Power Curve-Fitting Control Method with Temperature Compensation and Fast-Response for All-Metal Domestic Induction Heating Systems




Abstract
1. Introduction
2. Design Consideration for Proposed All-Metal IH System
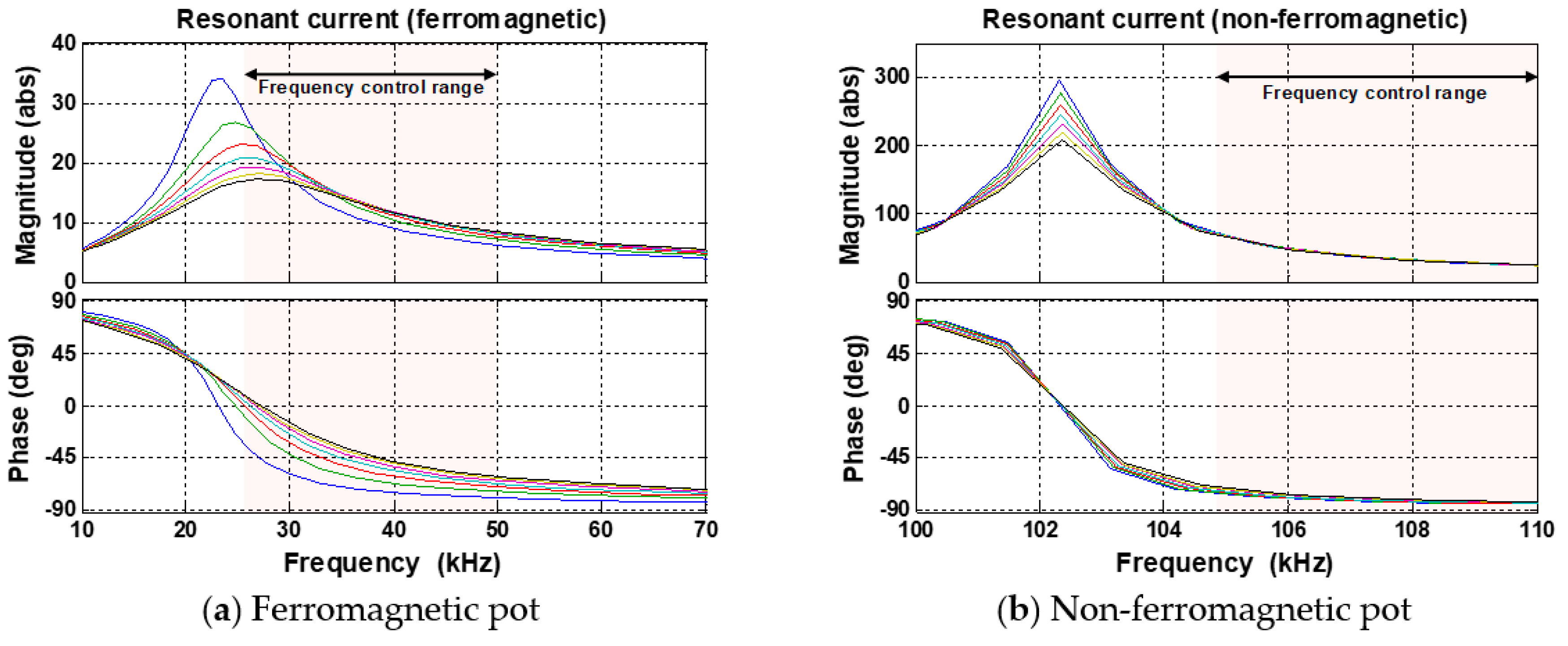
2.1. Considerations for Induction Heating of Non-Ferromagnetic Pot
2.2. Prototype Design for All-Metal IH System
3. Control Strategy of the Proposed All-Metal IH System
