Driving Cycles Based on Fuel Consumption



Abstract
:1. Introduction
2. Material and Methods
- We monitored, for long periods of time, FC and vehicle speed of a fleet of vehicles of the same technology, running on regions with diverse characteristics.
- We evaluated the relative differences of the CPs of the selected fuel-based-DC with respect to the average CPs of the trips sampled. We repeated the process for a large number of subsets of sampled trips.
2.1. Regions of Study
- Urban 1, which corresponds to a flat, densely populated region. We arbitrarily selected a set of roads covering 11.5 km inside Mexico City (2255 m above sea level (m.a.s.l.)). These roads are characterized by highly congested traffic (i.e., LoS E or F).
- Urban 2, which corresponds to a flat region located on the outskirts of an urban region. We selected an 18.8 km-long road located on the outskirts of Toluca City (2611 m.a.s.l.), which has four lanes with a medium traffic flow (i.e., LoS E).
- Mountain, whose topography includes significant altitude changes (>500 m). We selected a 41.3 km-long highway connecting the cities of Toluca and Mexico. This region starts at 2255 m.a.s.l., ascends to 3313 m.a.s.l., and then it descends to 2611 m.a.s.l. with a maximum road grade of approximately 15%. It has four lanes with high traffic (~33,632 daily vehicles, i.e., LoS C).
- General, which is a combination of the previous cases. The selected set of regions spans 71.6 km, with altitude variations from 2233 to 3313 m.a.s.l. and a maximum road grade of approximately 15%. This set of regions has both urban and suburban sections.
