
LIRRN: Location-Independent Relative Radiometric Normalization of Bitemporal Remote-Sensing Images

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Materials and Methods
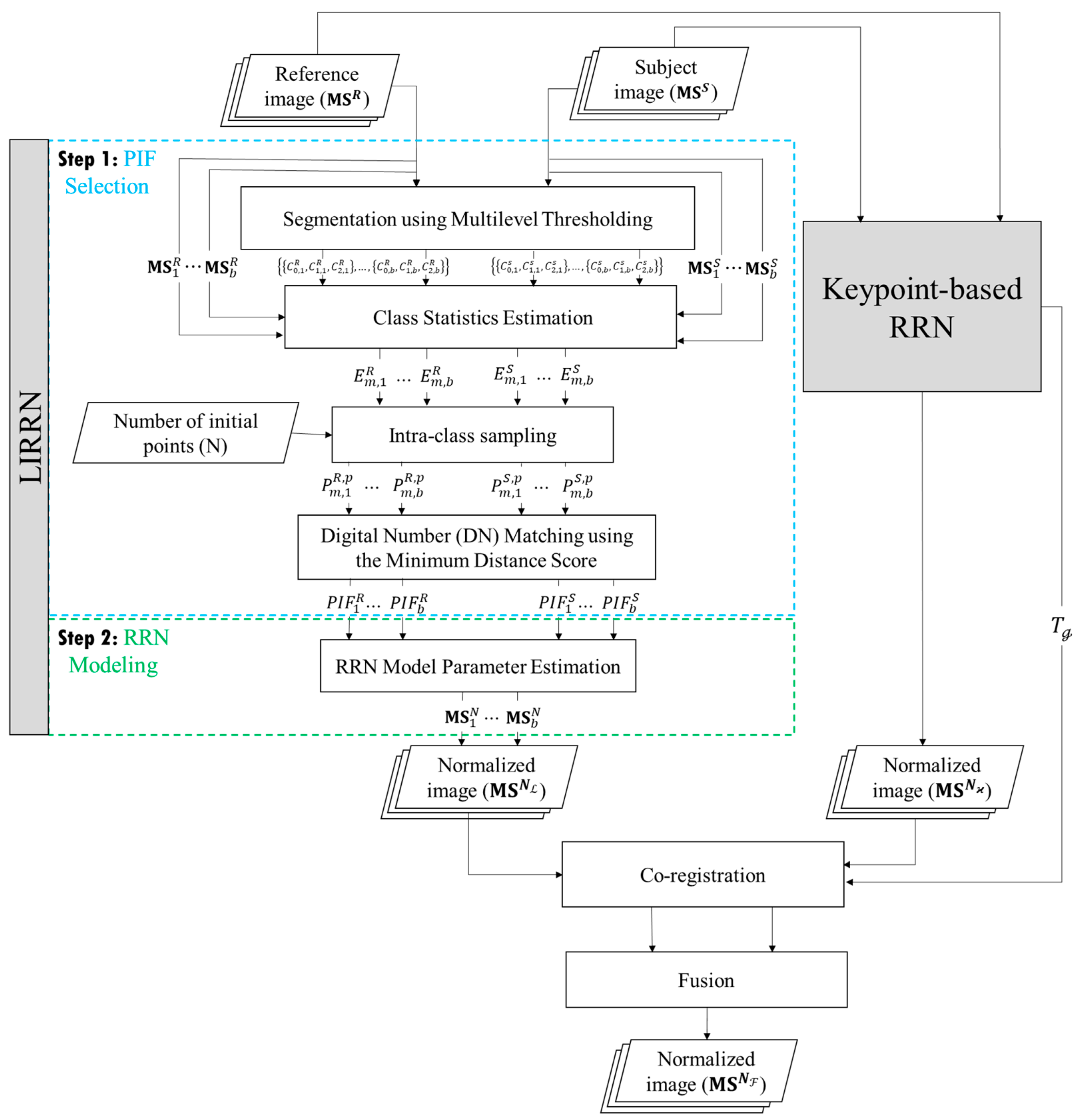
2.1. Methodology
2.1.1. PIF Selection
2.1.2. RRN Modeling
| Algorithm 1 Location-independent Relative Radiometric Normalization (LIRRN) |
| Require: (Reference image), (Subject image), N (Number of initial points, default = 1000) |
| Ensure: (Normalized subject image) |
| 1: for to b do ▷ Loop on the number of bands, i.e., b |
| 2: |
| 3: for to 2 do ▷ Loop on the number of classes |
| 4: |
| 5: |
| 6: , and ▷ Equation (4) |
| 7: and Equation (5) |
| 8: |
| 9: |
| 10: for to do Loop on the number of randomly selected points |
| 11: |
| 12: extract the row and of in |
| 13: |
| 14: |
| 15: remove the element from |
| 16: end for |
| 17: Gather values from sets |
| 18: end for |
| 19: using and in Equations (7) and (8) |
| 20: |
| 21: end for |
| 22: return |
2.2. Fusion of LIRRN and Keypoint-Based RRN
2.3. Data
2.4. Evaluation Criteria
3. Experimental Results
3.1. Experimental Setup
3.2. Comparative Results of the SRRN Methods
3.3. The Impact of the Proposed Fusion-Based Strategy on Unsupervised Change Detection
3.4. The Impacts of the Angle and Scale on the Performance of the LIRRN
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hall, F.G.; Strebel, D.E.; Nickeson, J.E.; Goetz, S.J. Radiometric Rectification: Toward a Common Radiometric Response among Multidate, Multisensor Images. Remote Sens. Environ. 1991, 35, 11–27. [Google Scholar] [CrossRef]
- Yang, X.; Lo, C.P. Relative Radiometric Normalization Performance for Change Detection from Multi-Date Satellite Images. Photogramm. Eng. Remote Sensing 2000, 66, 967–980. [Google Scholar]
- Elvidge, C.D.; Ding, Y.; Weerackoon, R.D.; Lunetta, R.S. Relative Radiometric Normalization of Landsat Multispectral Scanner (MSS) Data Using an Automatic Scattergram-Controlled Regression. Photogramm. Eng. Remote Sens. 1995, 11–22. [Google Scholar]
- Roy, D.P.; Ju, J.; Lewis, P.; Schaaf, C.; Gao, F.; Hansen, M.; Lindquist, E. Multi-Temporal MODIS–Landsat Data Fusion for Relative Radiometric Normalization, Gap Filling, and Prediction of Landsat Data. Remote Sens. Environ. 2008, 112, 3112–3130. [Google Scholar] [CrossRef]