3.1. Load Analysis and Operating Modes of the Proposed System
- (1)
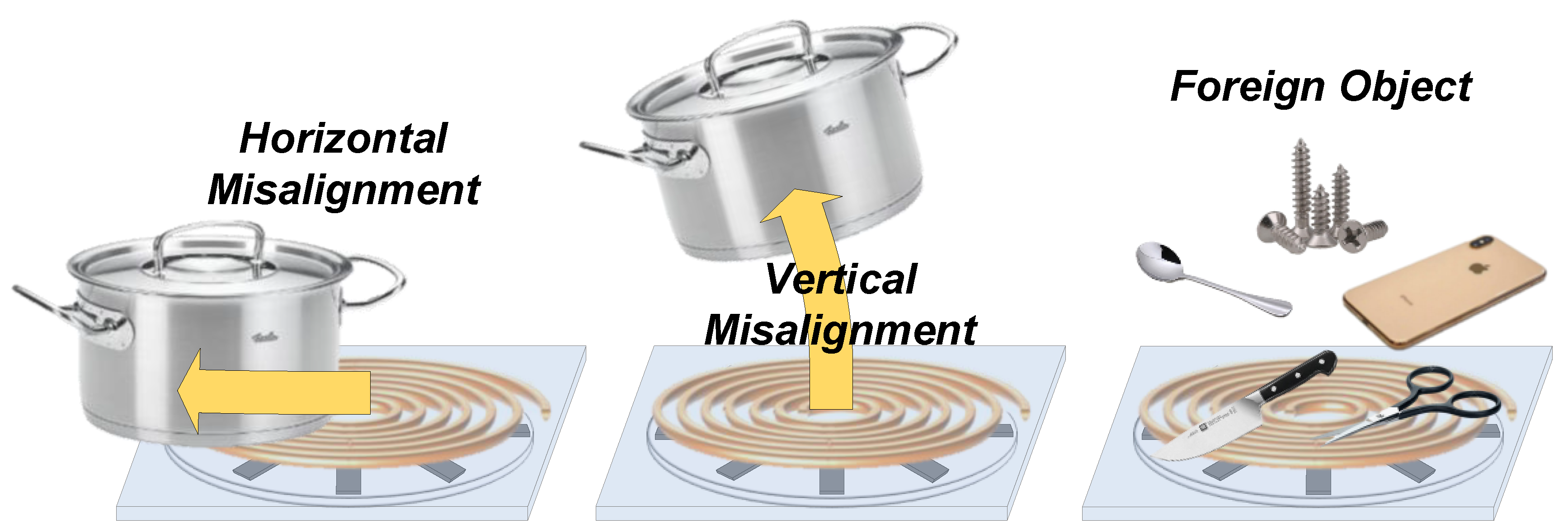
- Mode I: In this mode, the HB-SRC soft-starts at a high switching frequency to identify the material and sizes of the pots. In the initial operation, the relay is always in the off-state, as shown in Figure 6a, and the power is safely controlled by detecting foreign objects and no-load conditions. Once the material and size of the pot are identified, the HB-SRC will proceed to the next appropriate heating mode.