2.2. Vehicles
2.3. Instrumentation
2.4. Data Collection
2.5. Assessment Methodology
3. Results and Discussion
3.1. Description of Driving Patterns
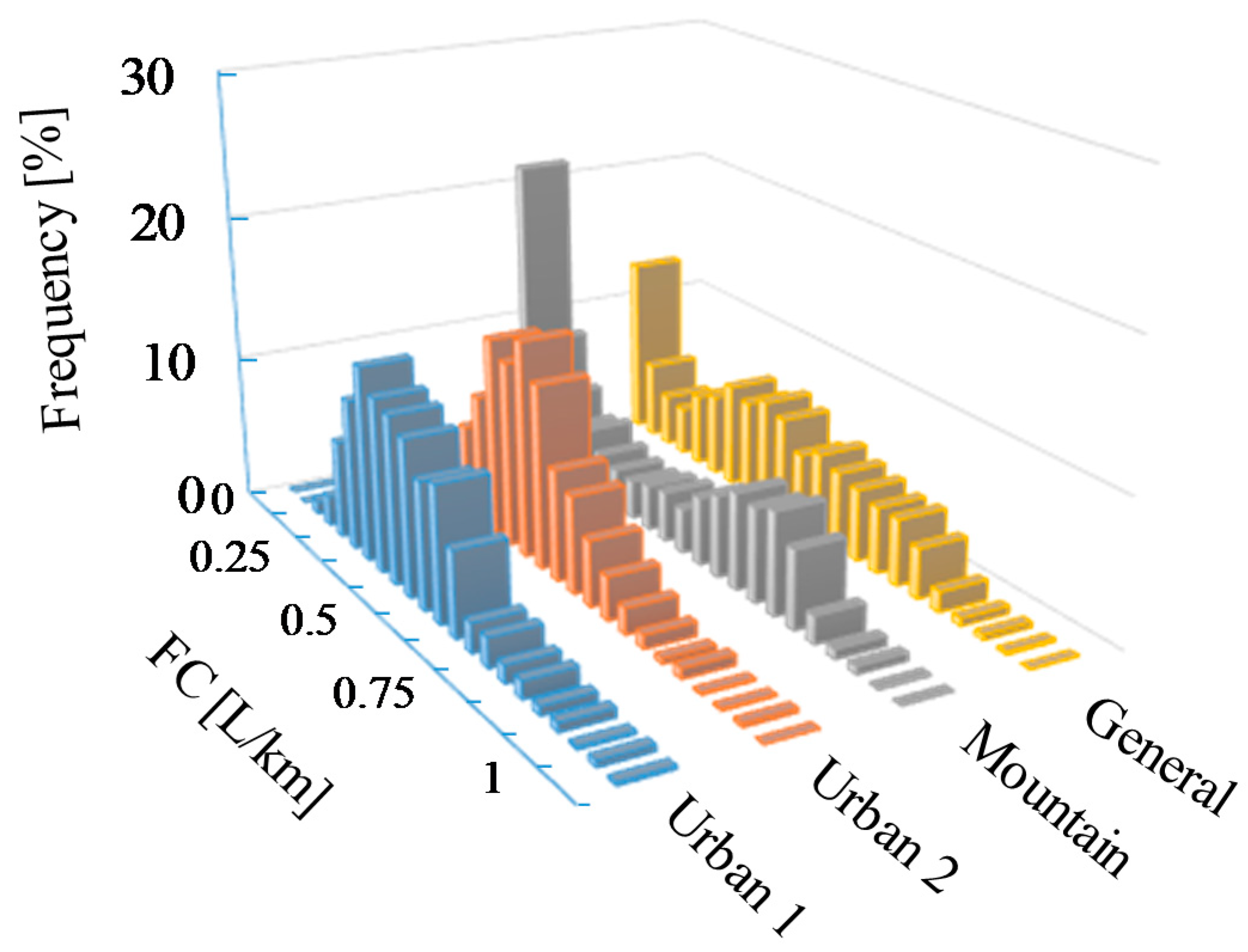
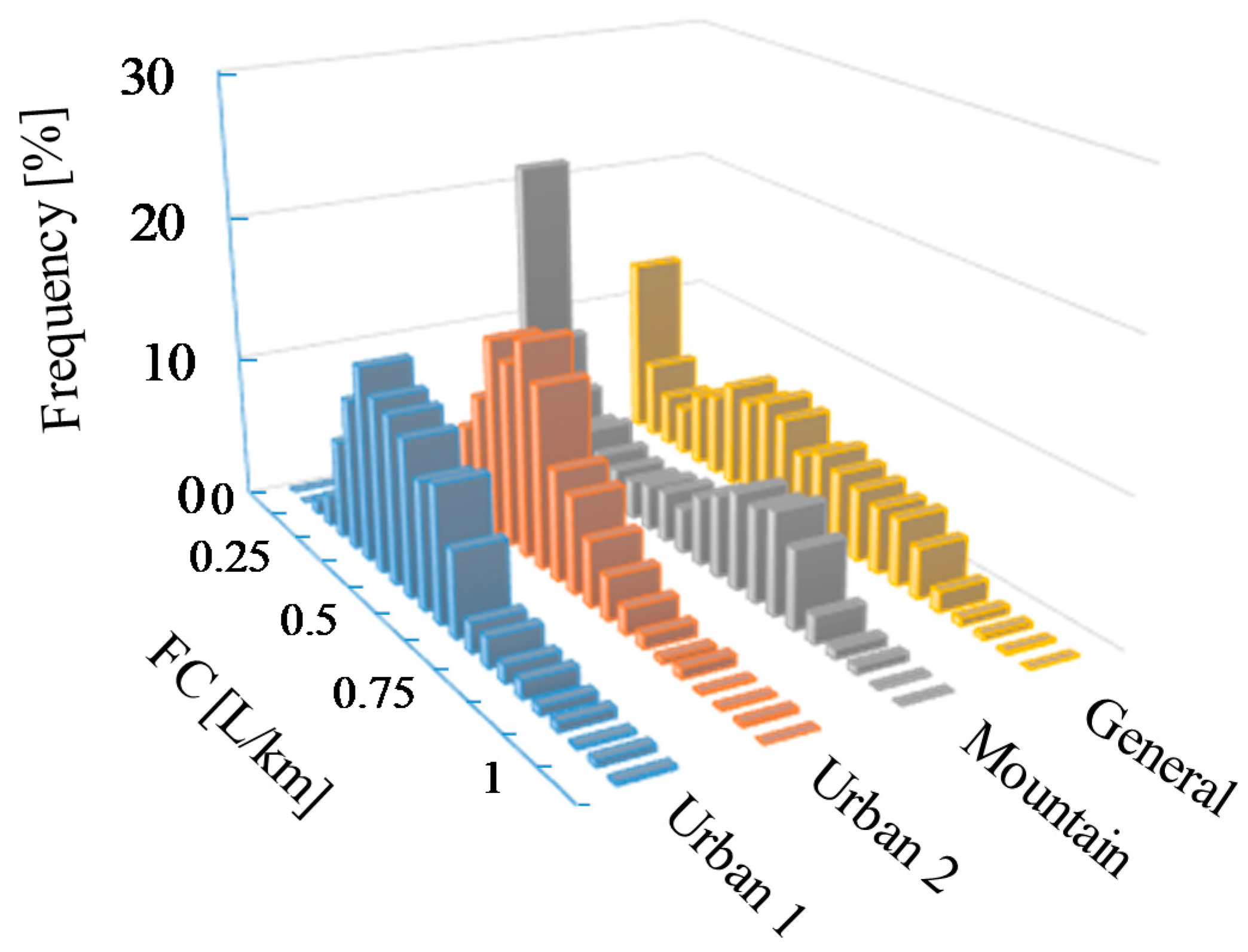
3.2. The SFC Distribution
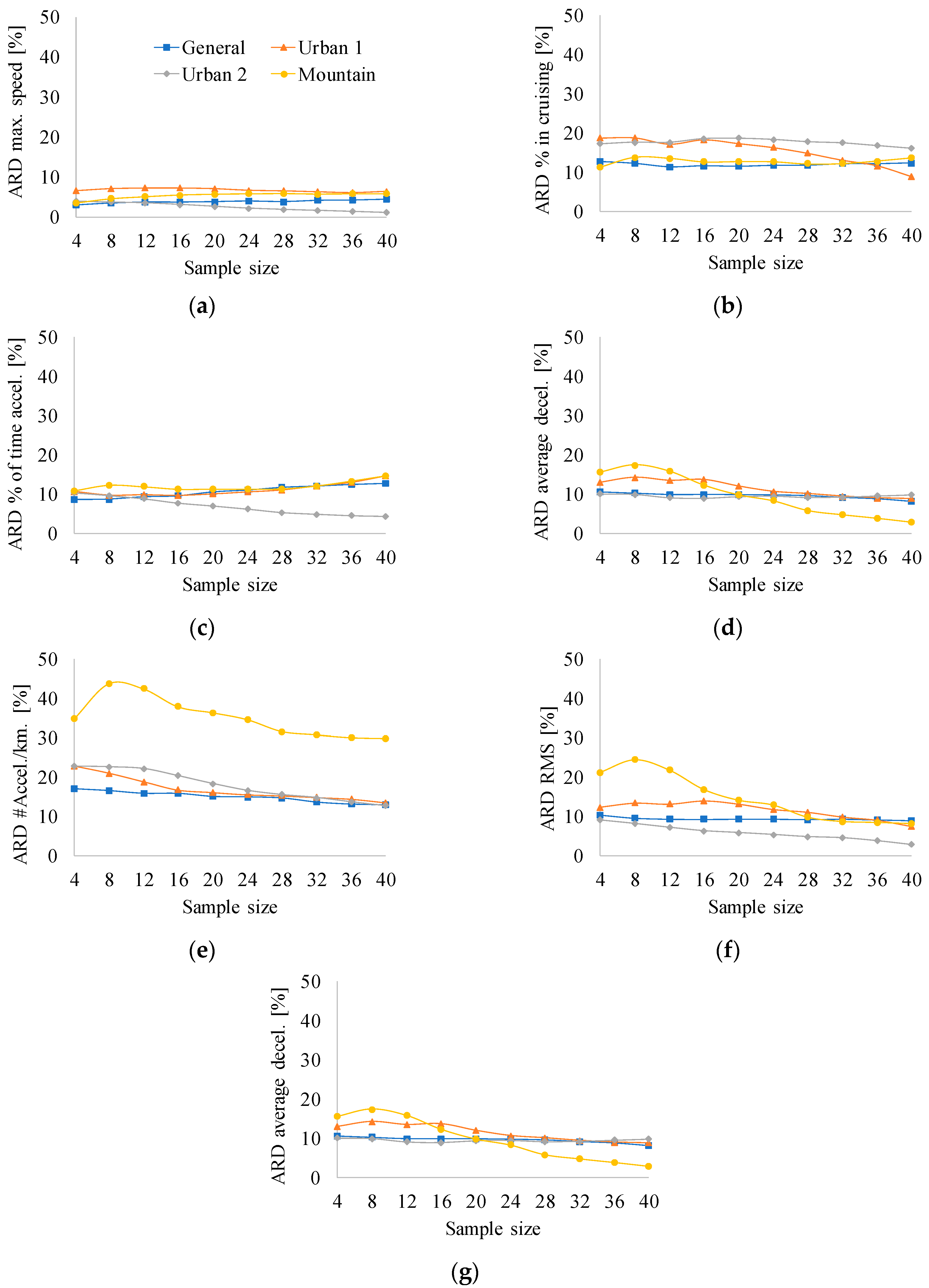
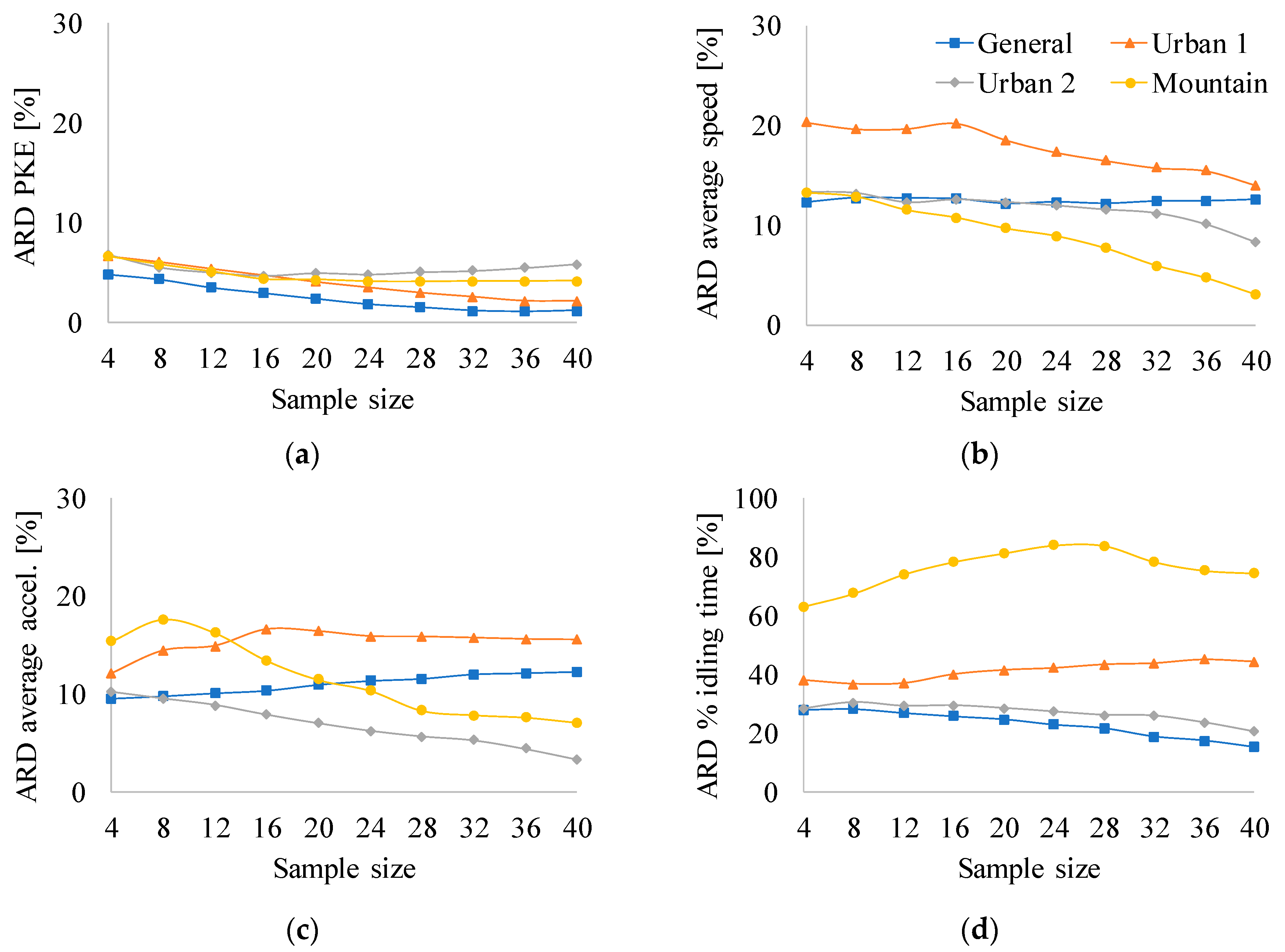
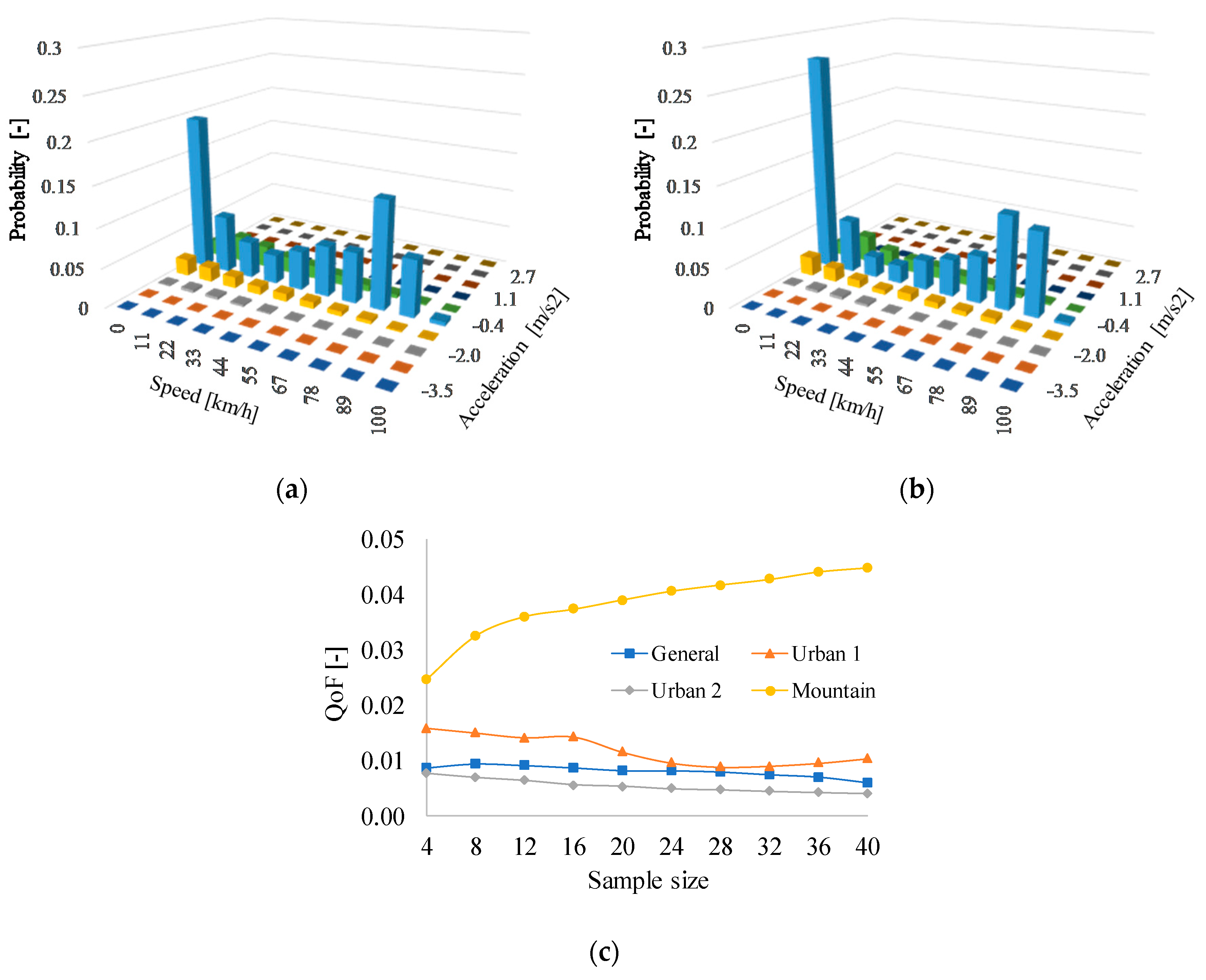
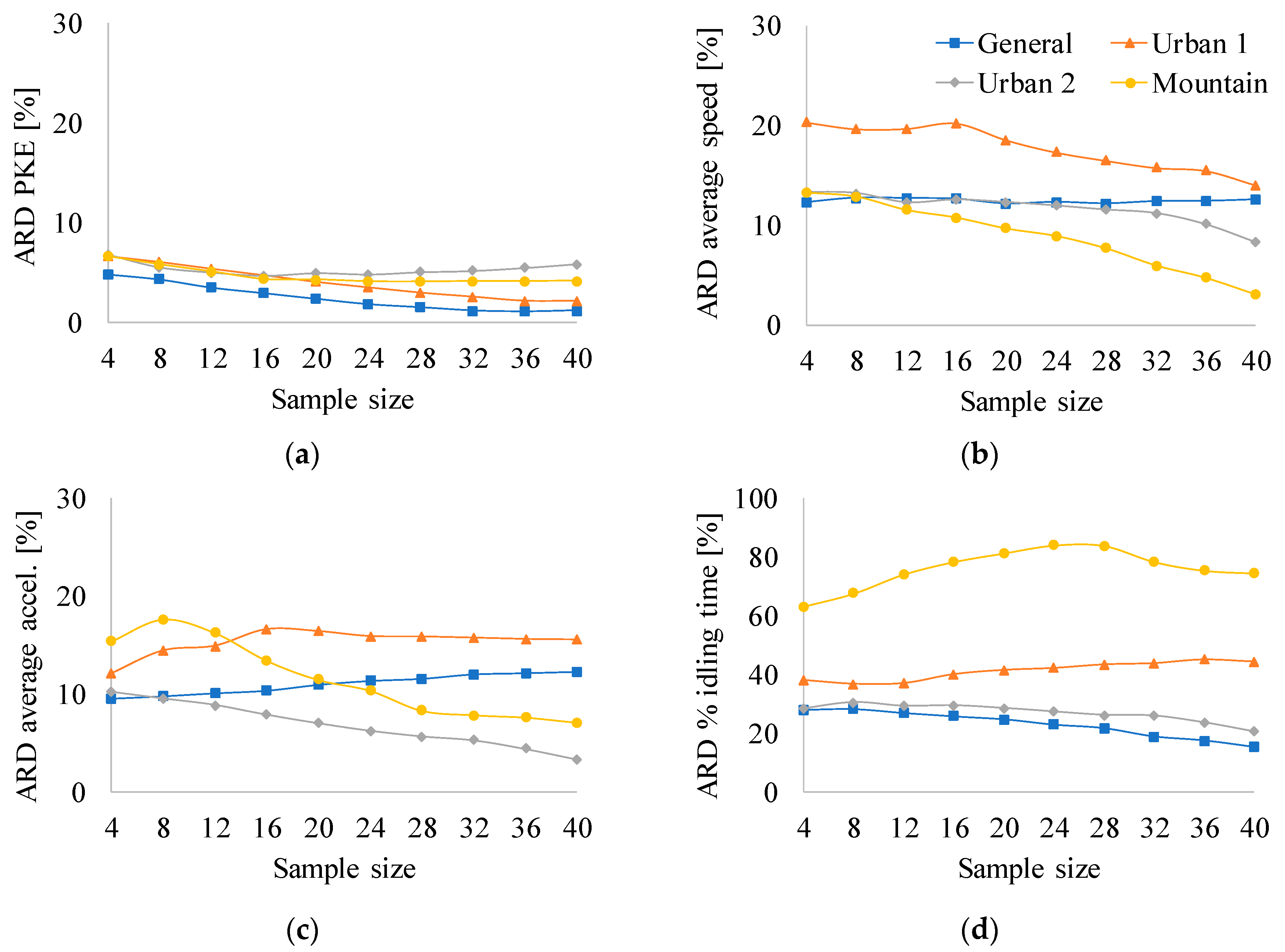
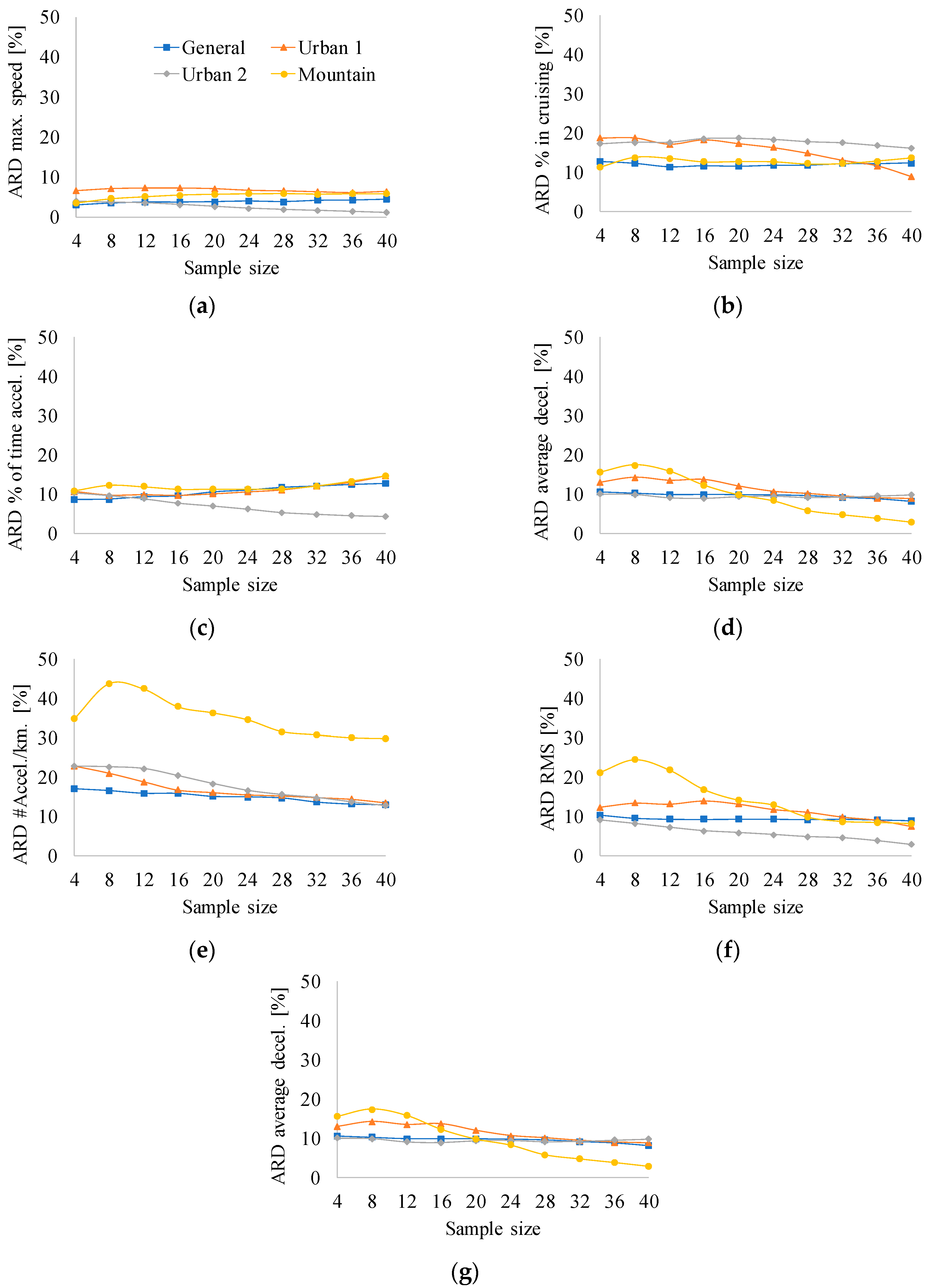
3.3. Similitude of CPs and SAFDs
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbol | Description | Unit |
| ARD | Average Relative Difference | % |
| R2 | Coefficient of determination | - |
| CP | Characteristic Parameter | - |
| DC | Driving Cycle | - |
| ECU | Engine Computer Unit | - |
| FC | Fuel Consumption | L/km |
| GPS | Global position system | - |
| LoS | Level of Service | - |
| m.a.s.l. | Meters above sea level | m |
| OBD | On board diagnosis system | - |
| PKE | Positive kinetic energy per distance traveled | m/s2 |
| QoF | Quality of Fit | - |
| SAPD | Speed acceleration probability distribution | - |
Appendix A
References
- Tietge, U.; Mock, P.; Franco, V.; Zacharof, N. From laboratory to road: Modeling the divergence between official and real-world fuel consumption and CO2 emission values in the German passenger car market for the years 2001–2014. Energy Policy 2017, 103, 212–222. [Google Scholar] [CrossRef]
- Brundell-Freij, K.; Ericsson, E. Influence of street characteristics, driver category and car performance on urban driving patterns. Transp. Res. Part D Transp. Environ. 2005, 10, 213–229. [Google Scholar] [CrossRef]
