Real-Time Implementation of Robust Control Strategies Based on Sliding Mode Control for Standalone Microgrids Supplying Non-Linear Loads

Abstract
1. Introduction
- (1)
- Standalone microgrid -microgrid configurations with less power converters where SPVA and battery energy storage system are controlled using only one DC-DC buck-boost converter to connect and control the lead acid battery pack.
- (2)
- Using only one PI controller with anti-windup for the outer control loop for DC-link voltage regulation.
- (3)
- Replacing the PI controller by a SMC with boundary layer in the inner control loop for single-phase d-q control strategy, which is proposed for power quality improvement.
- (4)
- Developing a new control strategy based on sliding mode control for DC-DC buck boost converter where the system parameters are taken on consideration in equivalent control.
- (5)
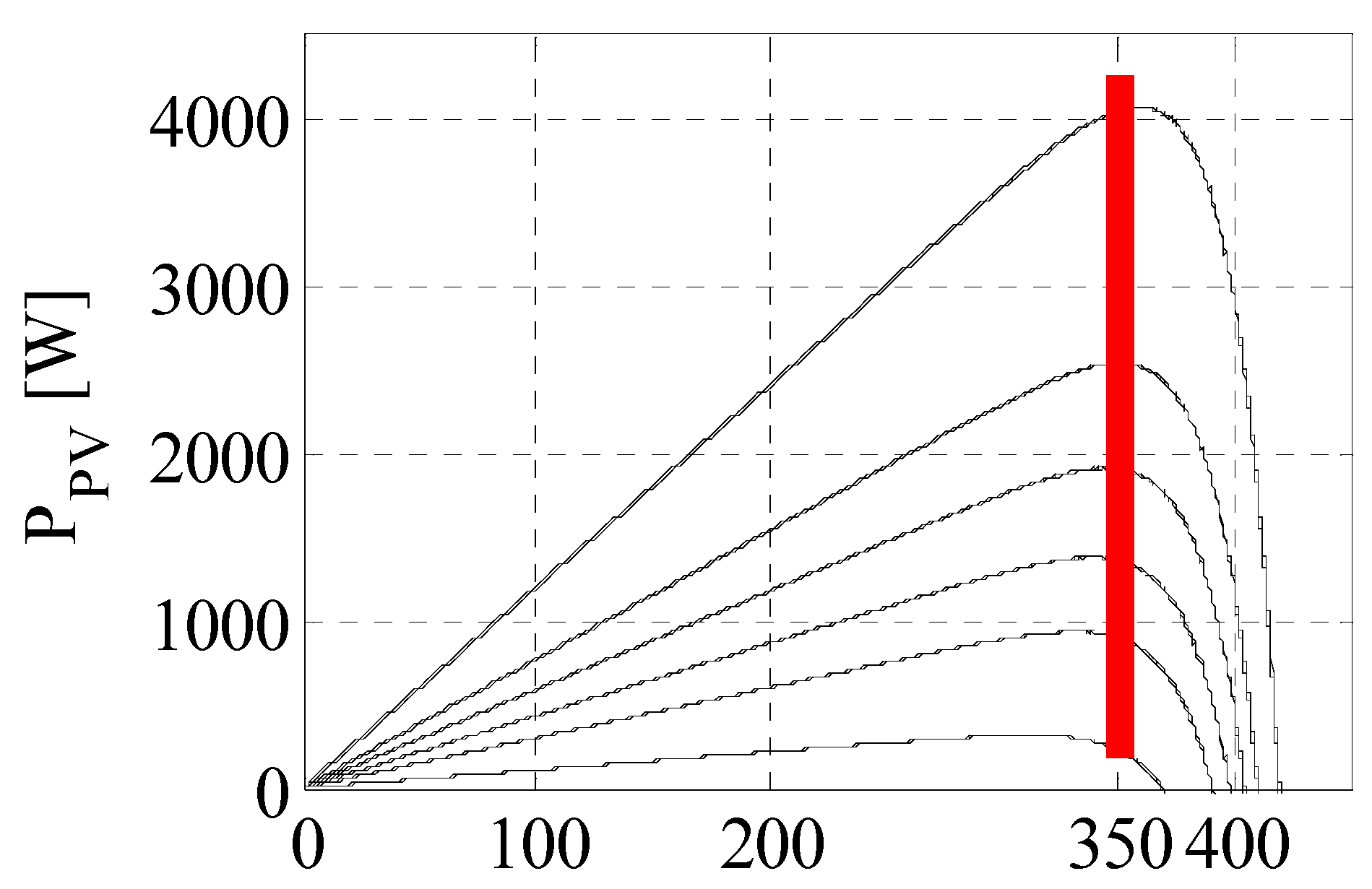
- Achieving maximum power point tracking (MPPT) from SPVA by controlling only the DC link voltage.
- (6)
- Employing the boundary layer in SMC to reduce the chattering phenomena.
