




ARMA Model for Tracking Accelerated Corrosion Damage in a Steel Beam

 ,
,  , ,
, ,  , , , and
, , , and 
Abstract
1. Introduction
2. Materials and Methods
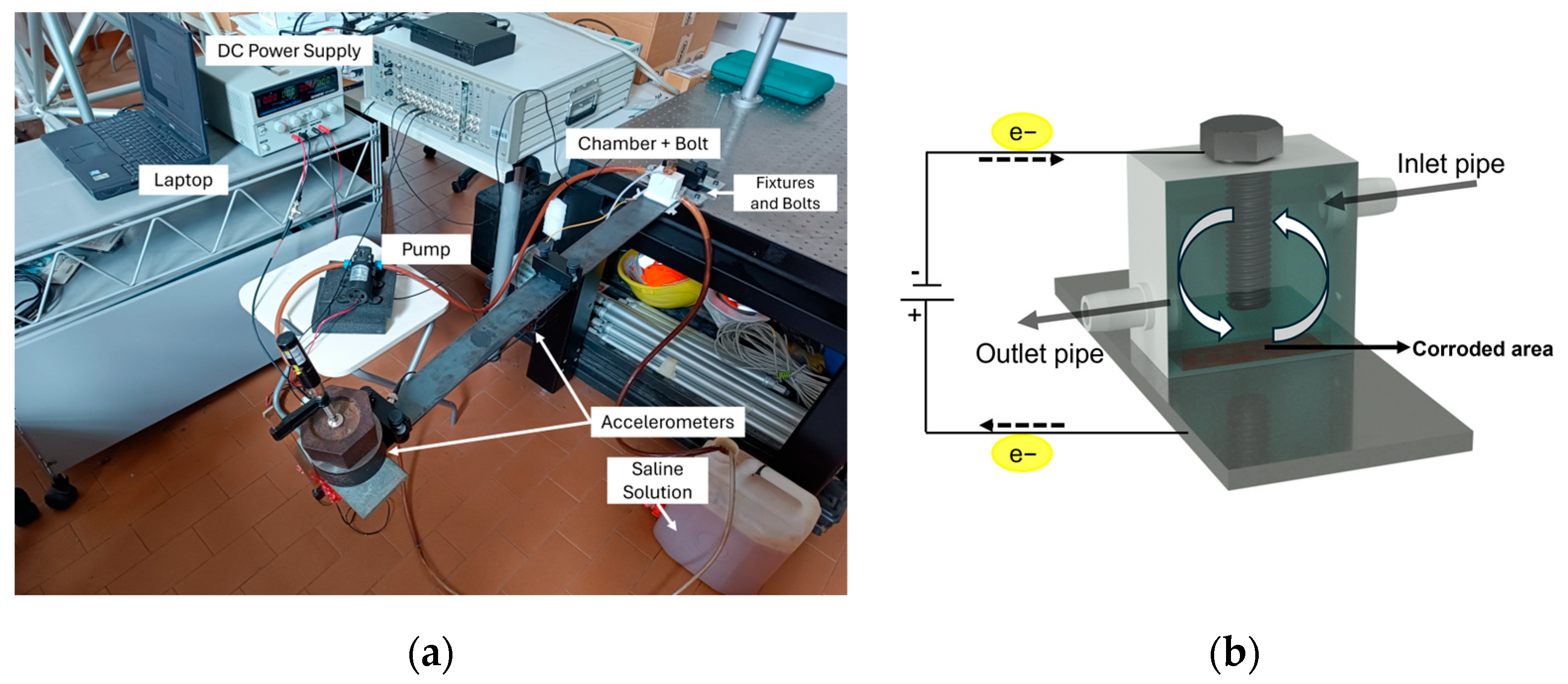
2.1. Experimental Setup
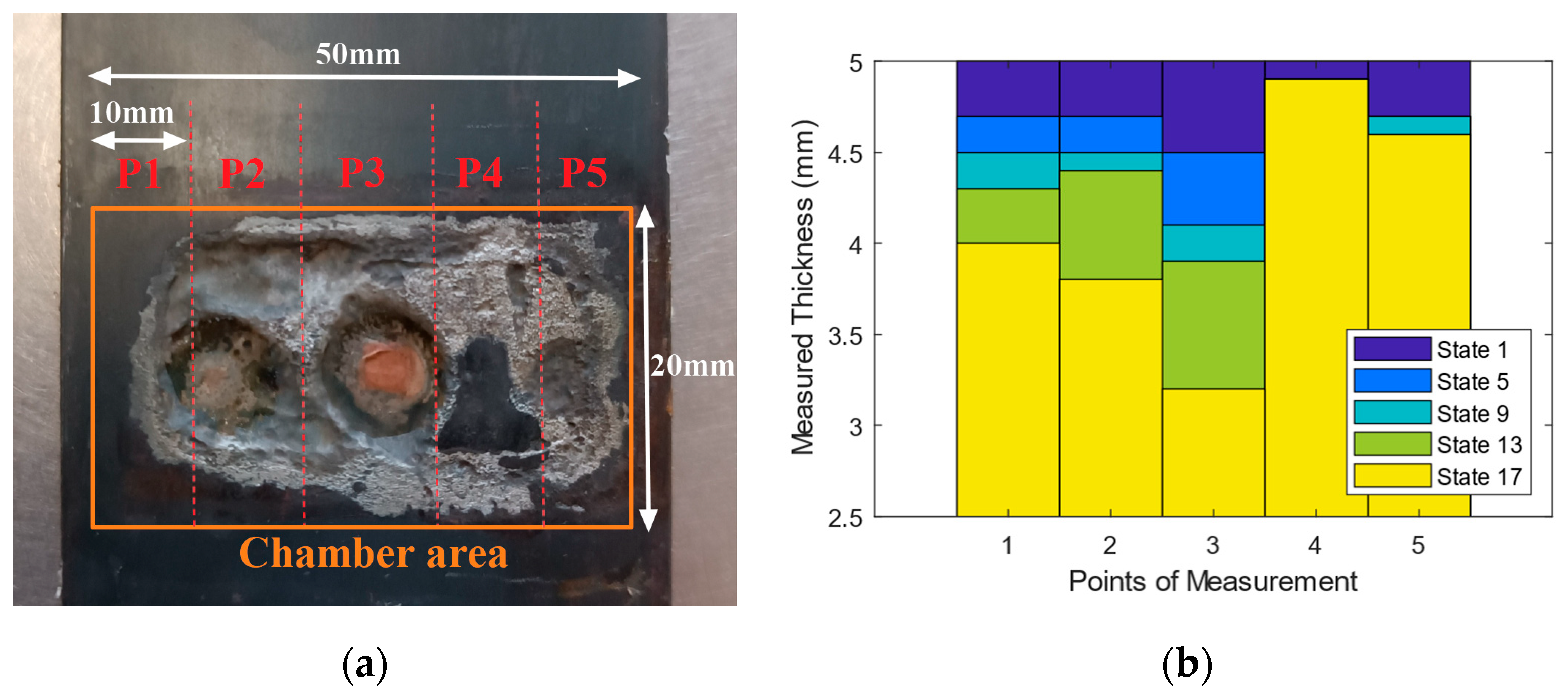
2.1.1. Specimen Description
2.1.2. Continuous Damage Growing
