1. Introduction
The Internet of Things (IoT) has revolutionized modern information systems by enabling seamless, large-scale connectivity among diverse devices. This ecosystem spans sensors, actuators, and mobile devices that communicate via standard network protocols. While short-range applications frequently employ GHz-based technologies (Wi-Fi, Bluetooth, ZigBee), long-range communications require more energy-efficient solutions, namely Low-Power Wide-Area (LPWA) networks operating in the MHz band [
1,
2,
3,
4,
5].
LPWA networks are fundamental to the development of smart ecosystems, including urban infrastructure, agriculture, and industrial monitoring. Their capabilities—extended coverage (up to 15 km outdoors), minimal energy consumption, and low data rates—make them ideal for applications such as environmental monitoring, smart lighting, waste management, and precision agriculture [
6,
7]. LoRa technology, in particular, stands out for its ability to support long-range communication while ensuring extended battery life for IoT devices, facilitating deployments in remote or inaccessible locations [
8,
9].
Operating within unlicensed industrial, scientific, and medical (ISM) frequency bands, LoRa, SigFox, and NB-IoT networks exhibit distinct characteristics in terms of communication modes, data rates, and cost of deployment. LoRa networks employ chirp spread spectrum (CSS) modulation, while LoRaWANs utilize this radio technology alongside a specific MAC layer to manage network communications. Frequency plans, channel assignments, spreading factors, and payload capacities vary regionally, with the European sub-1 GHz band encompassing 863 to 879 MHz and 433 MHz [
10].
However, LoRaWANs’ architecture also presents significant security challenges. The absence of centralized coordination for medium access control (MAC) increases susceptibility to network congestion and malicious interference. In particular, energy depletion attacks (EDAs) threaten battery-powered devices [
11], while frame collisions, duty cycle limitations (typically 1% under ETSI regulations), and uncoordinated transmissions amplify the vulnerability of the network [
12,
13,
14,
15]. These limitations become more pronounced as network density increases, with future deployments anticipated to involve thousands of devices operating within a single gateway’s range.
One critical threat to LoRaWANs is jamming, where malicious actors transmit disruptive signals to interfere with legitimate communication. This type of attack can undermine essential IoT applications, including alarm systems, fire detection, and environmental monitoring [
16,
17]. Jamming can target specific channels or spreading factors, with reactive jamming being particularly effective. In this method, attackers identify active transmissions and promptly emit interfering signals, disrupting packet delivery while minimizing their transmission footprint to avoid detection [
18].
This paper extends our previous work on reactive jamming attacks on LoRaWANs, originally presented in [
19]. Although the previous study demonstrated the feasibility of reactive jamming using two separate SDRs, its effectiveness was limited to only longer packets because of its slow reaction time. This work significantly expands on those findings by introducing much faster reaction times, including a single-device SDR configuration, accompanied by an experimental setup. In contrast, it broadens the analysis to all LoRaWAN scenarios (including fastest packets), with a more comprehensive analysis of reaction times, packet loss ratios, and interference effectiveness across all LoRaWAN spreading factors. Furthermore, we present an analysis of power spectral density, cumulative distribution functions for reaction times, and mitigation strategies to improve LoRaWAN security against reactive jamming attacks. This study explores the feasibility of executing reactive jamming attacks on LoRaWANs using commercially available software-defined radios SDRs (under 1000 EUR). The proposed approach demonstrates how attackers can exploit packet detection to initiate targeted interference, effectively compromising message integrity. Through two distinct experimental setups, one using separate SDRs for reception and transmission and another using a single SDR for both functions, this paper evaluates attack efficiency, reaction times, and packet loss ratios. The results highlight the significant vulnerability of LoRaWANs to low-cost jamming strategies while discussing potential countermeasures to improve network resilience against such threats [
20,
21,
22].
4. LoRaWAN
4.1. LoRaWAN Architecture
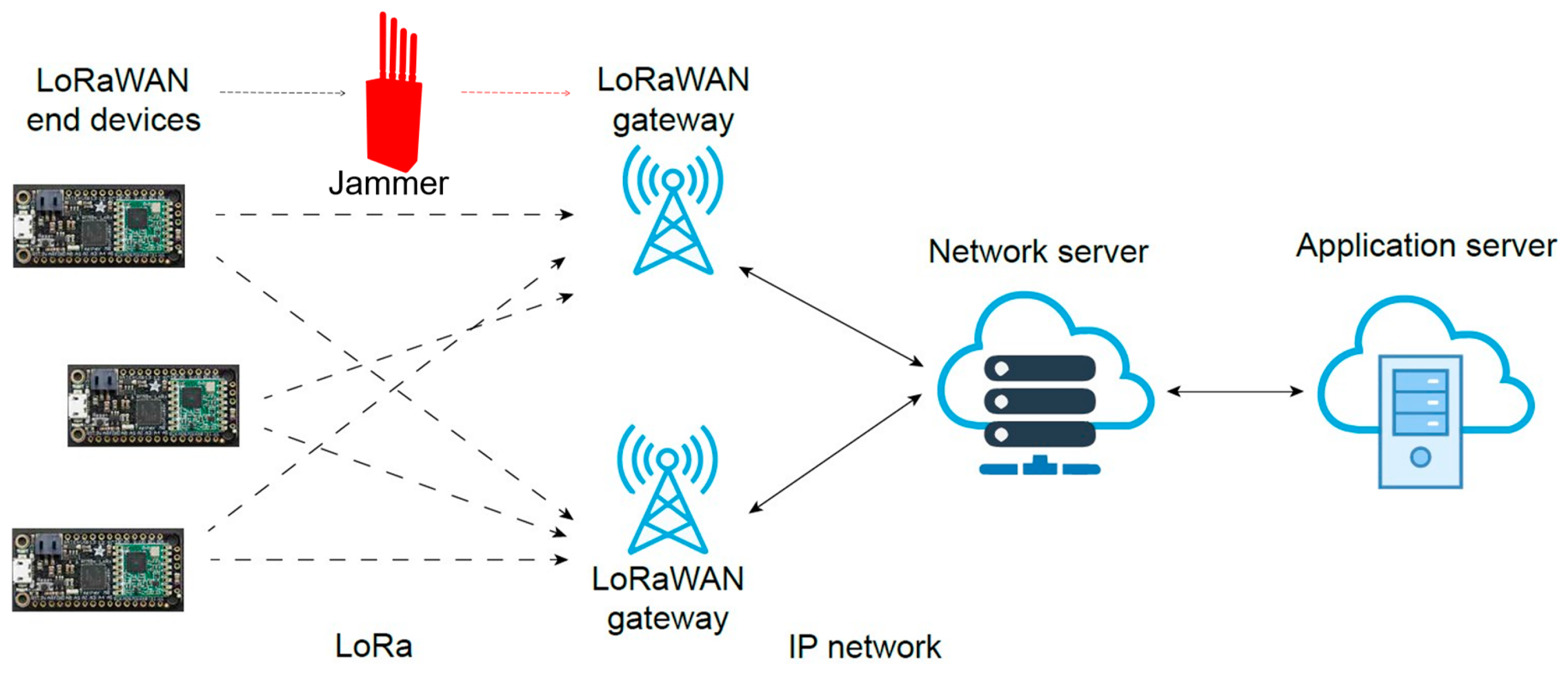
The LoRaWAN architecture consists of end devices, gateways, and a network server that enables communication between devices and applications. The end devices equipped with LoRa transceivers transmit data to gateways, which then send them to the network server for processing before transmitting them to application servers [
41]. LoRaWANs employ a star topology (
Figure 1), comprising LoRa end devices, one or more gateways, and a centralized network server.
4.2. End Devices
LoRaWAN end devices function as sensors or actuators that collect data from the environment or perform specific actions [
41]. These devices are optimized for low power consumption, allowing them to operate for extended periods on battery power. LoRaWAN end devices are categorized into three classes: Class A, Class B, and Class C [
42]. Class A devices transmit data only when necessary, ensuring energy efficiency. Class B devices are synchronized with periodic time slots to enable scheduled communications. Class C devices maintain continuous reception readiness for immediate downlink communication.