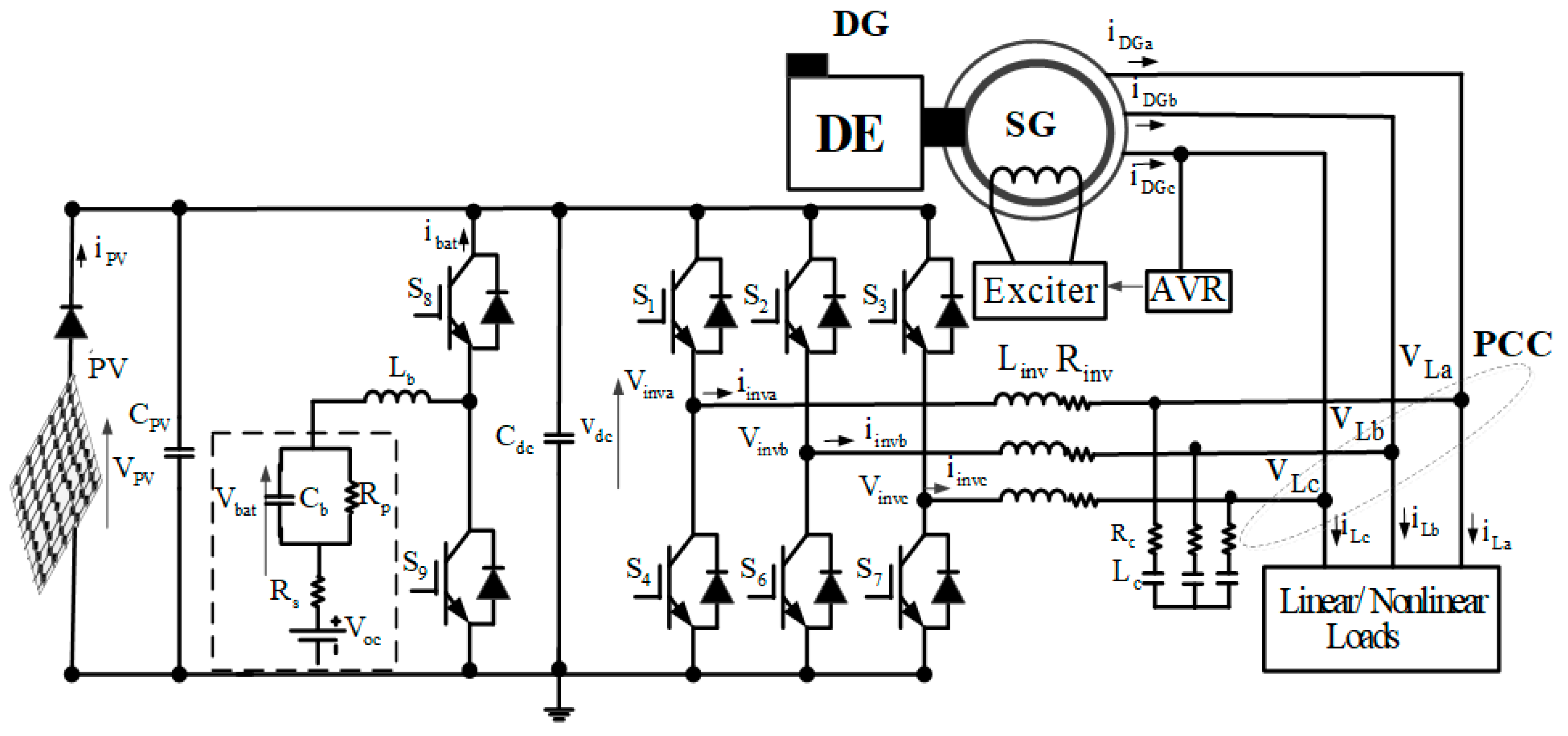
2. System Description and Operation Mode
3. Control System
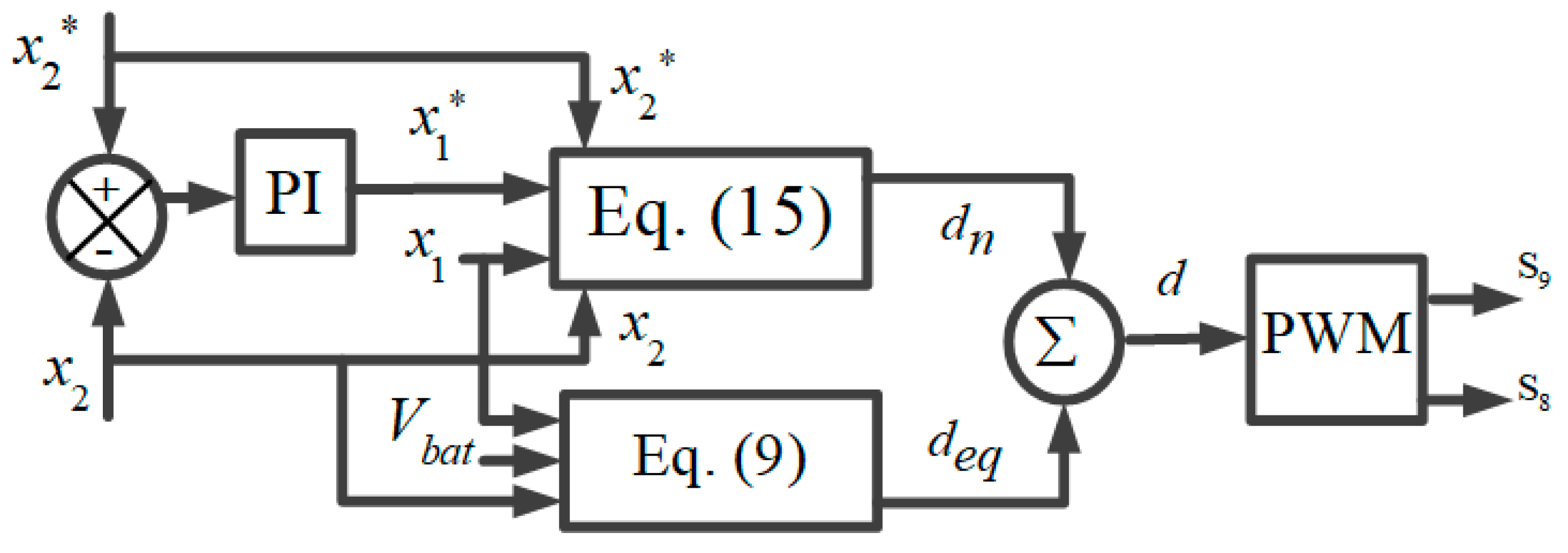
3.1. Control of the DC-DC Buck-Boost Converter
3.1.1. Modeling of the DC-DC Buck-Boost Converter
3.1.2. Sliding Mode Control for the DC-DC Buck-Boost Converter
3.1.3. Selection of the Sliding Surface
3.1.4. Equivalent Control
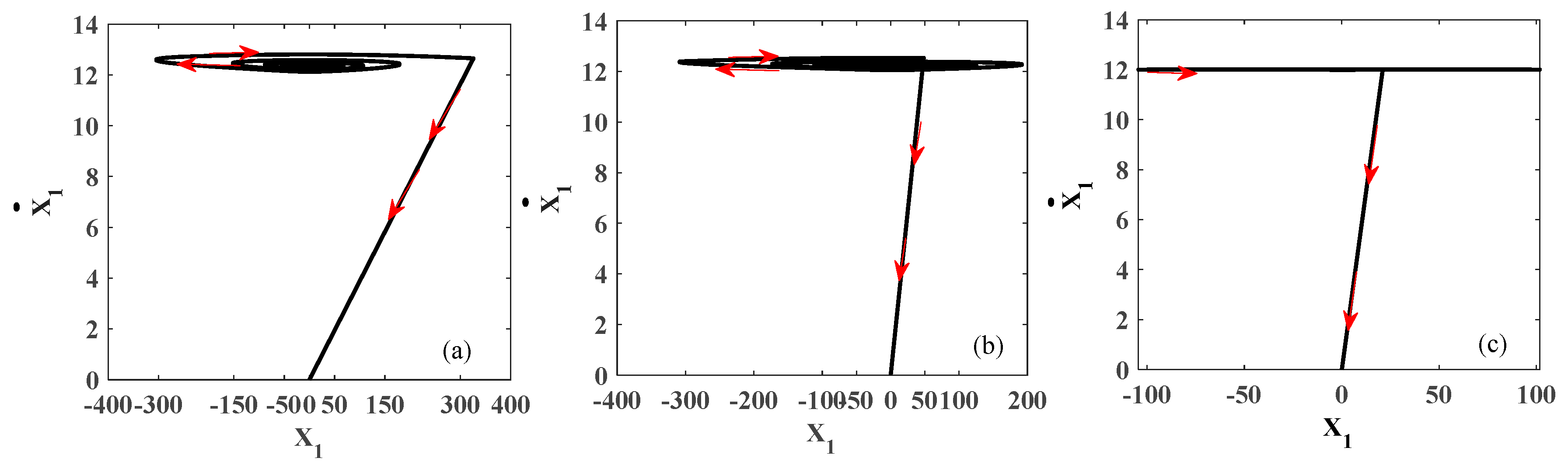
3.1.5. Stability Analysis
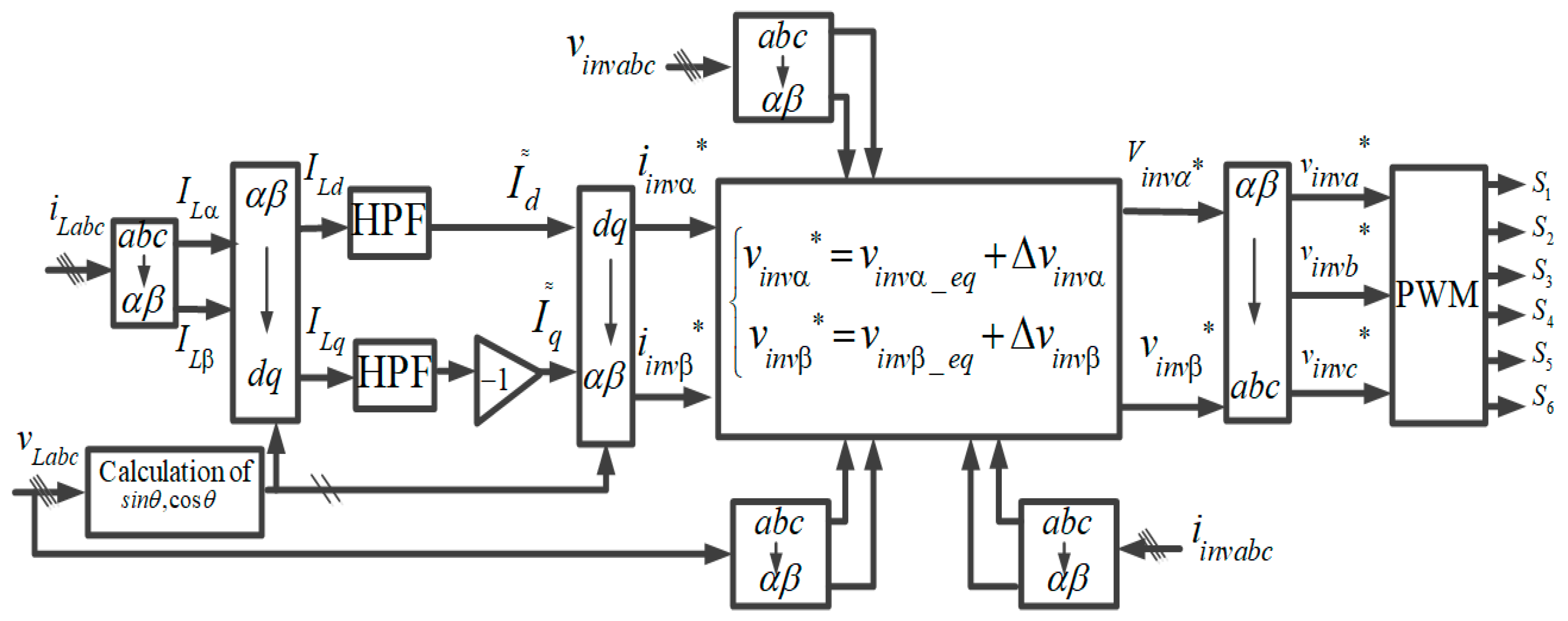
3.2. Control of Three-Phase Voltage Source Converter
3.2.1. Sliding Mode Current Controller
3.2.2. Selecting the Switching Surface
3.2.3. Stability Analysis
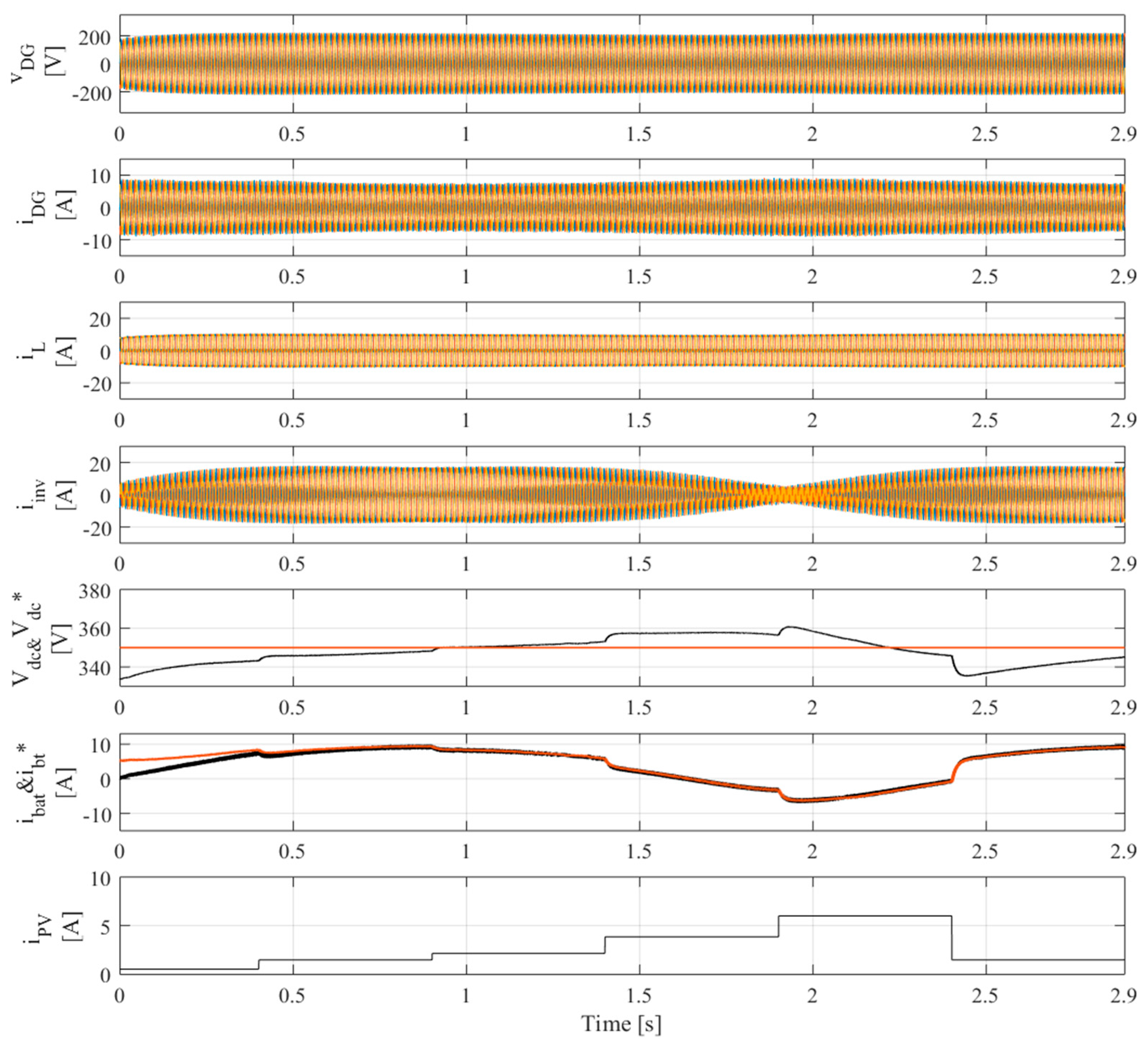
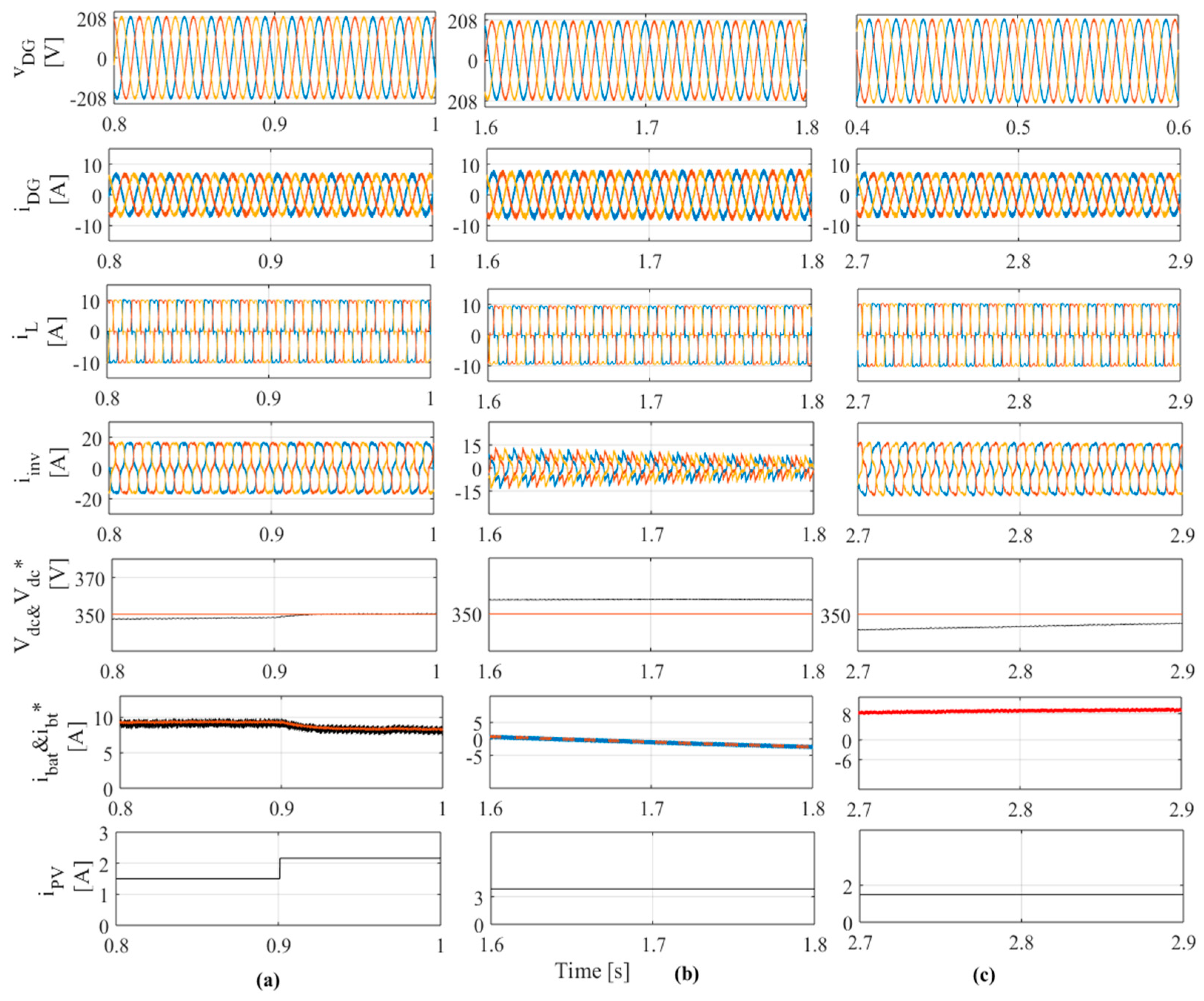
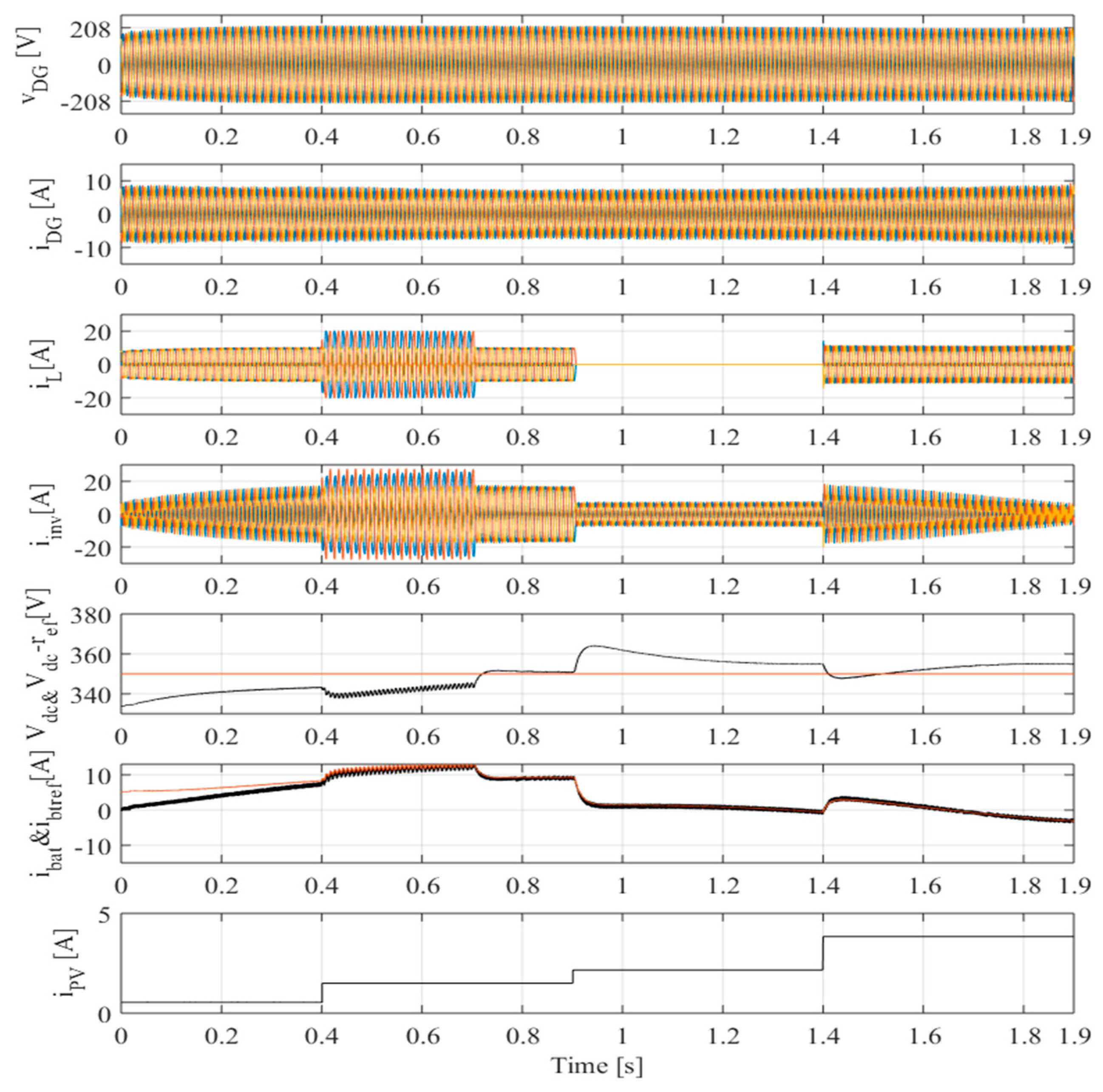
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kaldellis, J.K. Stand-Alone and Hybrid Wind Energy Systems: Technology, Energy Storage and Applications, 1st ed.; Woodhead Publishing: Cambridge, MA, USA, 2010; pp. 7–10. [Google Scholar]
- Sreekumar, P.; Khadkikar, V. Adaptive power management strategy for effective volt–ampere utilization of a photovoltaic generation unit in standalone microgrids. IEEE Trans. Ind. Appl. 2018, 54, 1784–1792. [Google Scholar] [CrossRef]
- Rezkallah, M.; Chandra, A.; Tremblay, M.; Ibrahim, H. Experimental Implementation of an APC with Enhanced MPPT for Standalone Solar Photovoltaic based Water Pumping Station. IEEE Trans. Sustain. Energy 2018. [Google Scholar] [CrossRef]
