
BLE-Based Indoor Localization: Analysis of Some Solutions for Performance Improvement

 , ,
, ,  ,
,  , , and
, , and
Abstract
1. Introduction
- Provide a methodology for analyzing different techniques that have the greatest impact on the performance of a BLE-based indoor localization system. In particular, some of the solutions already proposed in the literature are considered and implemented, also considering different combination schemes.
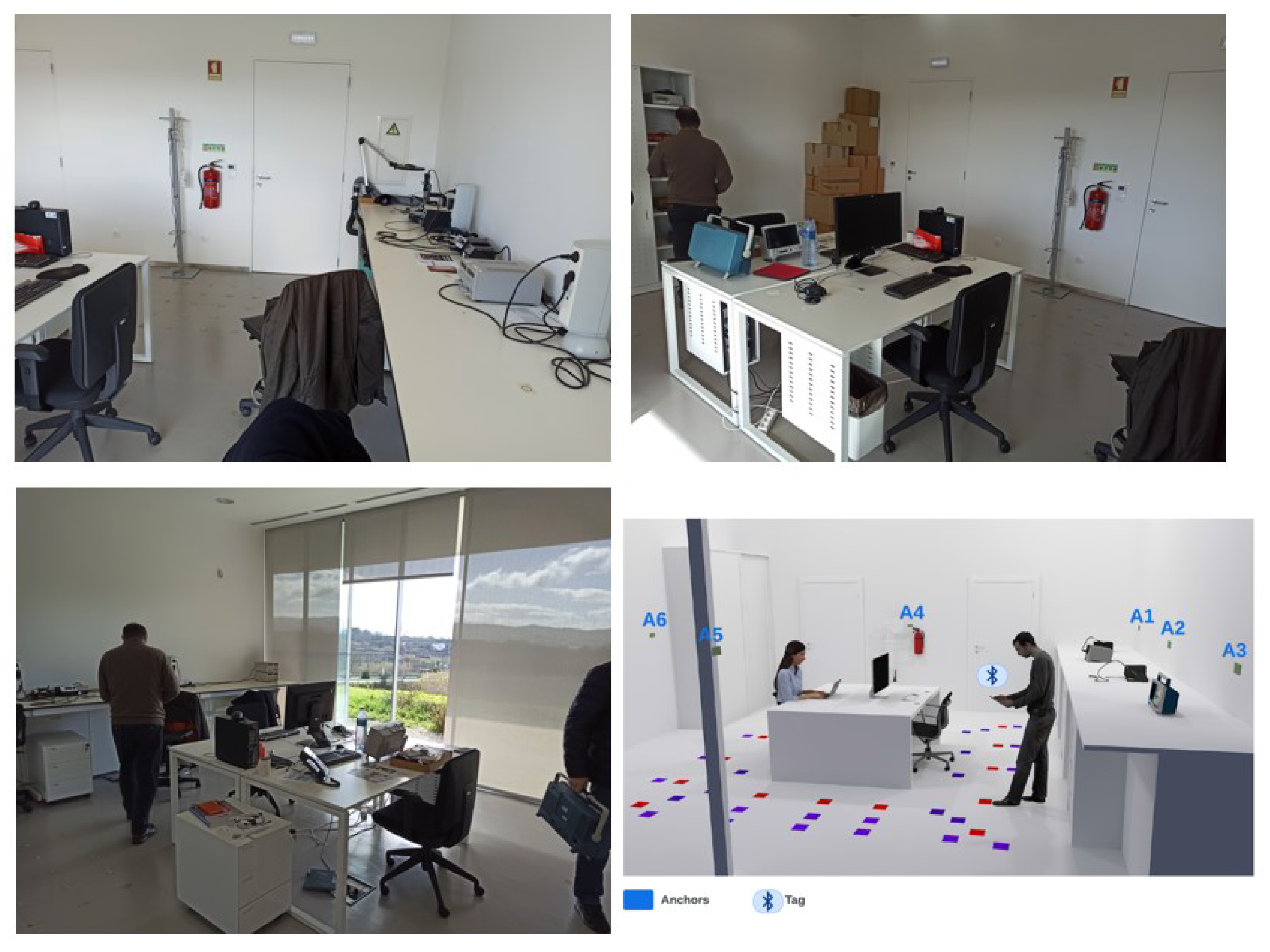
- The analysis was carried out via an experimental campaign in a complex indoor environment characterized by the presence of working staff and numerous obstacles.
- The obtained performance results are compared using different combination schemes of the analyzed solutions in order to identify the solution (or a combination of them) that most contributes to the improvement of a BLE-based indoor localization system.
2. Brief Notes of BLE 5.0 Technology
- Reduced energy consumption: BLE 5.0 technology is designed to provide very low power consumption, enabling extended battery life for battery-powered devices. In fact, in BLE, 5.0 devices can have up to 50% lower power consumption than previous versions [13].
- Wide coverage: BLE 5.0 offers a significant increase in range over previous versions. The transmission range can reach up to 200 m in optimal outdoor conditions, enabling wider coverage even in indoor environments by reaching coverage distances of 40 m [13]. This translates into greater flexibility in anchor placement and coverage of larger areas with fewer devices, reducing deployment costs.
- Higher data rates: BLE 5.0 technology supports a data rate of up to 2 Mbps, offering increased information transfer capability. This data rate allows for large amounts of data to be sent efficiently, enabling fast and reliable communication among location devices [13].
3. The Analyzed Localization Solutions
3.1. Use of Multichannel Transmission
- Maximum techniqueIn this case, the aggregated data coincides with the maximum RSSI measured on the three transmission channelswhere i denotes the i-th repeated measurement. In the rest of the paper, we will refer to this technique as the max technique.
- Mean techniqueThe second adopted technique aggregates the data, considering the arithmetic average of the measured RSSI on the three transmission channelswhere i denotes the i- repeated measurement. In the rest of the paper, we will refer to this technique as the mean technique.
- Maximum ratio combining techniqueWith the principle of the maximum ratio combining technique, a weighted average is carried out on the RSSI measured by the three transmission channelswhere i denotes the i- repeated measurement. Consequently, the channel with the highest (lowest) RSSI will have the highest (lowest) weight in the computation of the aggregated RSSI. The value is a constant that represents the receiver sensitivity taken from the datasheet of the adopted BLE device. In the rest of the paper, we will refer to this technique as the mrc technique.
3.2. RSSI Filtering
- k represents the the discrete time instant;
- x represents the filtered RSSI data (state variable);
- w represents the process noise;
- y represents the measured RSSI data (output variable);
- v represents the measurement noise.
3.3. Distance Estimation
- The first approach is made by means of an empirical path loss propagation model based on a logarithmic relationship between the measured RSSI and the distance (10). The estimate of the distance d is performed by measuring the RSSI and inverting (10), as shown in (11). The values of A and n must be estimated during a calibration phase: A represents the measured RSSI when and n identifies the path loss exponent.
- The second approach is based on a Machine Learning (ML) model, as detailed in the Section 3.4.
3.4. Positioning Approaches
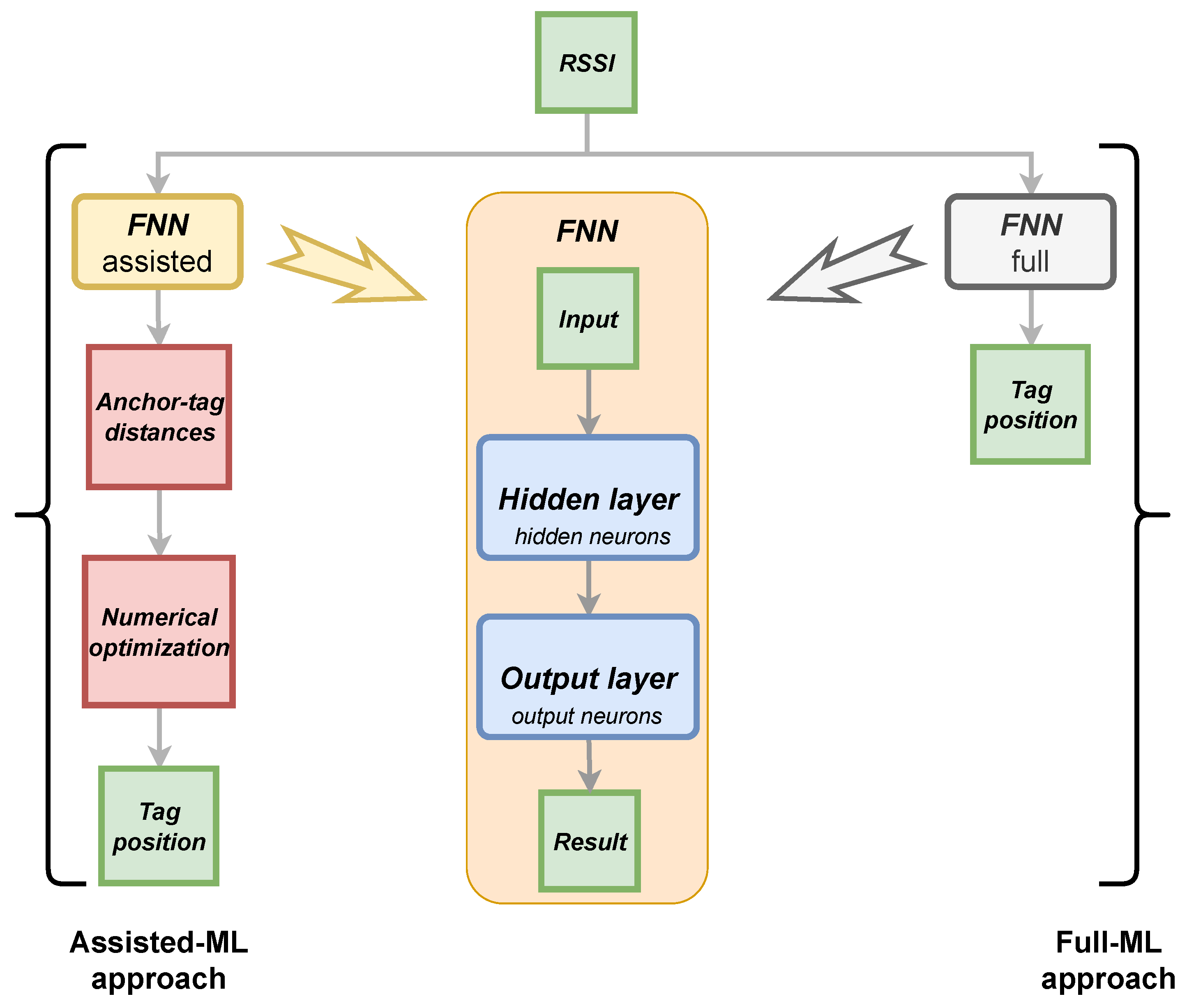
- Numerical optimizationIn this case, we define the unknown tag position as the result of a minimization process defined in (12), where the objective function is defined in (13).In (13), M indicates the number of anchors used in the experimental set-up, indicates the estimated distance between the i-th anchor and the tag, while represents the theoretical distance between the i-th anchor and the tag if the tag position is equal to . Therefore, is obtained by minimizing the error between the measured and the theoretical quantity for each anchor considered in the experimental set-up. The minimization problem is solved by the Nelder–Mead algorithm [29]. In the rest of the paper, we will refer to this approach as the numerical optimization approach.
