1. Introduction
Harmonic resonance, which is always accompanied with heavy current and high voltage [
1], is a main power quality issue in power grids. It may cause abnormal operation or even damage of power facilities [
2,
3,
4,
5,
6], and further threatens normal and safe operation of power systems. Therefore, intense research to prevent and suppress harmonic resonance is needed.
Harmonic resonance is essentially the singularity of harmonic network admittance matrix [
7,
8,
9]. In smart grid, harmonic resonance is becoming increasingly more complex due to the following reasons. Firstly, the operating statuses of renewable energy generations, controlled loads in fundamental frequency domain, may vary due to environmental factors, scheduling instructions and different time periods. Further, the equivalent admittances/impedances of some parallel reactive compensating equipment, such as static var compensators (SVCs), are continuous adjustable. Therefore, the parameters of equivalent harmonic admittance/impedance of the above components may be variable, and it may further change the elements and eigenvalues of harmonic network admittance matrix. Secondly, the typology of power grid may change frequently to guarantee the requirements of economic or security dispatch. It will change harmonic network admittance matrix as well. Therefore, it is highly significant to implement the research of rapid online evaluation of parameter feasible domain (PFD) for each typology to guide the adjustment or restriction of the equivalent structure parameters of network.
To obtain PFD, the method based upon harmonic resonance mode analysis (HRMA) technique [
7,
8,
9] and pointwise precise eigenvalue computations is doable. Concretely, via pointwise traversal, PFD can be derived by checking whether there is an eigenvalue equaling or approaching zero for each step. However, as the shape of PFD is unknown in advance, the pointwise step should be small enough to ensure accuracy. As a consequence, the method will be time-consuming for many times of precise eigenvalue computations. Moreover, the above shortage will be more obvious with the growth of system scale and variable parameter number. Therefore, the above method is only viable for offline analysis of PFD.
By estimating the distribution range of eigenvalues using matrix elements, a new way to evaluate PFD may be possible without precise eigenvalue computations. In the research works of control engineering area, eigenvalue estimation is used to derive the sufficient condition of the stability of dynamic system in accordance with Lyapunov stability theory and Gersgorin theorem [
10,
11,
12,
13,
14,
15]. Further, the above thought is applied to study the small-disturbance stability of distribution systems with a high proportion of distributed generations in [
16]. Via the basic Gersgorin theorem, the sufficient condition is derived that all the estimated discs should locate in the left-half complex plane. However, applicability and conservation of the method lack in-depth analysis. Based on the thought of eigenvalue estimation, Gersgorin theorem is introduced in this paper to research PFD to ensure the prevention of harmonic resonance. In detail, the following three main issues will be studied in-depth.
- (1)
Establishment of the PFD to keep away from harmonic resonance based on Gersgorin discs.
- (2)
The necessity of the extended Gersgorin theorem.
- (3)
Strategy to reduce the conservation of the obtained PFD.
A novel method on the basis of the estimation of eigenvalues is proposed to rapidly evaluate PFD to prevent harmonic resonance in this paper. By analyzing the singularity of harmonic network admittance matrix, the sufficient condition to prevent harmonic resonance is derived via the extended Gersgorin theorem. Specifically, each estimated disc should neither include nor approach the origin of the complex plane. Further, due to the non-uniqueness of similar transformation matrix (STM), a strategy is proposed to determine the appropriate STM to minimize the conservation of the obtained PFD.