- Shi, R.; Zhang, X. VSG-Based dynamic frequency support control for autonomous PV–diesel microgrids. Energies 2018, 11, 1814. [Google Scholar] [CrossRef]
- Rezkallah, M.; Singh, S.; Chandra, A.; Saad, M.; Singh, B.; Tremblay, M.; Geng, H. Real-time hardware testing, control and performance analysis of hybrid cost-effective wind-PV-diesel standalone power generation system. In Proceedings of the 2017 IEEE Industry Applications Society Annual Meeting, Cincinnati, OH, USA, 1–5 October 2017; pp. 1–8. [Google Scholar]
- Gan, L.K.; Shek, J.K.; Mueller, M.A. Analysis of Tower Shadow Effects on Battery Lifetime in Standalone Hybrid Wind-Diesel-Battery Systems. IEEE Trans. Ind. Electron. 2017, 64, 6234–6244. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Nguyen-Duc, H.; Nakanishi, Y. Optimal sizing of energy storage devices in wind-diesel systems considering load growth uncertainty. IEEE Trans. Ind. Appl. 2018, 54, 1983–1991. [Google Scholar] [CrossRef]
- Rezkallah, M.; Chandra, A.; Rousse, D.R.; Ibrahim, H.; Ilinca, A.; Ramdenee, D. Control of small-scale wind/diesel/battery hybrid standalone power generation system based on fixed speed generators for remote areas. In Proceedings of the IEEE, IECON 2016, Florence, Italy, 23–26 October 2016; pp. 4060–4065. [Google Scholar]
- Kamal, E.; Aitouche, A.; Oueidat, M. Fuzzy fault-tolerant control of wind-diesel hybrid systems subject to sensor faults. IEEE Trans. Sustain. Energy 2013, 4, 857–866. [Google Scholar] [CrossRef]
