1. Introduction
Wireless electric vehicle charging (WEVC) is gaining worldwide attention and developing very quickly [
1,
2,
3]. Compared to the conductive charging method, WEVC eliminates the bulky cables, the requirement of a manual connection, and the associated hazards. WEVC exhibits many attractive advantages such as convenience, safety and weatherproofing. Both inductive power transfer (IPT) and capacitive power transfer (CPT) can be used for WEVC [
3]. This paper is focused on the IPT system.
For IPT systems, the coil misalignment greatly deteriorates the transferred power, efficiency and leakage of magnetic flux [
3,
4]. Much research to improve the misalignment tolerance of IPT systems has been conducted [
5,
6,
7,
8,
9,
10,
11,
12]. The preferred approach is to optimize the coil structure [
5,
6,
7], which maintains a relatively uniform magnetic field distribution during misalignment. Another approach is to optimize the compensation network, which improves the circuit performance under misalignment conditions [
8,
9,
10,
11,
12]. However, the improvement of misalignment tolerance is limited, and the charging still needs to take place in a limited charging zone. To confirm the pickup coil being within the charging zone, the position detection of power coils is indispensable for a practical wireless charger, as described by SAE J2954 [
13]. On the other hand, if the position detection method is of high accuracy, it can be combined with the autonomous parking technology to align the power coils accurately. This will reduce the need to design an IPT system with large misalignment tolerance. Accordingly, the extra hardware cost and control cost for the misalignment tolerance improvement can be reduced. Therefore, for a commercialized wireless EV charger, the cost of improving position detection accuracy and the cost of improving misalignment tolerance should be traded off.
Some position detection methods available on the market have been considered for WEVC, such as radio frequency (RF) positioning [
14,
15,
16,
17,
18,
19,
20], optical positioning [
21,
22] and acoustical positioning [
23]. However, RF positioning and acoustical positioning both suffer signal multipath impairment and non-line-of-sight impairment when they work in a complex environment. The optical positioning methods, including visual image analysis and infrared positioning, are susceptible to obstacles, dust and harsh weather. Meanwhile, all the methods above are limited by their high cost and difficulty in integrating with the power pads. Magnetoresistive (MR) sensors are investigated to be used for coil misalignment detection [
24,
25,
26,
27], but this method has not achieved precise three-dimensional (3D) coordinate output, and plenty of sensors involved in the sensor matrix greatly increase the system cost and complexity. Moreover, some magnetic positioning methods are proposed in [
28,
29,
30,
31,
32,
33], which utilize auxiliary coils to measure the magnetic field generated by the primary power coil. The magnetic positioning methods are of high accuracy, low cost, not susceptible to the environment and are easy to integrate with power pads. In [
28,
29,
30,
31,
32,
33], the primary power coil needs to generate a very weak magnetic field for positioning. Thus, the primary resonant tank is excited by a very low-voltage source during positioning. For this very low-voltage mode, the primary high-power inverter has to switch to a very low direct current (DC) bus voltage [
31,
32], or to operate with a very large phase-shift angle [
33]. However, either the added bus selection switches or the large phase-shift operation will decrease the reliability and safety of the high-power inverter. Moreover, the inverter can only work in the high voltage mode for power transfer, or the low voltage mode for positioning at a time. Thus, position detection and power transfer cannot be simultaneously conducted, i.e., the online position monitoring is impossible.
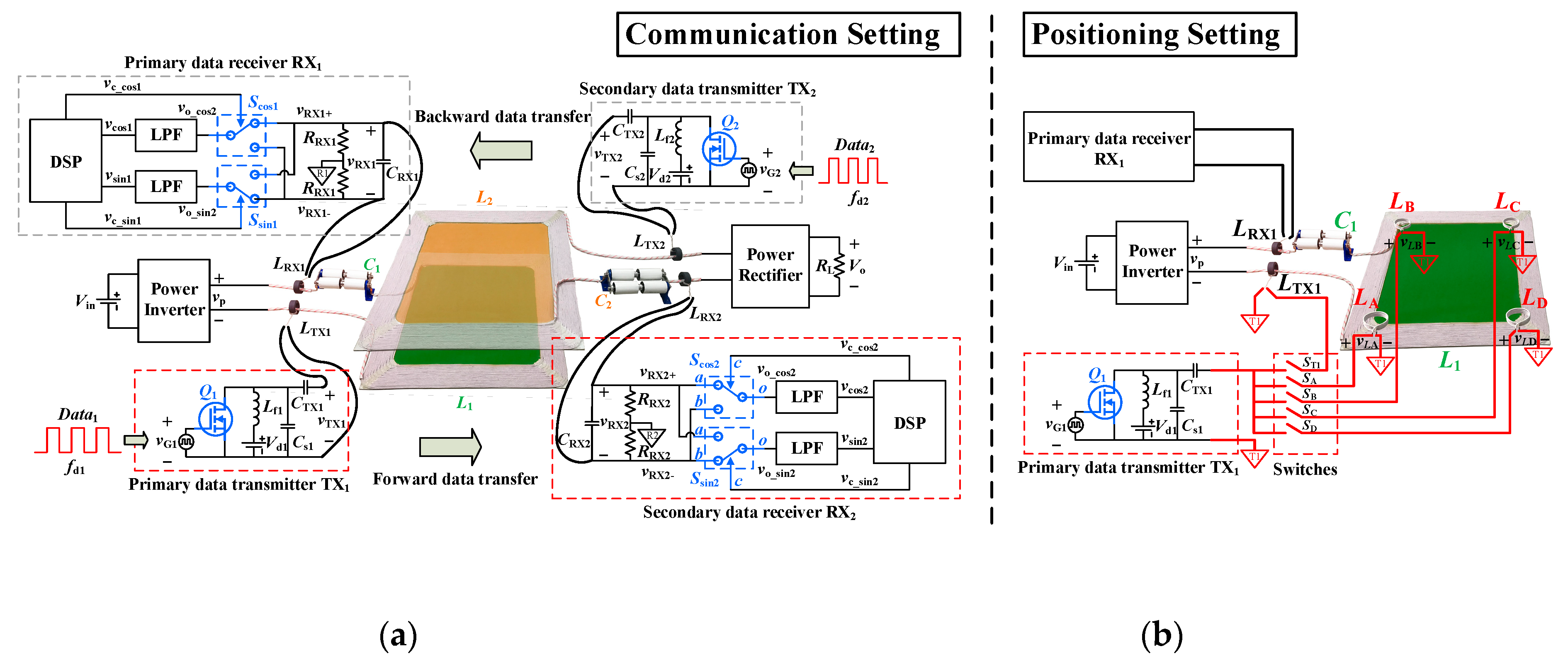
We have proposed a simultaneous wireless power and data transmission (SWPDT) system in [
34], which is based on the frequency division multiplexing (FDM) technique and quadrature phase-shift keying (QPSK) modulation. A high-frequency data carrier is modulated by four discrete phase shifts to represent two binary bits. The data carrier is injected into one side of the IPT system, and then it transfers to the other side through the magnetic coupling between power coils. The data carrier is then extracted and demodulated, so that the near-field communication can be achieved. In this method, the amplitude of the data carrier is not utilized for communication purpose. However, the receiving amplitude of the data carrier is proportional to the mutual inductance between power coils, which means it contains the relative position information of power coils. Unfortunately, the three-dimensional (3D) position cannot be determined exactly by only one mutual inductance. Thus, more independent mutual inductances should be involved to derive the 3D coordinate. This idea has been revealed in our preliminary work [
35].