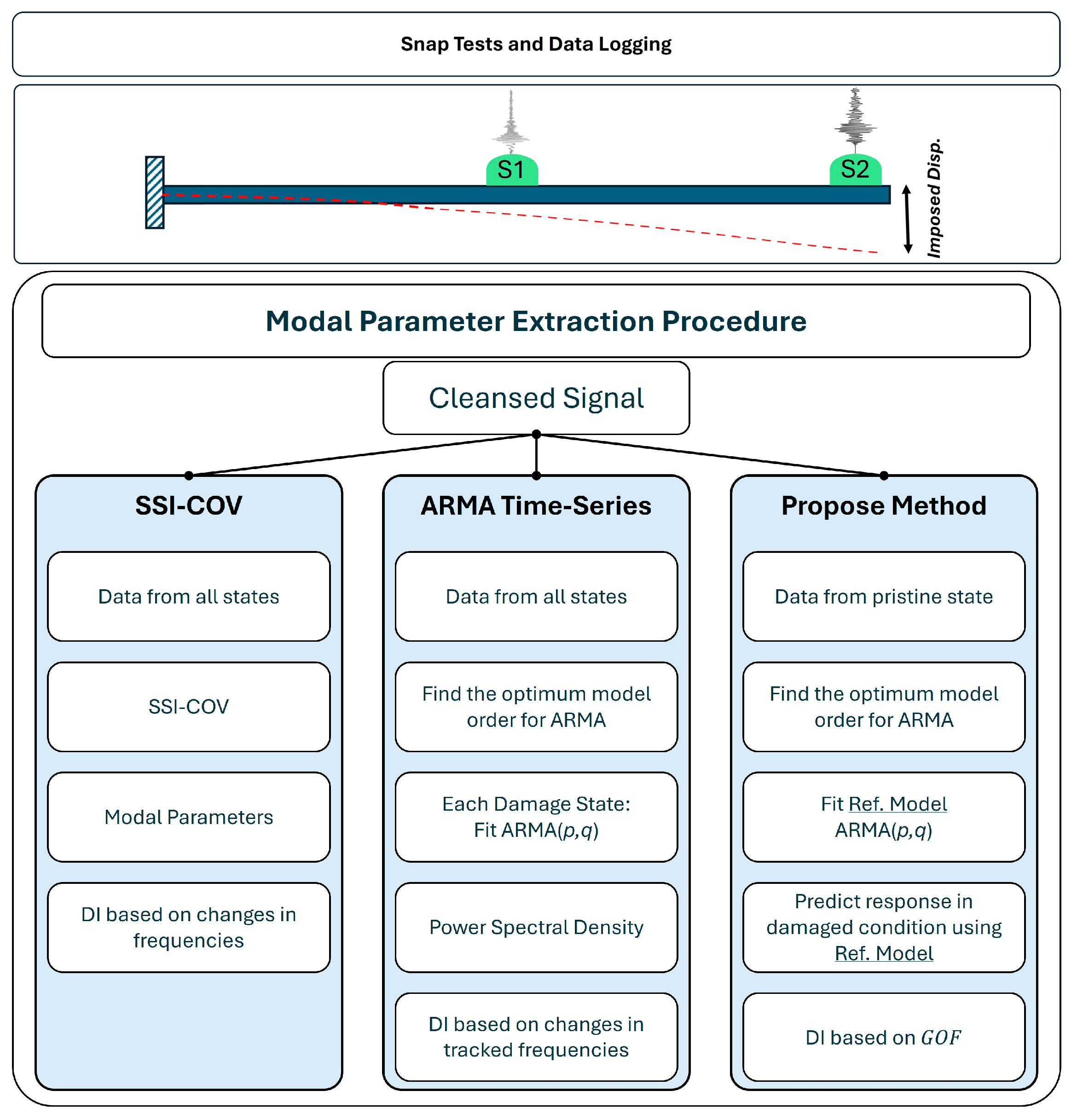
2.1.3. Free Vibration Tests
2.2. Data Processing
2.2.1. Data Pre-Processing
2.2.2. General Overview of Modal Parameter Extraction
- I.
- Covariance-Based Stochastic Subspace Identification
- II.
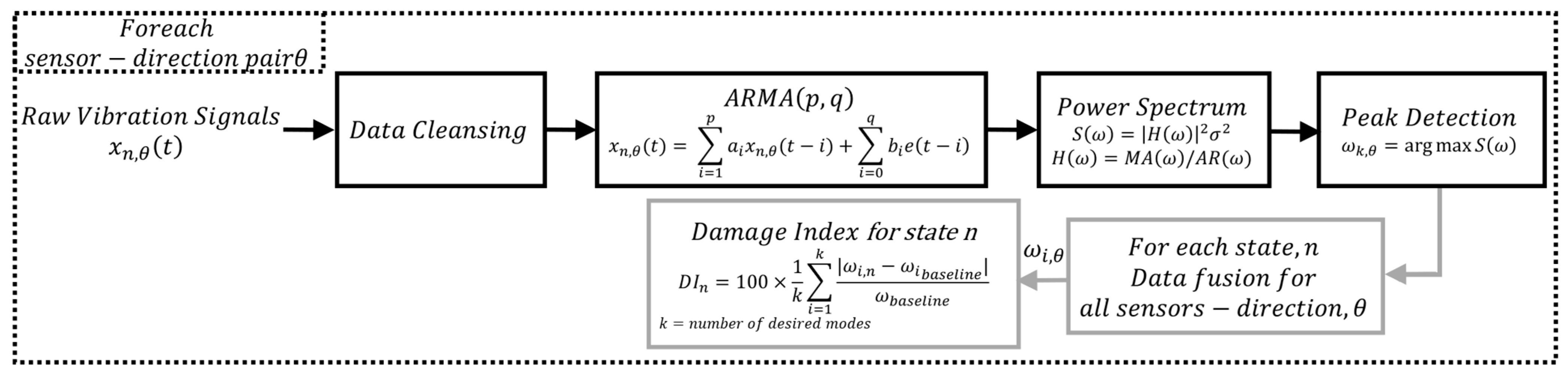
- Conventional ARMA Time-Series Model
- III.