- Yuan, D.; Elvidge, C.D. Comparison of Relative Radiometric Normalization Techniques. ISPRS J. Photogramm. Remote Sens. 1996, 51, 117–126. [Google Scholar] [CrossRef]
- Moghimi, A.; Mohammadzadeh, A.; Celik, T.; Amani, M. A Novel Radiometric Control Set Sample Selection Strategy for Relative Radiometric Normalization of Multitemporal Satellite Images. IEEE Trans. Geosci. Remote Sens. 2020, 59, 2503–2519. [Google Scholar] [CrossRef]
- Xu, H.; Wei, Y.; Li, X.; Zhao, Y.; Cheng, Q. A Novel Automatic Method on Pseudo-Invariant Features Extraction for Enhancing the Relative Radiometric Normalization of High-Resolution Images. Int. J. Remote Sens. 2021, 42, 6153–6183. [Google Scholar] [CrossRef]
- Richards, J.A.; Jia, X. Remote Sensing Digital Image Analysis; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Li, X.; Feng, R.; Guan, X.; Shen, H.; Zhang, L. Remote Sensing Image Mosaicking: Achievements and Challenges. IEEE Geosci. Remote Sens. Mag. 2019, 7, 8–22. [Google Scholar] [CrossRef]
- Chen, L.; Ma, Y.; Lian, Y.; Zhang, H.; Yu, Y.; Lin, Y. Radiometric Normalization Using a Pseudo−Invariant Polygon Features−Based Algorithm with Contemporaneous Sentinel− 2A and Landsat− 8 OLI Imagery. Appl. Sci. 2023, 13, 2525. [Google Scholar] [CrossRef]
- Xu, H.; Zhou, Y.; Wei, Y.; Guo, H.; Li, X. A Multi-Rule-Based Relative Radiometric Normalization for Multi-Sensor Satellite Images. IEEE Geosci. Remote Sens. Lett. 2023, 20, 5002105. [Google Scholar] [CrossRef]
- Canty, M.J.; Nielsen, A.A.; Schmidt, M. Automatic Radiometric Normalization of Multitemporal Satellite Imagery. Remote Sens. Environ. 2004, 91, 441–451. [Google Scholar] [CrossRef]
- Canty, M.J.; Nielsen, A.A. Automatic Radiometric Normalization of Multitemporal Satellite Imagery with the Iteratively Re-Weighted MAD Transformation. Remote Sens. Environ. 2008, 112, 1025–1036. [Google Scholar] [CrossRef]
- Denaro, L.G.; Lin, C.H. Hybrid Canonical Correlation Analysis and Regression for Radiometric Normalization of Cross-Sensor Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 976–986. [Google Scholar] [CrossRef]
- Bai, Y.; Tang, P.; Hu, C. KCCA Transformation-Based Radiometric Normalization of Multi-Temporal Satellite Images. Remote Sens. 2018, 10, 432. [Google Scholar] [CrossRef]
- Hajj, M.E.; Bégué, A.; Lafrance, B.; Hagolle, O.; Dedieu, G.; Rumeau, M. Relative Radiometric Normalization and Atmospheric Correction of a SPOT 5 Time Series. Sensors 2008, 8, 2774–2791. [Google Scholar] [CrossRef] [PubMed]
