
A Novel Adaptive Non-Singular Fast Terminal Sliding Mode Control for Direct Yaw Moment Control in 4WID Electric Vehicles

Abstract
1. Introduction
- An innovative NFTSMC method for the DYC system: This study introduces a novel NFTSMC-based control framework specifically designed for the DYC system of 4WID EVs. By integrating advanced control strategies, the proposed NFTSMC method achieves a robust and flexible control structure, ensuring enhanced system stability, rapid adaptation to dynamic driving conditions, and the effective mitigation of nonlinearities and disturbances.
- Enhanced convergence and improved yaw rate tracking accuracy: The combination of NFTSMC and the adaptive super-fast reaching control law facilitates high-speed convergence to the sliding surface while maintaining precise yaw rate tracking. This enhancement not only addresses the singularity issues inherent to traditional methods but also ensures superior responsiveness across diverse driving scenarios, including sudden steering inputs.
- Superior chattering mitigation: The proposed adaptive control mechanism dynamically adjusts the sliding gain based on the system state condition within the reaching control law, effectively counteracting nonlinearities and uncertainties introduced by abrupt disturbances in the vehicle’s complex dynamics. This approach minimizes or eliminates chattering in the control input due to external disturbances and system uncertainties, enhancing robustness against system parameter variations and improving overall control performance to ensure safe and stable operation.
- Eliminating prior knowledge of disturbance: Accurately determining the upper boundary is challenging in real-world applications. This adaptive sliding gain dynamically changes based on the state of the sliding surface, thereby enhancing system performance by eliminating the need for precise knowledge of the upper boundary of uncertainties. This approach improves the practical applicability of the control strategy and simplifies its implementation in real-world driving environments.
- Rigorous theoretical stability verification using Lyapunov theory: The stability of the proposed NFTSMC method was rigorously validated using Lyapunov theory, providing a solid theoretical foundation for its robustness and reliability.
- Comprehensive validation: Extensive simulations were performed using CarSim and Matlab under various driving scenarios. The results demonstrate significant improvements in tracking accuracy and convergence speed and a substantial reduction in control signal chattering, validating the effectiveness of the proposed control strategy.
2. Problem Statement
2.1. Description of Vehicle Dynamic Model
- The two front wheels share an identical steering angle.
- All tires have zero camber angles.
- Tire self-alignment moments are considered negligible.
- The roll axis inclination angle relative to the horizontal is minimal and not essential.
- Additional steering angles due to compliance and roll steer effects are negligible.
- All products of inertia are neglected.
- Longitudinal motion:
- Lateral motion:
- Yaw motion:
2.2. Problem Formulation
3. Design of Control System
3.1. Reference Model
3.2. Upper Level Controller
3.2.1. Design of the Non-Singular Fast Terminal SMC
3.2.2. Design of Novel Adaptive Non-Singular Fast Terminal SMC
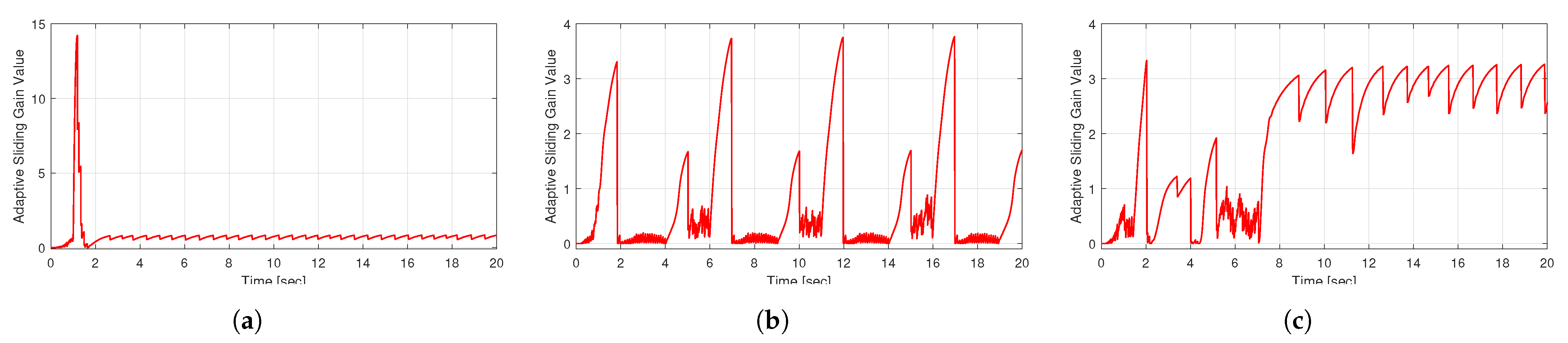
- When exceeds the threshold value υ, the sliding gain rapidly increases. This ensures a sufficient control effort to drive s toward the sliding surface, enabling quick convergence to a region where .
