A Proposal for an MPPT Algorithm Based on the Fluctuations of the PV Output Power, Output Voltage, and Control Duty Cycle for Improving the Performance of PV Systems in Microgrid

 ,
,  and
and
Abstract
1. Introduction
- Simplicity in implementation because of the fundamental measured parameters (, , and );
- Accuracy and almost no oscillation around the MPP during tracking and steady-state operations;
- The necessary requirements of an MPPT technique are achievable by using only a low-cost controller due to the simplicity of the proposed algorithm;
- Unaffected by the fixed perturbation value (increment size of the duty cycle) for a wide range of this parameter.
2. Review of MPPT Algorithms
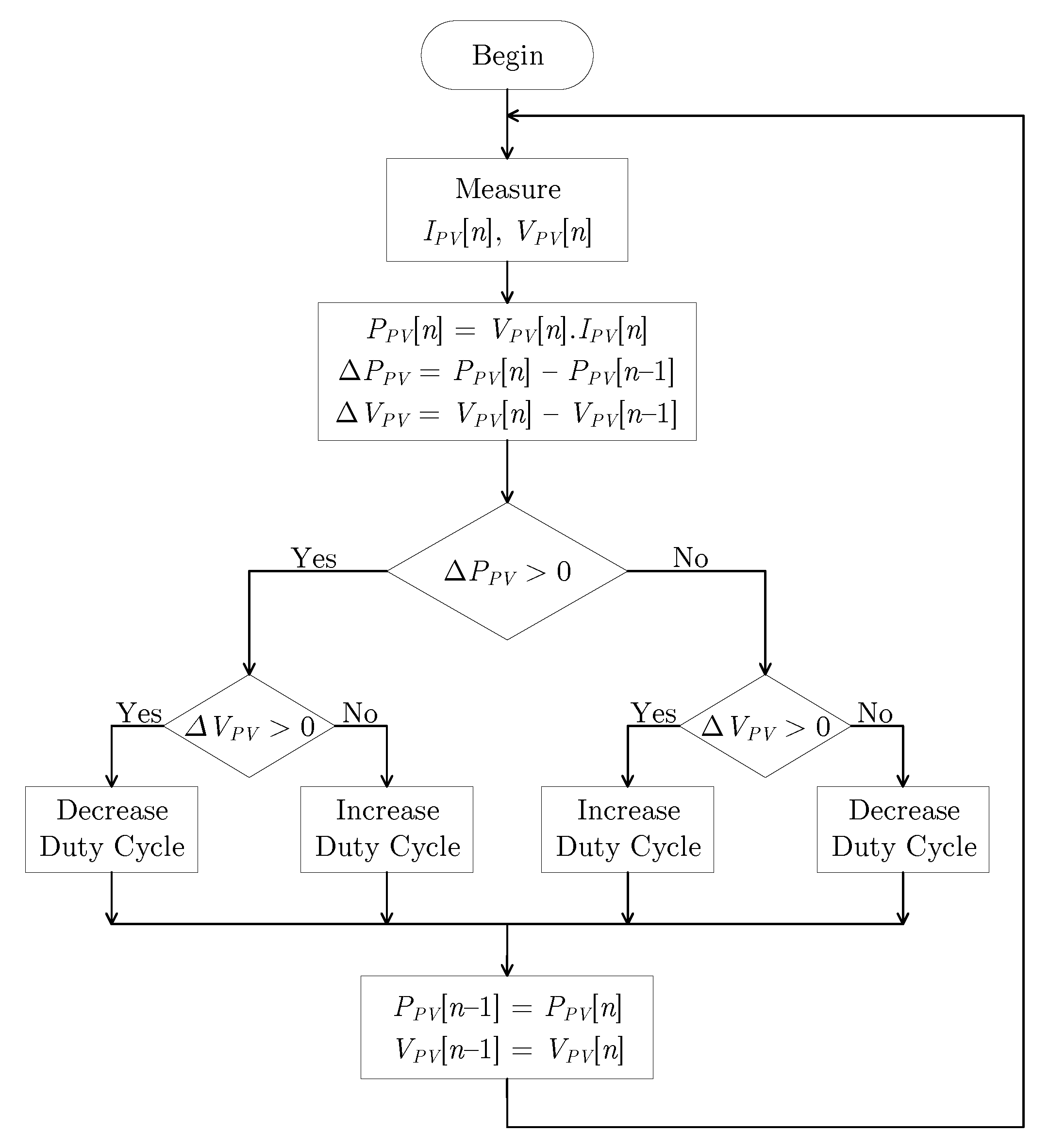
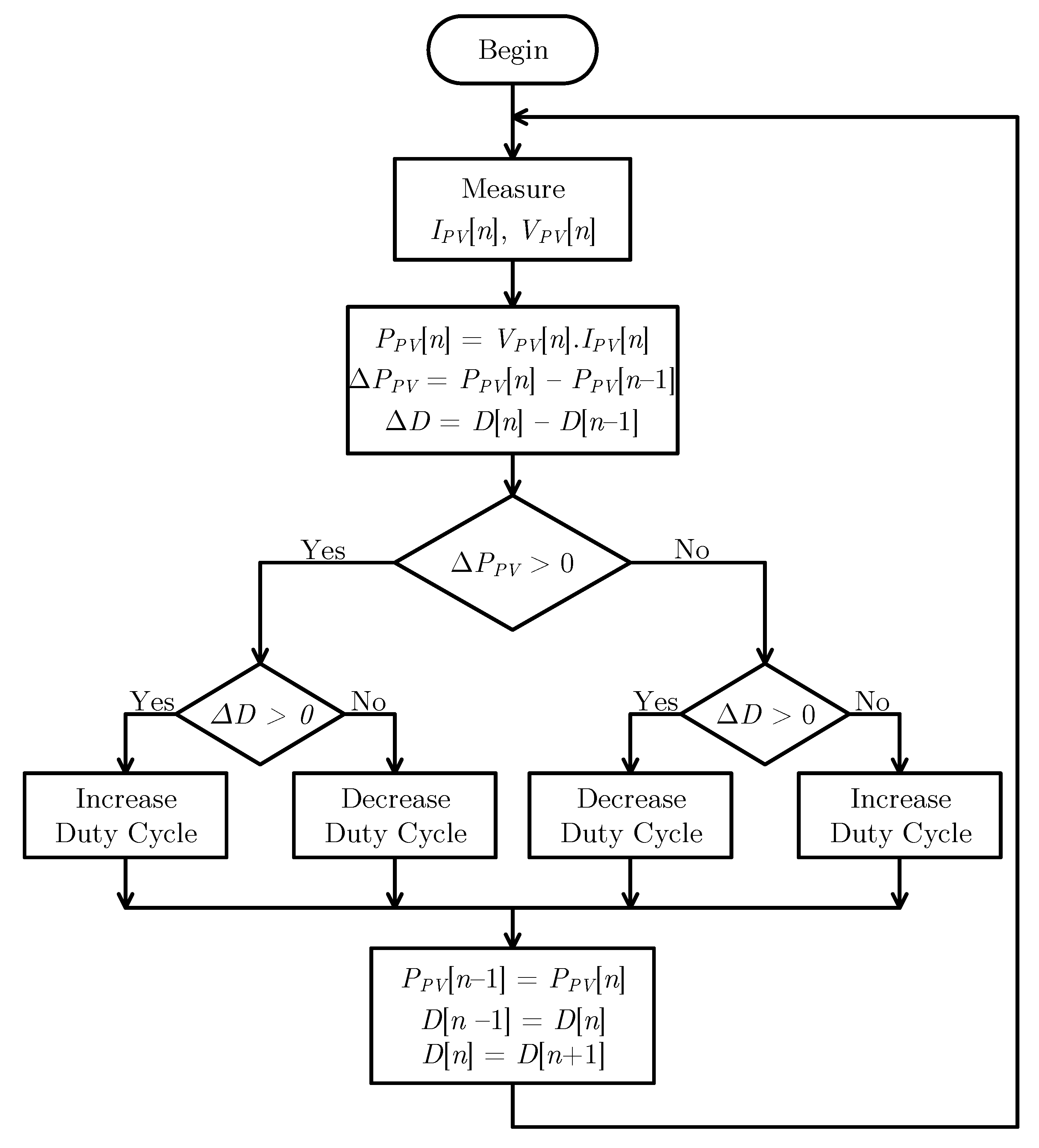
2.1. Perturb and Observe Algorithm
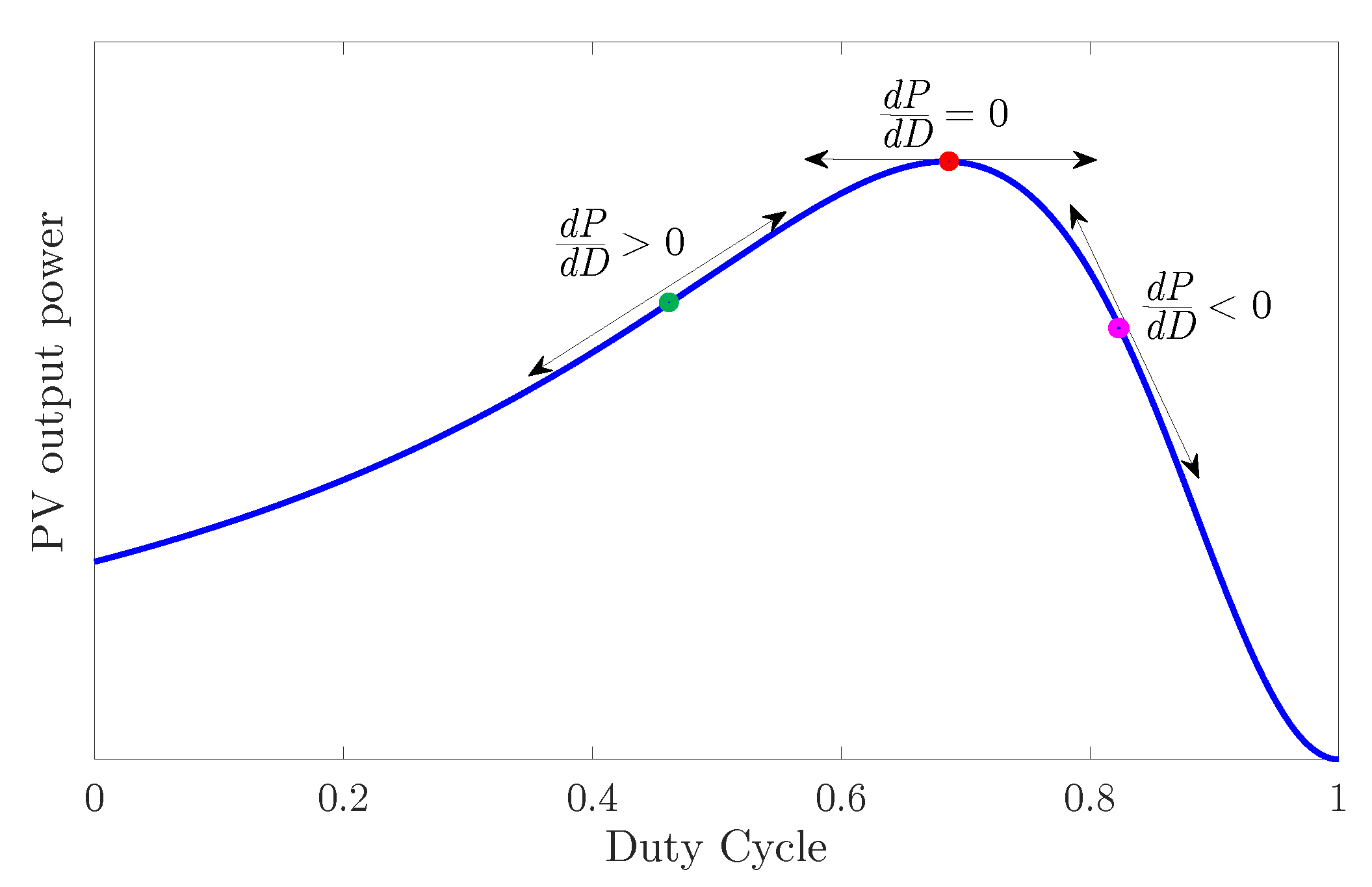
2.2. Hill Climbing Algorithm
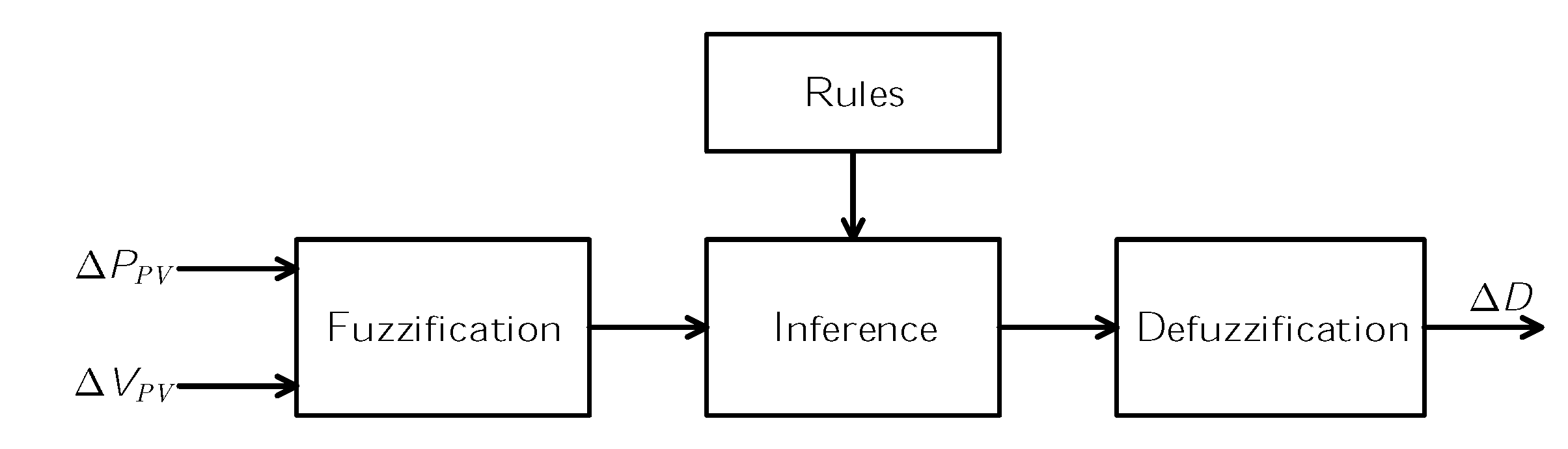
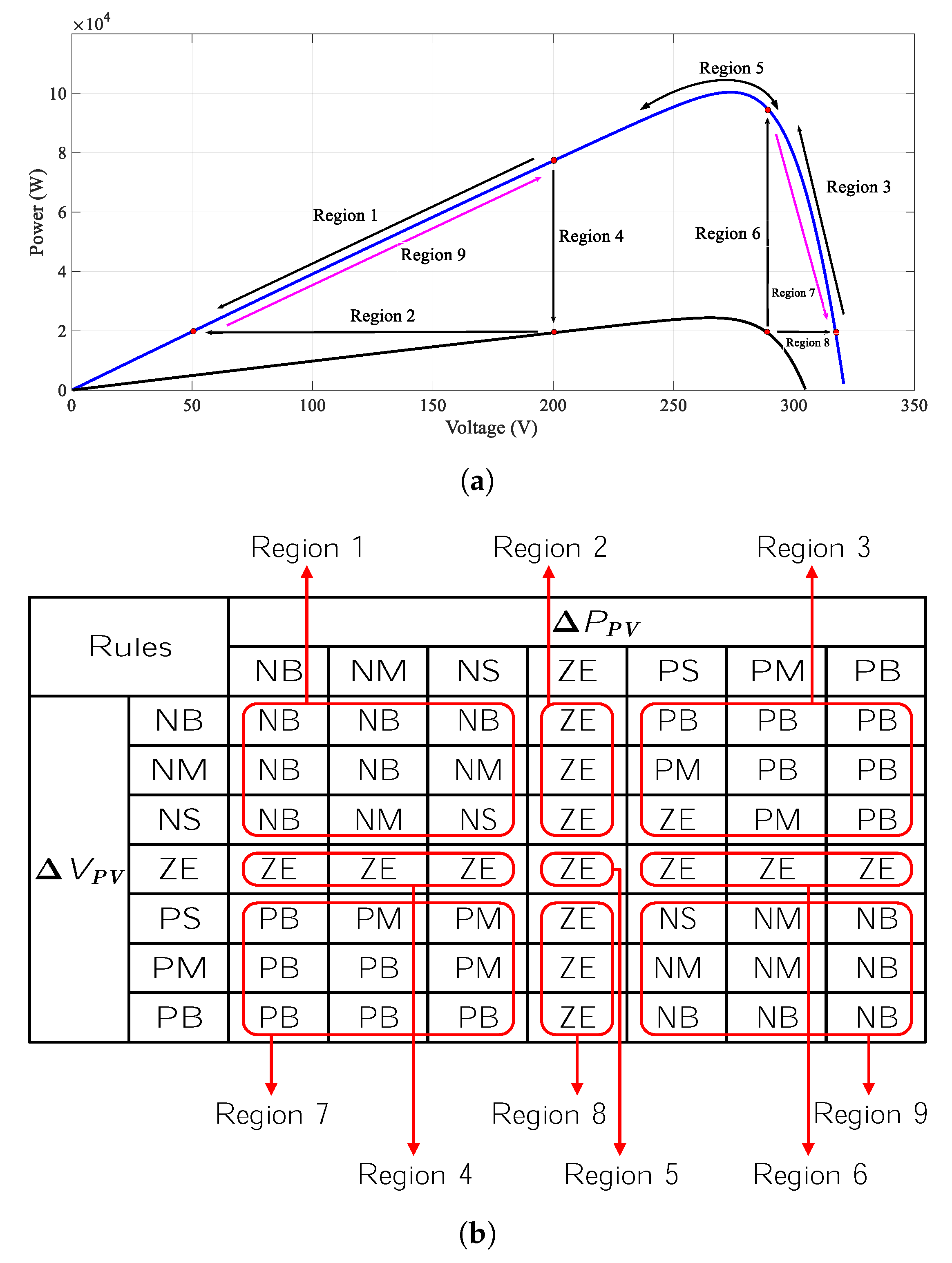
2.3. Fuzzy Logic Based MPPT Algorithm
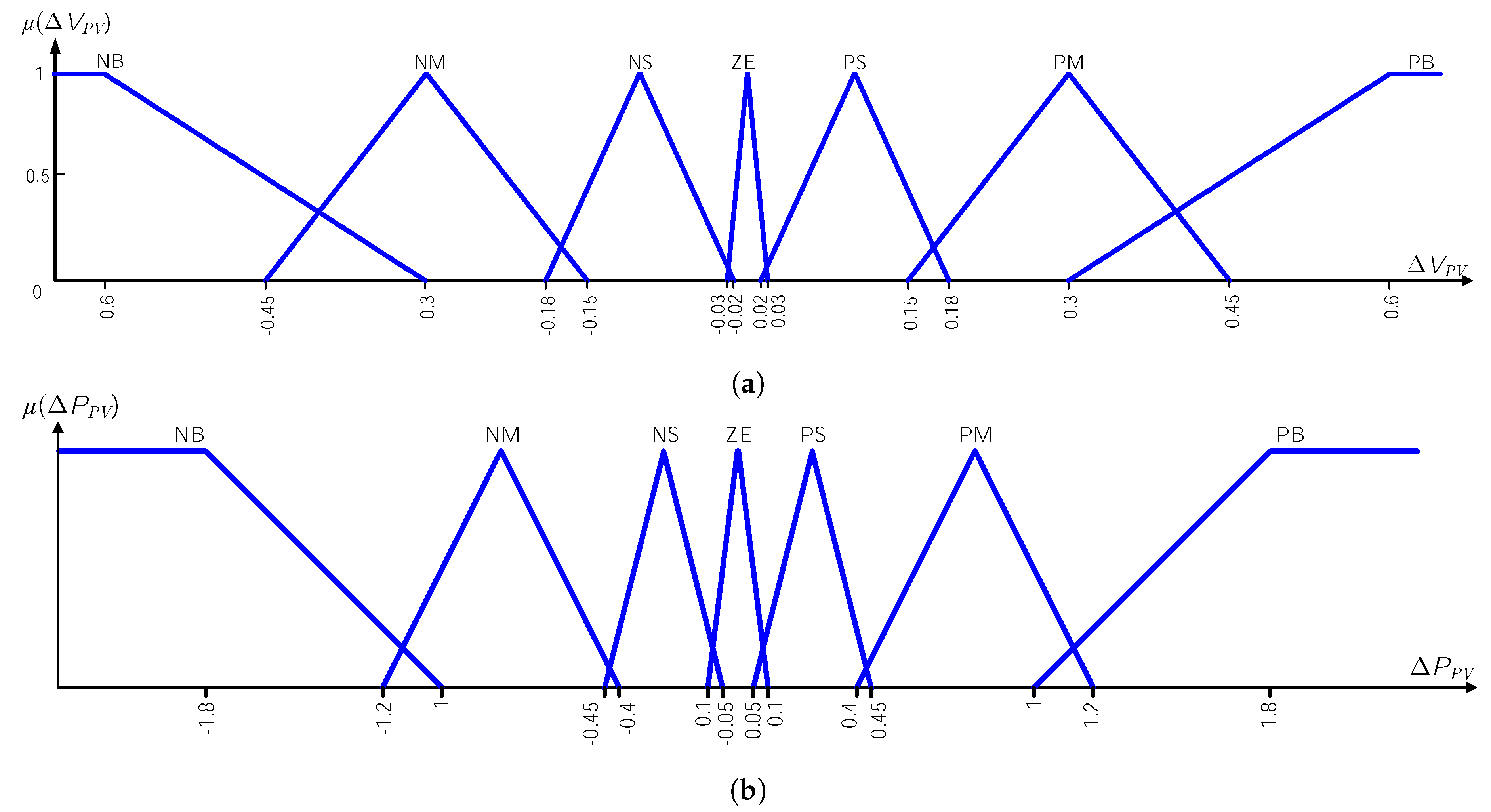
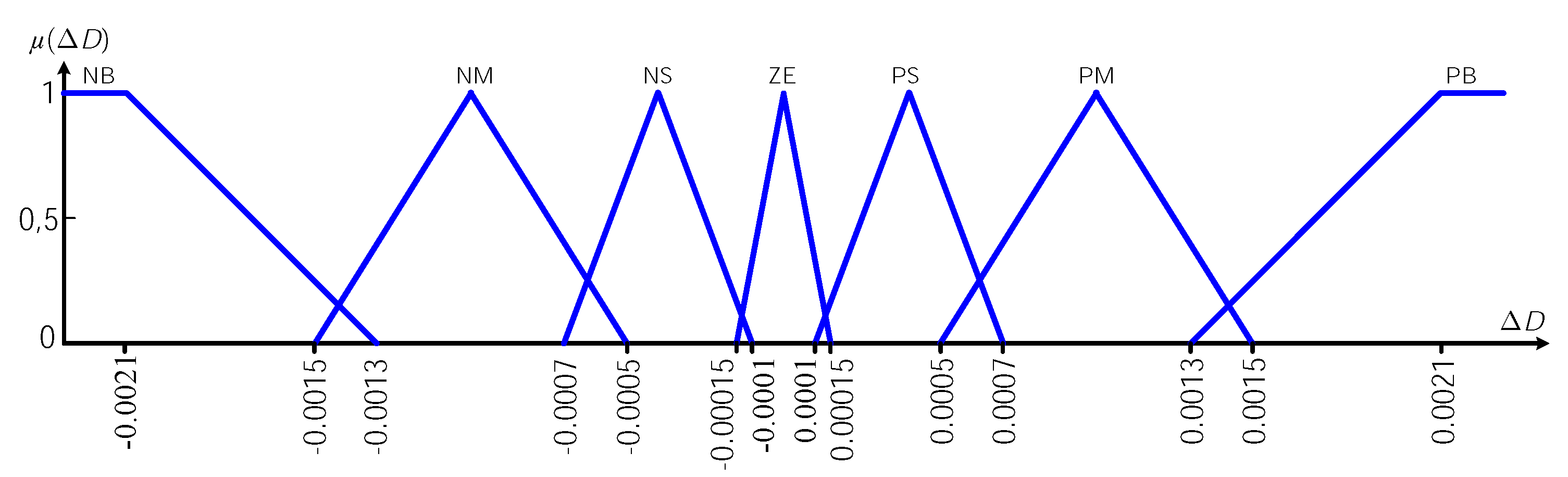
2.3.1. Fuzzification
2.3.2. Inference
2.3.3. Defuzzification
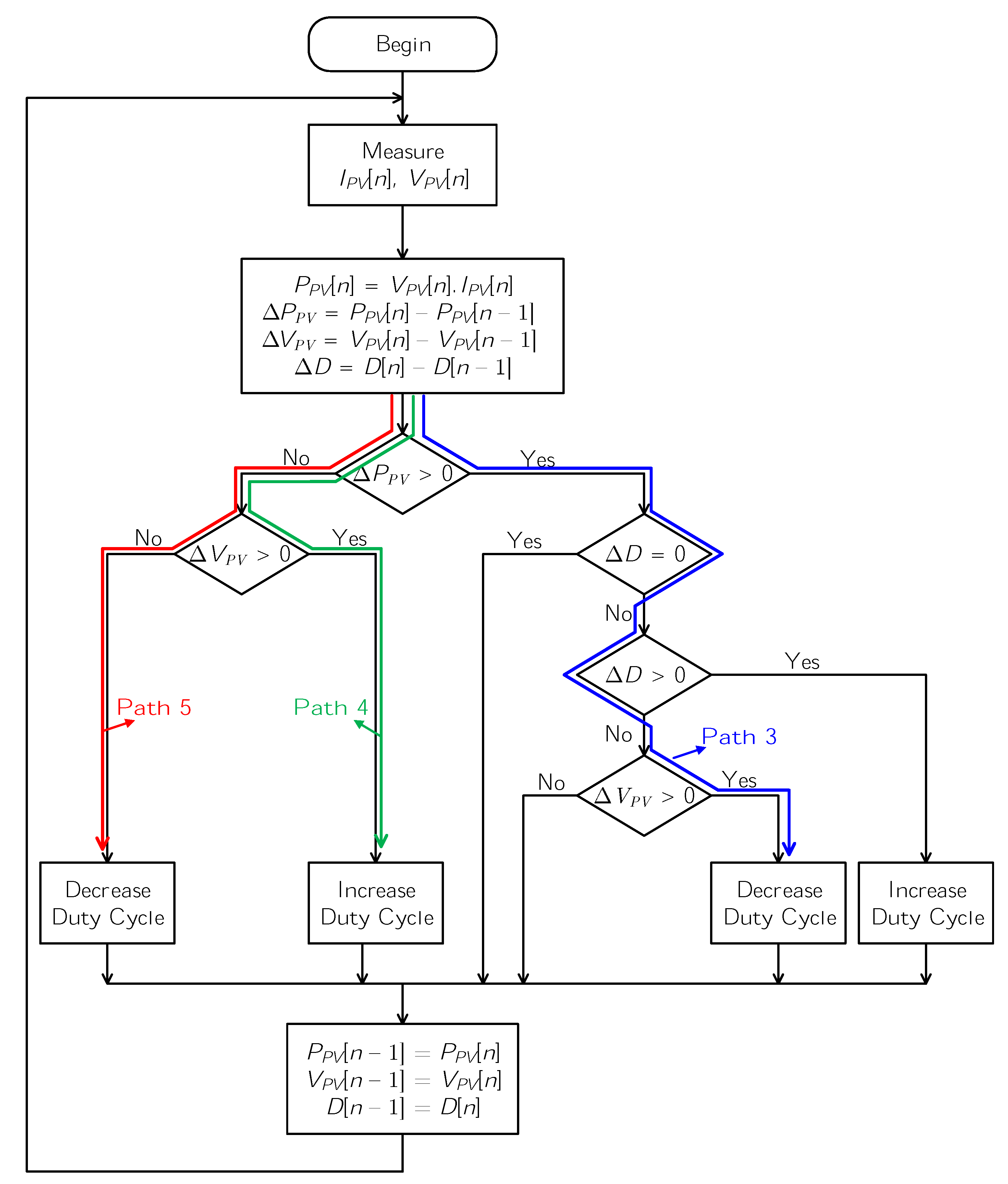
3. Proposed MPPT Algorithm
3.1. Suddenly Increasing Solar Irradiation