- Adefarati, T.; Bansal, R.C.; Justo, J.J. Techno-economic analysis of a PV–wind–battery–diesel standalone power system in a remote area. J. Eng. 2017, 13, 740–744. [Google Scholar] [CrossRef]
- Rezkallah, M.; Hamadi, A.; Chandra, A.; Singh, B. Design and implementation of active power control with improved P&O method for wind-PV-battery-based standalone generation system. IEEE Trans. Ind. Electron. 2018, 65, 5590–5600. [Google Scholar]
- Rezkallah, M.; Chandra, A.; Singh, B.; Singh, S. Microgrid: Configurations, Control and Applications. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Wies, R.W.; Johnson, R.A.; Agrawal, A.N.; Chubb, T.J. Simulink model for economic analysis and environmental impacts of a PV with diesel-battery system for remote villages. IEEE Trans. Power Syst. 2005, 20, 692–700. [Google Scholar] [CrossRef]
- Nejabatkhah, F.; Li, Y.W.; Nassif, A.B.; Kang, T. Optimal design and operation of a remote hybrid microgrid. CPSS Trans. Power Electron. Appl. 2018, 3, 3–13. [Google Scholar] [CrossRef]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. An adaptive droop control scheme for DC microgrids integrating sliding mode voltage and current controlled boost converters. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Yazici, İ.; Yaylaci, E.K. Fast and robust voltage control of DC–DC boost converter by using fast terminal sliding mode controller. IET Power Electron. 