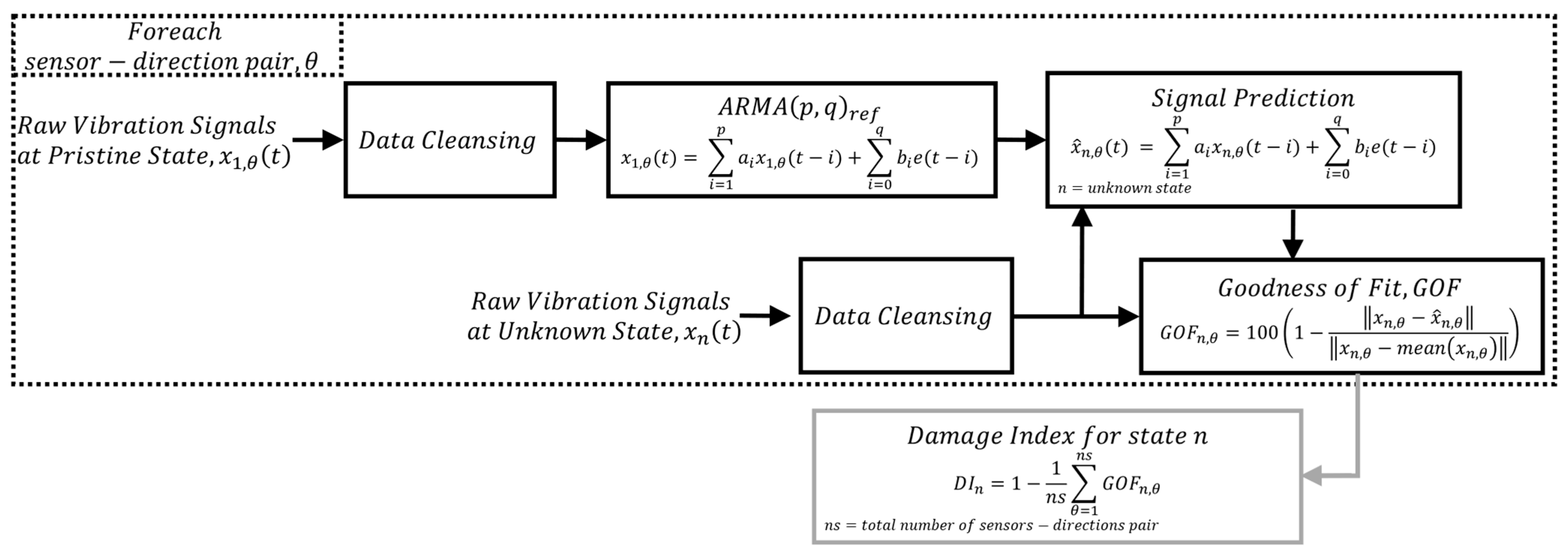
- Damage detection based on ARMA model regression and the new Damage Index (DI)
3. Analysis and Results
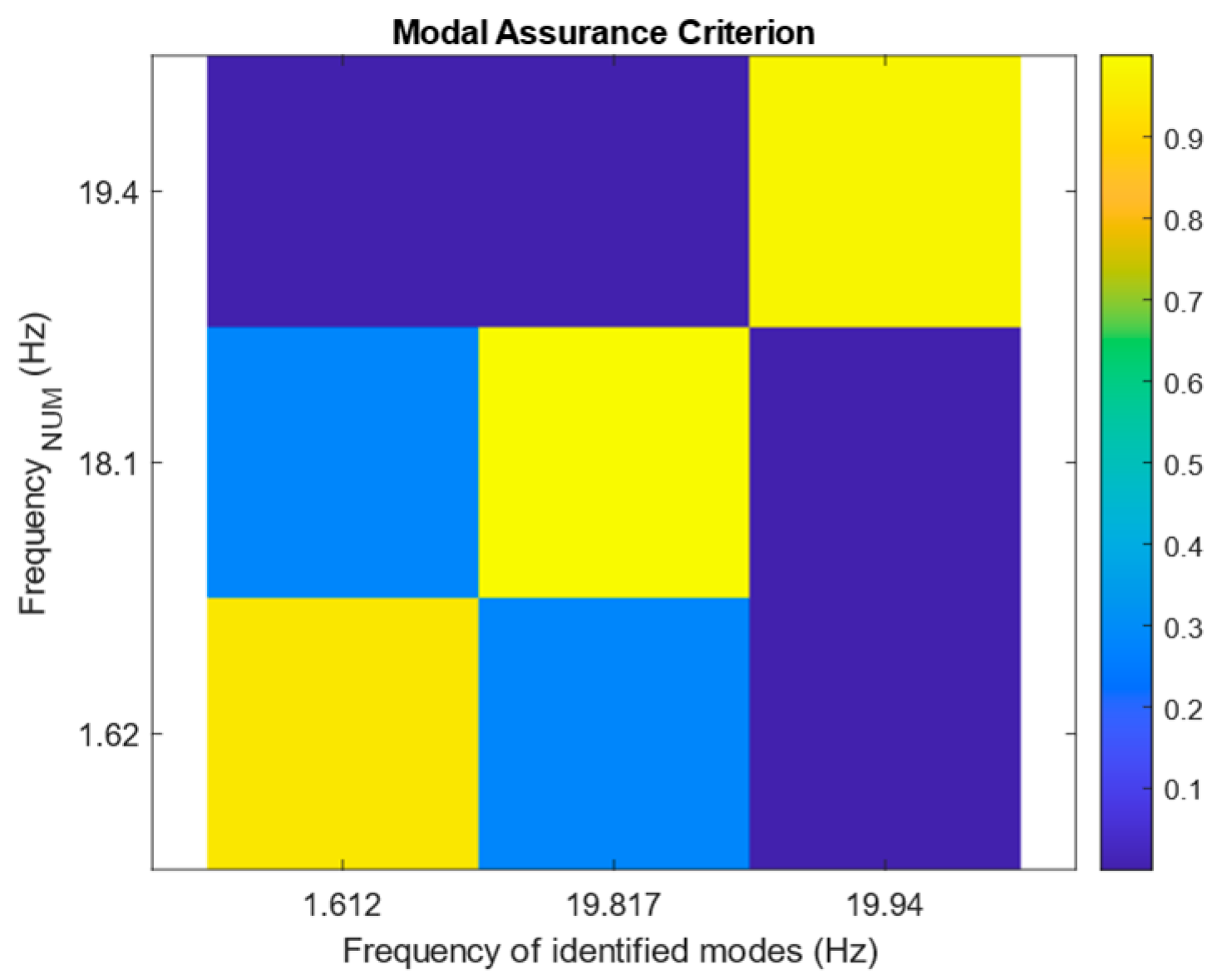
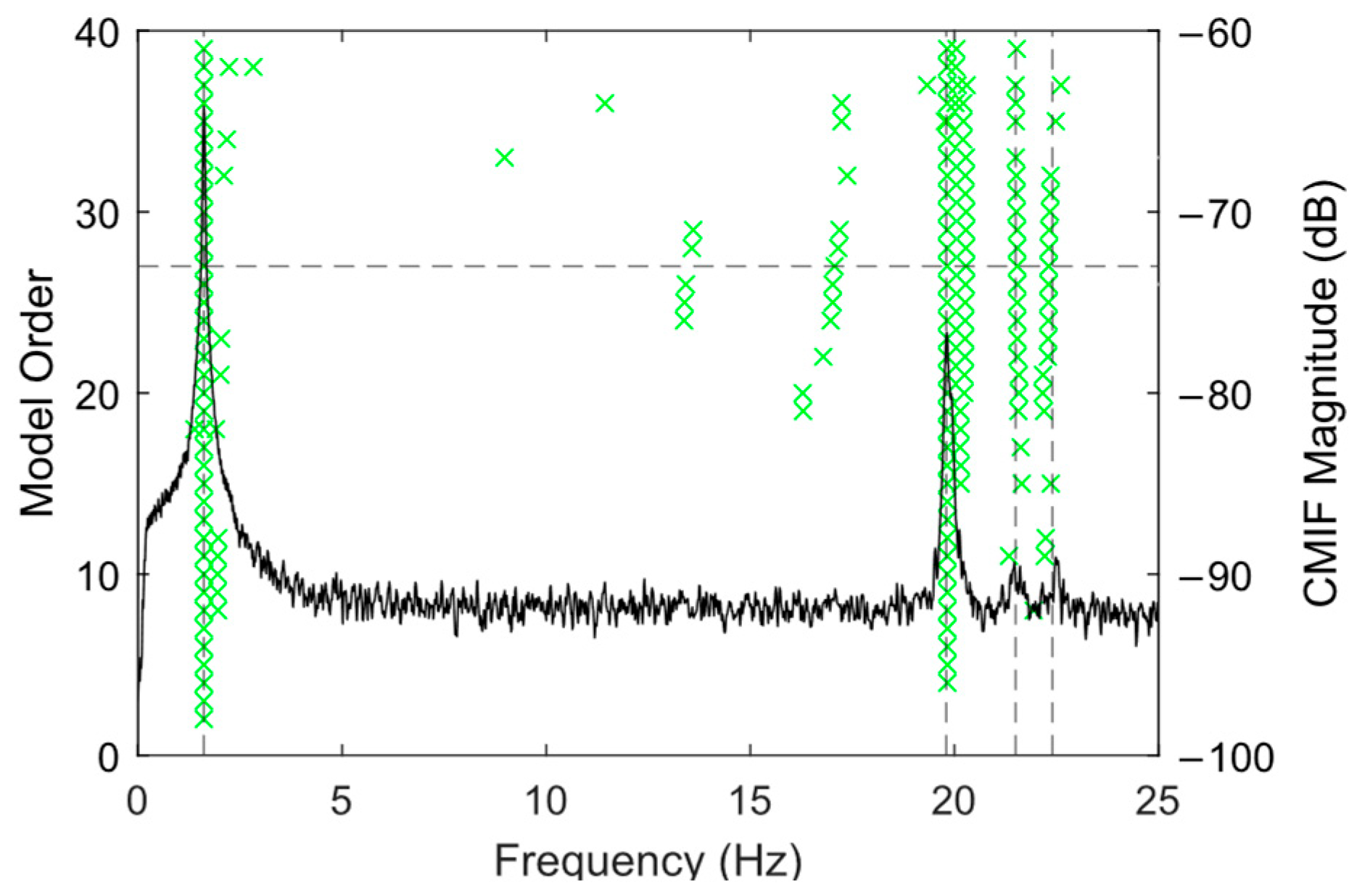
3.1. SSI-COV Results
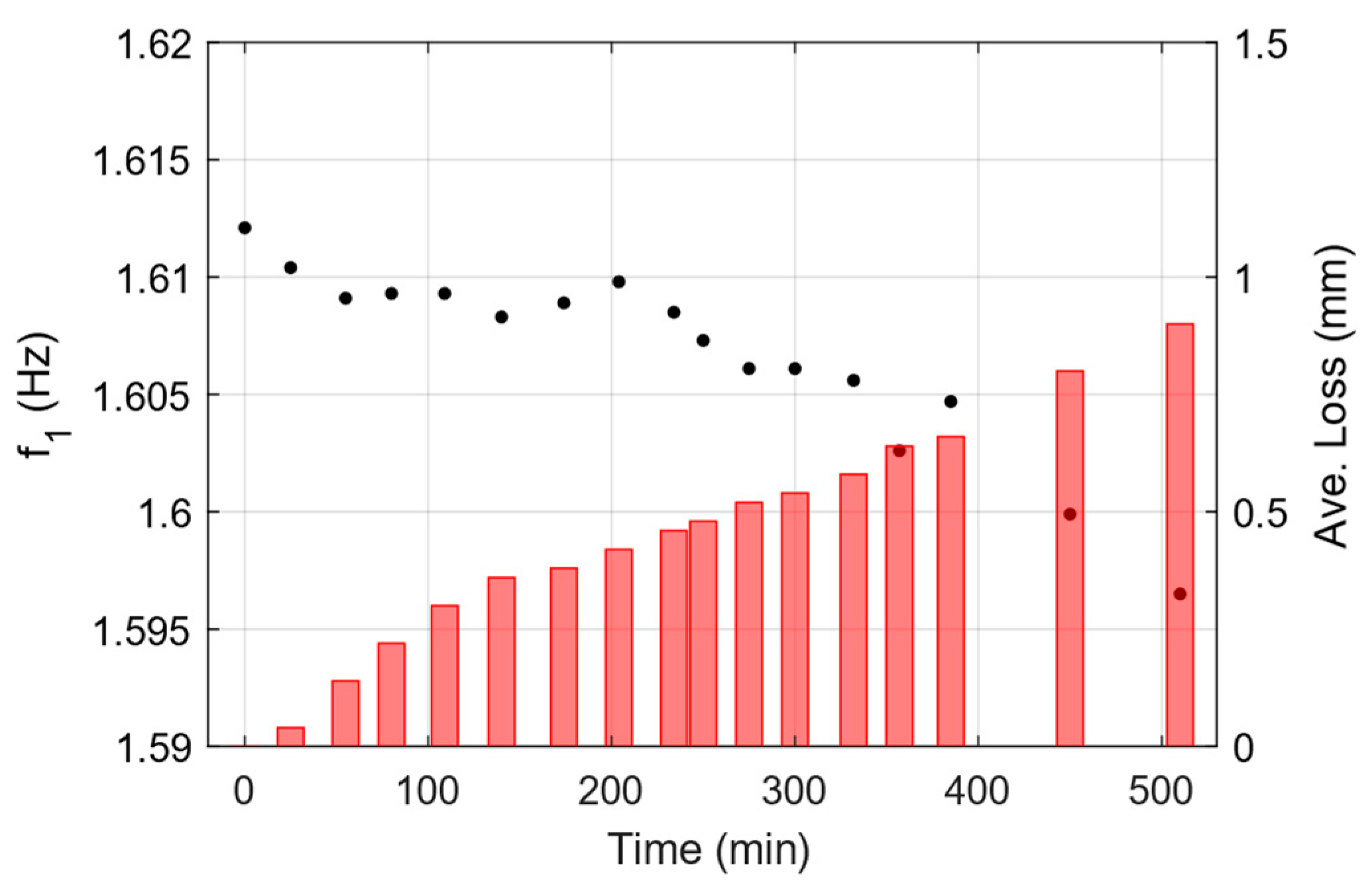
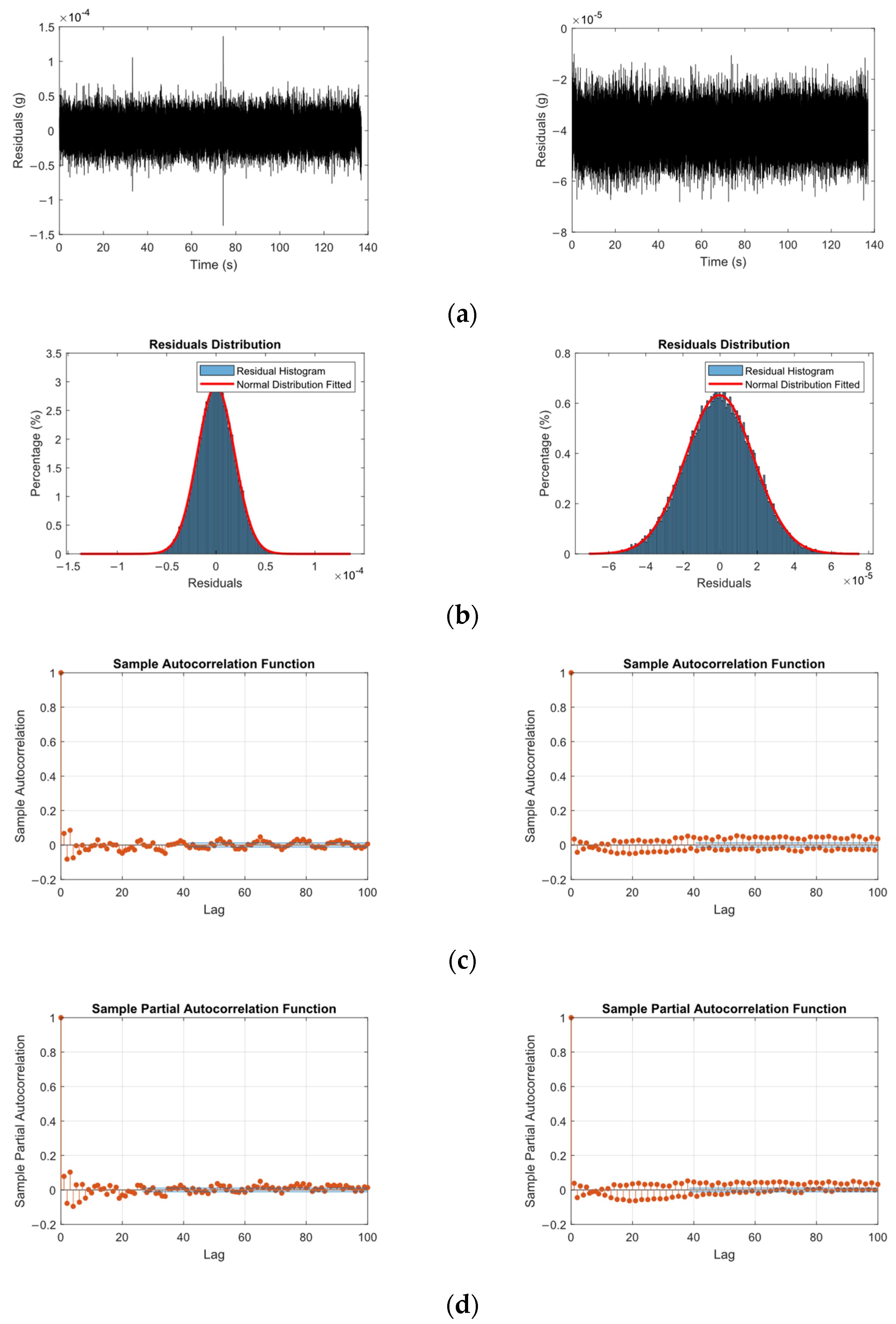
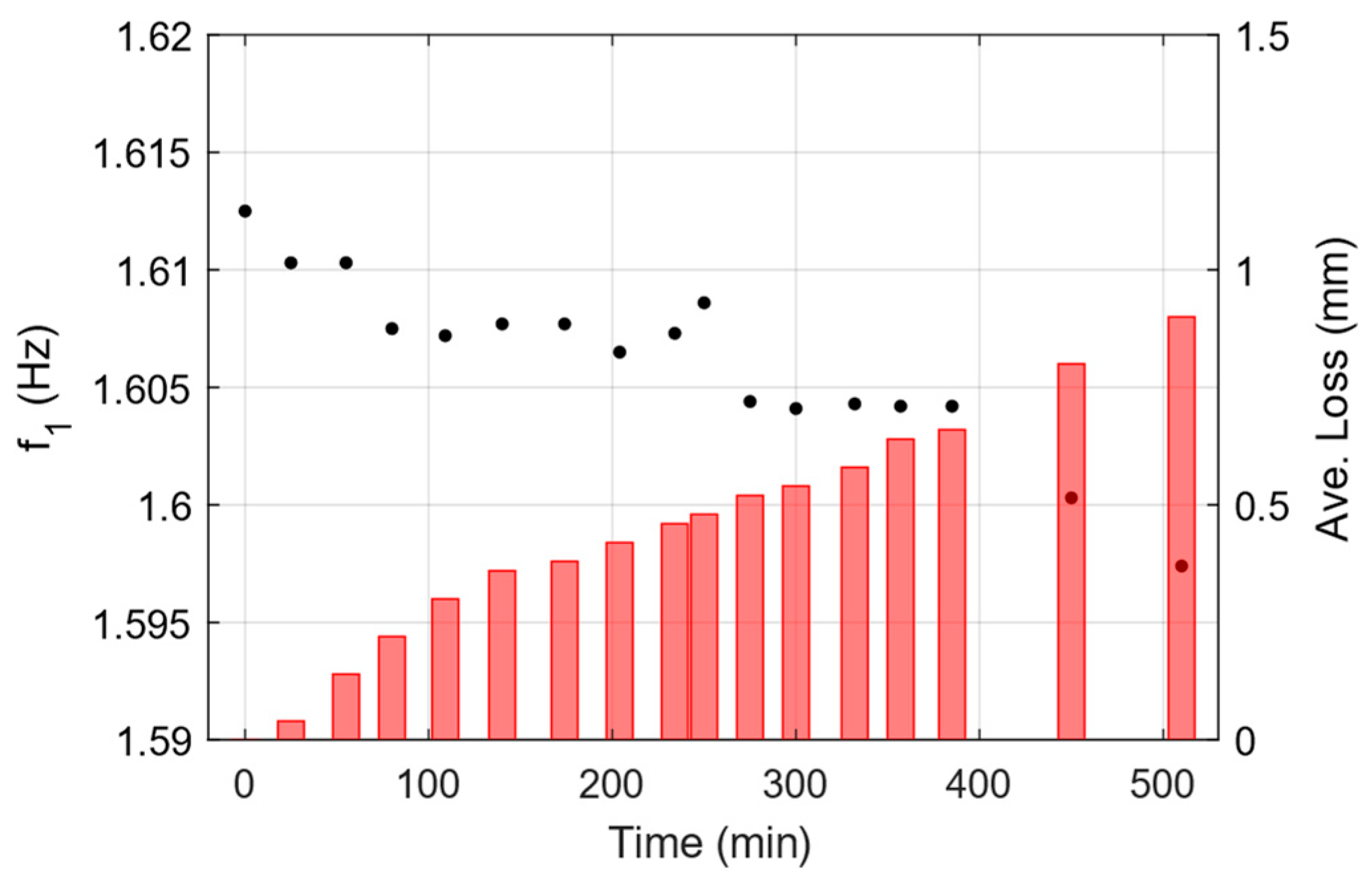
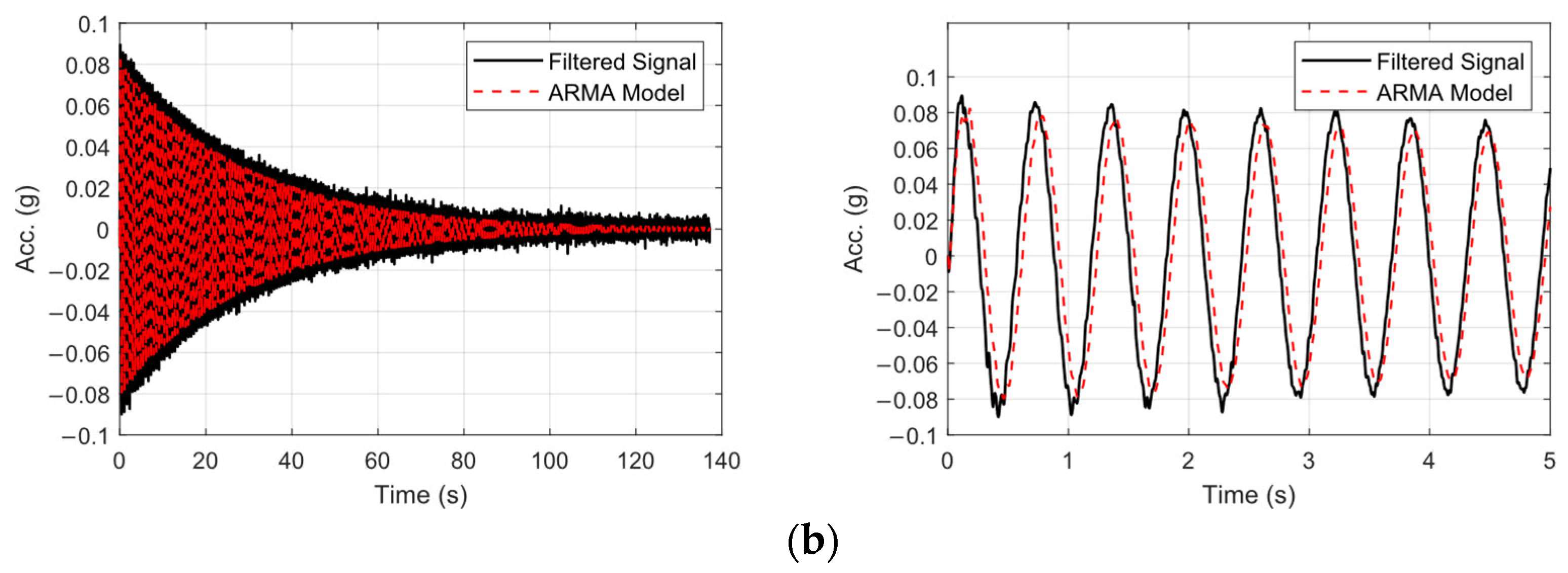
3.2. Conventional ARMA Process for Deterioration Detection
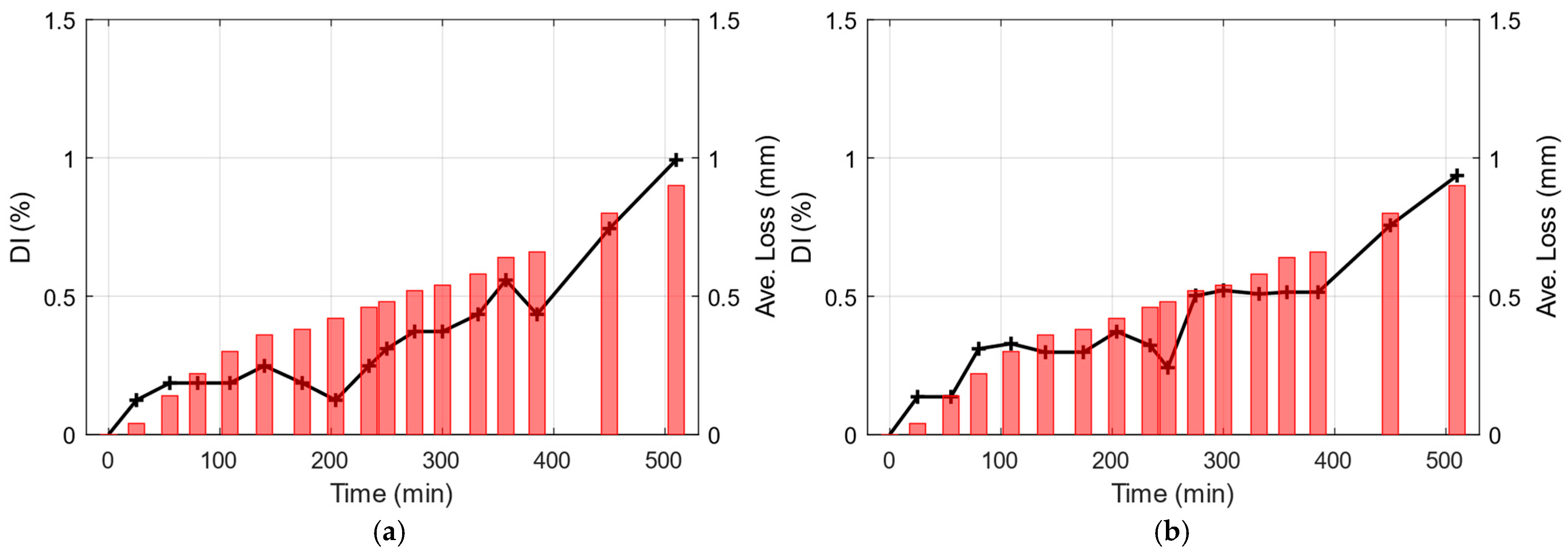
3.3. Damage Detection Based on ARMA Model Regression and the New Damage Index (DI)
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gharehbaghi, V.R.; Noroozinejad Farsangi, E.; Noori, M.; Yang, T.Y.; Li, S.; Nguyen, A.; Málaga-Chuquitaype, C.; Gardoni, P.; Mirjalili, S. A Critical Review on Structural Health Monitoring: Definitions, Methods, and Perspectives. Arch. Comput. Methods Eng. 2021, 29, 2209–2235. [Google Scholar] [CrossRef]
- Zhang, C.; Mousavi, A.A.; Masri, S.F.; Gholipour, G.; Yan, K.; Li, X. Vibration feature extraction using signal processing techniques for structural health monitoring: A review. Mech. Syst. Signal Process. 2022, 177, 109175. [Google Scholar] [CrossRef]