- Once enters this smaller region (indicating minimal error), the adaptive rule gradually decreases , reducing unnecessary control efforts. This mitigates the high-frequency switching typical in fixed-gain sliding mode controllers, significantly reducing chattering and enhancing system performance.
- : Increasing these parameters enhances the system’s robustness to uncertainties and external disturbances while improving its convergence properties.
- p and : Larger values of these parameters enable faster stabilization when the system state exceeds a predefined threshold, accelerating the convergence process. This adjustment is particularly effective in handling large deviations.
- q and : These parameters primarily affect the system’s behavior when the state remains close to the equilibrium point (i.e., within a small bound). Adjusting them can improve precision and fine-tune the system’s control performance to near the desired state.
- υ: The threshold for the adaptive parameter plays a critical role in balancing stability and responsiveness:
- –
- A higher υ reduces sensitivity to minor state changes, minimizing chattering and enhancing robustness against noise. However, it may result in slower response times and reduced precision.
- –
- A lower υ increases responsiveness and accuracy but can make the system more sensitive to disturbances or noise.
For systems subject to high noise or frequent disturbances, a higher υ is preferable to avoid overreactive adjustments. In contrast, systems requiring rapid responses benefit from a lower υ, which facilitates quicker adaptation. - ρ: This parameter inversely affects the adaptation rate of . Smaller ρ values increase the system’s responsiveness to larger deviations, potentially accelerating the convergence process, while larger ρ values slow the rate of adaptation, improving stability and noise tolerance.