The remainder of the paper is structured as follows. Analyses of mathematical essence of harmonic resonance are put forward in
Section 2. Extended Gersgorin theorem-based sufficient condition to prevent harmonic resonance is derived in
Section 3. Determination strategy of STM is proposed to obtain PFD with less conservation in
Section 4. Availability and advantages of the method are demonstrated in
Section 5 through four different scale systems. Eventually, concluding remarks are summarized in
Section 6.
2. Mathematical Essence of Harmonic Resonance
Firstly, the mathematical essence of harmonic resonance is summarized via HRMA. Details are illustrated as follows.
According to [
7], the following formula can be established for a power network.
where
Yf is the network admittance matrix at frequency
f;
If is the vector of nodal current injection,
Vf is the vector of nodal voltage. For simplifying notation, the subscript
f is omitted hereinafter.
Via decomposition of
Y, the following (2) and (3) can be derived.
where
is the diagonal eigenvalue matrix of
Y;
U is defined as the vector of modal voltage;
J is defined as the vector of modal current.
In above (3), if λi is equal to or close to 0, tends toward infinity. As a consequence, even a small Ji will result in a large Ui.
Therefore, once there exists an eigenvalue equaling or approaching 0, namely the origin of the complex plane, Y will be singular or nearly singular. This is the mathematical essence of harmonic resonance.
In other words, if there is no eigenvalue of Y locating at or approaching the origin of the complex plane, harmonic resonance can be prevented. This is the starting point of the method proposed in this paper.
From the perspective of avoiding the origin and its nearby area of the complex plane, the sufficient condition to prevent harmonic resonance is derived based on the thought of eigenvalue estimation rather than pointwise precise computations in the next section.
3. Extended Gersgorin Theorem-Based Sufficient Condition to Prevent Harmonic Resonance
As the high-dimensional nonlinear relationship between eigenvalues and matrix elements, it is difficult to establish exact explicit expression of each eigenvalue composed of matrix elements. Instead, explicit expression of the distribution of eigenvalues with matrix elements is built up in this section through the extended Gersgorin theorem. To prevent harmonic resonance caused by singularity of Y, the sufficient condition that matrix elements should meet is further derived. On this basis, PFD of equivalent admittance parameters is deduced. Detailed illustrations are as follows.
3.1. Study of Matrix Singularity via the Basic Gersgorin Theorem
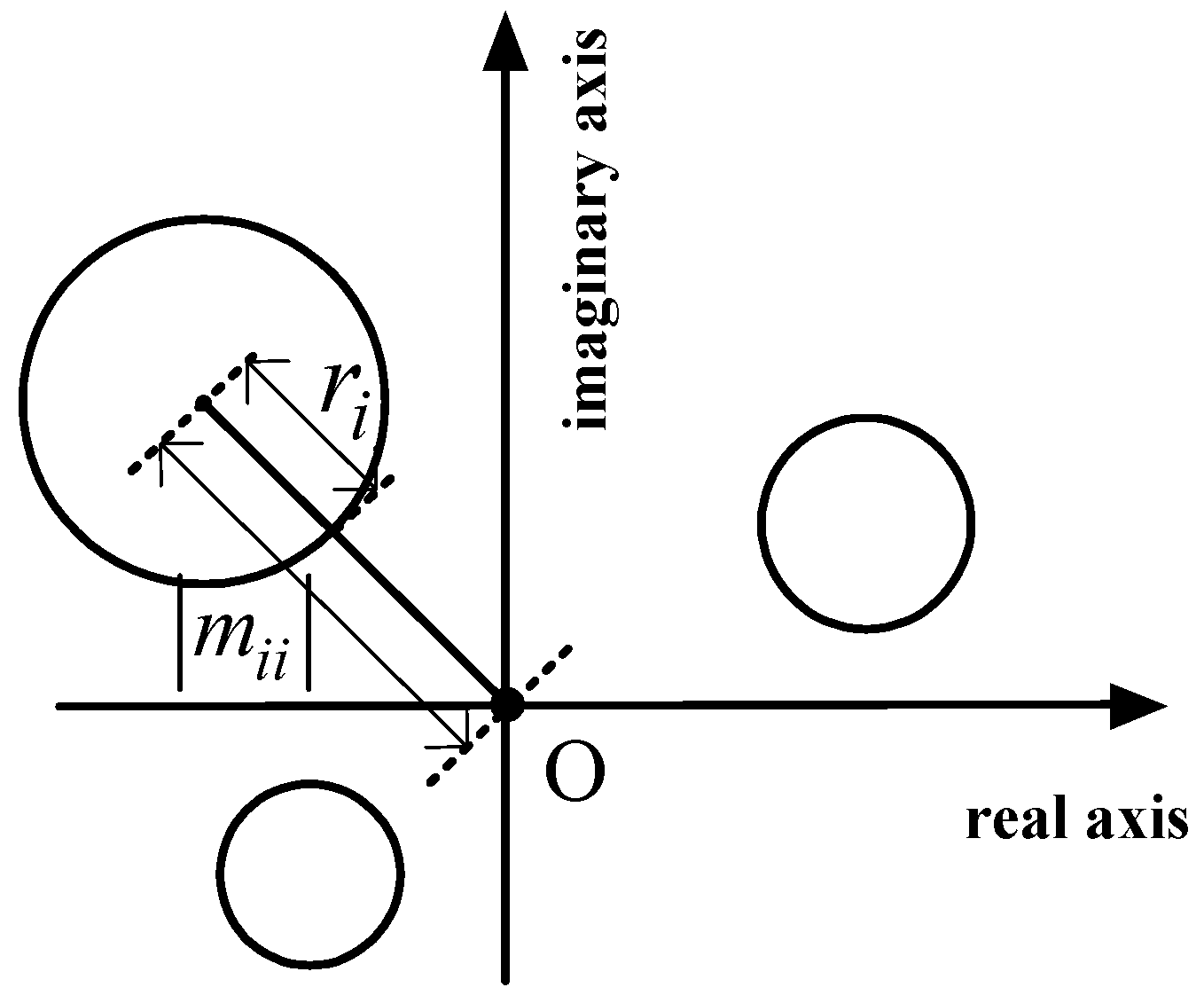
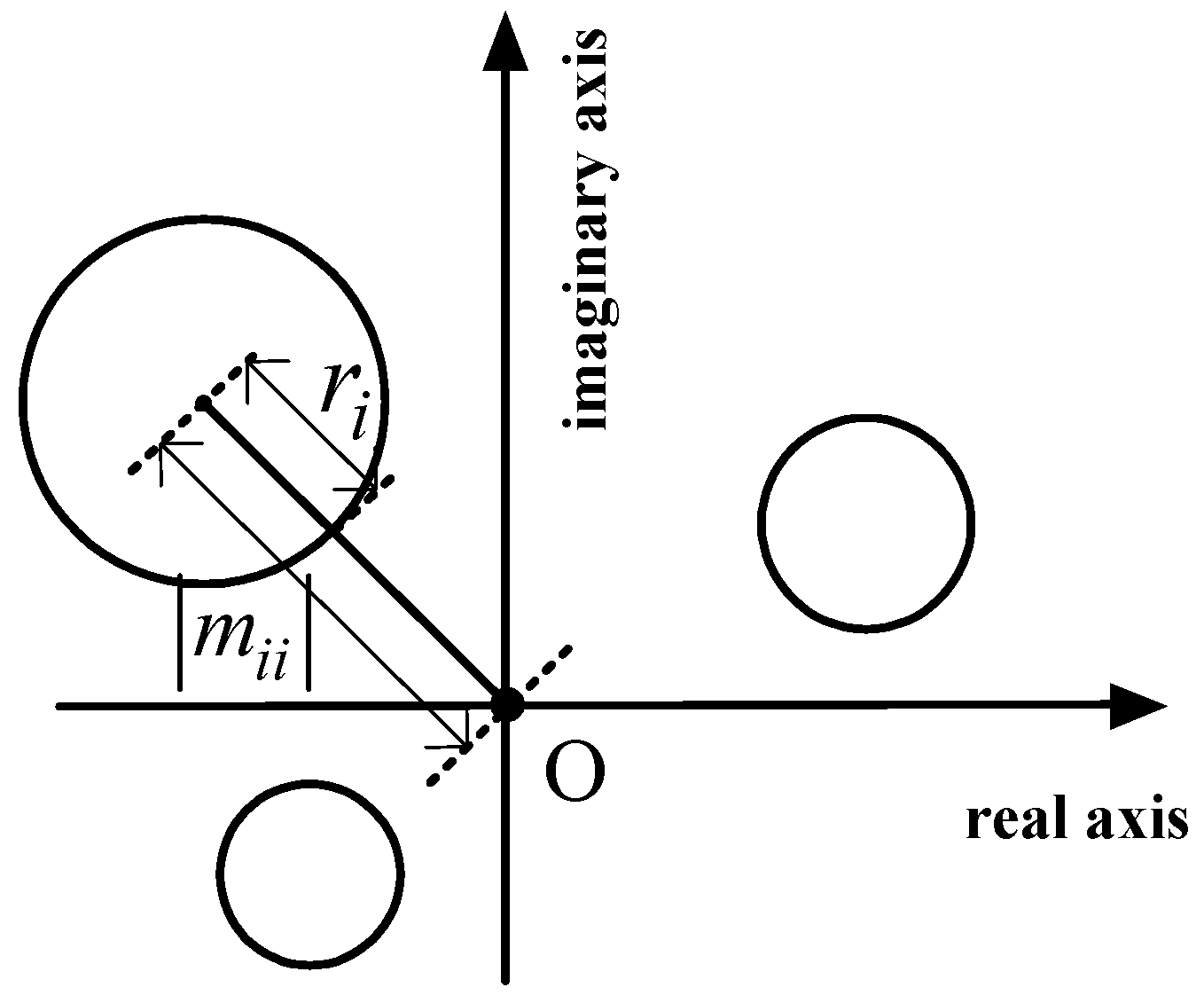
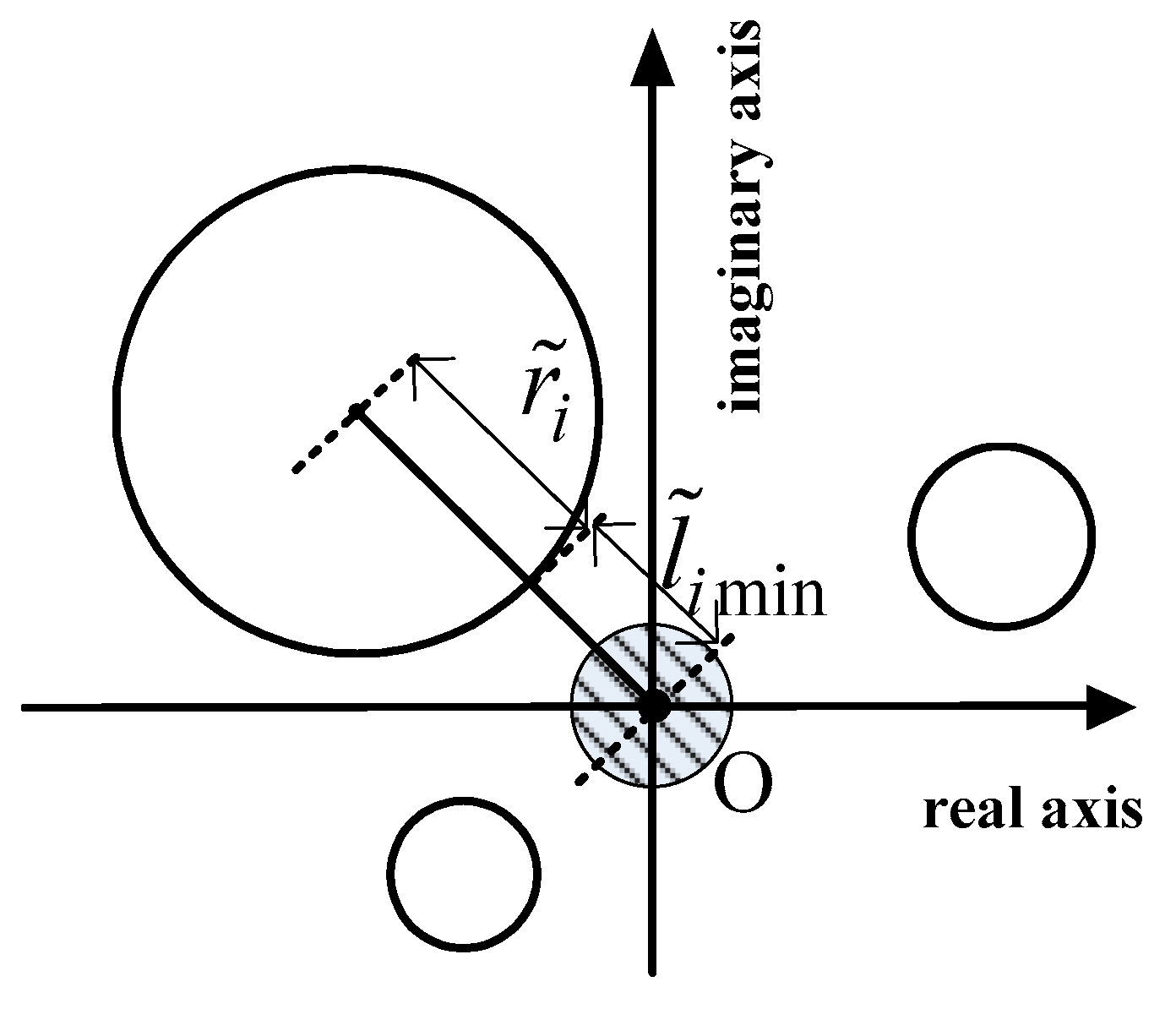
Theorem 1 (Gersgorin theorem [14,17,18]). Let M be a complex n × n matrix with entries mij, then each eigenvalue λ of matrix M locates in the union of n discs. As shown in
Figure 1, each disc is called a Gersgorin disc of
M.
O is the origin. For disc
i,
mii represents the centre; |
mii| represents the distance from the centre to
O;
ri represents the radius of the disc.
According to Equation (4) and
Figure 1,
limin = (|
mii| −
ri) is the closest distance from disc
i to
O. And, conclusions can be derived as follows.
- (1)
If limin ≤ 0, then the origin O is absolutely included in disc i;
- (2)
Otherwise, if limin > 0, then the origin O can be completely excluded from disc i.
Consequently, if limin > 0 can be satisfied for each disc, each disc does not contain the origin O. That is, the origin O can be excluded from the union of all the discs. It means each eigenvalue of M cannot locate at O, and the singular of matrix M can be avoided. For Y, it represents the prevention of harmonic resonance can be realized.