4.3. LoRaWAN Packet Structure
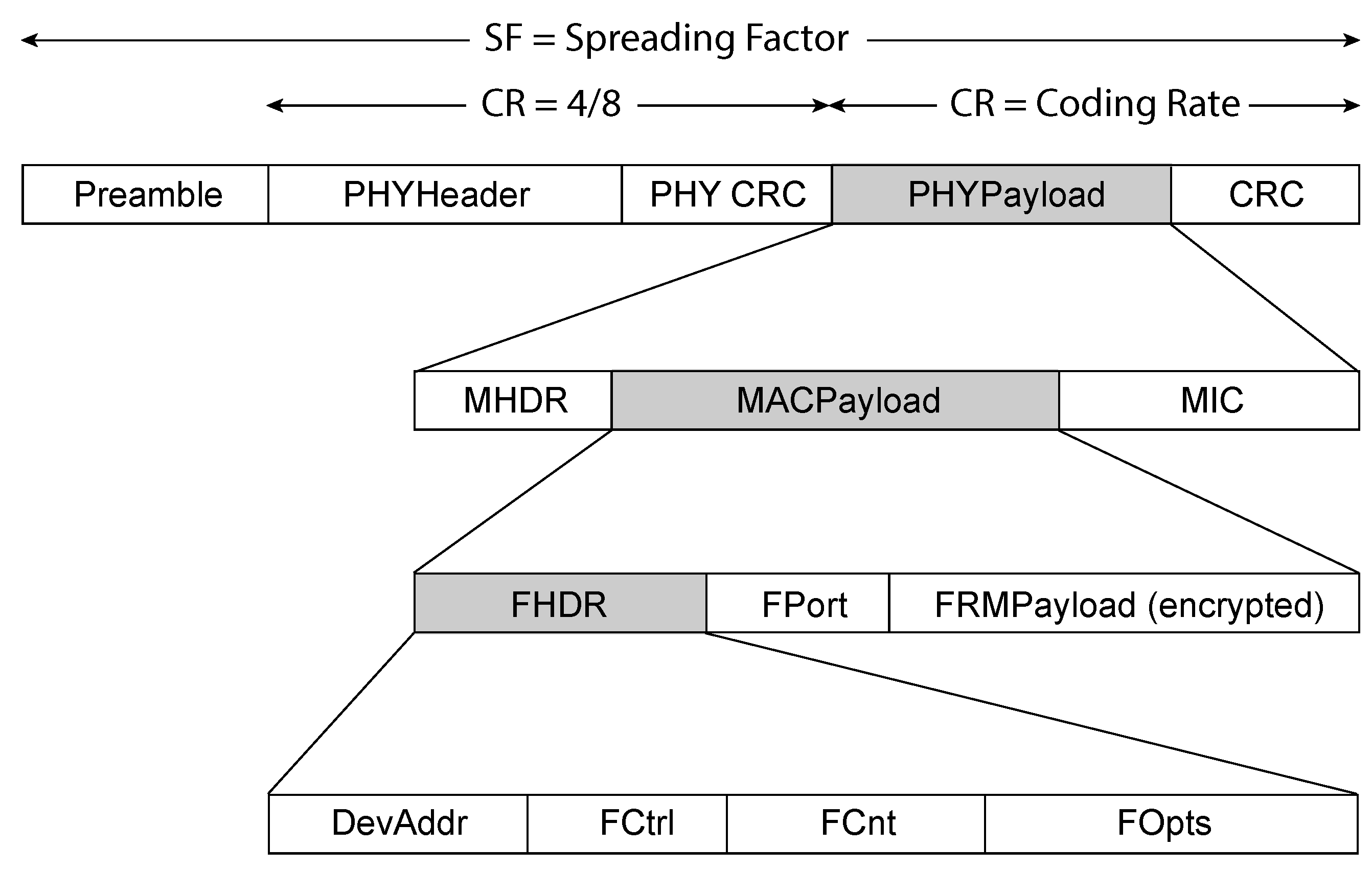
A LoRaWAN packet is structured to ensure reliable and efficient communication between end devices and the network infrastructure. It begins with the physical layer, which includes a preamble for synchronization, a header with metadata, and CRC fields for error detection. The packet also contains a MAC layer, which includes a MAC header (MHDR), a payload (MACPayload), and a Message Integrity Code (MIC) to ensure security. The MACPayload itself is further divided into components such as the Frame Header (FHDR), which provides routing information, the application port (FPort), and the encrypted data payload (FRMPayload), as shown in
Figure 2. This structured format allows for secure, error-free communication while facilitating proper routing and device identification [
41].
4.4. Threat Model
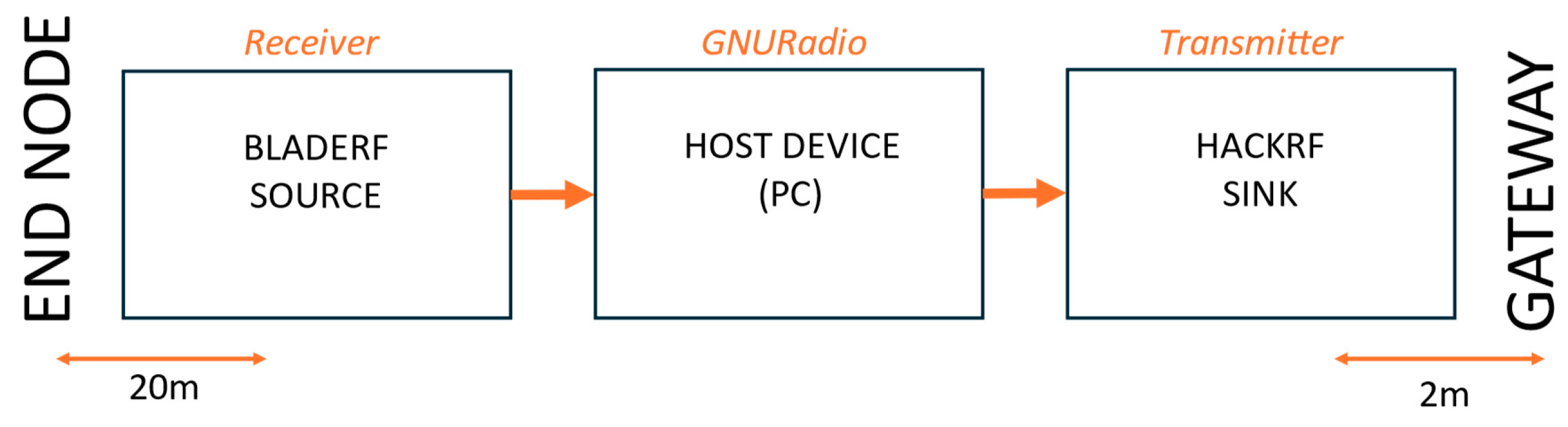
In this study, an active adversary model is considered in the context of LoRaWAN communication between the end nodes and the gateways. The attack scenario involves an adversary positioned between an end device and a gateway, monitoring the initiation of a LoRa transmission. Once the adversary detects the transmission, it determines key parameters such as frequency, spreading factor, and bandwidth. The attacker then transmits a high-power signal on the same channel and spread factor to prevent the legitimate message from reaching the gateway. If the jamming transmission successfully overlaps the original packet before it is complete, the attack effectively disrupts the communication.
To clarify the effectiveness and rationale behind focusing on reactive jamming,
Table 2 summarizes key performance criteria across different jamming techniques:
Reactive, broadband, sweep, and selective jamming are based on key performance factors. Broadband, sweep, and reactive jamming all cover the same frequency range but differ in efficiency, detectability, and adaptability. Broadband jamming continuously disrupts all frequencies within the band, making it highly effective but power-inefficient and easy to detect. Reactive jamming listens for active signals across all frequencies and only transmits when necessary, making it more energy-efficient and harder to detect, while still being highly disruptive.
Sweep jamming moves sequentially through frequencies, making it less efficient against LoRaWANs’ dynamic channel selection, as it may not always match an active transmission. Selective jamming, which targets a fixed frequency, is the least effective method, since LoRaWAN devices can transmit on different channels.
Since LoRaWAN devices randomly select transmission channels rather than using synchronized frequency hopping, broadband and reactive jamming are the most effective, while sweep jamming is situational, and selective jamming is the least practical. Reactive jamming, in particular, poses the greatest threat because of its ability to intelligently detect and jam active transmissions with minimal power consumption and lower detectability, making it a critical focus of this study.
