Hybrid Pitch Angle Controller Approaches for Stable Wind Turbine Power under Variable Wind Speed

 ,
,  ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
- A robust pitch angle control strategy is proposed.
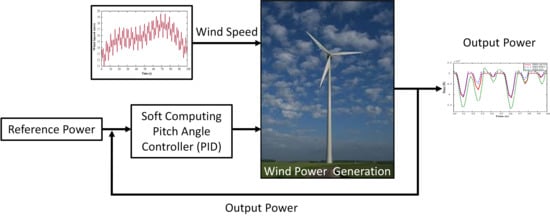
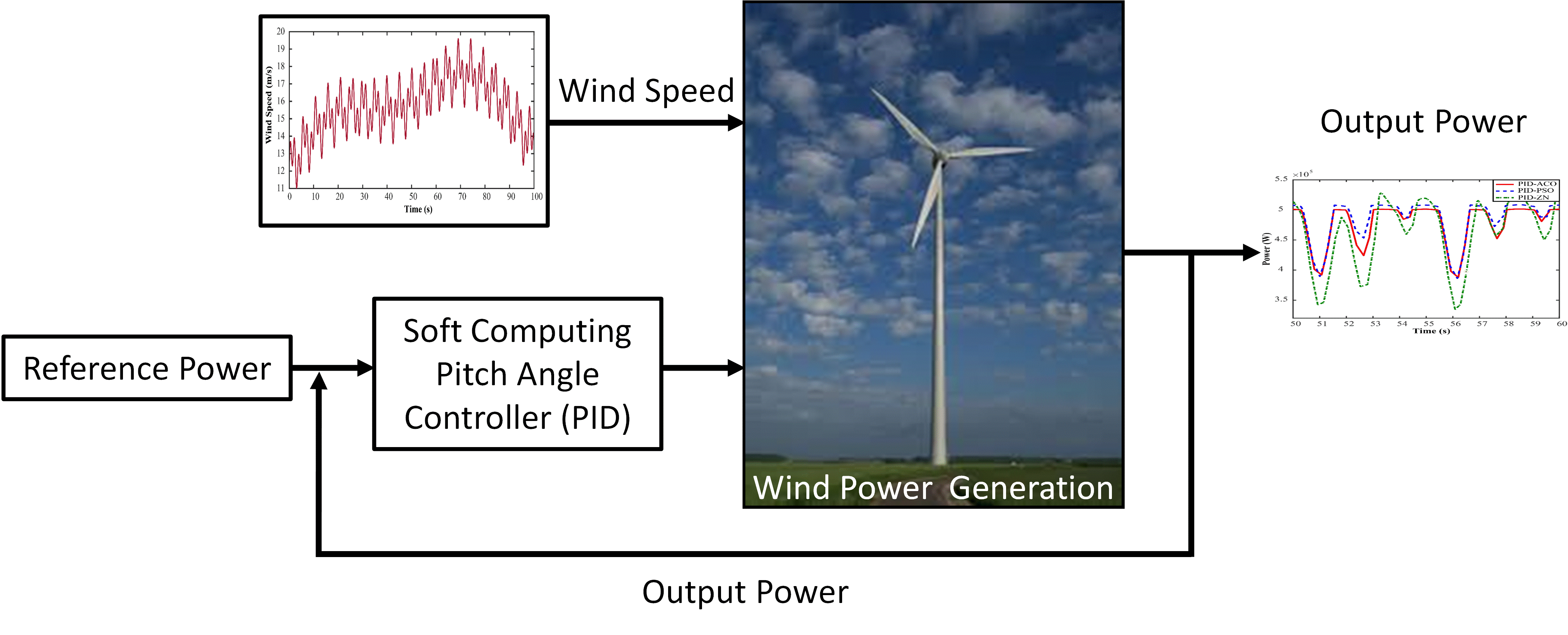
- The proposed system is simulated under a wide range wind speeds, and its results are compared with those of a PID-ZN controller and PID-PSO to verify its effectiveness.
- PID controller parameters are optimised using nature-inspired optimization methods, i.e., ACO and PSO.
- There are three modes of WPG under variable wind speed, namely , , and are analyzed, which will increase the robustness of the proposed controller.
2. Materials and Methods
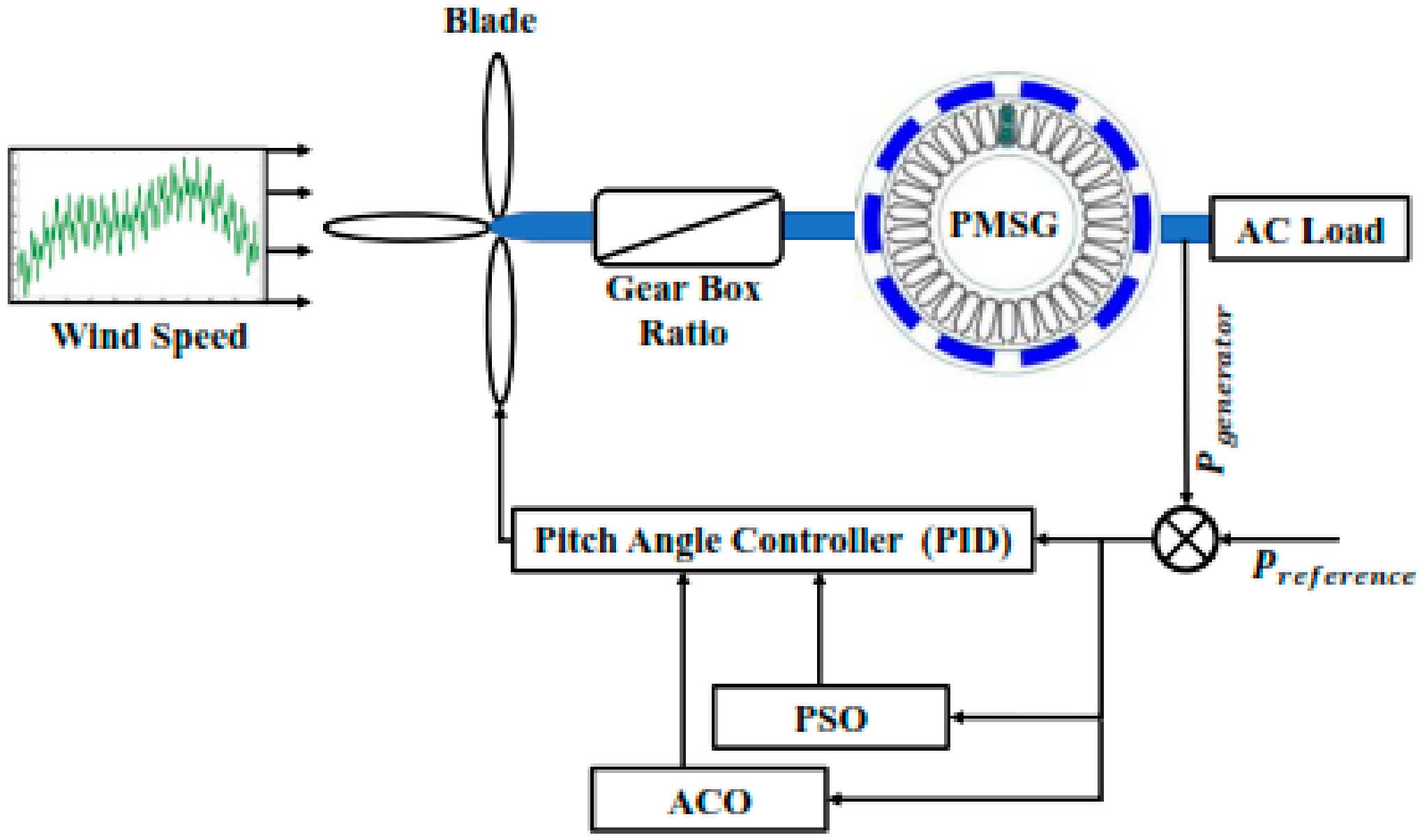
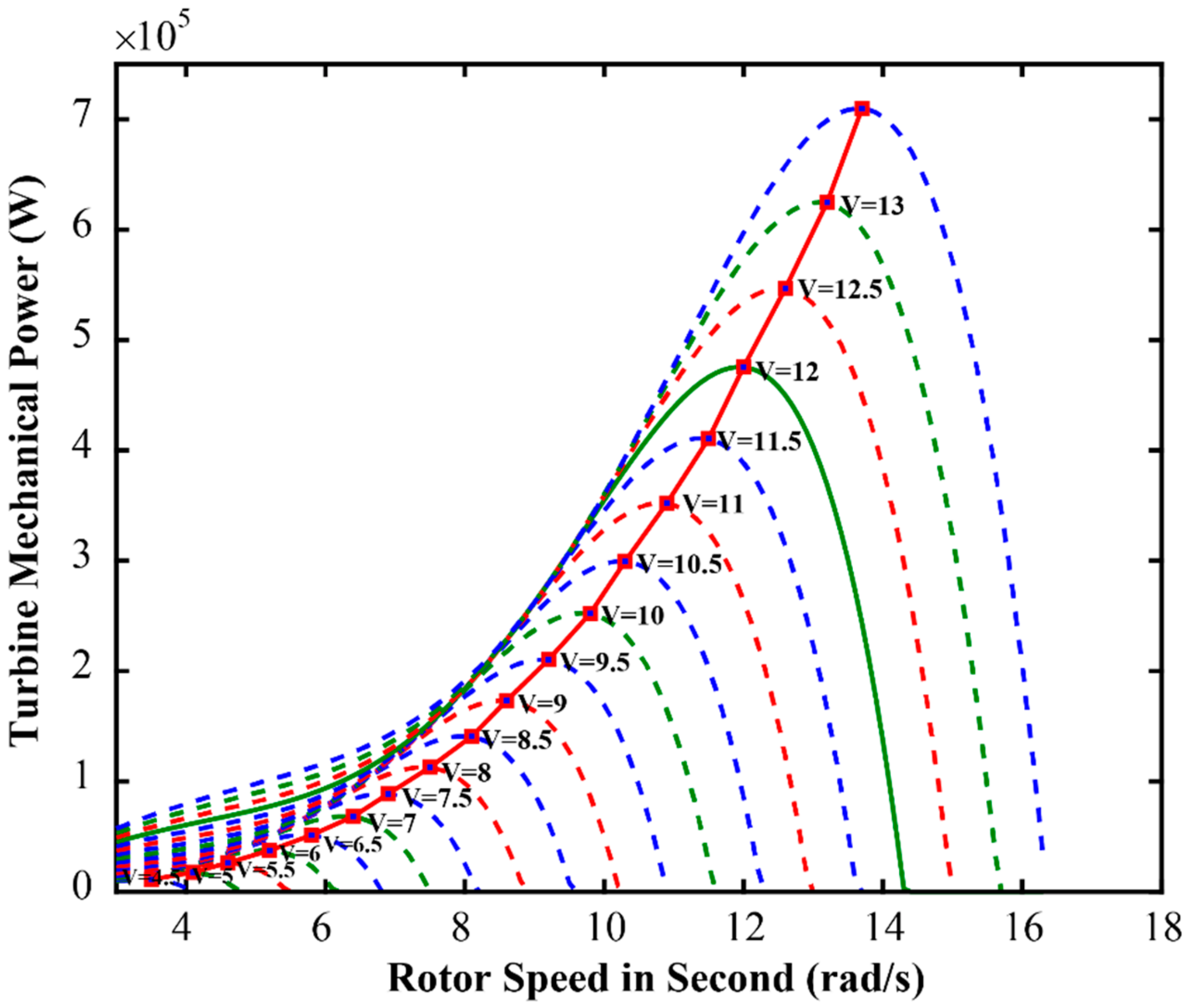
2.1. Wind Turbine Model
2.2. Modeling of Permanent Magnet Synchronous Generator (PMSG)
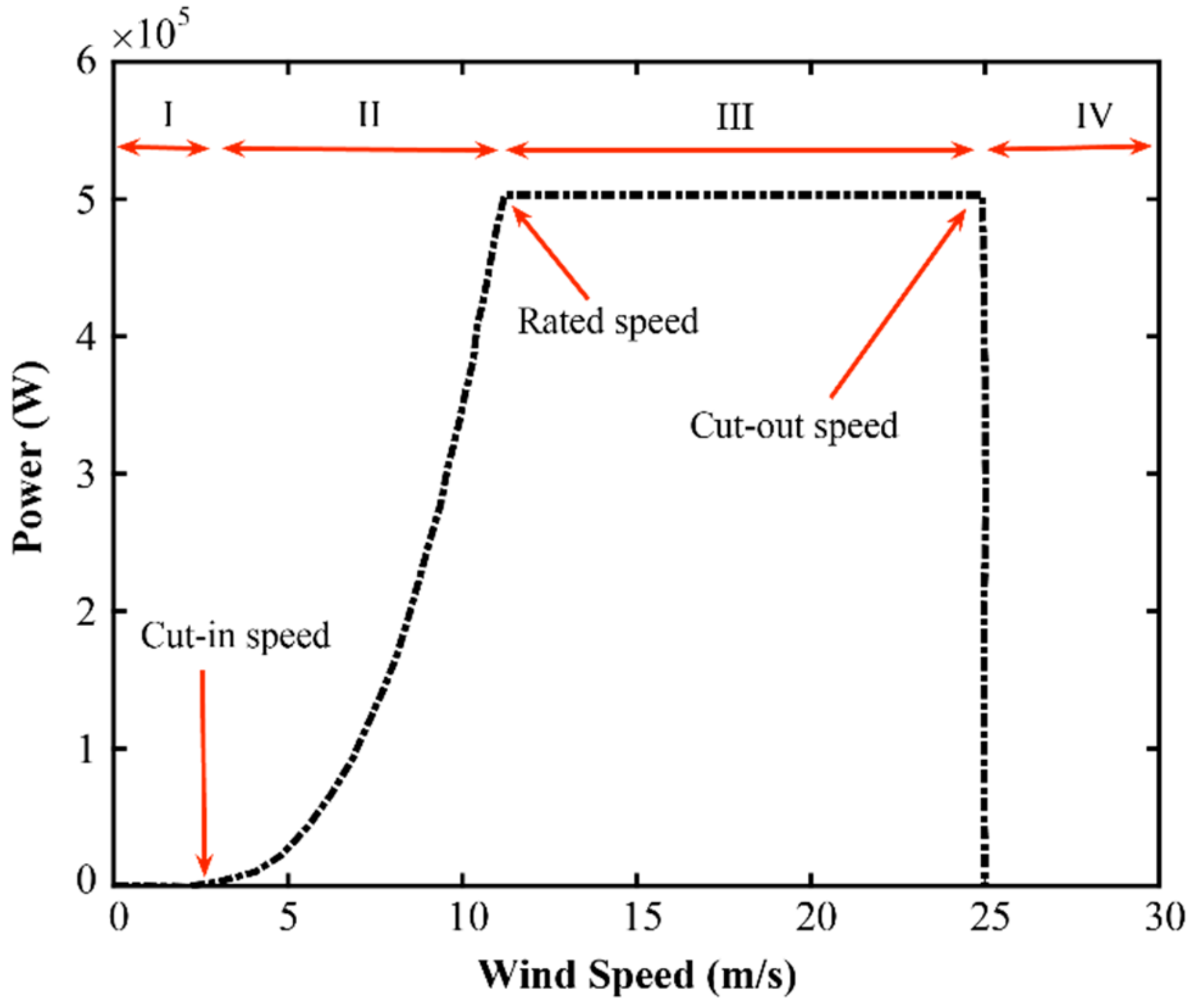
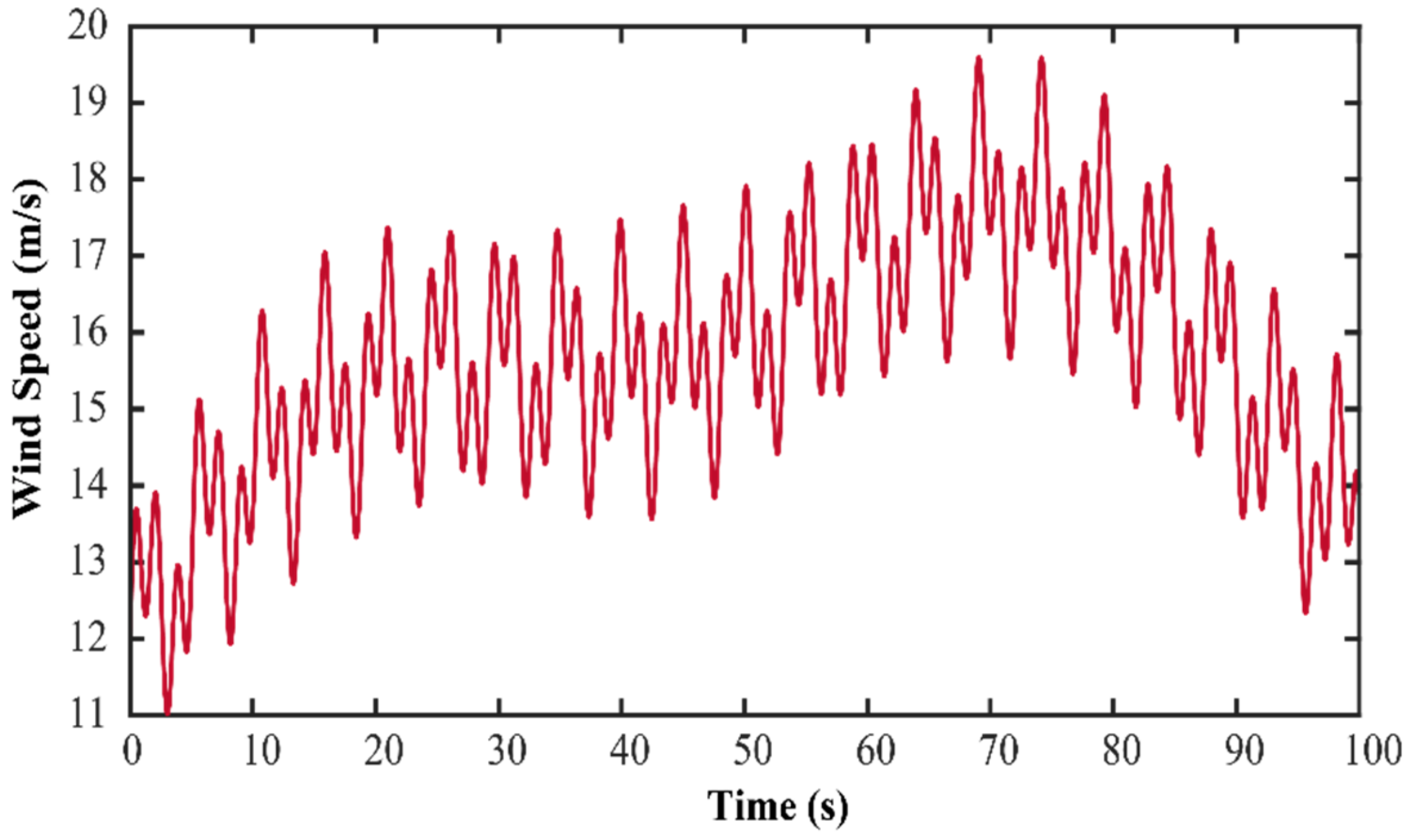
2.3. Profile of Wind Speed
2.4. Actuator Model
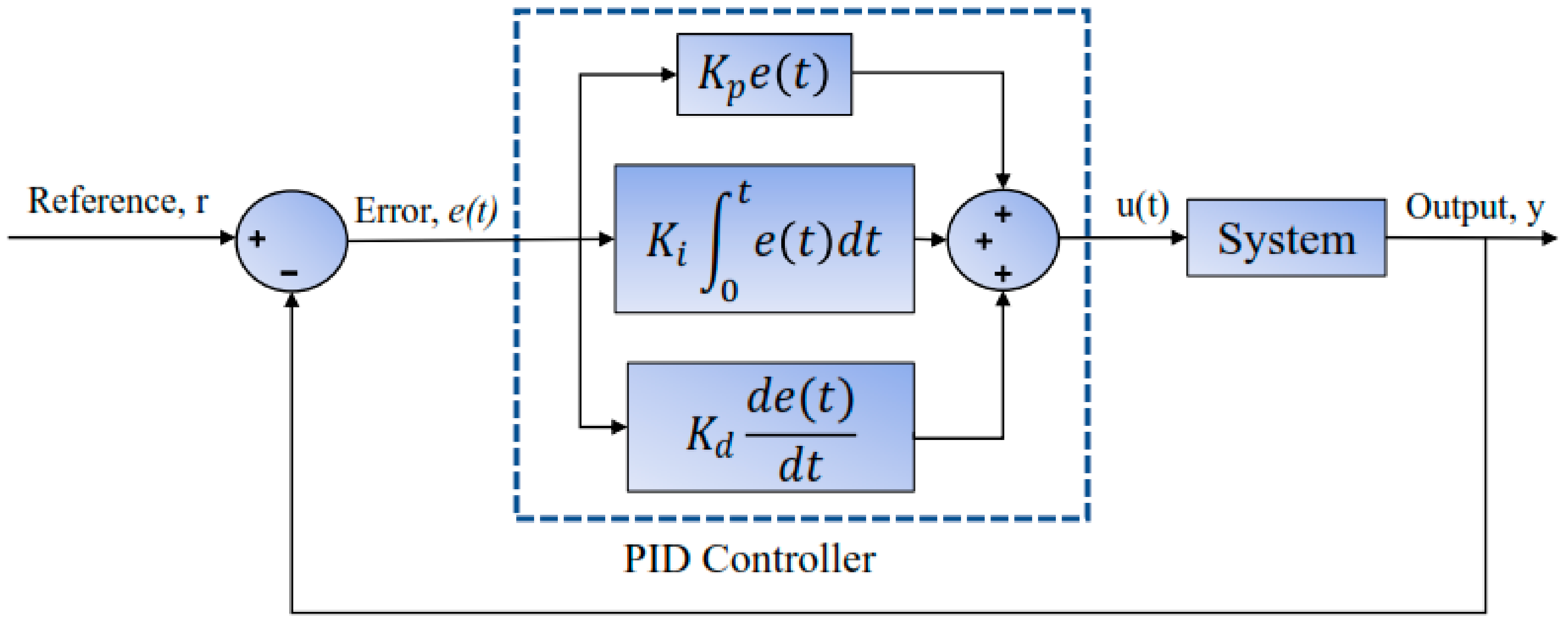
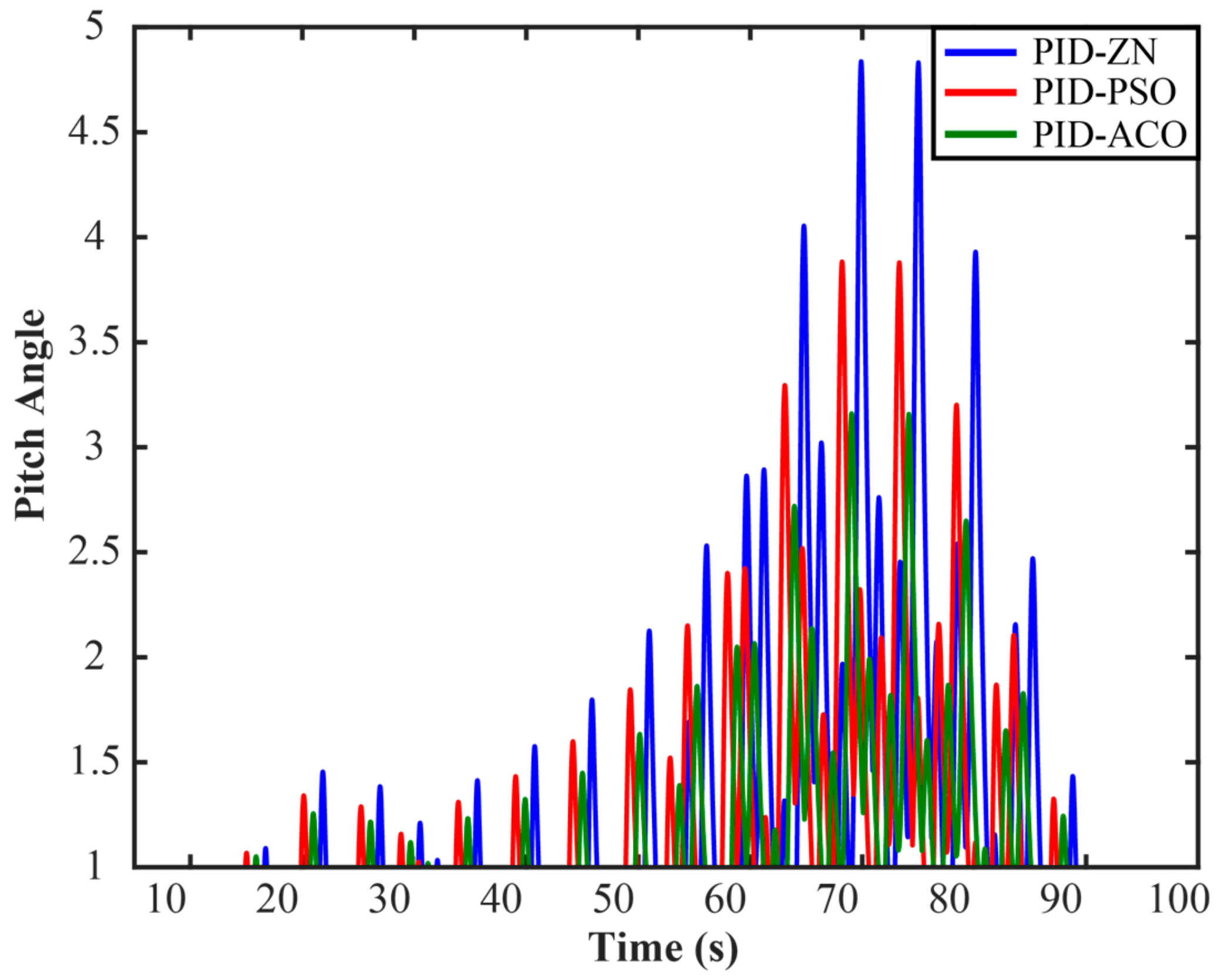
2.5. Controller Design
Proportional Integral Derivative Controller
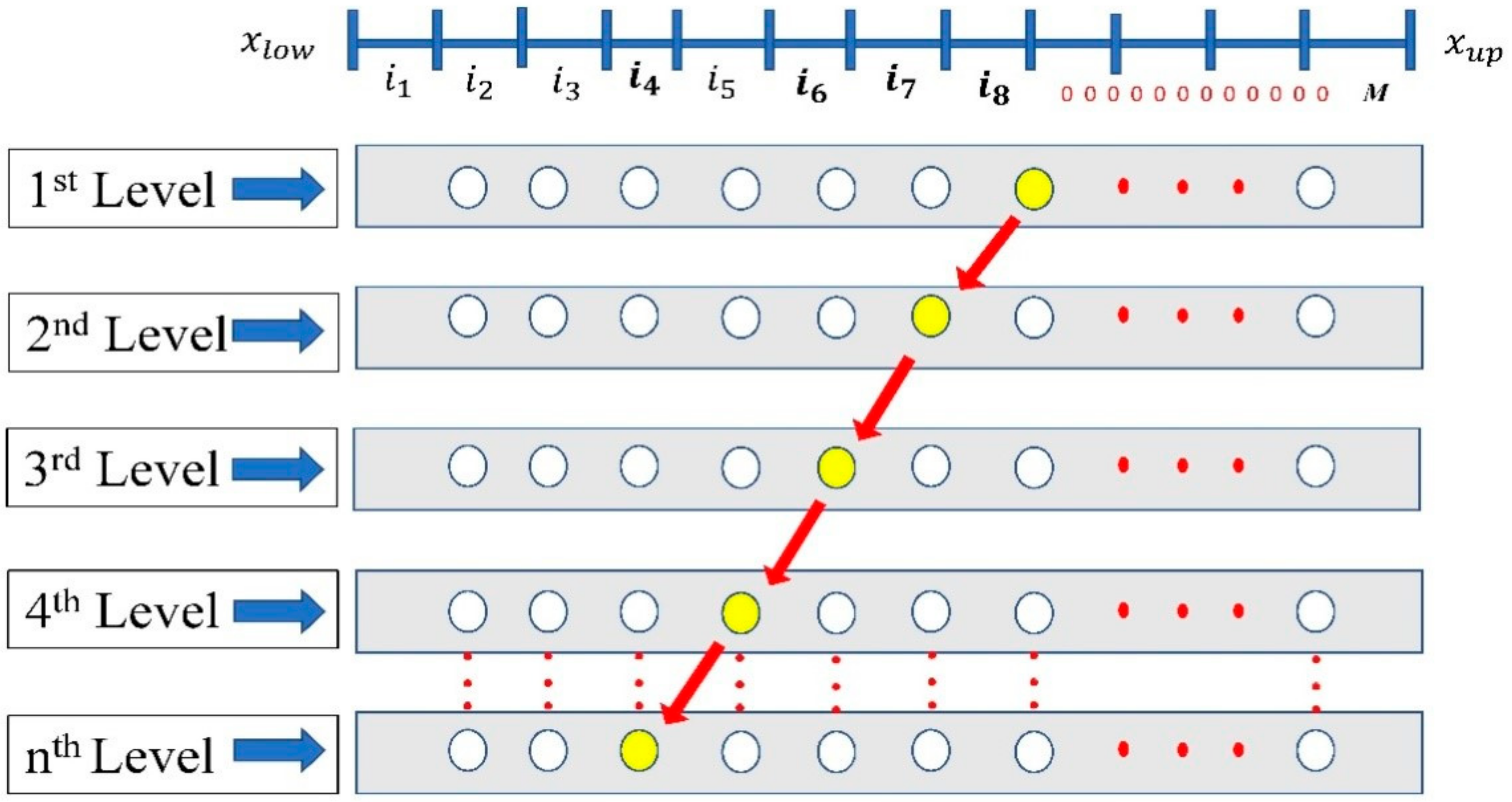
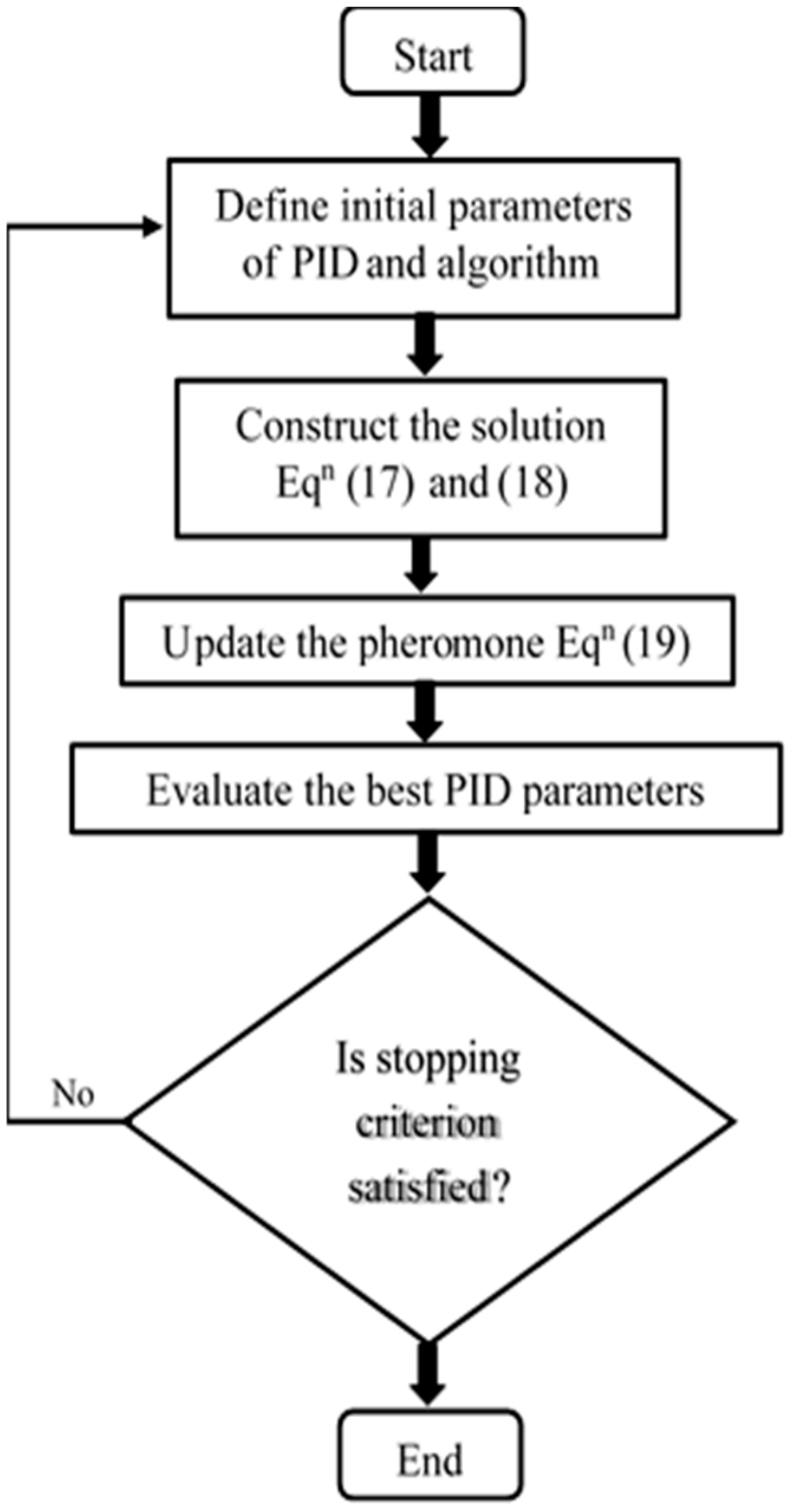
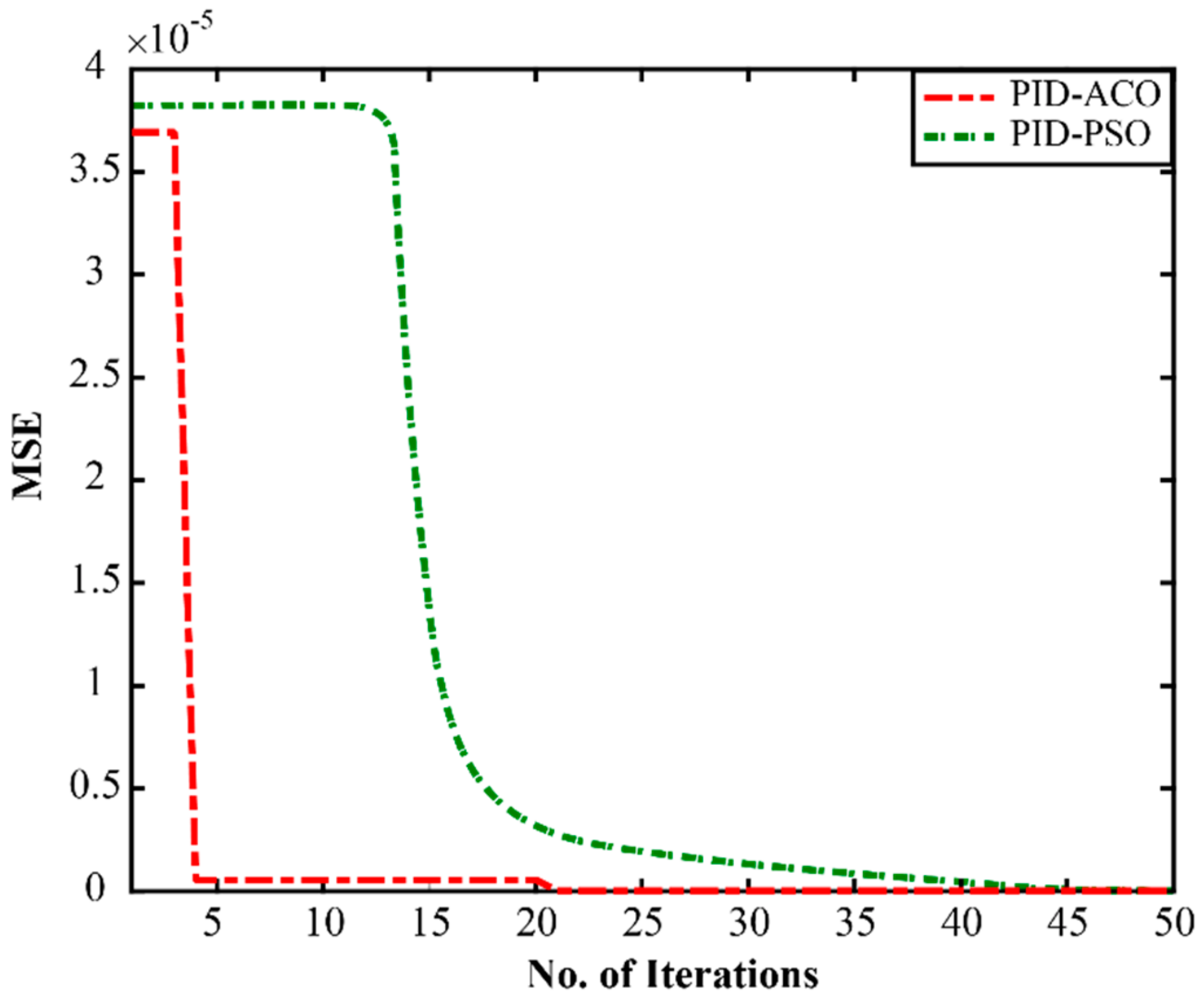
2.6. Ant Colony Algorithm
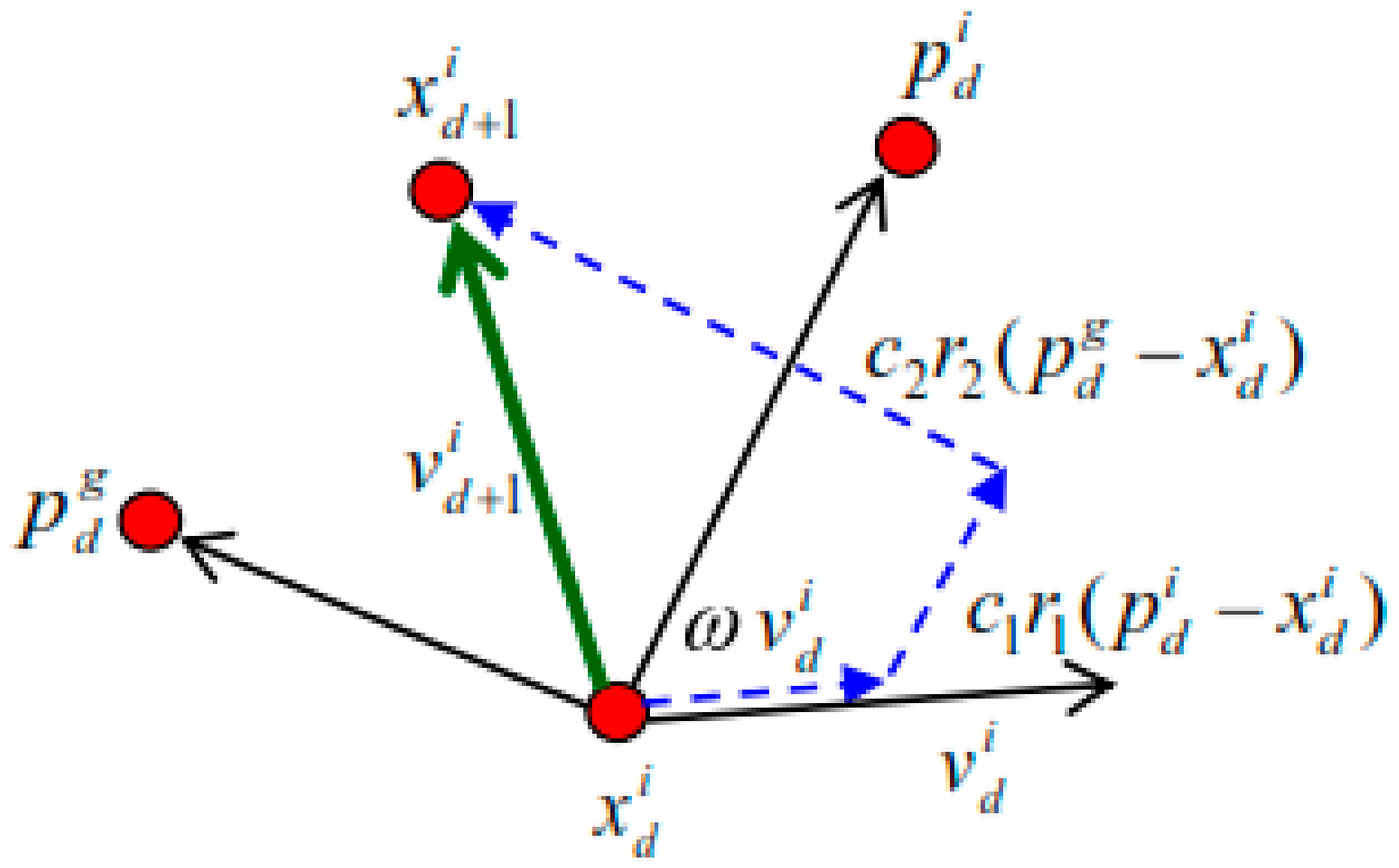
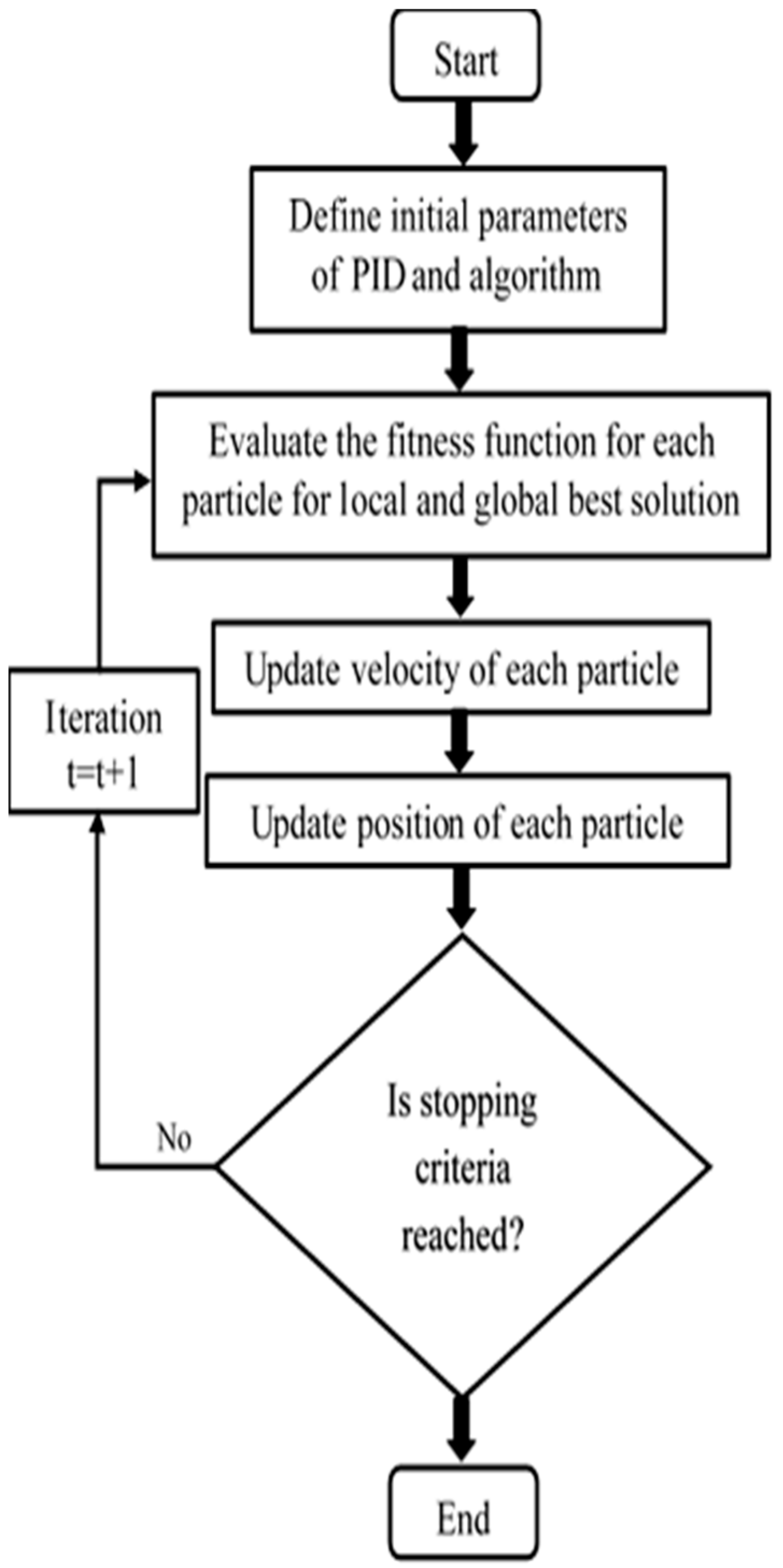
2.7. Particle Swarm Optimization
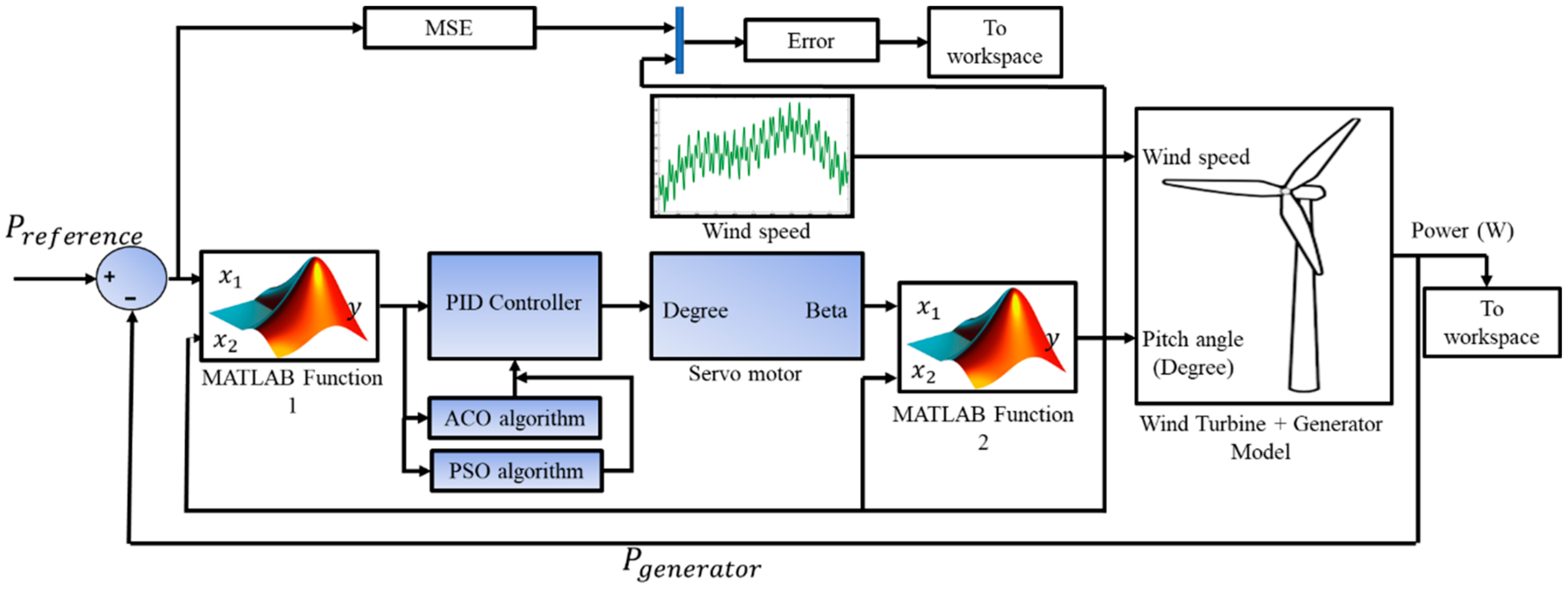
3. Simulation Evaluation
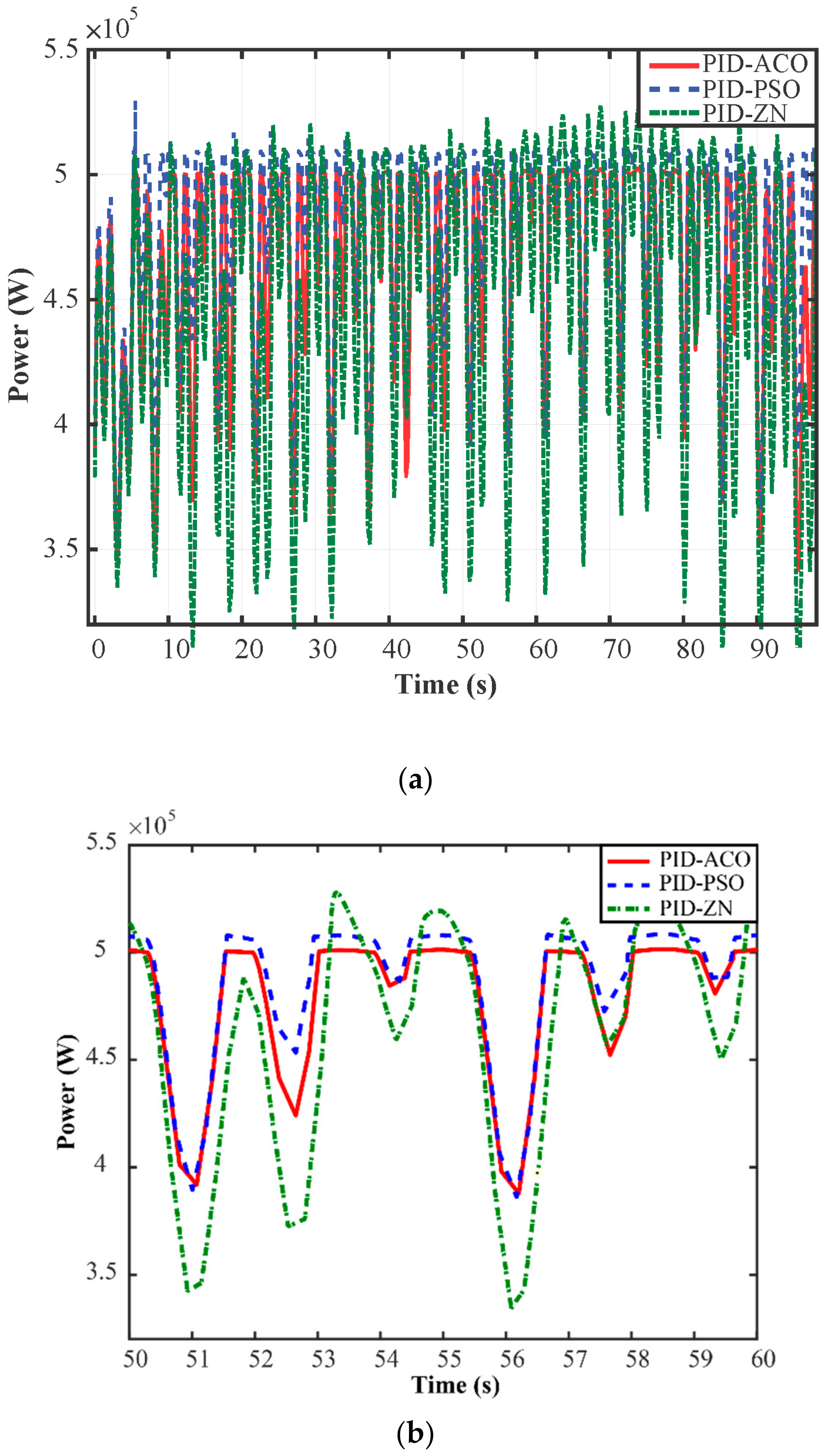
