An Empirical Study on Low Emission Taxiing Path Optimization of Aircrafts on Airport Surfaces from the Perspective of Reducing Carbon Emissions



Abstract
:1. Introduction
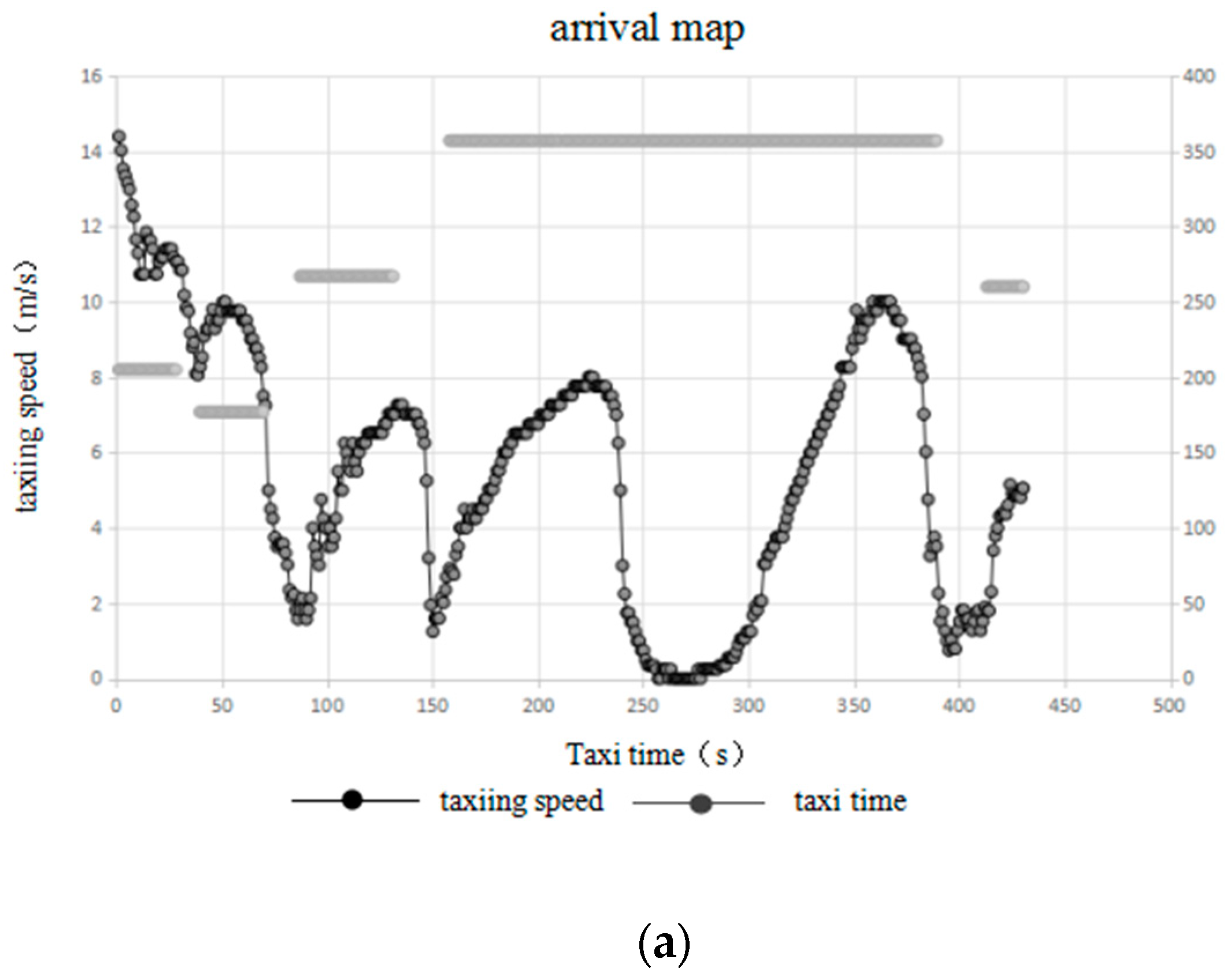
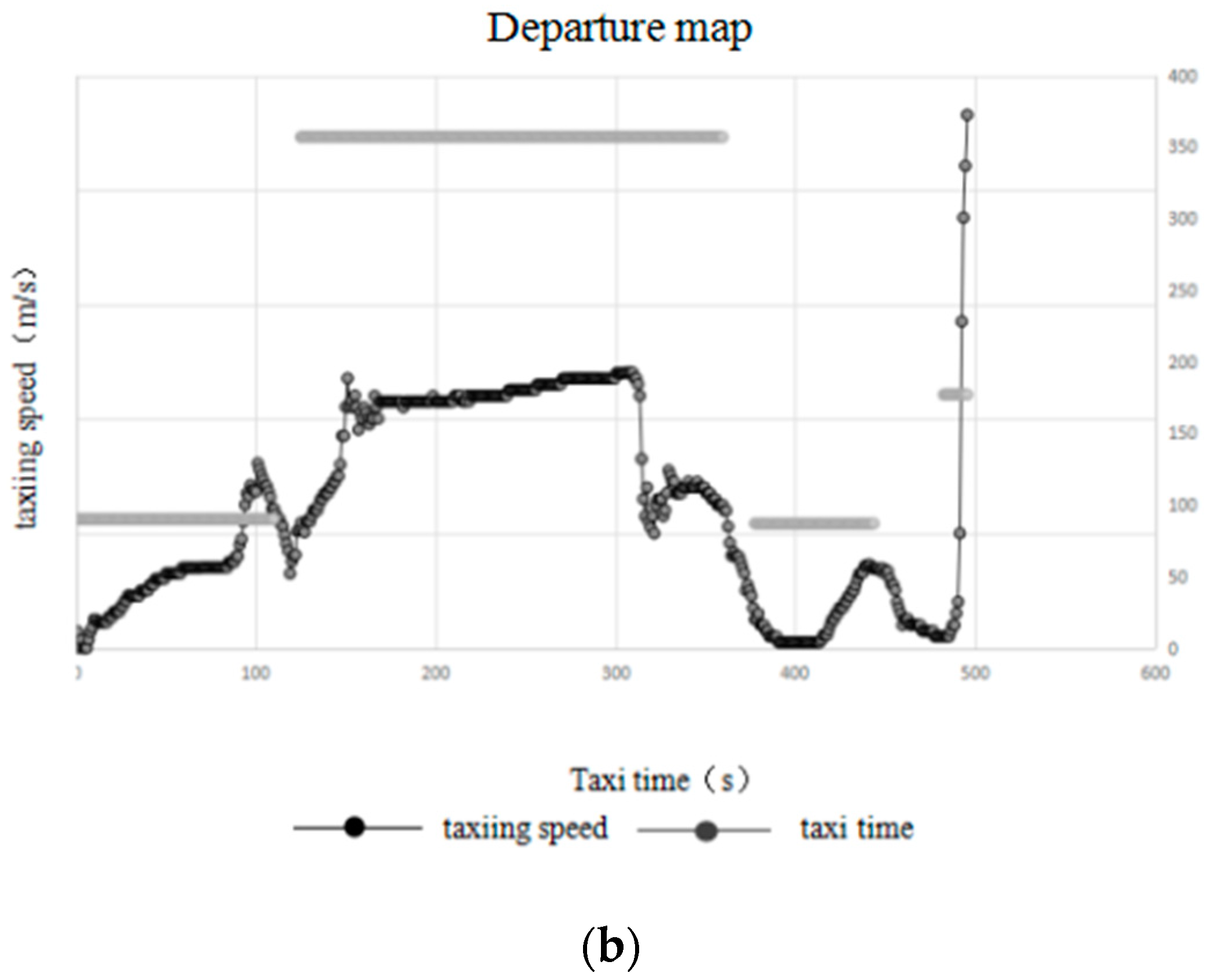
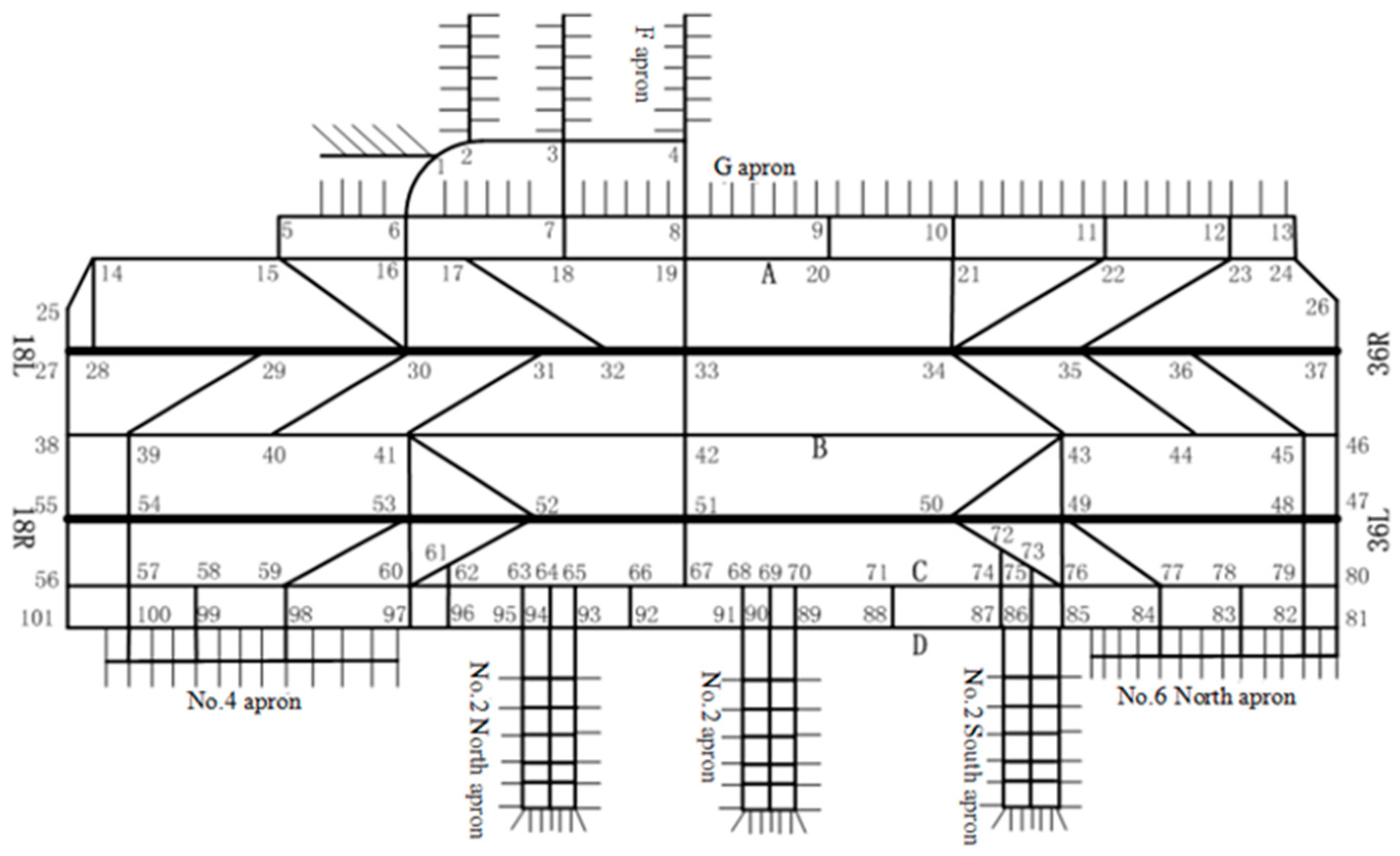
2. Analysis of Airport Surface Movement of the Aircraft
3. Establishing the Path Planning Model
3.1. Setting Model Variables
3.2. Building Objective Functions
3.3. Construction of Aircraft Taxiing Dynamic Model
3.4. Building Constraint Functions
3.4.1. Intersection Conflict and Vortex Separation Constraints
3.4.2. Head-on Conflict Constraint
3.4.3. Tail Conflict
4. Solving the Path Planning Model
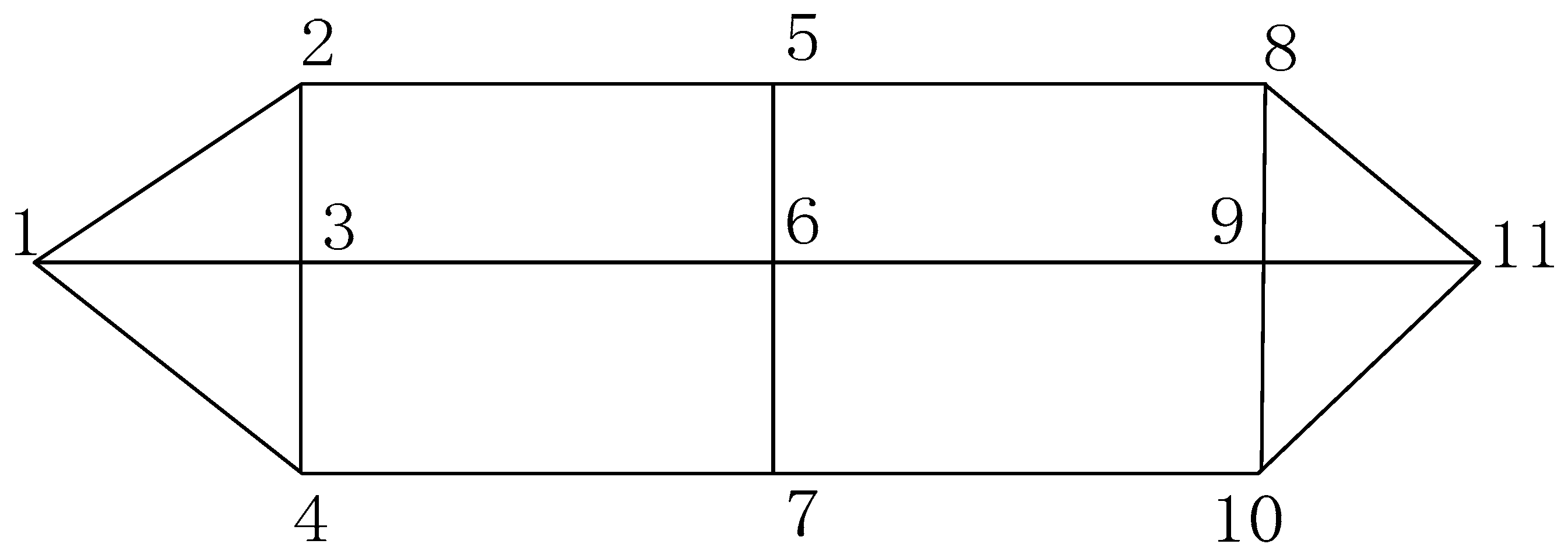
4.1. Chromosome Coding and Initial Population Generation
4.2. Selecting the Operation and Fitness Function
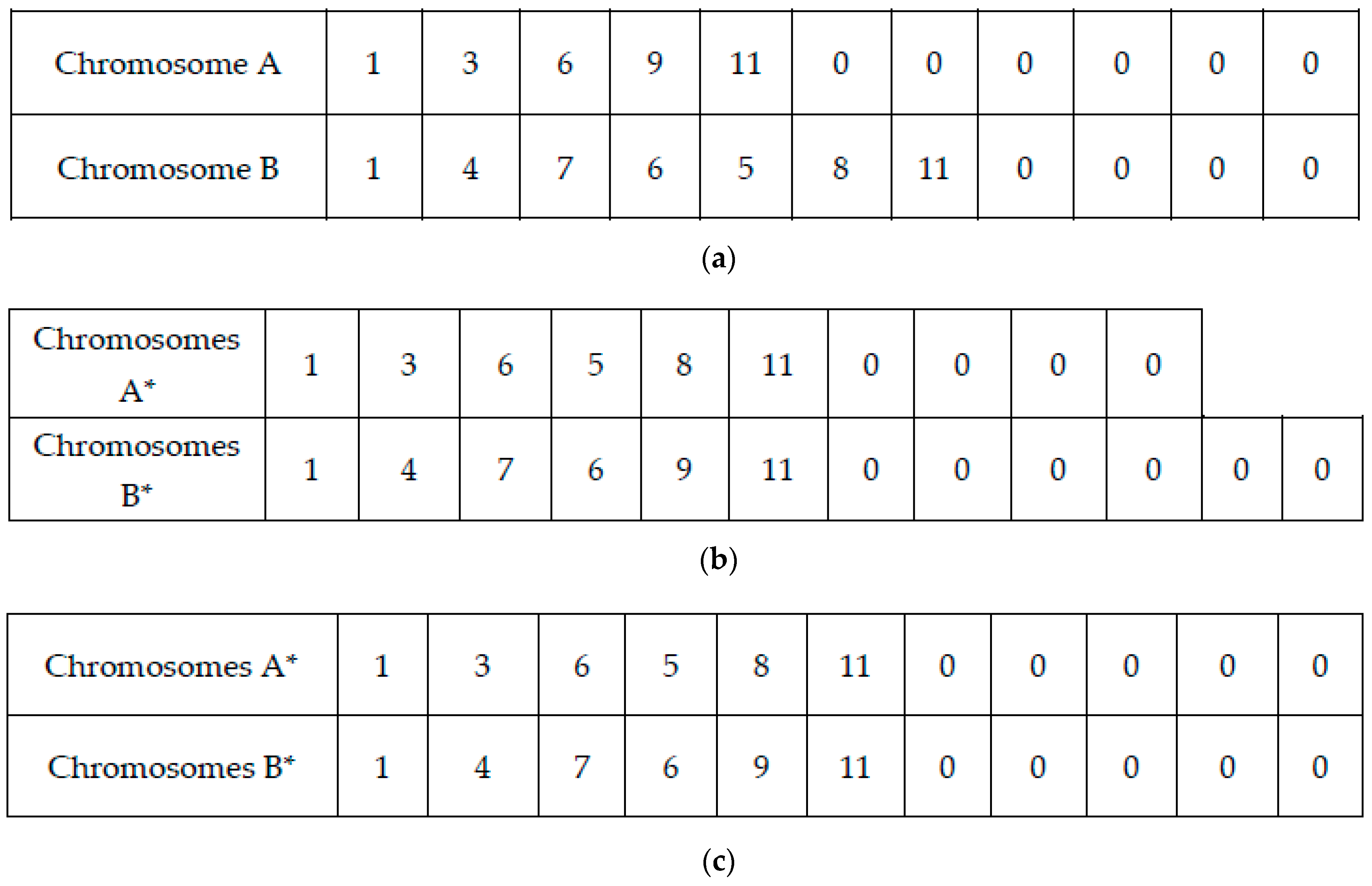
4.3. Crossover Operations
4.4. Mutation Operation
5. Emulation Experiment
5.1. Data Description
5.2. Parameter Settings
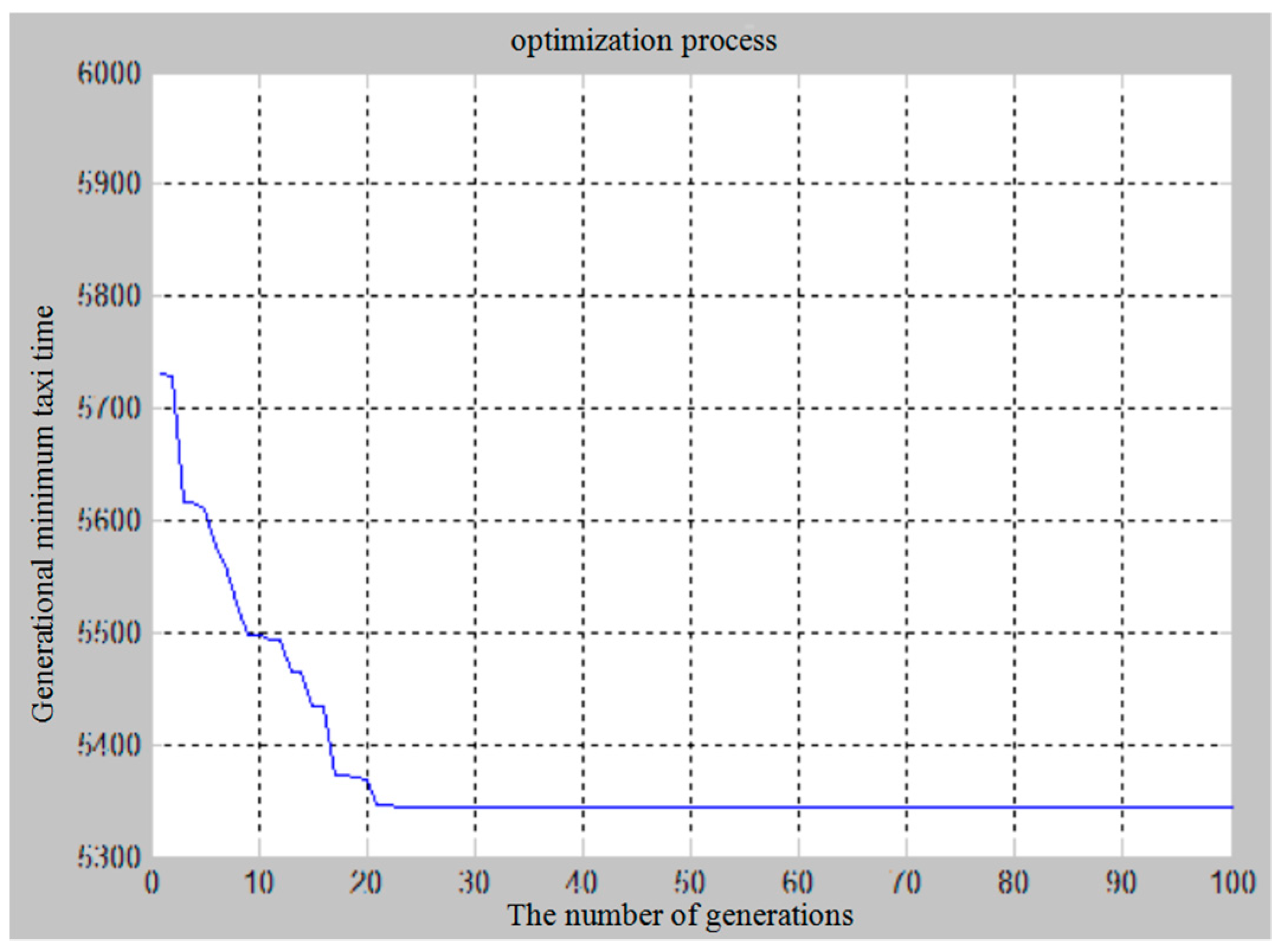
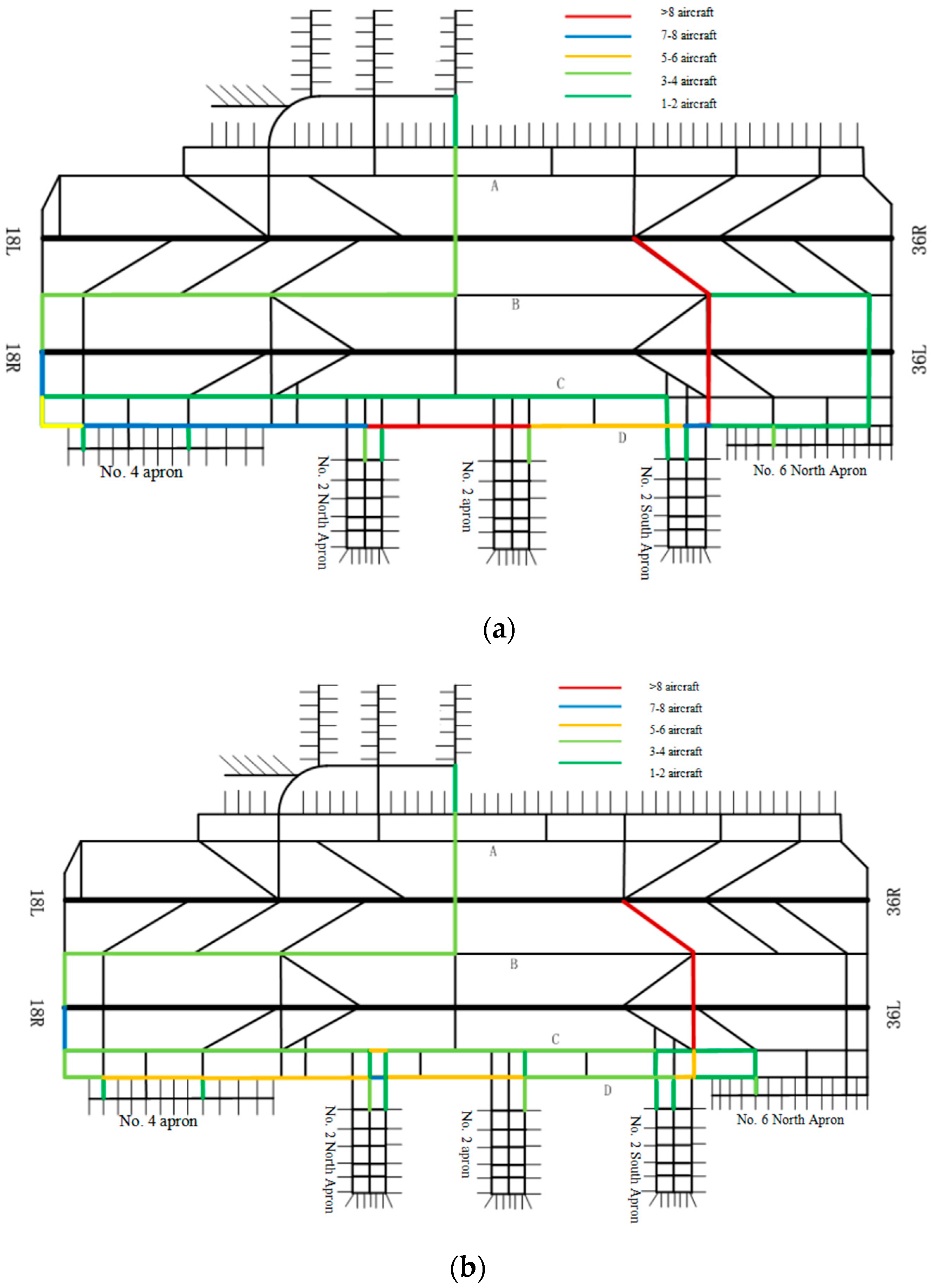
5.3. Analysis of Results
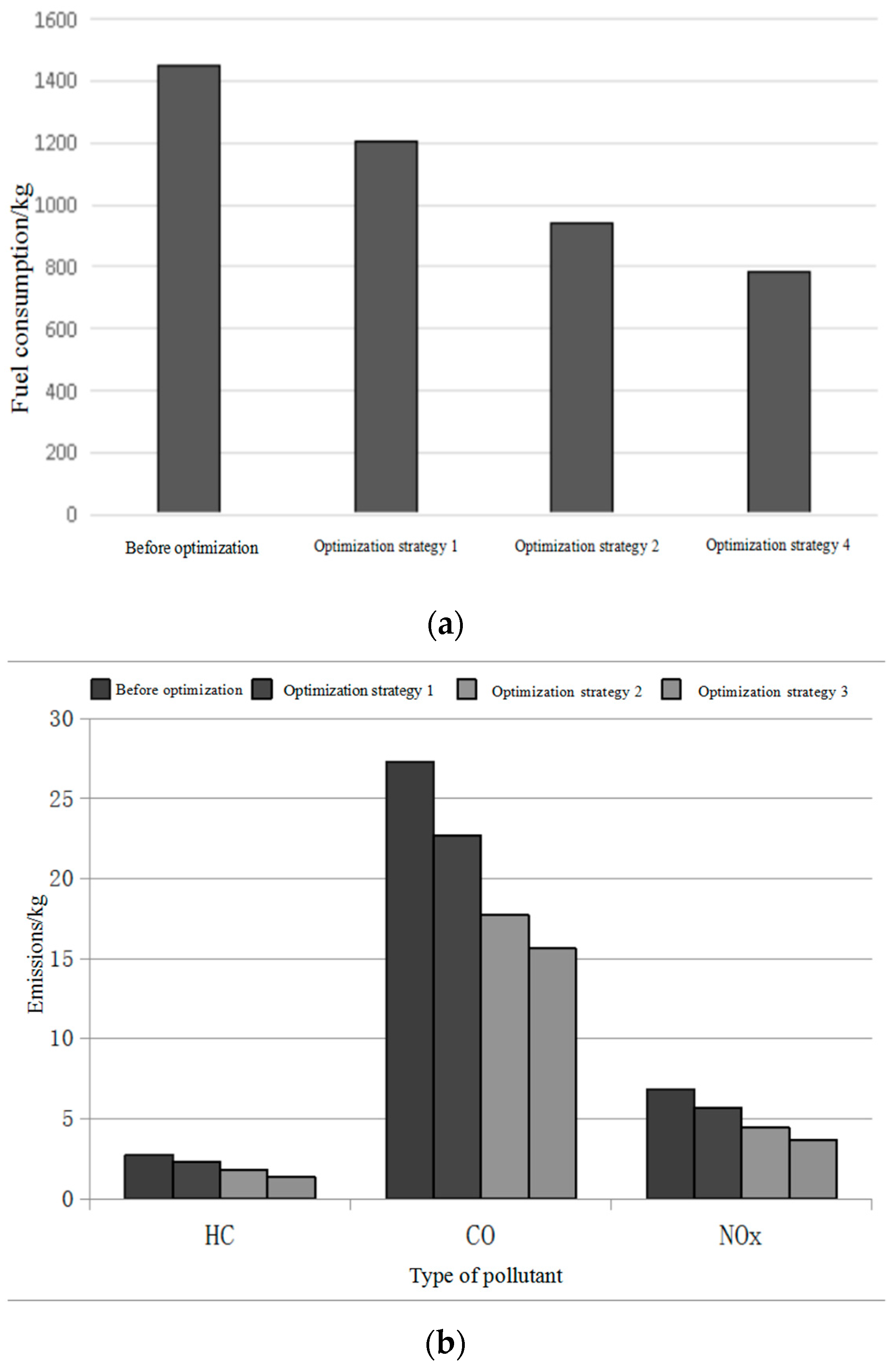
6. Comprehensive Optimization Strategy and Fuel Consumption Calculation
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Track Number | Path Node (Passing Node Time (s)) |
|---|---|
| 617 | 89 (49,842 s)– > 90 (49,880 s)– > 91 (49,888 s)– > 92 (49,907 s)– > 93 (49,925 s)– > 94 (49,933 s)– > 95 (49,941 s)– > 96 (49,956 s)– > 97 (49,973 s)– > 98 (49,997 s)– > 99 (50,017 s)– > 100 (50,048 s)– > 10 (50,061 s)– > 56 (50,099 s) – > 55 (50,117 s) |
| 834 | 4 (49,916 s)– > 8 (49,931 s)– > 19 (49,940 s)– > 33 (49,964 s)– > 42 (49,982 s)– > 41 (50,084 s)– > 40 (50,114 s)– > 39 (50,160 s)– > 38 (50,173 s)–>55 (50,222 s) |
