Optimisation of Control Input Allocation Maps for Electric Vehicle Heat Pump-based Cabin Heating Systems



Abstract
1. Introduction
2. HVAC System Model
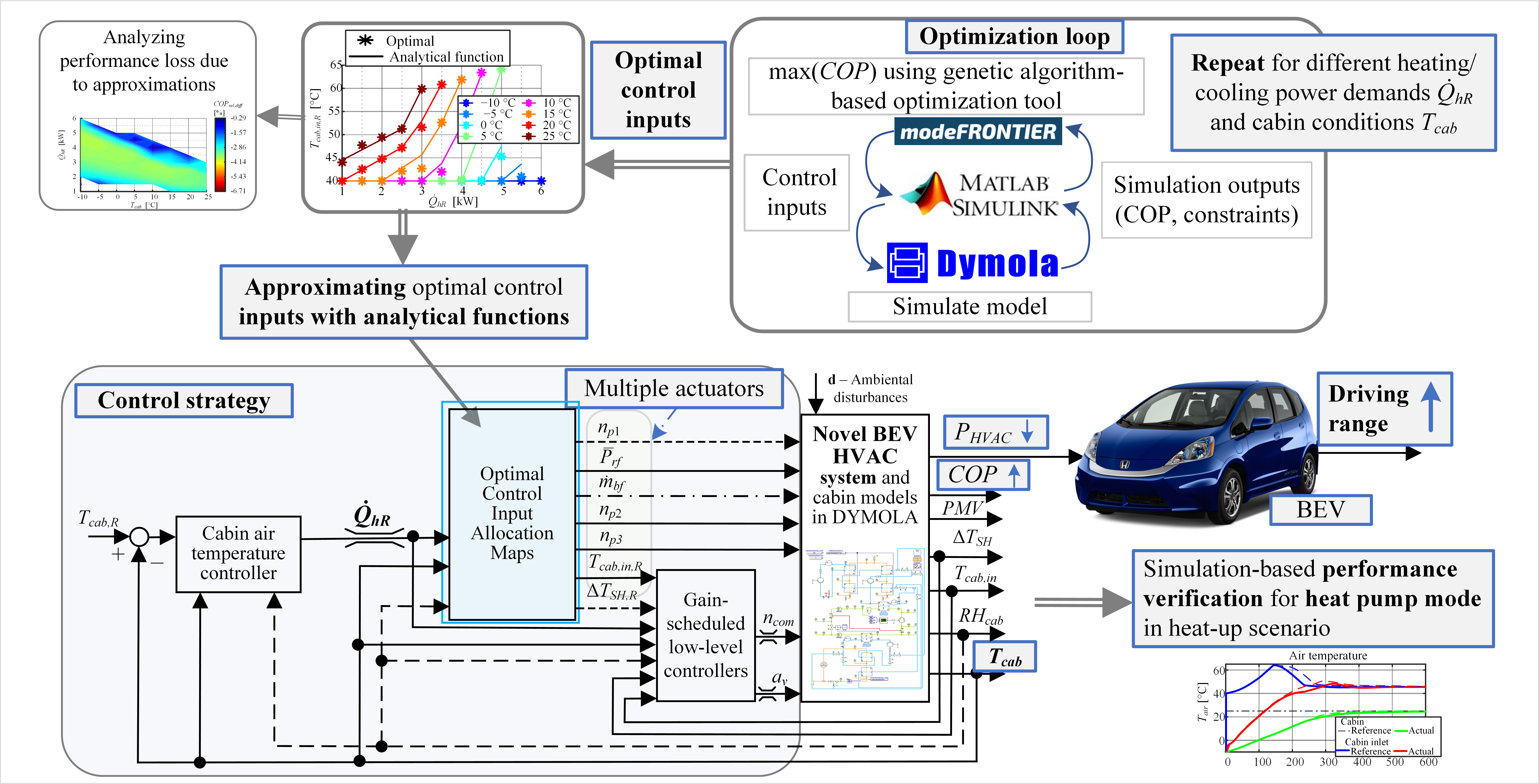
2.1. HVAC System Configuration
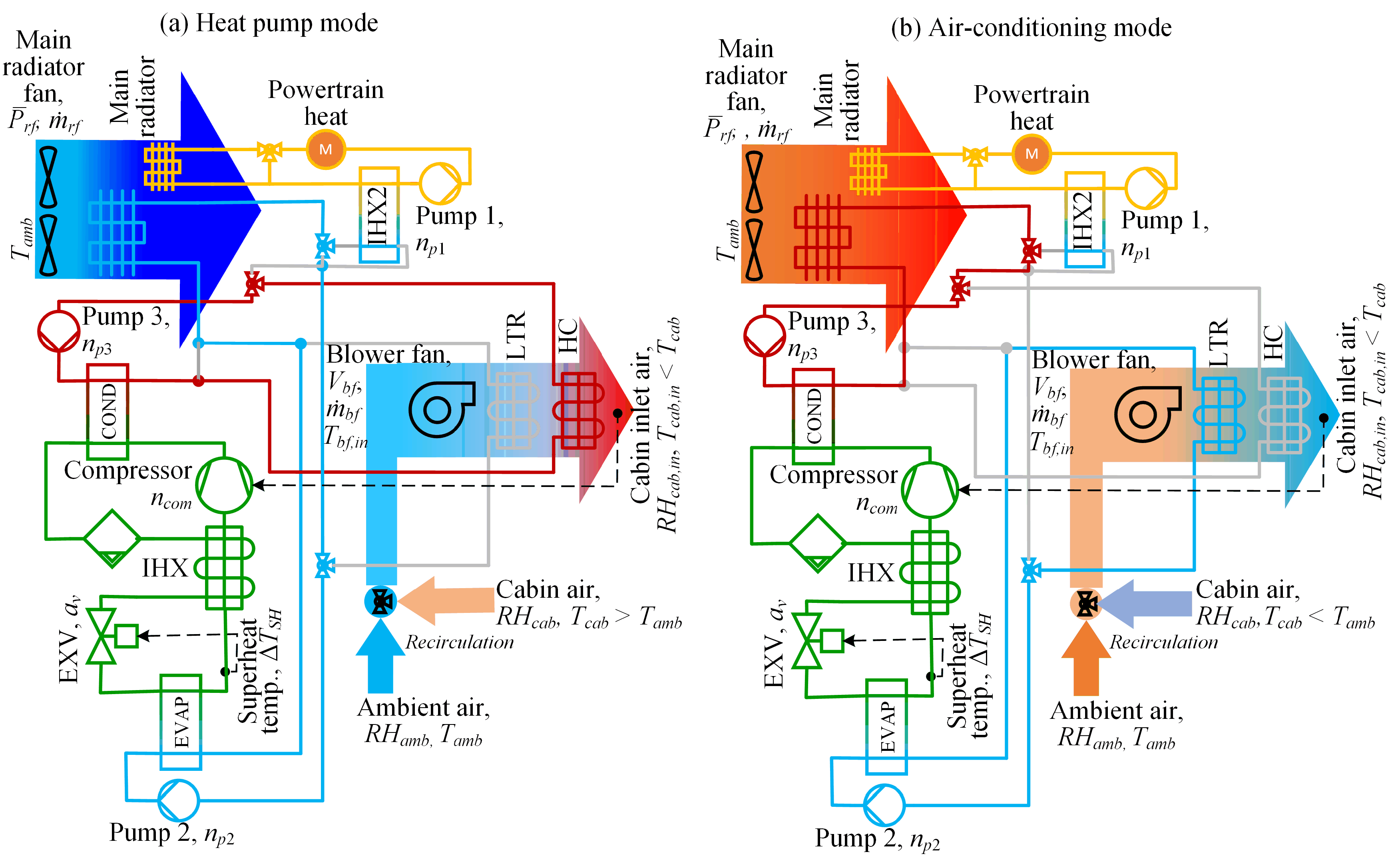
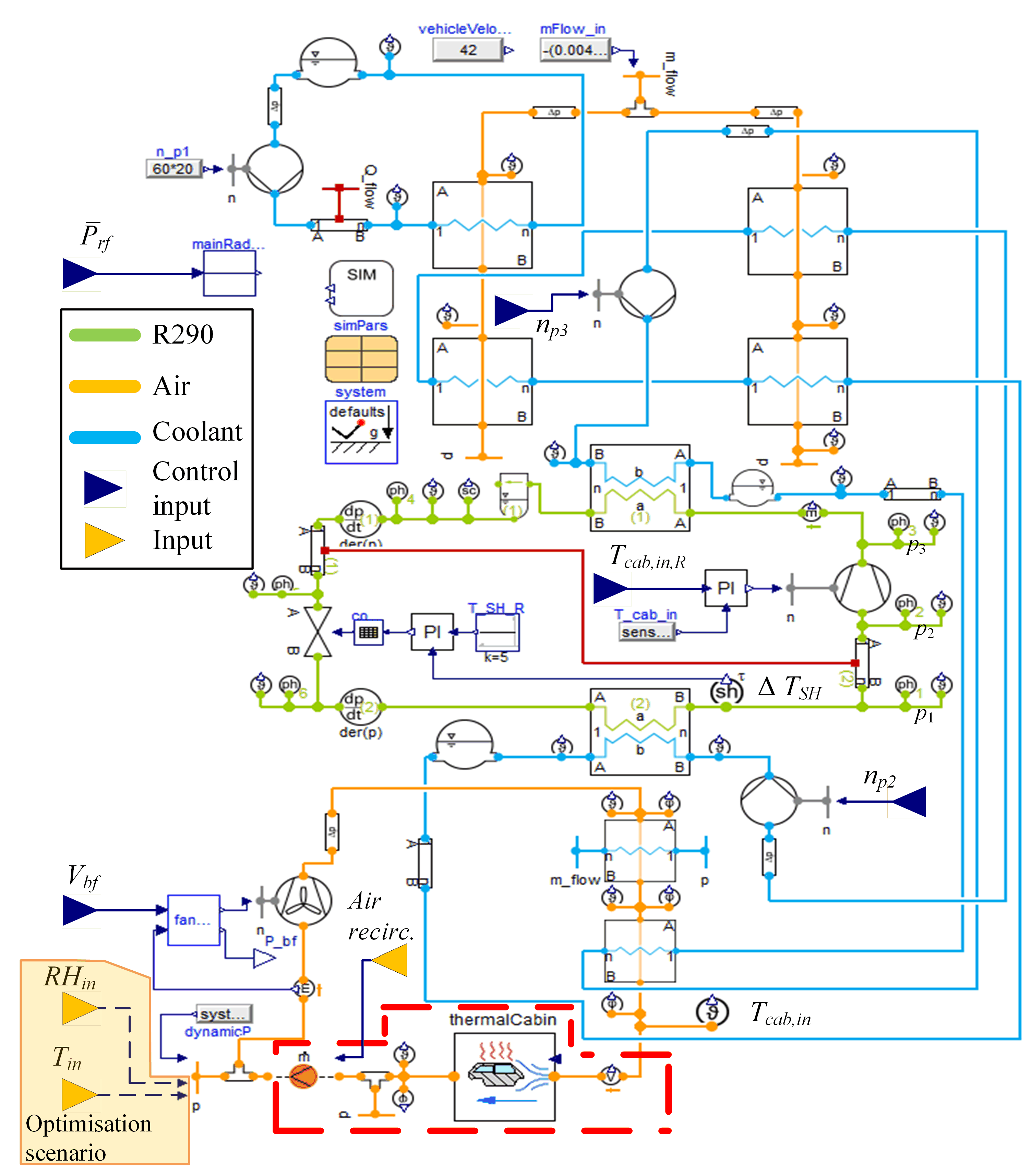
2.2. Heat pump (HP) Mode Simulation Model