3.2.3. Stability Verification of Proposed Controller
- When :For and , it can be shown that:where and .
- When :For and , the inequality similarly holds:
3.3. Lower-Level Controller
4. Simulation Results and Analysis
4.1. Simulation Environment
4.2. Simulation Results
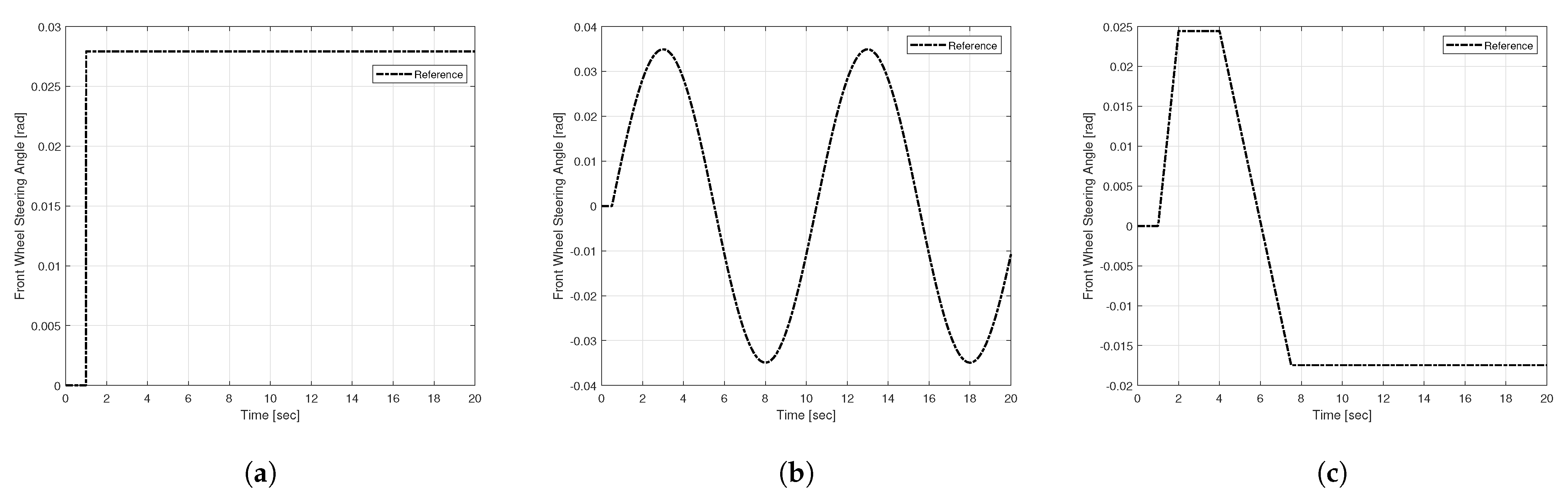
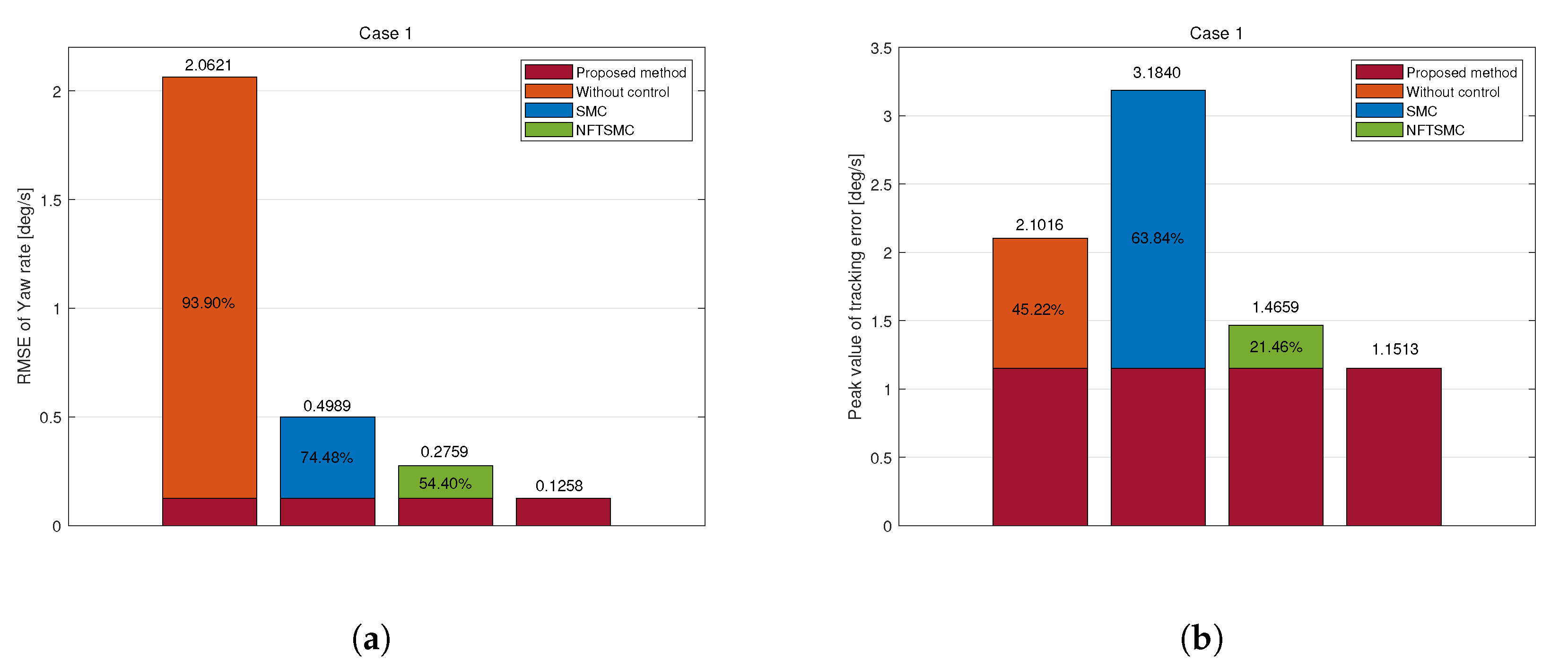
4.2.1. Case 1—Step Input Maneuver
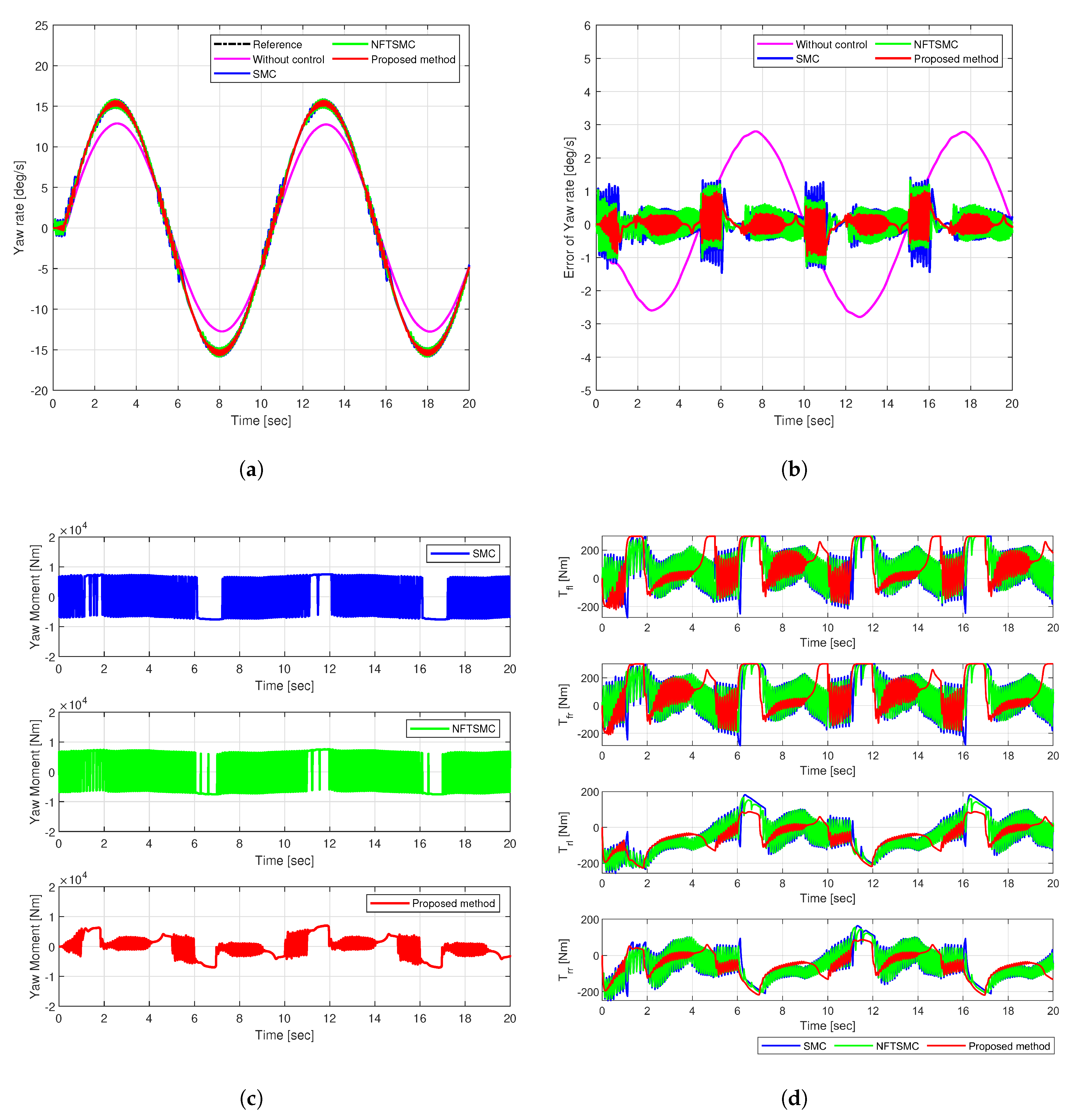
4.2.2. Case 2—Sine Input Maneuver
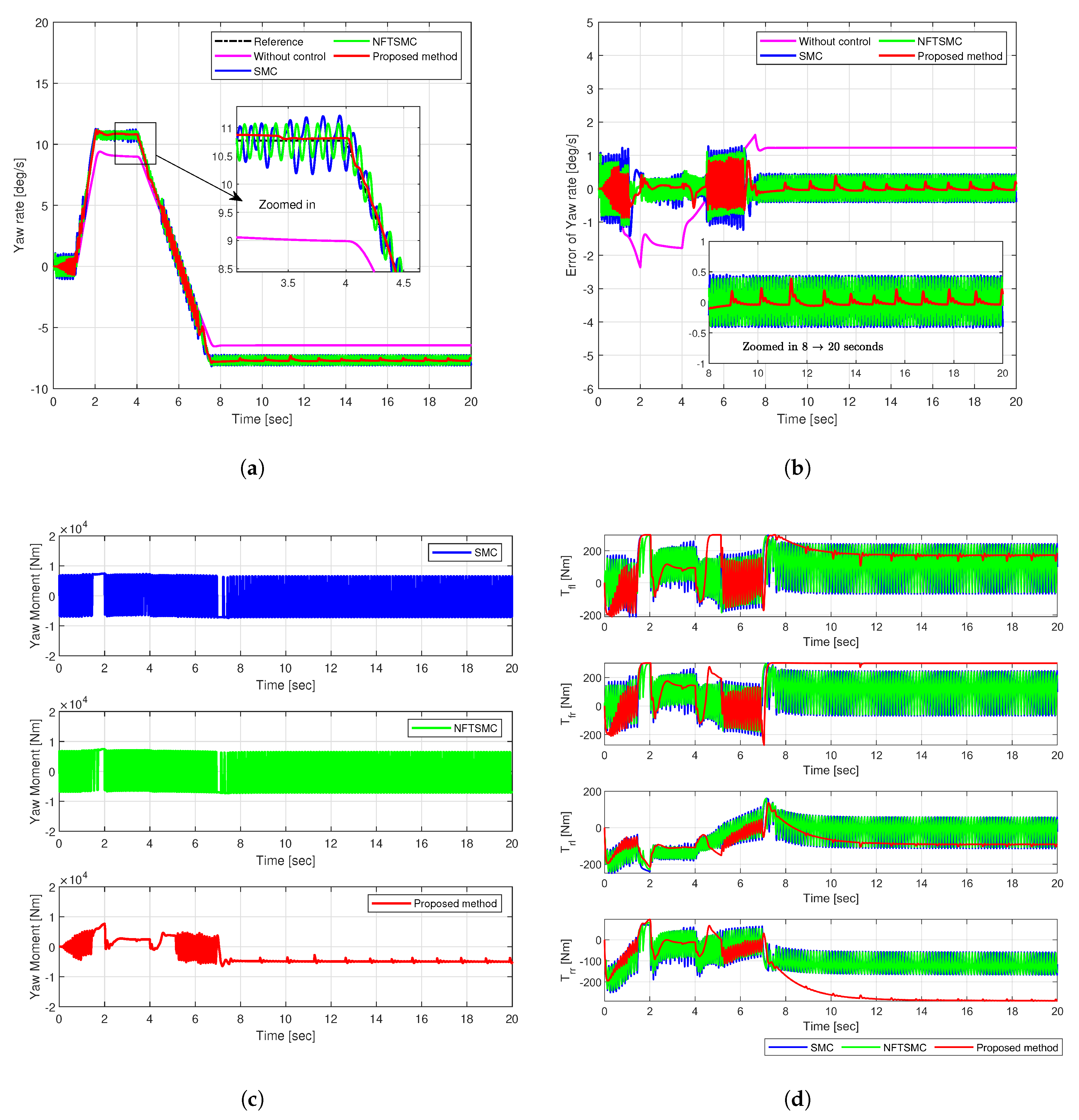
4.2.3. Case 3—Fish-Hook Input Maneuver
4.2.4. Overall Performance Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Park, J.Y.; Na, S.; Cha, H.; Yi, K. Direct yaw moment control with 4WD torque-vectoring for vehicle handling stability and agility. Int. J. Automot. Technol. 2022, 23, 555–565. [Google Scholar] [CrossRef]
- Lee, J.E.; Kim, B.W. Improving Direct Yaw-Moment Control via Neural-Network-Based Non-Singular Fast Terminal Sliding Mode Control for Electric Vehicles. Sensors 2024, 24, 4079. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Zhang, J.; Ma, R.; He, C. Cascade-Free Predictive Wheel Slip Control with Discrete-Valued Inputs for Automotive Hydraulic Anti-lock Braking Systems. IEEE Trans. Transp. Electrif. 2024. [Google Scholar] [CrossRef]
- Diao, X.; Jin, Y.; Ma, L.; Ding, S.; Jiang, H. Composite active front steering controller design for vehicle system. IEEE Access 2017, 5, 6697–6706. [Google Scholar] [CrossRef]
- Lee, J.; Kim, G.; Kim, B. Study on the improvement of a collision avoidance system for curves. Appl. Sci. 2019, 9, 5380. [Google Scholar] [CrossRef]
