The Impact of the Imbalance Netting Process on Power System Dynamics †




Abstract
1. Introduction
1.1. Motivation and Incitement
1.2. Literature Review
1.3. Contribution and Paper Structure
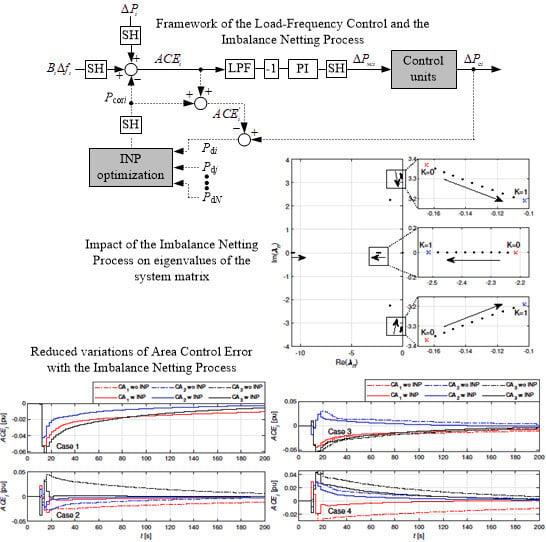
2. Load-Frequency Control and the Imbalance Netting Process
2.1. LFC
2.2. INP
2.3. INP Optimization
3. Eigenvalue Analysis of a Two CA System with INP
3.1. State-Space Model
- State 1:
- , ;
- State 2:
- , .
3.2. Numerical Evaluation of the Impact of the ATC Factor on the Eigenvalues of
4. Numerical Simulations and Performance Indicators
4.1. Dynamic Model
4.1.1. Structure
4.1.2. Parameters
4.2. Testing Cases
4.2.1. Step Changes of Loads
4.2.2. Random Load Fluctuations
4.3. Indicators for Evaluation of LFC Provision
4.3.1. Performance Indicators
4.3.2. Balancing Energy
4.3.3. Regulating Reserve
4.3.4. Unintended Exchange of Energy
5. Results
5.1. Time Responses to Step Changes of Loads
5.2. Evaluation of LFC Provision to Random Load Fluctuations
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| TSO | Transmission System Operator |
| INP | Imbalance Netting Process |
| CA | Control Area |
| LFC | Load-Frequency Control |
| AGC | Automatic Generation Control |
| ATC | Available Transmission Capacity |
| GCC | Grid Control Cooperation |
| IGCC | International Grid Control Cooperation |
| ACE | Area Control Error |
| ADI | Area Control Error Diversity Interchange |
| PI | Proportional-Integral Controller |
| LPF | Low Pass Filter |
| SH | Sample and Hold |
| CPS | Control Performance Standards |
| ENTSO-E | European Network of Transmission System Operators for Electricity |
| NERC | North American Electric Reliability Corporation |
References
- Zhou, Q.; Bialek, J.W. Approximate model of European interconnected system as a benchmark system to study effects of cross-border trades. IEEE Trans. Power Syst. 2005, 20, 782–788. [Google Scholar] [CrossRef]
- Ahmadi-Khatir, A.; Conejo, A.J.; Cherkaoui, R. Multi-Area Energy and Reserve Dispatch Under Wind Uncertainty and Equipment Failures. IEEE Trans. Power Syst. 2013, 28, 4373–4383. [Google Scholar] [CrossRef]
- Bialek, J.W.; Ziemianek, S.; Wallace, R. A methodology for allocating transmission losses due to cross-border trades. IEEE Trans. Power Syst. 2004, 19, 1255–1262. [Google Scholar] [CrossRef]
- Strasser, T.; Andrén, F.; Kathan, J.; Cecati, C.; Buccella, C.; Siano, P.; Leitão, P.; Zhabelova, G.; Vyatkin, V.; Vrba, P.; et al. A Review of Architectures and Concepts for Intelligence in Future Electric Energy Systems. IEEE Trans. Ind. Electron. 2015, 62, 2424–2438. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Zolotarev, P.; Gökeler, M.; Kuring, M.; Neumann, H.; Kurscheid, E.-M. Grid Control Cooperation—A framework for technical and economical crossborder optimization for load-frequency control. In Proceedings of the 44th International Conference on Large High Voltage Electric Systems (Cigre’12), Paris, France, 26–30 August 2012. [Google Scholar]
- Scherer, M.; Andersson, G. A blueprint for the European imbalance netting process using multi-objective optimization. In Proceedings of the IEEE International Energy Conference (ENERGYCON’16), Leuven, Belgium, 4–8 April 2016. [Google Scholar]
- ENTSO-E. Operational Reserve Ad Hoc Team Report; ENTSO-E: Brussels, Belgium, May 2012. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- EUR-Lex. Establishing a Guideline on Electricity Transmission System Operation. Commission Regulation (EU) 2017/1485. Available online: https://eur-lex.europa.eu/eli/reg/2017/1485/oj (accessed on 21 October 2019).