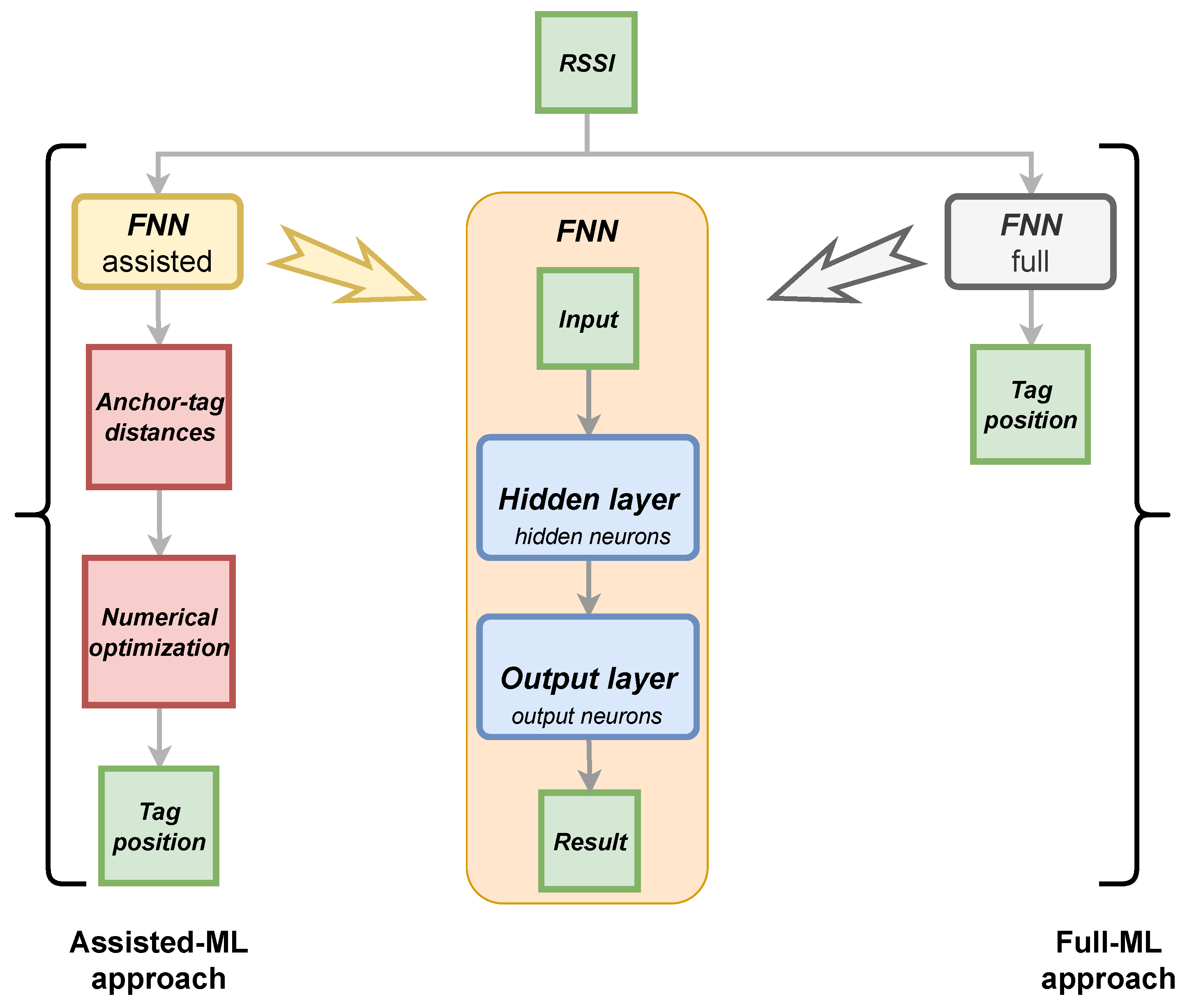
- Assisted-ML approachThe ML approaches use a regression model based on a two-layer Feed-Forward Neural Network (FNN). The structure of the adopted FNN is shown in Figure 1 and it was designed in the MATLAB environment. Details about the FNN are given in the following:
- the input is represented by the aggregate RSSI, obtained with any of the algorithms described in Section 3.1 and filtered; the size of the RSSI vector is equal to the number of anchors installed in the experimental set-up;
- the hidden layer consists of 20 neurons. It was explored by the authors that this choice represents a good compromise between the computational cost and accurate estimation performance obtained with the FNN considered;
- the activation functions of the hidden layer and the output layer are sigmoid and linear, respectively;
- the type of result is represented by the estimated distances between the tag and each anchor used in the experimental set-up; therefore, the number of neurons in the output layer coincides with the number of anchors present in the experimental set-up.
This approach uses the designed FNN to estimate the RSSI-distance model and, subsequently minimizing an objective function (applying the numerical optimization described above), derives the unknown tag position (see left in Figure 1). Consequently, in the rest of the paper, we will refer to this approach as the assisted-ML approach, since only a part of the problem is solved through the use of ML models. - Full-ML approachThe FNN described in Figure 1 is used to directly obtain the tag position (see right in Figure 1). Given the RSSI vector as input, it returns the tag position in Cartesian coordinates as a result. Consequently, in this case, the output layer of the FNN consists of two neurons associated with the size of the results (x and y coordinates).
4. Adopted Experimental Set-Up
5. Obtained Results
5.1. Preliminary Considerations
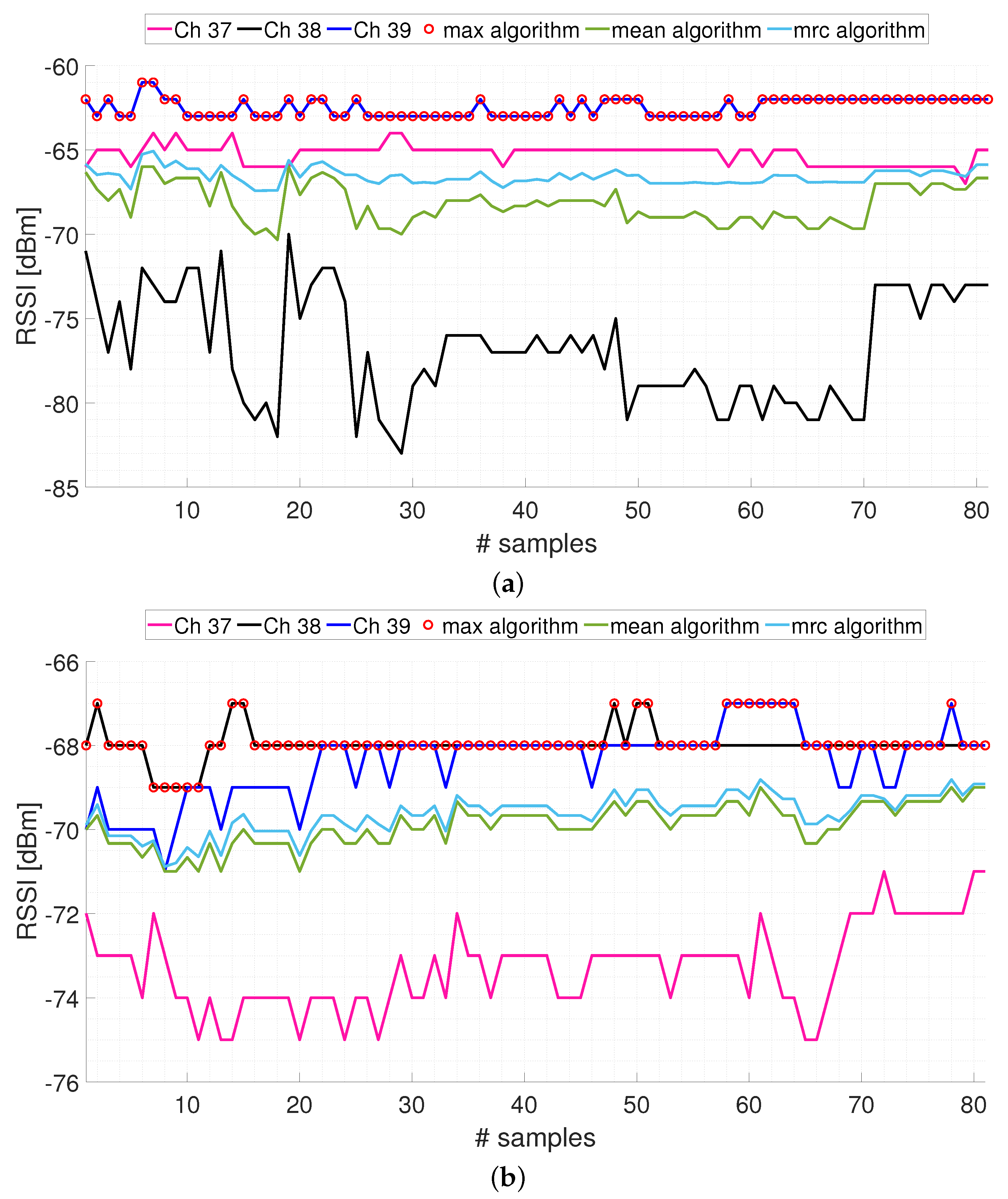
- Multichannel transmission and aggregation techniquesInitially, we want to discuss the use of the analyzed aggregation techniques to exploit multichannel transmission. This represents the first processing operation on the acquired signals within the localization procedures, typically adopted in the literature, considered in this paper. We need to specify the value of the parameter in order to compute the mrc algorithm. Based on the datasheet of the considered devices [30], the value of is dBm.Figure 4 shows an example of the RSSI signals that can be acquired between an anchor and the tag. In particular, the raw RSSI signals acquired on the three primary transmission channels and the aggregate signals obtained with the three aggregation algorithms are shown. The acquisitions were carried out, keeping the anchor and tag stationary, and the considered anchor–tag distances are 2.7 m and 5.2 m for Figure 4a,b, respectively. About eighty acquisition samples were collected. Some considerations are highlighted below.