- (2)
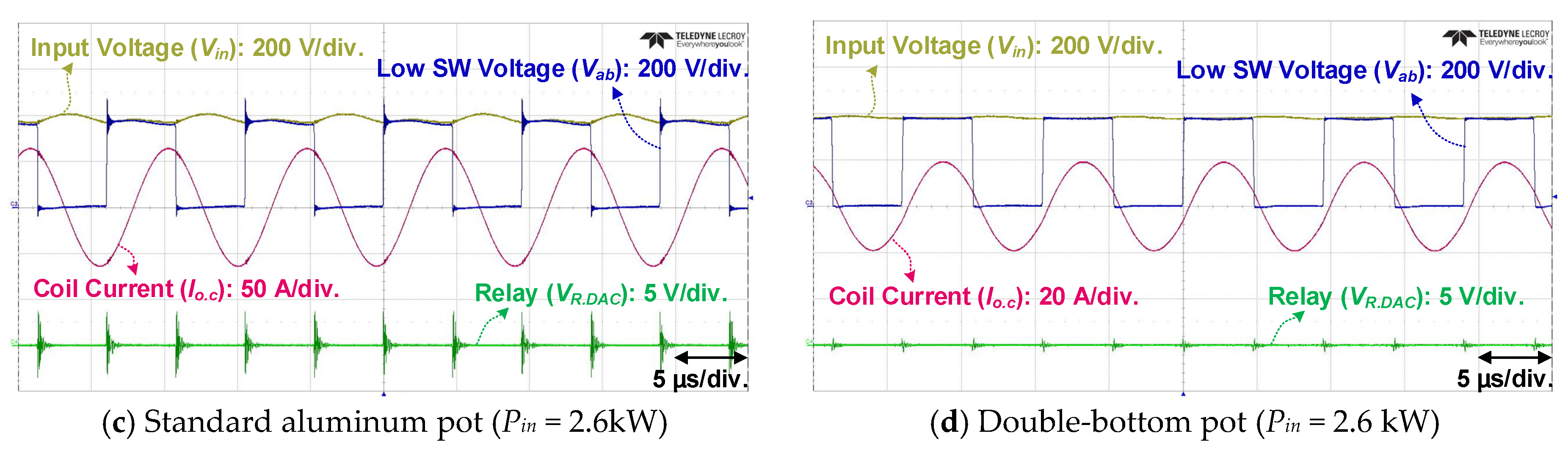
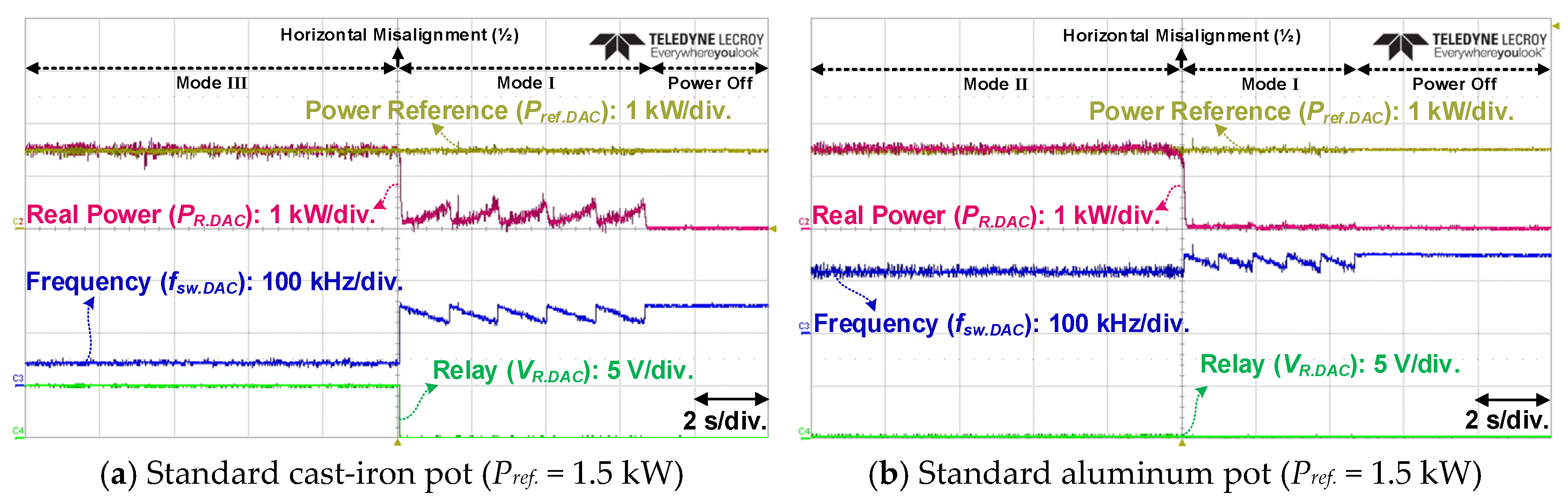
- Mode II: This mode is the operating mode for heating the non-ferromagnetic pots. The relay maintains the off-state and operates in the high frequency range above 100 kHz, as shown in Figure 5. Mode II limits the maximum power to 2.6 kW because the non-ferromagnetic pots are applied as loads.