- NERC. Frequency Response Standard, Background Document; NERC: Atlanta, GA, USA, November 2012. [Google Scholar]
- Jaleeli, N.; VanSlyck, L.S. NERC’s new control performance standards. IEEE Trans. Power Syst. 1999, 14, 1092–1099. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control; Springer: New York, NY, USA, 2009. [Google Scholar]
- Ilic, M.D.; Yoon, Y.T.; Zobian, A. Available transmission capacity (ATC) and its value under open access. IEEE Trans. Power Syst. 1997, 12, 636–645. [Google Scholar] [CrossRef]
- Stakeholder Document for the Principles of IGCC; ENTSO-E: Brussels, Belgium, September 2016.
- EUR-Lex. Establishing a Guideline on Electricity Balancing. Commission Regulation (EU) 2017/2195. Available online: https://eur-lex.europa.eu/eli/reg/2017/2195/oj (accessed on 21 October 2019).
- Cronenberg, A.; Sager, N.; Willemsen, S. Integration of France into the international grid control cooperation. In Proceedings of the IEEE International Energy Conference (ENERGYCON’16), Leuven, Belgium, 4–8 April 2016. [Google Scholar]
- Sprey, J.D.; Schultheis, P.; Moser, A. Dynamic dimensioning of balancing reserve. In Proceedings of the 14th International Conference on the European Energy Market (EEM), Dresden, Germany, 6–9 June 2017. [Google Scholar]
- Supporting Document for the Network Code on Load-Frequency Control and Reserves; ENTSO-E: Brussels, Belgium, June 2013.
- Oneal, A.R. A simple method for improving control area performance: Area control error (ACE) diversity interchange ADI. IEEE Trans. Power Syst. 1995, 10, 1071–1076. [Google Scholar] [CrossRef]
- Zhou, N.; Etingov, P.V.; Makarov, J.V.; Guttromson, R.T.; McManus, B. Improving area control error diversity interchange (ADI) program by incorporating congestion constraints. In Proceedings of the IEEE PES T&D 2010, New Orleans, LA, USA, 19–22 April 2010. [Google Scholar]
- Apostolopoulou, D.; Sauer, P.W.; Dominguez-Garcia, A.D. Balancing authority area coordination with limited exchange of information. In Proceedings of the 2015 IEEE Power and Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Elgerd, O.I.; Fosha, C.E. Optimum megawatt-frequency control of multiarea electric energy systems. IEEE Trans. Power App. Syst. 1970, PAS-89, 556–563. [Google Scholar] [CrossRef]
- Janecek, E.; Cerny, V.; Fialova, A.; Fantík, J. A new approach to modelling of electricity transmission system operation. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006. [Google Scholar]