| 2587 | 34 (50,039 s)– > 43 (50,072 s)– > 49 (50,120 s)– > 76 (50,138 s)– > 85 (50,146 s)– > 86 (50,184 s)– > 87 (50,192 s)– > 88 (50,212 s)– > 89 (50,230 s)– > 90 (50,238 s)– > 91 (50,246 s)– > 92 (50,265 s)– > 93 (50,283 s)– > 94 (50,291 s)– > 95 (50,299 s)– > 96 (50,314 s)– > 97 (50,331 s)– > 98 (50,355 s)– > 99 (50,375 s)– > 100 (50,407 s) |
| 98 | 8 (5,0055 s)– > 19 (50,064 s)– > 33 (50,088 s)– > 42 (50,106 s)– > 41 (50,208 s)– > 40 (50,238 s)– > 39 (50,284 s)– > 38 (50,297 s)– > 55 (50,346 s) |
| 132 | 34 (50,173 s)– > 43 (50,206 s)– > 49 (50,254 s)– > 76 (50,272 s)– > 85 (50,280 s)– > 86 (50,318 s)– > 87 (50,326 s)– > 88 (50,346 s)– > 89 (50,364 s)– > 90 (50,372 s)– > 91 (50,380 s)– > 92 (50,399 s)– > 93 (50,417 s)– > 94 (50,425 s)– > 95 (50,433 s)– > 96 (50,448 s)– > 97 (50,465 s)– > 98 (50,489 s) |
| 80 | 88 (50,276 s)– > 89 (50,294 s)– > 90 (50,302 s)– > 91 (50,310 s)– > 92 (50,329 s)– > 93 (50,348 s)– > 94 (50,356 s)– > 95 (50,364 s)– > 96 (50,379 s)– > 97(50,396 s)– > 98(50,419 s)– > 99(50,439 s)– > 100(50,471 s)– > 101 (50,483 s)– > 56 (50,521 s)– > 55 (50,539 s) |
| 2894 | 34 (50,323 s)– > 43 (50,356 s)– > 49 (50,404 s)– > 76 (50,422 s)– > 77 (50,479 s)– > 84 (50,517 s) |
| 3433 | 93 (50,438 s)– > 94 (50,476 s)– > 95 (50,484 s)– > 96 (50,498 s)– > 97 (50,516 s)– > 98 (50,539 s)– > 99 (50,559 s)– > 100 (50,591 s) – > 101 (50,603 s)– > 56 (50,641 s)– > 55 (50,659 s) |
| 1368 | 34 (50,443 s)– > 43(50,476 s)– > 49(50,524 s)– > 76(50,542 s)– > 75 (50,578 s)– > 74 (50,587 s)– > 71 (50,605 s)– > 70 (50,624 s) – > 69 (50,632 s)– > 68 (50,640 s)– > 67 (50,650 s)– > 66 (50,659 s)– > 65 (50,677 s)– > 64 (50,685 s)– > 94 (50,723 s) |