- (3)
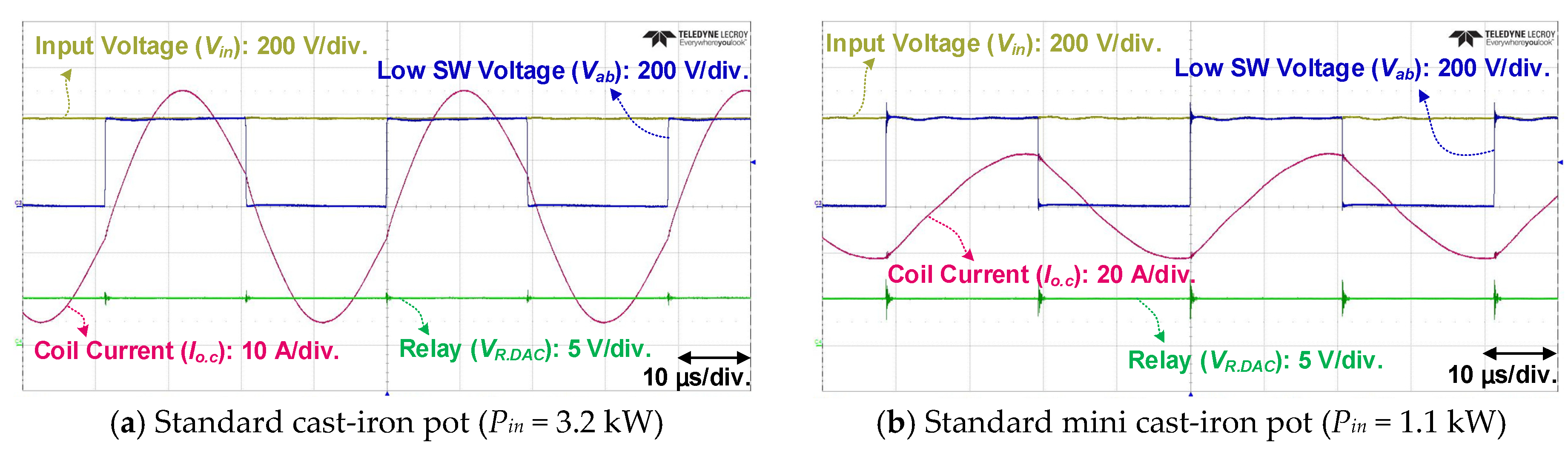
- Mode III: In this operating mode, the ferromagnetic pots are heated. When the ferromagnetic pot is identified from Mode I, the relay changes to the on-state and enters Mode III, as shown in Figure 6b. The operating switching frequency is less than 50 kHz and the maximum power is 3.2 kW.
3.2. Proposed Power Curve-Fitting Control Method
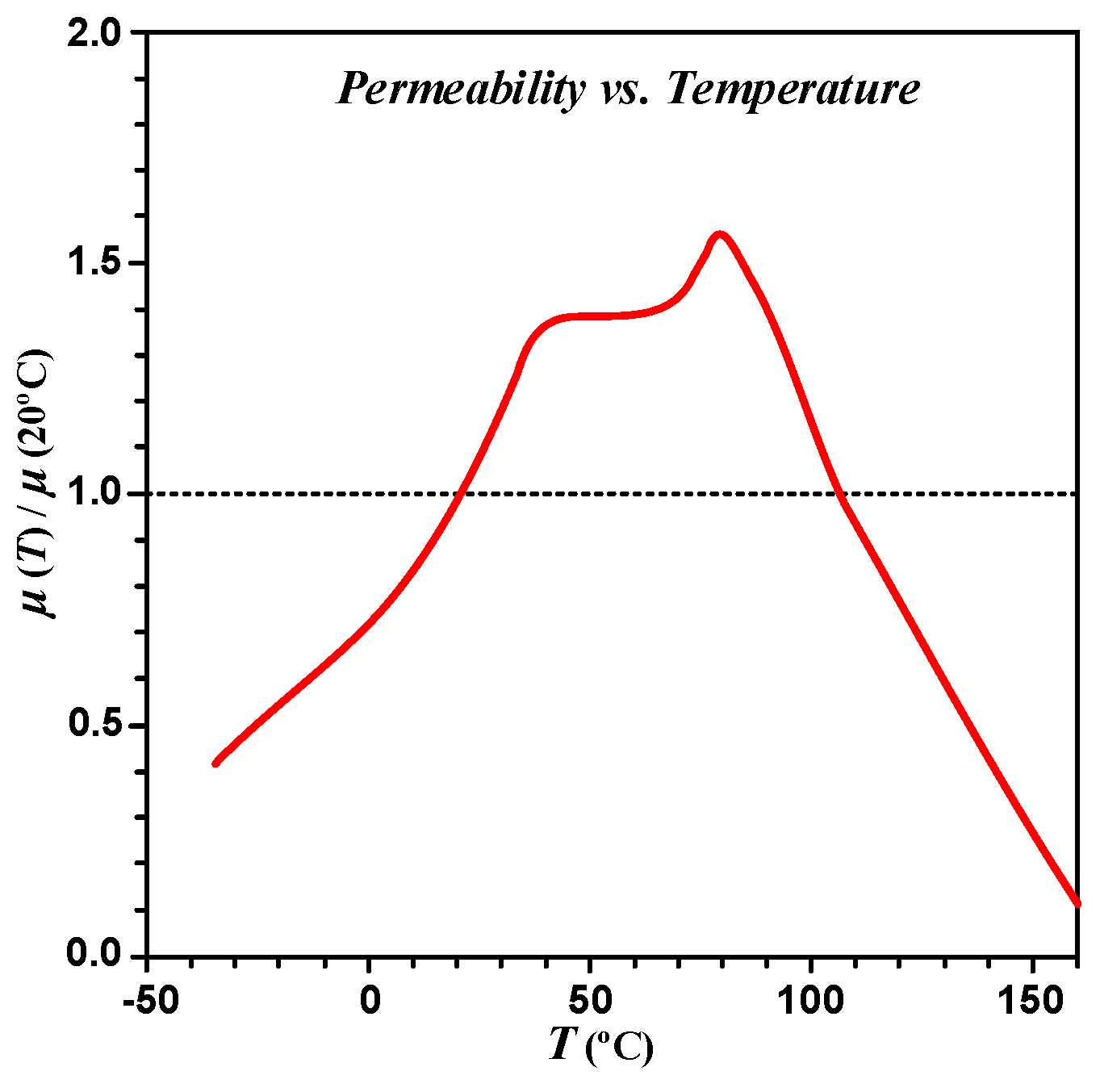
3.3. Working-Coil Temperature Compensation Algorithm
4. Experimental Results
4.1. Pot IH and Boiling-Speed Experiment
4.2. Misalignment Experiment between Pot and Working-Coil
4.3. Pot Replacement and Detection Experiment during IH
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Acero, J.; Burdio, J.M.; Barragan, L.A.; Navarro, D.; Alonso, R.; Garcia, J.R.; Monterde, F.; Hernande, P.; Llorente, S.; Garde, I. Domestic induction heating appliances: An overview of recent research. In Proceedings of the 2008 Twenty-Third Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 24–28 February 2008; pp. 39–47. [Google Scholar]
- Koertzen, H.W.; van Wyk, J.D.; Ferreira, J.A. Design of the half bridge series resonant converters for induction cooking. In Proceedings of the Power Electronics Specialist Conference (PESC ‘95), Atlanta, GA, USA, 18–22 June 1995; pp. 729–735. [Google Scholar]
- Dawson, F.P.; Jain, P. A comparison of load commutated inverter Systems for Induction Heating and Melting Applications. IEEE Trans. Power Electron. 1991, 6, 430–441. [Google Scholar] [CrossRef]
- Park, S.M.; Jang, E.; Joo, D.; Lee, B.K. Power curve-fitting control method with temperature compensation for all-metal induction heating systems. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 3388–3393. [Google Scholar]
- Esteve, V.; Jordán, J.; Sanchis-Kilders, E.; Dede, E.J.; Maset, E.; Ejea, J.B.; Ferreres, A. Improving the reliability of series resonant inverters for induction heating applications. IEEE Trans. Ind. Electron. 2014, 61, 2564–2572. [Google Scholar] [CrossRef]
- Shoji, H.; Uruno, J.; Isogao, M. Buck-boost-full-bridge inverter for all metal induction heating cookers. IEEJ J. Ind. Appl. 2016, 5, 339–346. [Google Scholar] [CrossRef][Green Version]
