A Duty Cycle Space Vector Modulation Strategy for a Three-to-Five Phase Direct Matrix Converter


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
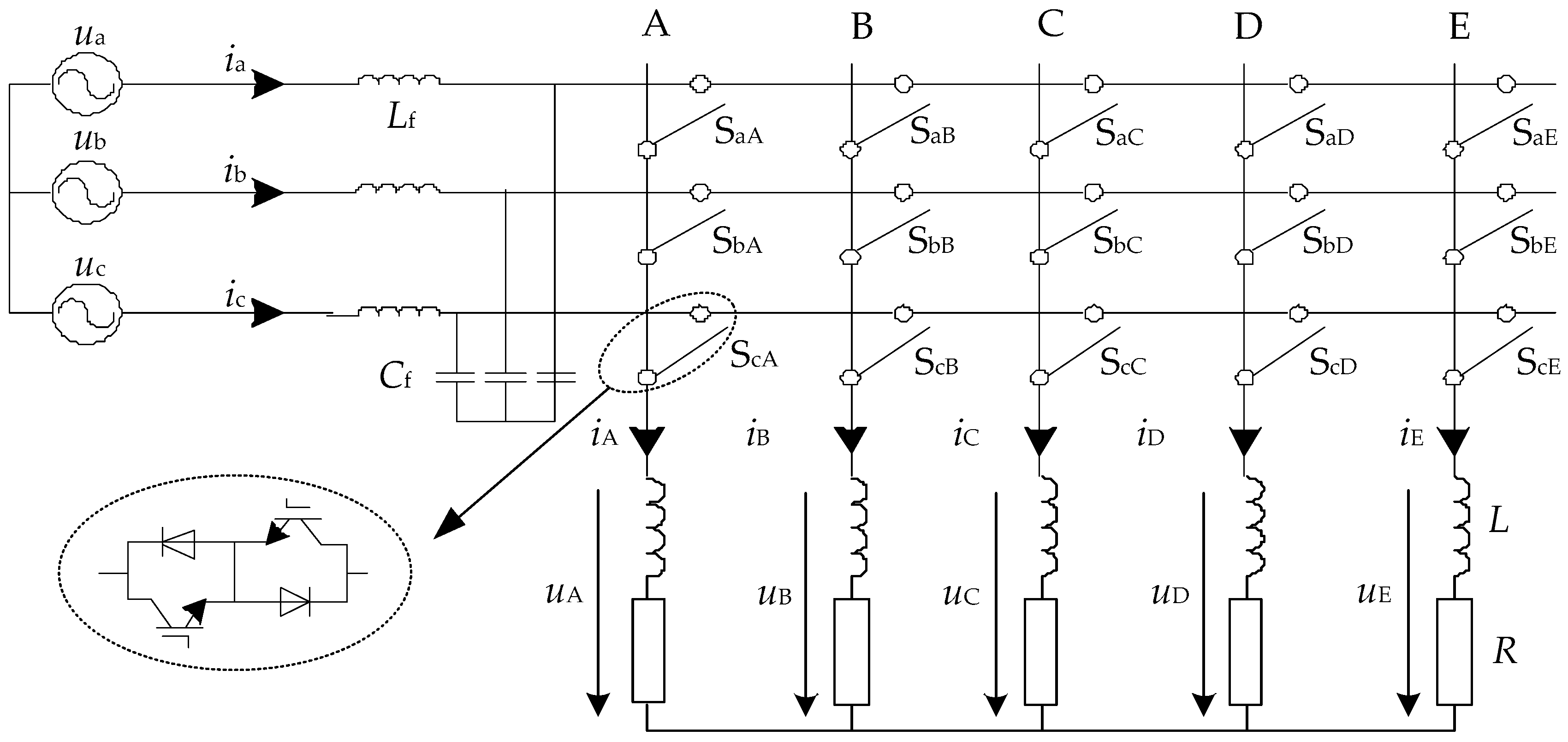
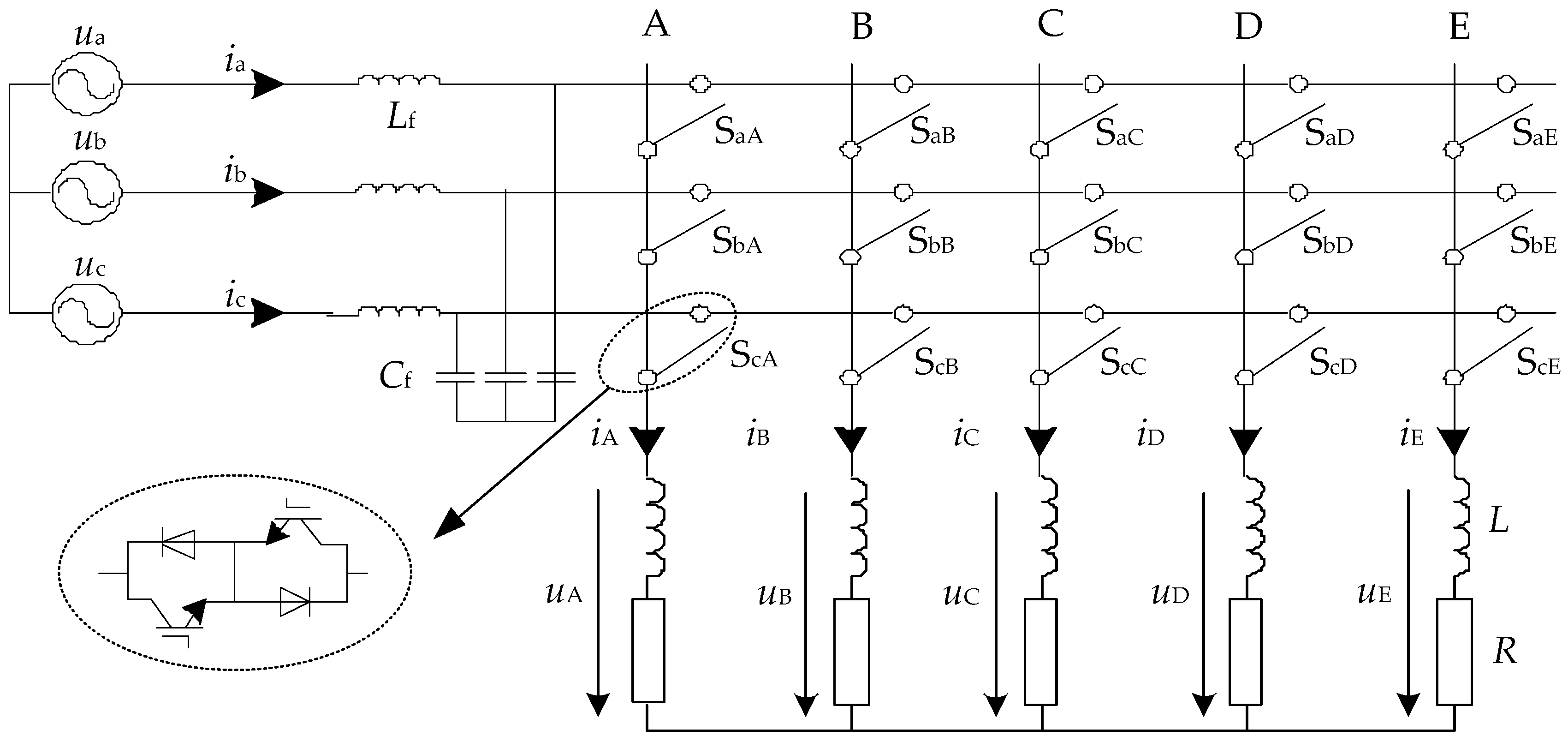
2. Modeling of the Three-to-Five Phase DMC
3. Space Vector Expression of the Three-to-Five Phase DMC
3.1. Space Vector of the Input Side
3.2. Space Vector of the Output Side
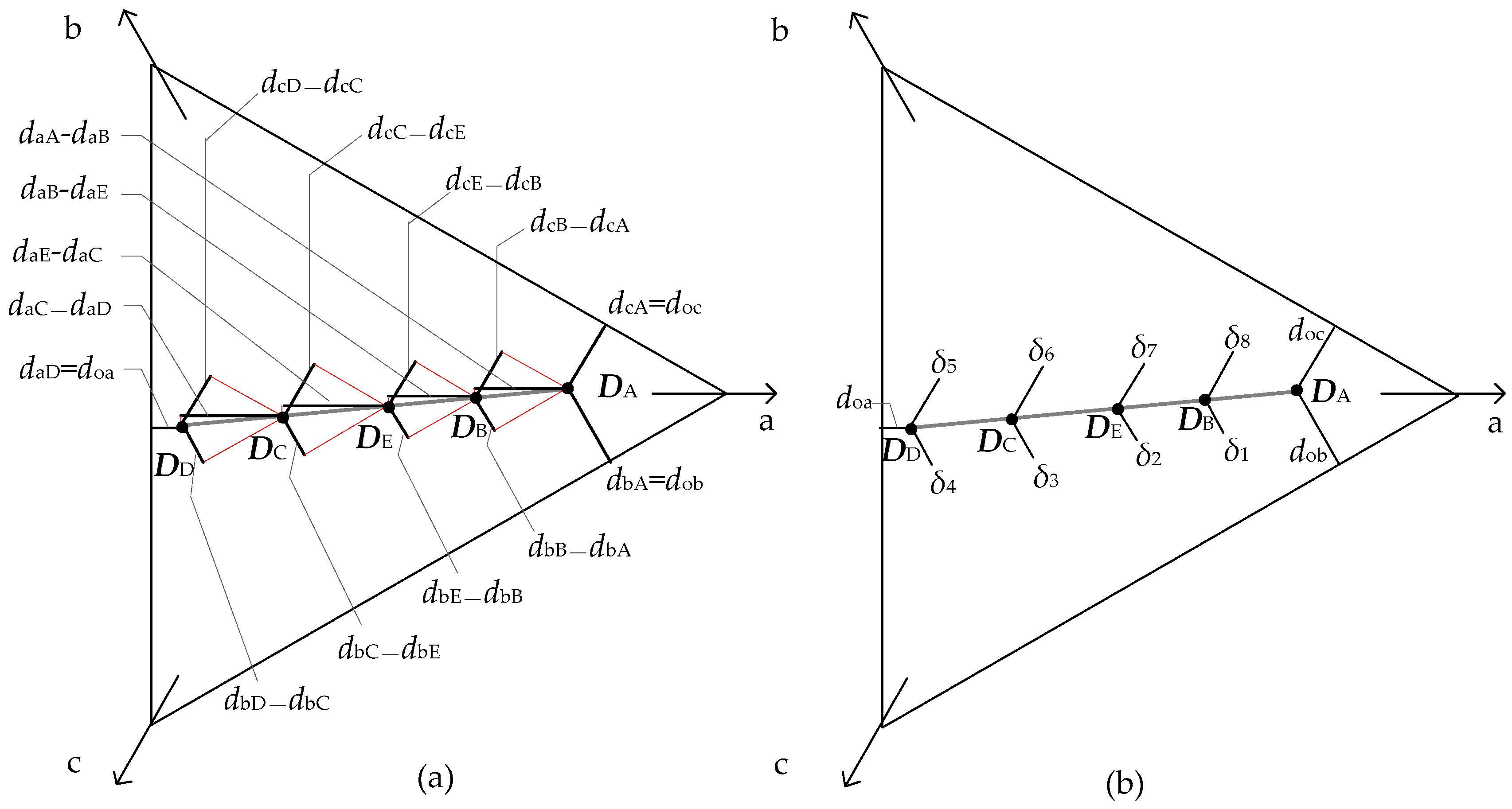
4. Duty Cycle Space Vector Approach
4.1. Single-Phase Duty Cycle Space Vector
4.2. Five-Phase Duty Cycle Space Vector
4.3. Discussion on the Permissible Maximum Value of the VTR
5. SVPWM Based on DCSV
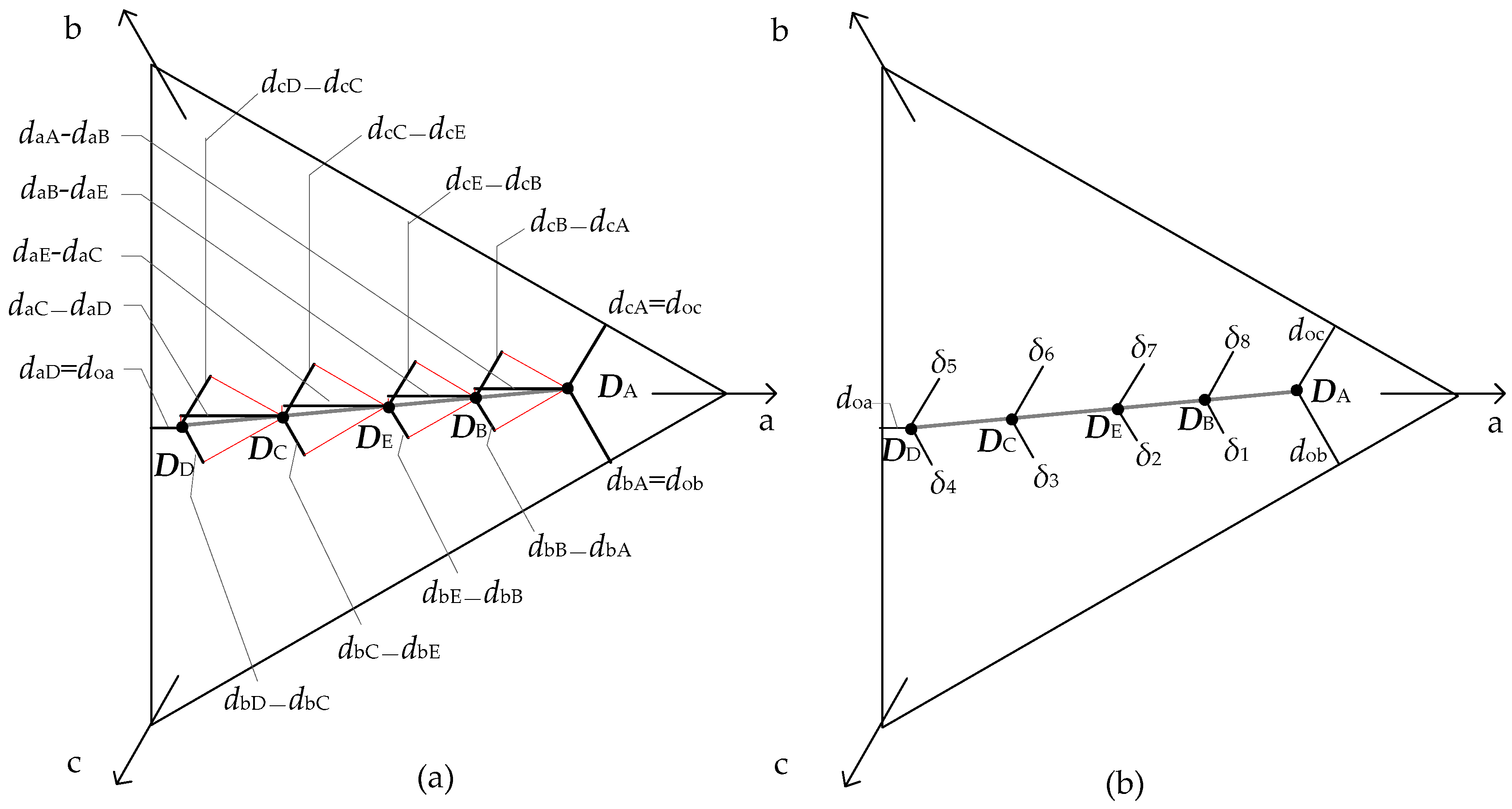
5.1. Decomposition and Simplification of Duty Cycles of the Three-to-Five Phase DMC
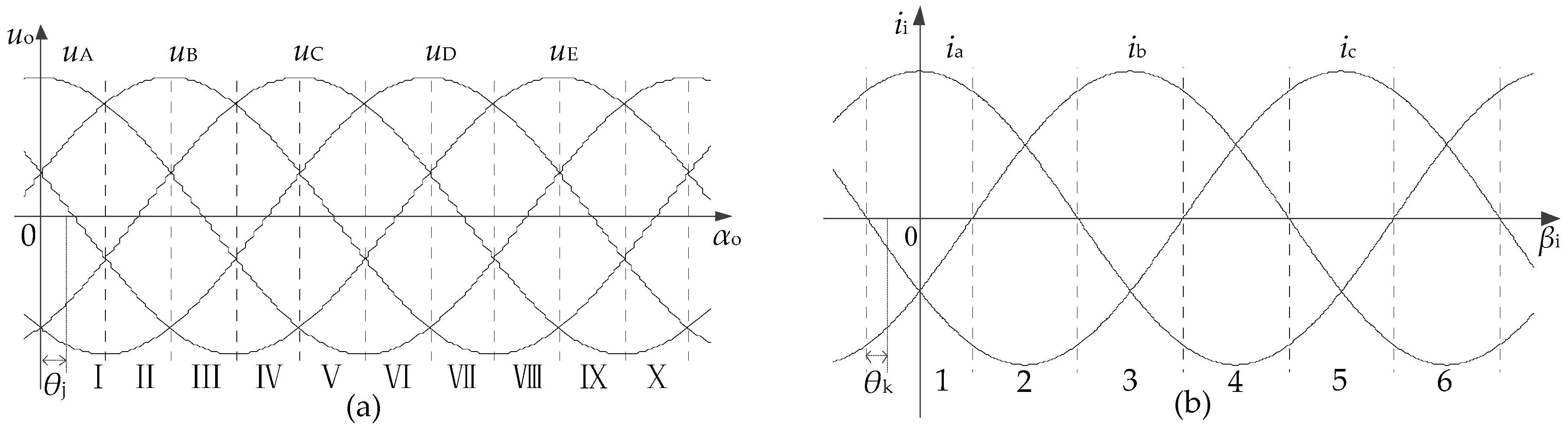
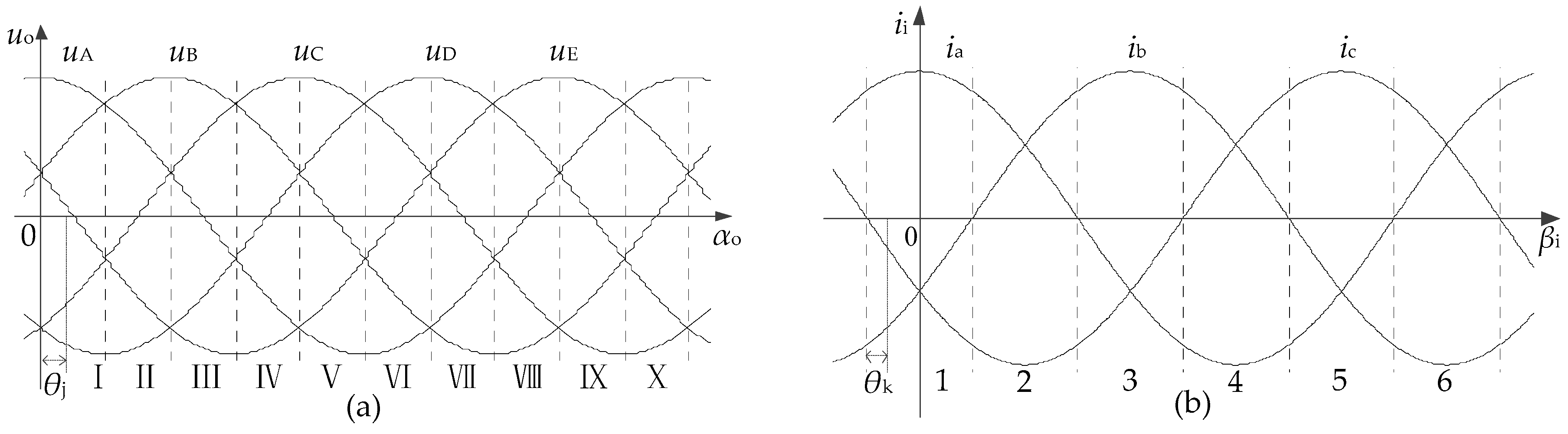
