transmitter coil. The Ch._Com and Ch._Neigh refer to the check communication phase and check coils neighbors state, respectively. V_Th is the define threshold voltage and Nei.Coun. is the neighbor counter parameter. The neighbor channel is mentioned as Nei_Ch.
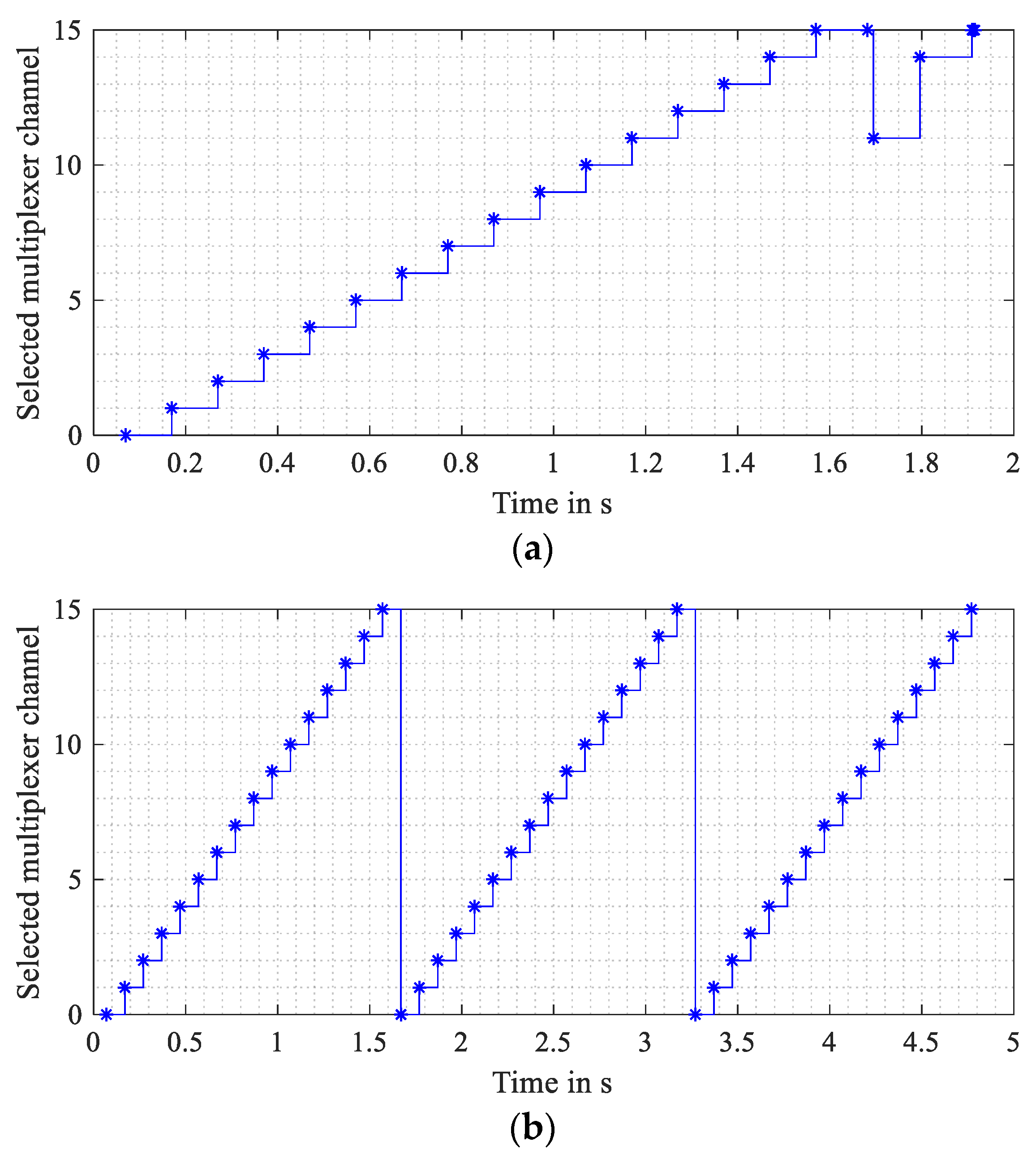
The scanning phase sub-algorithm presented in
Figure 8 consists of the activation of the transmitting coil one by one. For each activated transmitting coil, a measurement of the peak voltage indicates the presence or the absence of a receiving device near it. If the receiving coil is detected, the system changes its working frequency to 140 kHz to increase the transmitted power and passes to the checking neighbor phase.