2016, 9, 120–125. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Jiang, W.; Chan, C.Y. An improved PWM-based sliding-mode controller for a DC-DC cascade boost converter. IEEE Trans. Circ. Syst. II Express Br. 2017. [Google Scholar] [CrossRef]
- Singh, B.; Chandra, A.; Al-Haddad, K. Power Quality: Problems and Mitigation Techniques; John Wiley & Sons: Hoboken, NJ, USA, 2014; pp. 2–10. [Google Scholar]
- Dong, H.; Yuan, S.; Han, Z.; Ding, X.; Ma, S.; Hana, X. A Comprehensive strategy for power quality improvement of multi-inverter-based microgrid with mixed loads. IEEE Access 2018, 6, 30903–30916. [Google Scholar] [CrossRef]
- Ko, H.S.; Jang, M.S.; Ryu, K.S.; Kim, D.J.; Kim, B.K. Supervisory Power Quality Control Scheme for a Grid-Off Microgrid. IEEE Trans. Sustain. Energy 2018, 9, 1003–1010. [Google Scholar] [CrossRef]
- Kesler, M.; Ozdemir, E. Synchronous-reference-frame-based control method for UPQC under unbalanced and distorted load conditions. IEEE Trans. Ind. Electron. 2011, 58, 3967–3975. [Google Scholar] [CrossRef]
- García, P.; García, C.A.; Fernández, L.M.; Llorens, F.; Jurado, F. ANFIS-based control of a grid-connected hybrid system integrating renewable energies, hydrogen and batteries. IEEE Trans. Ind. Inform. 2014, 10, 1107–1117. [Google Scholar] [CrossRef]
- Seifi, K.; Moallem, M. An adaptive PR controller for synchronizing grid-connected inverters. IEEE Trans. Ind. Electron. 2018. [Google Scholar] [CrossRef]