4. Result Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shoeb, M.A.; Shafiullah, G.M. Renewable energy integrated islanded microgrid for sustainable irrigation—A Bangladesh perspective. Energies 2018, 11, 1283. [Google Scholar] [CrossRef]
- Sarkar, R.; Julai, S.; Hossain, S.; Chong, W.T.; Rahman, M. A comparative study of activation functions of nar and narx neural network for long-term wind speed forecasting in malaysia. Math. Probl. Eng. 2019, 2019. [Google Scholar] [CrossRef]
- Astolfi, D.; Castellani, F.; Lombardi, A.; Terzi, L. About the extension of wind turbine power curve in the high wind region. J. Sol. Energy Eng. 2019, 141. [Google Scholar] [CrossRef]
- Assareh, E.; Biglari, M. A novel approach to capture the maximum power from variable speed wind turbines using pi controller, rbf neural network and gsa evolutionary algorithm. Renew. Sustain. Energy Rev. 2015, 51, 1023–1037. [Google Scholar] [CrossRef]
- Chen, Y.-J.; Shiah, Y. Experiments on the performance of small horizontal axis wind turbine with passive pitch control by disk pulley. Energies 2016, 9, 353. [Google Scholar] [CrossRef]
- Leithead, W.; Connor, B. Control of variable speed wind turbines: Design task. Int. J. Control. 2000, 73, 1189–1212. [Google Scholar] [CrossRef]
- Yin, X.-X.; Lin, Y.-G.; Li, W.; Gu, Y.-J.; Wang, X.-J.; Lei, P.-F. Design, modeling and implementation of a novel pitch angle control system for wind turbine. Renew. Energy 2015, 81, 599–608. [Google Scholar] [CrossRef]