Based on the near-field communication technology in SWPDT, this paper proposes a magnetic positioning method, which has the following features:
(1) Four auxiliary signal coils are added for positioning while other hardware is shared with the SWPDT system.
(2) The positioning signal is transmitted by the signal coils rather than the primary power coil, so the very low voltage mode of the high-power inverter, as mentioned before, is avoided.
(3) The positioning process can be carried out both in the power transfer online condition and in the power transfer offline condition. The proposed amplitude measurement method is immune to the power fundamental interference and ensures online positioning accuracy.
(4) The communication need in the positioning process can be well satisfied by SWPDT technology. A highly integrated IPT system for WEVC is achieved, i.e., simultaneous power transfer, data transmission and position detection.
3. Optimal Number and Locations for Auxiliary Signal Coils
According to (17) and (18), the change of the secondary coil position leads to the change of effective mutual inductances, and further leads to the change of receiving signal amplitudes. For the same position change, the more the effective mutual inductances change, the higher position resolution will be obtained, i.e., the higher positioning accuracy. Thus, the optimal locations for the signal coils are the places where the gradient of effective mutual inductance ∇
Meff is maximized.
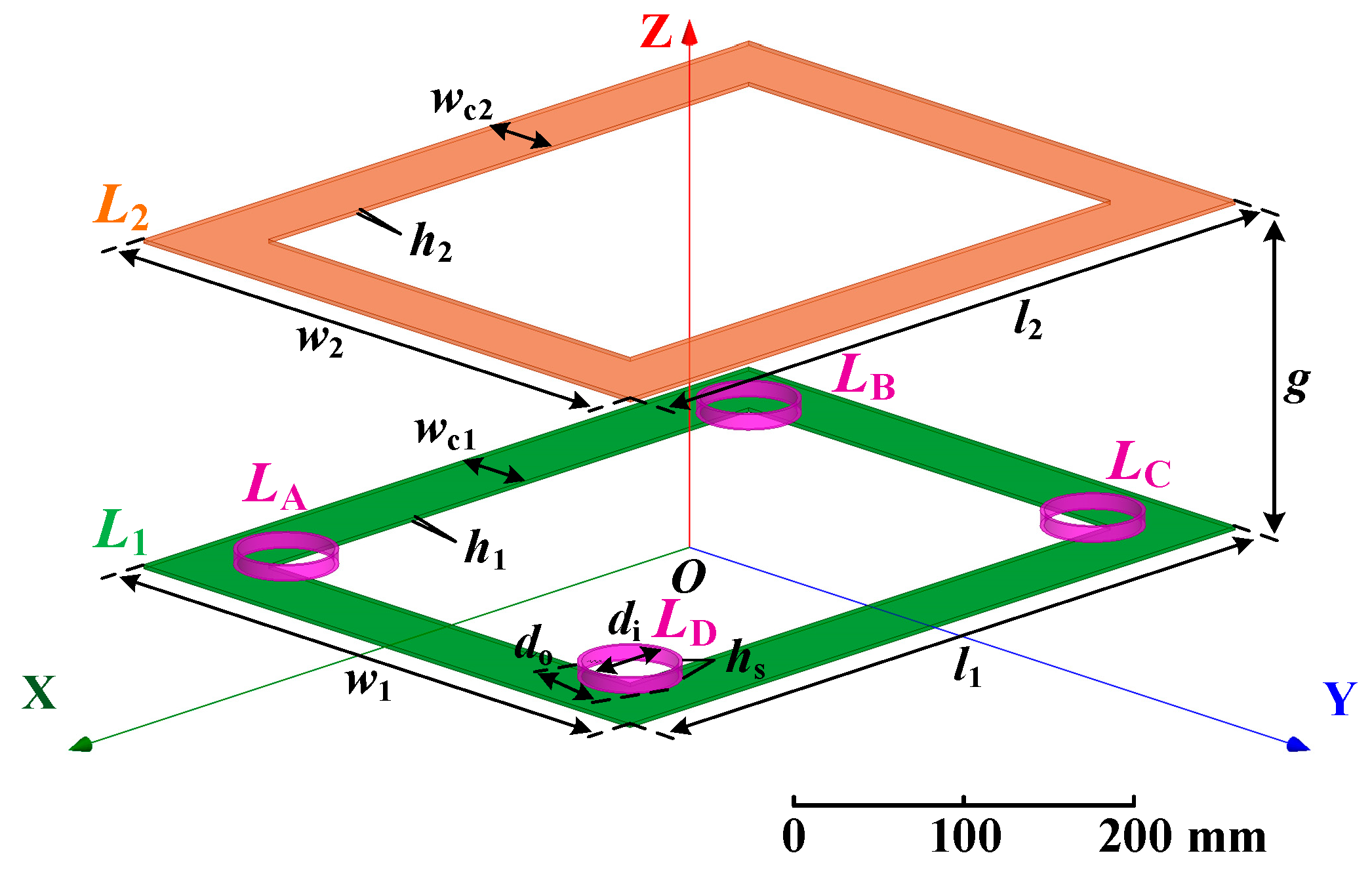
Simulations were conducted in ANSYS Electromagnetics Suite to find the optimal locations. The Cartesian coordinate system for positioning is built in
Figure 4, of which the origin is set to the three-dimensional geometric center of the primary coil. The dimensions of the power coils and signal coils are listed in
Table 1. The position of each coil is represented by the coordinate of its three-dimensional geometric center. In the normal alignment condition, the primary coil coordinate (
x1,
y1,
z1) is (0, 0, 0), and the secondary coil coordinate (
x2,
y2,
z2) is (0, 0, 160 mm).