- Acquired signals may exhibit high variability. This is shown by the signal Ch 38 in Figure 4a which presents a difference between the maximum and minimum values of 13 dB. Obviously, due to the complexity of indoor environments, this variability makes the localization process inaccurate.
- The max algorithm sometimes coincides with the signal present on a single channel (as shown in Figure 4a), while other times, it alternates the selection among different channels (as shown in Figure 4b). So, the max algorithm considers more signals if they are close to each other, otherwise it selects only the values of the signal with higher intensity.
- Unlike the max algorithm, the mean and mrc algorithms always consider the characteristics of all three primary transmission channels. The difference between the two algorithms is that in one case, a simple average is performed (mean algorithm), while on the other hand, a weighted average is performed in which the lower intensity signal has a lower weight than the higher intensity signals (mrc algorithm).
- The localization process can be affected by the choices made in the number of the adopted transmission channels, by the chosen transmission channels (if less than the available ones), and by the aggregation algorithm to be used for the combination of the RSSI signals.
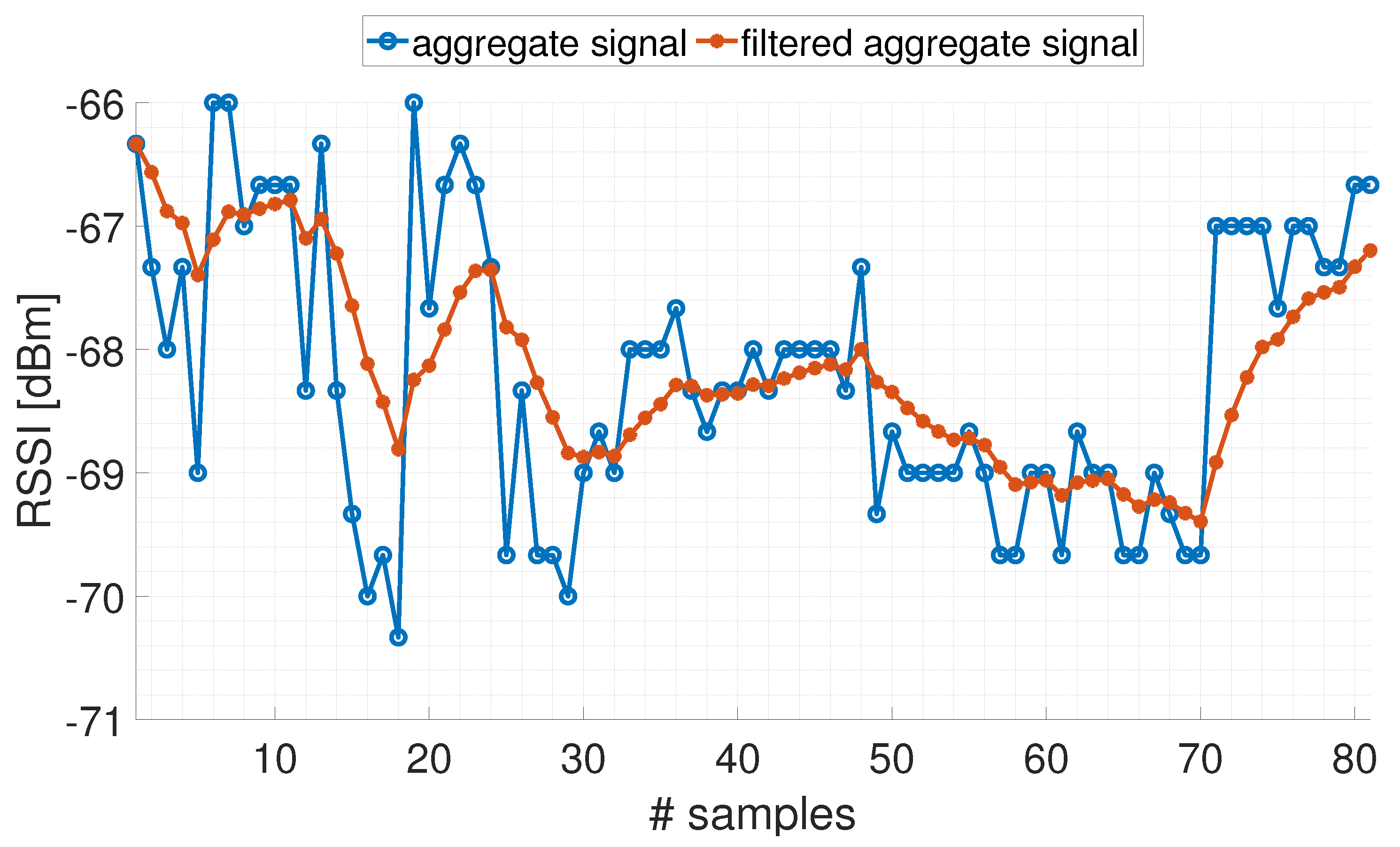
In conclusion, the information acquired on the three primary transmission channels contribute, all or in part, depending on the adopted aggregation algorithm, to the formation of an overall aggregate signal to be processed.The particular configuration of the room or the building, and the aspects of radio propagation of signal, such as the environment conditions, the obstacles, and the interference due to reflections, have an impact on the level of the signals received. Also, the particular characteristics of the hardware used, namely, the transmitter output power, the sensitivity of the receiver, and the antenna gains, can influence the results. Therefore, by considering another environment configuration (room/building), or using a different hardware setup, can lead to different values of RSSI, although it does not compromise the generality and the applicability of the methodology proposed. - The effect of the filtering procedureAs shown in Figure 4a, variability of the acquired signals is present both on the RSSI values coming from the single transmission channel, and on the RSSI values obtained after the application of the aggregation algorithms. The shown variability is the reason for which even if the aggregation algorithms are applied, the RSSI signals are typically filtered. In Figure 5, it is shown an example of the effect of the Kalman filtering approach described in Section 3.2, applied to the signal aggregated by means of the mean aggregation algorithm. The acquisitions were carried out keeping the anchor and tag stationary at a distance equal to 2.7 m. It is noted how all the oscillations present on the aggregate signal are reduced on the filtered signal and how any drift of the aggregate signal in the filtered signal is slowed down. The filtering operation also allows for the discard of possible outliers present in the measurements. As far as the specific settings of the adopted filter, and have been set as equal to (i.e., the first available RSSI measurement) and to 1, respectively; while, via empirical tests, the values of and have been determined as equal to 1 and . This is a common practice when it is necessary to set the parameters of the Kalman filter, as highlighted in [14]. It can be seen that in our procedure, the model has more weight than the measurement process, since the filter is applied to estimate a quantity (RSSI) that is ideally constant.