- Dueñas-Osorio, L.; Basu, B. Unavailability of wind turbines due to wind-induced accelerations. Eng. Struct. 2008, 30, 885–893. [Google Scholar] [CrossRef]
- Ekelund, T. Speed control of wind turbines in the stall region. In Proceedings of the Third IEEE Conference on Control Applications,, Glasgow, UK, 24–26 August 1994; Volume 1, pp. 227–232. [Google Scholar]
- Shaked, U.; Soroka, E. On the stability robustness of the continuous-time lqg optimal control. IEEE Trans. Autom. Control. 1985, 30, 1039–1043. [Google Scholar] [CrossRef]
- Kong, Y.; Wang, Z.; Yuan, H. A new fuzzy sliding-mode control for mw variable speed-variable pitch wind turbine. In Proceedings of the 7th IET International Conference on Advances in Power System Control, Operation and Management (APSCOM 2006), Hong Kong, China, 30 October–2 November 2006. [Google Scholar]
- Amandola, C.; Gonzaga, D. Fuzzy-logic control system of a variable-speed variable-pitch wind-turbine and a double-fed induction generator. In Proceedings of the Presented at Intelligent Systems Design and Applications, 2007. ISDA 2007., Rio de Janeiro, Brazil, 20–24 October 2007; pp. 252–257. [Google Scholar]
- Gao, R.; Gao, Z. Pitch control for wind turbine systems using optimization, estimation and compensation. Renew. Energy 2016, 91, 501–515. [Google Scholar] [CrossRef]
- Perng, J.-W.; Chen, G.-Y.; Hsieh, S.-C. Optimal pid controller design based on pso-rbfnn for wind turbine systems. Energies 2014, 7, 191–209. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Chunliang, E.; Li, J.; Xu, H. Pitch control of large scale wind turbine based on fuzzy-pd method. In Proceedings of the Presented at Electric Utility Deregulation and Restructuring and Power Technologies, DRPT 2008, Nanjing, China, 6–9 April 2008; pp. 2447–2452. [Google Scholar]