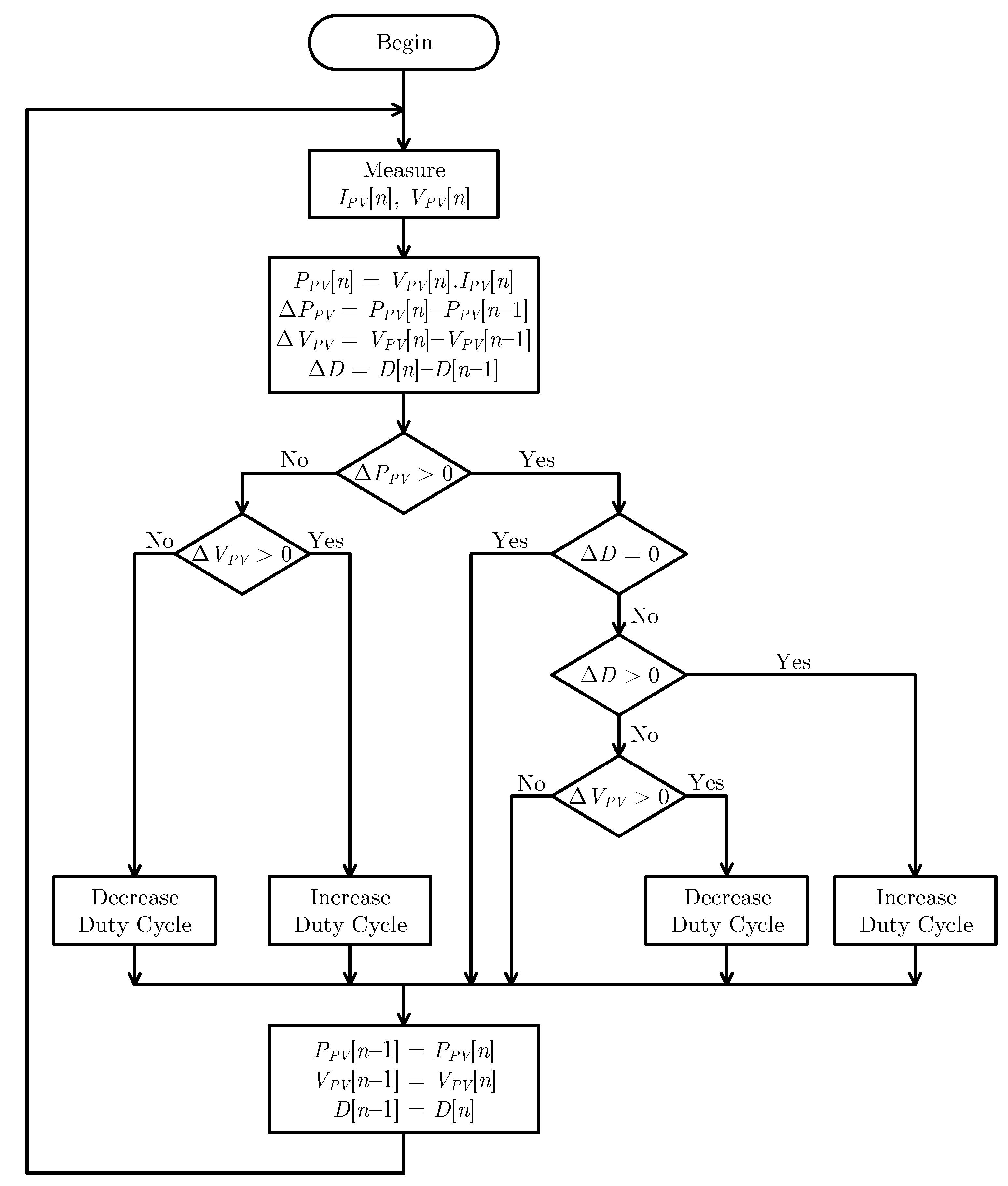
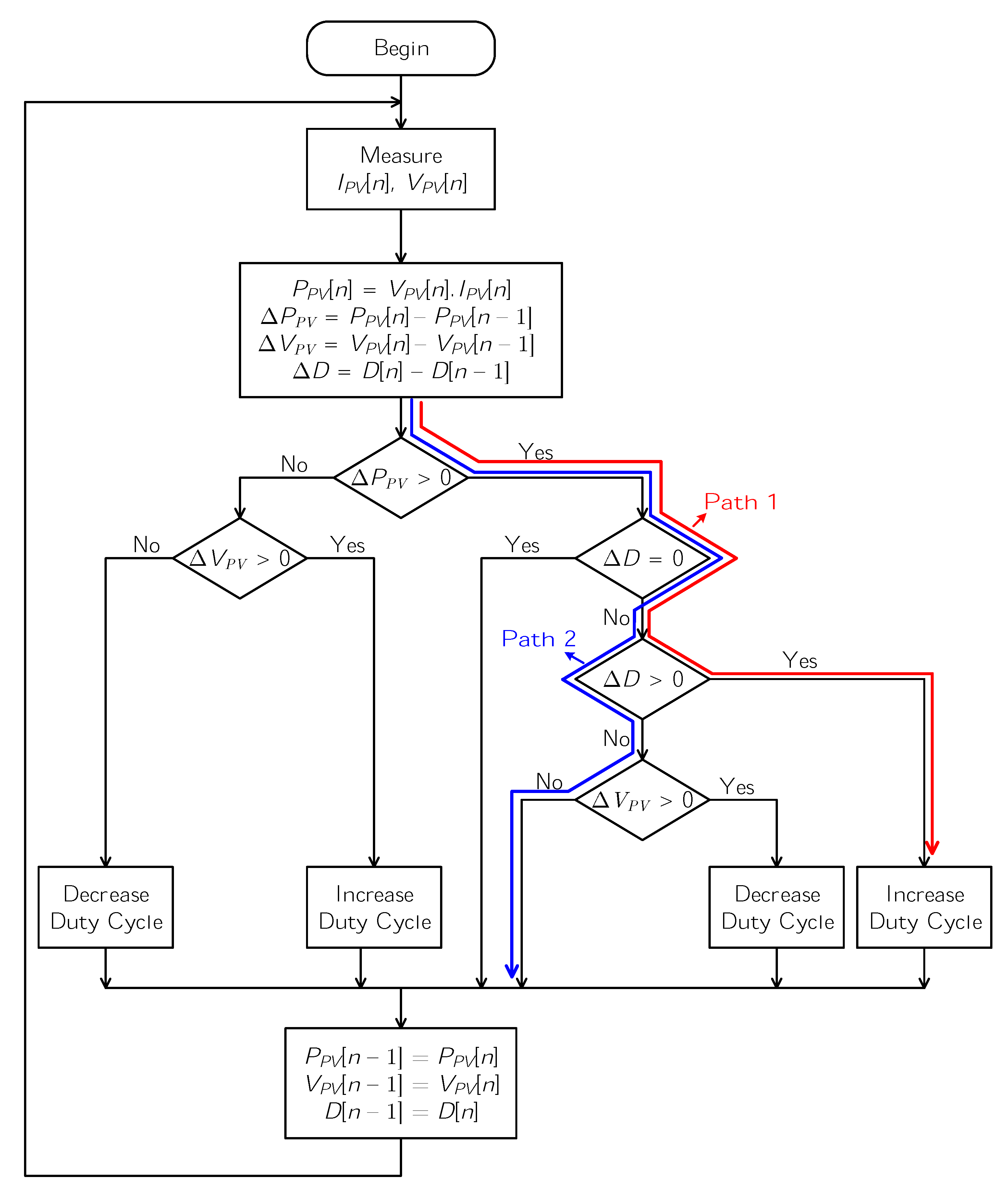
- In the case of and : The increase of duty cycle D at the current switching cycle causes the rise of the output power. At this moment, the MPPT controller will increase the duty cycle D according to the HC algorithm as and . From [21], when the solar irradiation increases, the duty cycle at the MPP () is also widened. Hence, the MPP moves to the right of the power and duty cycle plane. The duty cycle D should be increased in the following cycle. This adjustment of D is also applied in the case of stable irradiation [21]. Path 1 in Figure 13 presents the adaptiveness of the proposed method in this case.
- In the case of , , and : As mentioned in Section 2.1, the P&O algorithm increases the duty cycle D in the following switching cycles. However, this results in not tracking the MPP correctly when the solar irradiation changes suddenly. Thus, instead of varying the duty cycle D, the proposed method keeps D constant in the following switching cycles. The output power of the PV system will increase due to the rise of solar irradiation at the constant value of D. Path 2 in Figure 13 depicts the adaptiveness of the proposed method in this case.