- Lee, J.; Kim, G.; Kim, B. Study on AEB performance improvement on curved road based on curvilinear coordinate system. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 65–68. [Google Scholar]
- Lee, J.E.; Kim, B.W. Research on Direct Yaw Moment Control Based on Neural Sliding Mode Control for Four-Wheel Actuated Electric Vehicles. In Proceedings of the 2023 IEEE 6th International Conference on Knowledge Innovation and Invention (ICKII), Sapporo, Japan, 11–13 August 2023; pp. 736–740. [Google Scholar]
- Wei, Z.; Guizhen, Y.; Jian, W.; Tianshu, S.; Xiangyang, X. Self-tuning fuzzy PID applied to direct yaw moment control for vehicle stability. In Proceedings of the 2009 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 2–257. [Google Scholar]
- Sun, X.; Wang, Y.; Cai, Y.; Wong, P.K.; Chen, L.; Bei, S. Nonsingular terminal sliding mode-based direct yaw moment control for four-wheel independently actuated autonomous vehicles. IEEE Trans. Transp. Electrif. 2022, 9, 2568–2582. [Google Scholar] [CrossRef]
- Medina, A.; Bistue, G.; Rubio, A. Comparison of typical controllers for direct yaw moment control applied on an electric race car. Vehicles 2021, 3, 127–144. [Google Scholar] [CrossRef]
- Wang, Q.; Zhuang, Y.; Wei, J.; Guo, K. A driver model–based direct yaw moment controller for in-wheel motor electric vehicles. Adv. Mech. Eng. 2019, 11, 1687814019877319. [Google Scholar] [CrossRef]
- De Novellis, L.; Sorniotti, A.; Gruber, P.; Orus, J.; Fortun, J.M.R.; Theunissen, J.; De Smet, J. Direct yaw moment control actuated through electric drivetrains and friction brakes: Theoretical design and experimental assessment. Mechatronics 2015, 26, 1–15. [Google Scholar] [CrossRef]
- Omar, M.F.; Saadon, I.M.; Ghazali, R.; Aripin, M.K.; Soon, C.C. Optimal direct yaw control for sport utility vehicle using PSO. In Proceedings of the 2018 9th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 3–4 August 2018; pp. 211–216. [Google Scholar]