- Wang, T.; Fei, J. Adaptive neural control of active power filter using fuzzy sliding mode controller. IEEE Access 2016, 4, 6816–6822. [Google Scholar] [CrossRef]
- Fei, J.; Chu, Y.; Hou, S. A backstepping neural global sliding mode control using fuzzy approximator for three-phase active power filter. IEEE Access 2017, 5, 16021–16032. [Google Scholar] [CrossRef]
- Cao, D.; Fei, J. Adaptive fractional fuzzy sliding mode control for three-phase active power filter. IEEE Access 2016, 4, 6645–6651. [Google Scholar] [CrossRef]
- Guzman, R.; de Vicuña, L.G.; Morales, J.; Castilla, M.; Miret, J. Model-based control for a three-phase shunt active power filter. IEEE Trans. Ind. Electron. 2016, 63, 3998–4007. [Google Scholar] [CrossRef]
- Tsai, J.F.; Chen, Y.P. Sliding mode control and stability analysis of buck DC-DC converter. Int. J. Electron. 2007, 94, 209–222. [Google Scholar] [CrossRef]
- Reitz, M.A.; Wang, X. Robust Sliding Mode Control of Buck-Boost DC-DC Converters. In Proceedings of the ASME 2016 Dynamic Systems and Control Conference, MN, USA, 12–14 October 2016. [Google Scholar]
- Guldemir, H. Modeling and sliding mode control of DC-DC buck-boost converter. In Proceedings of the 6th International Advanced Technologies Symposium (IATS’11), Elazığ, Turkey, 16–18 May 2011; pp. 475–480. [Google Scholar]
- Slotine, J.J.; Li, W. Applied nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; pp. 105–116. [Google Scholar]