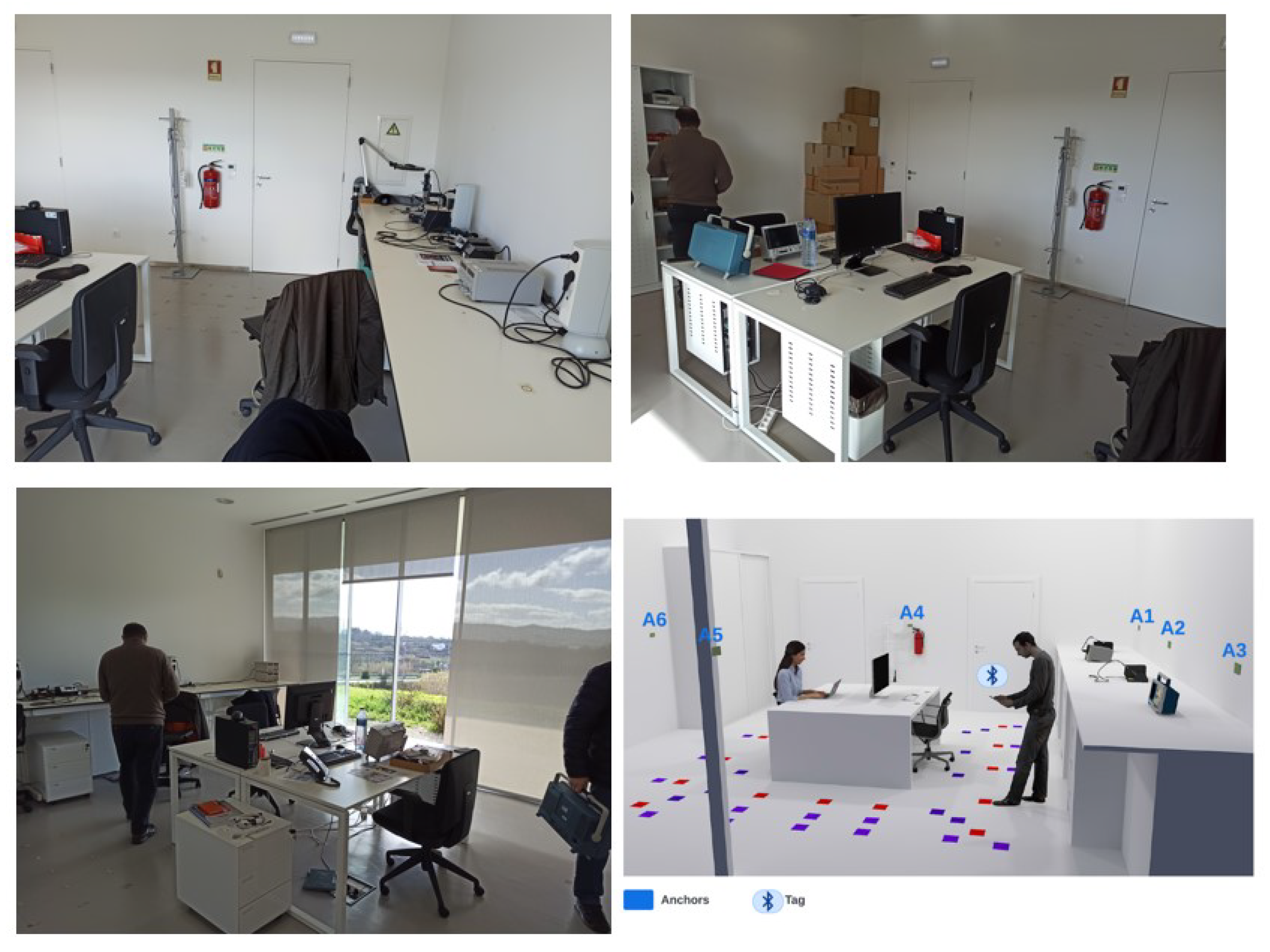
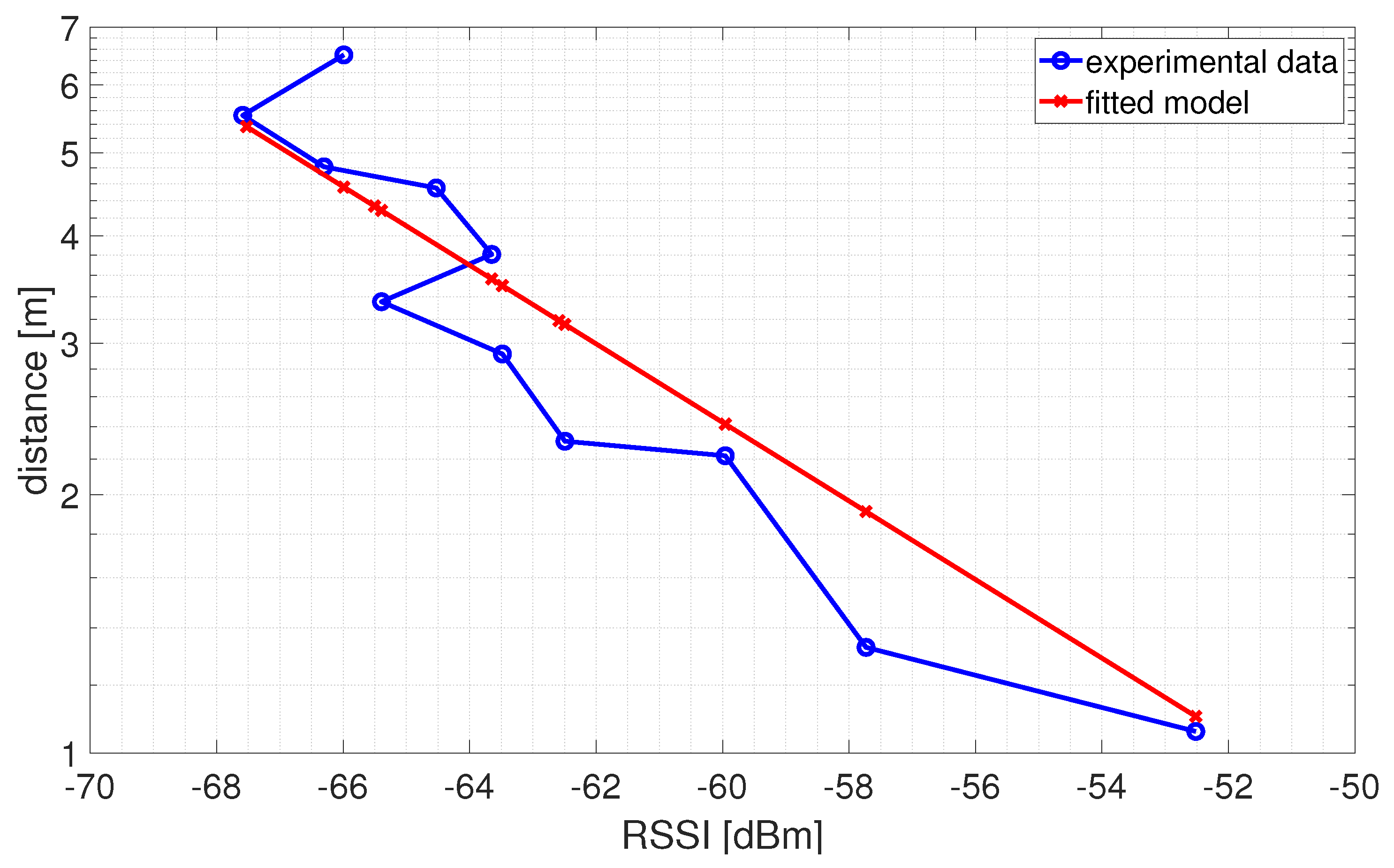
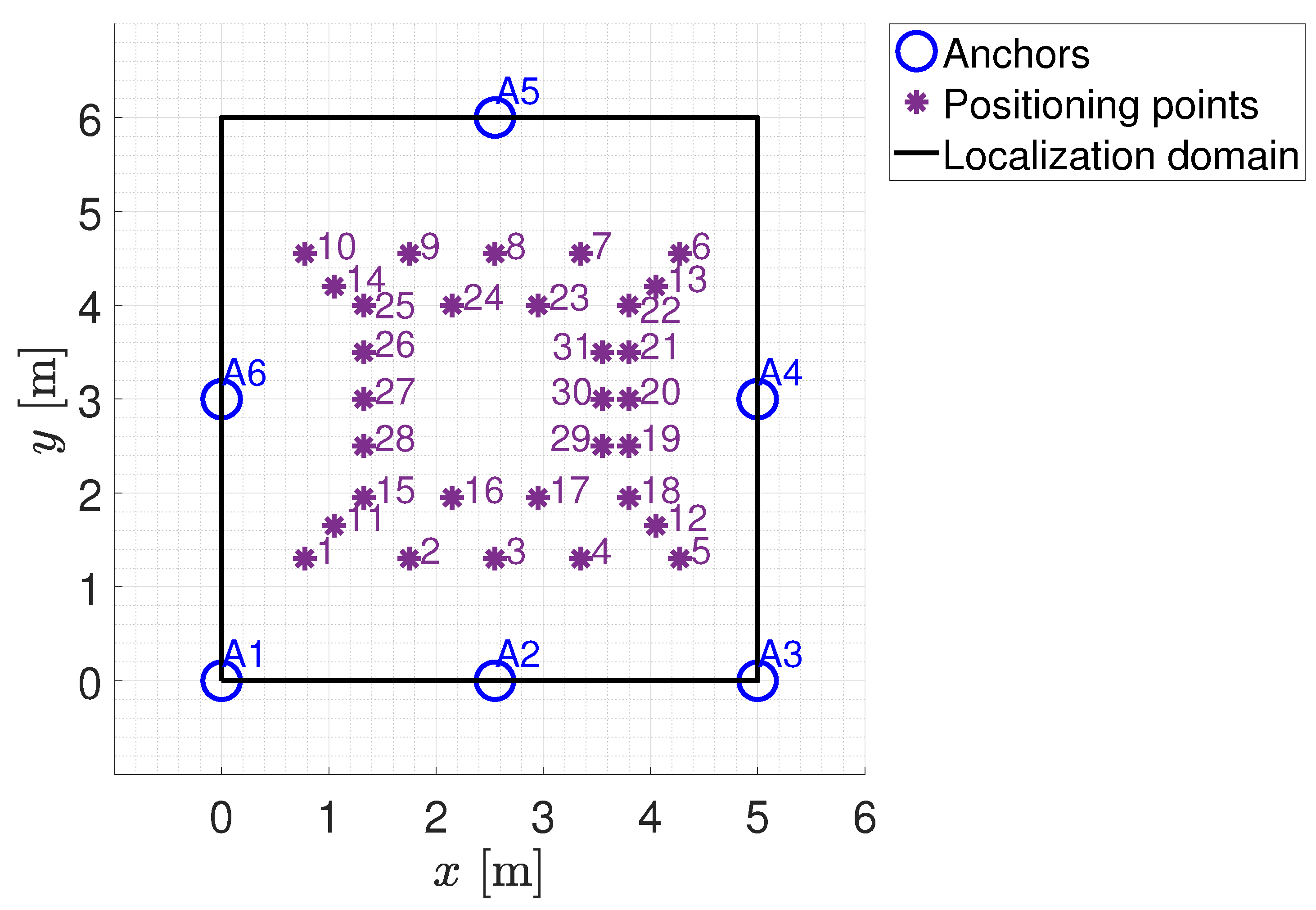
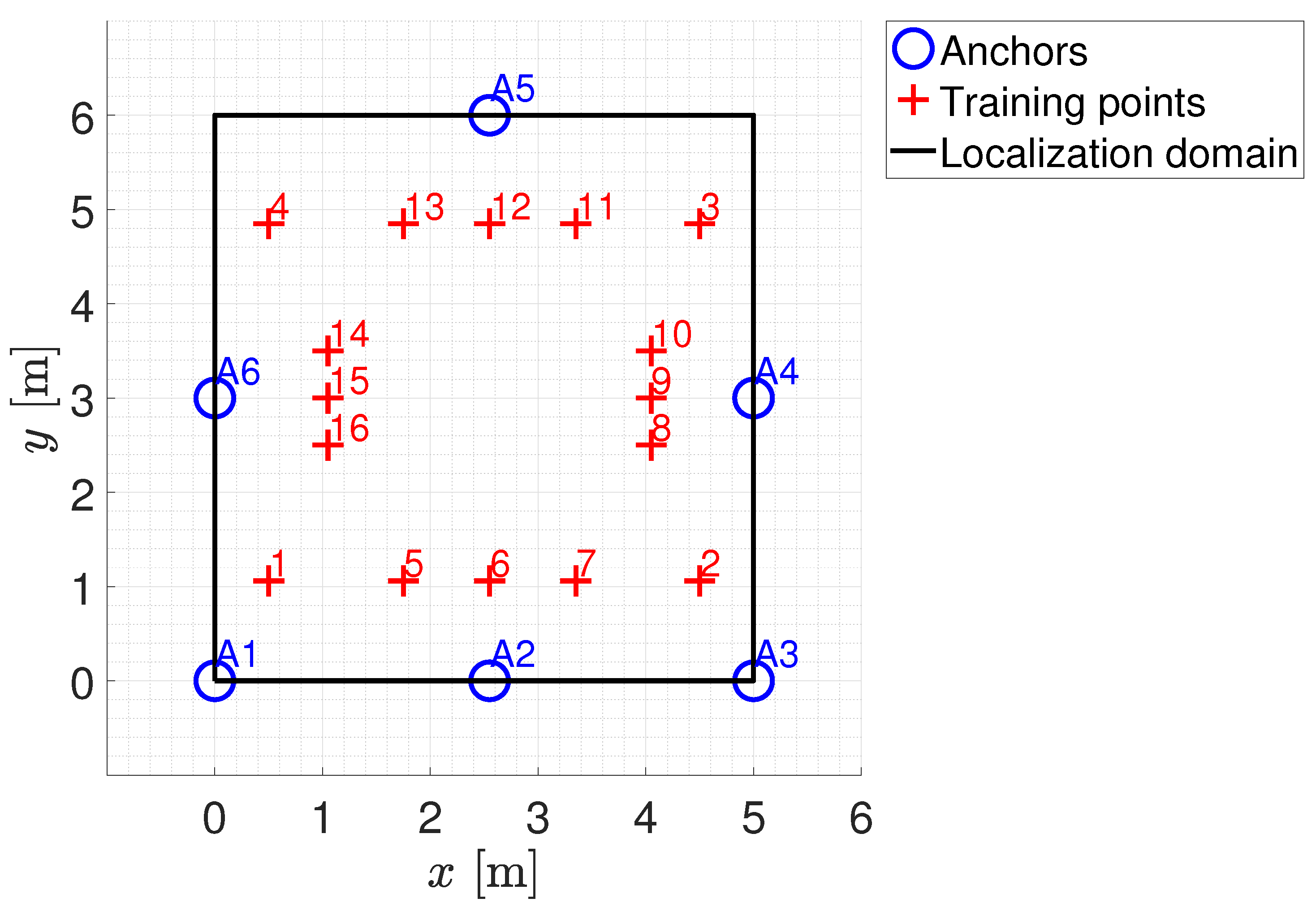
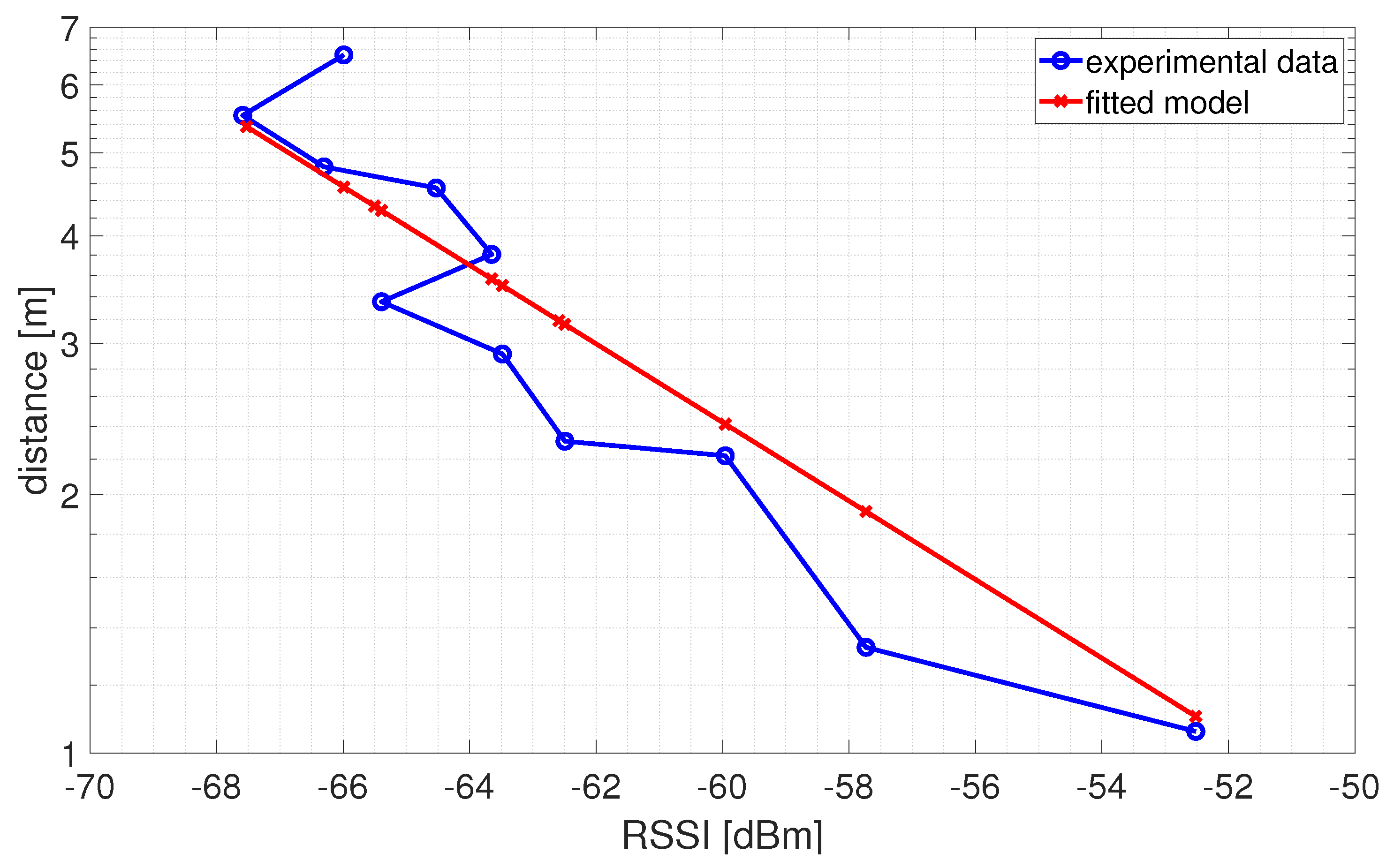
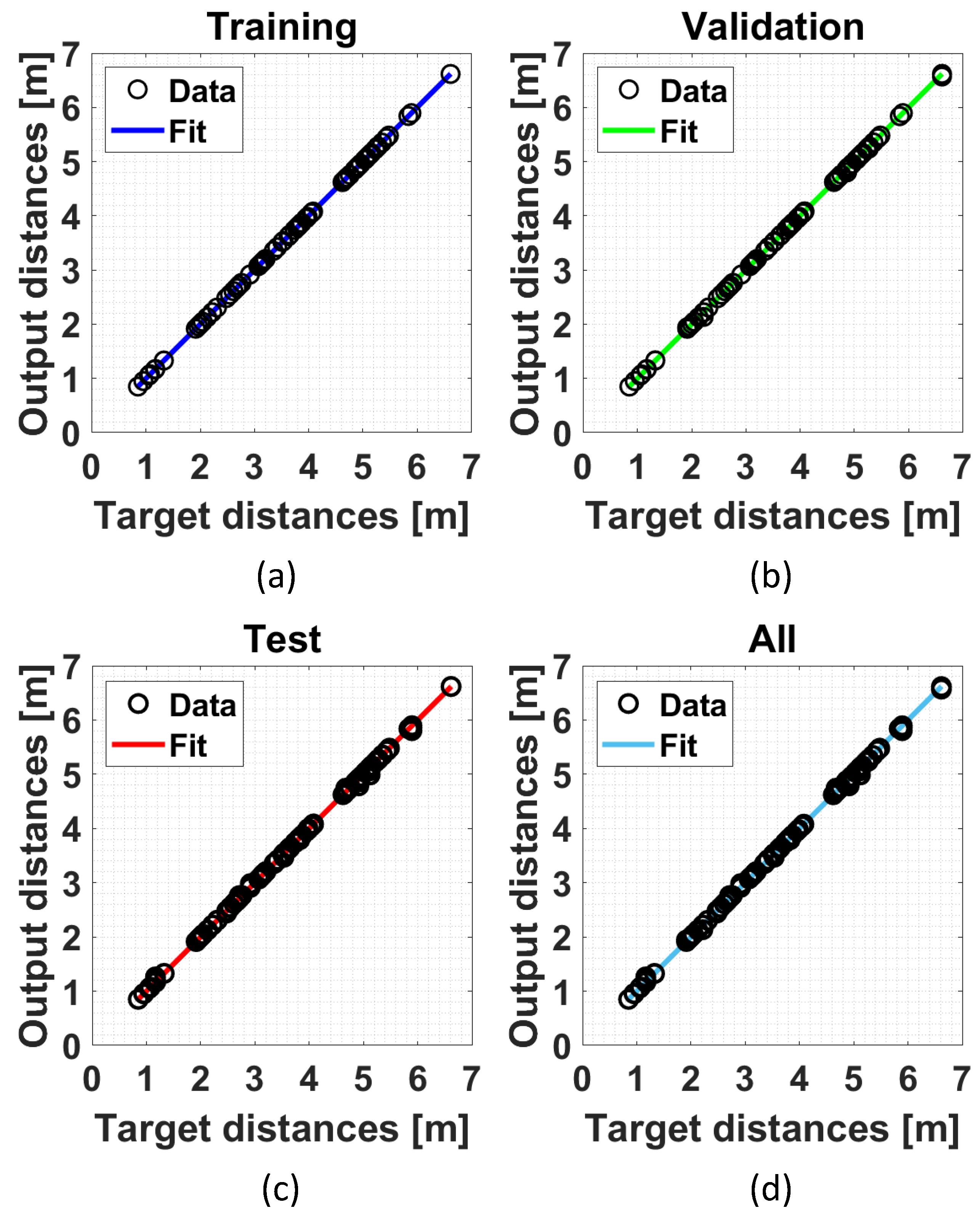
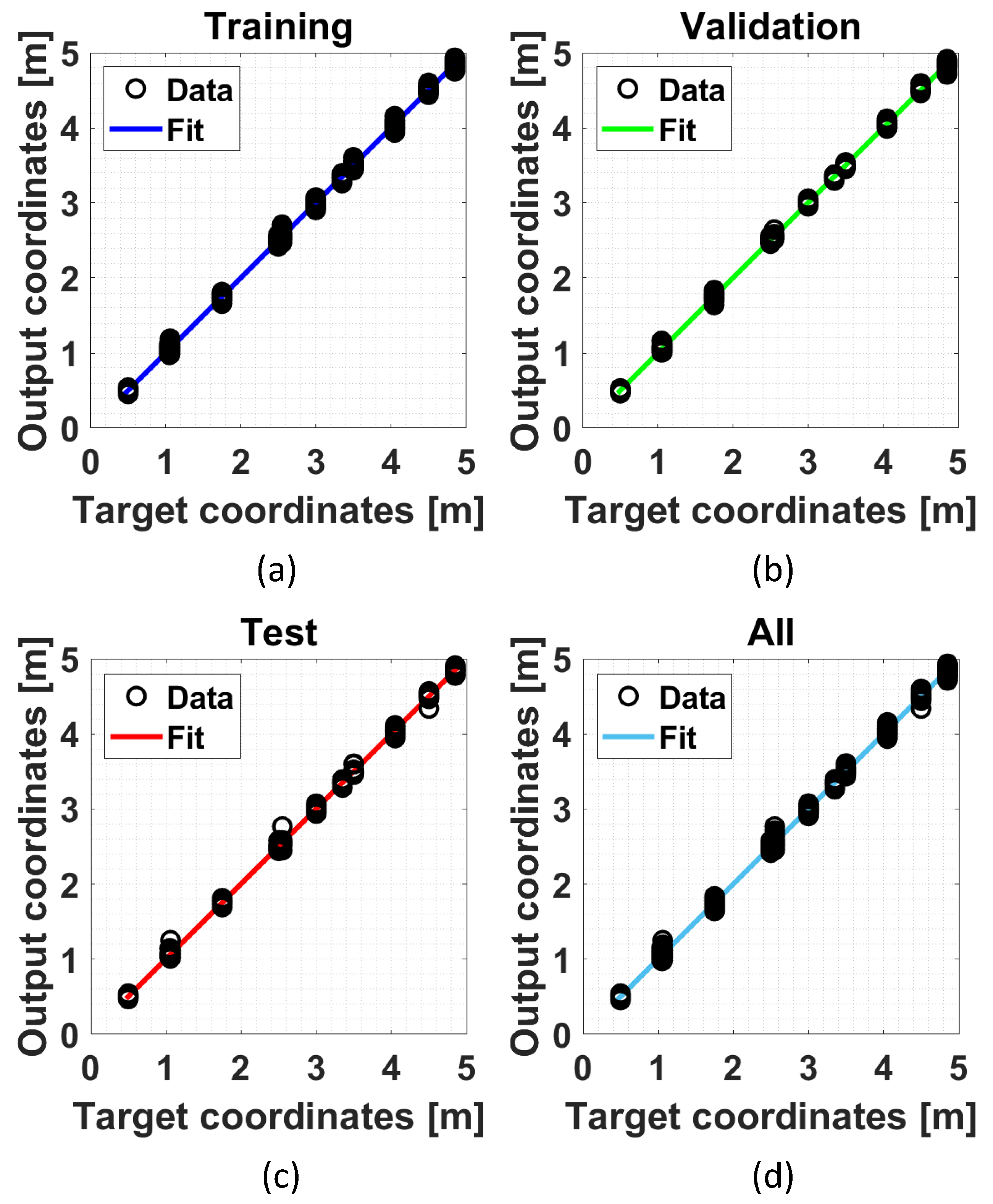
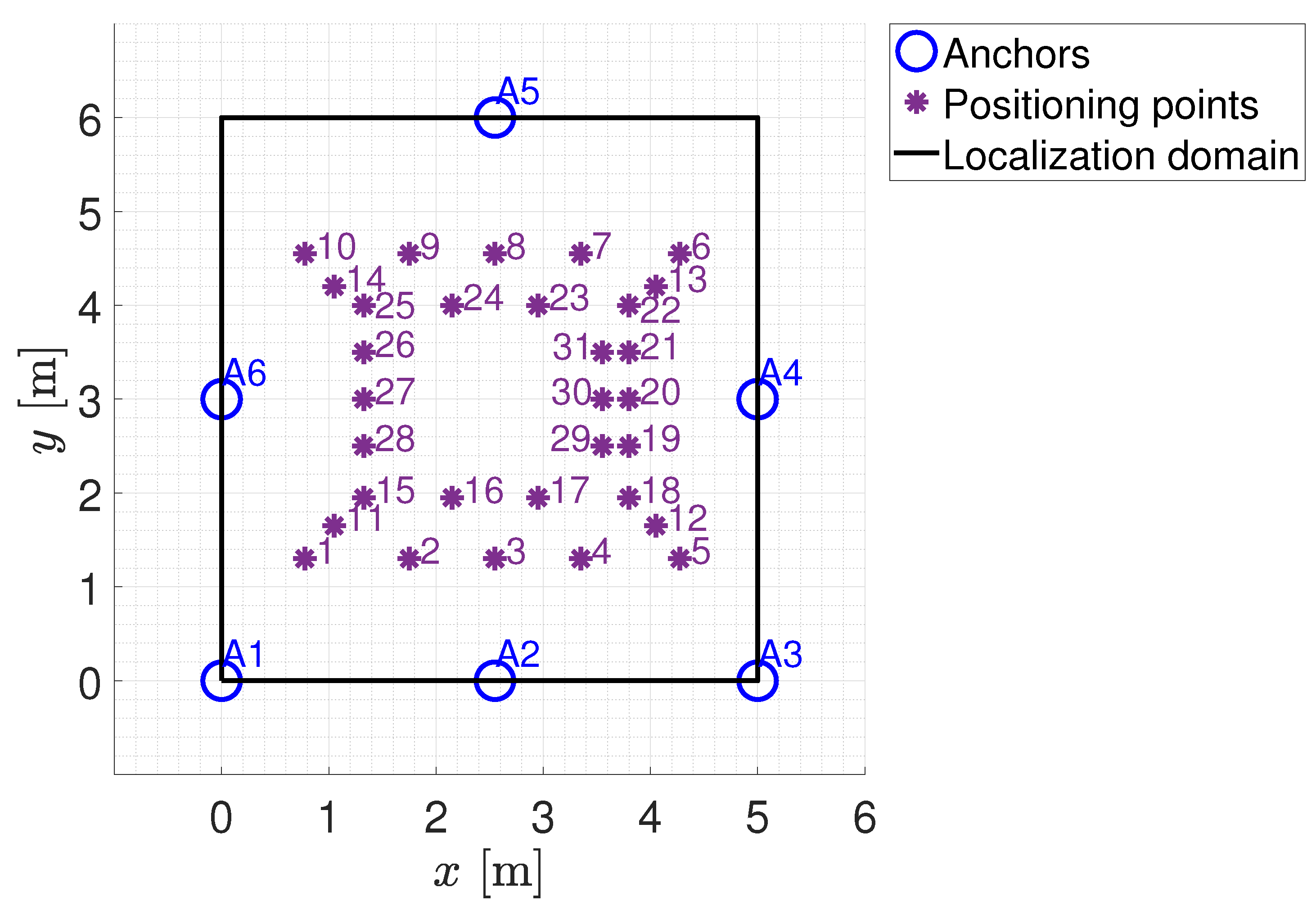
- Calibration and training of the distance/position estimationSome considerations can be made on both the estimation of distances/positions from the RSSI data and the quality of the calibration/training procedures depending on the chosen distance/estimation approaches. As far as distance estimation using the empirical path loss propagation model described in Section 3.3, the RSSI–distance relationship has to be estimated via a preliminary calibration phase. The calibration phase is made by means of an experimental campaign carried out using all the anchors installed in the experimental set-up (see Figure 3). In particular, sixteen training points located within the localization domain were considered. Figure 6 shows the schematic diagram of the identified training points (the training points in the center of the localization domain have not been considered because this area is occupied by a work table, see Figure 3). For each training point, 100 repeated RSSI measurements were performed for each anchor in different times and with