- Zeng, T.; Shi, L.; Huang, L.; Zhang, Y.; Zhu, H.; Yang, X. A Color Matching Method for Mosaic HY-1 Satellite Images in Antarctica. Remote Sens. 2023, 15, 4399. [Google Scholar] [CrossRef]
- Syariz, M.A.; Lin, B.Y.; Denaro, L.G.; Jaelani, L.M.; Van Nguyen, M.; Lin, C.H. Spectral-Consistent Relative Radiometric Normalization for Multitemporal Landsat 8 Imagery. ISPRS J. Photogramm. Remote Sens. 2019, 147, 56–64. [Google Scholar] [CrossRef]
- Moghimi, A.; Sarmadian, A.; Mohammadzadeh, A.; Celik, T.; Amani, M.; Kusetogullari, H. Distortion Robust Relative Radiometric Normalization of Multitemporal and Multisensor Remote Sensing Images Using Image Features. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5400820. [Google Scholar] [CrossRef]
- Kim, T.; Han, Y. Integrated Preprocessing of Multitemporal Very-High-Resolution Satellite Images via Conjugate Points-Based Pseudo-Invariant Feature Extraction. Remote Sens. 2021, 13, 3990. [Google Scholar] [CrossRef]
- Moghimi, A.; Celik, T.; Mohammadzadeh, A. Tensor-Based Keypoint Detection and Switching Regression Model for Relative Radiometric Normalization of Bitemporal Multispectral Images. Int. J. Remote Sens. 2022, 43, 3927–3956. [Google Scholar] [CrossRef]
- Otsu, N. Threshold Selection Method From Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 11, 23–27. [Google Scholar] [CrossRef]
- Liu, S.; Du, Q.; Tong, X.; Samat, A.; Bruzzone, L.; Bovolo, F. Multiscale Morphological Compressed Change Vector Analysis for Unsupervised Multiple Change Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4124–4137. [Google Scholar] [CrossRef]
- El-Hattab, M.M. Applying Post Classification Change Detection Technique to Monitor an Egyptian Coastal Zone (Abu Qir Bay). Egypt. J. Remote Sens. Sp. Sci. 2016, 19, 23–36. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Ref./Sub | Satellite (Sensor) | Band Type | Resolution | Image Size (Pixels) | Date | Study Area | |
|---|---|---|---|---|---|---|---|---|
| Spatial (m) | Radiometric (Bits) | |||||||
| # 1 | Landsat 7 (ETM+) | Blue; Green; Red; NIR *; SWIR * 1; SWIR 2 | 30 | 8 | 534 × 960 | August 1999 | West Azerbaijan, Iran | |
| Landsat 5 (TM) | 534 × 960 | September 2010 | ||||||
| # 2 | Landsat 7 (ETM+) | Blue; Green; Red; NIR; SWIR 1; SWIR 2 | 30 | 8 | 582 × 574 | May 2003 | Cagliari, Italy | |