- ENTSO-E. Network Code on Load-Frequency Control and Reserves; ENTSO-E: Brussels, Belgium, June 2013. [Google Scholar]
- ENTSO-E. Frequency Quality, Phase 2; June 2017. [Google Scholar]
- NERC. Balancing and Frequency Control; NERC: Atlanta, GA, USA, January 2011. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State 1 | ||||||||||
| 0.6 | 30K + 233 | −19K + 20,000 | −1300K + 21,000 | −599K + 12,000 | −233K + 4800 | −17K + 1200 | 255 | 27 | 1 | |
| State 2 | ||||||||||
| 0.6 | −30K + 233 | −59K + 20,000 | −1300K + 21,000 | −599K + 12,000 | −233K + 4800 | −17K + 1200 | 255 | 27 | 1 |
| State 1 | K | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0. 6 | 0.7 | 0.8 | 0.9 | 1 |
| 0.0571 | 0.0558 | 0.0544 | 0.0529 | 0.0514 | 0.0498 | 0.0481 | 0.0463 | 0.0445 | 0.0425 | 0.0405 | ||
| State 2 | K | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0. 6 | 0.7 | 0.8 | 0.9 | 1 |
| 0.0571 | 0.0558 | 0.0544 | 0.0530 | 0.0514 | 0.0498 | 0.0481 | 0.0464 | 0.0445 | 0.0426 | 0.0406 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 0.1 pu s | 1/3 | 0.3 s | |||
| 0.01 pu/Hz | 0.3 | 60 s | |||
| 1/15 pu/Hz | 3 Hz/pu | 30 s | |||
| Hydraulic | Value | Non-Rehat | Value | Reheat | Value |
| 0.2 s | 0.1 s | 0.2 s | |||
| 5 s | 0.3 s | 7 s | |||
| 1 s | – | – | 0.3 s | ||
| 7.6 | – | – | 0.3 | ||
| ramp rate | ±100 | ramp rate | ±20 | ramp rate | ±10 |
| Possible INP | ||||
|---|---|---|---|---|
| CA | CA | CA | Compensation | |
| Case 1 | + | + | + | NO |
| Case 2 | + | + | − | YES |
| Case 3 | + | − | + | YES |
| Case 4 | + | − | − | YES |
| Case 5 | − | + | + | YES |
| Case 6 | − | − | + | YES |
| Case 7 | − | + | − | YES |
| Case 8 | − | − | − | NO |
| Parameter | wo | w | wo | w | Parameter | wo | w | wo | w | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Case 1 | CA | 3.95 | 3.95 | 5.51 | 5.51 | Case 3 | CA | 2.64 | 2.45 | 5.54 | 4.14 |
| CA | 3.84 | 3.84 | 2.13 | 2.13 | CA | 2.29 | 2.12 | 2.18 | 0.55 | ||
| CA | 3.91 | 3.91 | 4.29 | 4.29 | CA | 2.60 | 2.42 | 4.30 | 3.25 | ||
| Case 2 | CA | 1.01 | 0.43 | 5.53 | 1.18 | Case 4 | CA | 0.64 | 1.04 | 5.56 | 0.38 |
| CA | 1.24 | 0.61 | 2.16 | 0.45 | CA | 0.65 | 1.07 | 2.15 | 1.10 | ||
| CA | 1.20 | 0.51 | 4.31 | 0.12 | CA | 0.52 | 0.93 | 4.30 | 2.24 | ||
| CA | CA | CA | |||||
|---|---|---|---|---|---|---|---|
| Parameter | wo | w | wo | w | wo | w | |
| Case 1 | 20.22 | 20.22 | 13.49 | 13.49 | 27.01 | 27.01 | |
| −13.75 | −13.75 | −9.66 | −9.66 | −19.36 | −19.36 | ||
| 14.03 | 14.03 | 9.75 | 9.75 | 19.55 | 19.55 | ||