6. Results
This section presents the experimental results obtained from implementing the reactive jamming attack on LoRaWANs in two distinct scenarios, as described in
Section 5. The primary metric for evaluating the attack’s effectiveness is the packet loss ratio (PLR), which indicates the percentage of packets successfully disrupted by the jamming attack. In addition, the reaction time distribution of the jammer is analyzed, highlighting differences in jamming performance between spreading factors.
6.1. Metrics Used to Measure Attack Effectiveness
The effectiveness of the reactive jamming attack was evaluated using two key metrics:
PLR: Defined as the percentage of packets transmitted that were successfully jammed and did not reach their intended destination.
Reaction Time Distribution: Analyzed using the cumulative distribution function (CDF), which illustrates the probability that the jammer reacts within a certain time threshold.
These metrics provide insight into the attack performance under different experimental setups and spreading factors.
6.2. Experimental Setup and Methodology
Multiple trials were conducted for each experimental condition, covering all SFs and different payload sizes (1, 5, 15, and 20 bytes). Repeating the trials was essential to ensure statistical reliability of the results and to account for hardware-induced variations in reaction times.
Ensuring Reproducibility: Given that SDR-based systems experience slight timing fluctuations due to processing delays, multiple trials helped confirm the consistency of attack effectiveness.
Comparing Different Scenarios: Conducting multiple trials for Scenario I (HackRF One + bladeRF) and Scenario II (bladeRF only) ensured a fair comparison of the two setups.
For each SF, we transmitted and jammed 100 packets in varying payload sizes, and the PLR was measured for each condition. Reaction times were analyzed using the CDF to observe variations between trials. This approach ensured that our conclusions were robust, repeatable, and statistically valid. Although the mean reaction time was used for a general comparison between Scenario I and Scenario II, we relied on CDFs to visualize the probability of the jammer reacting within a specific time, clarifying reaction time differences across spreading factors. The transmitter, receiver, and gateway were kept at a fixed distance to ensure that distance was not a factor in the results, and attention remained focused on synchronization rather than signal power.
To further analyze jamming effectiveness, both power spectral density (PSD) and spectrograms were recorded using an additional HackRF One SDR, which continuously captured raw IQ samples during the jamming process. The PSD was processed using Python 3.10.12-based tools to compute the power distribution over frequency. Similarly, spectrograms were generated to provide a time–frequency representation, illustrating how the jamming signal evolved over time and aligned with LoRaWAN transmissions. These measurements provided insight into reaction timing, interference patterns, and the overall impact of jamming on network performance.
6.3. Detailed Experimental Results
6.3.1. Power Spectral Density Analysis (PSD)
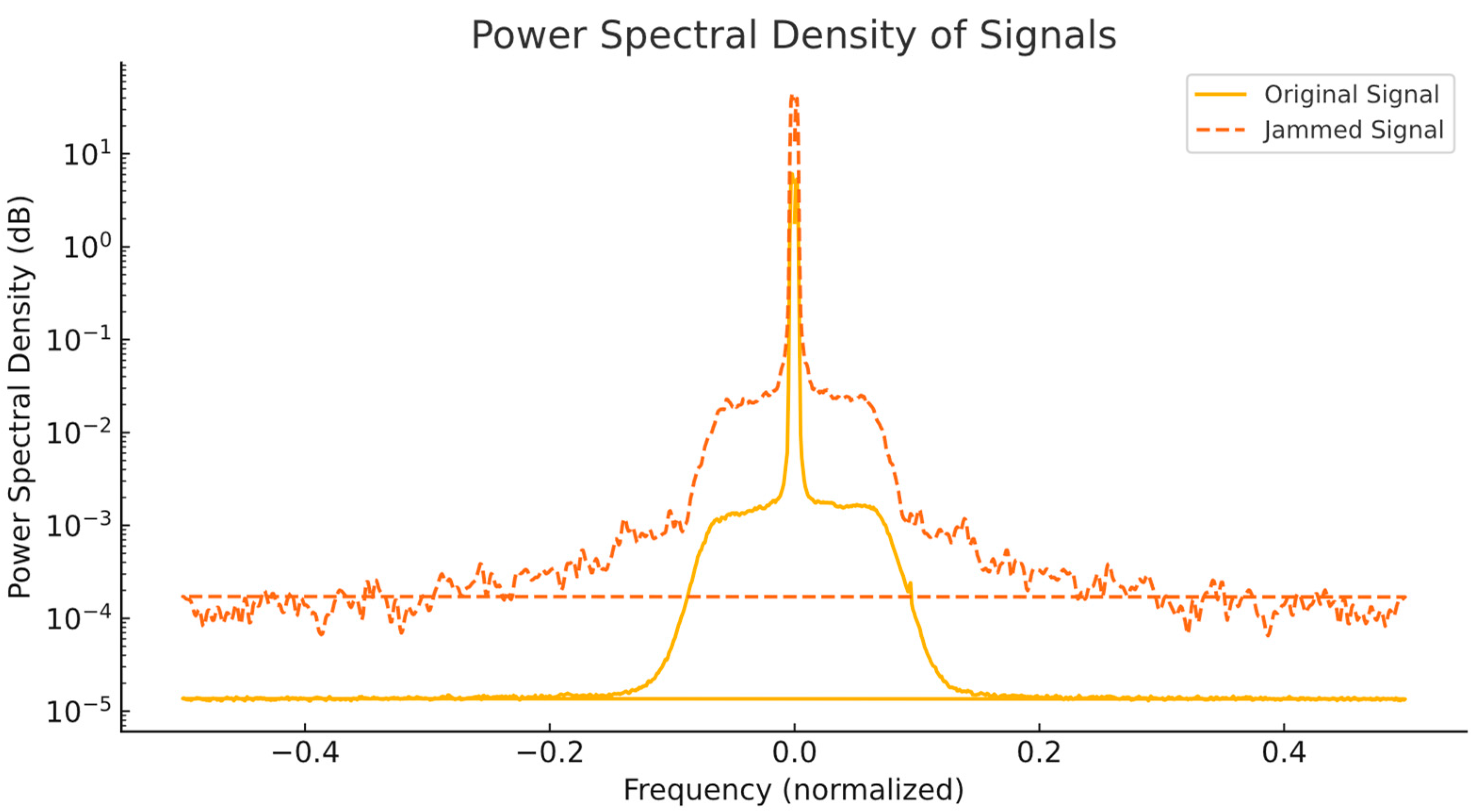
The PSDs of both the legitimate LoRaWAN signal and the jamming signal are shown in
Figure 9. This plot highlights the frequency synchronization between the two signals, which is critical for effective jamming.
The PSD plot demonstrates the following:
The jamming signal aligns closely with the center frequency of the legitimate LoRaWAN signal (normalized to 0), ensuring effective interference.
The power level of the jamming signal is consistently higher than that of the legitimate signal on overlapping frequencies, effectively overpowering it.
This frequency synchronization is critical for successful jamming as it ensures that key portions of legitimate communication are disrupted. Without proper alignment frequency, the jammer would not effectively interfere with LoRaWAN transmissions.