| 339 | 89 (50,472 s)– > 90 (50,510 s)– > 91 (50,518 s)– > 92 (50,537 s)– > 93 (50,555 s)– > 94 (50,563 s)– > 95 (50,571 s)– > 96 (50,586 s) – > 97 (50,603 s)– > 98 (50,627 s)– > 99 (50,647 s)– > 100 (50,678 s)– > 101 (50,691 s)– > 56 (50,729 s)– > 55 (50,747 s) |
| 1704 | 34 (50,565 s)– > 43 (50,598 s)– > 49 (50,646 s)– > 76 (50,664 s)– > 75 (50,700 s)– > 74 (50,709 s)– > 71 (50,727 s)– > 70 (50,746 s) – > 69 (50,754 s)– > 68 (50,762 s)– > 67 (50,772 s)– > 66 (50,781 s)– > 65 (50,799 s)– > 64 (50,807 s)– > 94 (50,845 s) |
| 1527 | 34 (50,704 s)– > 43 (50,737 s)– > 49 (50,785 s)– > 76 (50,803 s)– > 85 (50,811 s)– > 86 (50,849 s) |
| 3676 | 87 (50,757 s)– > 74 (50,765 s)– > 71 (50,813 s)– > 70 (50,832 s)– > 69 (50,840 s)– > 68 (50,848 s)– > 67 (50,858 s)– > 66 (50,867 s) – > 65 (50,886 s)– > 64 (50,894 s)– > 63 (50,902 s)– > 62 (50,916 s)– > 60 (50,933 s)– > 59 (50,957 s)– > 58 (50,977 s)– > 57 (51,008 s)– > 56 (51,021 s)– > 55 (51,069 s) |
| 1727 | 34 (50,825 s)– > 43 (50,858 s)– > 49 (50,906 s)– > 76 (50,924 s)– > 85 (50,932 s)– > 84 (50,987 s) |
| 2712 | 93 (50,898 s)– > 65 (50,906 s)– > 64 (50,944 s)– > 63 (50,952 s)– > 62 (50,966 s)– > 60 (50,983 s)– > 59 (51,007 s)– > 58 (51,027 s) – > 57 (51,059 s)– > 56 (51,071 s)– > 55 (51,119 s) |
| 925 | 34 (50,940 s)– > 43 (50,973 s)– > 49 (51,021 s)– > 76 (51,039 s)– > 85 (51,047 s)– > 86 (51,085 s)– > 87 (51,093 s)– > 88 (51,113 s) – > 89 (51,131 s)– > 90 (51,139 s)– > 91 (51,147 s)– > 92 (51,166 s)– > 93 (51,184 s)– > 94 (51,192 s) |
| 3570 | 89 (50,961 s)– > 70 (50,969 s)– > 69(51,007 s)– > 68(51,015 s)– > 67 (51,025 s)– > 66 (51,033 s)– > 65 (51,052 s)– > 64 (51,060 s) – > 63(51,068 s)– > 62(51,083 s)– > 60 (51,099 s)– > 59 (51,123 s)– > 58 (51,144 s)– > 57 (51,175 s)– > 56 (51,188 s)– > 55(51236 s) |
