Inkjet 3D Printed MEMS Vibrational Electromagnetic Energy Harvester




Abstract
:
1. Introduction
2. Materials and Methods
2.1. Design and Numerical Simulations
2.2. Inkjet 3D Printing
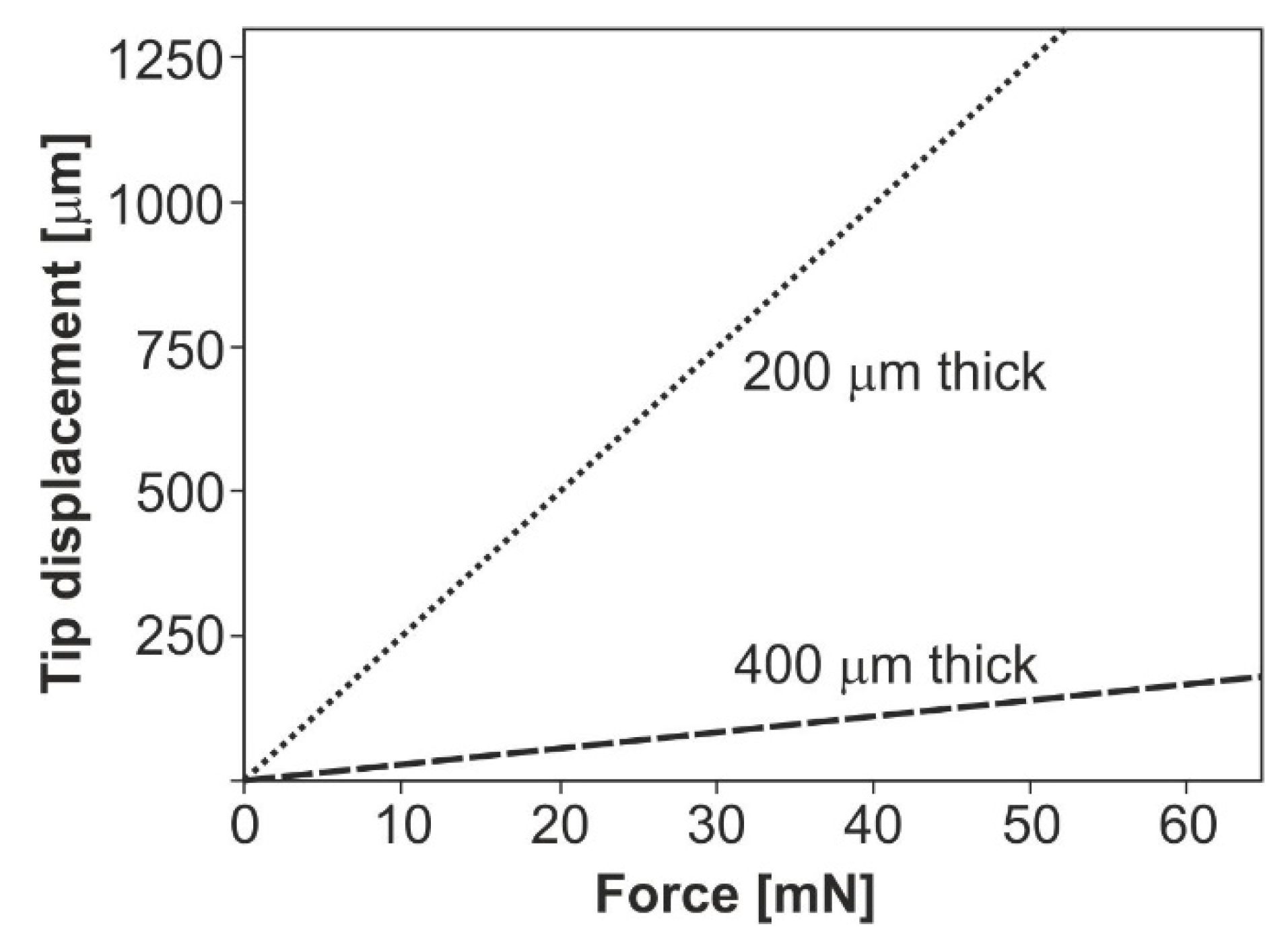
2.3. Determination of Young’s Modulus
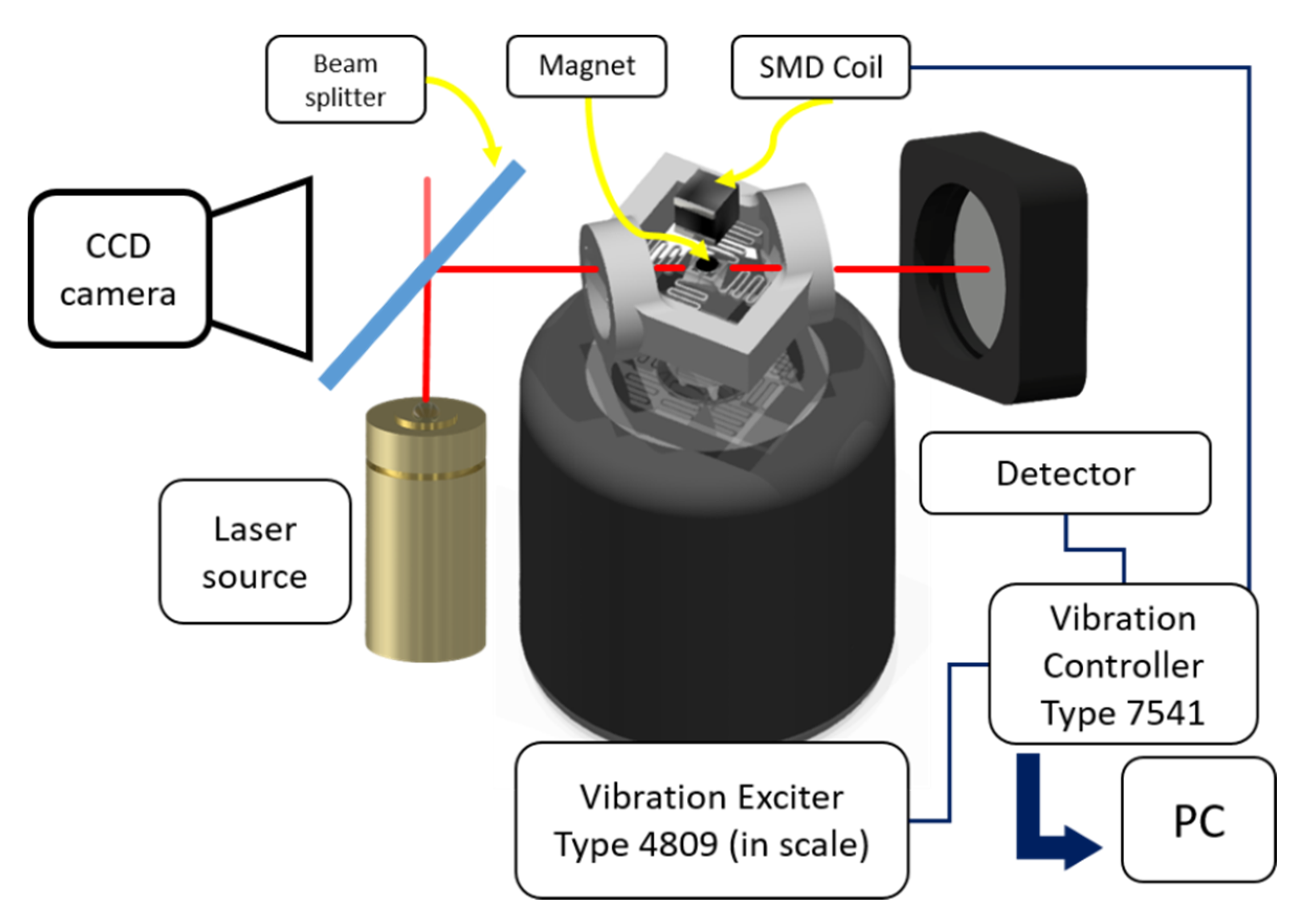
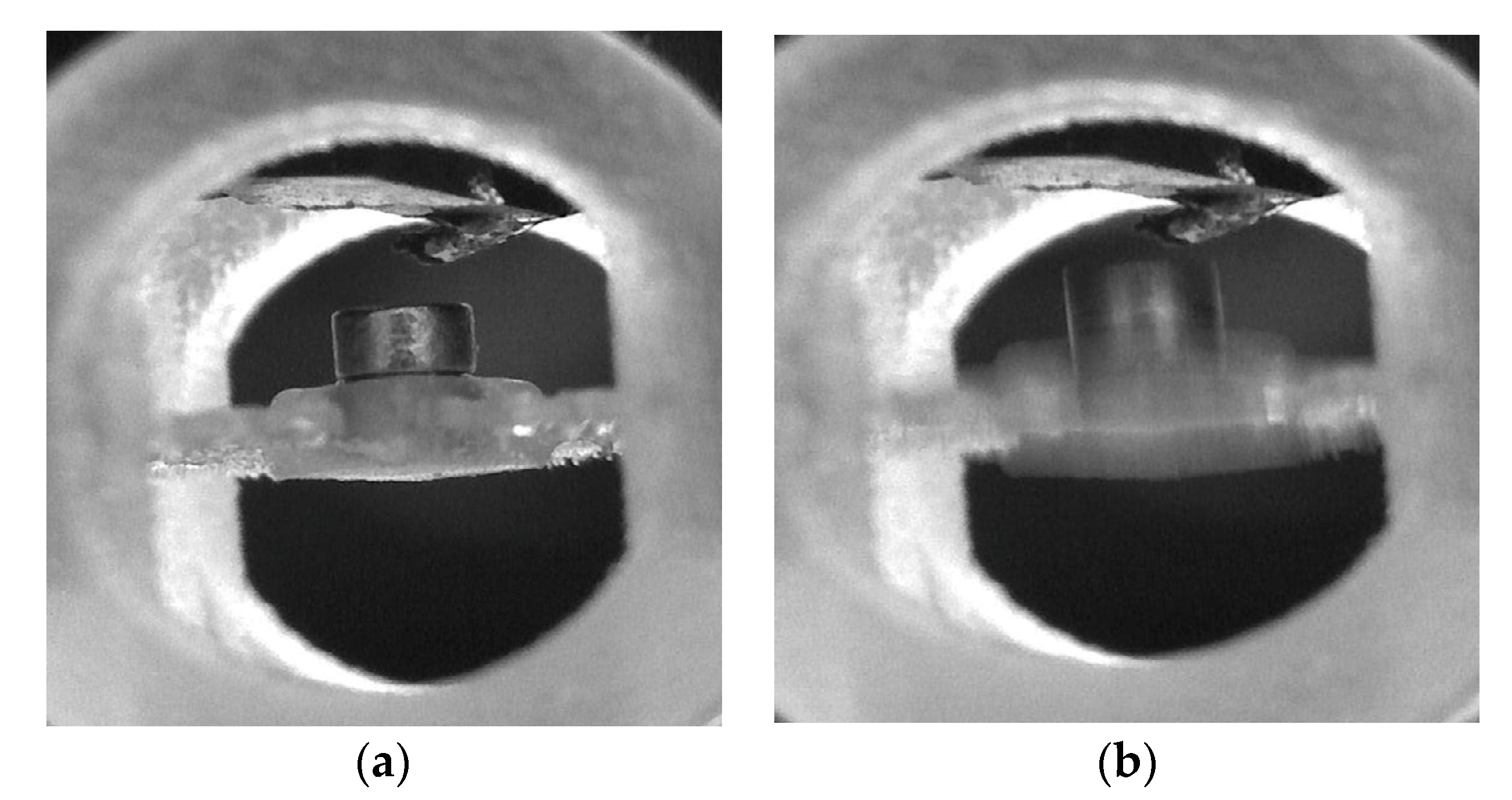
2.4. Measurement Setup
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dziuban, J.A. Bonding in Microsystem Technology; Springer Science and Business Media LLC: Berlin, Germany, 2006. [Google Scholar]
- Esashi, M.; Takinami, M.; Wakabayashi, Y.; Minami, K. High-rate directional deep dry etching for bulk silicon micromachining. J. Micromech. Microeng. 1995, 5, 5–10. [Google Scholar] [CrossRef]
- Shikida, M.; Sato, K.; Tokoro, K.; Uchikawa, D. Differences in anisotropic etching properties of KOH and TMAH solutions. Sens. Actuators A Phys. 2000, 80, 179–188. [Google Scholar] [CrossRef]
- Becker, H.; Gärtner, C. Polymer microfabrication technologies for microfluidic systems. Anal. Bioanal. Chem. 2007, 390, 89–111. [Google Scholar] [CrossRef]
- Sollier, E.; Murray, C.; Maoddi, P.; Di Carlo, D. Rapid prototyping polymers for microfluidic devices and high pressure injections. Lab Chip 2011, 11, 3752. [Google Scholar] [CrossRef]
- Eddings, M.A.; Johnson, M.A.; Gale, B.K. Determining the optimal PDMS–PDMS bonding technique for microfluidic devices. J. Micromech. Microeng. 2008, 18, 67001. [Google Scholar] [CrossRef]
- Unger, M.A. Monolithic microfabricated valves and pumps by multilayer soft lithography. Science 2000, 288, 113–116. [Google Scholar] [CrossRef] [Green Version]