- Dou, Z.; Cheng, M.; Ling, Z.; Cai, X. An adjustable pitch control system in a large wind turbine based on a fuzzy-pid controller. In Proceedings of the Presented at Power Electronics Electrical Drives Automation and Motion (SPEEDAM), Pisa, Italy, 14–16 June 2010; pp. 391–395. [Google Scholar]
- Iqbal, A.; Ying, D.; Saleem, A.; Hayat, M.A.; Mateen, M.; Javed, M.S. Proposed fls-pid wind turbine pitch control for efficacious output. In Proceedings of the International Symposium on Recent Advances in Electrical Engineering (RAEE), Islamabad, Pakistan, 28–29 August 2019. [Google Scholar]
- Civelek, Z.; Çam, E.; Lüy, M.; Mamur, H. Proportional–integral–derivative parameter optimisation of blade pitch controller in wind turbines by a new intelligent genetic algorithm. IET Renew. Power Gener. 2016, 10, 1220–1228. [Google Scholar] [CrossRef]
- Civelek, Z.J.E.S.; Technology, A.I.J. Optimization of fuzzy logic (takagi-sugeno) blade pitch angle controller in wind turbines by genetic algorithm. Eng. Sci. Technol. Int. J. 2020, 23, 1–9. [Google Scholar] [CrossRef]
- Karad, S.; Thakur, R. Comparative analysis of fractional-order pid controller for pitch angle control of wind turbine system. In Computing in Engineering and Technology; Springer: Berlin/Heidelberg, Germany, 2020; pp. 647–657. [Google Scholar]