- Monavari, B.; Chan, T.H.T.; Nguyen, A.; Thambiratnam, D.P. Structural Deterioration Detection Using Enhanced Autoregressive Residuals. Int. J. Struct. Stab. Dyn. 2018, 18, 1850160. [Google Scholar] [CrossRef]
- Parker_Lord_Sensing_Technologies. Available online: https://www.microstrain.com/wireless-sensors/G-Link-200 (accessed on 16 September 2024).
- McKenna, F.; Fenves, G.L.; Scott, M.H. Open System for Earthquake Engineering Simulation; University of California: Berkeley, CA, USA, 2000. [Google Scholar]
- Rao, J.; Ratassepp, M.; Lisevych, D.; Caffoor, M.H.; Fan, Z.J.S. On-line corrosion monitoring of plate structures based on guided wave tomography using piezoelectric sensors. Sensors 2017, 17, 2882. [Google Scholar] [CrossRef] [PubMed]
- Zou, F.; Cegla, F.B. High accuracy ultrasonic monitoring of electrochemical processes. Electrochem. Commun. 2017, 82, 134–138. [Google Scholar] [CrossRef]
- Zhang, D.Z.; Gao, X.H.; Du, L.X.; Wang, H.X.; Liu, Z.G.; Yang, N.N.; Misra, R.D. Corrosion behavior of high-strength steel for flexible riser exposed to CO2-saturated saline solution and CO2-saturated vapor environments. Acta Metall. Sin. (Engl. Lett.) 2019, 32, 607–617. [Google Scholar] [CrossRef]