- Ericsson, E. Independent driving pattern factors and their influence on fuel use and exhaust emission factors. Transp. Res. Part D Transp. Environ. 2001, 6, 325–345. [Google Scholar] [CrossRef]
- Tong, H.Y.; Hung, W.T. A framework for developing driving cycles with on-road driving data. Transp. Rev. 2010, 30, 589–615. [Google Scholar] [CrossRef]
- Achour, H.; Olabi, A.G. Driving cycle developments and their impacts on energy consumption of transportation. J. Clean. Prod. 2016, 112, 1778–1788. [Google Scholar] [CrossRef]
- Ashtari, A.; Bibeau, E.; Shahidinejad, S.; Ashtari, A. Using Large Driving Record Samples and a Stochastic Approach for Real-World Driving Cycle Construction: Winnipeg Driving Cycle. Transp. Sci. 2014, 48, 170–183. [Google Scholar] [CrossRef]
- Giakoumis, E.G. Driving and Engine Cycles; Springer: Cham, Switzerland, 2017; p. 422. ISBN 978-3-319-49033-5. [Google Scholar]
- Huang, D.; Xie, H.; Ma, H.; Sun, Q. Driving cycle prediction model based on bus route features. Transp. Res. Part D 2017, 54, 99–113. [Google Scholar] [CrossRef]
- Ko, J.; Jin, D.; Jang, W.; Myung, C.L.; Kwon, S.; Park, S. Comparative investigation of NOxemission characteristics from a Euro 6-compliant diesel passenger car over the NEDC and WLTC at various ambient temperatures. Appl. Energy 2017, 187, 652–662. [Google Scholar] [CrossRef]
- Barlow, T.; Latham, S.; Mccrae, I.; Boulter, P. A Reference Book of Driving Cycles for Use in the Measurement of Road Vehicle Emissions; TRL Published Project Report; Transport Research Laboratory: Wokingham, UK, 2009. [Google Scholar]