| 10.88 | 10.88 | 7.49 | 7.49 | 14.98 | 14.98 | ||
| 4.43 | 4.43 | 3.10 | 3.10 | 6.02 | 6.02 | ||
| −2.35 | −2.35 | −1.70 | −1.70 | −3.23 | −3.23 | ||
| Case 2 | 20.24 | 4.15 | 13.52 | 2.84 | 19.39 | 0.31 | |
| −13.77 | −2.86 | −9.69 | −1.98 | −27.04 | −0.33 | ||
| 14.08 | 2.86 | 9.79 | 1.97 | 15.03 | 0.24 | ||
| 10.89 | 2.25 | 7.51 | 1.56 | 19.63 | 0.21 | ||
| 4.39 | 0.91 | 3.01 | 0.63 | 3.14 | 0.03 | ||
| −2.33 | −0.49 | −1.62 | −0.35 | −5.90 | −0.04 | ||
| Case 3 | 20.23 | 14.83 | 9.49 | 1.42 | 27.03 | 20.09 | |
| −13.76 | −10.19 | −13.80 | −1.69 | −19.37 | −13.95 | ||
| 14.06 | 10.16 | 7.61 | 1.14 | 19.57 | 14.03 | ||
| 10.90 | 7.98 | 9.76 | 1.03 | 15.00 | 11.06 | ||
| 4.41 | 3.24 | 1.58 | 0.16 | 6.00 | 4.39 | ||
| −2.34 | −1.74 | −2.95 | −1.19 | −3.22 | −2.39 | ||
| Case 4 | 20.25 | 0.67 | 9.69 | 4.91 | 19.38 | 9.67 | |
| −13.78 | −0.60 | −13.52 | −7.07 | −27.03 | −13.96 | ||
| 14.10 | 0.42 | 7.51 | 3.87 | 15.01 | 7.68 | ||
| 10.91 | 0.43 | 9.79 | 4.89 | 19.61 | 9.75 | ||
| 4.40 | 0.11 | 1.57 | 0.84 | 3.15 | 1.64 | ||
| −2.34 | −0.10 | −2.95 | −1.55 | −5.92 | −3.03 | ||
| Parameter | wo | w | wo | w | Parameter | wo | w | wo | w | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Case 1 | CA | 0.246 | 0.246 | −0.258 | −0.258 | Case 3 | CA | 4.444 | 0.021 | −2.368 | −0.017 |
| CA | 0.273 | 0.273 | −0.263 | −0.263 | CA | 0.774 | −0.002 | −1.460 | 0.002 | ||
| CA | 0.086 | 0.086 | −0.075 | −0.075 | CA | 1.597 | 0.022 | −2.986 | −0.026 | ||
| Case 2 | CA | 1.935 | 0.019 | −3.604 | −0.023 | Case 4 | CA | 2.368 | 0.017 | −4.444 | −0.021 |
| CA | 1.269 | −0.008 | −2.378 | 0.009 | CA | 1.460 | −0.002 | −0.774 | 0.002 | ||
| CA | 5.982 | 0.013 | −3.204 | −0.011 | CA | 2.986 | 0.026 | −1.597 | −0.022 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Topler, M.; Ritonja, J.; Polajžer, B. The Impact of the Imbalance Netting Process on Power System Dynamics. Energies 2019, 12, 4733. https://doi.org/10.3390/en12244733
Topler M, Ritonja J, Polajžer B. The Impact of the Imbalance Netting Process on Power System Dynamics. Energies. 2019; 12(24):4733. https://doi.org/10.3390/en12244733
Chicago/Turabian StyleTopler, Marcel, Jožef Ritonja, and Boštjan Polajžer. 2019. "The Impact of the Imbalance Netting Process on Power System Dynamics" Energies 12, no. 24: 4733. https://doi.org/10.3390/en12244733
APA StyleTopler, M., Ritonja, J., & Polajžer, B. (2019). The Impact of the Imbalance Netting Process on Power System Dynamics. Energies, 12(24), 4733. https://doi.org/10.3390/en12244733