- Peeters, B.; Roeck, G.D. Stochastic System Identification for Operational Modal Analysis: A Review. J. Dyn. Sys. Meas. Control 2001, 123, 659–667. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. Subspace Identification for Linear Systems: Theory—Implementation—Applications; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Box, G.E.; Jenkins, G.M.; Reinsel, G.C.; Ljung, G.M. Time Series Analysis: Forecasting and Control; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Pi, Y.L.; Mickleborough, N.C. Mickleborough Modal identification of vibrating structures using ARMA model. J. Eng. Mech. 1989, 115, 2232–2250. [Google Scholar] [CrossRef]
- Rainieri, C.; Fabbrocino, G. Operational Modal Analysis of Civil Engineering Structures; Springer: New York, NY, USA, 2014; Volume 142, p. 143. [Google Scholar]
- Zheng, H.; Mita, A. Damage indicator defined as the distance between ARMA models for structural health monitoring. Struct. Control Health Monit. 2008, 15, 992–1005. [Google Scholar] [CrossRef]
- Carden, E.P.; Brownjohn, J.M.W. ARMA modelled time-series classification for structural health monitoring of civil infrastructure. Mech. Syst. Signal Process. 2008, 22, 295–314. [Google Scholar] [CrossRef]
- Wyłomańska, A. How to identify the proper model. Acta Phys. Pol. B 2012, 43, 1241–1253. [Google Scholar] [CrossRef]
- Otto, A. OoMA Toolbox. 2025. Available online: https://www.mathworks.com/matlabcentral/fileexchange/68657-ooma-toolbox (accessed on 3 February 2025).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Mode Description | Freq (Hz) |