- Xie, X.; Jin, L.; Baicang, G.; Shi, J. Vehicle direct yaw moment control system based on the improved linear quadratic regulator. Ind. Robot. Int. J. Robot. Res. Appl. 2021, 48, 378–387. [Google Scholar] [CrossRef]
- Liu, H.; Yan, S.; Shen, Y.; Li, C.; Zhang, Y.; Hussain, F. Model predictive control system based on direct yaw moment control for 4WID self-steering agriculture vehicle. Int. J. Agric. Biol. Eng. 2021, 14, 175–181. [Google Scholar] [CrossRef]
- Jin, L.; Zhou, H.; Xie, X.; Guo, B.; Ma, X. A direct yaw moment control frame through model predictive control considering vehicle trajectory tracking performance and handling stability for autonomous driving. Control Eng. Pract. 2024, 148, 105947. [Google Scholar] [CrossRef]
- Truong, T.N.; Kang, H.J.; Le, T.D. Adaptive neural sliding mode control for 3-DOF planar parallel manipulators. In Proceedings of the 2019 3rd International Symposium on Computer Science and Intelligent Control, Amsterdam, The Netherlands, 25–27 September 2019; pp. 1–6. [Google Scholar]
- Vo, A.T.; Truong, T.N.; Kang, H.J. A novel prescribed-performance-tracking control system with finite-time convergence stability for uncertain robotic manipulators. Sensors 2022, 22, 2615. [Google Scholar] [CrossRef] [PubMed]
- Truong, T.N.; Vo, A.T.; Kang, H.J. Neural network-based sliding mode controllers applied to robot manipulators: A review. Neurocomputing 2023, 562, 126896. [Google Scholar] [CrossRef]
- Nguyen Truong, T.; Tuan Vo, A.; Kang, H.J.; Le, T.D. A neural terminal sliding mode control for tracking control of robotic manipulators in uncertain dynamical environments. In Proceedings of the International Conference on Intelligent Computing, Shenzhen, China, 12–15 August 2021; pp. 207–221. [Google Scholar]