5.2. Segment Partition for Output Voltage and Input Current
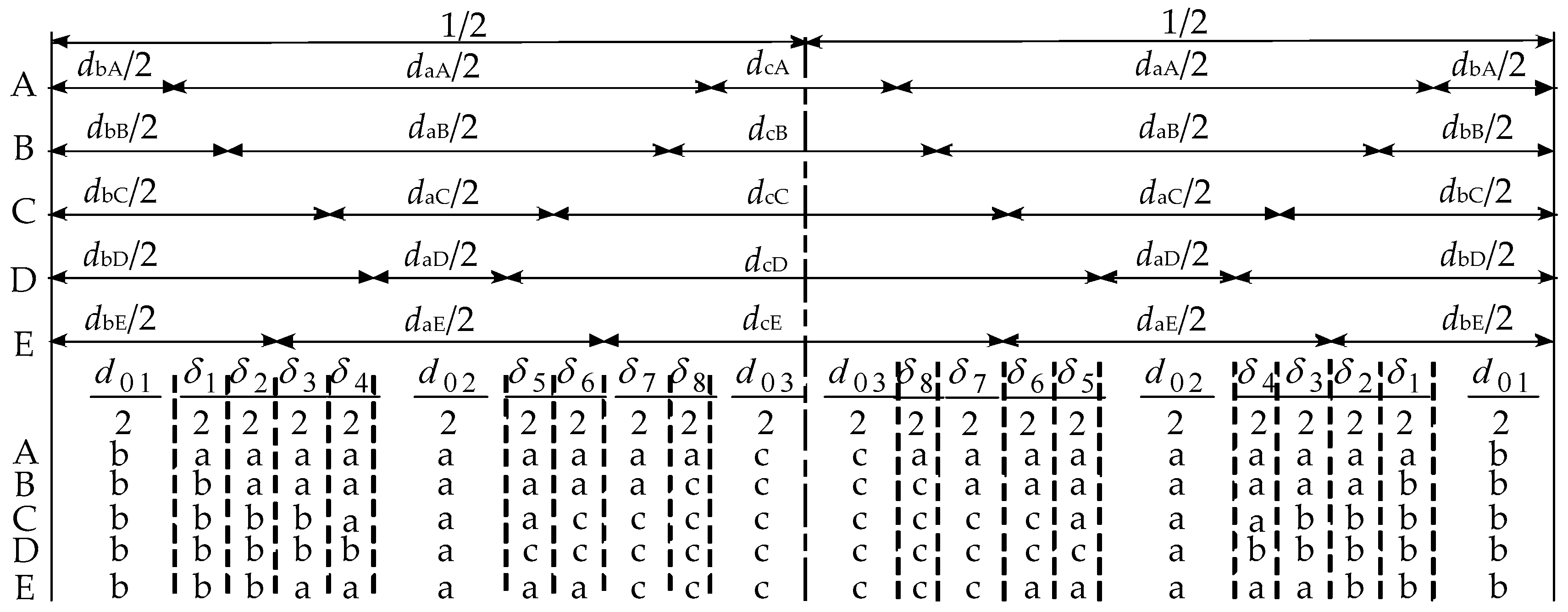
5.3. General Expression of the Recombined Duty Cycles
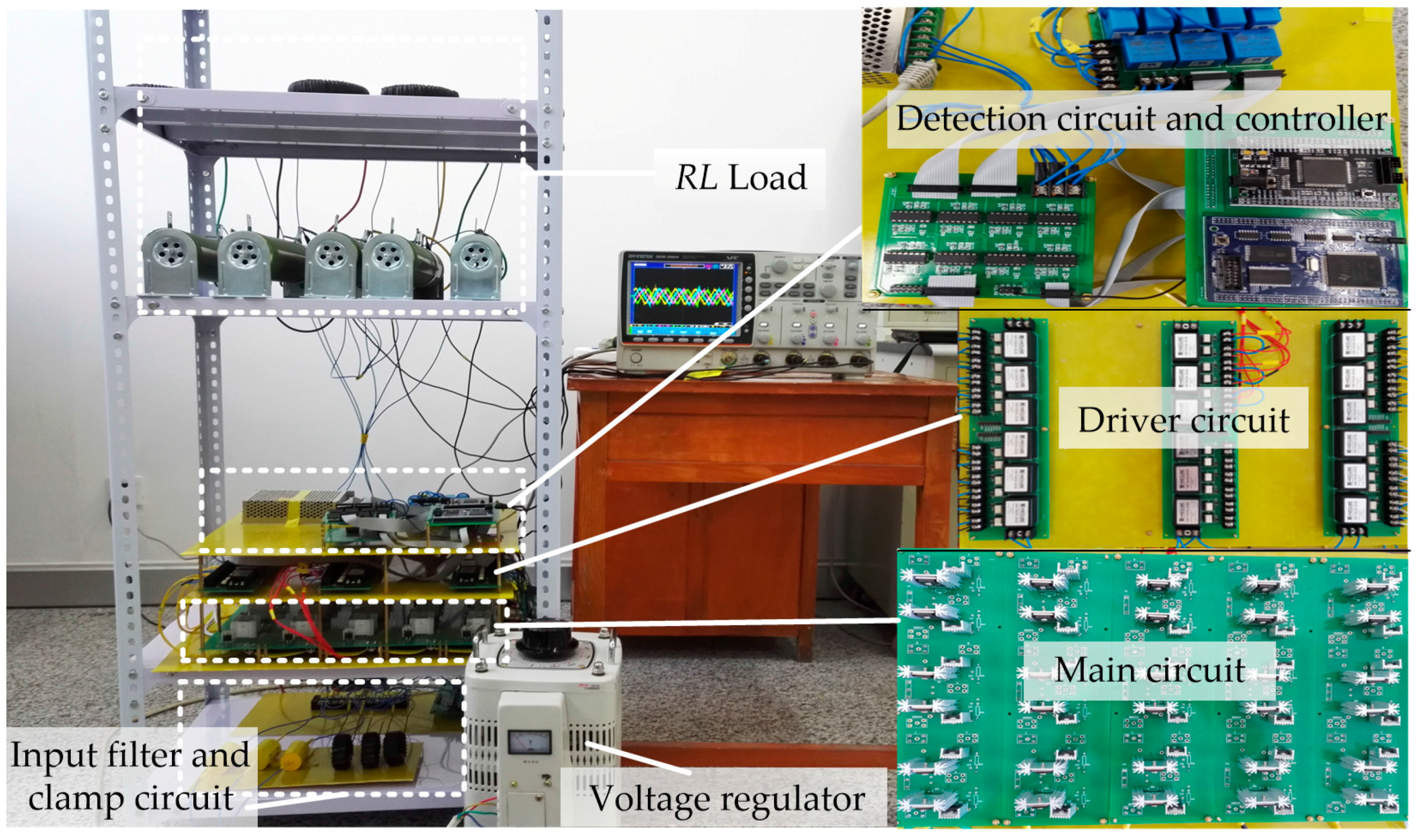
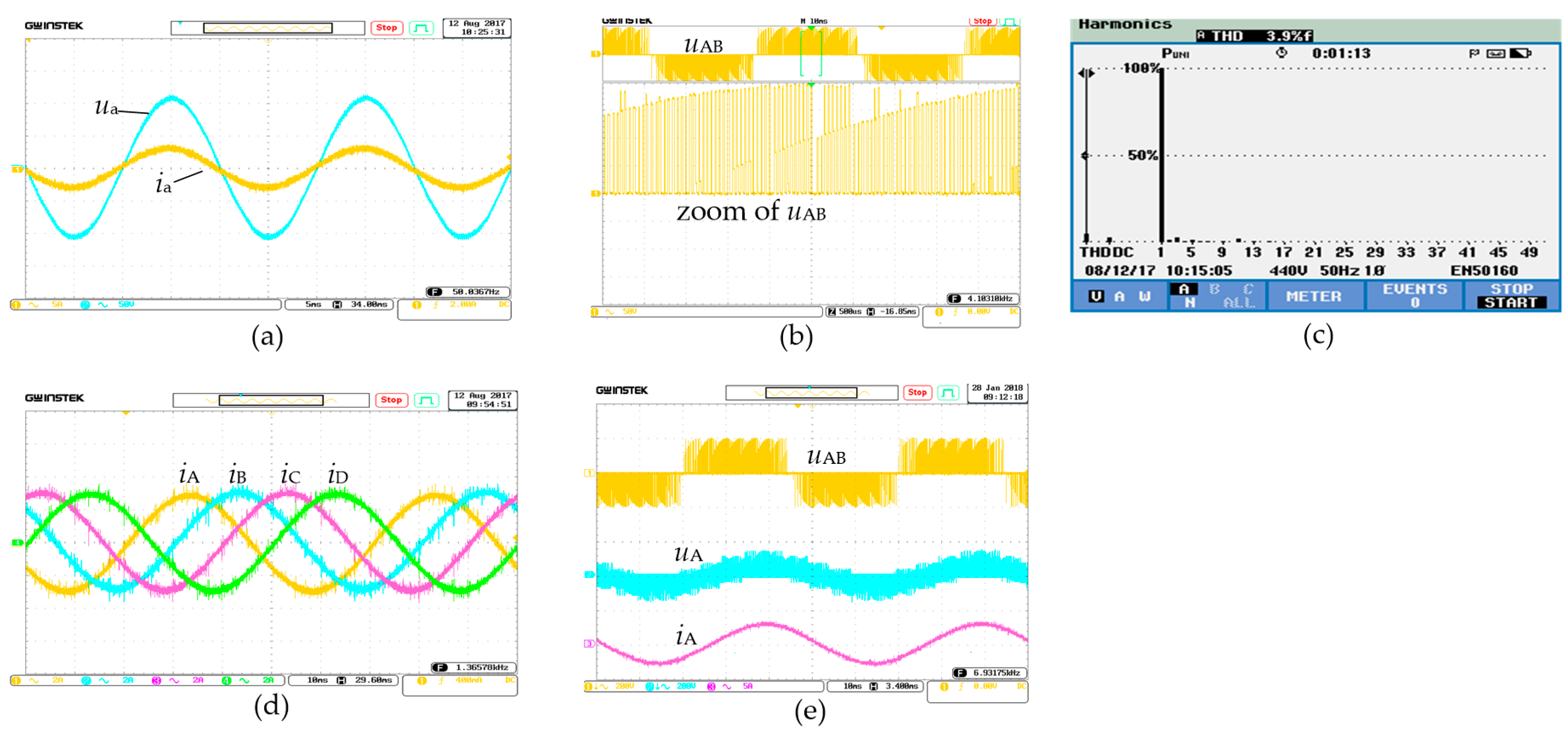
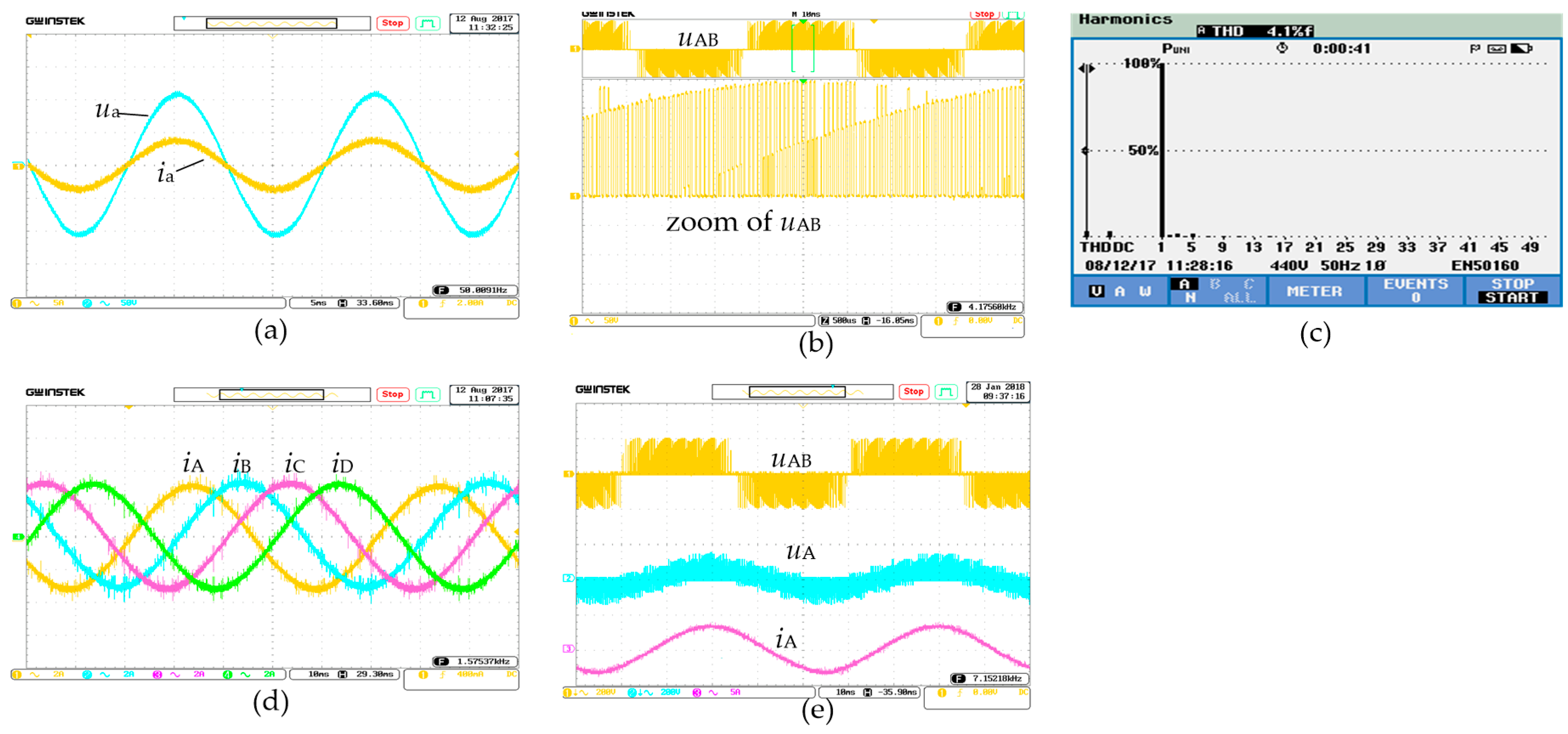
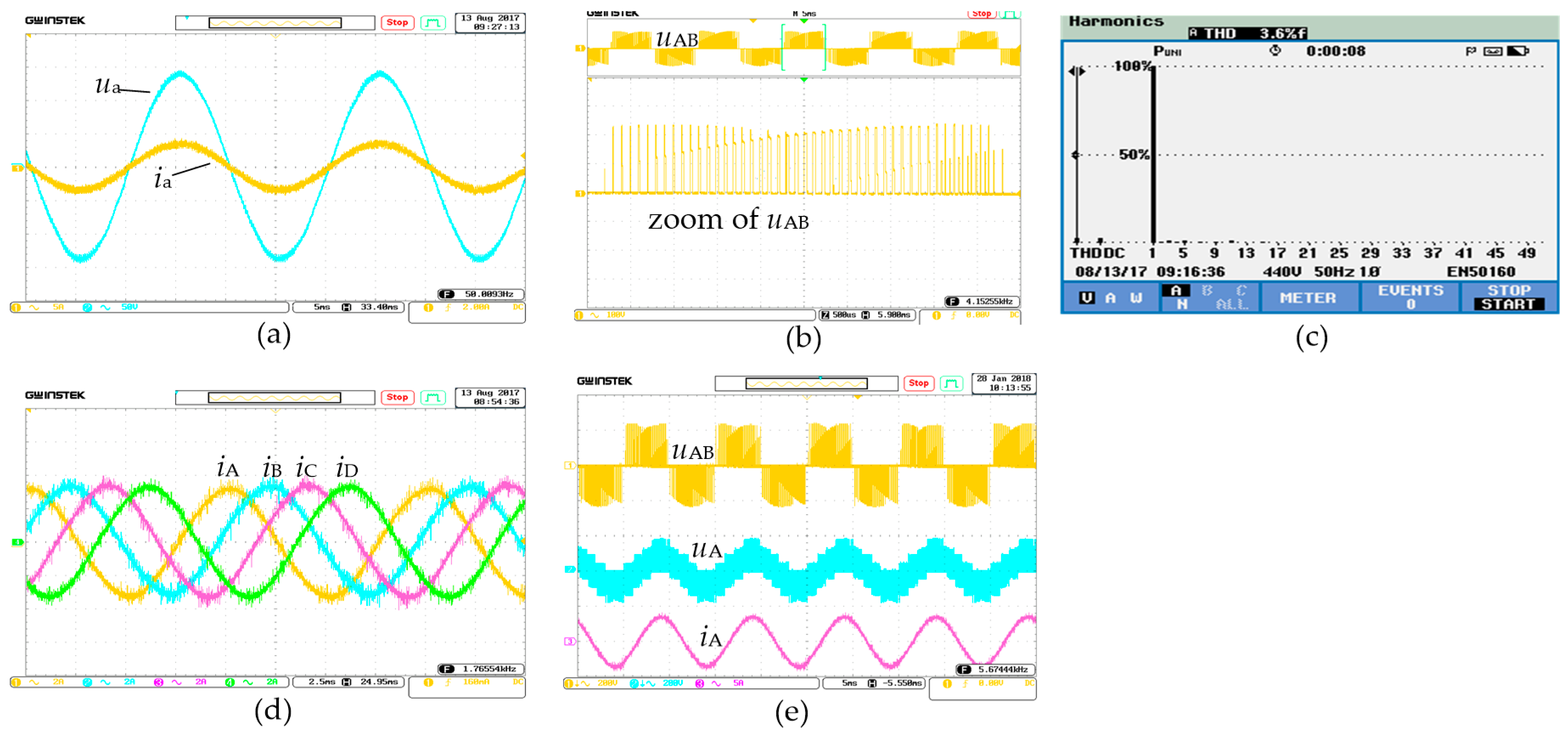
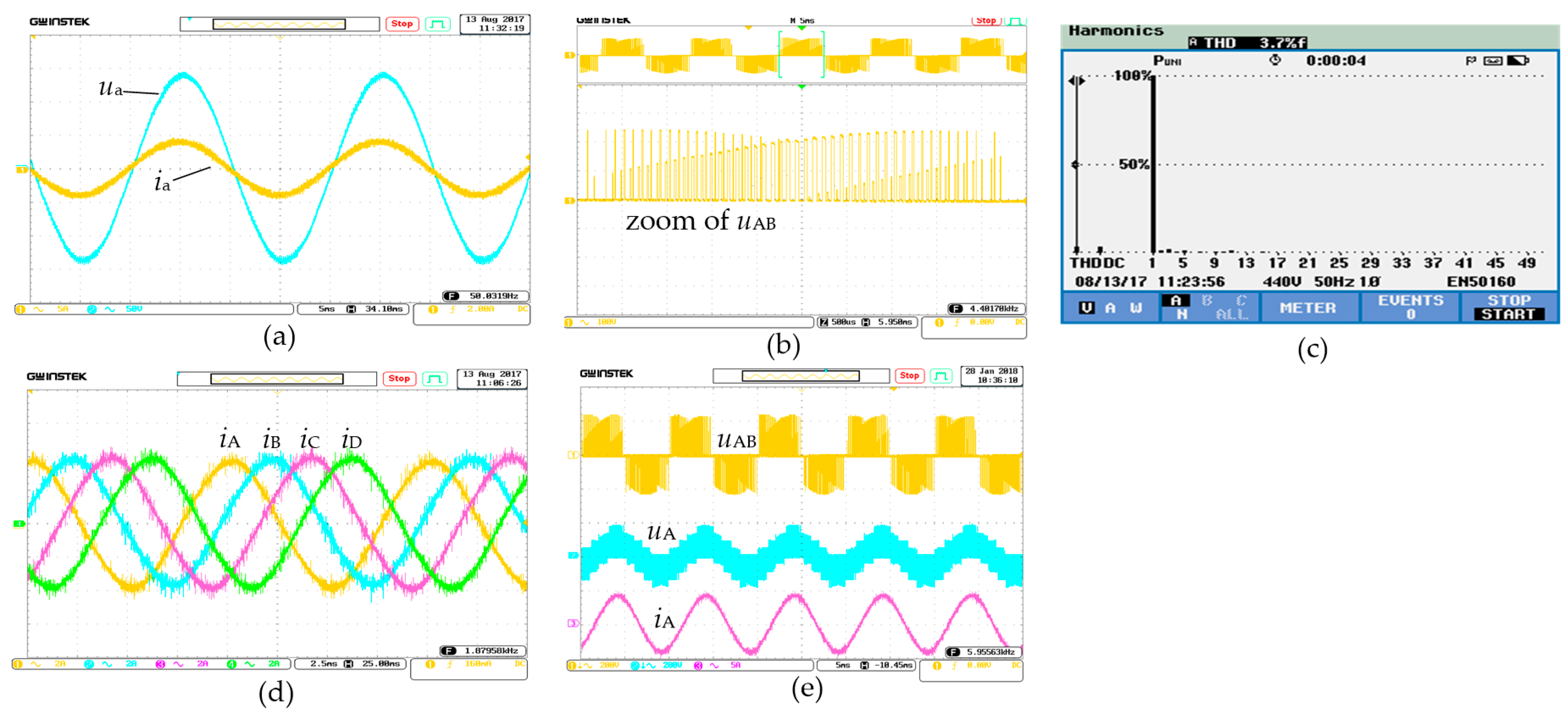
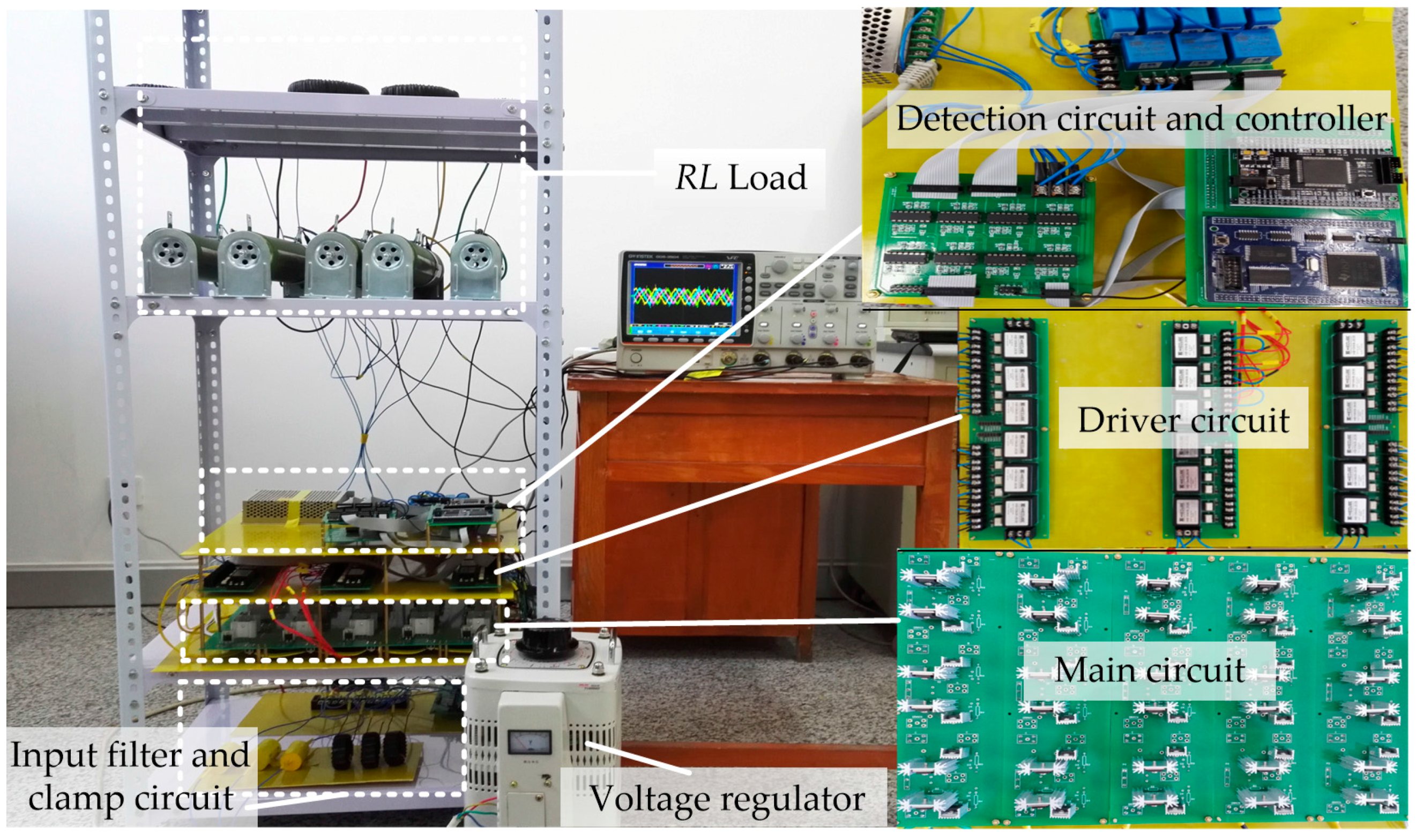
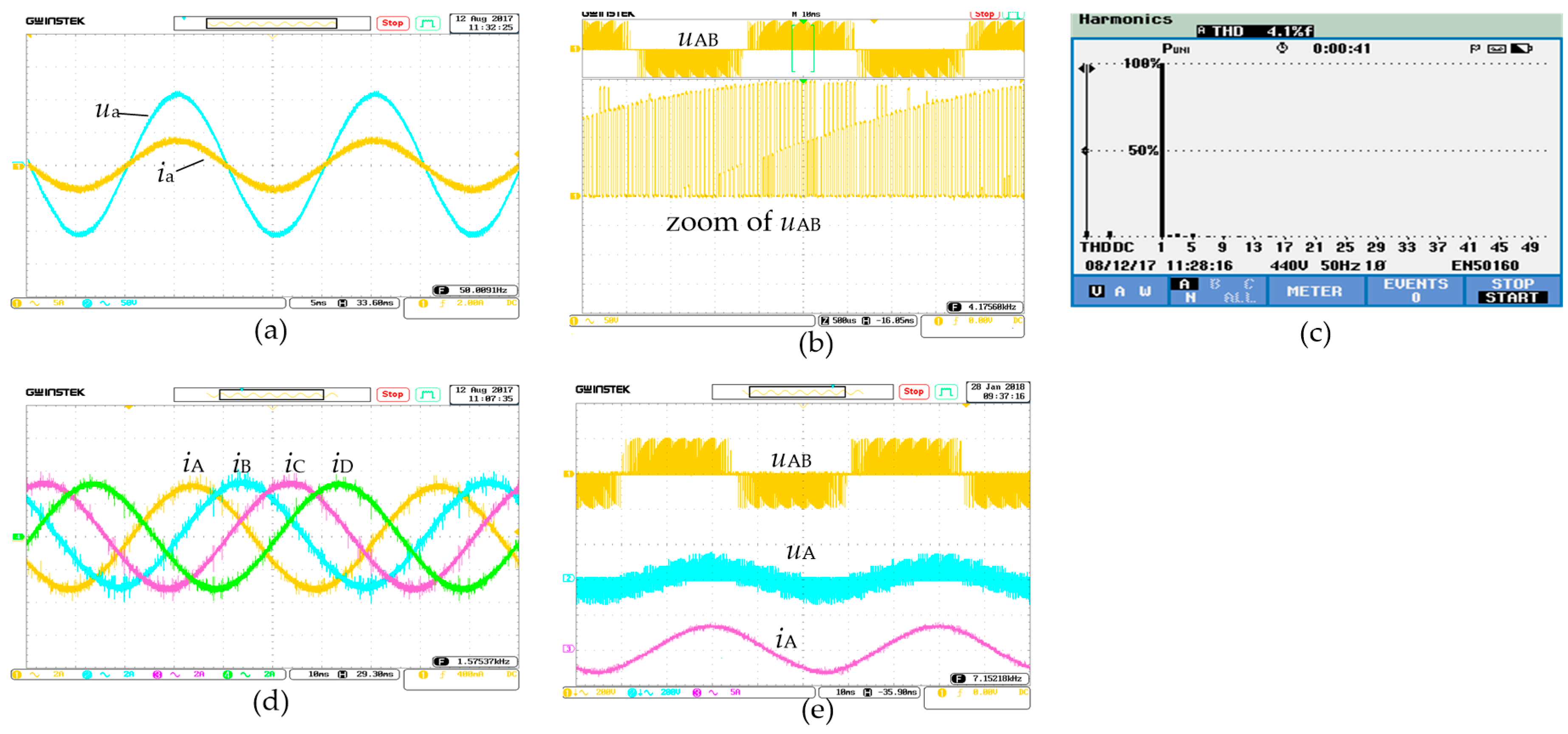
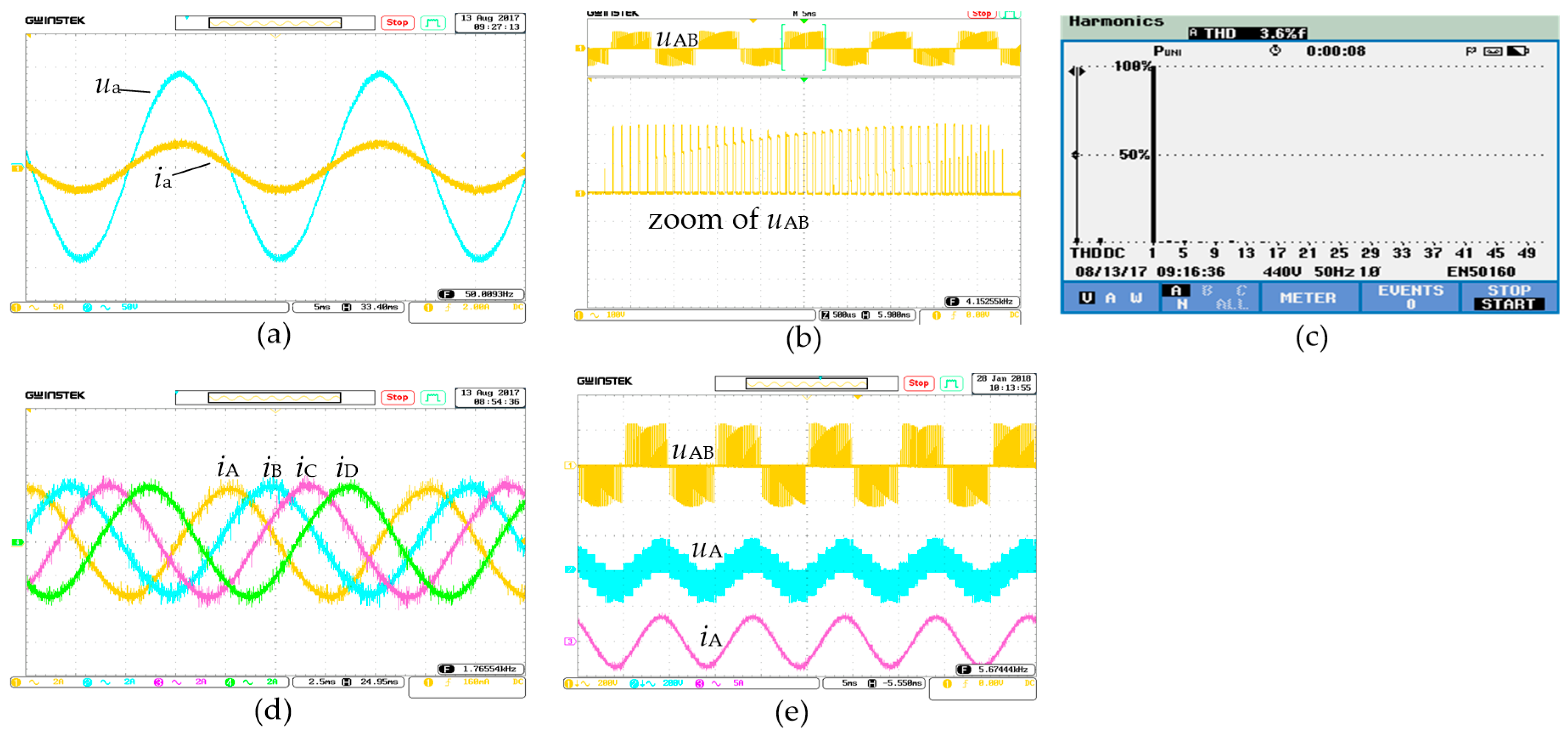
6. Experimental Results
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Huang, X.; Goodman, A.; Gerada, C.; Fang, Y.; Lu, Q. Design of a Five-Phase Brushless DC Motor for a Safety Critical Aerospace Application. IEEE Trans. Ind. Electron. 2012, 59, 3532–3541. [Google Scholar] [CrossRef]