|---|---|---|
| 1 | 1st flexural | 1.62 |
| 2 | 2nd flexural | 18.10 |
| 3 | 1st Transversal | 19.40 |
| 4 | 3rd flexural | 55.65 |
| State | Time of Test (min) | Thickness @Zones of Measurement (mm) | Avg. Loss | Avg. CR | ||||
|---|---|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5 | (mm) | (mm/h) | ||
| 1 | 0 | 5.0 | 5.0 | 5.0 | 5.0 | 5.0 | 0.00 | - |
| 2 | 25 | 5.0 | 4.9 | 4.9 | 5.0 | 5.0 | 0.04 | 0.096 |
| 3 | 55 | 4.8 | 4.9 | 4.8 | 4.9 | 4.9 | 0.14 | 0.153 |
| 4 | 80 | 4.8 | 4.8 | 4.6 | 4.9 | 4.8 | 0.22 | 0.165 |
| 5 | 109 | 4.7 | 4.7 | 4.5 | 4.9 | 4.7 | 0.30 | 0.165 |
| 6 | 140 | 4.6 | 4.6 | 4.4 | 4.9 | 4.7 | 0.36 | 0.154 |
| 7 | 174 | 4.6 | 4.5 | 4.4 | 4.9 | 4.7 | 0.38 | 0.131 |
| 8 | 204 | 4.5 | 4.5 | 4.3 | 4.9 | 4.7 | 0.42 | 0.124 |
| 9 | 234 | 4.5 | 4.5 | 4.1 | 4.9 | 4.7 | 0.46 | 0.118 |
| 10 | 250 | 4.5 | 4.5 | 4.0 | 4.9 | 4.7 | 0.48 | 0.115 |
| 11 | 275 | 4.4 | 4.4 | 4.0 | 4.9 | 4.7 | 0.52 | 0.113 |
| 12 | 300 | 4.4 | 4.4 | 4.0 | 4.9 | 4.6 | 0.54 | 0.108 |
| 13 | 332 | 4.3 | 4.4 | 3.9 | 4.9 | 4.6 | 0.58 | 0.105 |
| 14 | 357 | 4.3 | 4.3 | 3.7 | 4.9 | 4.6 | 0.64 | 0.108 |
| 15 | 385 | 4.3 | 4.3 | 3.6 | 4.9 | 4.6 | 0.66 | 0.103 |