environmental conditions. It is important to note that all data used for calibration comes exclusively from experimental tests and there are no data augmentation procedures via numerically simulated training points. In fact, in our opinion, the numerical generation of data, in a complex scenario such as the indoor one where propagation problems are not kept under control, is not reliable given the difficulty in identifying an accurate model for predicting signals.RSSI–distance relationships were estimated for each anchor of the experimental set-up using the experimental campaign performed in the calibration phase. In detail, for each anchor, the experimental data were fitted with an analytical model given by (11). Figure 7 shows an example of the result obtained for one of the considered anchors (A2 in Figure 6) using the RSSI data aggregated with the maximum algorithm and filtered. In this example, a Root Mean Square Error (RMSE) of 1.0658 m, a maximum error of 2.3395 m, and a coefficient of determination of 0.7224 were obtained on the entire calibration curve shown in Figure 7. The obtained results in terms of the coefficients of the model (11) are equal to and . By examining Figure 7, it is possible to highlight, as the expected linear behavior of the relationship between the distance and the RSSI (in logarithmic scale) is not perfectly satisfied. This is also confirmed by a low value of the coefficient of determination . This is caused by the complexity of the indoor environments with several obstacles and interference signals. The effect is a reduction on the expected accuracy in the tag localization.As discussed in Section 3.4, the ML models-based positioning approaches use FNNs (different depending on the specific approach) that need to be trained. The training phase took place with the experimental data obtained during the calibration phase described above. After an arrangement of the collected measurement data, 1600 training points (observations) were obtained for each anchor to be used for the FNN training phase. All available training points have been divided as follows: 70% for training, 15% for validation, and 15% for testing. The FNNs were trained in the MATLAB environment, in which a loss function based on the Mean Squared Error (MSE) was used for training, validation, and testing procedures. Figure 8 and Figure 9 show the obtained results in terms of regression plots for the assisted-ML and full-ML approaches, respectively. Furthermore, Table 4 and Table 5 summarize the results in terms of the used number of observations, MSE, and coefficient of determination for training, validation, and testing. The obtained results show good linearity for all used datasets and for both proposed approaches.