| 1639 | 4 (51,065 s)– > 8 (51,080 s)– > 19 (51,089 s)– > 33 (51,113 s)– > 42 (51,131 s)– > 41 (51,233 s)– > 40 (51,263 s)– > 39 (51,309 s) – > 38 (51,322 s)– > 55 (51,371 s) |
| 438 | 34 (51,075 s)– > 43 (51,108 s)– > 49 (51,156 s)– > 76 (51,174 s)– > 77 (51,231 s)– > 84 (51,269 s) |
| 1510 | 34 (51,214 s)– > 43 (51,247 s)– > 49 (51,295 s)– > 76 (51,313 s)– > 85 (51,321 s)– > 86 (51,359 s) |
References
- Landry, S.J.; Chen, X.W.; Nof, S.Y. A decision support methodology for dynamic taxiway and runway conflict prevention. Decis. Support Syst. 2013, 55, 165–174. [Google Scholar] [CrossRef]
- Ravizza, S.; Atkin, J.; Burke, E.K. A more realistic approach for airport ground movement optimisation with stand holding. J. Sched. 2014, 17, 507–520. [Google Scholar] [CrossRef]
- Weiszer, M.; Chen, J.; Stewart, P. Preference-Based Evolutionary Algorithm for Airport Runway Scheduling and Ground Movement Optimisation. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015. [Google Scholar]
- Ortega Alba, S.; Manana, M. Energy Research in Airports: A Review. Energies 2016, 9, 349. [Google Scholar] [CrossRef]
- Li, N.; Lv, H. Method to Find out Path of Aircraft on Surface Based on Surface Movement Radar Data. Aeronaut. Comput. Tech. 2016, 46, 6–9. [Google Scholar]
- Lv, H. The Analysis of Aircraft Taxiing and Prediction Study Based on Surveillance Data. Master’s Thesis, Civil Aviation University of China, Tianjing, China, 2016. [Google Scholar]
- Przemysław, P.; Skorupski, J. Aircraft Taxi Route Choice in Case of Conflict Points Existence. In Proceedings of the 16th International Conference on Transport Systems Telematics, Warsaw, Poland, 16–19 March 2016. [Google Scholar]