- Golonka, L. Technology and applications of Low Temperature Cofired Ceramic (LTCC) based sensors and microsystems. Bull. Polish Acad. Sci. Tech. Sci. 2006, 54, 221–231. [Google Scholar]
- Bryzek, J. Trillion Sensors Movement in Support of Abundance and Internet of Everything. In Proceedings of the Materials of Sensors Conference, Santa Clara, CA, USA, 6 March 2014. [Google Scholar]
- Bhattacharjee, N.; Urrios, A.; Kang, S.; Folch, A. The upcoming 3D-printing revolution in microfluidics. Lab Chip 2016, 16, 1720–1742. [Google Scholar] [CrossRef] [Green Version]
- Waldbaur, A.; Rapp, H.; Länge, K.; Rapp, B.E. Let there be chip—Towards rapid prototyping of microfluidic devices: One-step manufacturing processes. Anal. Methods 2011, 3, 2681. [Google Scholar] [CrossRef]
- Bhargava, K.C.; Thompson, B.; Malmstadt, N. Discrete elements for 3D microfluidics. Proc. Natl. Acad. Sci. USA 2014, 111, 15013–15018. [Google Scholar] [CrossRef] [Green Version]
- Au, A.K.; Lee, W.; Folch, A. Mail-order microfluidics: Evaluation of stereolithography for the production of microfluidic devices. Lab Chip 2014, 14, 1294–1301. [Google Scholar] [CrossRef] [Green Version]
- O’Neill, P.; Ben Azouz, A.; Vazquez, M.; Liu, J.; Marczak, S.; Slouka, Z.; Chang, H.C.; Diamond, D.; Brabazon, D. Advances in three-dimensional rapid prototyping of microfluidic devices for biological applications. Biomicrofluidics 2014, 8, 052112. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Wu, X.; Guo, X.; Kong, B.; Zhang, M.; Qian, X.; Mi, S.; Sun, W. The boom in 3D-printed sensor technology. Sensors 2017, 17, 1166. [Google Scholar] [CrossRef]
- Walczak, R. Inkjet 3D printing–towards new micromachining tool for MEMS fabrication. Bull. Polish Acad. Sci. Tech. Sci. 2018, 66, 179–186. [Google Scholar]