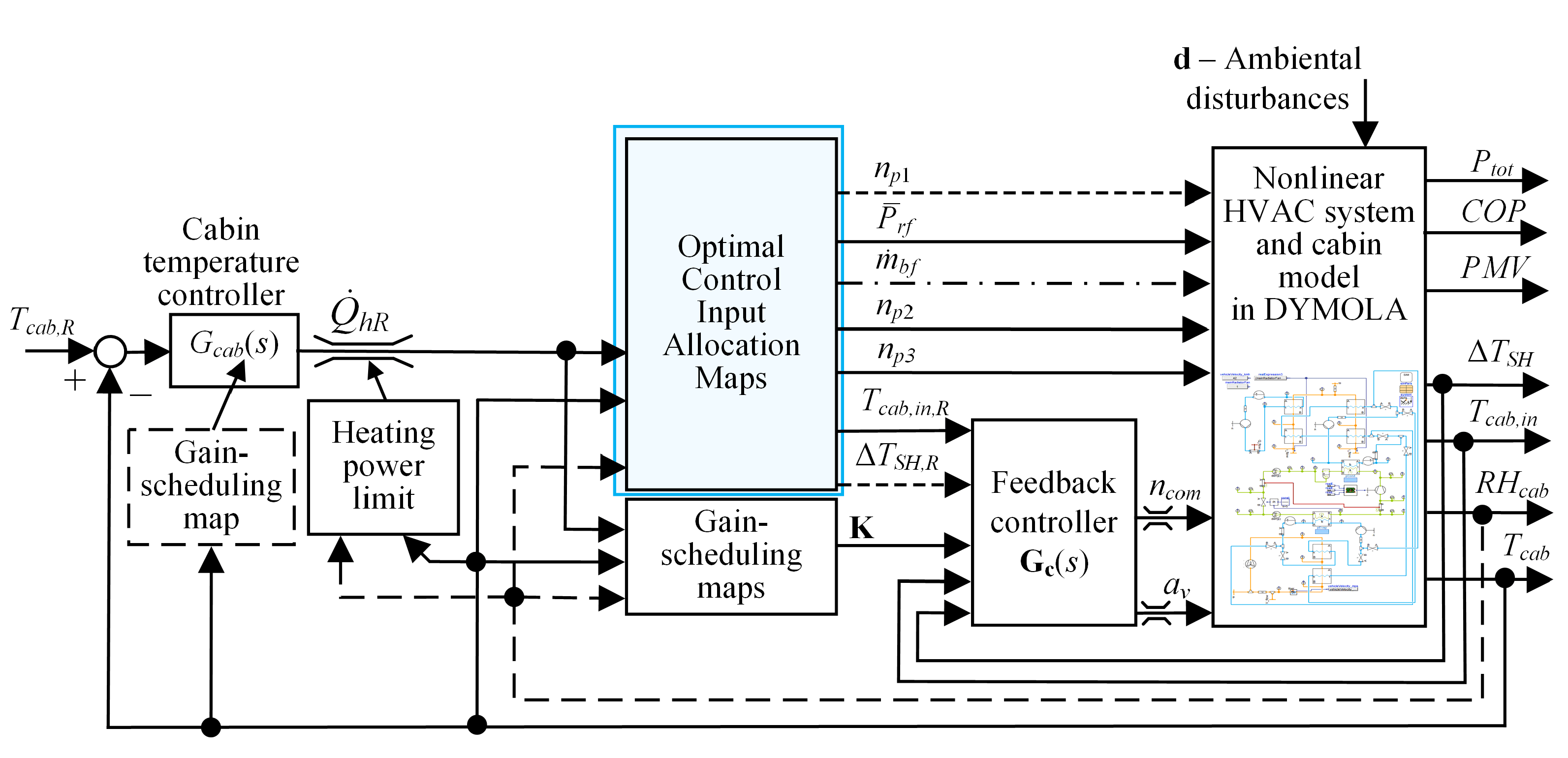
3. HVAC Control Framework
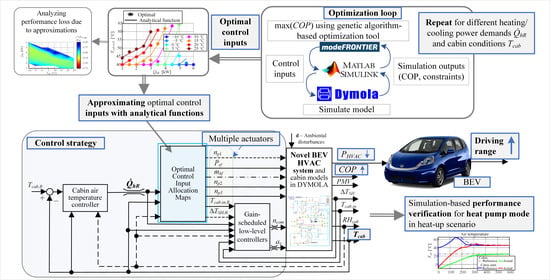
4. Control Input Optimisation Framework
4.1. Cabin Model Decoupling
4.2. Optimisation Problem
4.2.1. Cost Function
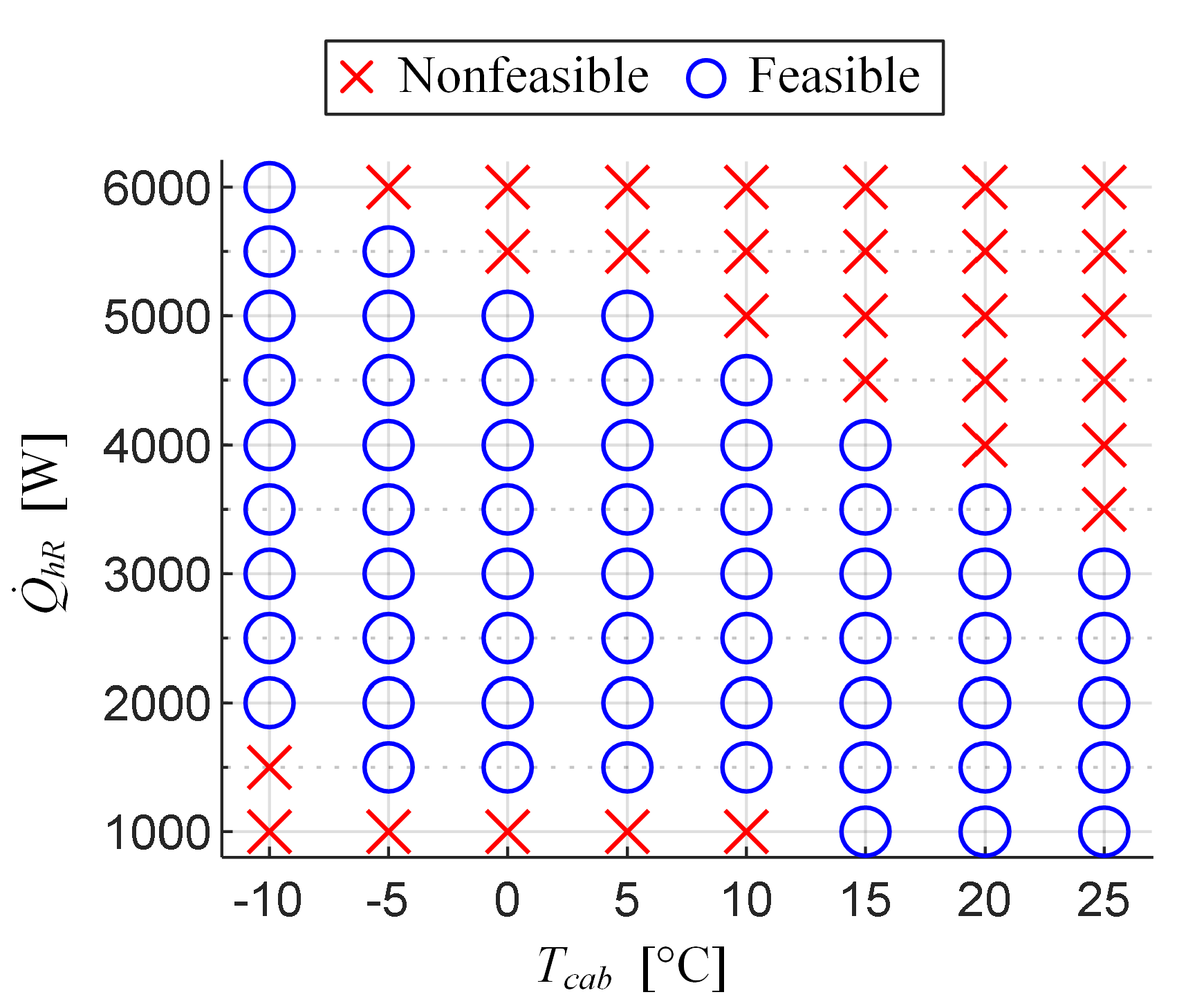
4.2.2. Constraints
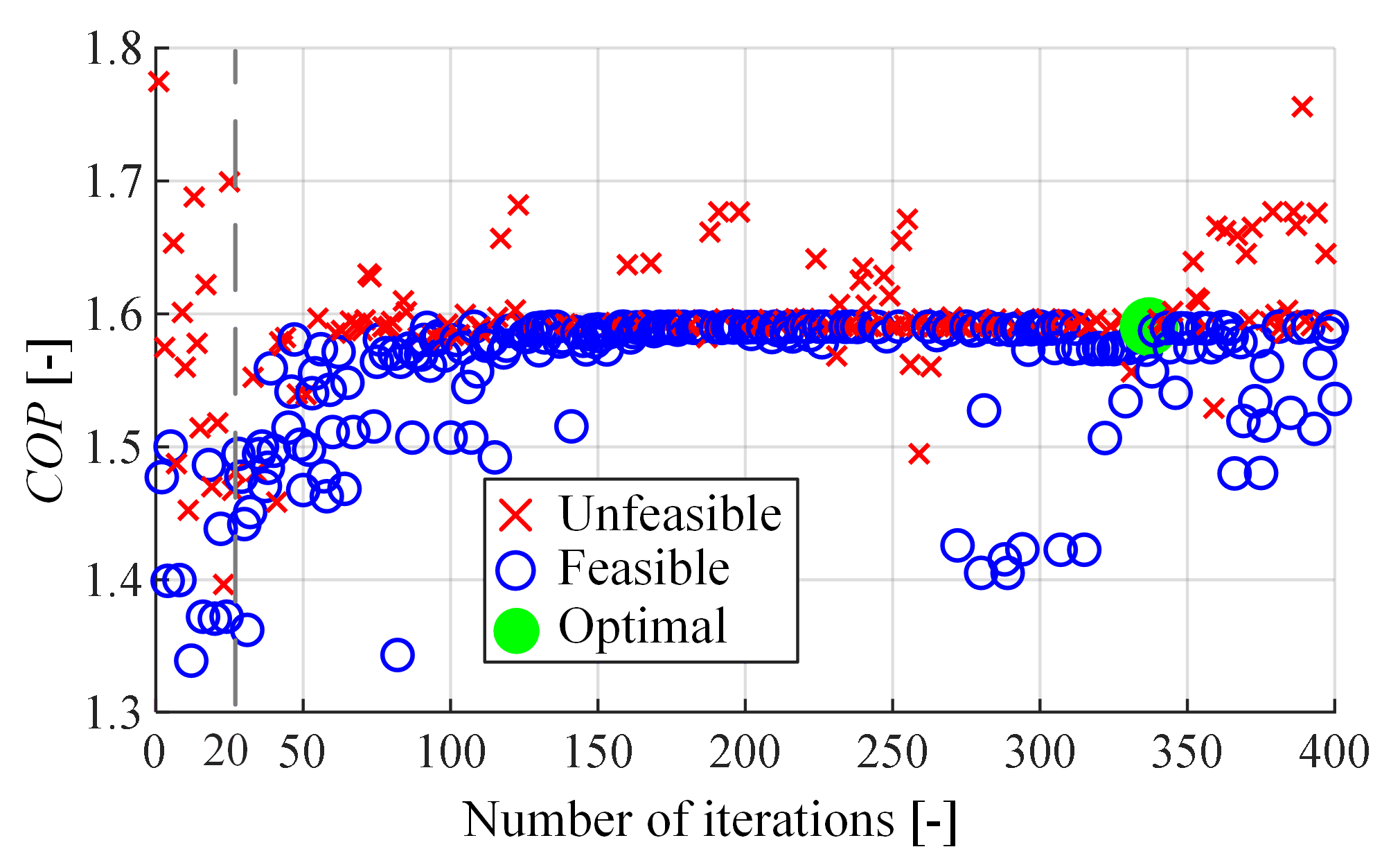
4.3. Optimisation Method