- Gaing, Z.-L. A particle swarm optimization approach for optimum design of pid controller in avr system. IEEE Trans. Energy Convers. 2004, 19, 384–391. [Google Scholar] [CrossRef]
- Lanzafame, R.; Messina, M. Horizontal axis wind turbine working at maximum power coefficient continuously. Renew. Energy 2010, 35, 301–306. [Google Scholar] [CrossRef]
- Selig, M.S.; Coverstone-Carroll, V.L. Application of a genetic algorithm to wind turbine design. J. Energy Resour. Technol. 1996, 118, 22–28. [Google Scholar] [CrossRef]
- Jureczko, M.; Pawlak, M.; Mężyk, A. Optimisation of wind turbine blades. J. Mater. Process. Technol. 2005, 167, 463–471. [Google Scholar] [CrossRef]
- Khalfallah, M.G.; Koliub, A.M. Suggestions for improving wind turbines power curves. Desalination 2007, 209, 221–229. [Google Scholar] [CrossRef]
- Dabiri, J.O. Theoretical framework to surpass the betz limit using unsteady fluid mechanics. Phys. Rev. Fluids 2020, 5, 022501. [Google Scholar] [CrossRef]
- Bashetty, S.; Guillamon, J.I.; Mutnuri, S.S.; Ozcelik, S.J.E. Design of a robust adaptive controller for the pitch and torque control of wind turbines. Energies 2020, 13, 1195. [Google Scholar] [CrossRef]
- Slimen, A.; Tlijani, H.; Dhaoui, M.; Younes, R.B. Control of wind turbine based on pmsg using pitch angle control. In Modeling, Identification and Control Methods in Renewable Energy Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 151–165. [Google Scholar]
- Mousa, H.H.; Youssef, A.-R.; Mohamed, E.E.M. Optimal power extraction control schemes for five-phase pmsg based wind generation systems. Eng. Sci. Technol. Int. J. 2020, 23, 144–155. [Google Scholar]