- Brady, J.; Mahony, M.O. Development of a driving cycle to evaluate the energy economy of electric vehicles in urban areas. Appl. Energy 2016, 177, 165–178. [Google Scholar] [CrossRef]
- Tamsanya, N.; Chungpaibulpatana, S. Influence of driving cycles on exhaust emissions and fuel consumption of gasoline passenger car in Bangkok. J. Environ. Sci. 2009, 21, 604–611. [Google Scholar] [CrossRef]
- Pavlovic, J.; Ciuffo, B.; Fontaras, G.; Valverde, V.; Marotta, A. How much difference in type-approval CO2 emissions from passenger cars in Europe can be expected from changing to the new test procedure (NEDC vs. WLTP)? Transp. Res. Part A Policy Pract. 2018, 111, 136–147. [Google Scholar] [CrossRef]
- Tutuianu, M.; Bonnel, P.; Ciuffo, B.; Haniu, T.; Ichikawa, N.; Marotta, A.; Pavlovic, J.; Steven, H. Development of the World-wide harmonized Light duty Test Cycle (WLTC) and a possible pathway for its introduction in the European legislation. Transp. Res. Part D Transp. Environ. 2015, 40, 61–75. [Google Scholar] [CrossRef]
- Ho, S.; Wong, Y.; Chang, V.W. Developing Singapore Driving Cycle for passenger cars to estimate fuel consumption and vehicular emissions. Atmos. Environ. 2014, 97, 353–362. [Google Scholar] [CrossRef]
- Shi, Q.; Zheng, Y.; Wang, R.; Li, Y. The study of a new method of driving cycles construction. Procedia Eng. 2011, 16, 79–87. [Google Scholar] [CrossRef]