To minimize the installation space of the signal coils in practice, it is better to place the signal coils in parallel with the primary coil, i.e., in parallel with the XOY plane. In this condition, only the z-component of flux density through the signal coil will contribute to the effective mutual inductance with the secondary coil. Thus, we can energize the secondary coil and find the places where the gradient of flux density z-component ∇
Bz is maximized. These places also have the maximized gradient of effective mutual inductance ∇
Meff. The gradient of flux density z-component ∇
Bz is defined as:
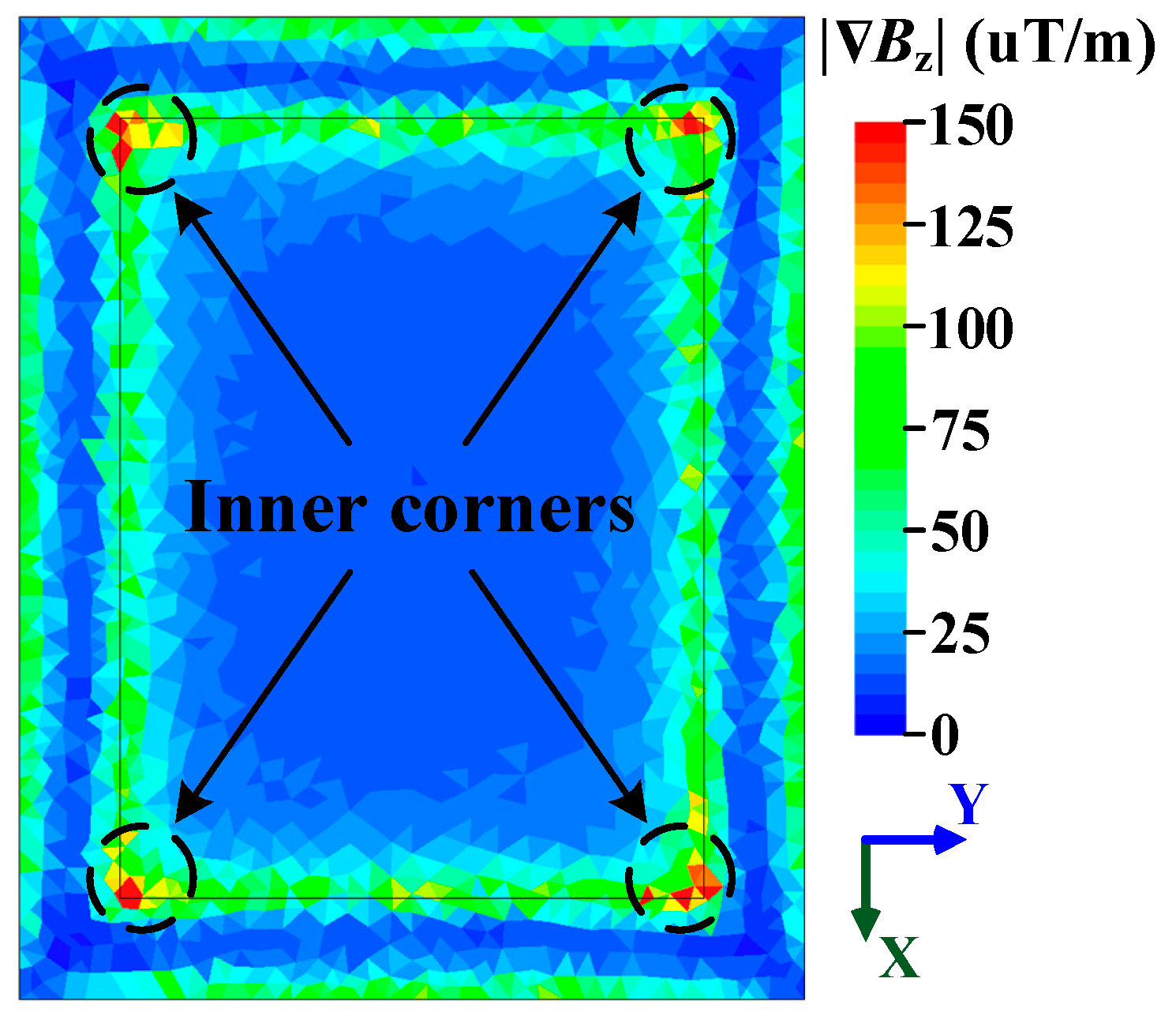
In the simulation, the secondary coil is energized with a 1-A current. Since the thickness of the signal coil is 10 mm, the gradient magnitude |∇
Bz| on the plane 10 mm above the primary coil is depicted in
Figure 5. It can be seen that the highest gradient magnitude appears at the four inner corners. This means the mutual inductance at these places will change to the greatest extent when the secondary coil position changes. Thus, the position resolution can be maximized when the signal coils are placed at the inner corners above the primary coil.
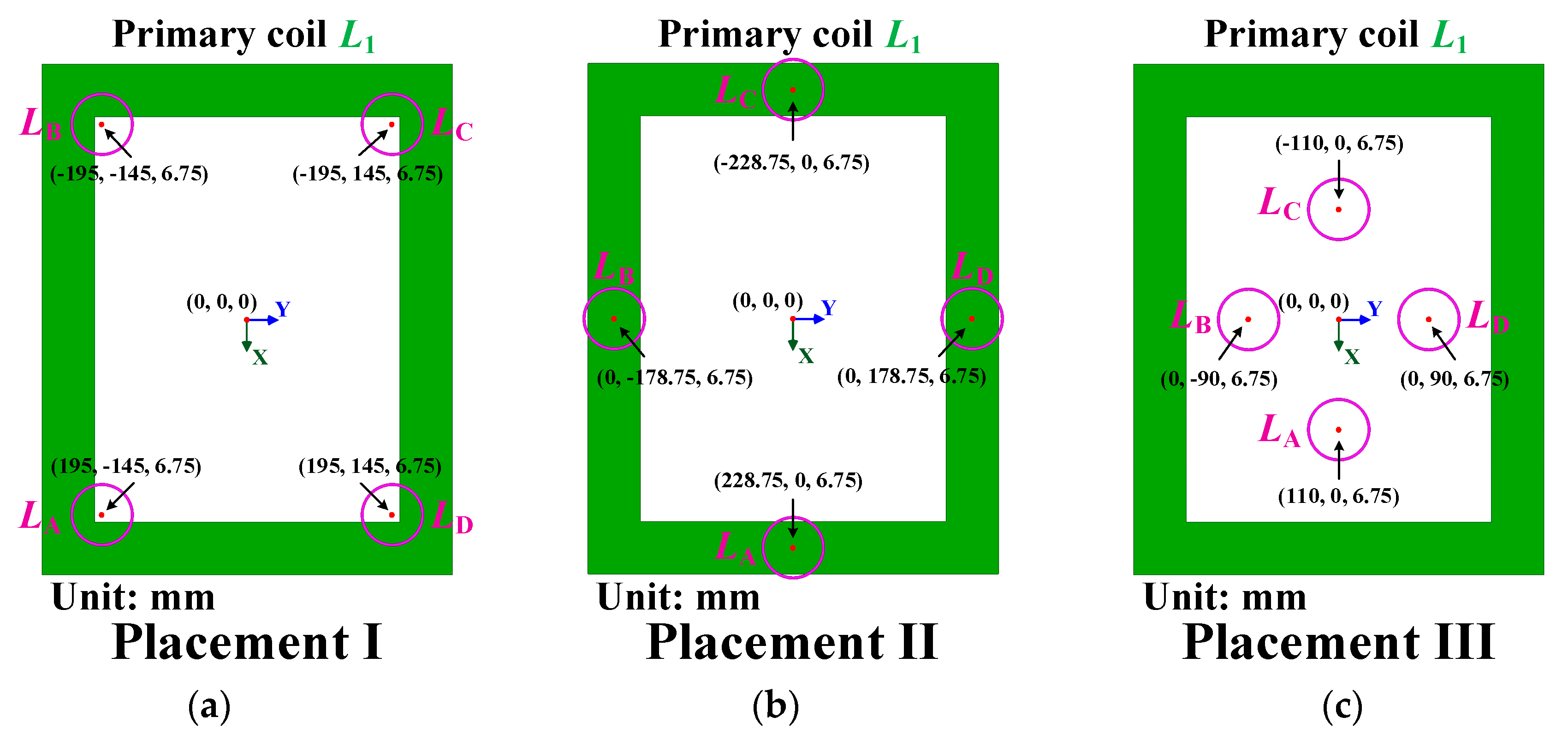
To verify the optimal locations for the signal coils, three kinds of signal coils placement are simulated and compared, as shown in
Figure 6. The primary coil is colored by green, and the signal coils are colored by pink. Their coordinates are also given in
Figure 6.