- Gavagsaz-Ghoachani, R.; Phattanasak, M.; Martin, J.P.; Pierfederici, S.; Nahid-Mobarakeh, B.; Riedinger, P. A lyapunov function for switching command of a DC–DC power converter with an LC input filter. IEEE Trans. Ind. Appl. 2017, 53, 5041–5050. [Google Scholar] [CrossRef]
- Rezkallah, M.; Sharma, S.K.; Chandra, A.; Singh, B.; Rousse, D.R. Lyapunov function and sliding mode control approach for the solar-PV grid interface system. IEEE Trans. Ind. Electron. 2017, 64, 785–795. [Google Scholar] [CrossRef]
- Rezkallah, M.; Hamadi, A.; Chandra, A.; Singh, B. Real-time HIL implementation of sliding mode control for standalone system based on PV array without using dumpload. IEEE Trans. Sustain. Energy. 2015, 6, 1389–1398. [Google Scholar] [CrossRef]
- Wai, R.J.; Shih, L.C. Design of voltage tracking control for DC–DC boost converter via total sliding-mode technique. IEEE Trans. Ind. Electron. 2011, 58, 2502–2511. [Google Scholar] [CrossRef]
- Saghafinia, A.; Ping, H.W.; Uddin, M.N. Fuzzy sliding mode control based on boundary layer theory for chattering-free and robust induction motor drive. Int. J. Adv. Manuf. Technol. 2014, 71, 57–68. [Google Scholar] [CrossRef]
- Wang, W.J.; Chen, J.Y. A new sliding mode position controller with adaptive load torque estimator for an induction motor. IEEE Trans. Energy Convers. 1999, 14, 413–418. [Google Scholar] [CrossRef]