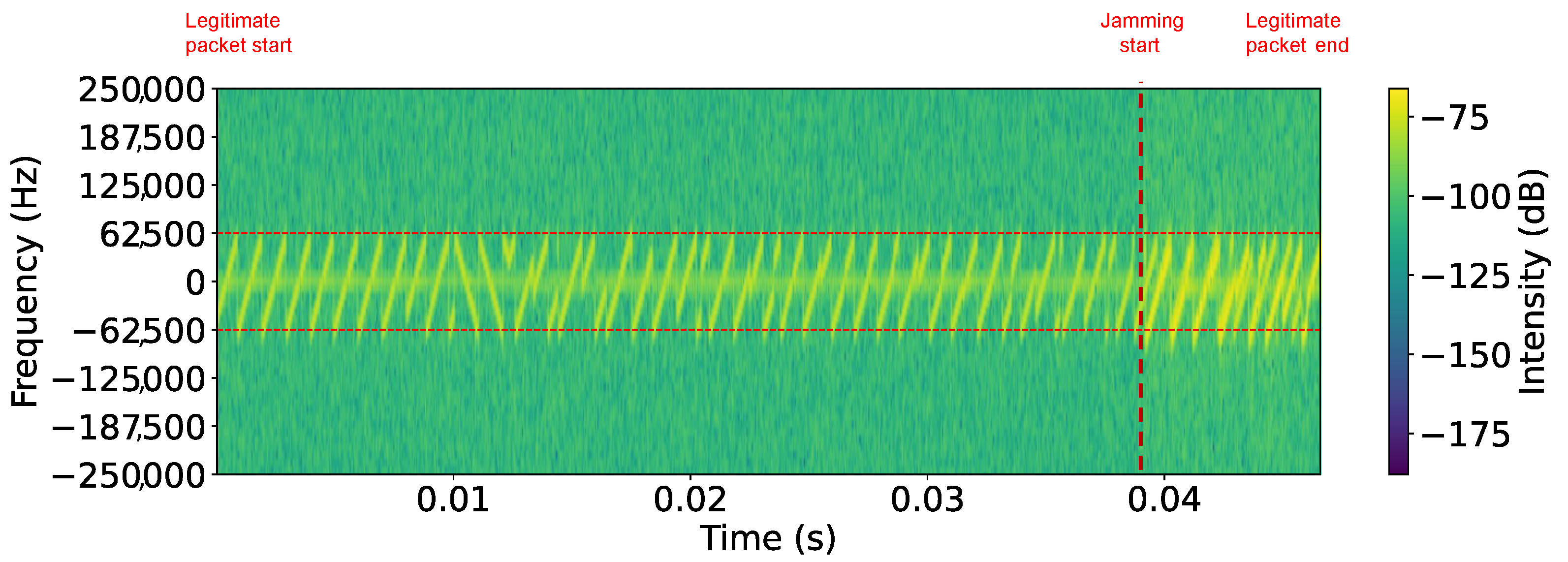
6.3.2. Scenario I: BladeRF as Receiver, HackRF One as Transmitter
Figure 10 shows the spectrogram of an SF7 LoRaWAN jammed packet in Scenario I, where the start of the legitimate packet and the onset of jamming are clearly visible and marked. The legitimate packet appears as well-defined, evenly spaced chirps, but once jamming begins, the signal structure becomes distorted and no longer clearly visible, accompanied by a noticeable change in signal power.
Table 3 summarizes the PLR achieved in Scenario I. The results indicate a significant impact on LoRaWAN communication, with packet loss 100% achieved across all spreading factors when the payload size was 5, 15, or 20 bytes. However, for a payload size of 1 byte, jamming was slightly less effective in SF7, where packet loss was 50%. Across all trials, payloads of five bytes or more incurred 100% packet loss, highlighting the power of reactive jamming.
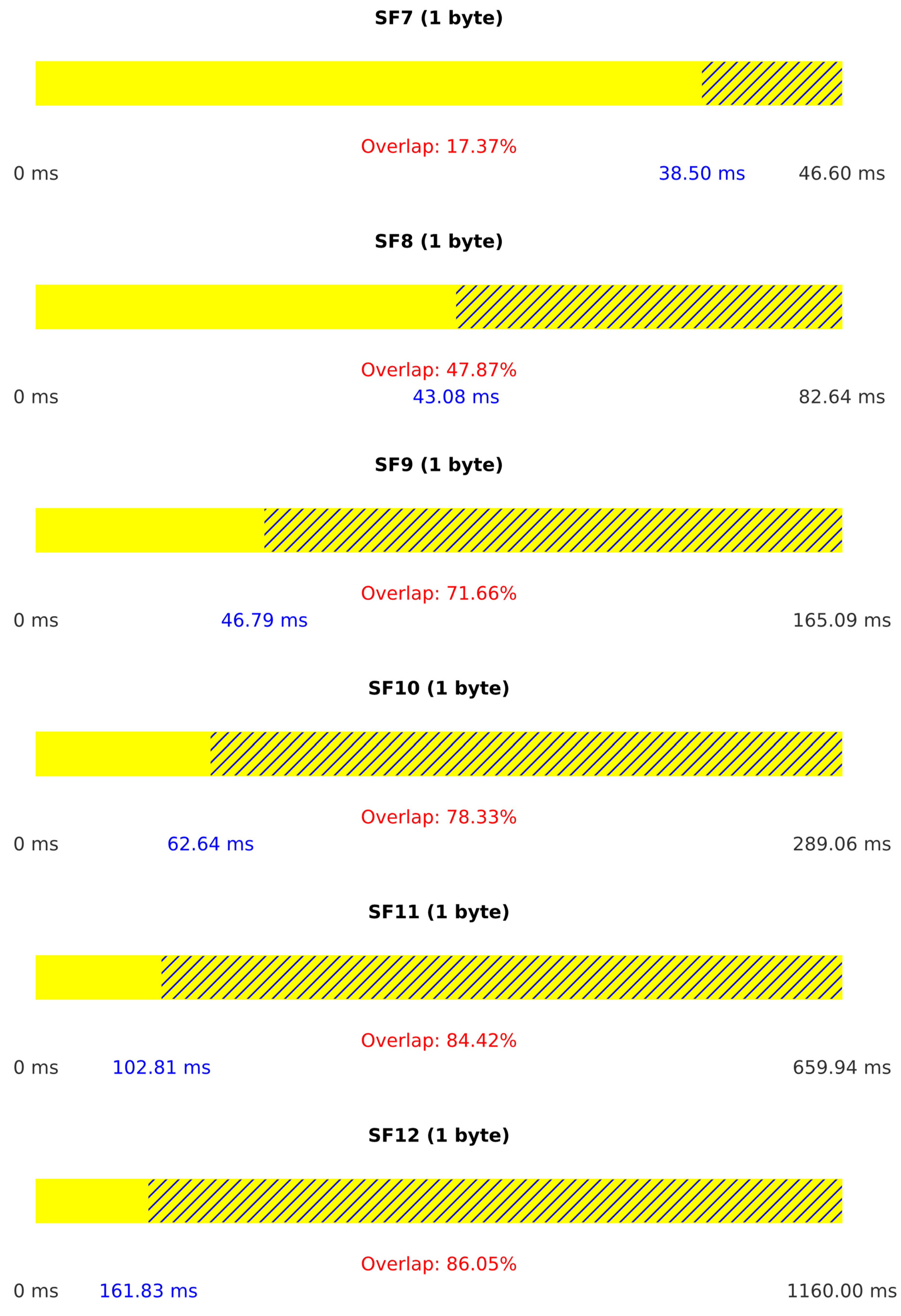
Figure 11 provides additional insight into the attack performance by illustrating the duration of legitimate packets for each spreading factor and the percentage of overlap between legitimate and jamming packets. Higher overlap percentages indicate more effective jamming.
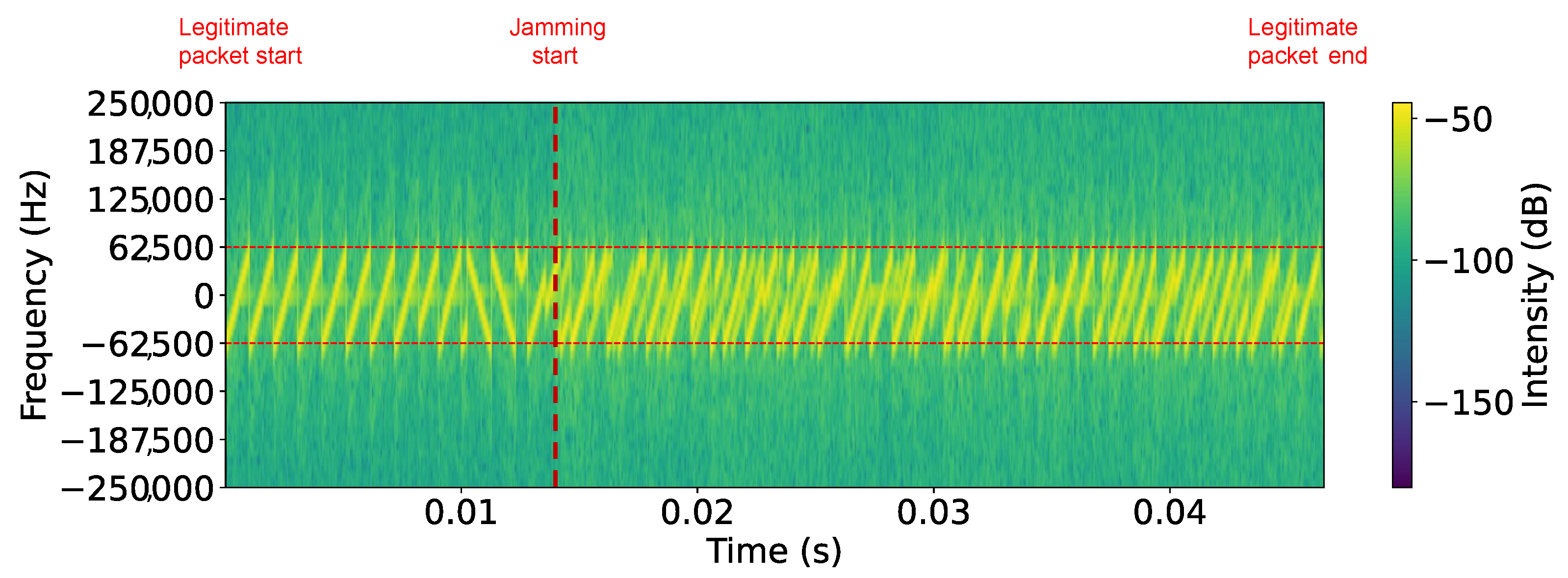
6.3.3. Scenario II: BladeRF as Both Receiver and Transmitter
Figure 12 presents the spectrogram of an SF7 LoRaWAN jammed packet in Scenario II. Like in the Scenario I spectrogram, the start of the legitimate packet and the onset of jamming are clearly marked. The legitimate signal initially appears as well-defined chirps, but once jamming starts, the signal structure becomes distorted.