In the simulation, the primary coil coordinate (
x1,
y1,
z1) is always fixed at (0, 0, 0). In the initial condition, i.e., the normal alignment condition, the secondary coil coordinate (
x2,
y2,
z2) is (0, 0, 160 mm), which is also denoted by (
x20,
y20,
z20). Then the secondary coil moves along three axes, and its position change along three axes are denoted by
Δx2,
Δy2 and
Δz2, respectively.
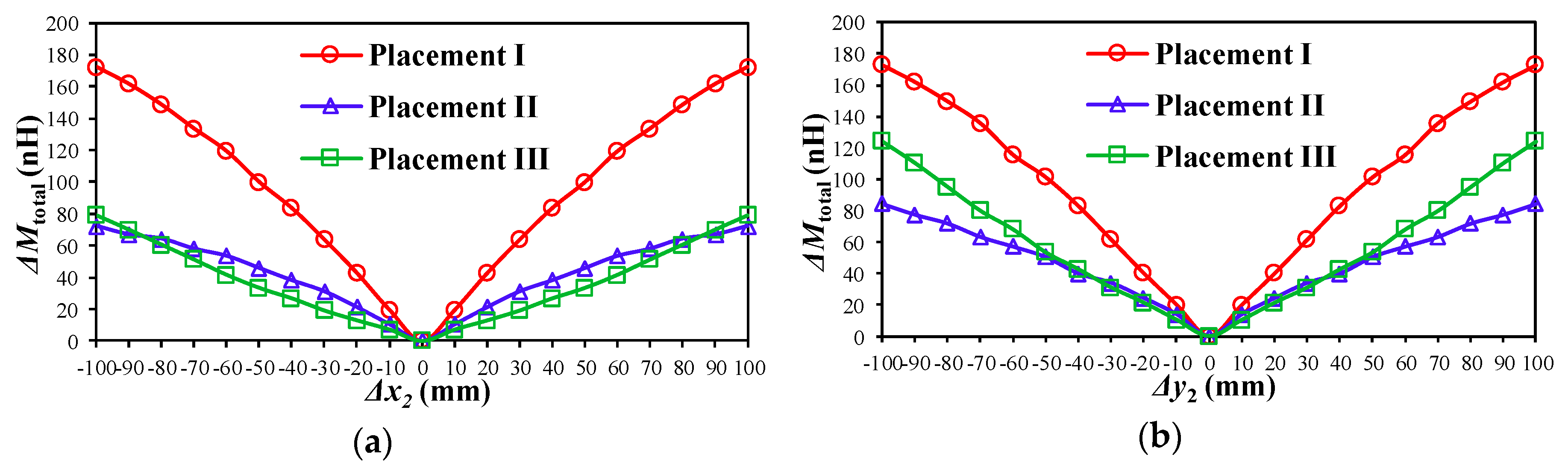
The total change of effective mutual inductances Δ
Mtotal is used to evaluate the performance of coil placement, which is defined as:
where
M’eff(A),
M’eff(B),
M’eff(C),
M’eff(D) are the effective mutual inductances in the initial condition, i.e., when (
x2,
y2,
z2) is equal to (
x20,
y20,
z20), and
Meff(A),
Meff(B),
Meff(C),
Meff(D) are the effective mutual inductances when the secondary coil is moved. Thus, Δ
Mtotal describes the total change of four effective mutual inductances relative to those of the initial position (
x20,
y20,
z20).
When the secondary coil moves along three axes, Δ
Mtotal in the three placement conditions are depicted in
Figure 7a–c. It can be seen that the Placement I always has the maximum Δ
Mtotal for the same position change along x, y and z axes. The results are consistent with the gradient analysis in
Figure 5. This means the Placement I will produce the maximum change of the receiving signal amplitude vector (|
VRX2(A)|, |
VRX2(B)|, |
VRX2(C)|, |
VRX2(D)|). As a result, the highest positioning resolution can be obtained from Placement I.