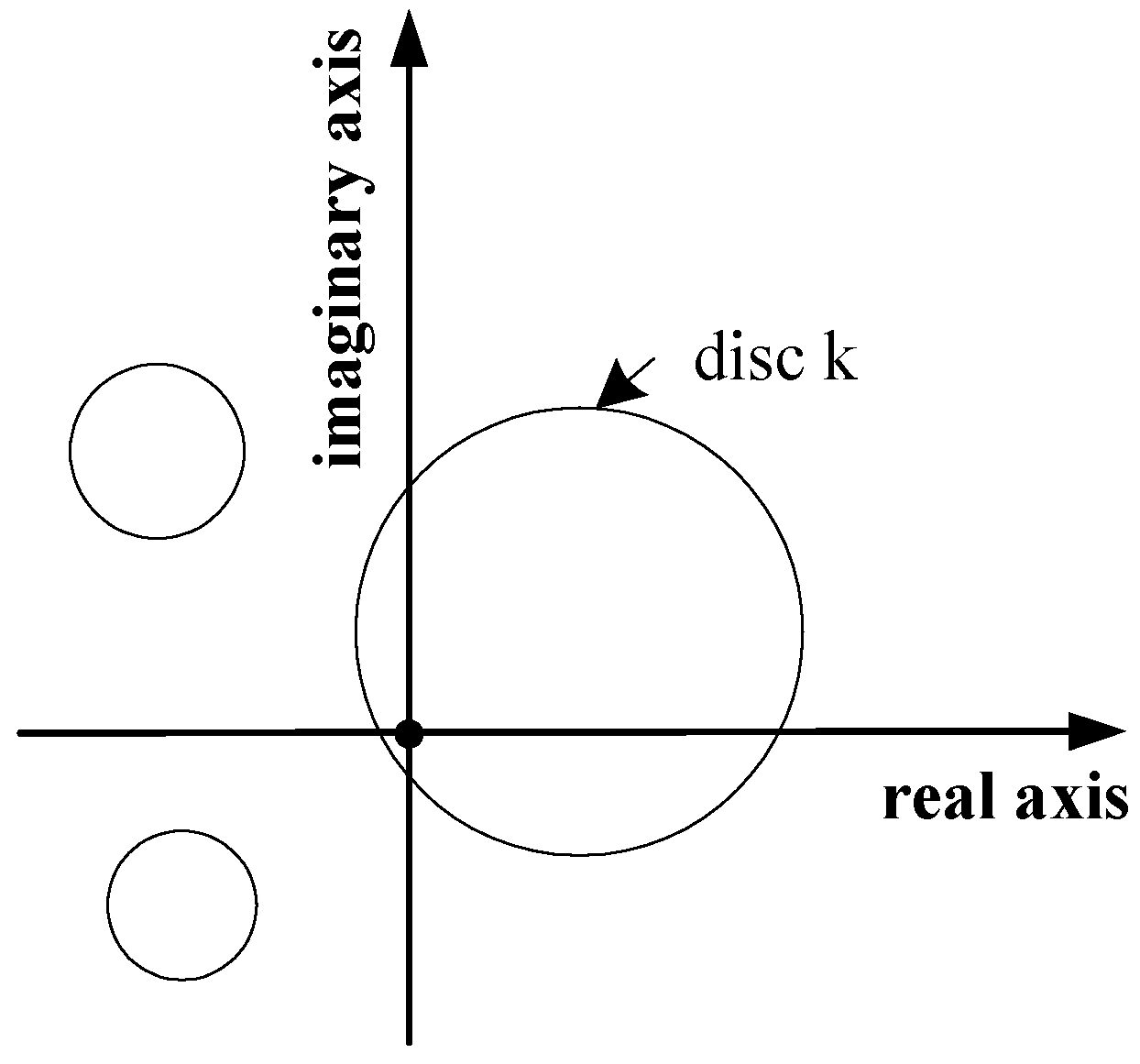
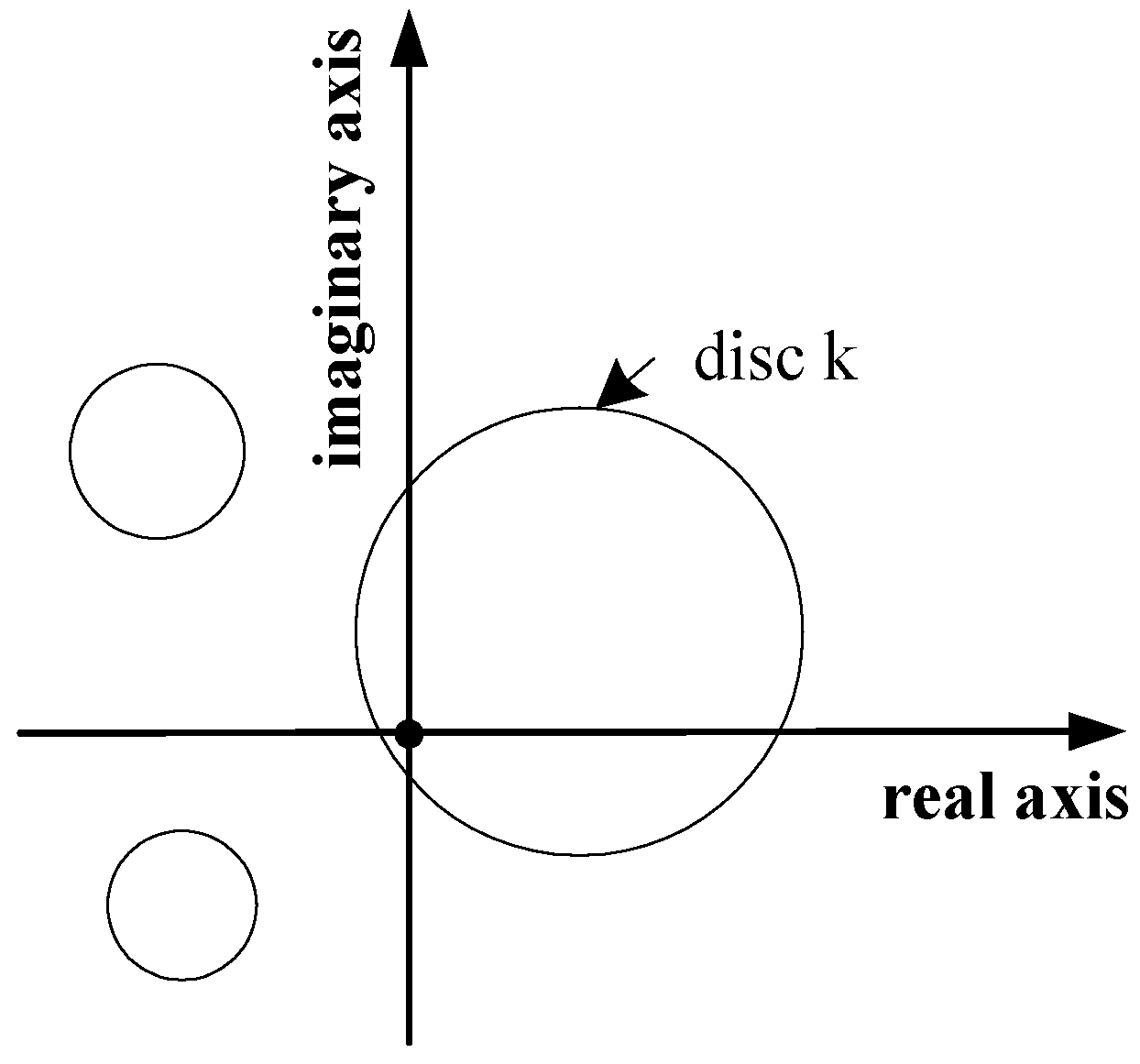
However, for the bus with light load or without loads, the following (5) can be established.
where
ykk and
ykj are the diagonal element and off-diagonal element of
Y, respectively.
Further, according to the operational laws of vector modules, the following (6) may be established.
According to the above analysis of (4), Equation (6) means
lkmin ≤ 0. That is, the origin
O cannot be excluded from disc
k, which is surrounded by the solid line as shown in
Figure 2.
Therefore, the prevention of harmonic resonance cannot be guaranteed regardless of the values of the other matrix elements. It means that PFD, which can prevent harmonic resonance, is nonexistent.
The above conclusion is unreasonable in general. Therefore, the basic Gersgorin theorem, namely Formula (4), is not sufficient for evaluating PFD. The three-bus benchmark in
Section 5 can intuitively verify the above analysis.
3.2. Study of Matrix Singularity Analysis via the Extended Gersgorin Theorem
To estimate eigenvalues more flexibly, the following Theorem 2, namely the extended Gersgorin theorem, can be further derived via matrix similarity transform (MST).