3.2. Stable Solar Radiation
4. Simulation
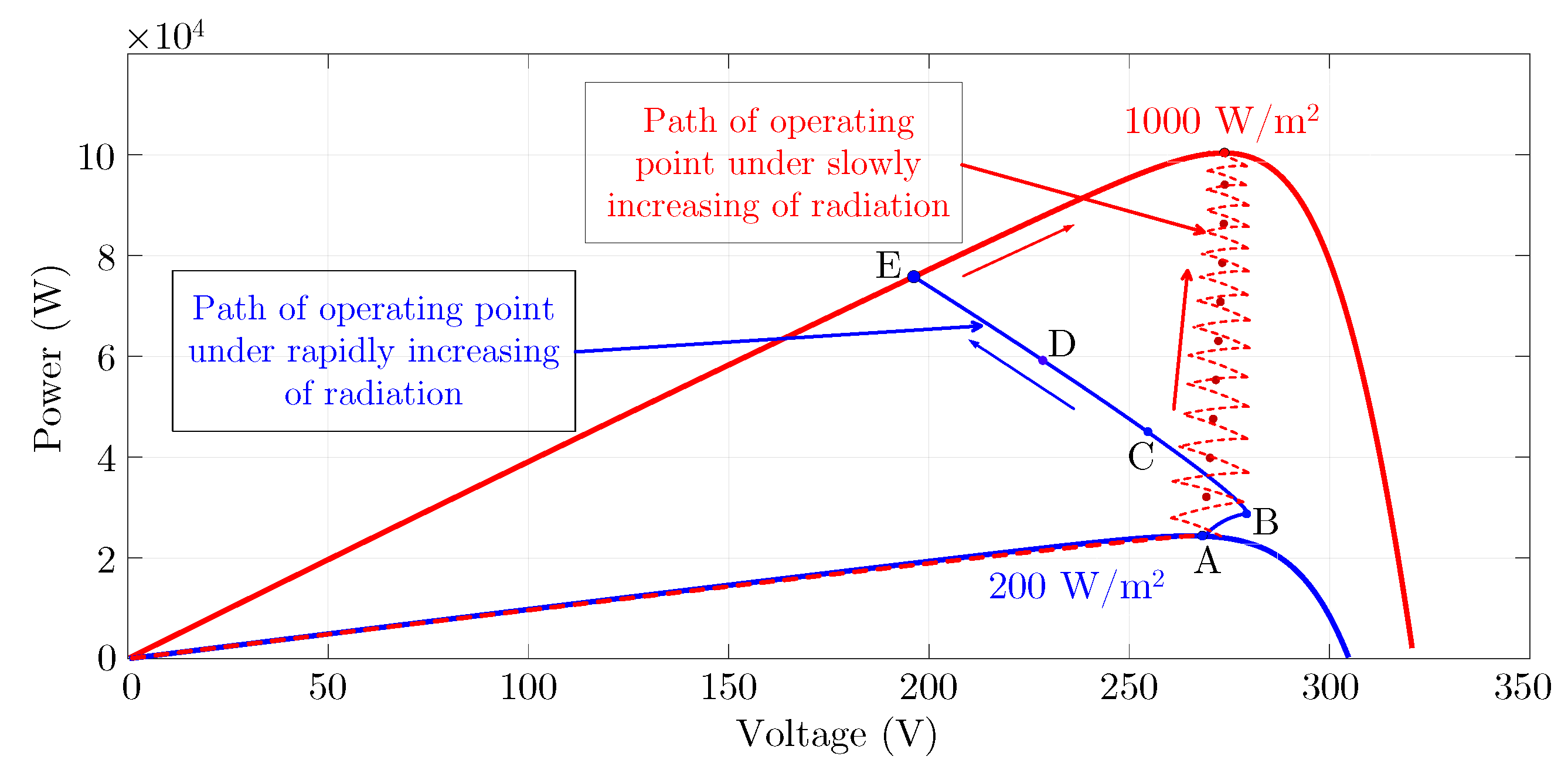
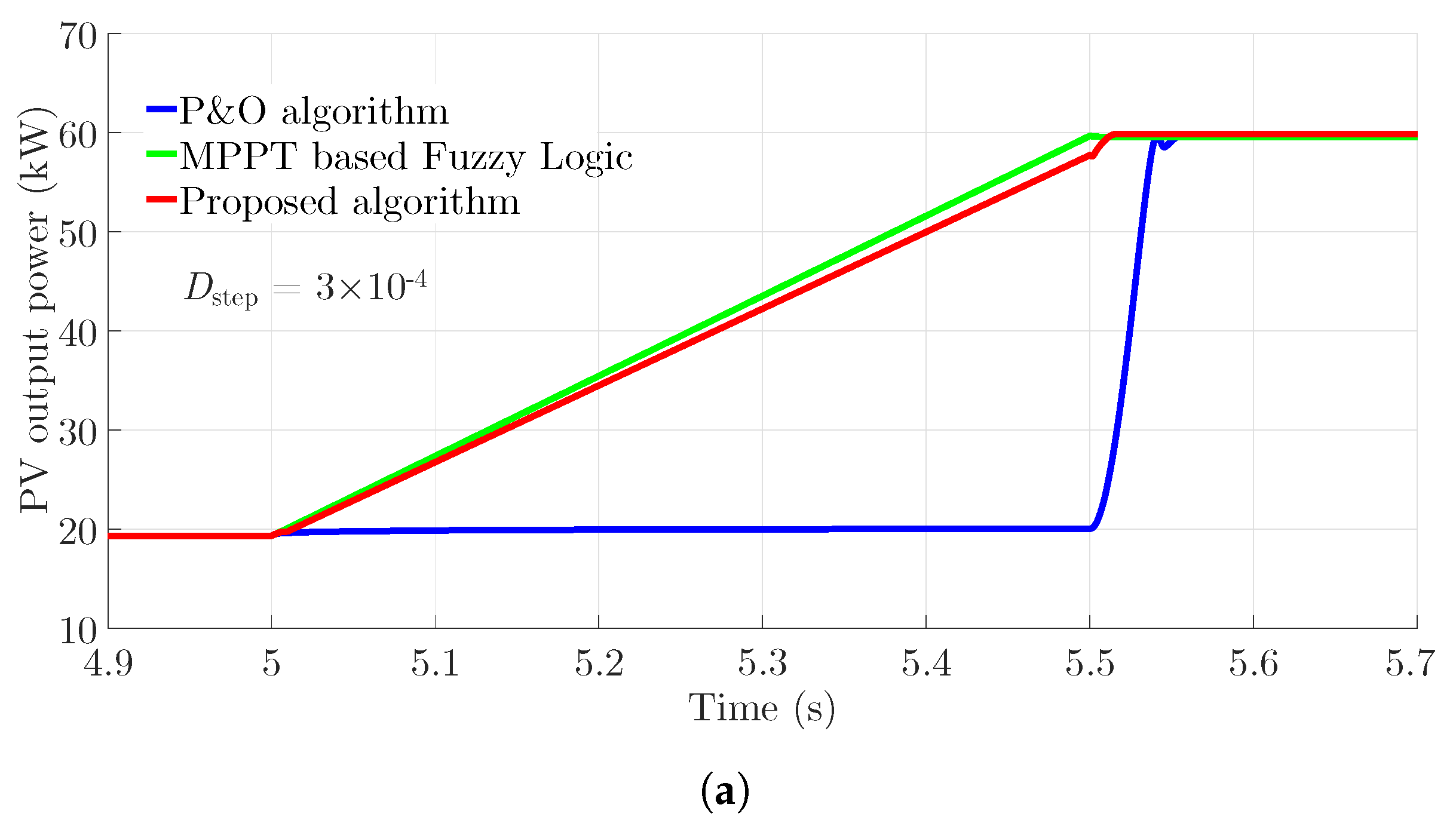
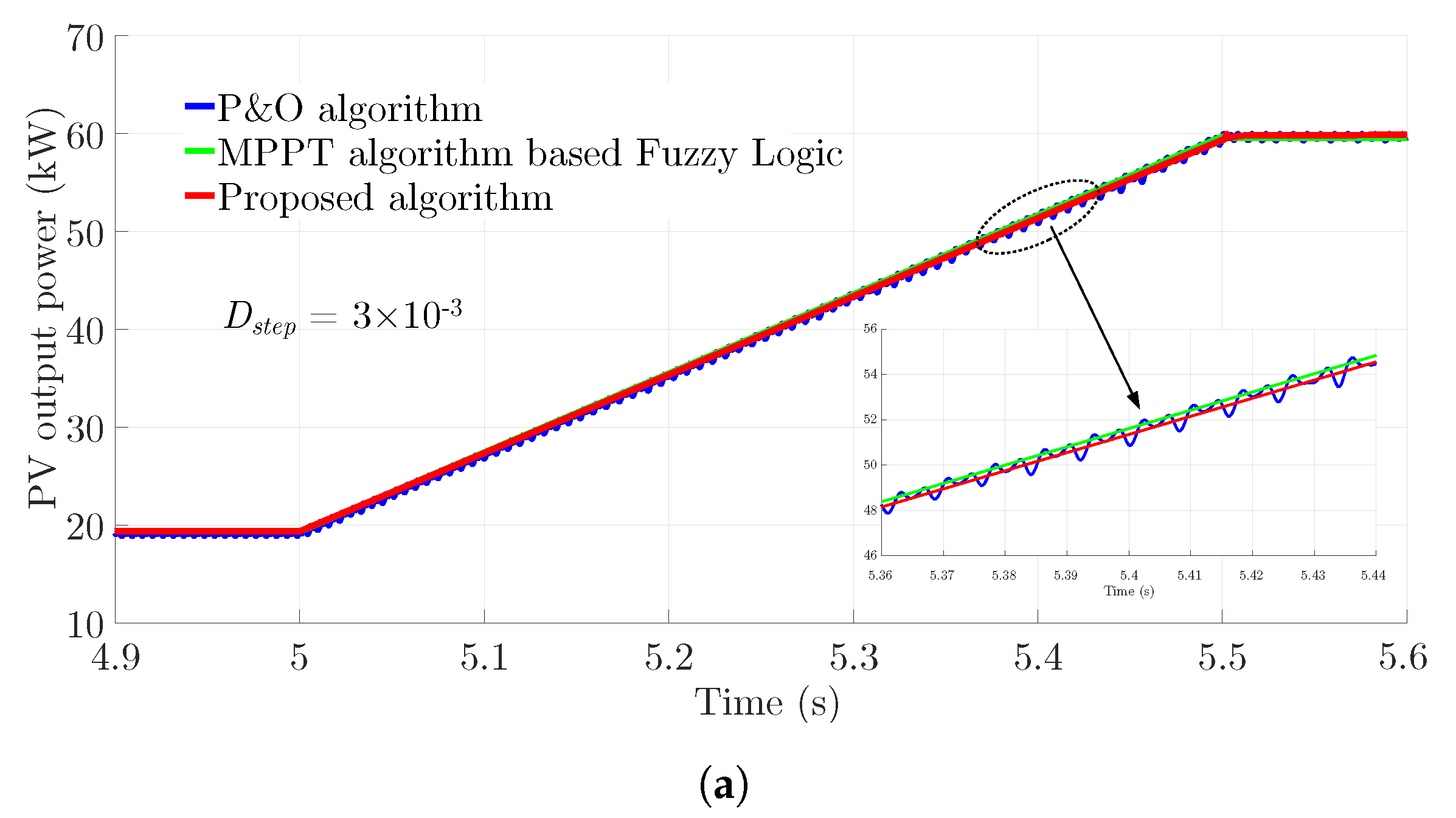
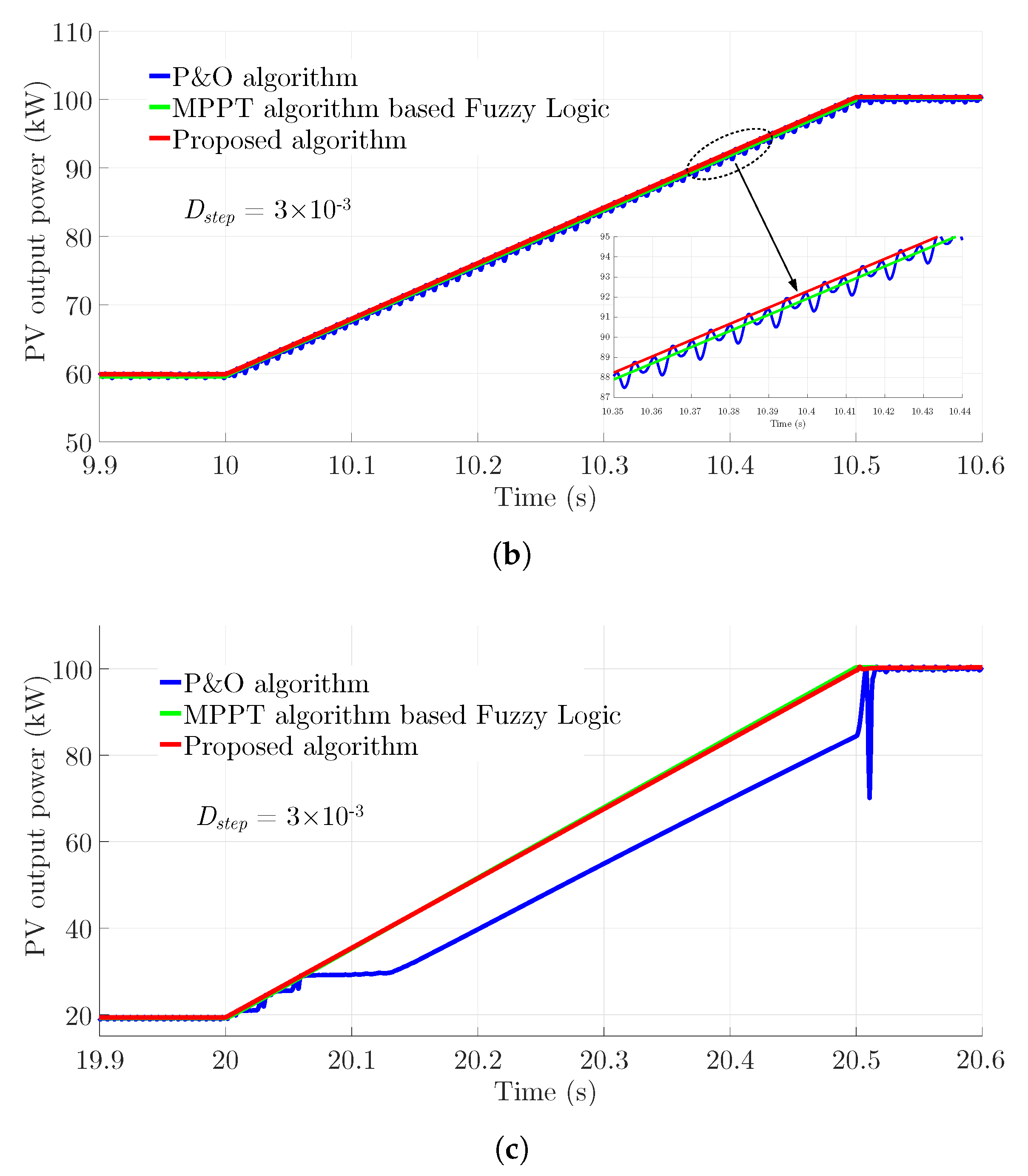
4.1. Rapid Increase of Solar Radiance
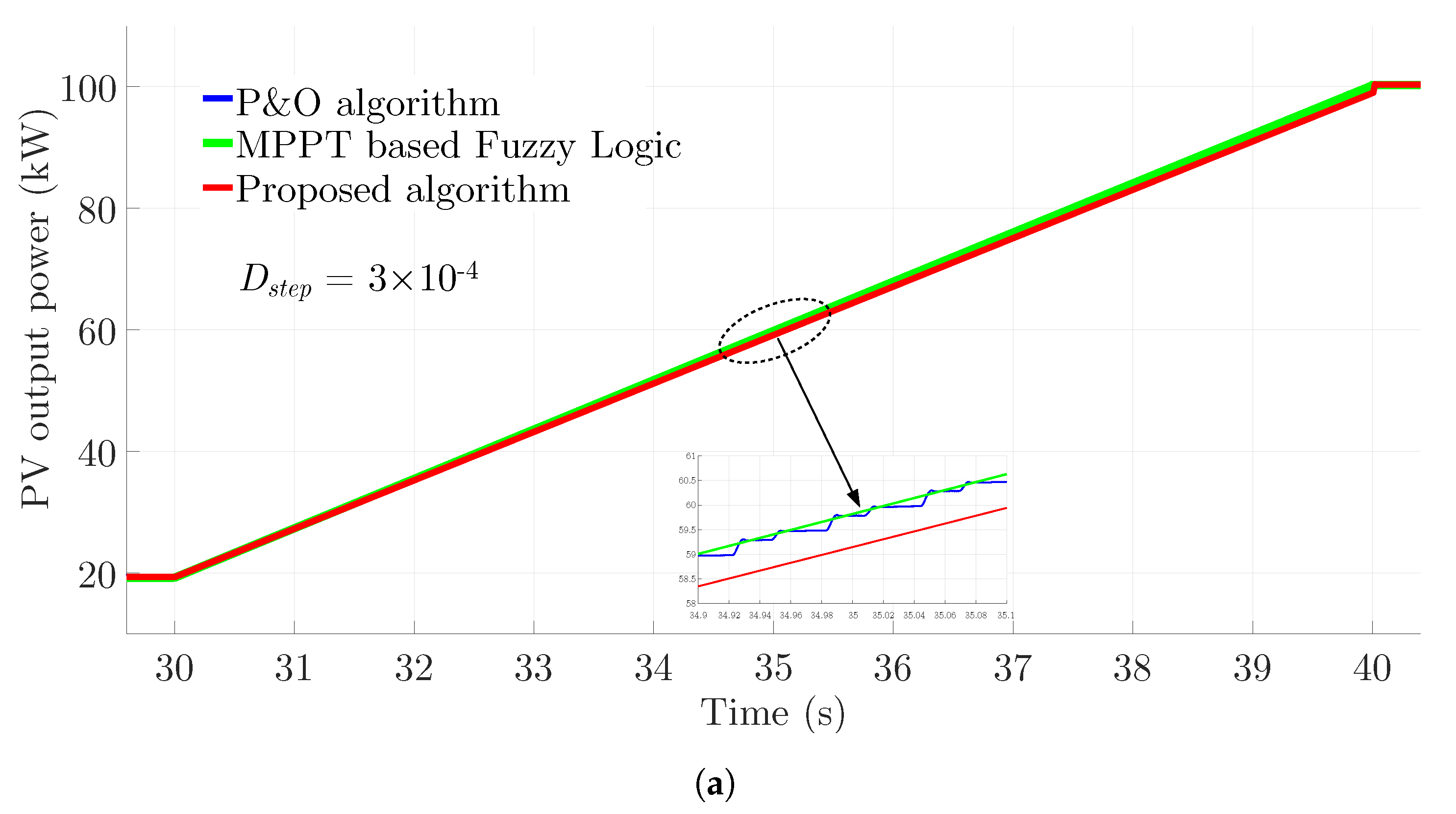
4.2. Slow Increase of Solar Radiance
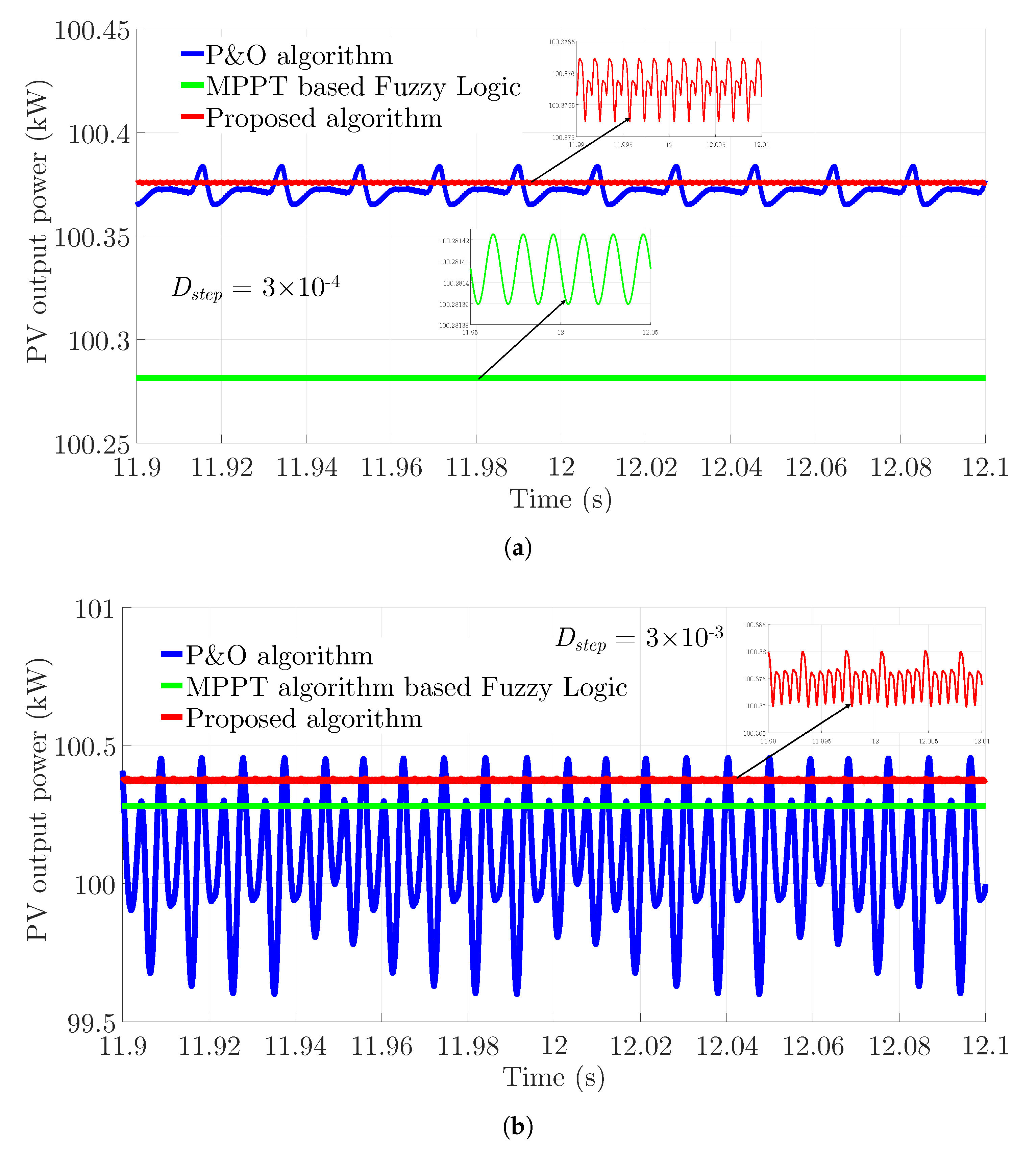
4.3. Stable Solar Radiance Condition
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MG | Microgrid |
| PV | Photovoltaic |
| MPP | Maximum Power Point |
| MPPT | Maximum Power Point Tracking |
| P&O | Perturb and Observe |
| FL | Fuzzy Logic |
| INC | Incremental Conductance |
| HC | Hill Climbing |
| ANN | Artificial Neural Network |
References
- Liserre, M.; Sauter, T.; Hung, J.Y. Future Energy Systems: Integrating Renewable Energy Sources into the Smart Power Grid Through Industrial Electronics. IEEE Ind. Electron. Mag. 2010, 4, 18–37. [Google Scholar] [CrossRef]
- Chaouachi, A.; Kamel, R.; Nagasaka, K. Microgrid efficiency enhancement based on neuro-fuzzy MPPT control for Photovoltaic generator. In Proceedings of the 2010 35th IEEE Photovoltaic Specialists Conference, Honolulu, HI, USA, 20–25 June 2010; pp. 2889–2894. [Google Scholar] [CrossRef]
- Abdelsalam, A.; Massoud, A.; Ahmed, S.; Enjeti, P. High-Performance Adaptive Perturb and Observe MPPT Technique for Photovoltaic-Based Microgrids. Power Electron. IEEE Trans. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Nguyen, V.T.; Hoang, D.H.; Nguyen, H.H.; Le, K.H.; Truong, T.K.; Le, Q.C. Analysis of Uncertainties for the Operation and Stability of an Islanded Microgrid. In Proceedings of the 2019 International Conference on System Science and Engineering (ICSSE), Dong Hoi, Vietnam, 20–21 July 2019; pp. 178–183. [Google Scholar]
- Lam, L.; Phuc, T.; Hieu, N. Simulation Models For Three-Phase Grid Connected PV Inverters Enabling Current Limitation Under Unbalanced Faults. Eng. Technol. Appl. Sci. Res. 2020, 10, 5396–5401. [Google Scholar]
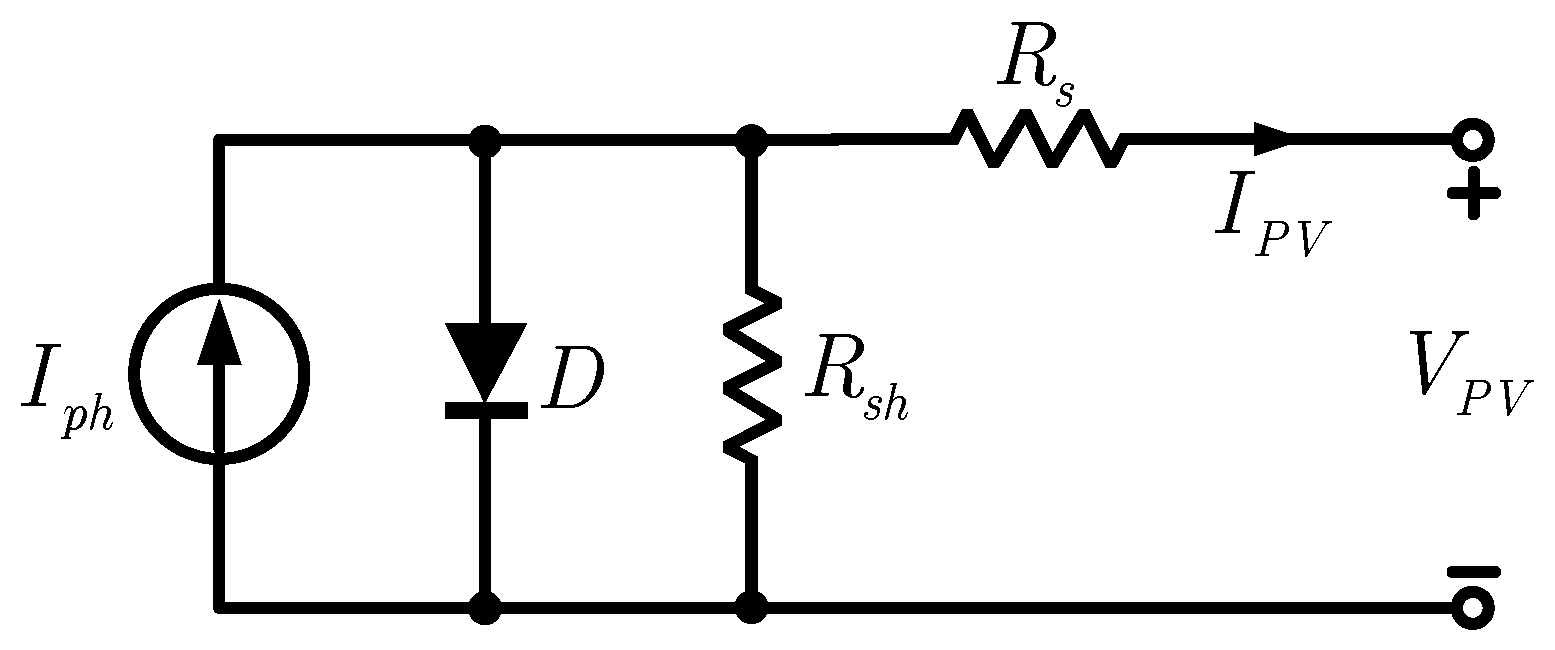
- Park, H.; Kim, H. PV cell modeling on single-diode equivalent circuit. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1845–1849. [Google Scholar] [CrossRef]
- Alrahim Shannan, N.M.A.; Yahaya, N.Z.; Singh, B. Single-diode model and two-diode model of PV modules: A comparison. In Proceedings of the 2013 IEEE International Conference on Control System, Computing and Engineering, Mindeb, Malaysia, 29 November–1 December 2013; pp. 210–214. [Google Scholar] [CrossRef]
- Soon, J.J.; Low, K. Optimizing Photovoltaic Model for Different Cell Technologies Using a Generalized Multidimension Diode Model. IEEE Trans. Ind. Electron. 2015, 62, 6371–6380. [Google Scholar] [CrossRef]
- Pandey, P.K.; Sandhu, K.S. Multi diode modelling of PV cell. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Babu, B.C.; Gurjar, S. A Novel Simplified Two-Diode Model of Photovoltaic (PV) Module. IEEE J. Photovolt. 2014, 4, 1156–1161. [Google Scholar] [CrossRef]