- Tran, D.-H.; Sareni, B.; Roboam, X.; Espanet, C. Integrated optimal design of a passive wind turbine system: An experimental validation. IEEE Trans. Sustain. Energy 2010, 1, 48–56. [Google Scholar] [CrossRef]
- Qi, Y.; Meng, Q. The application of fuzzy pid control in pitch wind turbine. Energy Procedia 2012, 16, 1635–1641. [Google Scholar] [CrossRef]
- Valério, D.; da Costa, J.S. Tuning of fractional pid controllers with ziegler–nichols-type rules. Signal. Process. 2006, 86, 2771–2784. [Google Scholar] [CrossRef]
- Rahman, M.; Ong, Z.C.; Chong, W.T.; Julai, S.; Ng, X.W. Wind turbine tower modeling and vibration control under different types of loads using ant colony optimized pid controller. Arab. J. Sci. Eng. 2019, 44, 707–720. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M. Ant colonies for the travelling salesman problem. BioSystems 1997, 43, 73–81. [Google Scholar] [CrossRef]
- Jalil, N.; Julai, S.; Ramli, R. Parametric modelling of flexible plate structures using continuous ant colony optimization. J. Simul. 2015, 9, 223–231. [Google Scholar] [CrossRef]
- Sarkar, M.; Julai, S.; Tong, C.W.; Toha, S.F. Effectiveness of nature-inspired algorithms using anfis for blade design optimization and wind turbine efficiency. Symmetry 2019, 11, 456. [Google Scholar] [CrossRef]
- Galdi, V.; Piccolo, A.; Siano, P. Designing an adaptive fuzzy controller for maximum wind energy extraction. IEEE Trans. Energy Convers. 2008, 23, 559–569. [Google Scholar] [CrossRef]