- Rogers, C.I.; Qaderi, K.; Woolley, A.T.; Nordin, G.P. 3D printed microfluidic devices with integrated valves. Biomicrofluidics 2015, 9, 016501. [Google Scholar] [CrossRef]
- Au, A.K.; Bhattacharjee, N.; Horowitz, L.F.; Chang, T.C.; Folch, A. 3D-printed microfluidic automation. Lab Chip 2015, 15, 1934–1941. [Google Scholar] [CrossRef]
- Podwin, A.; Walczak, R.; Dziuban, J.A. A 3D printed membrane-based gas microflow regulator for on-chip cell culture. Appl. Sci. 2018, 8, 579. [Google Scholar] [CrossRef] [Green Version]
- Song, K.; Lee, H.; Cha, Y. A v-shaped actuator utilizing electrostatic force. Actuators 2018, 7, 30. [Google Scholar] [CrossRef] [Green Version]
- Hu, T.; Zhao, Y.-L.; Zhao, Y.; Ren, W. Integration design of a MEMS based fuze. Sens. Actuators Phys. 2017, 268, 193–200. [Google Scholar] [CrossRef]
- Aspar, G.; Goubault, B.; Lebaigue, O.; Souriau, J.-C.; Simon, G.; Di Cioccio, L.; Brechet, Y. 3D printing as a new packaging approach for MEMS and electronic devices. In Proceedings of the 2017 IEEE 67th Electronic Components and Technology Conference (ECTC), Orlando, FL, USA, 30 May–2 June 2017; pp. 1071–1079. [Google Scholar]
- Toshiyoshi, H.; Ju, S.; Honma, H.; Ji, C.-H.; Fujita, H. MEMS vibrational energy harvesters. Sci. Technol. Adv. Mater. 2019, 20, 124–143. [Google Scholar] [CrossRef] [Green Version]
- Torah, R.; Glynne-Jones, P.; Tudor, M.; O’Donnell, T.; Roy, S.; Beeby, S.P. Self-powered autonomous wireless sensor node using vibration energy harvesting. Meas. Sci. Technol. 2008, 19, 125202. [Google Scholar] [CrossRef]
- Aktakka, E.E.; Najafi, K. A micro inertial energy harvesting platform with self-supplied power management circuit for autonomous wireless sensor nodes. IEEE J. Solid-State Circuits 2014, 49, 2017–2029. [Google Scholar] [CrossRef]