- Hung, W.T. Development of a practical driving cycle construction methodology: A case study in Hong Kong. Transp. Res. Part D 2007, 12, 115–128. [Google Scholar] [CrossRef]
- Bishop, J.D.K.K.; Axon, C.J.; Mcculloch, M.D. A robust, data-driven methodology for real-world driving cycle development. Transp. Res. Part D Transp. Environ. 2012, 17, 389–397. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, D.-J.; Shen, J.-M. Energy Procedia A Synthesis of Methodologies and Practices for Developing Driving Cycles. Energy Procedia 2012, 16, 1868–1873. [Google Scholar] [CrossRef]
- Gong, Q.; Midlam-Mohler, S.; Marano, V.; Rizzoni, G. An Iterative Markov Chain Approach for Generating Vehicle Driving Cycles. SAE Int. 2011, 4, 1035–1045. [Google Scholar] [CrossRef]
- Lin, J.; Niemeier, D.A. An exploratory analysis comparing a stochastic driving cycle to California’s regulatory cycle. Atmos. Environ. 2002, 36, 5759–5770. [Google Scholar] [CrossRef]
- Shi, S.; Lin, N.; Zhang, Y.; Cheng, J.; Huang, C.; Liu, L.; Lu, B. Research on Markov property analysis of driving cycles and its application. Transp. Res. Part D 2016, 47, 171–181. [Google Scholar] [CrossRef]
- Huertas, J.I.I.; Díaz, J.; Cordero, D.; Cedillo, K. A new methodology to determine typical driving cycles for the design of vehicles power trains. Int. J. Interact. Des. Manuf. 2018, 12, 319–326. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Khattak, A. Customizing driving cycles to support vehicle purchase and use decisions: Fuel economy estimation for alternative fuel vehicle users. Transp. Res. Part C Emerg. Technol. 2016, 67, 280–298. [Google Scholar] [CrossRef]