| 1131 × 1130 | September 2002 | |||||||
| # 3 | Landsat 8 (OLI) | Coastal; Blue; Green; Red; NIR; SWIR 1; SWIR 2 | 30 | 12 | 3130 × 2405 | June 2021 | Qeshm Island, Iran | |
| Landsat 9 (OLI-2) | 2278 × 2292 | November 2022 | ||||||
| # 4 | Landsat 7 (ETM+) | Green; Red; NIR; mSWIR 1 | 30 | 8 | 7871 × 7151 | March 2002 | San Francisco, CA, USA | |
| IRS (LISS IV) | 23.5 | 7883 × 7490 | February 2022 | |||||
| # 5 | Landsat 5 (TM) | Green; Red; NIR; SWIR 1 | 30 | 8 | 1000 × 1000 | July 2009 | Daggett County, UT, USA | |
| IRS (LISS IV) | 24 | 1000 × 1000 | June 2020 | |||||
| Dataset # | Method | RMSE | Comp. Time (s) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| C/A | Blue | Green | Red | NIR | SWIR 1 | SWIR 2 | Avg. | |||
| # 1 | Raw | N/D | 44.28 | 71.17 | 84.13 | 62.39 | 83.88 | 73.10 | 69.83 | N/D |
| HM | N/D | 48.72 | 43.01 | 69.89 | 64.19 | 85.22 | 70.61 | 63.61 | 1.08 | |
| Blockwise KAZE | N/D | 37.74 | 44.22 | 66.39 | 59.08 | 77.35 | 65.86 | 58.44 | 37.1 | |
| Keypoint-based RRN | N/D | 43.70 | 48.41 | 69.90 | 59.78 | 78.04 | 67.23 | 61.18 | 24.82 | |
| LIRRN | N/D | 37.34 | 41.85 | 59.41 | 61.09 | 77.22 | 66.50 | 57.24 | 1.84 | |
| Fusion | N/D | 39.36 | 43.69 | 61.20 | 60.34 | 77.26 | 66.43 | 58.05 | 26.91 | |
| # 2 | Raw | N/D | 108.2 | 101.51 | 100.41 | 126.95 | 139.10 | 130.00 | 117.72 | N/D |
| HM | N/D | 32.12 | 34.17 | 37.06 | 37.77 | 22.41 | 24.82 | 31.39 | 1.02 | |
| Blockwise KAZE | N/D | 30.02 | 31.63 | 34.49 | 32.51 | 14.61 | 19.61 | 27.14 | 31.74 | |
| Keypoint-based RRN | N/D | 28.71 | 33.63 | 36.04 | 32.52 | 13.62 | 18.95 | 27.25 | 20.33 | |
| LIRRN | N/D | 27.53 | 31.24 | 33.71 | 32.86 | 13.53 | 18.70 | 26.26 | 2.35 | |
| Fusion | N/D | 27.43 | 31.72 | 34.45 | 32.65 | 13.51 | 18.54 | 26.38 | 23.09 | |
| # 3 | Raw | 9151.3 | 10,031.94 | 11,779.02 | 12,232.78 | 13,582.19 | 14,545.61 | 13,249.57 | 12,081.77 | N/D |
| HM | 2019.93 | 2034.29 | 2613.71 | 4011.93 | 5274.75 | 5195.34 | 4475.87 | 3660.83 | 2.877 | |
| Blockwise KAZE | 1191.36 | 1069.10 | 1107.65 | 1423.71 | 1854.64 | 2002.92 | 1788.16 | 1491.08 | 1210.21 | |
| Keypoint-based RRN | 1206.01 | 1103.10 | 1171.84 | 1506.03 | 1957.89 | 2128.69 | 1873.97 | 1563.93 | 890.64 | |
| LIRRN | 1223.28 | 1171.67 | 1536.92 | 1497.34 | 1578.61 | 1792.30 | 1578.01 | 1482.59 | 35.65 | |