Theorem 2 [17]. For matrix M = [mij] and n positive real numbers (s1, s2, …, sn), then the matrix = S−1MS, in which S = diag (s1, s2, …, sn), is similar to M. According to the property that similar matrices have the same eigenvalues, each eigenvalue λ of M satisfies the following Formula (7). For Theorem 2, defining
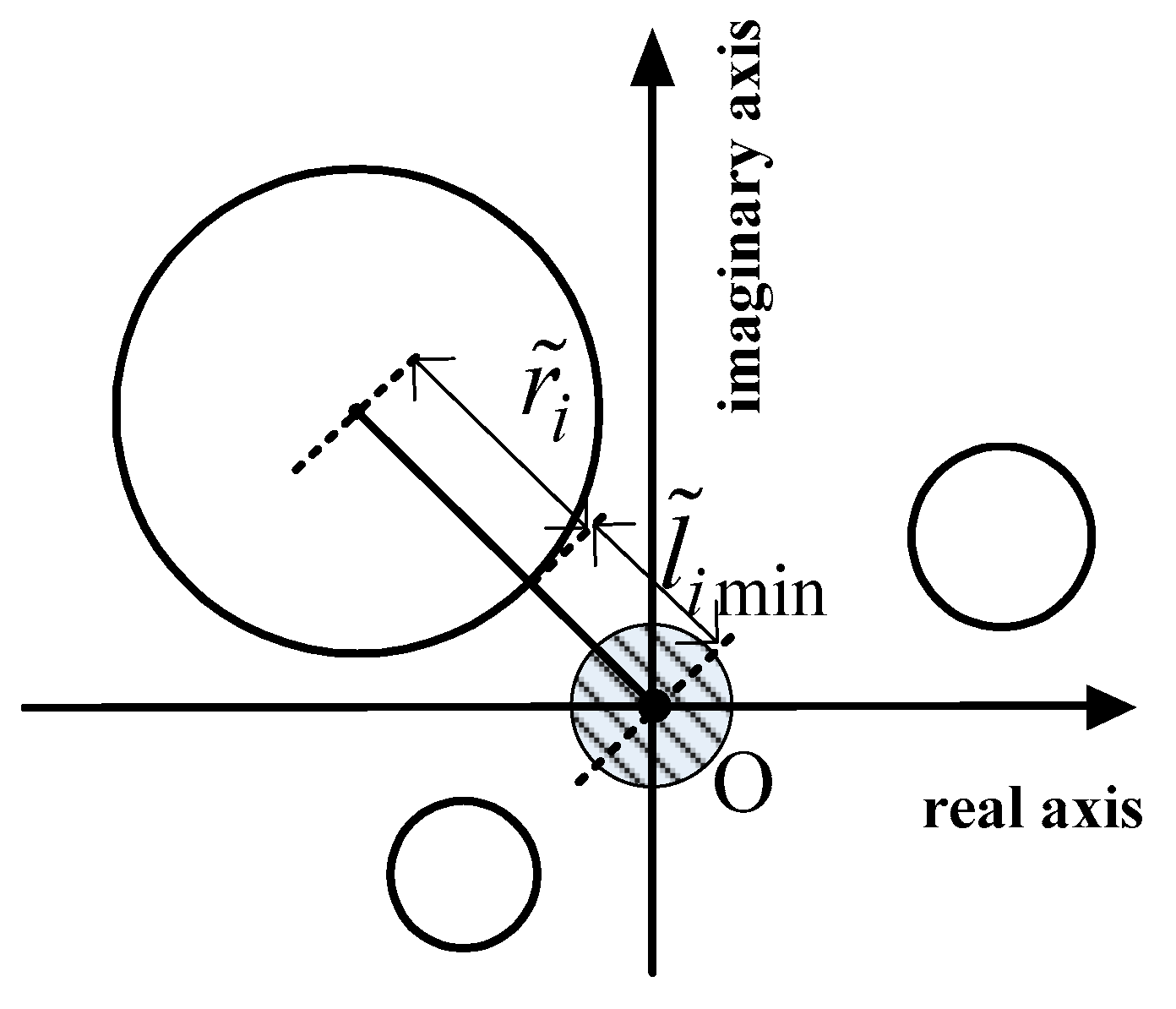
ŕi and
ĺimin as follows.
Through comparing Equation (8) with Equation (4), it can be seen that:
- (1)
For disc i in Theorem 2, the centre mii and |mii| remain the same as Theorem 1.
- (2)
While the radius ŕi is decided by similar transformation matrix (STM) S, namely (s1, s2, …, sn). That is, ŕi can be adjusted flexibly with different (s1, s2, …, sn). As a consequence, ĺimin, which is the closest distance between disc i and the origin O in Theorem 2, can be adjusted flexibly.
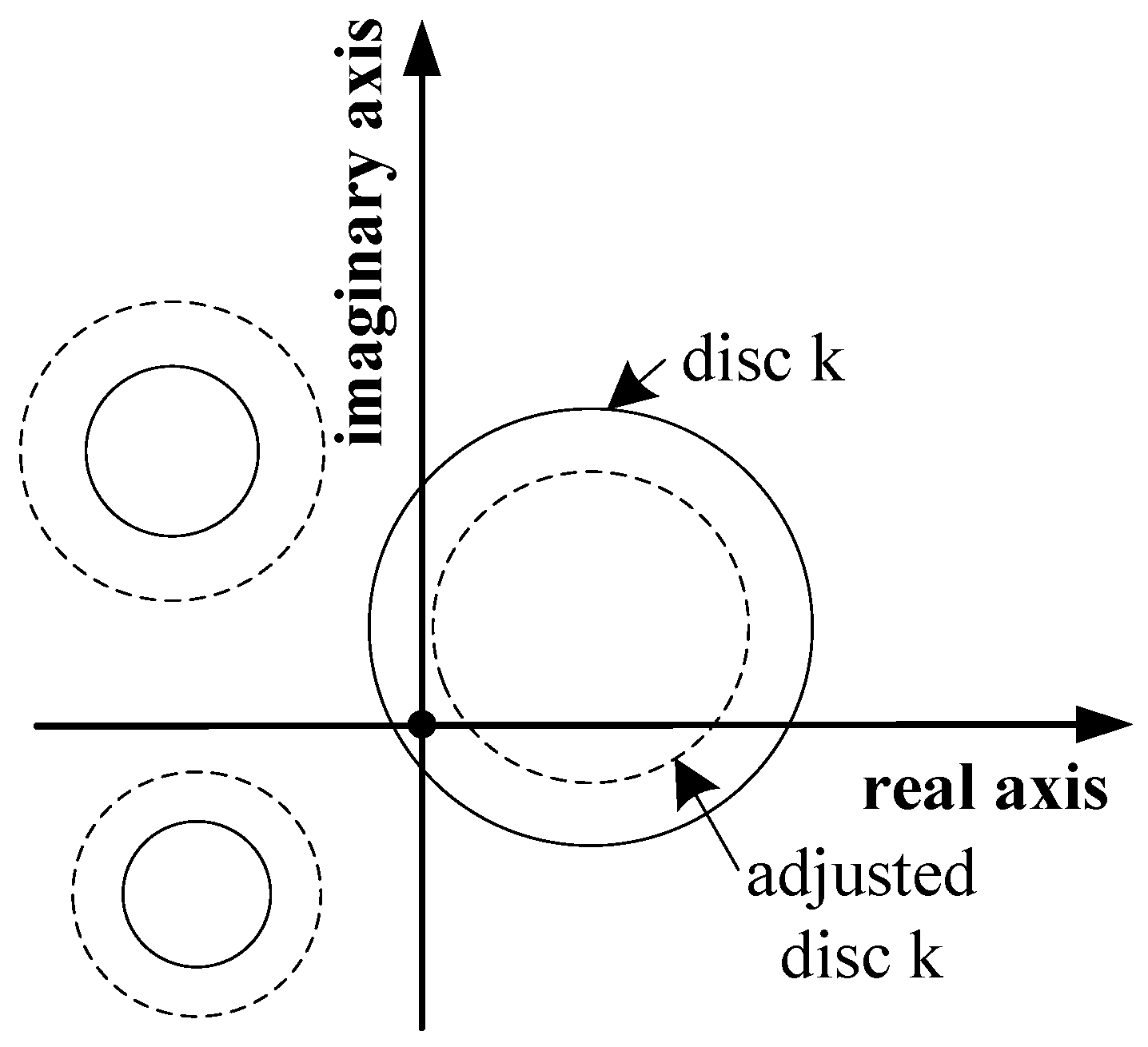
Therefore, as shown in
Figure 3, the adjusted disc
k may exclude the origin
O with appropriate
S. Namely, the following Equation (9) may be established with appropriate (
s1,
s2, …,
sn) for Equation (5).
Further, if ĺimin > 0 can be satisfied for each disc with the appropriate (s1, s2, …, sn), each disc does not contain the origin O. For Y, it means the matrix is non-singular and prevention of harmonic resonance is realized.
3.3. Sufficient Condition to Prevent Harmonic Resonance
According to the above analysis via the extended Gersgorin theorem, the sufficient condition to prevent harmonic resonance for
Y can be deduced as follows.
Not just strictly singular, the more common form of
Y is nearly singular when harmonic resonance occurs. Therefore, Equation (10) can be modified as the following Equation (11) with a small positive real number
ε.