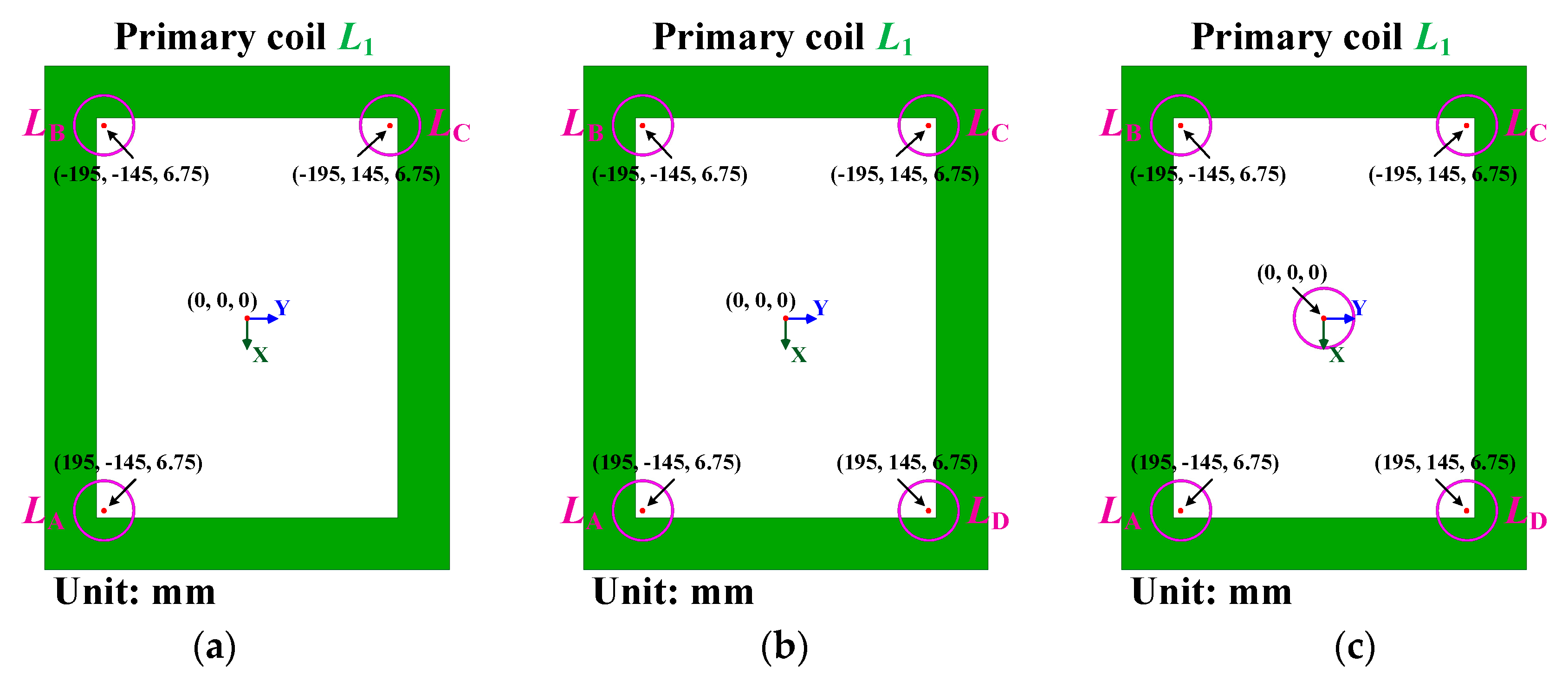
To find out the optimal number of signal coils, placements with different numbers of signal coils are analyzed. To achieve 3D positioning, at least three signal coils are needed. Thus, the placements with three coils, four coils and five coils are simulated, as shown in
Figure 8. The placement with three coils occupies three inner corners to maximize the sensitivity, as shown in
Figure 8a. The placement with four coils in
Figure 8b is same as the Placement I in
Figure 6a, which has been proved the best placement for the four-coil structure. The placement with five coils adds a central coil, as shown in
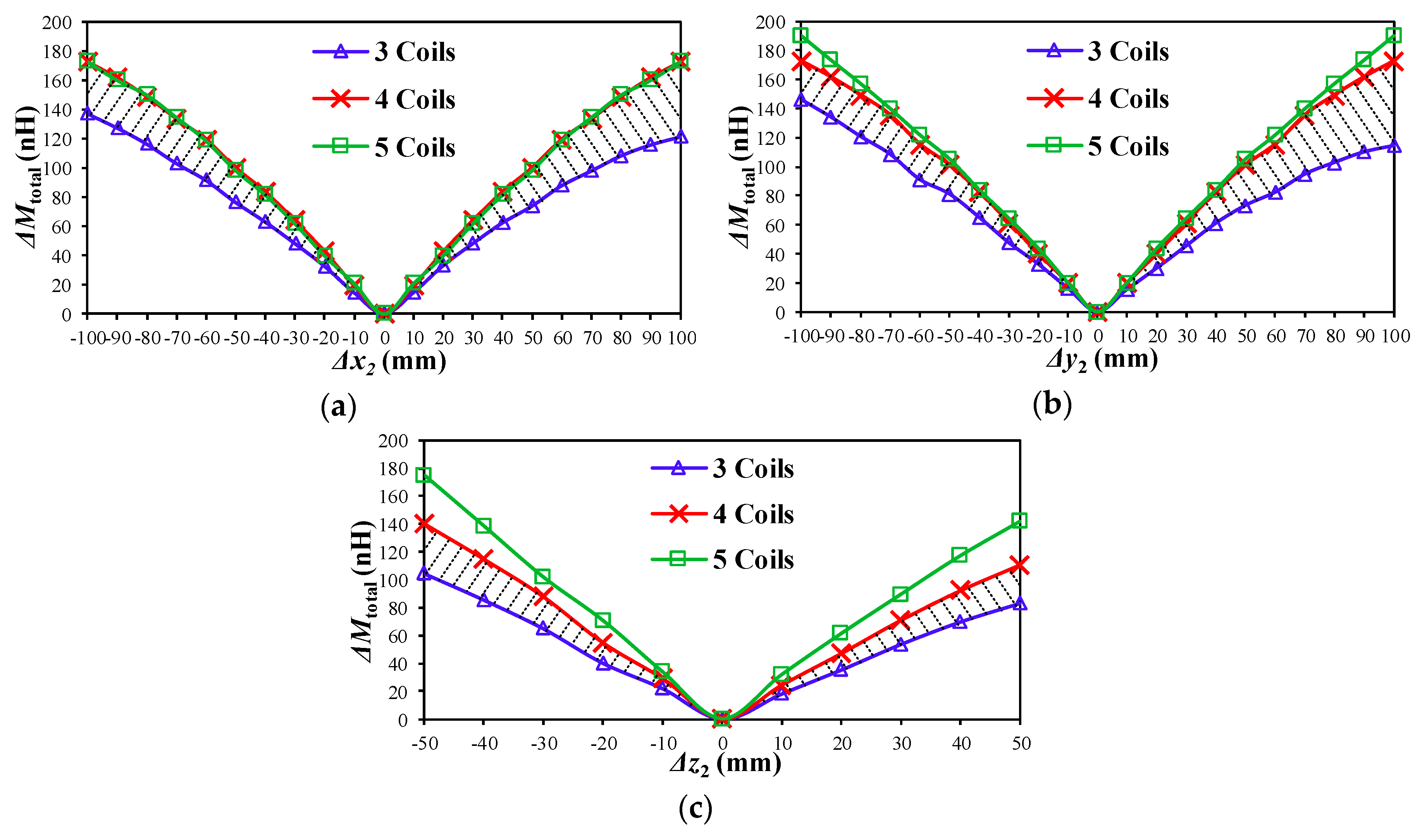
Figure 8c. The results of Δ
Mtotal for different numbers of coils are depicted in
Figure 9a–c. Compared to three coils, four coils can significantly improve the position sensitivity in all three directions. These improvements are indicated by the shadow areas in
Figure 9a–c. Specifically, Δ
Mtotal is increased 42% at
Δx = 100 mm, increased 51% at
Δy = 100 mm, and increased 35% at
Δz = −50 mm. However, from four coils to five coils, the further improvement is very limited. There are nearly no improvements in Δ
Mtotal when moving along x and y axes. In the z direction, Δ
Mtotal is increased only 25% at
Δz = −50 mm. Thus, four coils are the most cost-effective with regard to accuracy and complexity. More than four coils bring little improvement in positioning accuracy but increase complexity and costs.