- Bai, Q. Analysis of particle swarm optimization algorithm. Comput. Inf. Sci. 2010, 3, 180. [Google Scholar] [CrossRef]
- Kennedy, J. Handbook of Nature-Inspired and Innovative Computing; Springer: Berlin/Heidelberg, Germany, 2006; pp. 187–219. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Zhou, W.; Zou, C.; Li, J.; Li, G. Dynamic modeling and coordinate control for an engine-generator set. In Proceedings of the 19th Asia Pacific Automotive Engineering Conference (SAE)-China Congress: Selected Papers; Springer: Berlin/Heidelberg, Germany, 2017; pp. 1015–1033. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Turbine Parameters | ||
|---|---|---|
| Parameters | Value | Unit |
| Nominal output power | 500 | kW |
| Cut-in wind speed | 3 | m/s |
| Working mode | Network connection | - |
| Nominal wind speed | 12 m/s | m/s |
| Cut-out wind speed | 25 m/s | m/s |
| Rotor diameter | 48 m | m |
| Sweep area | ||
| Blade number | 3 | - |
| Nominal rotor speed | 30 rpm | rpm |
| Rotor speed range | 10–30 rpm | rpm |
| Gear box rate | 01:50 | - |
| Generator number | 1 | - |
| Generator type | PMSG | - |
| Generator nominal output | 500 | kW |
| Generator nominal cycle | 1500 | rpm |
| Generator voltage | 690 V | V |
| Nominal frequency | 50 | Hz |
| d-axis inductance | 0.0045 | mH |
| q-axis inductance | 0.0045 | mH |
| d-axis resistance | 0.017 | Ω |
| q-axis resistance | 0.017 | Ω |
| Generator inertia | 0.489 | |
| Permanent magnet linkage flux | 0.175 | Wb |
| Pole pairs | 6 | - |
| Algorithms | Parameters | Value |
|---|---|---|
| ACO | Number of iterations | 100 |