- National Academies of Science. Highway Capacity Manual 2010; National Academies of Science: Washington, DC, USA, 2010; ISBN 0738-6826. [Google Scholar]
- Huertas, J.I.; Álvarez Coello, G.A. Accuracy and precision of the drag and rolling resistance coefficients obtained by on road coast down tests. In Proceedings of the International Conference on Industrial Engineering and Operations Management, Bogota, Colombia, 25–26 October 2017. [Google Scholar]
- Pīrs, V.; Jesko, Ž.; Lāceklis-Bertmanis, J. Determination methods of fuel consumption in laboratory conditions. Eng. Rural Dev. 2008, 1, 154–159. [Google Scholar]
- SAE International. J1321: Fuel Consumption Test Procedure—Type II; SAE International: Warrendale, PA, USA, 2012. [Google Scholar]
- Günther, R.; Wenzel, T.; Wegner, M.; Rettig, R. Big data driven dynamic driving cycle development for busses in urban public transportation. Transp. Res. Part D 2017, 51, 276–289. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Urban 1 | Urban 2 | Uphill | Mountain | General |
|---|---|---|---|---|---|---|
| Location | - | Mexico City | TOL | - | - | TOL-MEX |
| Facility | - | Local roadway | Arterial | Freeway | Freeway | Combined |
| Level of traffic | - | High | Medium | Medium | Low-Medium | Low-High |
| LoS * | - | F | E | C | C-B | B-F |
| Speed limit | km/h | 60 | 60 | 80 | 110 | 60–110 |
| Number of lanes | - | 3 | 3 | 4 | 4 | 3–4 |
| Length | km | 11.5 | 18.8 | 16.1 | 41.3 | 71.6 |
| Ave road grade | % | 1.4 | 1.8 | 6.1 | 5.6 | 4.0 |
| Max road grade | % | 5.2 | 9.0 | 15.0 | 15.0 | 15.0 |