- Li, N.; Zhang, H. Calculating aircraft pollutant emissions during taxiing at the airport. Acta Sci. Circumst. 2017, 37, 1872–1876. [Google Scholar]
- Chen, J.; Weiszer, M.; Zareian, E. Multi-Objective Fuzzy Rule-Based Prediction and Uncertainty Quantification of Aircraft Taxi Time. In Proceedings of the 20th International Conference on Intelligent Transportation Systems, Yokohama, Japan, 16–19 October 2017. [Google Scholar]
- Zhu, X.; Li, N.; Sun, Y.; Zhang, H.; Wang, K.; Tsai, S.-B. A Study on the Strategy for Departure Aircraft Pushback Control from the Perspective of Reducing Carbon Emissions. Energies 2018, 11, 2473. [Google Scholar] [CrossRef]
- Ding, J.; Li, X.; Li, Q. Optimal Scheduling Model for Hub Airport Taxi Based on Improved Ant Colony Collaborative Algorithm. J. Comput. Appl. 2010, 30, 1000–1003. [Google Scholar] [CrossRef]
- Chiba, R.; Arai, T.; Ota, J. Integrated Design for Automated Guided Vehicle Systems Using Cooperative Co-evolution. Adv. Robot. 2010, 24, 25–45. [Google Scholar] [CrossRef]
- Ren, C. Driverless Vehicle Path Planning Based on Genetic Algorithm Technology Research. Master’s Thesis, Tianjin University, Tianjing, China, 2015. [Google Scholar]
- Tang, J.; Shi, W.; Meng, L. Time-Dependent Dynamic Vehicle Routing Based on Genetic Algorithm. Geomat. Inf. Sci. Wuhan Univ. 2008, 8, 875–879. [Google Scholar]
- Tsai, S.-B. Using the DEMATEL Model to Explore the Job Satisfaction of Research and Development Professionals in China’s Photovoltaic Cell Industry. Renew. Sustain. Energy Rev. 2018, 81, 62–68. [Google Scholar] [CrossRef]
- Lee, Y.C.; Hsiao, Y.C.; Peng, C.F.; Tsai, S.B.; Wu, C.H.; Chen, Q. Using Mahalanobis-Taguchi System, Logistic Regression and Neural Network Method to Evaluate Purchasing Audit Quality. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2015, 229, 3–12. [Google Scholar] [CrossRef]