4. Amplitude Measurement of Positioning Signal
In
Figure 3, the receiving positioning signal
vRX2 is a high-frequency sine wave (5 MHz). The conventional method to measure the amplitude is to rectify the high-frequency wave and sample the DC voltage by analog-to-digital converter (ADC) [
33], i.e., the envelope detection. However, in the power transfer online condition, the envelope detector will be severely interfered by the power fundamental component, which is also received by signal extractor
LTX2. Thus, it is unsuitable for online positioning.
In [
34], the data receiver circuit RX
2 has been proved immune to the power fundamental component when it works as data demodulator. Also, it is not hard to see that the data receiver output also contains the amplitude information of the receiving signal
vRX2, which is just neglected in the communication process in [
34]. Thus, we can reuse the data receiver RX
2 to measure the positioning signal amplitude. No extra hardware is needed and the measurement is immune to the power fundamental interference.
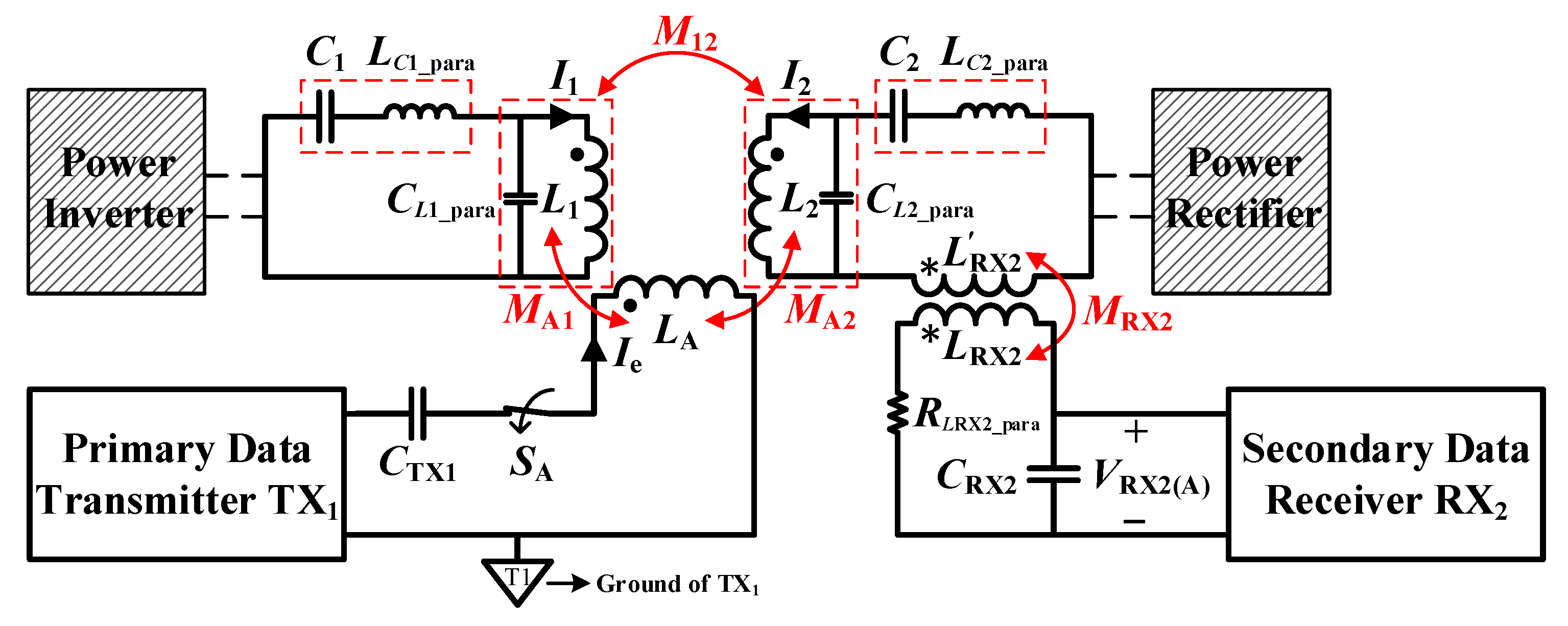
The amplitude measurement circuit is separated from
Figure 1a and redrawn in
Figure 10a. Similar to (1) and (3), the transmitting signals
vLA–
vLD and the receiving signals
vRX2(A)–
vRX2(D) in positioning can be expressed as:
where
i = A, B, C or D, which indicates the transmitting coil. |
VLi| is the transmitting amplitude on
LA–
LD, |
VRX2(i)| is the receiving amplitude from
LA–
LD, and
φt(i) is the phase shift of the transfer channel.
φ(
n) is the transmitting phase shift containing data bits, as illustrated in
Section 2.1.
Since the receiving signals
vRX2(A)–
vRX2(D) are equivalent for the amplitude measurement circuit, the subscript
i (
i = A, B, C or D) is omitted in the following analysis for simplification. In
Figure 10a, the receiving signal
vRX2 is divided by two identical resistors
RRX2 which are grounded at the center to produce a pair of differential outputs
vRX2+ and
vRX2−.
The differential signals
vRX2+ and
vRX2– are respectively connected to the two inputs,
a and
b, of the single-pole double-throw analog switches,
Scos2 and
Ssin2. The output table of the analog switch is shown in
Table 2.
The control signals of two switches
vc_sin2 and
vc_cos2 are square waves with frequency
fd1’, and they are shifted by π/2 with each other, as shown in
Figure 10b. Thus, each analog switch output
vo_sin2 or
vo_cos2 is equal to
vRX2+ multiplied by the respective square wave as:
where
k = 1, 3, 5…;
φc is the phase shift between the receiver control signal and the transmitter reference phase. In
Figure 10b,
φc and
φt are both set to zero for clarity.