| Min altitude | m.a.s.l. | 2255 | 2611 | 2255 | 2233 | 2233 |
| Max altitude | m.a.s.l. | 2258 | 2637 | 3313 | 3313 | 3313 |
| Variable | Instrument/Trademark | Technical Characteristics |
|---|---|---|
| Position: latitude, longitude and altitude Speed and time | GPS/Garmin 16x | Position: 3–5 m, 95% typical Frequency: 1 Hz Speed: 0.05 m/s RMS steady state PPS time: 1 microsecond at rising edge of PPS pulse |
| Instantaneous fuel consumption | - | Estimated through the injection time Reported by ECU through OBD2 |
| CP | Unit | Regions | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| General | Urban 1 | Urban 2 | Mountain | HD UDDS | |||||||||||
| Dynamics | RMS | m/s2 | 0.39 | ± | 0.01 | 0.41 | ± | 0.02 | 0.43 | ± | 0.02 | 0.35 | ± | 0.02 | 0.47 |
| PKE | m/s2 | 0.25 | ± | 0.01 | 0.34 | ± | 0.02 | 0.34 | ± | 0.02 | 0.19 | ± | 0.01 | 0.27 | |
| Accelerations per kilometre | km−1 | 7.9 | ± | 0.8 | 11.8 | ± | 2.5 | 8.5 | ± | 0.8 | 6.6 | ± | 0.8 | 10.7 | |
| Operation modes | Percentage idling | % | 14.7 | ± | 1.7 | 21.9 | ± | 3.9 | 20.3 | ± | 2.7 | 2.6 | ± | 0.9 | 33.3 |
| Percentage acceleration | % | 27.6 | ± | 1.0 | 27.6 | ± | 1.9 | 28.8 | ± | 1.7 | 27.3 | ± | 1.4 | 22.2 | |
| Percentage deceleration | % | 24.6 | ± | 0.8 | 25.9 | ± | 1.5 | 25.0 | ± | 1.7 | 24.3 | ± | 1.2 | 20.2 | |
| Percentage cruising | % | 33.1 | ± | 1.5 | 24.6 | ± | 1.8 | 25.9 | ± | 1.8 | 45.7 | ± | 2.6 | 24.3 | |
| Speed | Average speed | m/s | 10.5 | ± | 0.7 | 6.8 | ± | 0.9 | 7.9 | ± | 0.7 | 16.6 | ± | 1.2 | 8.4 |