- Boum, A.T.; Djidjio Keubeng, G.B.; Bitjoka, L. Sliding mode control of a three-phase parallel active filter based on a two-level voltage converter. Syst. Sci. Control Eng. 2017, 5, 535–543. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 208 V | , , | 0.1, 25 | |
| 60 Hz | VSC | 10 kHz | |
| 350 V | 1000 µF | ||
| 100 µF | 5 mH | ||
| 1.5 mH | 0.01 Ω | ||
| DC-DC Converter | 10 kHz | 5 Ω | |
| 0.001, 0.8 and 5 | 10 µF |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benhalima, S.; Miloud, R.; Chandra, A. Real-Time Implementation of Robust Control Strategies Based on Sliding Mode Control for Standalone Microgrids Supplying Non-Linear Loads. Energies 2018, 11, 2590. https://doi.org/10.3390/en11102590
Benhalima S, Miloud R, Chandra A. Real-Time Implementation of Robust Control Strategies Based on Sliding Mode Control for Standalone Microgrids Supplying Non-Linear Loads. Energies. 2018; 11(10):2590. https://doi.org/10.3390/en11102590
Chicago/Turabian StyleBenhalima, Seghir, Rezkallah Miloud, and Ambrish Chandra. 2018. "Real-Time Implementation of Robust Control Strategies Based on Sliding Mode Control for Standalone Microgrids Supplying Non-Linear Loads" Energies 11, no. 10: 2590. https://doi.org/10.3390/en11102590
APA StyleBenhalima, S., Miloud, R., & Chandra, A. (2018). Real-Time Implementation of Robust Control Strategies Based on Sliding Mode Control for Standalone Microgrids Supplying Non-Linear Loads. Energies, 11(10), 2590. https://doi.org/10.3390/en11102590