- Levi, E.; Bodo, N.; Dordevic, O.; Dordevic, O.; Jones, M. Recent Advances in Power Electronic Converter Control for Multiphase Drive Systems. In Proceedings of the IEEE Electrical Machines Design Control and Diagnosis, Paris, France, 11–12 March 2013; pp. 158–167. [Google Scholar]
- Empringham, L.; Kolar, J.W.; Rodriguez, J.; Wheeler, P.W.; Clare, J.C. Technological Issues and Industrial Application of Matrix Converters: A Review. IEEE Trans. Ind. Electron. 2013, 60, 4260–4271. [Google Scholar] [CrossRef]
- Levi, E. Multilevel Multiphase Drive Systems-Topologies and PWM Control. In Proceedings of the IEEE International Conference Electric Machines and Drives, Chicago, IL, USA, 12–15 May 2013; pp. 1500–1508. [Google Scholar]
- Ahmed, S.M.; Abu-Rub, H.; Salarti, Z.; Rivera, M.; Ellabban, O. Generalized Carrier Based Pulse Width Modulation Technique for a Three to N-Phase Dual Matrix Converter. In Proceedings of the International Conference Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 3298–3304. [Google Scholar]
- Dabour, S.M.; Allam, S.M.; Rashad, E.M. Indirect Space-Vector PWM Technique for Three to Nine Phase Matrix Converters. In Proceedings of the GCC Conference and Exhibition, Muscat, Oman, 1–4 February 2015. [Google Scholar]
- Omrani, K.; Dami, M.A.; Jemli, M. Three to Six-Phase Direct Matrix Converters. In Proceedings of the International Conference Renewable Energy Congress, Hammamet, Tunisia, 1–5 March 2016. [Google Scholar]
- Iqbal, A.; Rahman, K.; Alammari, R.; Abu-Rub, H. Space Vector PWM for a Three-Phase to Six-Phase Direct AC/AC Converter. In Proceedings of the International Conference Industrial Technology, Seville, Spain, 17–19 March 2015; pp. 1179–1184. [Google Scholar]
- Ahmed, S.M.; Iqbal, A.; Abu-Rub, H. Simple Carrier-Based PWM Technique for a Three-to-Nine-Phase Direct AC-AC Converter. IEEE Trans. Ind. Electron. 2011, 58, 5014–5023. [Google Scholar]