- Truong, T.N.; Vo, A.T.; Kang, H.J. Real-time implementation of the prescribed performance tracking control for magnetic levitation systems. Sensors 2022, 22, 9132. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H.J. A Novel Time Delay Nonsingular Fast Terminal Sliding Mode Control for Robot Manipulators with Input Saturation. Mathematics 2024, 13, 119. [Google Scholar] [CrossRef]
- Ma, L.; Mei, K.; Ding, S. Direct yaw-moment control design for in-wheel electric vehicle with composite terminal sliding mode. Nonlinear Dyn. 2023, 111, 17141–17156. [Google Scholar] [CrossRef]
- Ianagui, A.S.; Tannuri, E.A. High order sliding mode control and observation for DP systems. IFAC-PapersOnLine 2018, 51, 110–115. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H.J. A model-free terminal sliding mode control for robots: Achieving fixed-time prescribed performance and convergence. ISA Trans. 2024, 144, 330–341. [Google Scholar] [CrossRef]
- Sawaqed, L.S.; Rabbaa, I.H. Fuzzy Yaw Rate and Sideslip Angle Direct Yaw Moment Control for Student Electric Racing Vehicle with Independent Motors. World Electr. Veh. J. 2022, 13, 109. [Google Scholar] [CrossRef]
- Song, Q.; Li, Y.; Jia, C. A novel direct torque control method based on asymmetric boundary layer sliding mode control for PMSM. Energies 2018, 11, 657. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, S.; Li, F.; Zhao, J. Integrated nonlinear robust adaptive control for active front steering and direct yaw moment control systems with uncertainty observer. Trans. Inst. Meas. Control 2020, 42, 3267–3280. [Google Scholar] [CrossRef]