| Fusion | 1181.23 | 982.33 | 922.05 | 1204.12 | 1662.05 | 1726.35 | 1540.91 | 1317 | 927.44 | |
| # 4 | Raw | N/D | N/D | 17.54 | 18.29 | 85.79 | 41.41 | N/D | 40.76 | N/D |
| HM | N/D | N/D | 17.83 | 25.41 | 44.2 | 43.35 | N/D | 32.7 | 6.03 | |
| Blockwise KAZE | N/D | N/D | 11.86 | 17.36 | 18.24 | 19.18 | N/D | 16.66 | 5725.39 | |
| Keypoint-based RRN | N/D | N/D | 10.66 | 17.01 | 18.12 | 19.46 | N/D | 16.31 | 5558.84 | |
| LIRRN | N/D | N/D | 13.67 | 17.78 | 18.55 | 20.68 | N/D | 17.67 | 39.73 | |
| Fusion | N/D | N/D | 11.36 | 17.31 | 18.09 | 17.95 | N/D | 16.18 | 5590.61 | |
| # 5 | Raw | N/D | N/D | 98.15 | 89.59 | 89.25 | 90.43 | N/D | 91.86 | N/D |
| HM | N/D | N/D | 56.70 | 49.27 | 75.18 | 63.33 | N/D | 61.12 | 1.76 | |
| Blockwise KAZE | N/D | N/D | 18.28 | 21.23 | 25.74 | 28.45 | N/D | 23.43 | 61.84 | |
| Keypoint-based RRN | N/D | N/D | 17.04 | 20.27 | 27.74 | 27.48 | N/D | 23.13 | 53.12 | |
| LIRRN | N/D | N/D | 24.06 | 26.19 | 27.53 | 33.18 | N/D | 27.74 | 3.67 | |
| Fusion | N/D | N/D | 17.66 | 20.49 | 25.92 | 27.30 | N/D | 22.84 | 58.11 | |
| Dataset # | RRN Status (× 1; ✓ 2) | (%) | (%) | (%) | OA (%) | FS |
|---|---|---|---|---|---|---|
| # 1 | × | 64.98 | 7.33 | 29.72 | 70.28 | 47.78 |
| ✓ | 1.06 | 5.66 | 3.87 | 96.13 | 95.20 | |
| # 2 | × | 70.83 | 17.56 | 20.48 | 79.52 | 13.53 |
| ✓ | 14.21 | 1.43 | 2.14 | 97.86 | 81.52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moghimi, A.; Sadeghi, V.; Mohsenifar, A.; Celik, T.; Mohammadzadeh, A. LIRRN: Location-Independent Relative Radiometric Normalization of Bitemporal Remote-Sensing Images. Sensors 2024, 24, 2272. https://doi.org/10.3390/s24072272
Moghimi A, Sadeghi V, Mohsenifar A, Celik T, Mohammadzadeh A. LIRRN: Location-Independent Relative Radiometric Normalization of Bitemporal Remote-Sensing Images. Sensors. 2024; 24(7):2272. https://doi.org/10.3390/s24072272
Chicago/Turabian StyleMoghimi, Armin, Vahid Sadeghi, Amin Mohsenifar, Turgay Celik, and Ali Mohammadzadeh. 2024. "LIRRN: Location-Independent Relative Radiometric Normalization of Bitemporal Remote-Sensing Images" Sensors 24, no. 7: 2272. https://doi.org/10.3390/s24072272
APA StyleMoghimi, A., Sadeghi, V., Mohsenifar, A., Celik, T., & Mohammadzadeh, A. (2024). LIRRN: Location-Independent Relative Radiometric Normalization of Bitemporal Remote-Sensing Images. Sensors, 24(7), 2272. https://doi.org/10.3390/s24072272