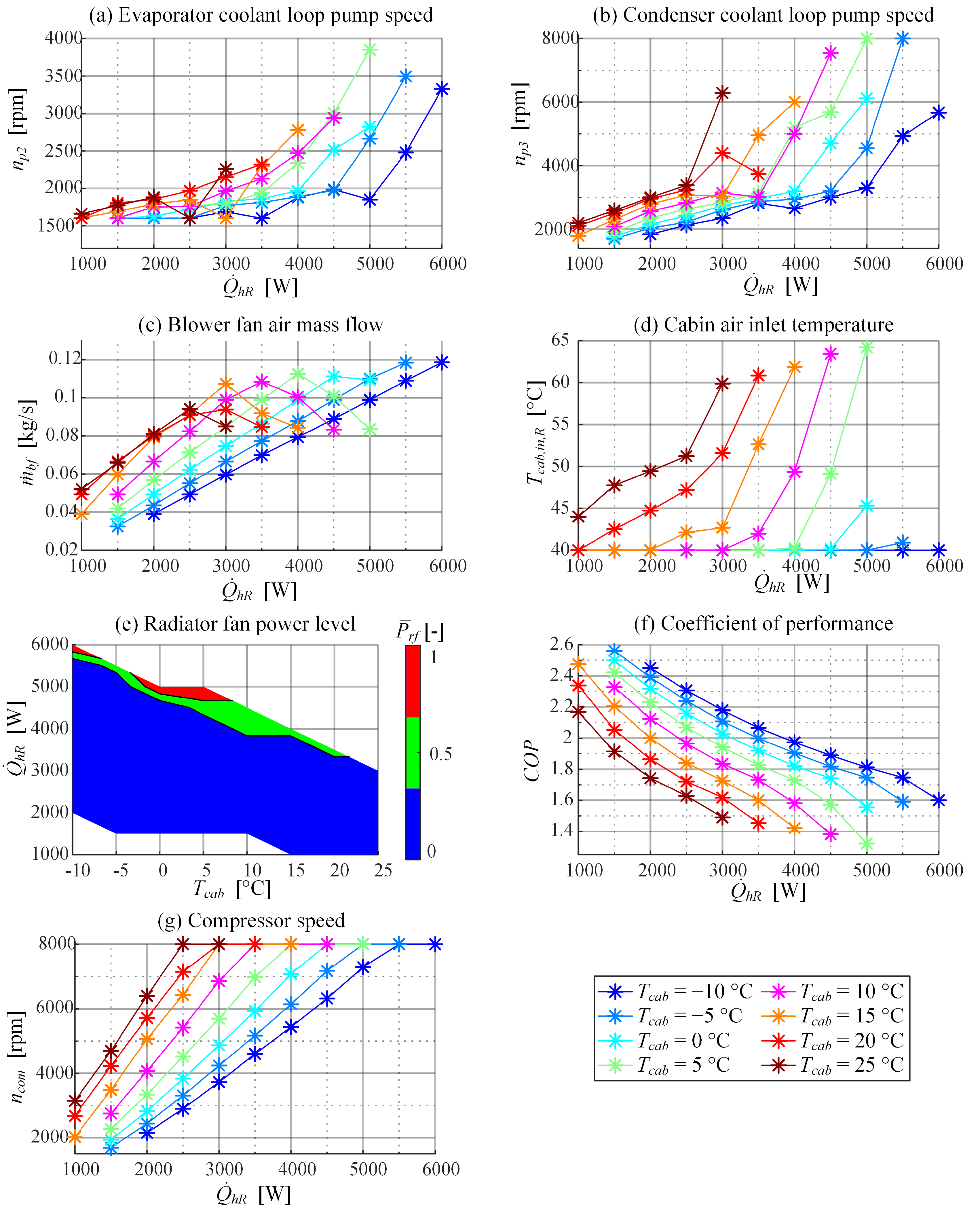
5. Optimisation Results and Control Input Allocation Mapping
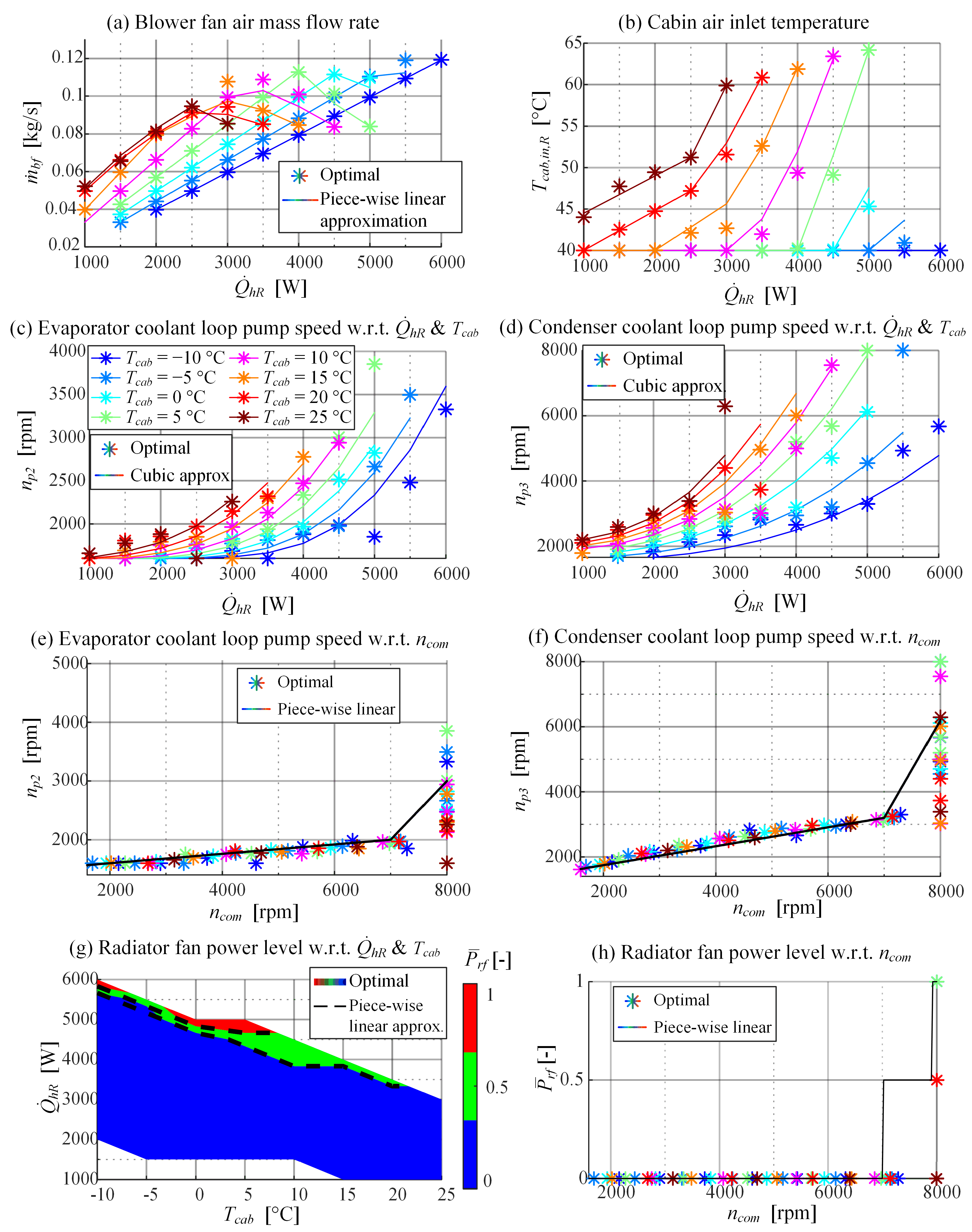
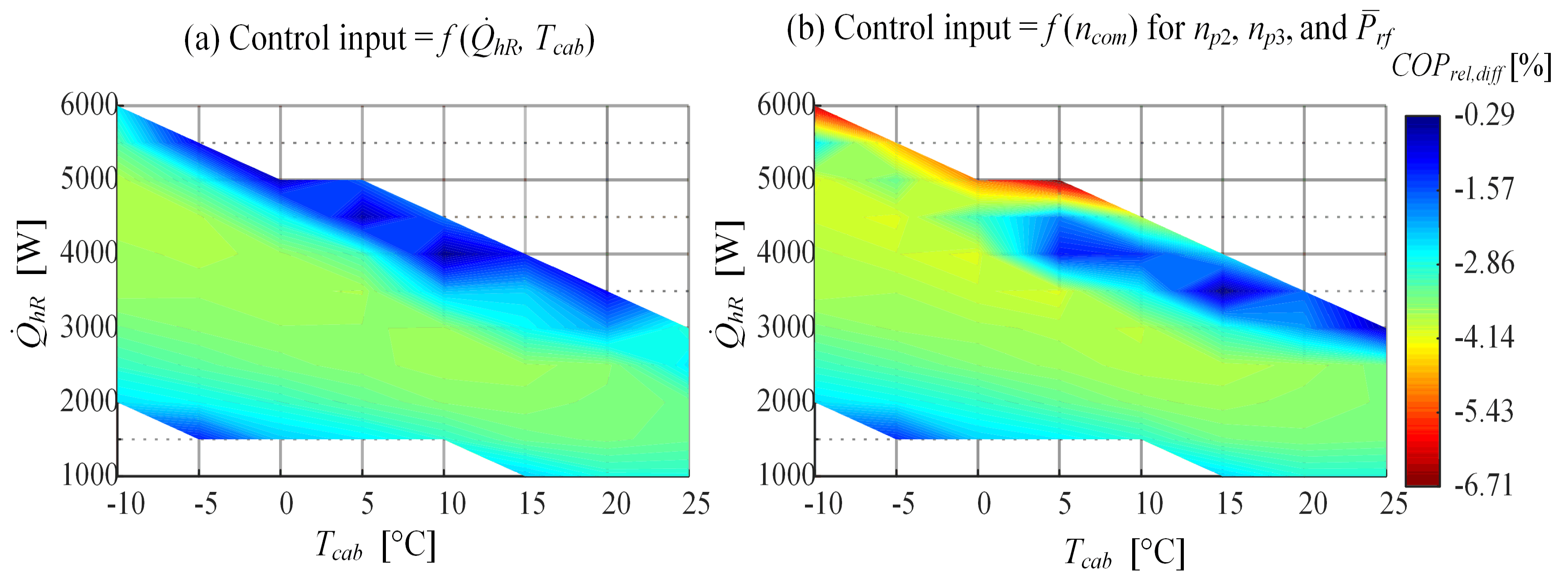
5.1. Optimisation Results
5.2. Approximation of Optimized Allocation Maps with Analytical Functions
6. Control Strategy Verification
6.1. Control Strategy Implementation within Dymola