| 16 | 450 | 4.2 | 3.9 | 3.4 | 4.9 | 4.6 | 0.80 | 0.107 |
| 17 | 510 | 4.0 | 3.8 | 3.2 | 4.9 | 4.6 | 0.90 | 0.106 |
| Sensor 1 (Middle of Beam) | Sensor 2 (Free End of Beam) | ||||||
|---|---|---|---|---|---|---|---|
| ) | (%) | ) | (%) | ||||
| −6.667 | 83.89 | 26 | 36 | −6.694 | 91.645 | 38 | 40 |
| −6.667 | 83.87 | 28 | 42 | −6.693 | 92.022 | 26 | 43 |
| −6.665 | 84.05 | 26 | 41 | −6.693 | 92.119 | 24 | 41 |
| −6.664 | 82.74 | 20 | 41 | −6.689 | 90.847 | 38 | 44 |
| −6.663 | 83.62 | 34 | 36 | −6.683 | 90.369 | 30 | 37 |
| State | SSI-COV | Conv. ARMA Model | ||
|---|---|---|---|---|
| Frequencies (Hz) | Frequencies (Hz) | |||
| Mode 1 | Mode 2 | Mode 1 | Mode 2 | |
| 1 | 1.6121 | 19.817 | 1.6125 | 19.8242 |
| 2 | 1.6104 | 19.896 | 1.6103 | 19.9356 |
| 3 | 1.6091 | 19.947 | 1.6103 | 20.0412 |
| 4 | 1.6093 | 19.841 | 1.6075 | 19.9901 |
| 5 | 1.6093 | 19.899 | 1.6072 | 19.7930 |
| 6 | 1.6083 | 19.849 | 1.6077 | 19.4601 |
| 7 | 1.6089 | 19.910 | 1.6077 | 20.0069 |
| 8 | 1.6098 | 19.880 | 1.6065 | 20.0982 |
| 9 | 1.6085 | 19.840 | 1.6073 | 19.8815 |
| 10 | 1.6073 | 19.912 | 1.6086 | N.A |
| 11 | 1.6061 | 19.860 | 1.6044 | 19.8438 |
| 12 | 1.6061 | 19.940 | 1.6041 | N.A |
| 13 | 1.6056 | 19.866 | 1.6043 | 19.8785 |
| 14 | 1.6026 | 19.833 | 1.6042 | 19.8258 |
| 15 | 1.6047 | 19.844 | 1.6042 | 19.8003 |
