
Seismic Monitoring of a Deep Geothermal Field in Munich (Germany) Using Borehole Distributed Acoustic Sensing


Abstract
1. Introduction
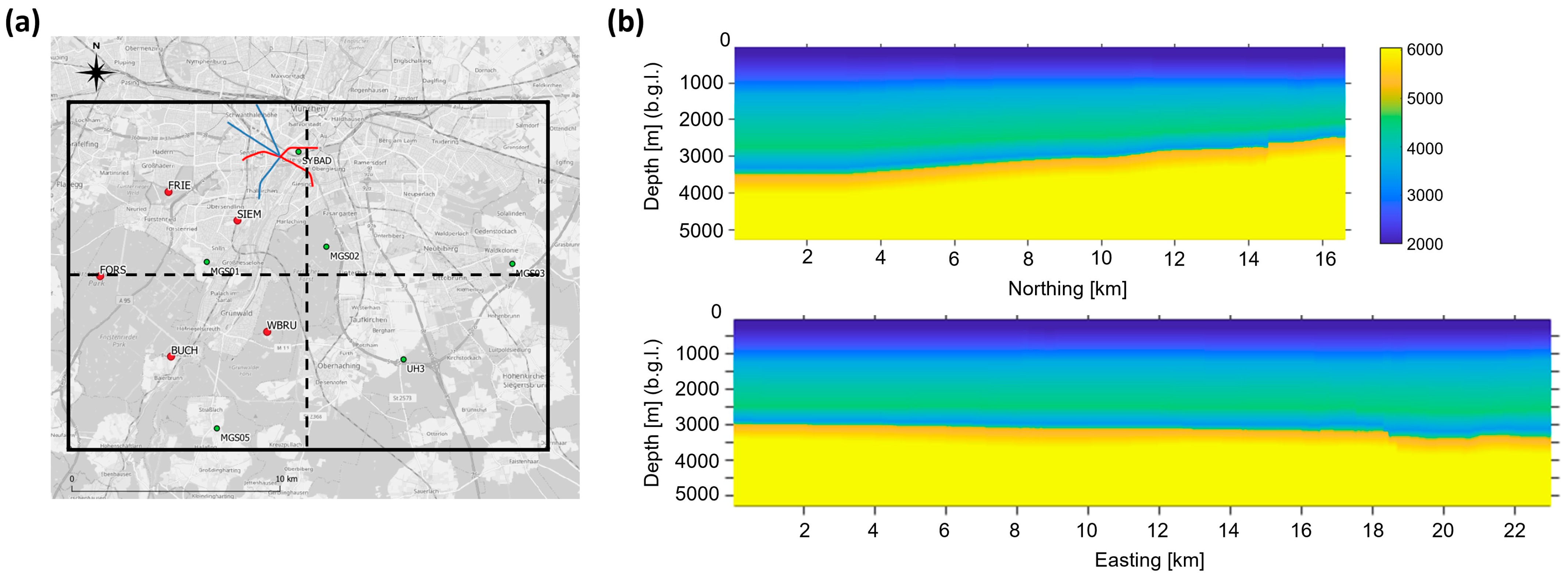