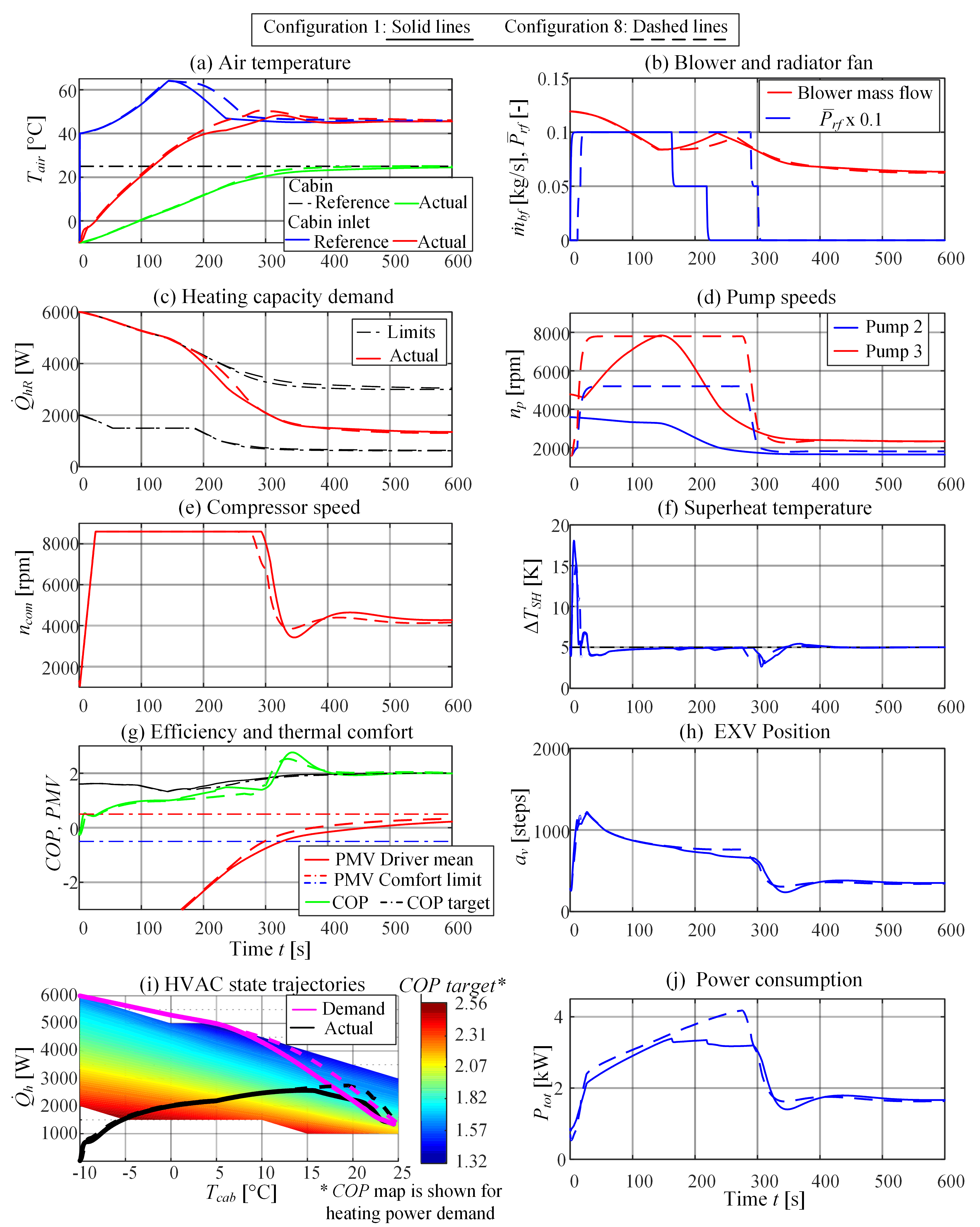
6.2. Simulation Results
- Energy consumed (Eel) during the heat-up scenario, which is inversely related to the efficiency.
- Time needed to reach the cabin inlet temperature of 40 °C (tin,40), which is related to the impact of control strategy on HVAC transient performance.