As shown in
Figure 4, Equation (11) means that each estimated disc of
Y should evade the shadow disc, whose centre is the origin
O and radius is
ε, to prevent harmonic resonance.
In this paper, the research objects are equivalent admittance parameters, which are denoted as
= (
b1,
b2, …,
bn), subject to fixed network topology. Also, to realize harmonic resonance prevention, the general sufficient condition is the following Equation (12) for
Y with
.
More specifically, the above Equation (12) can be further written as the following form.
where
c1 represents the discs related to
;
c2 is composed of the discs, which are irrelevant to
.
According to Equation (13), once the
n positive numbers (
s1,
s2, …,
sn) are determined,
ŕi can be calculated. And, PFD of
can be obtained from Equation (14) as follows.
In the next section, the way to determine (s1, s2, …, sn) is illustrated in detail.
4. Determination of the Optimal STM
From the above Equation (14), it can be seen that PFD of is directly affected by ŕi, which is determined by (s1, s2, …, sn). Moreover, STM of a matrix is non-unique. It means that the obtained PFD can have more than one form. Therefore, the core issue to be discussed is the way to determine the optimal (s1, s2, …, sn) to minimize the conservation of the obtained PFD.
Details are illustrated as follows.
4.1. Conservation Analysis
For illustration purposes, Equation (13) is translated into the following form.
From Equation (15), the following conclusions can be deduced.
- (1)
For disc
,
> (
ŕi +
ε) should be met. As shown in
Figure 4, the smaller the radius
ŕi is, the smaller area that
should avoid in the complex plane. It means that, the larger feasible domain of
yii(
), namely, the larger feasible domain of
. To sum up, the smaller the radius
ŕi, the less conservation of the obtained PFD.
- (2)
Disc i (i ∈ c2) can be expressed as a linear constraint of (s1, s2, …, sn), in which |yii| and |yij|are constant.
Therefore, to choose the optimal (s1, s2, …, sn) to guarantee the PFD of has minimum conservation, the optimization model illustrated in part 2 of this section, can be established.
4.2. The Optimization Model for Choosing the Optimal STM
In this model, the optimization variables are (s1, s2, …, sn).
Specifically, the aim is to minimize the objective function (16).
In addition, the constraints are as follows.
For the above linear constrained non-linear optimization model, it can be solved easily by sequential quadratic programming (SQP).
By substituting the optimal solution (
s1op,
s2op, …,
snop) into Equation (14), the optimal PFD of
can be obtained as Equation (18).
5. Case Studies
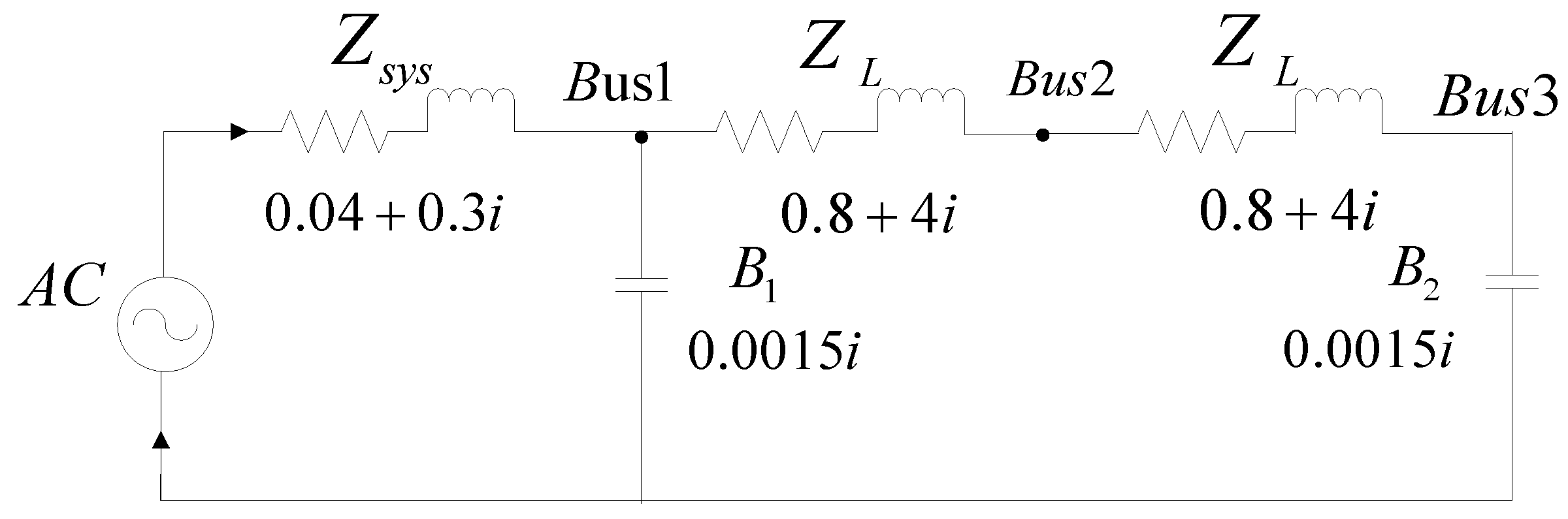
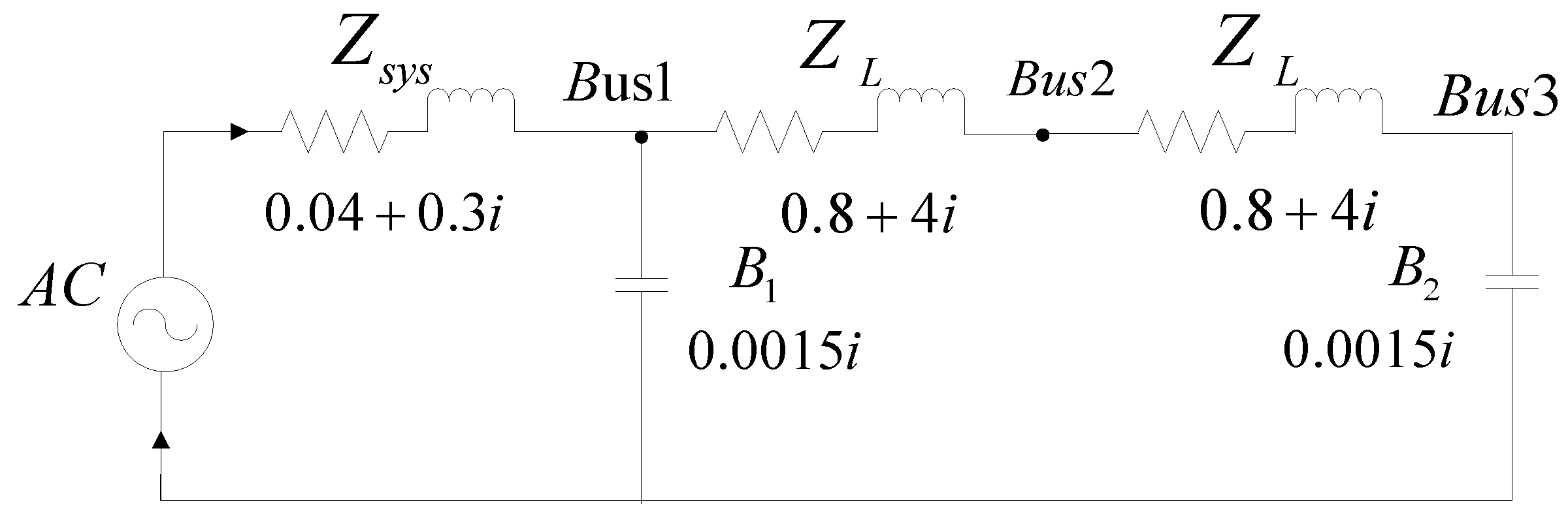
Availability and superiorities of the method in this paper are verified through four different scale systems. Concretely, a 3-bus benchmark [
5] as shown in
Figure 5, and a modified 9-bus benchmark, a modified 27-bus benchmark and a modified 81-bus benchmark, which are based on the proposed universal benchmark illustrated in part 2 of this section.
The 3-bus benchmark is used to demonstrate the analysis and computation processes of the proposed method clearly, and the other three benchmarks are used to analyze the effects of system scale and variable parameter number on the computation efficiency and conservation of the proposed method.
5.1. PFD of the 3-Bus Benchmark
The values of the parameters in
Figure 5 are the impedances and admittances under the fundamental frequency
f1, respectively.
f = 9
f1 is selected as the frequency to be analyzed. Also, a continuous adjustable component whose equivalent admittance parameter under
f is
bf ∈ [−0.1, 0.1], is assumed to be installed on bus 3.
To prevent harmonic resonance at frequency
f, PFD of
bf is to be sought. As the basis, the harmonic network admittance matrix
Yf is obtained as in Equation (19) below.
where
i is
.