| SD speed | m/s | 9.0 | ± | 0.2 | 6.2 | ± | 0.5 | 7.3 | ± | 0.2 | 8.6 | ± | 0.6 | 8.9 | |
| Maximum speed | m/s | 28.6 | ± | 0.5 | 21.9 | ± | 1.0 | 26.5 | ± | 0.6 | 28.5 | ± | 0.5 | 25.9 | |
| Acceleration | Average acceleration | m/s2 | 0.43 | ± | 0.01 | 0.46 | ± | 0.01 | 0.46 | ± | 0.02 | 0.37 | ± | 0.01 | 0.57 |
| Average deceleration | m/s2 | −0.48 | ± | 0.01 | −0.49 | ± | 0.02 | −0.52 | ± | 0.02 | −0.43 | ± | 0.02 | −0.64 | |
| SD acceleration | m/s2 | 0.24 | ± | 0.01 | 0.25 | ± | 0.01 | 0.25 | ± | 0.01 | 0.21 | ± | 0.01 | 0.37 | |
| SD deceleration | m/s2 | 0.35 | ± | 0.02 | 0.35 | ± | 0.01 | 0.39 | ± | 0.02 | 0.31 | ± | 0.02 | 0.40 | |
| Maximum acceleration | m/s2 | 1.51 | ± | 0.07 | 1.37 | ± | 0.08 | 1.41 | ± | 0.06 | 1.31 | ± | 0.08 | 1.96 | |
| Maximum deceleration | m/s2 | −2.29 | ± | 0.15 | −1.96 | ± | 0.10 | −2.13 | ± | 0.14 | −2.05 | ± | 0.16 | −2.07 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huertas, J.I.; Giraldo, M.; Quirama, L.F.; Díaz, J. Driving Cycles Based on Fuel Consumption. Energies 2018, 11, 3064. https://doi.org/10.3390/en11113064
Huertas JI, Giraldo M, Quirama LF, Díaz J. Driving Cycles Based on Fuel Consumption. Energies. 2018; 11(11):3064. https://doi.org/10.3390/en11113064
Chicago/Turabian StyleHuertas, José I., Michael Giraldo, Luis F. Quirama, and Jenny Díaz. 2018. "Driving Cycles Based on Fuel Consumption" Energies 11, no. 11: 3064. https://doi.org/10.3390/en11113064
APA StyleHuertas, J. I., Giraldo, M., Quirama, L. F., & Díaz, J. (2018). Driving Cycles Based on Fuel Consumption. Energies, 11(11), 3064. https://doi.org/10.3390/en11113064