| Number of ants | 50 | |
| Node | 10 | |
| Pheromone quantity (Q) | 100 | |
| Decay Parameter | 8.5 | |
| PSO | Number of iterations | 100 |
| Population size | 10 | |
| Constants of acceleration ( and ) | 1.5 | |
| Minimum inertia weight | 0.9 | |
| Maximum inertia weight | 0.4 | |
| Dimension | 03 |
| Controller Gain | PID-ZN Method | PSO Method | ACO Method |
|---|---|---|---|
| Methods | Root Mean Square (RMS) |
|---|---|
| PID-ACO | 0.00036 |
| PID-PSO | 0.0020 |
| PID-ZN | 0.0035 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarkar, M.R.; Julai, S.; Tong, C.W.; Uddin, M.; Romlie, M.F.; Shafiullah, G. Hybrid Pitch Angle Controller Approaches for Stable Wind Turbine Power under Variable Wind Speed. Energies 2020, 13, 3622. https://doi.org/10.3390/en13143622
Sarkar MR, Julai S, Tong CW, Uddin M, Romlie MF, Shafiullah G. Hybrid Pitch Angle Controller Approaches for Stable Wind Turbine Power under Variable Wind Speed. Energies. 2020; 13(14):3622. https://doi.org/10.3390/en13143622
Chicago/Turabian StyleSarkar, Md Rasel, Sabariah Julai, Chong Wen Tong, Moslem Uddin, M.F. Romlie, and GM Shafiullah. 2020. "Hybrid Pitch Angle Controller Approaches for Stable Wind Turbine Power under Variable Wind Speed" Energies 13, no. 14: 3622. https://doi.org/10.3390/en13143622
APA StyleSarkar, M. R., Julai, S., Tong, C. W., Uddin, M., Romlie, M. F., & Shafiullah, G. (2020). Hybrid Pitch Angle Controller Approaches for Stable Wind Turbine Power under Variable Wind Speed. Energies, 13(14), 3622. https://doi.org/10.3390/en13143622