5.1.1. Analysis Based on Pointwise Precise Eigenvalue Computation (Method 1)
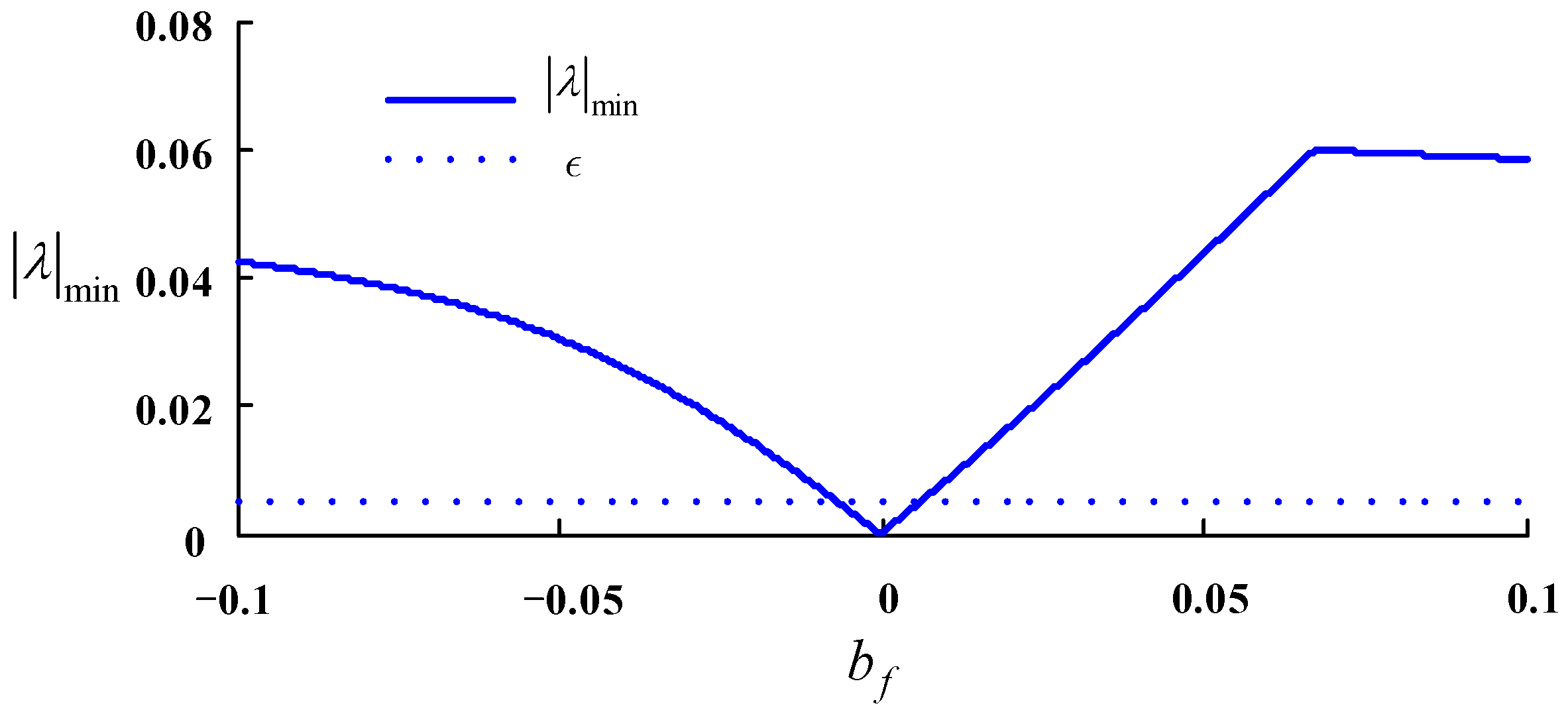
As the first step, the method based on pointwise precise eigenvalue computation, namely Method 1, is carried out, to sweep the whole variation range of bf.
Specifically, according to the values in
Figure 5 and Equation (19), the pointwise step is set as 0.0001. Using Method 1, the change of the minimum module of eigenvalues, entitled as |
λ|
min, with
bf can be obtained as the solid line shown in
Figure 6. Time consumption of the above pointwise process is 0.0239 s. All the results of this paper are obtained by a PC, whose CPU is i7-4790@3.60 GHZ and RAM is 8 G, and the software environment is Windows 10 Professional and MATLAB R2010b. All the data of time consumption in
Section 5 is the average for more than 10 times running of the methods.
From
Figure 6, it can be seen that |
λ|
min is about between 0.02 and 0.05 for most regions of
bf. And, when |
λ|
min is under 0.005, it is very close to zero, which indicates the occurrence of harmonic resonance. Therefore, for Equation (19),
ε is set as 0.005, and the PFD can be obtained as
bf ∈ [−0.1, −0.0066]∪[0.0060, 0.1], by the principle that |
λ|
min should be greater than
ε (as the dotted line in
Figure 6).
Further, the methods using eigenvalue estimation are carried out.
5.1.2. Analysis Based on Basic Gersgorin Theorem
On one hand, the basic Gersgorin theorem is used. From Equation (19), the following Equation (20) can be obtained.
According to the analysis of the basic Gersgorin theorem in
Section 3.1, Equation (21) means
l2min ≤ 0. Therefore, the origin
O cannot be excluded from disc 2. It means that the prevention of harmonic resonance cannot be guaranteed regardless of the
bf value. That is, PFD is nonexistent.
Compared with bf ∈ [−0.1, −0.0066]∪[0.0060, 0.1], which is obtained by Method 1, the above conclusion is obviously unreasonable. Therefore, it verifies that the basic Gersgorin theorem is not sufficient for analyzing PFD.
5.1.3. Analysis Based on the extended Gersgorin Theorem (Method 2)
On the other hand, the proposed method based on the extended Gersgorin theorem, namely Method 2, is carried out. Concrete implement processes are as follows.
According to Equation (11) in
Section 3, prevention of harmonic resonance can be realized if the following Equation (22) is satisfied.
As the dotted line in
Figure 6,
ε equals to 0.005 to keep
Yf away from singular. Hence, the optimization model (23) can be established in accordance with Equations (16) and (17) in
Section 4.
For the above linear constrained non-linear optimization model, SQP is used to solve it. The optimal result is
s1op = 0.0690,
s2op = 0.9417,
s3op = 1.6416. Time consumption of the above optimization process is 0.0047 s. Eventually, PFD of
bf can be obtained through the following (24) in accordance with Equation (18).
In addition, the result is derived as bf ∈ [−0.1, −0.0066)∪(0.0352, 0.1].
More important, PFD of bf on the condition that s2/s3 is greater than the above minimum value of 0.5736 is calculated for comparison. Set s2/s3 as 0.7, bf ∈ [−0.1, −0.0102)∪(0.0388, 0.1] can be obtained. It can be seen that [−0.1, −0.0102) and (0.0388, 0.1] are the subsets of [−0.1, −0.0066) and (0.0352, 0.1], respectively. It shows that the conservation of PFD can be reduced via optimization of STM.
5.1.4. Comparisons of the Methods
From the above results, the proposed Method 2 shows good applicability. For illustration purposes, detailed results of the two methods are listed in
Table 1 below.
By comparing the results in
Table 1, conclusions are deduced as follows.
- (1)
In the view of time consumption, Method 2 is much less than Method 1. Concretely, time consumptions of Method 1 and Method 2 are 0.0239 s and 0.0047 s, respectively. The rapidity of the proposed method is realized by avoiding time-consuming pointwise precise eigenvalue computations via estimation of eigenvalues.
- (2)
In the view of the range of obtained PFD, the result of Method 2 is the subset of the result of Method 1. Though the PFD of the proposed method is conservative, it covers most of the region of the PFD of Method 1. Concretely, [−0.1, −0.0066) and [−0.1, −0.0066] are almost the same, while (0.0352, 0.1] is the subset of [0.0060, 0.1]. Conservation of the proposed method is inevitable, as the derived condition is not the necessary and sufficient condition.
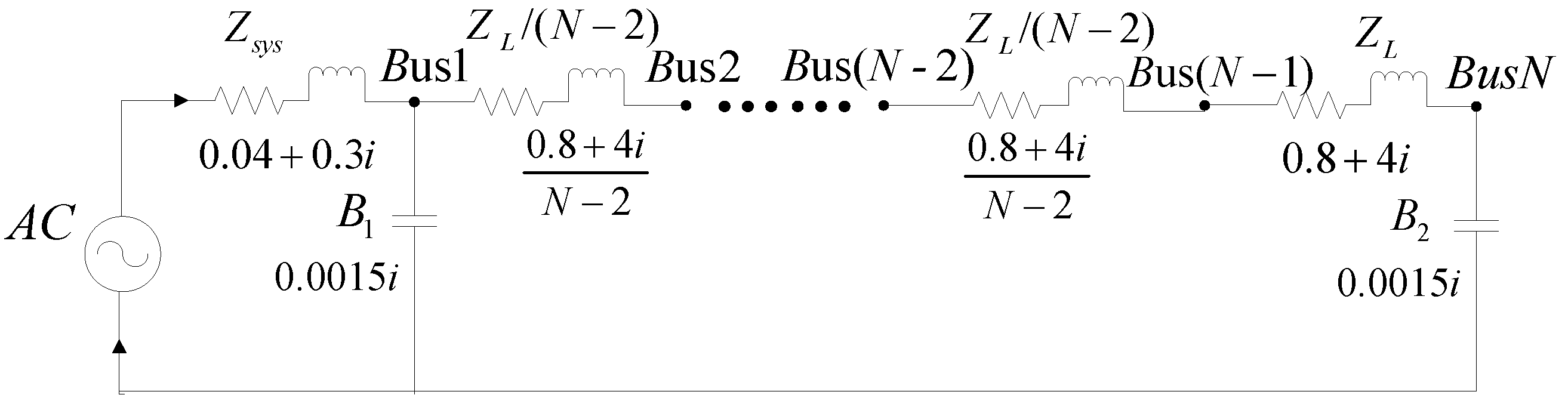
5.2. Effects of System Scale on Time Consumption and Conservation
From the existing analyses in this paper, it can be seen that the self-admittance of the bus with
bf affects the result of PFD. To analyze the effects of bus number on conservatism and time consumption of the proposed method, the universal benchmark as shown in
Figure 7 is designed according to control variable method based on the 3-bus benchmark of
Figure 5. For the universal benchmark, Y
f(
N,
N) is constant. The same continuous adjustable component, whose equivalent admittance parameter under
f is
bf ∈ [−0.1, 0.1], is assumed to be installed on bus
N.