- Time needed to reach the cabin temperature of 22°C (tcab,22), which is related to the impact of strategy on cabin temperature transient performance.
- Two thermal comfort indices: (i) time to reach the comfortable range defined by |PMV| < 0.5 (tPMV,05), and (ii) integral of absolute value of PMV in uncomfortable range C2 [min] = ∫|PMV|/60 dt, if |PMV| > 0.5 [21].
7. Discussion
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
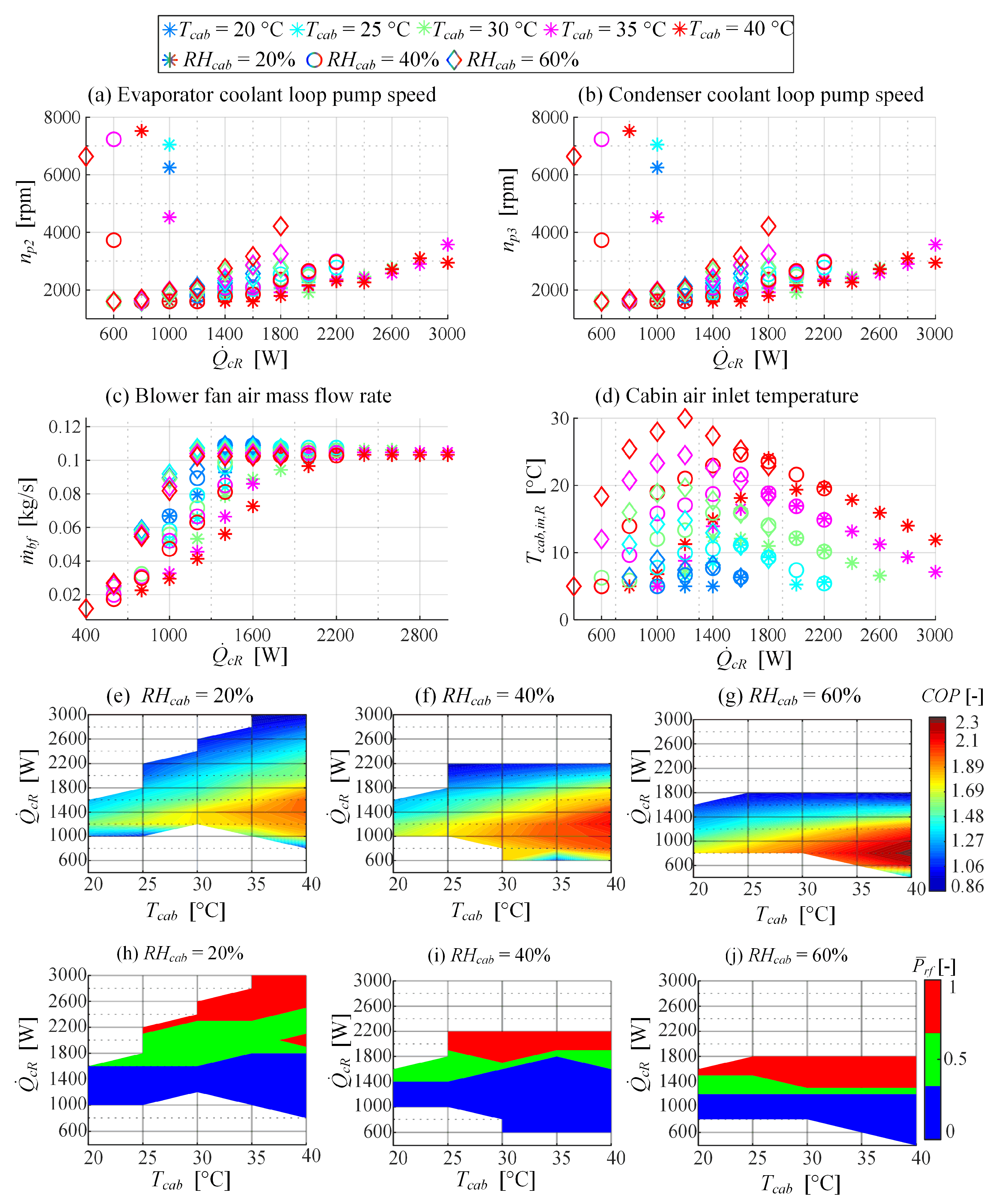
- The air recirculation is set to 100% (see Section 2), where the cabin air is directly fed to the blower input. This means that the blower fan inlet air temperature and the relative humidity correspond to the cabin air conditions, i.e., Tin = Tcab and RHin = RHcab.