- Ahmed, S.M.; Salam, Z.; Abu-Rub, H. An improved Space Vector Modulation for a Three-to-Seven-Phase Matrix Converter with Reduced Number of Switching Vectors. IEEE Trans. Ind. Electron. 2015, 62, 3327–3337. [Google Scholar] [CrossRef]
- Rodriguez, J.; Rivera, M.; Kolar, J.W.; Wheeler, P.W. A Review of Control and Modulation Methods for Matrix Converters. IEEE Trans. Ind. Electron. 2012, 59, 58–70. [Google Scholar] [CrossRef]
- Lozano-Garcia, J.M.; Ramirez, J.M. Voltage Compensator Based on a Direct Matrix Converter without Energy Storage. IET Power Electron. 2014, 8, 321–332. [Google Scholar] [CrossRef]
- Ahmed, S.M.; Iqbal, A.; Abu-Rub, H. Generalized Duty-Ratio-Based Pulsewidth Modulation Technique for a Three-to-k Phase Matrix Converter. IEEE Trans. Ind. Electron. 2011, 58, 3925–3937. [Google Scholar] [CrossRef]
- Ahmed, S.M.; Iqbal, A.; Abu-Rub, H. Space Vector PWM Technique for a Novel Three-to-Five Phase Matrix Converter. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 1875–1880. [Google Scholar]
- Iqbal, A.; Ahmed, S.M.; Abu-Rub, H. Space Vector PWM Technique for a Three-to-Five Matrix Converter. IEEE Trans. Ind. Appl. 2012, 48, 696–707. [Google Scholar] [CrossRef]
- Dabour, S.M.; Allam, S.M.; Rashad, E.M. A Simple CB-PWM Technique for Five-Phase Matrix Converters Including Over-Modulation Mode. In Proceedings of the GCC Conference and Exhibition, Muscat, Oman, 1–4 February 2015. [Google Scholar]
- Nguyen, T.D.; Lee, H. Development of a Three-to-Five-Phase Indirect Matrix Converter with Carrier-Based PWM Based on Space-Vector Modulation Analysis. IEEE Trans. Ind. Electron. 2016, 63, 13–24. [Google Scholar] [CrossRef]