Applying the trigonometric product-to-sum formula to (27) and (28), it can be derived that
vo_sin2 and
vo_cos2 are composed of
fd1 ±
kfd1’ (
k is odd) frequency components. If we set the control frequency
fd1’ equal to the data carrier frequency
fd1,
vo_sin2 and
vo_cos2 will have a DC component (i.e.,
fd1 –
fd1’) and all the other components are higher than 2
fd1, as shown in
Figure 10b. Since 2
fd1 ≫ 0, the DC components in
vo_sin2 and
vo_cos2 are easy to be obtained through low-pass filters (LPF), which are:
The DC voltages
vsin2(
n) and
vcos2(
n) are sampled by the digital signal processor (DSP). Then the amplitude of
vRX2 can be calculated by:
It should be noted that if there is no PLL (phase-locked loop) in the receiver to synchronize the control signal frequency fd1’ with the receiving positioning signal frequency fd1, these two frequencies cannot be exactly equal. The results of (29) and (30) will be two very low-frequency (fd1 – fd1’) sine waves rather than two DC voltages, which is determined by the small deviation between fd1 and fd1’. However, this deviation will not affect the amplitude calculation, since (31) will eliminate the deviation frequency item 2π (fd1 – fd1’) t. Thus, the amplitude of high-frequency signal vRX2 still can be determined by measuring these two very low-frequency sine waves. On the other hand, the receiving amplitude |VRX2| is independent of the transmitting phase shift φ(n) which is related to data transmission. This means the position detection and the data transmission can work simultaneously through auxiliary coils LA–LD.
In the power transfer online condition, the power fundamental component interference fp received on CRX2 will be transformed to fp ± kfd1’ (k is odd) components at the outputs of analog switches according to (27) and (28). Since fp << fd1’, all the transformed components can be easily filtered out by LPF. Thus, the amplitude measurement is immune to the power fundamental component interference.
As discussed in
Section 2, Equation (18) confirms the one-to-one correspondence between the amplitude vector
(|
VRX2(A)|, |
VRX2(B)|, |
VRX2(C)|, |
VRX2(D)|) and the power coils’ relative coordinate
(
x12,
y12,
z12). Thus, the lookup table method can be used to determine the position coordinate
(
x12,
y12,
z12) according to the measured amplitude vector
(|
VRX2(A)|, |
VRX2(B)|, |
VRX2(C)|, |
VRX2(D)|). The procedure of deriving the 3D position coordinate is illustrated by the flowchart in
Figure 11.
5. Experimental Results
To verify the proposed magnetic positioning method, an experimental setup was built, as shown in
Figure 12. The adopted data transceiver hardware is same as that proposed in [
34]. Four auxiliary signal coils
LA–
LD are connected to the primary data transmitter TX
1 output through switches
SA–
SD, respectively. The positioning signal is extracted by
LRX2 and further processed by the secondary data receiver RX
2. The system parameters are listed in
Table 3.
The transmitting waveforms of four auxiliary signal coils are shown in
Figure 13a, where
vLA–
vLD are the voltages on auxiliary signal coils
LA–
LD, respectively. It can be seen that
LA–
LD are enabled in turns to transmit positioning signals, and the enabled time is 1 s for each coil. The transmitting amplitudes of the four signal coils are equal, and keep constant during the power coils’ misalignment. There is a 20 ms dead time between two adjacent signal coils. Each signal coil sends its unique identity (ID) at 100 ms after being enabled, to tell the receiver which coil is sending the signal. The zoom-in waveforms in
Figure 13b show the positioning signal is 5 MHz sine wave.
The receiving waveforms of secondary signal extractor
LRX2 is shown in
Figure 14a. The signal extractor receives the positioning signal sent by
LA–
LD in turns. Since
Figure 14a is measured without power coils’ misalignment, the voltage amplitudes received from
LA–
LD are nearly the same. The output of the amplitude measurement circuit is shown in
Figure 14b. Since PLL is not adopted in the receiver, it can be seen that the waveforms of
vsin2 and
vcos2 are two very low-frequency sine waves (41 Hz) rather than two DC voltages due to the small deviation between
fd1 and
fd1’, as analyzed in
Section 4. DSP samples these two very low-frequency sine waves, and the voltage amplitude received from each auxiliary signal coil |
VRX2(A)|–|
VRX2(D)| can be calculated according to (31).
The ID detection waveforms are shown in
Figure 15. The DQPSK communication method is adopted, which has been illustrated in
Section 2.1. The IDs for
LA–
LD are “A”–“D” in ASCII code, respectively. According to the data mapping table in
Figure 2, the data transmitter TX
1 changes the signal phase to modulate the coil ID into the signal. In
Figure 15, the phase change will result in the transient responses in both transmitter and receiver, which accounts for the voltage spikes in
vLA–
vLD and
vRX2 waveforms. The duration for each data symbol
Tsymbol is 31.25 us, and the bit rate is 64 kbps. On the receiver side, the phase changes are demodulated back to data, which are displayed by the high-bit pin and low-bit pin of DSP, as shown in
Figure 15. The demodulation delay is 16 us.
When the secondary power coil position was changed, the receiving voltage waveforms
vRX2 were measured, as shown in
Figure 16. In
Figure 16a, the voltage amplitudes received from
LA–
LD are nearly equal when the secondary coil is aligned with the primary coil. This is because four signal coils are symmetric with respect to the secondary coil in this condition. In
Figure 16b, the secondary coil was moved 100 mm along the x axis. The voltage amplitudes received from
LB and
LC are increased while the voltage amplitudes received from
LA and
LD are decreased. In
Figure 16c, the secondary coil was moved 100 mm along the y axis. The voltage amplitudes received from
LA and
LB are increased while the voltage amplitudes received from
LC and
LD are decreased. In
Figure 16d, the secondary coil was moved 50 mm along z axis. The voltage amplitudes received from
LA–
LD are nearly equal once again due to the symmetry. However, the receiving amplitudes in
Figure 16d are smaller than those in
Figure 16a because the effective mutual inductances between the auxiliary signal coils and the secondary power coil are reduced.
In the condition of 3.3 kW power transfer, the power interference to the positioning amplitude measurement was tested, as shown in
Figure 17. In
Figure 17a, the power inverter output voltage
vp and current
ip are shown in CH1 and CH2, respectively. The positioning transmitting waveform
vLA and receiving waveform
vRX2 are both superimposed with a 85 kHz component. Since the 85 kHz component received by
LRX2 is much larger than the 5 MHz component, the 5MHz component nearly cannot be identified in the receiving waveform
vRX2 in
Figure 17a. However, in
Figure 17b, it can be seen that the small 5 MHz component can still be extracted through the analog switches and LPF, and transformed to 41 Hz sine wave, i.e.,
vsin2 and
vcos2. Meanwhile, the large 85 kHz power fundamental component has no effect on the waveforms of
vsin2 and
vcos2, which are sampled by DSP for amplitude calculation. Thus, the amplitude measurement is immune to the power fundamental interference, as analyzed in
Section 4. The online positioning is achieved. It should be noted that the power losses caused by the signal coils during online positioning can be neglected, since the signal coils are resonant with the compensation capacitor
CTX1 at 5 MHz, which forms a bandpass filter to greatly suppress the power carrier of 85 kHz.