- Lee, Y.C.; Chen, C.Y.; Tsai, S.B.; Wang, C.T. Discussing green environmental performance and competitive strategies. Pensee 2014, 76, 190–198. [Google Scholar]
- Liu, B.; Li, T.; Tsai, S.B. Low carbon strategy analysis of competing supply chains with different power structures. Sustainability 2017, 9, 835. [Google Scholar] [CrossRef]
- Qu, Q.; Tsai, S.B.; Tang, M.; Xu, C.; Dong, W. Marine ecological environment management based on ecological compensation mechanisms. Sustainability 2016, 8, 1267. [Google Scholar] [CrossRef]
- Lee, Y.C.; Wang, Y.C.; Chien, C.H.; Wu, C.H.; Lu, S.C.; Tsai, S.B.; Dong, W. Applying revised gap analysis model in measuring hotel service quality. SpringerPlus 2016, 5, 1191. [Google Scholar] [CrossRef]
- Wang, J.; Yang, J.M.; Chen, Q.; Tsai, S.B. Collaborative Production Structure of Knowledge Sharing Behavior in Internet Communities. Mob. Inf. Syst. 2016, 2016, 8269474. [Google Scholar] [CrossRef]
- Tsai, S.B.; Lee, Y.C.; Guo, J.J. Using modified grey forecasting models to forecast the growth trends of green materials. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2014, 228, 931–940. [Google Scholar] [CrossRef]
- Tsai, S.B.; Zhou, J.; Gao, Y.; Wang, J.; Li, G.; Zheng, Y.; Ren, P.; Xu, W. Combining FMEA with DEMATEL Models to Solve Production Process Problems. PLoS ONE 2017, 12, 0167710. [Google Scholar] [CrossRef]
- Ge, B.; Jiang, D.; Gao, Y.; Tsai, S.B. The influence of legitimacy on a proactive green orientation and green performance: A study based on transitional economy scenarios in China. Sustainability 2016, 8, 1344. [Google Scholar] [CrossRef]