Table 4 presents the PLR for Scenario II, where the reactive jamming attack proved universally effective. Unlike Scenario I, Scenario II achieved a 100% PLR across all SFs and payload sizes, demonstrating the advantage of using the bladeRF for both receiving and transmitting.
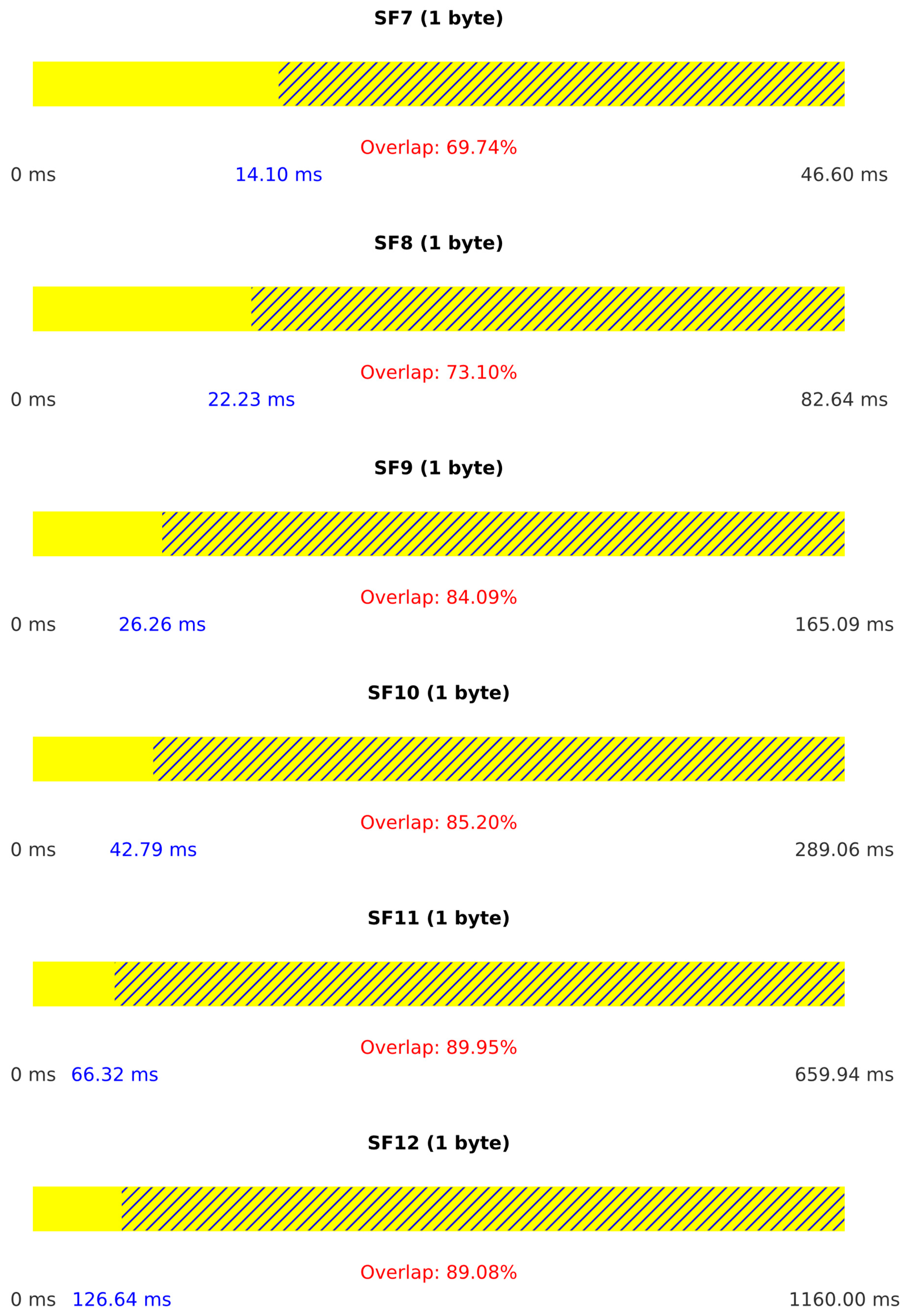
Figure 13 illustrates the duration of legitimate packets and the percentage of overlap between legitimate and jamming packets. The streamlined single-device operation results in consistently high overlap percentages, explaining the superior jamming effectiveness in this scenario.
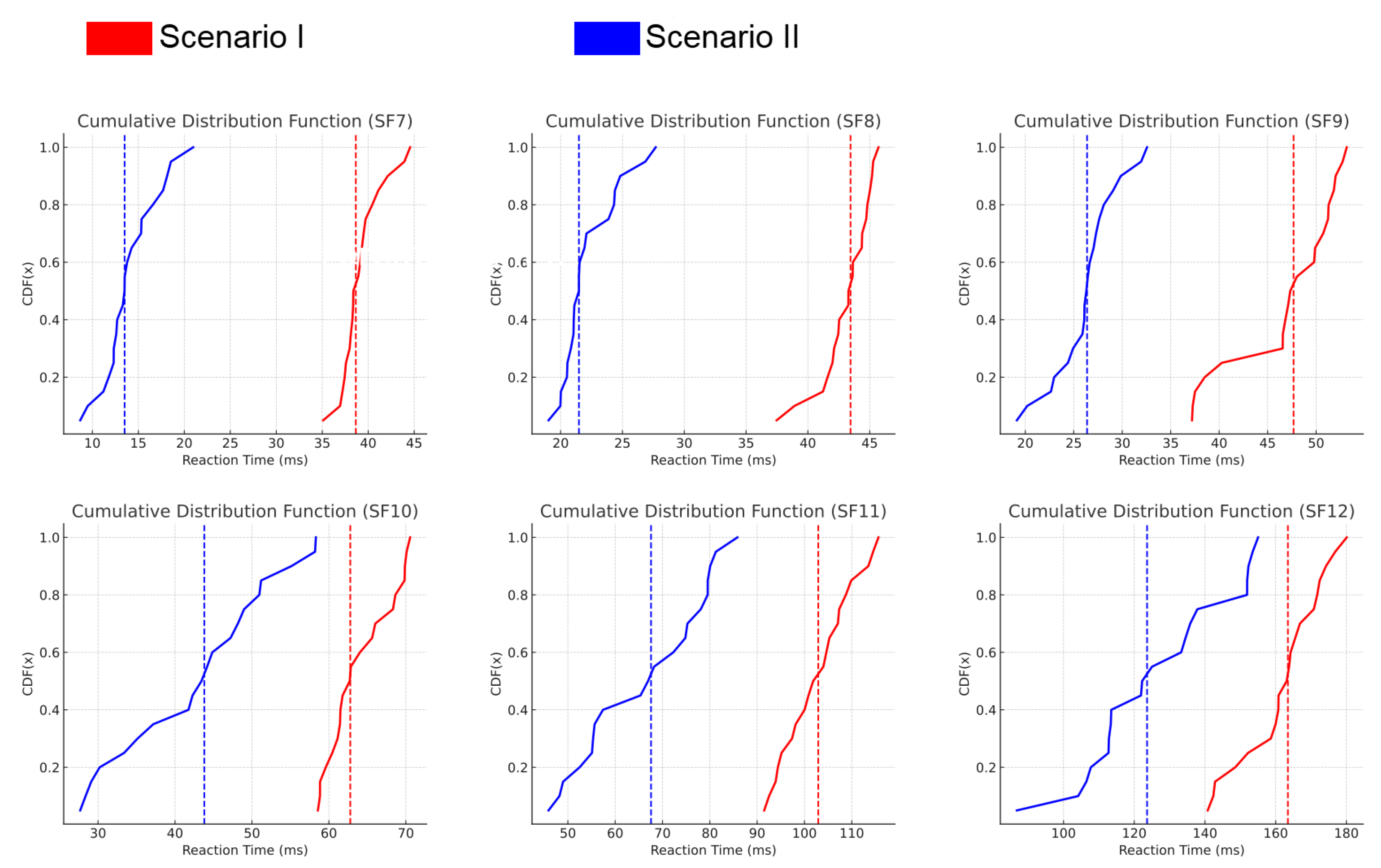
The reaction times of the jamming system in both Scenario I and Scenario II are analyzed using CDF graphs in
Figure 14. In both scenarios, reaction times vary based on the spreading factor (SF), with lower SF values resulting in faster reaction times due to shorter symbol durations. In Scenario I, reaction times also show slight variability due to inter-device communication delays, which affects the effectiveness of jamming as shorter reaction times allow greater packet disruption. Similarly, Scenario II exhibits comparable behavior, where faster reaction times enhance the impact of jamming.