The measured voltage amplitudes when the secondary coil moves along x axis, y axis, z axis and the linear track
y =
x are shown in
Figure 18a–d, respectively. The measurement is taken every 1-cm position change along x axis, y axis or z axis. The voltage amplitudes of |
VRX2(A)|–|
VRX2(D)| are represented by the digital values in DSP, which are calculated according to (31). The amplitude value at each position shown in
Figure 18 is the average value of 20 repeated measurements. In the measurement, the maximum amplitude variation due to the background noise is 9 in digital value. Thus, the digital amplitude change less than 9 will be deemed as noise, and cannot be used to distinguish position. In
Figure 18a, when
Δx2 ≥ 530 mm, the amplitude changes of |
VRX2(B)| and |
VRX2(C)| due to a 1-cm position change will be less than 9. When
Δx2 ≤ −530 mm, the amplitude changes of |
VRX2(A)| and |
VRX2(D)| due to 1-cm position change will be less than 9. In
Figure 18b, when
Δy2 ≥ 450 mm, the amplitude changes of |
VRX2(A)| and |
VRX2(B)| due to a 1-cm position change will be less than 9. When
Δy2 ≤ −450 mm, the amplitude changes of |
VRX2(C)| and |
VRX2(D)| due to a 1-cm position change will be less than 9. According to the amplitude change rule mentioned above, a conservative positioning region in the normal air gap condition (g = 160 mm) can be derived as a 1060 mm × 900 mm elliptical region. Inside this region, the positioning resolution can keep no lower than 1 cm. The results of air gap changing conditions are shown in
Figure 18c. The variation range of air gap is ± 100 mm. It can be seen that the positioning resolution along z axis can also keep no lower than 1 cm.
Figure 18d shows the results when the secondary coil moves along the linear track
y =
x in the normal air gap condition. Since
Δy2 is always equal to
Δx2 on the line
y =
x,
Figure 18d can be drawn in a two-dimensional plot, and
Δx2 is set as the horizontal axis. It can be seen that in the range |
Δx2| ≤ 350 mm, every 1-cm position change also can be distinguished.
In the positioning experiment, the lookup table method was used to derive the real-time position coordinate according to the measured amplitude vector. The lookup table that links the amplitude vector
(|
VRX2(A)|, |
VRX2(B)|, |
VRX2(C)|, |
VRX2(D)|) to the power coils’ relative coordinate
(
x12,
y12,
z12) was established by the initial calibration. In the calibration, the amplitude vector
was measured every 1-cm step along x, y and z axes in the whole positioning region, and then recorded together with the current coordinate
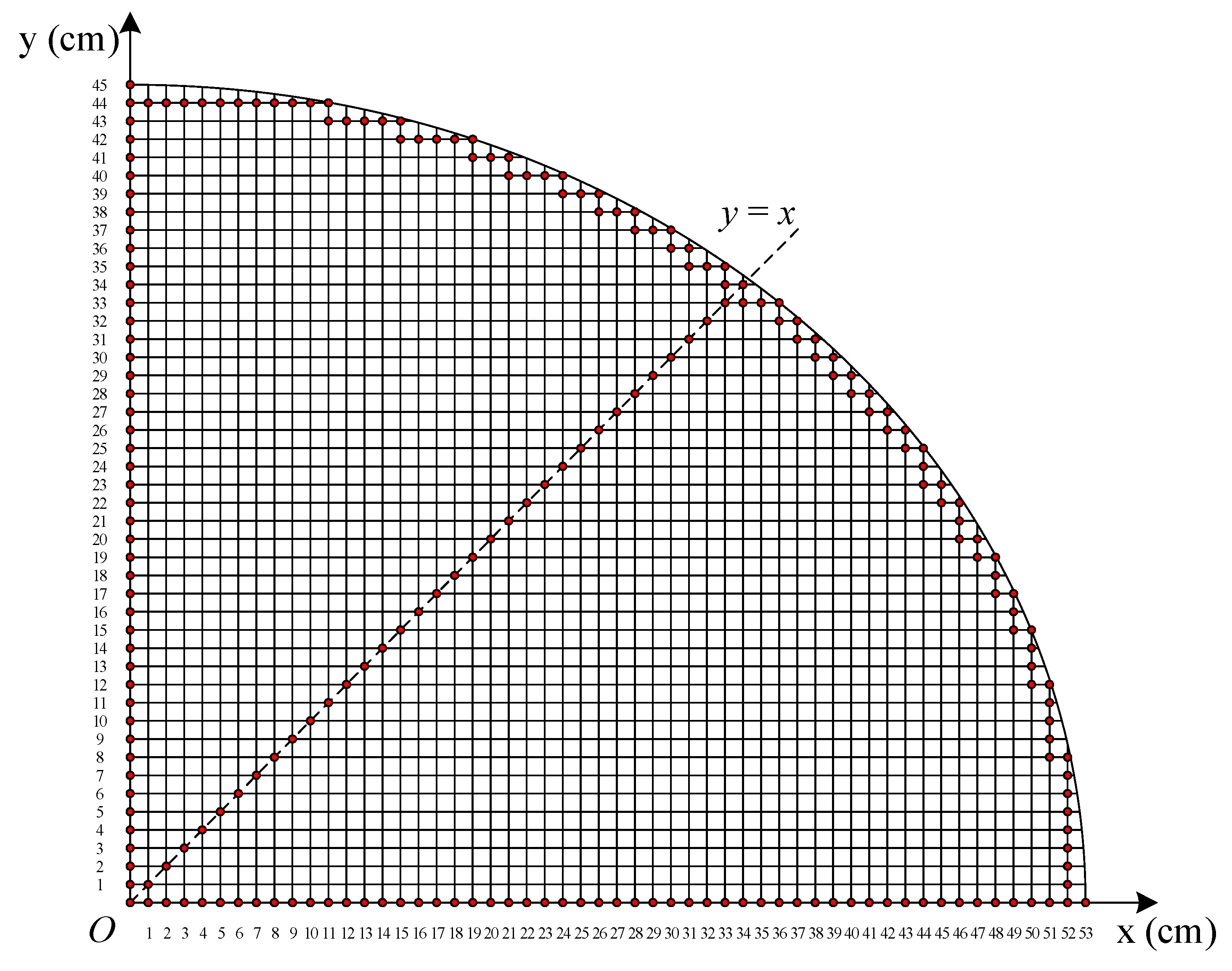
. After calibration, 227 horizontal positions under three air gap conditions, respectively 110 mm, 160 mm and 210 mm, were tested to verify the positioning accuracy. The 227 horizontal positions are marked by red points in
Figure 19, which include the positions on the outline of the quarter elliptical region and the positions on
y =
x. The minimum interval between these test points is 1 cm. Finally, all the coordinates of the total 681 test points were output accurately without error. The results show that the positioning accuracy of 1 cm is achieved.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}