- Ahmed, N.A.; Nakaoka, M. Boost-half-bridge edge resonant soft switching PWM high-frequency inverter for consumer induction heating appliances. IEEE Proc. Electr. Power Appl. 2006, 153, 932–938. [Google Scholar] [CrossRef]
- Tanaka, T. A new induction cooking range for heating any kind of metal vessels. IEEE Trans. Consum. Electron. 1989, 35, 635–641. [Google Scholar] [CrossRef]
- Sadakata, H.; Fujita, A.; Sumiyoshi, S.; Omori, H.; Saha, B.; Ahmed, T.; Nakaoka, M. Latest practical developments of triplex series load resonant frequency operated high frequency inverter for induction-heated low resistivity metallic appliances in consumer built-in cooktops. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 1825–1832. [Google Scholar]
- Ogiwara, H.; Nakaoka, M. ZCS high frequency inverter using SIT for induction heating applications. IEEE Proc. Electr. Power Appl. 2003, 150, 185–192. [Google Scholar] [CrossRef]
- Millan, I.; Burdio, J.M.; Acero, J.; Lucia, O.; Llorente, S. Series resonant inverter with selective harmonic operation applied to all-metal domestic induction heating. IET Power Electron. 2011, 4, 587–592. [Google Scholar] [CrossRef]
- Lucia, O.; Maussion, P.; Dede, E.J.; Burdio, J.M. Induction heating technology and its applications: Past developments, current technology, and future challenges. IEEE Trans. Ind. Electron. 2014, 61, 2509–2520. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Jiang, C.; Liu, W. All-metal domestic induction heating using single-frequency double-layer coils. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar]
- Safety Standards for Household Electrical Products: IEC 60335-2-9; IEC: Geneva, Switzerland, 2019.
- Acero, J.; Burdio, J.M.; Barragan, L.A. Frequency-dependent resistance in litz-wire planar windings for all-metal domestic induction heating appliances. In Proceedings of the Twentieth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Austin, TX, USA, 6–10 March 2005. [Google Scholar]
- Sergeant, P.; Hectors, D.; Dupre, L.; van Reusel, K. Thermal analysis of magnetic shields for induction heating. IET Electr. Power Appl. 2009, 3, 543–550. [Google Scholar] [CrossRef]