Also, for convenience of consistent evaluation of the range of PFD, ε equals the value of |λ|min under bf = −0.0066 for the universal N-bus benchmark.
For
N equals to 9, 27, 81, Method 1 and Method 2 are carried out, respectively. Pointwise steps are all set as 0.0001. Detailed results are listed in
Table 2 and
Table 3 below.
In the view of time consumption, the following conclusions are deduced from
Table 1,
Table 2 and
Table 3.
- (1)
When bus number increases, time consumptions of Method 1 and Method 2 are both increased.
- (2)
Compared with Method 1, time consumption of the proposed Method 2 increases much more slowly.
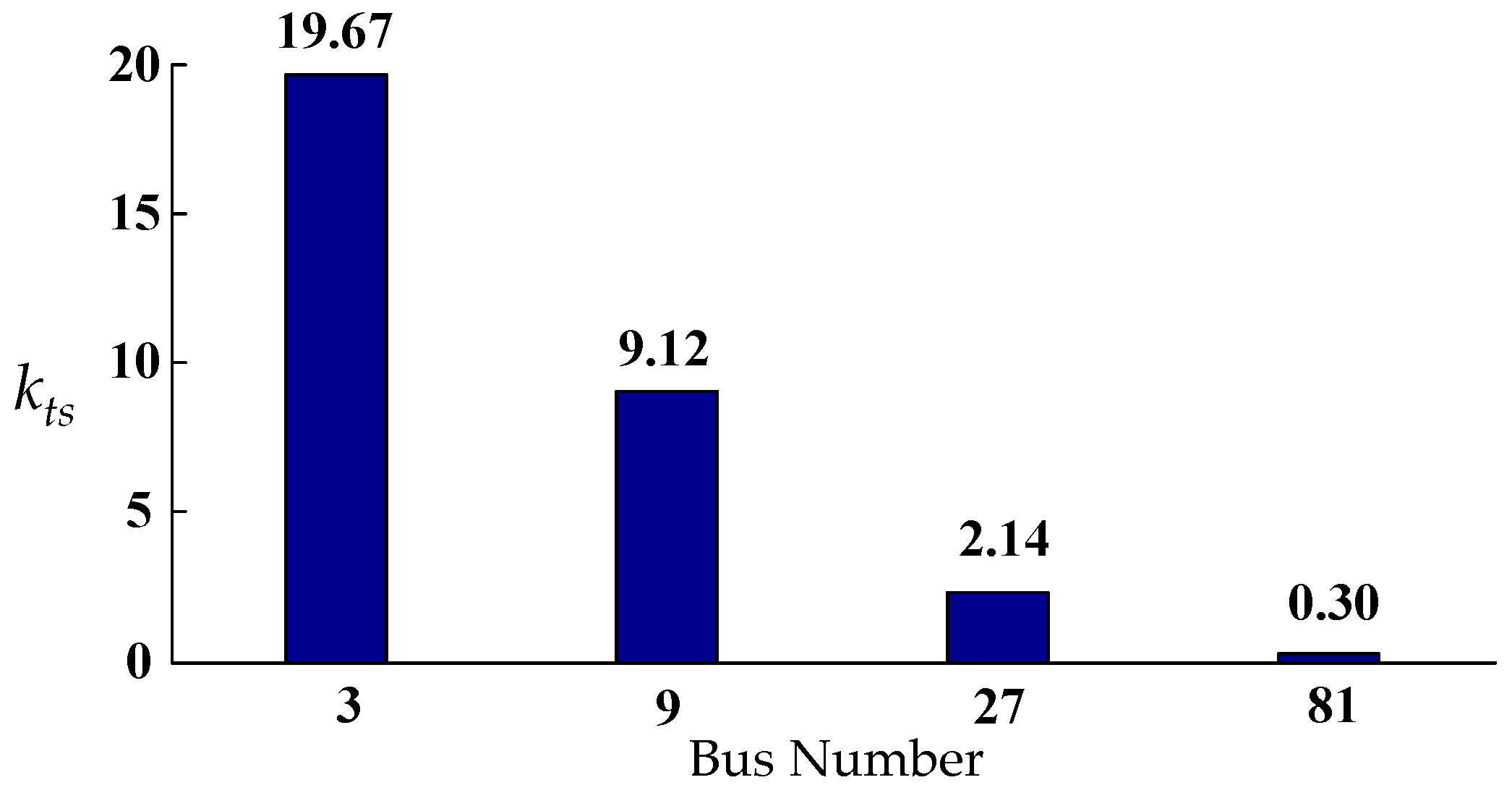
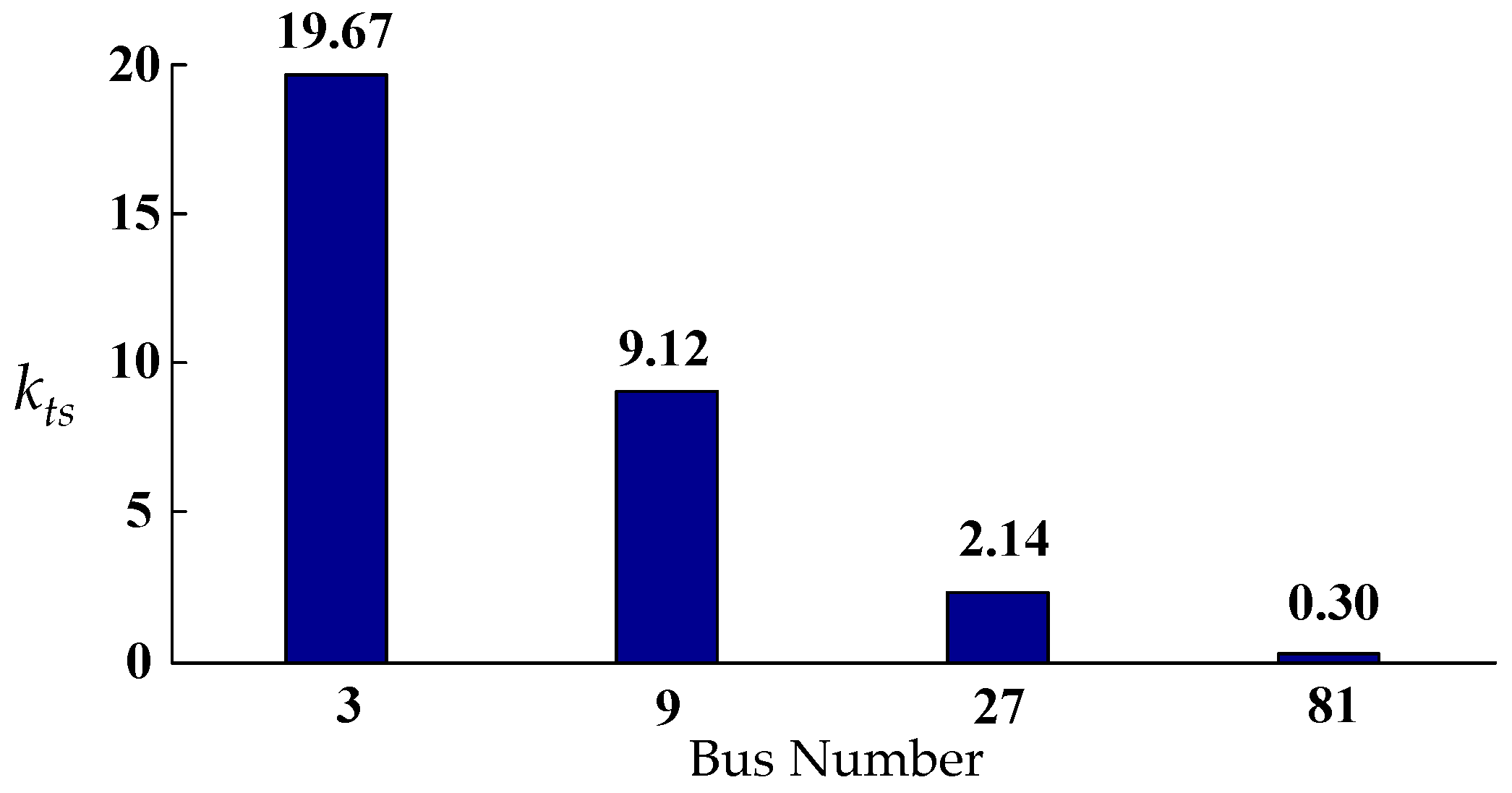
For quantitative comparison, an index of time consumption ratio is defined as
kts.
where
tm1 and
tm2 are the time consumptions of Method 1 and Method 2, respectively. From
Table 1,
Table 2 and
Table 3, the change of
kts corresponding to the change of bus number is shown in
Figure 8.