5.2. Positioning Results
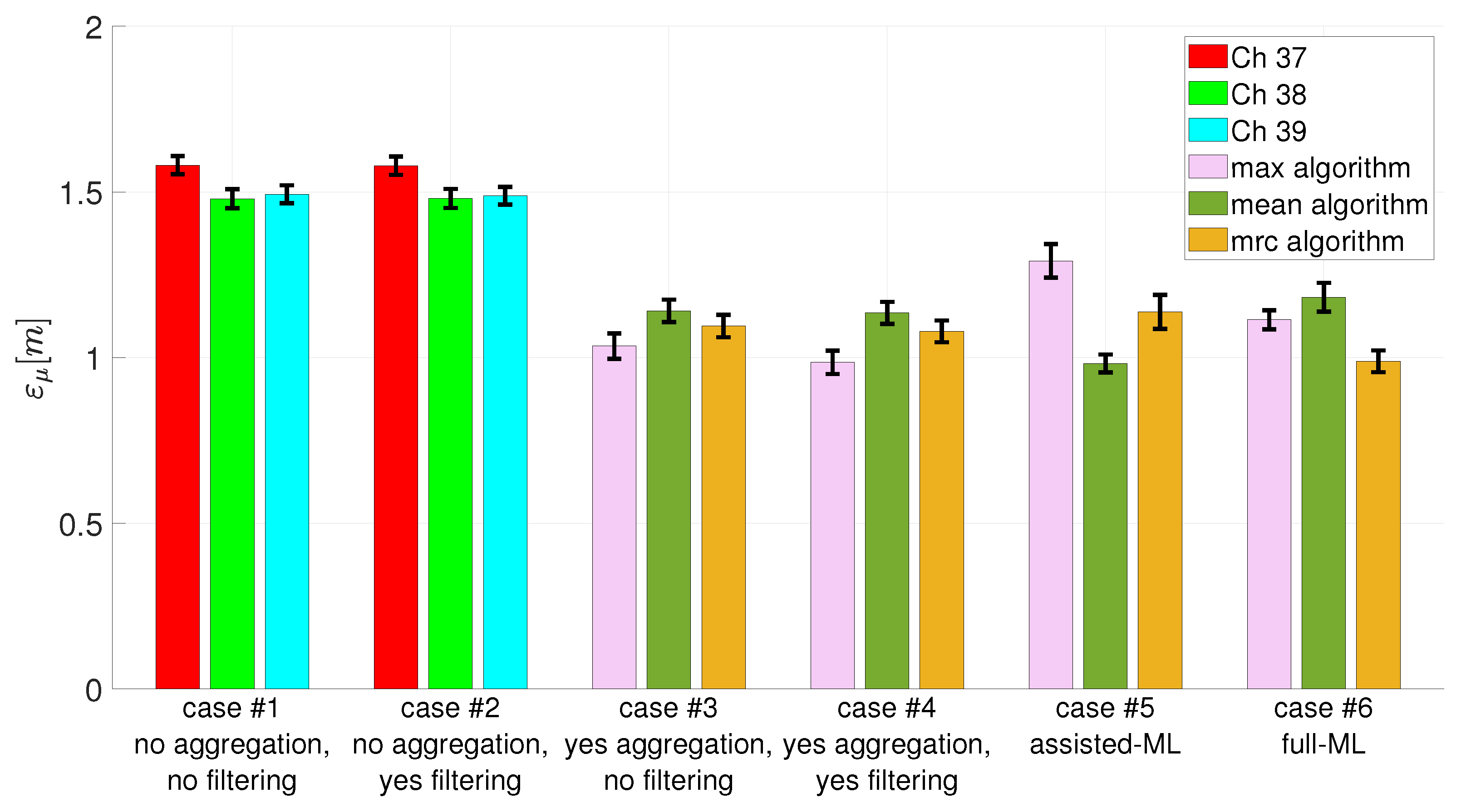
- case #1 –> no aggregation, no filtering: no conditioning on the acquired signals is carried out. During the calibration phase, the propagation models are estimated for each transmission channel (Ch 37, Ch 38, and Ch 39) using the empirical path loss propagation models. During the testing phase, the obtained propagation models are used to estimate anchor–tag distances, and the estimation of the unknown tag positions is carried out via the numerical optimization approach.
- case #2 –> no aggregation, yes filtering: the signals from the transmission channels (Ch 37, Ch 38, and Ch 39) are filtered. During the calibration phase, they are used to estimate the propagation models for each transmission channel (Ch 37, Ch 38, and Ch 39) using the empirical path loss propagation models. During the testing phase, the obtained propagation models are used to estimate anchor–tag distances, and the estimation of the unknown tag positions is carried out via the numerical optimization approach.
- case #3 –> yes aggregation, no filtering: the signals from the transmission channels (Ch 37, Ch 38, and Ch 39) are aggregated with all aggregation algorithm (max, mean, and mrc). During the calibration phase, they are used to estimate the propagation models for each aggregation algorithm (max, mean, and mrc) using the empirical path loss propagation models. During the testing phase, the obtained propagation models are used to estimate anchor–tag distances, and the estimation of the unknown tag positions is carried out via the numerical optimization approach.
- case #4 –> yes aggregation, yes filtering: the signals from the transmission channels (Ch 37, Ch 38, and Ch 39) are aggregated with all aggregation algorithm (max, mean, and mrc) and filtered. During the calibration phase, they are used to estimate the propagation models for each aggregation algorithm (max, mean, and mrc) using the empirical path loss propagation models. During the testing phase, the obtained propagation models are used to estimate anchor–tag distances, and the estimation of the unknown tag positions is carried out via the numerical optimization approach.
- case #5 –> assisted-ML: the signals from the transmission channels (Ch 37, Ch 38, and Ch 39) are aggregated with all aggregation algorithms (max, mean, and mrc) and filtered. During the calibration phase, they are used to train the FNN used in the assisted-ML approach, for each aggregation algorithm (max, mean, and mrc). During the testing phase, the trained FNNs are used to estimate anchor–tag distances, and the estimation of the unknown tag positions is carried out via the numerical optimization approach.
- case #6 –> full–ML: the signals from the transmission channels (Ch 37, Ch 38, and Ch 39) are aggregated with all aggregation algorithm (max, mean, and mrc) and filtered. During the calibration phase, they are used to train the FNN used in the full-ML approach, for each aggregation algorithm (max, mean, and mrc). During the testing phase, the trained FNNs are used to directly estimate the unknown tag positions.
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zaim, D.; Bellafkih, M. Bluetooth Low Energy (BLE) based geomarketing system. In Proceedings of the 2016 11th International Conference on Intelligent Systems: Theories and Applications (SITA), Mohammedia, Morocco, 19–20 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Guerreiro, J.A.; Ahmetovic, D.; Sato, D.; Kitani, K.; Asakawa, C. Airport Accessibility and Navigation Assistance for People with Visual Impairments. In Proceedings of the CHI’19: 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–14. [Google Scholar] [CrossRef]
- Cerro, G.; Ferrigno, L.; Laracca, M.; Milano, F.; Carbone, P.; Comuniello, A.; De Angelis, A.; Moschitta, A. Probe Localization by Magnetic Measurements in Eddy-Current Nondestructive Testing Environment. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018; pp. 45–49. [Google Scholar] [CrossRef]
- Ferrigno, L.; Miele, G.; Milano, F.; Rodio, A.; Santoni, F.; De Angelis, A.; Moschitta, A.; Carbone, P.; Cerro, G. A real-time tracking system for tremor and trajectory estimation in Parkinson’s disease affected patients. In Proceedings of the 2020 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Bari, Italy, 1 June–1 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Giuliano, R.; Cardarilli, G.C.; Cesarini, C.; Di Nunzio, L.; Fallucchi, F.; Fazzolari, R.; Mazzenga, F.; Re, M.; Vizzarri, A. Indoor Localization System Based on Bluetooth Low Energy for Museum Applications. Electronics 2020, 9, 1055. [Google Scholar] [CrossRef]
- Zualkernan, I.A.; Pasquier, M.; Shahriar, S.; Towheed, M.; Sujith, S. Using BLE beacons and Machine Learning for Personalized Customer Experience in Smart Cafés. In Proceedings of the 2020 International Conference on Electronics, Information, and Communication (ICEIC), Barcelona, Spain, 19–22 January 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Bai, L.; Ciravegna, F.; Bond, R.; Mulvenna, M. A low cost indoor positioning system using bluetooth low energy. IEEE Access 2020, 8, 136858–136871. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Yuen, C.; Blessing, L. Plug-Mate: An IoT-based occupancy-driven plug load management system in smart buildings. Build. Environ. 2022, 223, 109472. [Google Scholar] [CrossRef]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Bluetooth Low Energy Based Occupancy Detection for Emergency Management. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 31–38. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Chong, A. Occupancy prediction using deep learning approaches across multiple space types: A minimum sensing strategy. Build. Environ. 2022, 226, 109689. [Google Scholar] [CrossRef]
- SIG, I.B. The Bluetooth® Low Energy Primer|Bluetooth® Technology Website, White Paper. Available online: https://www.bluetooth.com/wp-content/uploads/2022/05/Bluetooth_LE_Primer_Paper.pdf (accessed on 27 June 2023).
- SIG, I.B. An Introduction to Bluetooth Beacons, White Paper. Available online: http://pages.silabs.com/rs/634-SLU-379/images/Whitepaper-Developing-Beacons-with-Bluetooth-Low-Energy-Technology.pdf (accessed on 28 June 2023).