- Acero, J.; Alonso, R.; Burdio, J.M.; Barragan, L.A.; Puyal, D. Analytical equivalent impedance for a planar circular induction heating system. IEEE Trans. Magn. 2006, 42, 84–86. [Google Scholar] [CrossRef]
- Simha, D.; Sadhu, P.K.; Pal, N. Computation of Induction and AC Resistance of a Twisted Litz-Wire for High Frequency Induction Cooker. In Proceedings of the 2010 International Conference on Industrial Electronics, Control and Robotics (IECR 2010), Orissa, India, 27–29 December 2010; pp. 85–90. [Google Scholar]
- Lope, I.; Acero, J.; Carretero, C. Analysis and optimization of the efficiency of induction heating applications with litz-Wire planar and solenoidal coils. IEEE Trans. Power Electron. 2016, 31, 5089–5101. [Google Scholar] [CrossRef]
- Bhat, A.K.S. Analysis and design of a modified series resonant converter. IEEE Trans. Power Electron. 1993, 8, 423–430. [Google Scholar] [CrossRef]
- Burnham, J.; Buritz, R.S. Factors affecting corona inception levels of coils insulated with Kapton and Nomex. In Proceedings of the Conference on Electrical Insulation & Dielectric Phenomena, Pocono Manor, PA, USA, 12–14 October 1970; pp. 222–227. [Google Scholar]
- Sarnago, H.; Lucía, O.; Burdio, J.M. A Versatile Resonant Tank Identification Methodology for Induction Heating Systems. IEEE Trans. Power Electron. 2018, 33, 1897–1901. [Google Scholar] [CrossRef]
- Robinson, M.P.; Clegg, J. Improved determination of Q-factor and resonant frequency by a quadratic curve-fitting method. IEEE Trans. Electromagn. Compat. 2005, 47, 399–402. [Google Scholar] [CrossRef]
- Martinez, W.; Noah, M.; Imaoka, J. Reverse-recovery current reduction in a ZCS boost converter with saturable inductors using nanocrystalline core materials. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications, Karlsruhe, Germany, 5–9 September 2016. [Google Scholar]
- Gerber, S.S. Performance of high-frequency high-flux magnetic cores at cryogenic temperatures. In Proceedings of the 2002 37th Intersociety Energy Conversion Engineering Conference, Washington, DC, USA, 29–31 July 2002. [Google Scholar]
- Niedra, J.M. Design Considerations for High Temperature Power Inductors; NASA: Washington, DC, USA, 2005.