- Sano, C.; Mitsuya, H.; Ono, S.; Miwa, K.; Toshiyoshi, H.; Fujita, H. Triboelectric energy harvesting with surface-charge-fixed polymer based on ionic liquid. Sci. Technol. Adv. Mater. 2018, 19, 317–323. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sakane, Y.; Suzuki, Y.; Kasagi, N. The development of a high-performance perfluorinated polymer electret and its application to micro power generation. J. Micromech. Microeng. 2008, 18, 104011. [Google Scholar] [CrossRef] [Green Version]
- Ju, S.; Ji, C.-H. Impact-based piezoelectric vibration energy harvester. Appl. Energ. 2018, 214, 139–151. [Google Scholar] [CrossRef]
- Maharjan, P.; Cho, H.; Rasel, M.; Salauddin, M.; Park, J.Y. A fully enclosed, 3D printed, hybridized nanogenerator with flexible flux concentrator for harvesting diverse human biomechanical energy. Nano Energ. 2018, 53, 213–224. [Google Scholar] [CrossRef]
- Seol, M.-L.; Ivaškevičiūtė-Povilauskienė, R.; Ciappesoni, M.A.; Thompson, F.V.; Moon, D.-I.; Kim, S.J.; Han, J.-W.; Meyyappan, M.; Kim, S.J. All 3D printed energy harvester for autonomous and sustainable resource utilization. Nano Energy 2018, 52, 271–278. [Google Scholar] [CrossRef]
- Seol, M.-L.; Han, J.-W.; Moon, D.-I.; Yoon, K.J.; Hwang, C.S.; Meyyappan, M. All-printed triboelectric nanogenerator. Nano Energ. 2018, 44, 82–88. [Google Scholar] [CrossRef]
- Hadas, Z.; Zouhar, J.; Singule, V.; Ondrusek, C. Design of energy harvesting generator base on rapid prototyping parts. In Proceedings of the 2008 13th International Power Electronics and Motion Control Conference, Poznan, Poland, 1–3 September 2008; pp. 1665–1669. [Google Scholar]