To complement these graphical results,
Table 5 provides a numerical summary of the mean reaction times and standard deviations for both scenarios.
6.4. Limitations
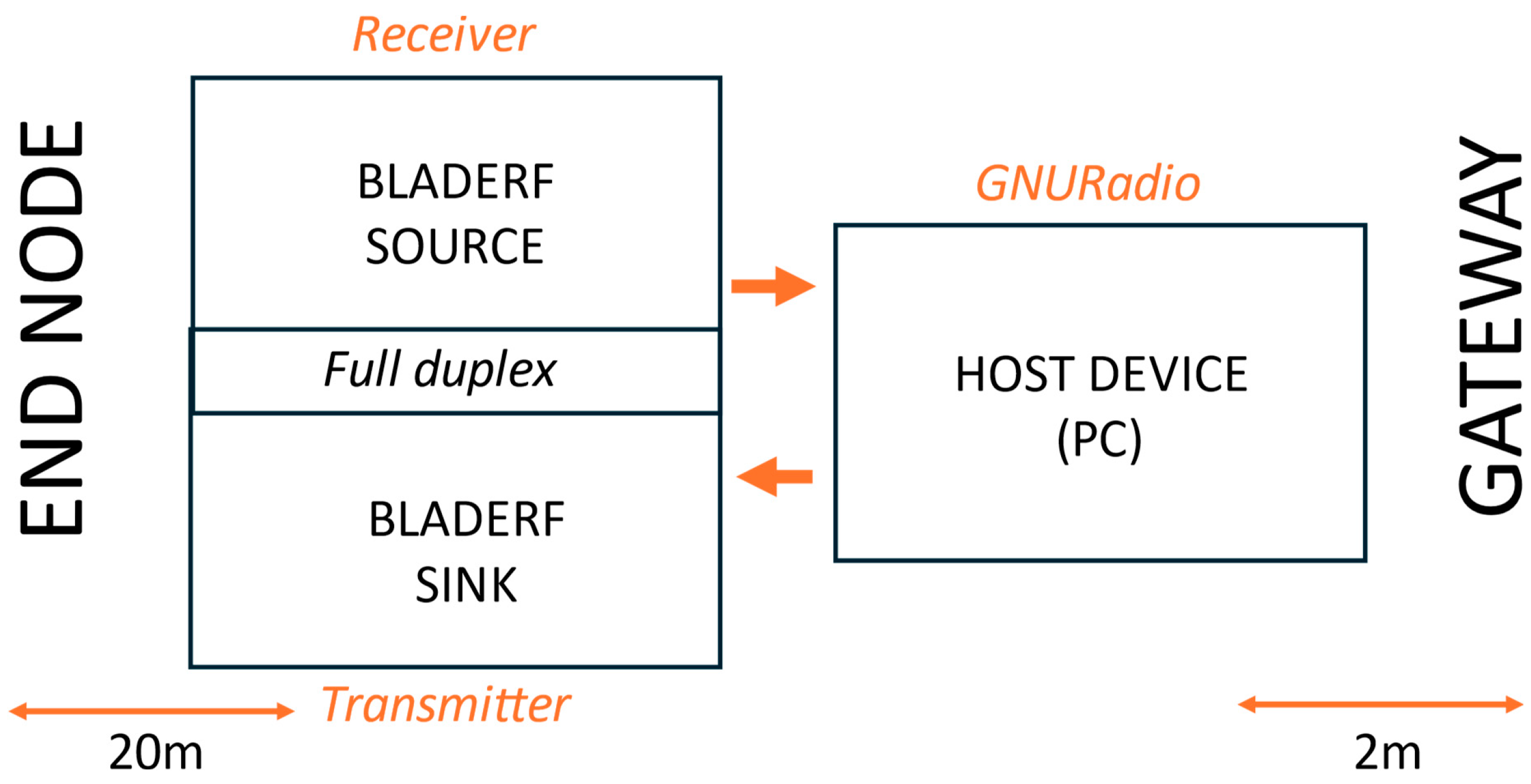
The experimental setup was designed to isolate the impact of the reactive jamming attack on LoRaWANs, and care was taken to keep external parameters consistent in multiple trials. However, the evaluation does have some limitations, such as the transmitter, receiver, and gateway being kept at a fixed distance to ensure that distance was not a factor in the results.
6.5. Reactive Jamming Attack on LoRaWAN: A Realistic Scenario
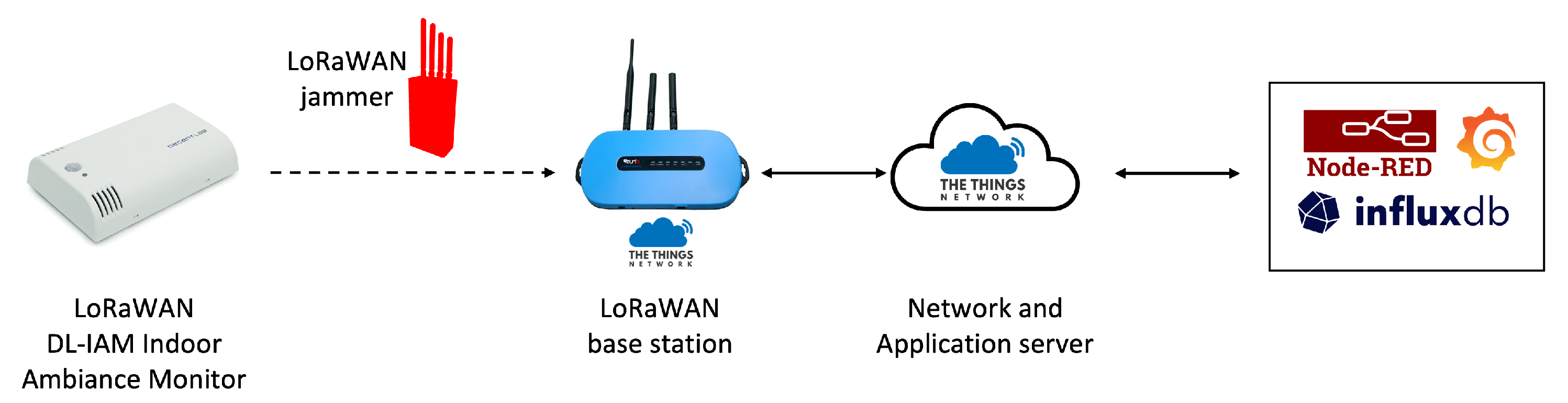
This subsection describes a realistic scenario of our reactive jamming attack targeting a LoRaWAN-based indoor air quality monitoring system. The experiment involved a commercial DL-IAM Indoor Ambiance Monitor device, which transmits environmental data (temperature, humidity, CO2, and illuminance) every 10 min over the LoRaWAN.