- Yang, X.; Wang, Q.; Hu, J.; Xu, B.; Ding, S.; Xiang, Z.; Zhang, B. Fixed-Time Generalized Super-Twisting Controller for the Trajectory Tracking of Unmanned Surface Vehicles in Autonomous Berthing. IEEE Trans. Ind. Electron. 2024. [Google Scholar] [CrossRef]
- Lee, J.; Chang, P.H.; Jin, M. Adaptive integral sliding mode control with time-delay estimation for robot manipulators. IEEE Trans. Ind. Electron. 2017, 64, 6796–6804. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, Y.; Zhang, O.; Chen, W.; Wang, J.; Gao, Y.; Liu, J. A novel faster fixed-time adaptive control for robotic systems with input saturation. IEEE Trans. Ind. Electron. 2023, 71, 5215–5223. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2011, 57, 2106–2110. [Google Scholar] [CrossRef]
- Basin, M.; Shtessel, Y.; Aldukali, F. Continuous finite-and fixed-time high-order regulators. J. Frankl. Inst. 2016, 353, 5001–5012. [Google Scholar] [CrossRef]
- Vo, A.T.; Nguyen Truong, T.; Kang, H.J.; An Nguyen, N.H. Model-Free Sliding Mode Control Using Time-Delay Estimation and Adaptive Technique Applied to Manipulators. In Proceedings of the 2024 17th International Workshop on Variable Structure Systems (VSS), Abu Dhabi, United Arab Emirates, 21–24 October 2024; pp. 125–129. [Google Scholar]
- Wang, F.; Lai, G. Fixed-time control design for nonlinear uncertain systems via adaptive method. Syst. Control Lett. 2020, 140, 104704. [Google Scholar] [CrossRef]
- Tian, Y.; Cao, X.; Wang, X.; Zhao, Y. Four wheel independent drive electric vehicle lateral stability control strategy. IEEE/CAA J. Autom. Sin. 2020, 7, 1542–1554. [Google Scholar] [CrossRef]
- Lin, J.; Zou, T.; Zhang, F.; Zhang, Y. Yaw stability research of the distributed drive electric bus by adaptive fuzzy sliding mode control. Energies 2022, 15, 1280. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Unit | Symbol | Value |
|---|---|---|---|
| Vehicle Mass | m | 1134 | |