- Mehta, H.K.; Warke, H.; Kukadiya, K.; Panchal, A.K. Accurate Expressions for Single-Diode-Model Solar Cell Parameterization. IEEE J. Photovolt. 2019, 9, 803–810. [Google Scholar] [CrossRef]
- Shongwe, S.; Hanif, M. Comparative Analysis of Different Single-Diode PV Modeling Methods. IEEE J. Photovolt. 2015, 5, 938–946. [Google Scholar] [CrossRef]
- Batushansky, Z.; Kuperman, A. Thevenin-based approach to PV arrays maximum power prediction. In Proceedings of the 2010 IEEE 26-th Convention of Electrical and Electronics Engineers in Israel, Eliat, Israel, 17–20 November 2010; pp. 598–602. [Google Scholar] [CrossRef]
- Batzelis, E.I.; Kampitsis, G.E.; Papathanassiou, S.A.; Manias, S.N. Direct MPP Calculation in Terms of the Single-Diode PV Model Parameters. IEEE Trans. Energy Convers. 2015, 30, 226–236. [Google Scholar] [CrossRef]
- Zagrouba, M.; Sellami, A.; Bouaicha, M.; Ksouri, M. Identification of PV solar cells and modules parameters using the genetic algorithms: Application to maximum power extraction. Sol. Energy 2010, 84, 860–866. [Google Scholar] [CrossRef]
- Islam, M.N.; Rahman, M.Z.; Mominuzzaman, S.M. The effect of irradiation on different parameters of monocrystalline photovoltaic solar cell. In Proceedings of the 2014 3rd International Conference on the Developments in Renewable Energy Technology (ICDRET), Dhaka, Bangladesh, 29–31 May 2014; pp. 1–6. [Google Scholar]
- Razak, A.; Yusoff, M.; Leow, W.Z.; Irwanto, M.; Ibrahim, S.; Zhafarina, M. Investigation of the Effect Temperature on Photovoltaic (PV) Panel Output Performance. Int. J. Adv. Sci. Eng. Inf. Technol. 2016, 6, 682. [Google Scholar] [CrossRef]
- Santos, J.; Antunes, F.; Chehab, A.; Cruz, C. A maximum power point tracker for PV systems using a high performance boost converter. Sol. Energy 2006, 80, 772–778. [Google Scholar] [CrossRef]
- Kebir, G.; Larbes, C.; Ilinca, A.; Obeidi, T.; Kebir, S. Study of the Intelligent Behavior of a Maximum Photovoltaic Energy Tracking Fuzzy Controller. Energies 2018, 11, 3263. [Google Scholar] [CrossRef]
- Subudhi, B.; Pradhan, R. A Comparative Study on Maximum Power Point Tracking Techniques for Photovoltaic Power Systems. IEEE Trans. Sustain. Energy 2013, 4, 89–98. [Google Scholar] [CrossRef]
- Nguyen, B.N.; Nguyen, V.T.; Duong, M.Q.; Le, K.H.; Nguyen, H.H.; Doan, A.T. Propose a MPPT Algorithm Based on Thevenin Equivalent Circuit for Improving Photovoltaic System Operation. Front. Energy Res. 2020, 8, 14. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Bendib, B.; Belmili, H.; Krim, F. A survey of the most used MPPT methods: Conventional and advanced algorithms applied for photovoltaic systems. Renew. Sustain. Energy Rev. 2015, 45, 637–648. [Google Scholar] [CrossRef]
- Hohm, D.; Ropp, M. Comparative Study of Maximum Power Point Tracking Algorithms. Prog. Photovolt. Res. Appl. 2003, 11, 47–62. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of Perturb and Observe Maximum Power Point Tracking Method. Power Electron. IEEE Trans. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Kollimalla, S.K.; Mishra, M.K. A Novel Adaptive P O MPPT Algorithm Considering Sudden Changes in the Irradiance. IEEE Trans. Energy Convers. 2014, 29, 602–610. [Google Scholar] [CrossRef]