- Collotta, M.; Pau, G.; Talty, T.; Tonguz, O.K. Bluetooth 5: A Concrete Step Forward toward the IoT. IEEE Commun. Mag. 2018, 56, 125–131. [Google Scholar] [CrossRef]
- Cantón Paterna, V.; Calveras Auge, A.; Paradells Aspas, J.; Perez Bullones, M.A. A bluetooth low energy indoor positioning system with channel diversity, weighted trilateration and kalman filtering. Sensors 2017, 17, 2927. [Google Scholar] [CrossRef]
- Röbesaat, J.; Zhang, P.; Abdelaal, M.; Theel, O. An improved BLE indoor localization with Kalman-based fusion: An experimental study. Sensors 2017, 17, 951. [Google Scholar] [CrossRef] [PubMed]
- Capriglione, D.; Cerro, G.; Ferrigno, L.; Milano, F.; Moschitta, A. A multi-frequency approach to mitigate the performance degradation of a magnetic positioning system under CW disturbance conditions. Measurement 2020, 161, 107842. [Google Scholar] [CrossRef]
- Arbula, D.; Ljubic, S. Indoor Localization Based on Infrared Angle of Arrival Sensor Network. Sensors 2020, 20, 6278. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Rajagopal, N.; Rowe, A.; Sinopoli, B.; Gao, J. Efficient Beacon Placement Algorithms for Time-of-Flight Indoor Localization. In Proceedings of the SIGSPATIAL’19: 27th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 5–8 November 2019; pp. 119–128. [Google Scholar] [CrossRef]
- Yang, B.; Guo, L.; Guo, R.; Zhao, M.; Zhao, T. A Novel Trilateration Algorithm for RSSI-Based Indoor Localization. IEEE Sens. J. 2020, 20, 8164–8172. [Google Scholar] [CrossRef]
- Shao, C.; Roh, H.; Lee, W. BuSAR: Bluetooth Slot Availability Randomization for Better Coexistence With Dense Wi-Fi Networks. IEEE Trans. Mob. Comput. 2021, 20, 846–860. [Google Scholar] [CrossRef]
- Capriglione, D.; Ferrigno, L.; D’Orazio, E.; Paciello, V.; Pietrosanto, A. Reliability analysis of RSSI for localization in small scale WSNs. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 935–940. [Google Scholar] [CrossRef]
- Li, G.; Geng, E.; Ye, Z.; Xu, Y.; Lin, J.; Pang, Y. Indoor Positioning Algorithm Based on the Improved RSSI Distance Model. Sensors 2018, 18, 2820. [Google Scholar] [CrossRef]
- Jain, C.; Sashank, G.V.S.; N, V.; Markkandan, S. Low-cost BLE based Indoor Localization using RSSI Fingerprinting and Machine Learning. In Proceedings of the 2021 Sixth International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 25–27 March 2021; pp. 363–367. [Google Scholar] [CrossRef]
- Jeon, K.E.; She, J.; Soonsawad, P.; Ng, P.C. BLE Beacons for Internet of Things Applications: Survey, Challenges, and Opportunities. IEEE Internet Things J. 2018, 5, 811–828. [Google Scholar] [CrossRef]
- Bluetooth SIG Proprietary. Bluetooth 4.0 Core Specification. Available online: https://www.bluetooth.org/docman/handlers/downloaddoc.ashx?doc_id=456433 (accessed on 4 July 2022).
- Kaduskar, A.; Vengurlekar, O.; Shinde, V. RSSI filtering methods applied to localization using Bluetooth low energy. Int. J. Recent Technol. Eng. (IJRTE) 2020, 9, 2277–3878. [Google Scholar] [CrossRef]
- Qureshi, U.M.; Umair, Z.; Hancke, G.P. Evaluating the Implications of Varying Bluetooth Low Energy (BLE) Transmission Power Levels on Wireless Indoor Localization Accuracy and Precision. Sensors 2019, 19, 3282. [Google Scholar] [CrossRef] [PubMed]
- Zhou, C.; Yuan, J.; Liu, H.; Qiu, J. Bluetooth Indoor Positioning Based on RSSI and Kalman Filter. Wirel. Pers. Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Lagarias, J.C.; Reeds, J.A.; Wright, M.H.; Wright, P.E. Convergence properties of the Nelder–Mead simplex method in low dimensions. SIAM J. Optim. 1998, 9, 112–147. [Google Scholar] [CrossRef]
- EFR32BG13 Blue Gecko Bluetooth® Low Energy SoC Family Data Sheet. Available online: https://www.silabs.com/documents/public/data-sheets/efr32bg13-datasheet.pdf (accessed on 4 July 2022).
- Ferrigno, L.; Milano, F.; Espírito-Santo, A.; Salvado, J.; Laracca, M.; Paciello, V. On the Power Consumption of a Bluetooth Device Operating in Beacon Mode. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–6. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples | Ch 37 | Ch 38 | Ch 39 |
|---|---|---|---|
| 1 | |||
| 2 | |||
| ⋮ | ⋮ | ⋮ | ⋮ |
| i | |||
| ⋮ | ⋮ | ⋮ | ⋮ |
| N |
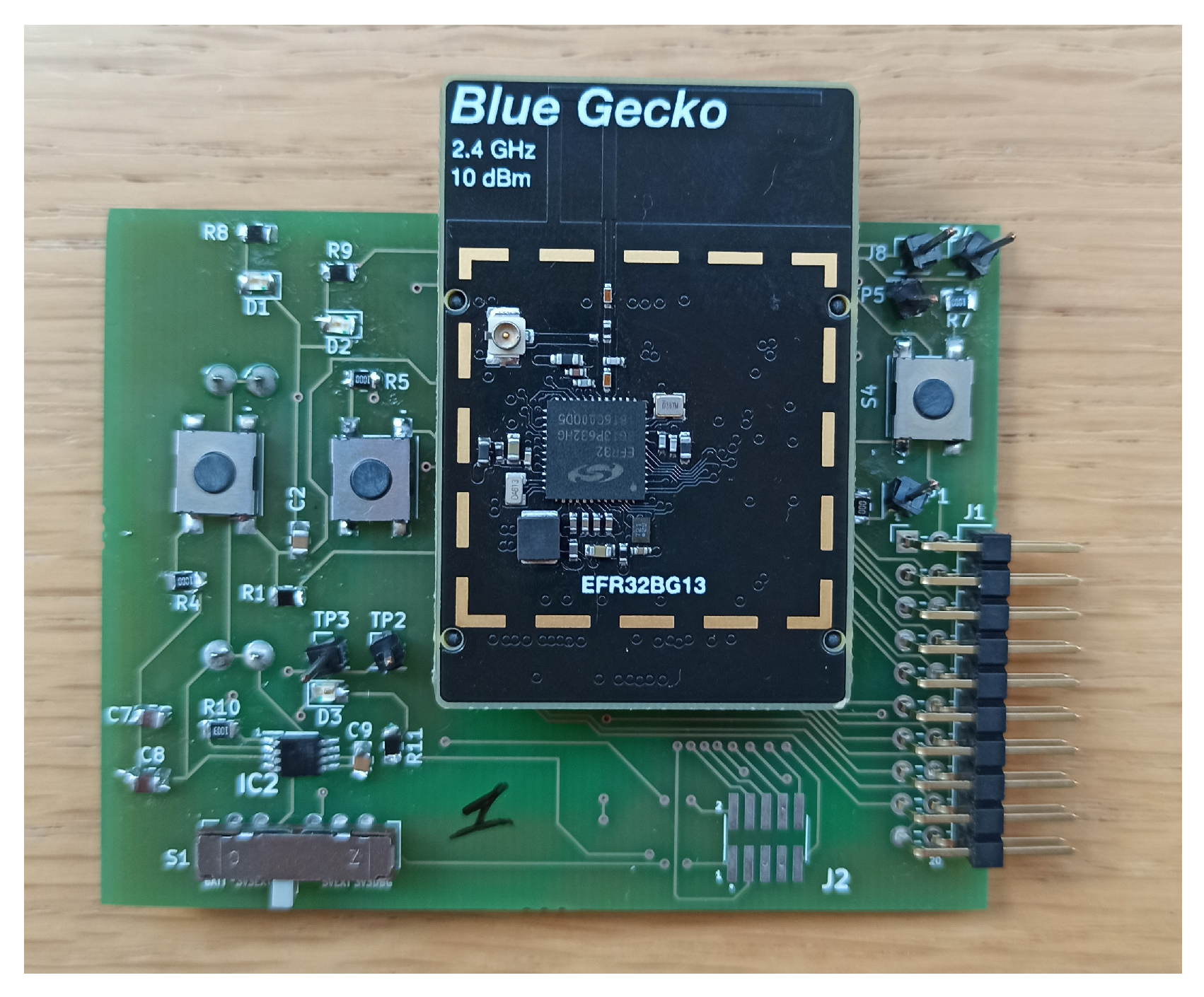
| Device code | EFR32BG13P632F512GM48-D |
| Supported protocol | BLE 5.0 |
| Operating band | 2402–2480 MHz |
| Maximum transmit power | +10 dBm |
| Sensitivity () | −94 dBm |
| Integrated antenna | Printed inverted–F |
| MCU | 32–bit 40 MHz ARM Cortex–M4 |
| Flash memory | 512 kB |
| RAM | 64 kB |
| Main integrated functionality | Debug and packet trace; Advanced Energy Monitoring; Virtual COM Port |
| Anchors | x [m] | y [m] |
|---|---|---|
| A1 | 0 | 0 |
| A2 | 2.5 | 0 |
| A3 | 5 | 0 |
| A4 | 5 | 3 |
| A5 | 2.5 | 6 |
| A6 | 0 | 3 |
| Observation | MSE [m2] | R2 | |
|---|---|---|---|
| Training | 1098 | 4.3666 × 107 | 1.0000 |
| Validation | 235 | 1.1190 × 10−5 | 1.0000 |
| Test | 235 | 6.1233 × 10−5 | 1.0000 |
| Observation | MSE [m2] | R2 | |
|---|---|---|---|
| Training | 1098 | 4.9483 × 10−4 | 0.9999 |
| Validation | 235 | 8.3280 × 10−4 | 0.9998 |
| Test | 235 | 9.0197 × 10−4 | 0.9998 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Milano, F.; da Rocha, H.; Laracca, M.; Ferrigno, L.; Espírito Santo, A.; Salvado, J.; Paciello, V. BLE-Based Indoor Localization: Analysis of Some Solutions for Performance Improvement. Sensors 2024, 24, 376. https://doi.org/10.3390/s24020376
Milano F, da Rocha H, Laracca M, Ferrigno L, Espírito Santo A, Salvado J, Paciello V. BLE-Based Indoor Localization: Analysis of Some Solutions for Performance Improvement. Sensors. 2024; 24(2):376. https://doi.org/10.3390/s24020376
Chicago/Turabian StyleMilano, Filippo, Helbert da Rocha, Marco Laracca, Luigi Ferrigno, António Espírito Santo, José Salvado, and Vincenzo Paciello. 2024. "BLE-Based Indoor Localization: Analysis of Some Solutions for Performance Improvement" Sensors 24, no. 2: 376. https://doi.org/10.3390/s24020376
APA StyleMilano, F., da Rocha, H., Laracca, M., Ferrigno, L., Espírito Santo, A., Salvado, J., & Paciello, V. (2024). BLE-Based Indoor Localization: Analysis of Some Solutions for Performance Improvement. Sensors, 24(2), 376. https://doi.org/10.3390/s24020376