- Wang, J.; Yang, J.; Chen, Q.; Tsai, S.B. Creating the sustainable conditions for knowledge information sharing in virtual community. SpringerPlus 2016, 5, 1019. [Google Scholar] [CrossRef]
- Tang, Z.; Zhu, X.; Xia, Z. Taxi Routing Update Algorithm for A-SMGCS with Taxi Time Delay. Sci. Technol. Eng. 2017, 17, 326–332. [Google Scholar]











| The Front Plane | The Rear Plane | ||
|---|---|---|---|
| Light | Medium | Heavy | |
| Light | 200 | 200 | 200 |
| Medium | 200 | 200 | 200 |
| Heavy | 300 | 300 | 300 |
| The Front Plane | The Rear Plane | ||
|---|---|---|---|
| Light | Medium | Heavy | |
| Light | 20 | 20 | 20 |
| Medium | 20 | 20 | 20 |
| Heavy | 30 | 30 | 30 |
| Flight | Flight Tracking Number | Arrival and Departure Type | Apron Location | Taxiing Start and End Time (s) |
|---|---|---|---|---|
| 1 | 617 | departure | No. 2 apron | 49,837~50,135 |
| 2 | 834 | departure | F apron | 49,916~50,333 |
| 3 | 2587 | arrival | No. 4 apron | 50039~50,455 |
| 4 | 98 | departure | G apron | 50,055~50,533 |
| 5 | 132 | arrival | No. 4 apron | 50,173~50,621 |
| 6 | 80 | departure | No. 2 apron | 50,276~50,665 |
| 7 | 2894 | arrival | No. 6 apron | 50,323~50,543 |
| 8 | 3433 | departure | No. 2 North Apron | 50,433~50,743 |
| 9 | 1368 | arrival | No. 2 North Apron | 50,443~50,740 |
| 10 | 339 | departure | No. 2 apron | 50,467~50,852 |
| 11 | 1704 | arrival | No. 2 North Apron | 50,565~51,010 |
| 12 | 1527 | arrival | No. 2 South Apron | 50,704~50,855 |
| 13 | 3676 | departure | No. 2 South Apron | 50,752~51,128 |
| 14 | 1727 | arrival | No. 6 apron | 50,825~51,030 |
| 15 | 2712 | departure | No. 2 North Apron | 50,893~51,078 |
| 16 | 925 | arrival | No. 2 North Apron | 50,940~51,216 |