- Piegari, L.; Rizzo, R. Adaptive perturb and observe algorithm for photovoltaic maximum power point tracking. IET Renew. Power Gener. 2010, 4, 317–328. [Google Scholar] [CrossRef]
- Tan, C.W.; Green, T.C.; Hernandez-Aramburo, C.A. An Improved Maximum Power Point Tracking Algorithm with Current-Mode Control for Photovoltaic Applications. In Proceedings of the 2005 International Conference on Power Electronics and Drives Systems, Kuala Lumpur, Malaysia, 28 November–1 December 2005; Volume 1, pp. 489–494. [Google Scholar] [CrossRef]
- Algazar, M.; AL-monier, H.; EL-halim, H.; Salem, M. Maximum power point tracking using fuzzy logic control. Int. J. Electr. Power Energy Syst. 2012, 39, 21–28. [Google Scholar] [CrossRef]
- Saleh, A.; Faiqotul Azmi, K.S.; Hardianto, T.; Hadi, W. Comparison of MPPT Fuzzy Logic Controller Based on Perturb and Observe (P&O) and Incremental Conductance (InC) Algorithm On Buck-Boost Converter. In Proceedings of the 2018 2nd International Conference on Electrical Engineering and Informatics (ICon EEI), Batam, Indonesia, 16–17 October 2018; pp. 154–158. [Google Scholar] [CrossRef]
- Patcharaprakiti, N.; Premrudeepreechacharn, S. Maximum power point tracking using adaptive fuzzy logic control for grid-connected photovoltaic system. In Proceedings of the 2002 IEEE Power Engineering Society Winter Meeting, Conference Proceedings (Cat. No.02CH37309), New York, NY, USA, 27–31 January 2002; Volume 1, pp. 372–377. [Google Scholar] [CrossRef]
- Bendib, B.; Krim, F.; Belmili, H.; Almi, M.F.; Bolouma, S. An intelligent MPPT approach based on neural-network voltage estimator and fuzzy controller, applied to a stand-alone PV system. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 404–409. [Google Scholar] [CrossRef]
- Chekired, F.; Mellit, A.; Kalogirou, S.; Larbes, C. Intelligent maximum power point trackers for photovoltaic applications using FPGA chip: A comparative study. Sol. Energy 2014, 101, 83–99. [Google Scholar] [CrossRef]
- Shiau, J.K.; Wei, Y.C.; Chen, B.C. A Study on the Fuzzy-Logic-Based Solar Power MPPT Algorithms Using Different Fuzzy Input Variables. Algorithms 2015, 8, 100–127. [Google Scholar] [CrossRef]
- Hua, C.; Shen, C. Study of maximum power tracking techniques and control of DC/DC converters for photovoltaic power system. In Proceedings of the PESC 98 Record, 29th Annual IEEE Power Electronics Specialists Conference (Cat. No.98CH36196), Fukuoka, Japan, 22–22 May 1998; Volume 1, pp. 86–93. [Google Scholar] [CrossRef]
- Pei, T.; Hao, X.; Gu, Q. A Novel Global Maximum Power Point Tracking Strategy Based on Modified Flower Pollination Algorithm for Photovoltaic Systems under Non-Uniform Irradiation and Temperature Conditions. Energies 2018, 11, 2708. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Execution | |||
|---|---|---|---|