As shown in
Figure 8,
kts shows a trend of quick decrease with the enlargement of system scale. When the bus numbers are 3, 9, 27 and 81,
kts are 19.67%, 9.12%, 2.14% and 0.30%, respectively.
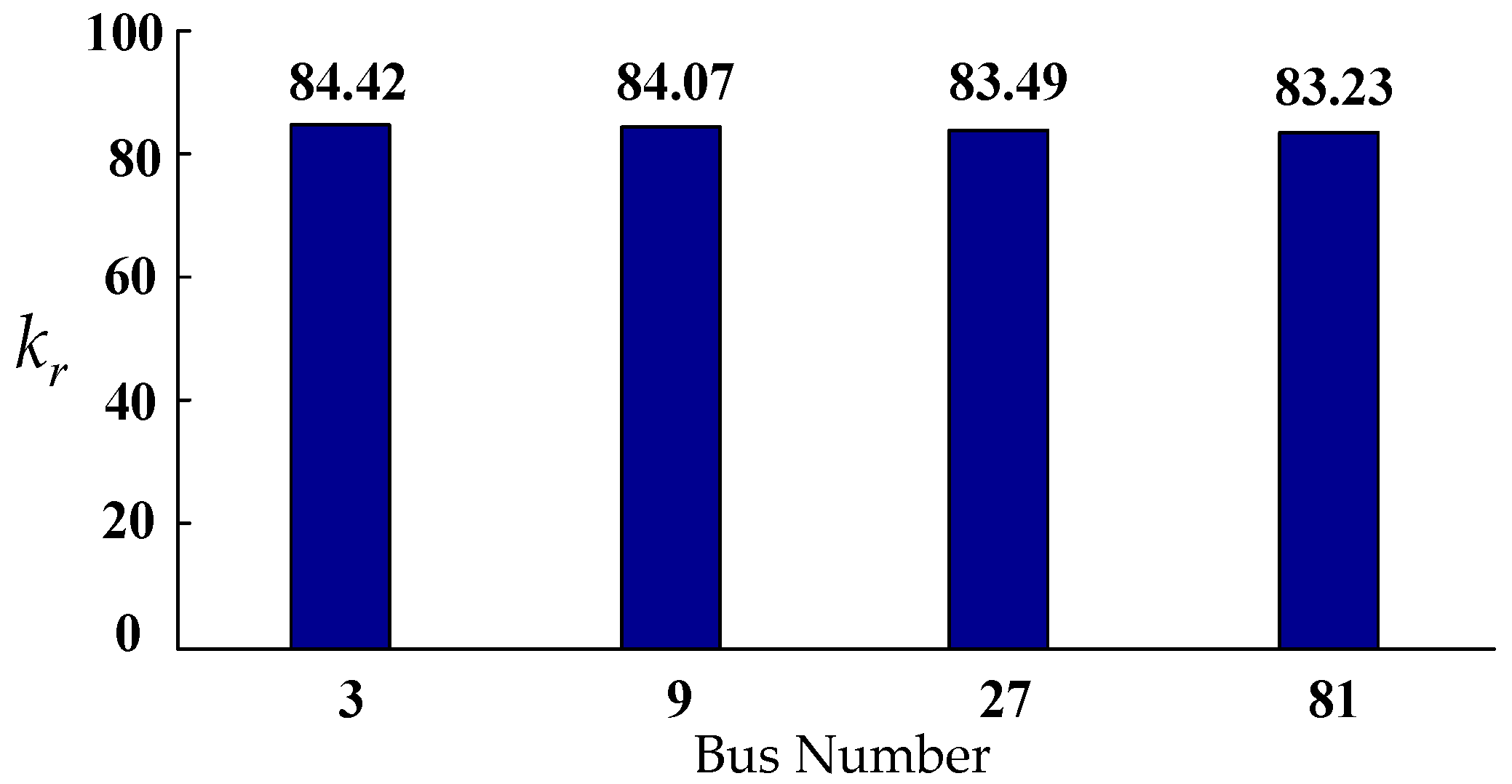
When bus number increases, the conservation of the proposed method increases very slightly.
Similarly, the following index of covering-ratio
kr is defined for quantitative comparison.
where
rm1 and
rm2 are the widths of obtained PFD via Method 1 and Method 2, respectively. From
Table 1,
Table 2 and
Table 3, the change of
kr corresponding to the change of bus number is shown in
Figure 9.
As shown in
Figure 9,
kr shows a trend of very light decrease with the enlargement of system scale. That is, the conservation of the proposed method increased very slightly. When the bus numbers are 3, 9, 27 and 81,
kr are 84.42%, 84.07%, 83.49% and 83.23%, respectively.
To sum up, it shows that the advantage of Method 2 in time consumption is rapidly amplified with the enlargement of system scale, while the conservation increases very slightly.
5.3. Effect of Variable Parameter Number on Time Consumption
To analyze the effect of the number of variable parameters, the following tests are implemented. Set
N as 11 for the universal benchmark, Method 1 and Method 2 are employed for three scenarios with only one variable parameter, two variable parameters and three variable parameters, respectively. All the variable parameters are continuous adjustable equivalent admittances with the same variation ranges of [−0.1, 0.1] and pointwise steps of 0.0001. Corresponding results of time consumptions are shown in
Table 4 below.
By comparing the results in
Table 4, conclusions are deduced as follows.
- (1)
When variable parameter number increases, time consumptions of Method 1 and Method 2 are both increased.
- (2)
Compared with Method 1, time consumption of Method 2 increases much more slowly. Concretely, for the above three scenarios, time consumptions of Method 1 are 0.0726 s, 1.3418 × 102 s and 2.4596 × 105 s, which shows a trend of explosive increase. In contrast, time consumptions of the proposed Method 2 are merely 0.0061 s, 0.0085 s and 0.0115 s.
To sum up, it shows that the advantage of Method 2 in time consumption is more significant with the enlargement of the variable parameter number.
5.4. Improvement of Offline Analysis Efficiency of PFD Using the Proposed Method
According to the above comparative analyses, the proposed method shows remarkable superiorities in online evaluation of PFD. In addition, it can be used to improve the efficiency of offline evaluation of PFD as well.
Method 3, in which the proposed method is applied to give preliminary evaluation of PFD, and Method 1 is employed to sweep the rest parameter space to amend the domain, is proposed. Using Method 3 to analyze the 3-bus benchmark, results listed in
Table 5 can be obtained.
- (1)
In the view of time consumption, Method 3 is merely 38.91% of Method 1.
- (2)
In the view of the range of PFD, Method 3 is the same as Method 1.
For the other three benchmarks, similar results can be obtained as well. Concretely, time consumption results are listed in
Table 6.
From
Table 1,
Table 5 and
Table 6, it can be found that time consumptions of Method 3 are 38.91%, 29.64%, 22.61% and 21.90% of Method 1 for the four benchmarks, respectively.
Therefore, via preliminary evaluation using the proposed method, the offline analysis efficiency of PFD can be improved.
6. Conclusions
In this paper, a novel evaluation method of PFD is proposed. Firstly, the sufficient condition to prevent harmonic resonance is derived in the view of the singularity of harmonic network admittance matrix, via the extended Gersgorin theorem. Further, to reduce the conservation of the obtained PFD, a strategy is proposed to search the optimal STM, according to the non-uniqueness of STM. Eventually, availability and advantages of the method are demonstrated through different scale benchmarks.
- (1)
Via introducing MST, the inapplicability of the basic Gersgorin theorem for evaluating PFD is overcome. Through the proposed strategy to determine the optimal STM, reduction of the conservation of the obtained PFD is realized.
- (2)
It is suitable to implement online assessment of PFD in power grid. Compared with the pointwise precise eigenvalue computation-based method, it shows much better performance in analysis efficiency. Moreover, the larger the system scale or the greater the number of variable parameters, the more significant the advantage in computation efficiency.
- (3)
Besides, it can be used as preliminary assessment to improve offline analysis efficiency of PFD in power grid as well.
As the proposed method is put forward based on the derived sufficient condition, conservation is inevitable. More researches will be done to seek the way to further reduce the conservation in future work. Furthermore, theoretical method to determine ε will be sought as well.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}