- The COP calculation in the A/C mode accounts for both sensible heat and latent heat due to dehumidification effect.
- The lower limit of cabin inlet air temperature is set to 5 °C, while the upper limit is equated with the cabin air temperature to prevent heating, i.e., 5 °C < Tcab,in,R < Tcab.
- The control inputs are allocated with respect to three inputs: the cooling power demand Q̇cR, the cabin air temperature Tcab and the cabin relative humidity RHcab where the latter is relevant in the A/C mode due to the dehumidification effect (which has not been present in HP mode).

References
- Council of the European Union. Council Decision (EU) 2017/710 of 3 April 2017 on the position to be adopted, on behalf of the European Union, within the EEA Joint Committee concerning an amendment to Annex XX (Environment) to the EEA Agreement (CO2 Emissions). 2017. Available online: https://eur-lex.europa.eu/eli/dec/2017/710/oj (accessed on 23 June 2020).
- Yang, D.X.; Qiu, L.S.; Yan, J.J.; Chen, Z.Y.; Jiang, M. The government regulation and market behavior of the new energy automotive industry. J. Clean. Prod. 2019, 210, 1281–1288. [Google Scholar] [CrossRef]
- Park, M.H.; Kim, S.C. Heating performance characteristics of high-voltage PTC heater for an electric vehicle. Energies 2017, 10, 1494. [Google Scholar] [CrossRef]
- Pouladi, J.; Bannae Sharifian, M.B.; Soleymani, S. Determining charging load of PHEVs considering HVAC system and analyzing its probabilistic impacts on residential distribution network. Electr. Power Syst. Res. 2016, 141, 300–312. [Google Scholar] [CrossRef]
- Vatanparvar, K.; Al Faruque, M.A. Battery lifetime-aware automotive climate control for electric vehicles. In Proceedings of the. 2015 52nd ACM/EDAC/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 8–12 June 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, T.; Gao, C.; Gao, Q.; Wang, G.; Liu, M.H.; Guo, Y.; Xiao, C.; Yan, Y.Y. Status and development of electric vehicle integrated thermal management from BTM to HVAC. Appl. Eng. 2015, 88, 398–409. [Google Scholar] [CrossRef]
- Paffumi, E.; Otura, M.; Centurelli, M.; Casellas, R.; Brenner, A.; Jahn, S. Energy consumption, driving range and cabin temperature performances at different ambient conditions in support to the design of a user-centric efficient electric vehicle: The QUIET Project. In Proceedings of the 14th SDEWES Conference, Dubrovnik, Croatia, 1–6 October 2019; p. 18. Available online: https://www.quiet-project.eu/wp-content/uploads/2020/07/JRC-DirC_Paffumi_et_al_final_SDEWES2019.pdf (accessed on 13 July 2020).
- Zhang, Z.; Wang, J.; Feng, X.; Chang, L.; Chen, Y.; Wang, X. The solutions to electric vehicle air conditioning systems: A review. Renew. Sustain. Energy Rev. 2018, 91, 443–463. [Google Scholar] [CrossRef]
- Feng, L.; Hrnjak, P. Performance characteristics of a mobile heat pump system at low ambient temperature. SAE Tech. Pap. 2018. [Google Scholar] [CrossRef]
- Peng, Q.; Du, Q. Progress in heat pump air conditioning systems for electric vehicles—A review. Energies 2016, 9, 240. [Google Scholar] [CrossRef]
- Qi, Z. Advances on air conditioning and heat pump system in electric vehicles—A review. Renew. Sustain. Energy Rev. 2014, 38, 754–764. [Google Scholar] [CrossRef]
- Okamoto, K.; Aikawa, H.; Ohmikawa, M.; Hayashi, K. Thermal management of a hybrid vehicle using a heat pump. SAE Tech. Pap. 2019. [Google Scholar] [CrossRef]
- Menken, J.C.; Strasser, K.; Anzenberger, T.; Rebinger, C. Evaluation of the energy consumption of a thermal management system of a plug-in hybrid electric vehicle using the example of the Audi Q7 e-tron. SAE Int. J. Passeng. Cars Mech. Syst. 2018, 11, 203–212. [Google Scholar] [CrossRef]
- Chowdhury, S.; Leitzel, L.; Zima, M.; Santacesaria, M.; Titov, G.; Lustbader, J.; Rugh, J.; Winkler, J.; Khawaja, A.; Govindarajalu, M. Total Thermal management of battery electric vehicles (BEVs). SAE Tech. Pap. 2018. [Google Scholar] [CrossRef]
- Nissan Motor Corporation. Heat-Pump Cabin Heater. Available online: https://www.nissan-global.com/EN/TECHNOLOGY/OVERVIEW/heat_pump_cabin_heater.html (accessed on 20 June 2020).
- Mancini, N.; Joseph, S.; Maxwell Mardall, J.S.; Kopitz, J.; Raymond, C.; O’Donnell, E.; Hanks, D.F.; Li, H. Optimal source electric vehicle heat pump with extreme temperature heating capability and efficient thermal. preconditioning. Patent No. US20190070924A1, 3 July 2019. Available online: https://patents.google.com/patent/US20190070924A1/ (accessed on 25 June 2020).
- Porsche, A.G. The Technology Behind the New Porsche Taycan. Available online: https://newsroom.porsche.com/dam/jcr:93483663-c12b-43ca-98f5-b1b8b845e321/PAG_Taycan_Technology_PM_EN.pdf.PDF (accessed on 20 June 2020).