| 16 | 1.5999 | 19.791 | 1.6003 | 19.8011 |
| 17 | 1.5965 | 19.778 | 1.5974 | 19.6830 |
| Method | |
|---|---|
| SSI-COV | 0.8991 |
| Conv. ARMA | 0.9374 |
| Proposed Method | 0.9394 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zolfagharysaravi, S.; Bogomolov, D.; Larocca, C.B.; Zonzini, F.; Peppi, L.M.; Lovecchio, M.; De Marchi, L.; Marzani, A. ARMA Model for Tracking Accelerated Corrosion Damage in a Steel Beam. Sensors 2025, 25, 2384. https://doi.org/10.3390/s25082384
Zolfagharysaravi S, Bogomolov D, Larocca CB, Zonzini F, Peppi LM, Lovecchio M, De Marchi L, Marzani A. ARMA Model for Tracking Accelerated Corrosion Damage in a Steel Beam. Sensors. 2025; 25(8):2384. https://doi.org/10.3390/s25082384
Chicago/Turabian StyleZolfagharysaravi, Sina, Denis Bogomolov, Camilla Bahia Larocca, Federica Zonzini, Lorenzo Mistral Peppi, Marco Lovecchio, Luca De Marchi, and Alessandro Marzani. 2025. "ARMA Model for Tracking Accelerated Corrosion Damage in a Steel Beam" Sensors 25, no. 8: 2384. https://doi.org/10.3390/s25082384
APA StyleZolfagharysaravi, S., Bogomolov, D., Larocca, C. B., Zonzini, F., Peppi, L. M., Lovecchio, M., De Marchi, L., & Marzani, A. (2025). ARMA Model for Tracking Accelerated Corrosion Damage in a Steel Beam. Sensors, 25(8), 2384. https://doi.org/10.3390/s25082384