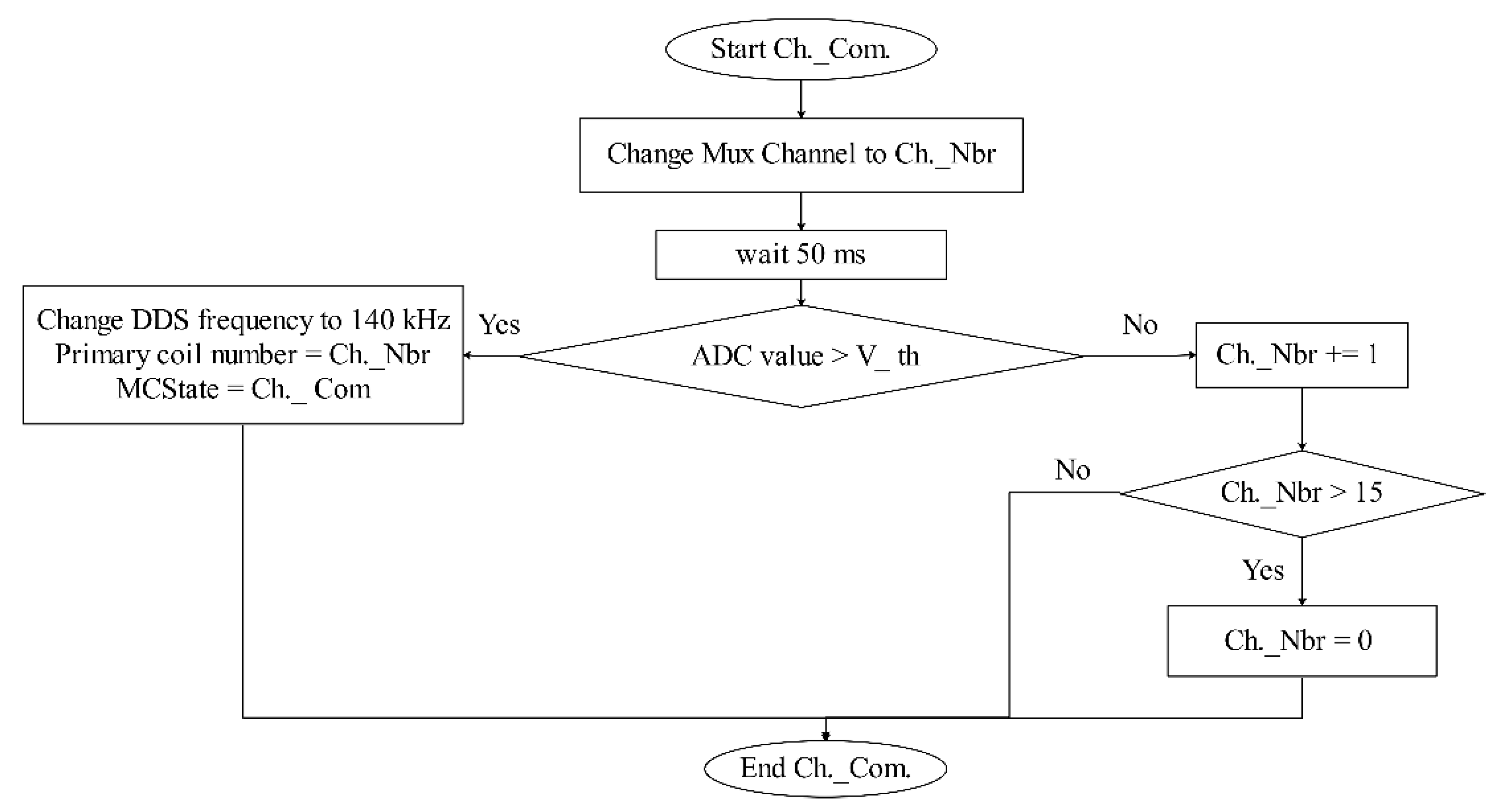
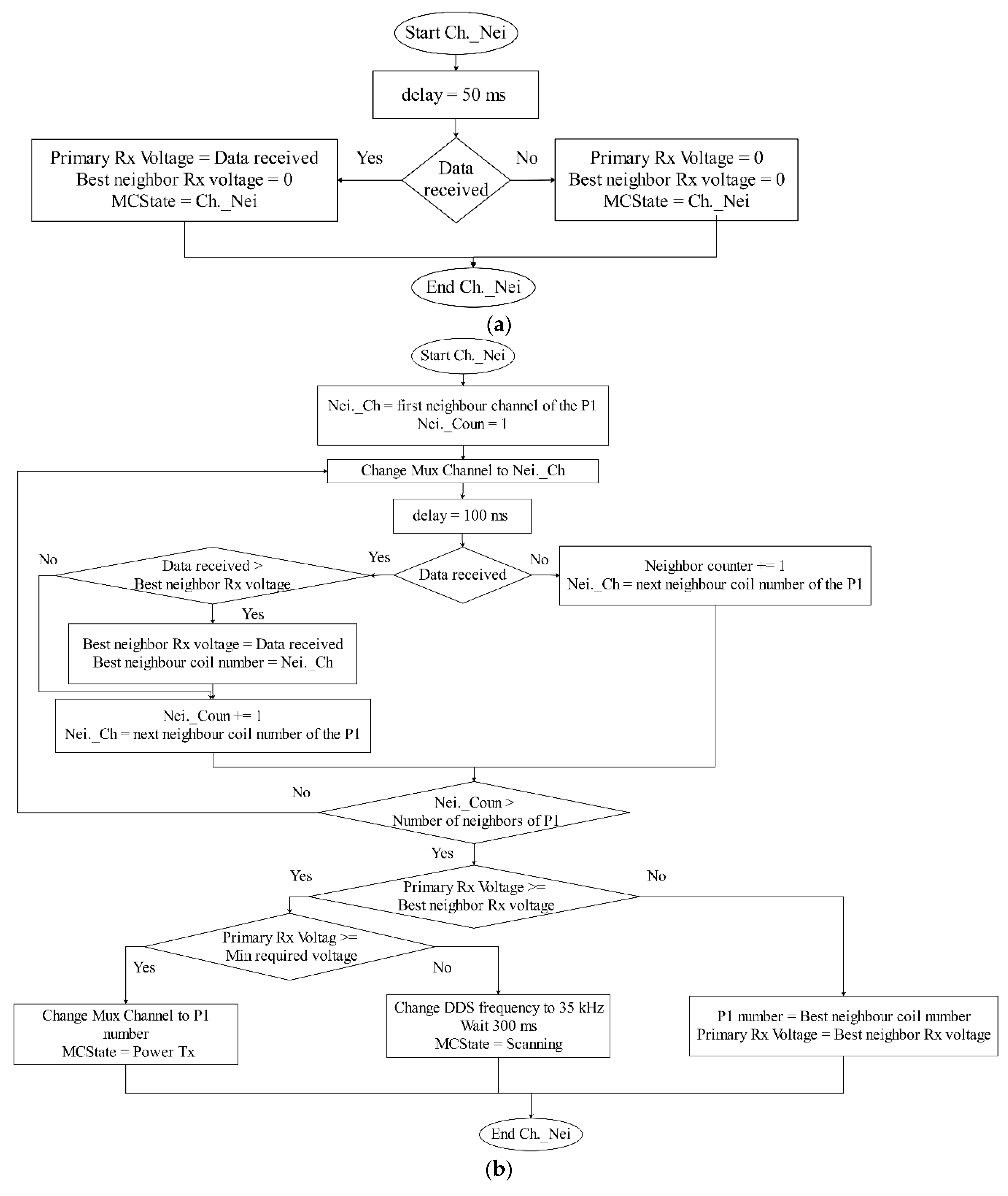
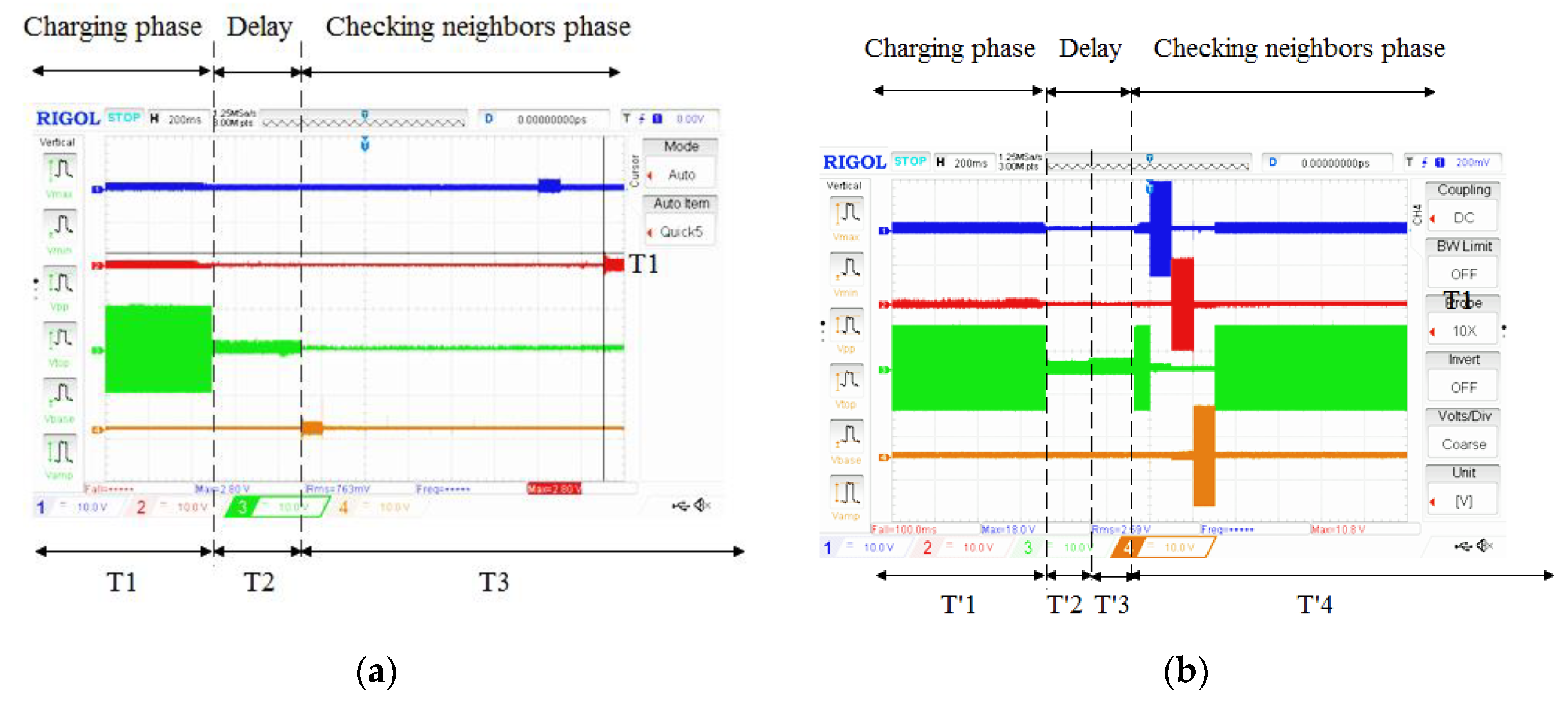
At the resonance frequency (140 kHz), the transmitted energy allows the communication between the primary and the secondary sides, which starts the check neighbor state (
Figure 9a). As presented in
Figure 9a, after a delay of 50 ms, the system starts to check for initiated communication from the secondary side allowing a maximum of 50 ms as a communication establishment time out. After the time out, if a communication between the transmitter and the secondary side is not detected, the system continues the scanning phase by moving the next transmitter coil; otherwise, the check-neighbor phase is activated. It consists of activating neighbors one by one and checking, for each one, the existence of communication with the receiver coil (see
Figure 9b). The selection of the adequate transmitting coil to start the powering process refers to the index of the coil with the maximum received voltage level considering both the primary coil and its neighbors. The primary coil is selected for power transmission if it has a higher received voltage than its neighbors. In the case of the existence of neighbors with higher received voltages than the primary coil, the neighbors of the neighbor coil with the maximum received voltage are checked in the next iteration. If the communication between the transmitter and the secondary sides is not established, the system returns to the scanning phase.