- Drage, P.; Hinteregger, M.; Zotter, G.; Šimek, M. Cabin conditioning for electric vehicles. ATZ Worldw. 2019, 121, 44–49. [Google Scholar] [CrossRef]
- Bauml, T.; Dvorak, D.; Frohner, A.; Simic, D. Simulation and measurement of an energy efficient infrared radiation heating of a full electric vehicle. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Khayyam, H.; Kouzani, A.Z.; Hu, E.J.; Nahavandi, S. Coordinated energy management of vehicle air conditioning system. Appl. Eng. 2011, 31, 750–764. [Google Scholar] [CrossRef]
- Cvok, I.; Škugor, B.; Deur, J. Control trajectory optimisation and optimal control of an electric vehicle HVAC system for favourable efficiency and thermal comfort. Optim. Eng. 2020. [Google Scholar] [CrossRef]
- Amini, M.R.; Wang, H.; Gong, X.; Liao-McPherson, D.; Kolmanovsky, I.; Sun, J. Cabin and battery thermal management of connected and automated hevs for improved energy efficiency using hierarchical model predictive control. IEEE Trans. Control. Syst. Technol. 2020, 28, 1711–1726. [Google Scholar] [CrossRef]
- De Nunzio, G.; Sciarretta, A.; Steiner, A.; Mladek, A. Thermal management optimization of a heat-pump-based HVAC system for cabin conditioning in electric vehicles. In Proceedings of the 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, France, 4 October 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Cvok, I.; Ratkovic, I.; Deur, J. Optimization of control parameters of vehicle air-conditioning system for maximum efficiency. SAE Tech. Pap. 2020. [Google Scholar] [CrossRef]
- Zhang, Q.; Meng, Y.; Greiner, C.; Soto, C.; Schwartz, W.; Jennings, M. Air conditioning system performance and vehicle fuel economy trade-offs for a hybrid electric vehicle. SAE Tech. Pap. 2017. [Google Scholar] [CrossRef]
- Dvorak, D.; Šimić, D. Model-based Design of an HVAC Control Strategy. In Proceedings of the 14th Conference on Sustainable Development of Energy, Water and Environment Systems (SDEWES), Dubrovnik, Croatia, 1–6 October 2019; Available online: https://www.quiet-project.eu/wp-content/uploads/2020/07/SDEWES2019_AIT_hvac-optimization.pdf (accessed on 13 July 2020).
- Basciotti, D.; Dvorak, D.; Gellai, I. A novel methodology for evaluating the impact of energy efficiency measures on the cabin thermal comfort of electric vehicles. Energies 2020, 13, 3872. [Google Scholar] [CrossRef]
- ASHRAE. ASHRAE Hanbook—Fundamentals; ASHRAE: Atlanta, GA, USA, 2017; ISBN 1939200598. [Google Scholar]
- Poles, S. MOGA-II an Improved Multi-Objective Genetic Algorithm; Technical Report; Esteco: Trieste, Italy, 2003. [Google Scholar]
- Esteco. Mode Frontier Software. Available online: https://www.esteco.com/modefrontier (accessed on 20 June 2020).
- Jeffs, J.; McGordon, A.; Picarelli, A.; Robinson, S.; Widanage, W.D. System level heat pump model for investigations into thermal management of electric vehicles at low temperatures. In Proceedings of the 13th International Modelica Conference, Regensburg, Germany, 4–6 March 2019; pp. 107–116. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Input Constraints | Setpoint Tracking Constraints |
|---|---|
| Parameter | Value |
|---|---|
| Heating power demand grid | Q̇hR ∈ {1:0.5:6} kW |
| Cabin air temperature grid | Tcab ∈ {−10:5:25} °C |
| Ambient conditions | Ta = −10 °C, RHa = 60%, pa = 101.3 kPa |
| Vehicle velocity | vveh = 60 km/h |
| Model execution time * | 8.2–10.3 s |
| GA iteration duration * | 9.57–12.8 s |
| Dassl solver tolerance | 0.0001 |
| Conf. | TI [s] | Pump Speeds | Radiator Fan | Eel [Wh] | tin,40 [s], | tcab,22 [s] | tPMV,05 [s] | C2 [min] |
|---|---|---|---|---|---|---|---|---|
| 1 | 240 | Q̇hR & Tcab | Q̇hR & Tcab | 385 (+0%) | 205 | 334 | 326 | 17.07 |
| (−0%) | (−0%) | (−0%) | (−0%) | |||||
| 2 | 240 | Q̇hR & Tcab | ncom | 390 (+1.1%) | 204 | 329 | 321 | 16.99 |
| (−0.5%) | (−1.5%) | (−1.4%) | (−0.4%) | |||||
| 3 | 240 | ncom | Q̇hR & Tcab | 395 | 196 | 326 | 316 | 16.66 |
| (+2.5%) | (−4.4%) | (−2.4%) | (−3.1%) | (−2.4%) | ||||
| 4 | 240 | ncom | ncom | 398 | 195 | 322 | 312 | 16.59 |
| (+3.4%) | (−4.9%) | (−3.3%) | (−4.1%) | (−2.8%) | ||||
| 5 | 180 | Q̇hR & Tcab | Q̇hR & Tcab | 400 | 195 | 311 | 311 | 16.88 |
| (+4.0%) | (−4.9%) | (−6.9%) | (−4.6%) | (−1.1%) | ||||
| 6 | 180 | Q̇hR & Tcab | ncom | 404 | 195 | 308 | 308 | 16.83 |
| (+5.0%) | (−4.9%) | (−7.8%) | (−5.5%) | (−1.4%) | ||||
| 7 | 180 | ncom | Q̇hR & Tcab | 410 | 190 | 300 | 300 | 16.51 |
| (+6.5%) | (−7.3%) | (−9.9%) | (−7.8%) | (−3.3%) | ||||
| 8 | 180 | ncom | ncom | 414 | 189 | 298 | 298 | 16.46 |
| (+7.3%) | (−7.8%) | (−10.8%) | (−8.4%) | (−3.6%) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cvok, I.; Ratković, I.; Deur, J. Optimisation of Control Input Allocation Maps for Electric Vehicle Heat Pump-based Cabin Heating Systems. Energies 2020, 13, 5131. https://doi.org/10.3390/en13195131
Cvok I, Ratković I, Deur J. Optimisation of Control Input Allocation Maps for Electric Vehicle Heat Pump-based Cabin Heating Systems. Energies. 2020; 13(19):5131. https://doi.org/10.3390/en13195131
Chicago/Turabian StyleCvok, Ivan, Igor Ratković, and Joško Deur. 2020. "Optimisation of Control Input Allocation Maps for Electric Vehicle Heat Pump-based Cabin Heating Systems" Energies 13, no. 19: 5131. https://doi.org/10.3390/en13195131
APA StyleCvok, I., Ratković, I., & Deur, J. (2020). Optimisation of Control Input Allocation Maps for Electric Vehicle Heat Pump-based Cabin Heating Systems. Energies, 13(19), 5131. https://doi.org/10.3390/en13195131