| — | — | ||
| — | |||
| Panel Data | |||
|---|---|---|---|
| Module | SunPower SPR-305E-WHT-D | ||
| Maximum power (W) | 305.226 | Cells per module () | 96 |
| Open circuit voltage (V) | 64.2 | Short-circuit current (A) | 5.96 |
| Voltage at maximum power point | 54.7 | Current at maximum power point | 5.58 |
| Temperature coefficient of (%/°C) | −0.27269 | Temperature coefficient of (%/C) | 0.061745 |
| Array Data | |||
| Parallel strings | 66 | ||
| Series-connected modules per string | 5 | ||
| Maximum power (kW) | 100.7 | ||
| Temperature C | 25 | ||
| Boost Converter’s Parameters | |||
| Inductor L | 0.64 mH | ||
| Output capacitor | 100 F | ||
| Initial duty cycle | 0.5 | ||
| Duty cycle step | |||
| Switching frequency | 50 kHz | ||
| Algorithm | Average Output Power | Oscillation Level | Duty Cycle Step () |
|---|---|---|---|
| P&O algorithm | 100.37 kW | 18.8 W | |
| 100.1 kW | 854 W | ||
| MPPT algorithm based on FL | 100.28 kW | 0.3 W | |
| Proposed algorithm | 100.38 kW | 1 W | |
| 100.37 kW | 10 W |
| Radiance Conditions | MPPT Efficient ( %) | ||
|---|---|---|---|
| P&O with | MPPT Based on FL | Proposed Algorithm with | |
| Rapid increase from to | 50.39 | 99.74 | 96.91 |
| Rapid increase from to | 75.13 | 99.46 | 99.77 |
| Rapid increase from to | 33.98 | 99.50 | 99.51 |
| Stable condition | 99.68 | 99.59 | 99.58 |
| Radiance Conditions | MPPT Efficient( %) | ||
| P&O with | MPPT Based FL | Proposed Algorithm with | |
| Rapid increase from to | 99.19 | 99.74 | 99.34 |
| Rapid increase from to | 99.31 | 99.46 | 99.80 |
| Rapid increase from to | 81.79 | 99.50 | 99.15 |
| Stable condition | 99.40 | 99.59 | 99.70 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Tan, N.; Nam, N.B.; Hieu, N.H.; Hung, L.K.; Duong, M.Q.; Lam, L.H. A Proposal for an MPPT Algorithm Based on the Fluctuations of the PV Output Power, Output Voltage, and Control Duty Cycle for Improving the Performance of PV Systems in Microgrid. Energies 2020, 13, 4326. https://doi.org/10.3390/en13174326
Van Tan N, Nam NB, Hieu NH, Hung LK, Duong MQ, Lam LH. A Proposal for an MPPT Algorithm Based on the Fluctuations of the PV Output Power, Output Voltage, and Control Duty Cycle for Improving the Performance of PV Systems in Microgrid. Energies. 2020; 13(17):4326. https://doi.org/10.3390/en13174326
Chicago/Turabian StyleVan Tan, Nguyen, Nguyen Binh Nam, Nguyen Huu Hieu, Le Kim Hung, Minh Quan Duong, and Le Hong Lam. 2020. "A Proposal for an MPPT Algorithm Based on the Fluctuations of the PV Output Power, Output Voltage, and Control Duty Cycle for Improving the Performance of PV Systems in Microgrid" Energies 13, no. 17: 4326. https://doi.org/10.3390/en13174326
APA StyleVan Tan, N., Nam, N. B., Hieu, N. H., Hung, L. K., Duong, M. Q., & Lam, L. H. (2020). A Proposal for an MPPT Algorithm Based on the Fluctuations of the PV Output Power, Output Voltage, and Control Duty Cycle for Improving the Performance of PV Systems in Microgrid. Energies, 13(17), 4326. https://doi.org/10.3390/en13174326