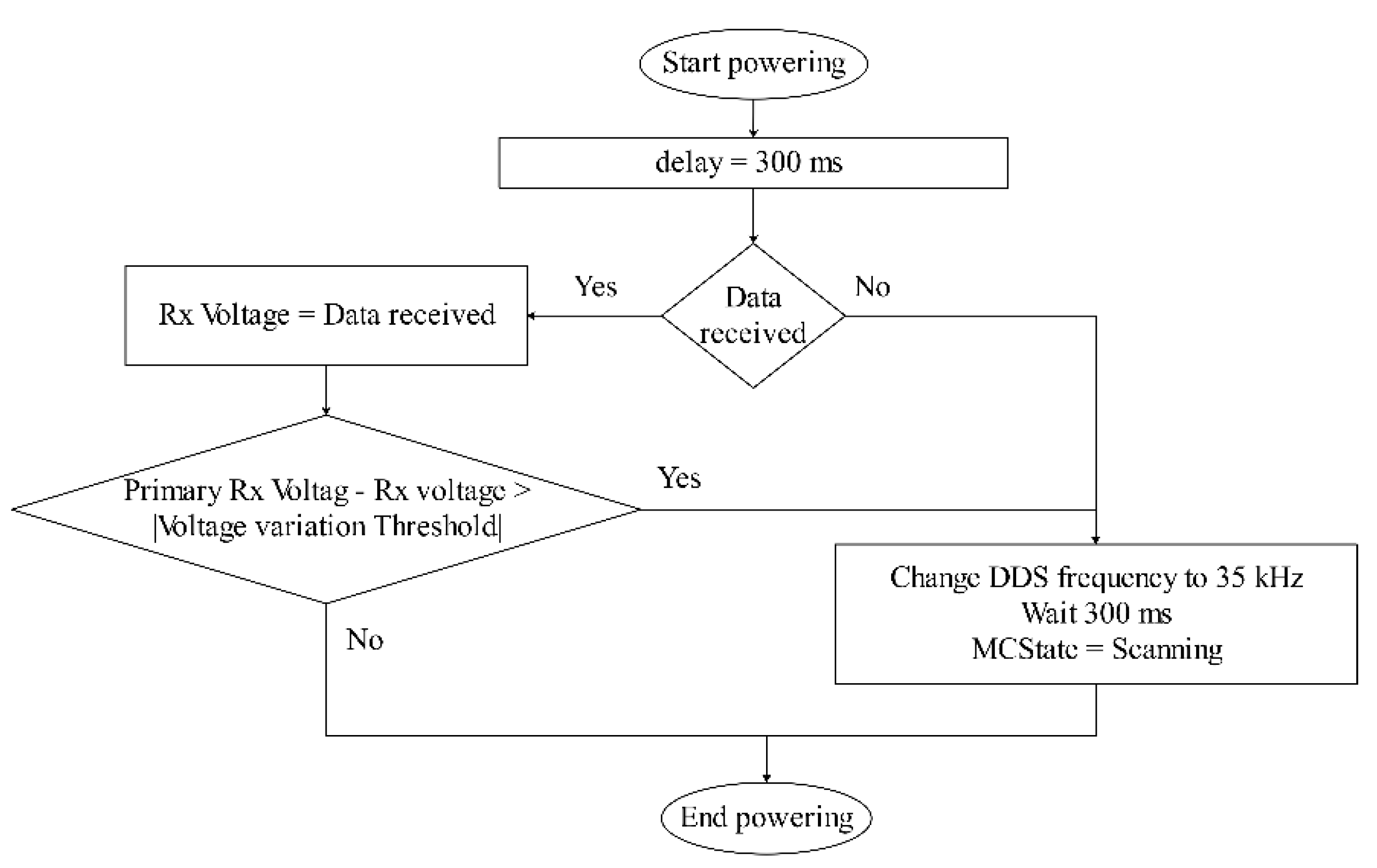
During the powering phase (see
Figure 10), a continuous communication between the transmitter and the secondary sides is maintained to ensure the developed system security. If the communication is stopped due to the absence of the WSN or a variation in the received voltage is detected with a magnitude higher than a predefined threshold, the system switches to the scanning phase and switches to an operation frequency at 35 kHz.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}