- Rubes, O.; Smilek, J.; Hadas, Z. Development of vibration energy harvester fabricated by rapid prototyping technology. In Proceedings of the 16th International Conference on Mechatronics—Mechatronika 2014, Brno, Czech Republic, 3–5 December 2014; pp. 178–182. [Google Scholar]
- Bowers, B.; Arnold, D. Spherical magnetic generator for bio-motional energy harvesting. In Proceedings of the PowerMEMS 2008 Conference, Sendai, Japan, 9–12 November 2008; pp. 281–284. [Google Scholar]
- Constantinou, P.; Roy, S. A 3D printed electromagnetic nonlinear vibration energy harvester. Smart Mater. Struct. 2016, 25, 95053. [Google Scholar] [CrossRef] [Green Version]
- Walczak, R.; Adamski, K.; Lizanets, D. Inkjet 3D printed check microvalve. J. Micromech. Microeng. 2017, 27, 047002. [Google Scholar] [CrossRef]
- Walczak, R.; Kawa, B.; Adamski, K. Inkjet 3D printed microfluidic device for growing seed root and stalk mechanical characterization. Sens. Actuators Phys. 2019, 297, 111557. [Google Scholar] [CrossRef]
- Saleh, E.; Woolliams, P.; Clarke, B.; Gregory, A.; Greedy, S.; Smartt, C.; Wildman, R.D.; Ashcroft, I.; Hague, R.; Dickens, P.; et al. 3D inkjet-printed UV-curable inks for multi-functional electromagnetic applications. Addit. Manuf. 2017, 13, 143–148. [Google Scholar] [CrossRef]
- Palmero, E.; Rial, J.; De Vicente, J.; Camarero, J.; Skarman, B.; Vidarsson, H.; Larsson, P.-O.; Bollero, A. Development of permanent magnet MnAIC/polymer composites and flexible filament for bonding and 3D-printing technologies. Sci. Technol. Adv. Mater. 2018, 19, 465–473. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Huber, C.; Hu, J.; He, J.; Suess, D.; Wang, S.X. An electrodynamic energy harvester with a 3D printed magnet and optimized topology. Appl. Phys. Lett. 2019, 114, 013902. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Visualisation of the Harvester Structure and Number of Magnets | Number of Magnets, Spring Dimensions (Height × Width [m]), and Rotation Coefficient | Simulated Resonant Frequency [Hz] for Young’s Modulus 2240/1463 MPa | Measured Resonant Frequency [Hz] | Maximal Peak-to-Peak Voltage [mV] | Band Width [Hz] | Maximal Output Power [W] | Active Volume [cm3] | Power Density [μW/cm3] |
|---|---|---|---|---|---|---|---|---|
 | Two magnets, 400 × 400, 1.62 | 103/92 | 100 | 420 | 6 | 23.7 | 0.0596 | 397 |
 | One magnet, 200 × 200, 1.62 | 98/87 | 95 | 60 | 8 | 7.2 | 0.0284 | 253 |
 | One magnet, 200 × 200 | 134/117 | 130 | 254 | 23 | 12.6 | 0.0212 | 594 |
 | One magnet, 200 × 1300 | 321/255 | 340 | 260 | 20 | 12.7 | 0.0486 | 261 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kawa, B.; Śliwa, K.; Lee, V.C.; Shi, Q.; Walczak, R. Inkjet 3D Printed MEMS Vibrational Electromagnetic Energy Harvester. Energies 2020, 13, 2800. https://doi.org/10.3390/en13112800
Kawa B, Śliwa K, Lee VC, Shi Q, Walczak R. Inkjet 3D Printed MEMS Vibrational Electromagnetic Energy Harvester. Energies. 2020; 13(11):2800. https://doi.org/10.3390/en13112800
Chicago/Turabian StyleKawa, Bartosz, Krzysztof Śliwa, Vincent Ch. Lee, Qiongfeng Shi, and Rafał Walczak. 2020. "Inkjet 3D Printed MEMS Vibrational Electromagnetic Energy Harvester" Energies 13, no. 11: 2800. https://doi.org/10.3390/en13112800
APA StyleKawa, B., Śliwa, K., Lee, V. C., Shi, Q., & Walczak, R. (2020). Inkjet 3D Printed MEMS Vibrational Electromagnetic Energy Harvester. Energies, 13(11), 2800. https://doi.org/10.3390/en13112800