| Wheelbase Length | L | 2600 | |
| CoG to Front Axle Distance | 1040 | ||
| CoG to Rear Axle Distance | 1560 | ||
| Front Track Width | 1485 | ||
| Rear Track Width | 1485 | ||
| Wheel Radius | R | 1485 | |
| Yaw Moment of Inertia | 1343.1 |
| Method | Case1 | Case2 | Case3 | |||
|---|---|---|---|---|---|---|
| Reduction Rate | Reduction Rate | Reduction Rate | ||||
| Propose method | 0.1258 | − | 0.2602 | − | 0.2176 | − |
| Without control | 2.0621 | 1.8822 | 1.2209 | |||
| SMC | 0.4989 | 0.4642 | 0.4181 | |||
| NFTSMC | 0.2759 | 0.3847 | 0.3408 | |||
| Method | Case1 | Case2 | Case3 | |||
|---|---|---|---|---|---|---|
| Reduction Rate | Reduction Rate | Reduction Rate | ||||
| Propose method | 1.1513 | − | 0.9943 | − | 0.9377 | − |
| Without control | 2.1016 | 2.8010 | 2.3583 | |||
| SMC | 3.1840 | 1.4623 | 1.4146 | |||
| NFTSMC | 1.4659 | 1.3145 | 1.2143 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.E.; Kim, B.W. A Novel Adaptive Non-Singular Fast Terminal Sliding Mode Control for Direct Yaw Moment Control in 4WID Electric Vehicles. Sensors 2025, 25, 941. https://doi.org/10.3390/s25030941
Lee JE, Kim BW. A Novel Adaptive Non-Singular Fast Terminal Sliding Mode Control for Direct Yaw Moment Control in 4WID Electric Vehicles. Sensors. 2025; 25(3):941. https://doi.org/10.3390/s25030941
Chicago/Turabian StyleLee, Jung Eun, and Byeong Woo Kim. 2025. "A Novel Adaptive Non-Singular Fast Terminal Sliding Mode Control for Direct Yaw Moment Control in 4WID Electric Vehicles" Sensors 25, no. 3: 941. https://doi.org/10.3390/s25030941
APA StyleLee, J. E., & Kim, B. W. (2025). A Novel Adaptive Non-Singular Fast Terminal Sliding Mode Control for Direct Yaw Moment Control in 4WID Electric Vehicles. Sensors, 25(3), 941. https://doi.org/10.3390/s25030941