6.5.1. Experimental Setup
The experimental setup consisted of the following components:
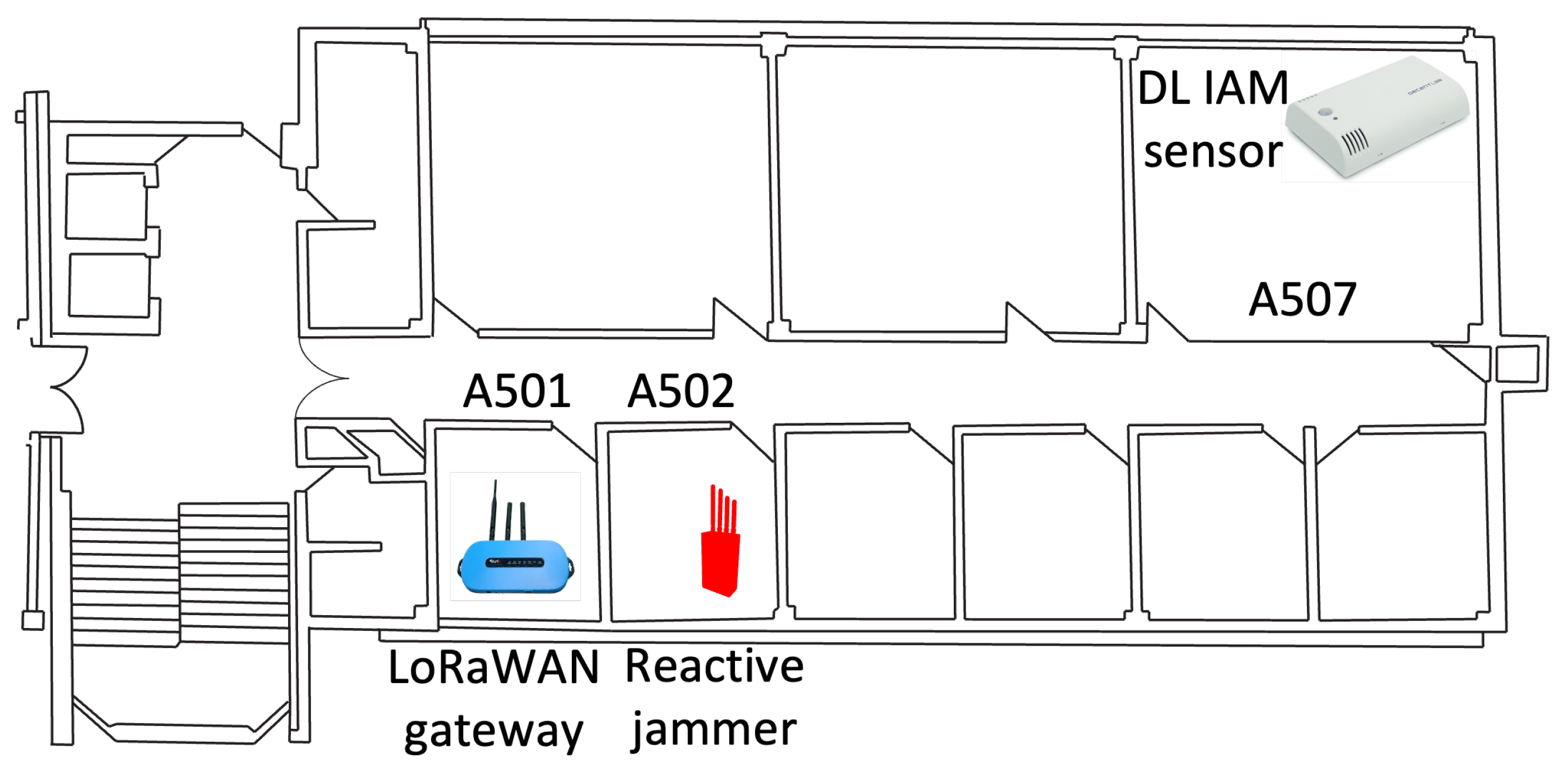
DL-IAM Sensor Placement: The DL-IAM Indoor Ambiance Monitor was placed in office A507.
LoRaWAN Gateway Placement: A Laird LoRaWAN gateway was installed in office A502 to receive sensor transmissions and forward them to The Things Network (TTN).
Jammer Placement: Our reactive jammer was located in office A501, positioned between the sensor and the gateway to effectively disrupt communication.
The physical layout of our experimental setup is illustrated in
Figure 15, showing the strategic positioning of all components within the office environment. This arrangement created a realistic scenario where the jammer was positioned to intercept communications between the sensor and the gateway. The overall architecture of the system is depicted in
Figure 16.
6.5.2. Attack Implementation and Results
The jammer was active between 15:42 and 16:08, during which it successfully performed a reactive jamming attack on two messages sent by the DL-IAM device. The jammer listened for LoRaWAN transmissions and selectively disrupted them by transmitting interference signals during legitimate communication attempts.
As shown in the floor plan (
Figure 15), the physical separation between rooms created a realistic deployment scenario, with the jammer strategically positioned to intercept transmissions between the sensor and the gateway. This layout mimics real-world IoT deployments, where devices may be distributed across different locations within a building.
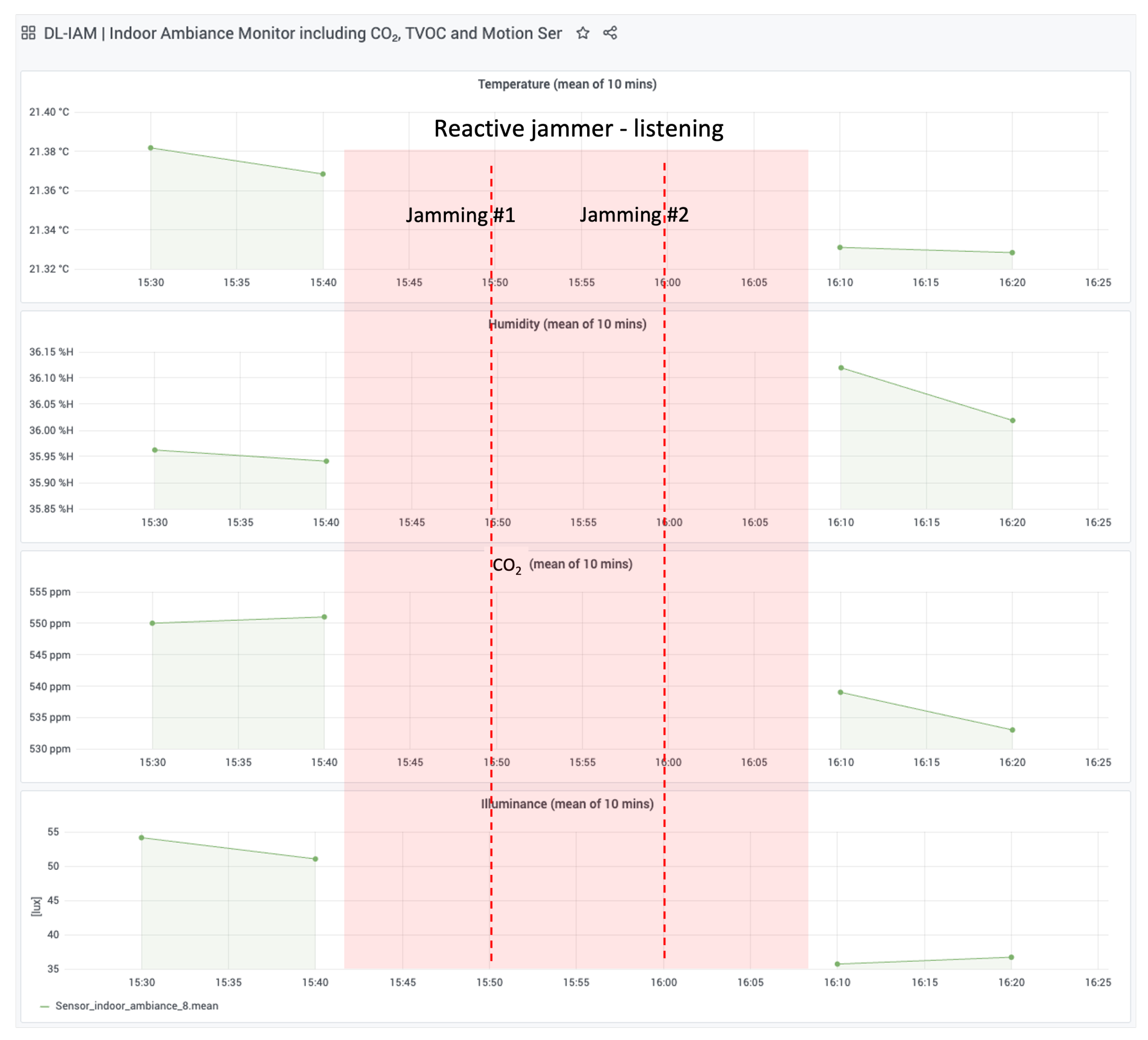
The results of the attack are visualized in
Figure 17, which shows data collected from TTN and stored in a local InfluxDB database. Key observations include the following:
Jamming Events: Two successful jamming events were recorded at approximately 15:50 and 16:00.