- Patidar, B.; Hussain, M.M.; Jha, S.K.; Dikshit, B.; Sharma, A. Modelling and experimental demonstration of a litz coil-based high-temperature induction heating system for melting application. IET Electr. Power Appl. 2018, 12, 161–168. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Ferromagnetic and High Resistivity | Non-Ferromagnetic and Low Resistivity | ||
|---|---|---|---|---|
| Cast-Iron | SUS430 | Aluminum | Copper | |
| Electrical Resistivity (ρ (μΩm)) | 0.17 | 0.72 | 0.027 | 0.017 |
| Relative Permeability (μs) | 1000 | 500 | 1.00002 | 0.999994 |
| Previously Developed IH Cooktop | ○ | ○ | × | × |
| All-Metal IH System Specifications | Resonant Network | |||
|---|---|---|---|---|
| Parameters | Value (Unit) | Parameters | Value (Unit) | |
| Ferromagnetic | Non-Ferromagnetic | |||
| Operating Power | 400–3200 (W) | 400–2600 (W) | Working-Coil Layer | 3 (Layer) |
| Operating Frequency | 25–51 (kHz) | 105–110 (kHz) | Working-Coil Turns | 39 (turn) |
| Maximum Coil Current | 19 (Arms) | 50 (Arms) | Capacitance for Fe | 300 (nF) |
| Maximum Coil Voltage | 490 (Vpeak) | 2500 (Vpeak) | Capacitance for Al | 22 (nF) |
| Picture |  |  |  |  |  |
|---|---|---|---|---|---|
| Pot | Standard cast-iron pot | Standard aluminum pot | Double-bottom pot | Standard mini cast-iron pot | Standard stick or no-load condition |
| Diameter of Cooking Zone | 210 (mm) | 160 (mm) | 180 (mm) | 90 (mm) | 70 (mm) |
| Quantity of Water | 2 (L) | 1.5 (L) | 1.5 (L) | 0.6 (L) | - |
| Parameter | Ferromagnetic Pot | Non-Ferromagnetic Pot |
|---|---|---|
| Working-Coil Max. Temp. (°C) | 50 | 145 |
| Maximum Coil Current (Arms) | 19 | 50 |
| Operating Frequency (kHz) | 28 | 105 |
| Pot-Type | Diameter of Cooking Zone (mm) | Quantity of Water (L) | Input Power (W) | Boiling Speed (s) | IH Efficiency (%) |
|---|---|---|---|---|---|
| Standard Cast-Iron | 210 | 2 | 3200 | 241 | 87.05 |
| Standard Mini Cast-Iron | 90 | 0.6 | 1100 | 172 | 83.51 |
| Standard Aluminum | 160 | 1.5 | 2600 | 266 | 71.28 |
| Double-Bottom | 180 | 1.5 | 2600 | 218 | 86.97 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.M.; Jang, E.; Joo, D.; Lee, B.K. Power Curve-Fitting Control Method with Temperature Compensation and Fast-Response for All-Metal Domestic Induction Heating Systems. Energies 2019, 12, 2915. https://doi.org/10.3390/en12152915
Park SM, Jang E, Joo D, Lee BK. Power Curve-Fitting Control Method with Temperature Compensation and Fast-Response for All-Metal Domestic Induction Heating Systems. Energies. 2019; 12(15):2915. https://doi.org/10.3390/en12152915
Chicago/Turabian StylePark, Sang Min, Eunsu Jang, Dongmyoung Joo, and Byoung Kuk Lee. 2019. "Power Curve-Fitting Control Method with Temperature Compensation and Fast-Response for All-Metal Domestic Induction Heating Systems" Energies 12, no. 15: 2915. https://doi.org/10.3390/en12152915
APA StylePark, S. M., Jang, E., Joo, D., & Lee, B. K. (2019). Power Curve-Fitting Control Method with Temperature Compensation and Fast-Response for All-Metal Domestic Induction Heating Systems. Energies, 12(15), 2915. https://doi.org/10.3390/en12152915