- Novotny, D.W.; Lipo, T.A. Vector Control and Dynamics of AC Drives; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Ryu, H.M.; Kim, J.W.; Sul, S.K. Synchronous Frame Current Control of Multi-Phase Synchronous Motor, Part I: Modeling and Current Control Based on Multiple d-q Spaces Concept under Balanced Condition. In Proceedings of the IEEE International Conference Industry Applications Society Annual Meeting, Seoul, Korea, 3–7 October 2004; pp. 56–63. [Google Scholar]
- Casadei, D.; Serra, G.; Tani, A.; Zarri, L. Matrix Converter Modulation Strategies: A New General Approach Based on Space-Vector Representation of the Switch State. IEEE Trans. Ind. Electron. 2002, 49, 370–381. [Google Scholar] [CrossRef]
- An, X.; Lin, H.; Wang, X.W. Analysis of Commutation Strategy for Matrix Converter Based on FPGA. Power Electron. 2011, 45, 20–22. [Google Scholar]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Wang, X.; Liu, C.; Gao, X. A Duty Cycle Space Vector Modulation Strategy for a Three-to-Five Phase Direct Matrix Converter. Energies 2018, 11, 370. https://doi.org/10.3390/en11020370
Wang R, Wang X, Liu C, Gao X. A Duty Cycle Space Vector Modulation Strategy for a Three-to-Five Phase Direct Matrix Converter. Energies. 2018; 11(2):370. https://doi.org/10.3390/en11020370
Chicago/Turabian StyleWang, Rutian, Xue Wang, Chuang Liu, and Xiwen Gao. 2018. "A Duty Cycle Space Vector Modulation Strategy for a Three-to-Five Phase Direct Matrix Converter" Energies 11, no. 2: 370. https://doi.org/10.3390/en11020370
APA StyleWang, R., Wang, X., Liu, C., & Gao, X. (2018). A Duty Cycle Space Vector Modulation Strategy for a Three-to-Five Phase Direct Matrix Converter. Energies, 11(2), 370. https://doi.org/10.3390/en11020370