Data Interruption: During the jammer’s active period (highlighted in red), no data were received from the DL-IAM device, confirming the success of the attack.
Environmental Parameters: Temperature, humidity, CO2 levels, and illuminance readings show continuity before and after the jamming period, demonstrating normal sensor operation outside the attack window.
This experiment demonstrates how a reactive jammer can selectively disrupt LoRaWAN communications by targeting specific transmissions. The attack demonstrates how a reactive jammer can selectively target LoRaWAN communications by listening for transmission preambles and then transmitting interference signals precisely when legitimate data are being sent. By storing data from TTN in our local InfluxDB and visualizing them through Grafana, we can clearly observe the attack’s impact on network communications while maintaining comprehensive visibility of the entire system’s behavior.
7. Discussion
The results of this study demonstrate the significant vulnerability of LoRaWANs to reactive jamming attacks, with both scenarios showing high effectiveness across different spreading factors and payload sizes.
7.1. Comparison of Scenarios
Scenario II, using a single bladeRF for both receiving and transmitting, proved to be more effective than Scenario I, which used separate devices for receiving (bladeRF) and transmitting (HackRF One). This difference is particularly notable for SF7 with 1-byte payloads, where Scenario I achieved a packet loss of only 50% compared to 100% in Scenario II.
7.2. Jamming Effectiveness and Packet Overlap
Our findings confirm that reactive jamming success is strongly tied to how much the jamming signal overlaps the legitimate packet. In particular, for payloads of five bytes or more, both scenarios consistently yielded a 100% packet loss.
Because partial overlap can invalidate the entire packet, LoRaWANs remain highly vulnerable to targeted interference. Future studies could explore the minimal jamming packet size needed for disruption and whether particular packet fields are more prone to attack.
7.3. Reaction Time and Spreading Factors
The CDF graphs show that reaction times vary with spreading factors:
Lower SFs (e.g., SF7) exhibit faster reaction times due to shorter symbol durations.
Higher SFs allow for longer reaction times while still achieving successful jamming because of larger duration of the packet.
This variation in reaction times across SFs provides information on the time-sensitive nature of the LoRaWAN packet structure and the critical windows for effective interference.
7.4. Legal Considerations and Spectrum Licensing
Our findings highlight LoRaWANs’ technical vulnerabilities to reactive jamming using SDRs. However, practical experiments that involve intentional interference must comply with relevant regulations. Intentional disruption, even within unlicensed ISM bands, is prohibited by regulatory bodies (e.g., FCC, ETSI) and can result in significant penalties. Therefore, interference testing should always be performed in controlled laboratory conditions (such as RF-shielded chambers) or with appropriate regulatory authorization to ensure legal compliance.
7.5. Countermeasures
To mitigate the vulnerabilities of LoRaWANs against jamming attacks, several strategies can be implemented.
An effective countermeasure against severe jamming in LoRaWANs is a PHY-layer technique that leverages spatial and temporal diversity. Haque and Saifullah [
43] propose JRLoRa, a system where multiple gateways capture the same jammed signal at different timing offsets. These offsets are exploited at the network server to reconstruct the original LoRa packet by subtracting jamming artifacts. The process involves secure sample sharing, synchronization, sample classification (with CNN), and iterative recovery. This approach is fully compatible with COTS devices and significantly improves performance, even when the SNR drops below −35 dBm. Importantly, it does not require changes to the LoRa node’s physical layer.
To mitigate synchronized jamming attacks in LoRaWANs, Hou et al. [
44] propose a novel RSS-based decoding technique that enhances resilience at the gateway level. The core idea is to distinguish legitimate LoRa chirps from jamming chirps based on their power differences in the demodulation window. Upon detecting a packet, the receiver uses the preamble to establish a reference power profile. Then, instead of selecting the strongest FFT peak, as in standard decoders, it selects the peak that best matches the expected RSS. This allows the system to recover legitimate symbols even when synchronized jamming chirps are present. This method complements existing time- and frequency-domain countermeasures and achieves significantly higher packet recovery rates without requiring any modification to the end devices.
Integrating the Long-Range Frequency-Hopping Spread Spectrum (LR-FHSS) into the LoRaWAN protocol significantly enhances network capacity and robustness to interference. This technique involves breaking each data packet into smaller pieces and transmitting them over various frequencies, thus reducing the impact of jamming and improving spectral efficiency [
45].
Martinez [
46] proposes a comprehensive framework for detecting and mitigating jamming in LoRaWANs. The author categorizes countermeasures into proactive, reactive, and detection-based approaches. Among the detection methods, a statistical approach based on the Exponentially Weighted Moving Average (EWMA) is presented, leveraging RSSI and inter-arrival time to flag anomalies. In addition, a recurrent neural network (RNN) is trained to classify normal and jammed states using temporal patterns in traffic features. On the reactive side, the thesis discusses jamming-aware ADR schemes, jamming zone mapping through detection metrics, and the deployment of dedicated detection nodes to monitor spectral activity. These techniques offer layered protection against various jamming strategies without modifying end devices.
Strategies like directive antennas can be employed to focus signal strengths in specific directions, minimizing the risk of jamming by reducing the overall exposure of the signal [
47]. By adopting a combination of these strategies, LoRaWANs can enhance their resilience against jamming attacks, ensuring reliable and secure communication for critical applications.
7.6. Future Research Directions
- 1.
Minimal Jamming Packet Size: Investigate the minimum size of jamming packets (e.g., few chirps) required for successful disruption.
- 2.
Targeted Jamming: Analyze which specific parts of LoRaWAN packets are most vulnerable to jamming.
- 3.
Real-world Deployment Impact: Assess the effectiveness of the attack in various environmental conditions and network topologies.
- 4.
Advanced Countermeasures: Develop and test sophisticated defense mechanisms against reactive jamming.
This study underscores the urgent need for improved security measures in LoRaWANs, especially as IoT deployments continue to expand. The high success rate of jamming attacks, even with partial packet overlap, highlights a significant vulnerability that could potentially disrupt critical IoT applications that rely on LoRaWAN technology.
8. Conclusions
We implemented a practical reactive jamming attack on a LoRaWAN using low-cost SDRs (HackRF One and bladeRF) in two experimental configurations. Both approaches severely disrupted LoRaWAN traffic in all spreading factors, reaching 100% packet loss in almost every case. In particular, a single device setup produced faster and more consistent jamming, underscoring the susceptibility of LoRaWANs to time-critical interference.
These findings highlight the inherent vulnerabilities of LoRaWANs when confronted with reactive jamming, particularly given LoRaWANs’ reliance on unlicensed ISM frequency bands and their use of ALOHA-based medium access without robust collision-avoidance mechanisms. Even partial overlap of legitimate and jamming signals was sufficient to prevent successful reception, underscoring the critical nature of precise timing and frequency alignment in attack execution.
Mitigating these vulnerabilities in LoRaWANs requires improvements at both the physical and network layers. Potential defenses include improved spread-spectrum techniques, dynamic channel hopping, or adaptive power and data-rate configurations. Furthermore, real-time jamming detection and proactive response strategies warrant focused research efforts.
As IoT applications relying on LoRaWANs continue to expand into mission-critical domains, addressing these security gaps becomes increasingly urgent. Future research directions should therefore focus on developing and rigorously testing countermeasures, such as early detection and mitigation algorithms, to maintain reliable, secure communication in large-scale IoT deployments.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}