| 17 | 3570 | departure | No. 2 apron | 50,956~51,348 |
| 18 | 1639 | departure | F apron | 51,065~51,465 |
| 19 | 438 | arrival | No. 6 apron | 51,075~51,280 |
| 20 | 1510 | arrival | No. 2 South Apron | 51,214~51,344 |
| Before Optimization | After Optimization | |
|---|---|---|
| Total taxiing distance (m) | 39,650 | 38,728 |
| Total number of turns | 52 | 49 |
| Total taxi time (s) | 6423 | 5343 |
| Number of flights using the C main taxiway | 1 | 7 |
| Number of flights using the D main taxiway | 16 | 10 |
| The number of slow down or stop to avoidance conflict | 6 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Sun, Y.; Yu, J.; Li, J.-C.; Zhang, H.-f.; Tsai, S. An Empirical Study on Low Emission Taxiing Path Optimization of Aircrafts on Airport Surfaces from the Perspective of Reducing Carbon Emissions. Energies 2019, 12, 1649. https://doi.org/10.3390/en12091649
Li N, Sun Y, Yu J, Li J-C, Zhang H-f, Tsai S. An Empirical Study on Low Emission Taxiing Path Optimization of Aircrafts on Airport Surfaces from the Perspective of Reducing Carbon Emissions. Energies. 2019; 12(9):1649. https://doi.org/10.3390/en12091649
Chicago/Turabian StyleLi, Nan, Yu Sun, Jian Yu, Jian-Cheng Li, Hong-fei Zhang, and Sangbing Tsai. 2019. "An Empirical Study on Low Emission Taxiing Path Optimization of Aircrafts on Airport Surfaces from the Perspective of Reducing Carbon Emissions" Energies 12, no. 9: 1649. https://doi.org/10.3390/en12091649
APA StyleLi, N., Sun, Y., Yu, J., Li, J.-C., Zhang, H.-f., & Tsai, S. (2019). An Empirical Study on Low Emission Taxiing Path Optimization of Aircrafts on Airport Surfaces from the Perspective of Reducing Carbon Emissions. Energies, 12(9), 1649. https://doi.org/10.3390/en12091649