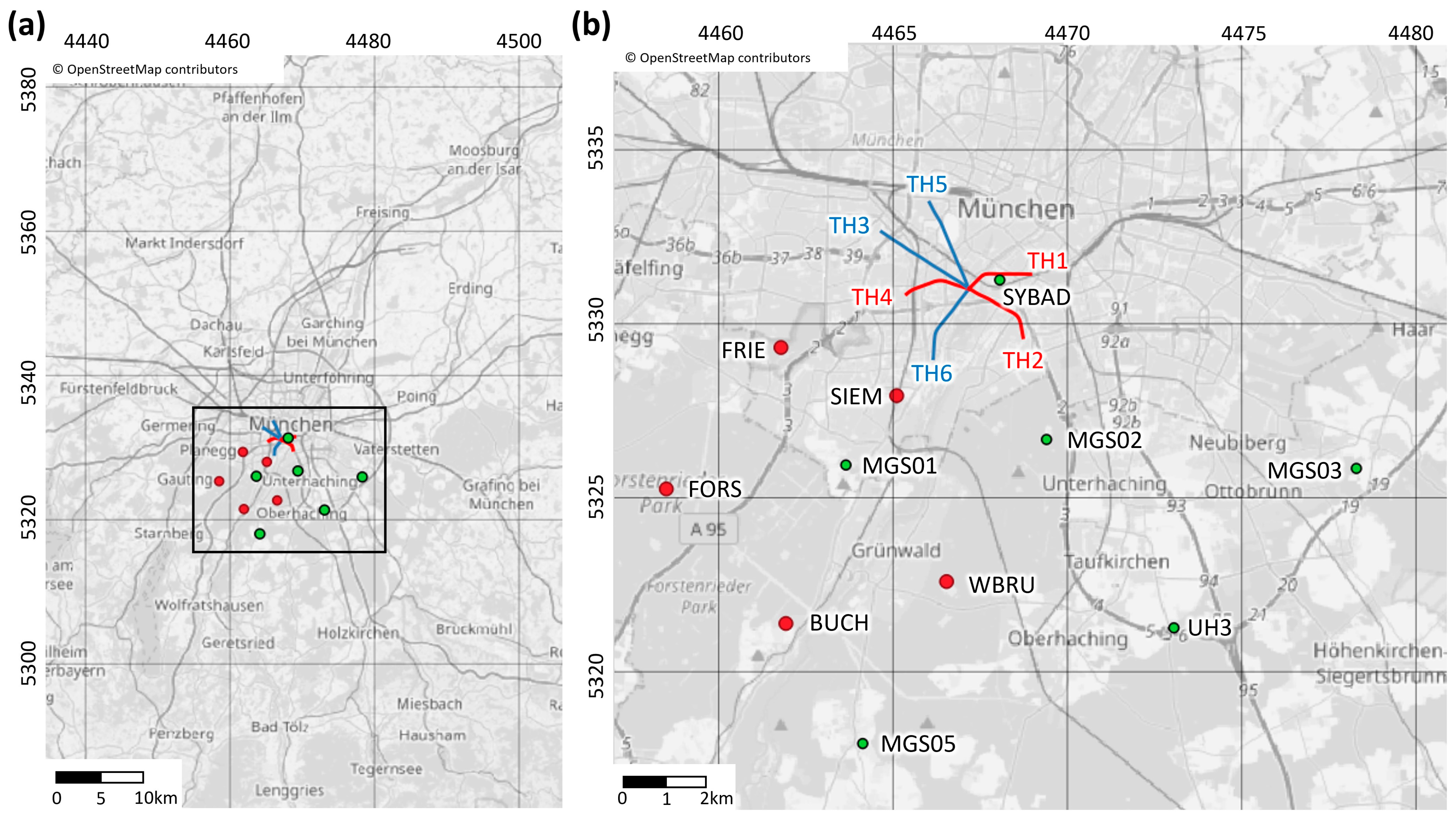
2. Study Site and Monitoring Infrastructure
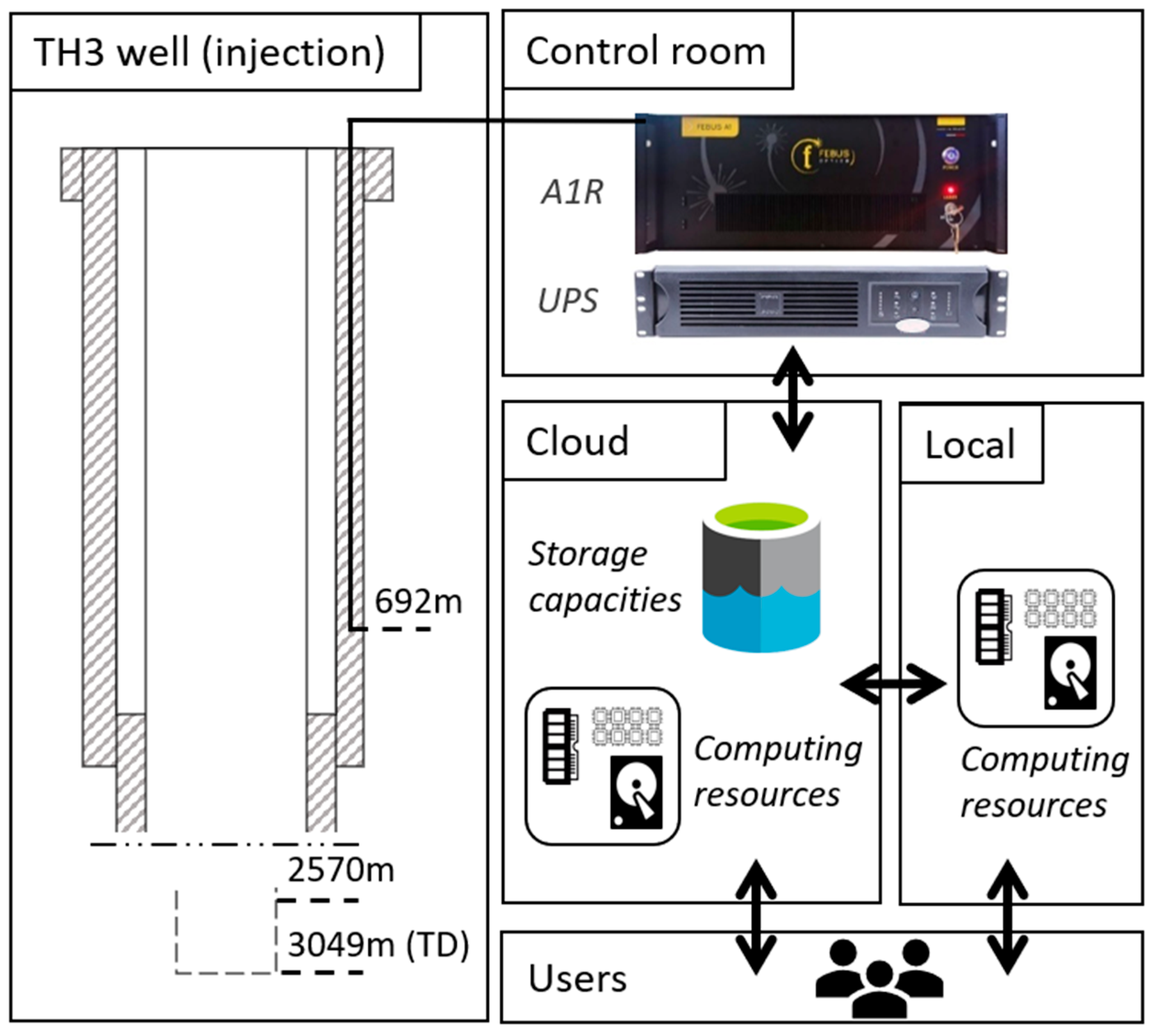
2.1. Geothermal Field and Setup for Fiber Optic Sensing
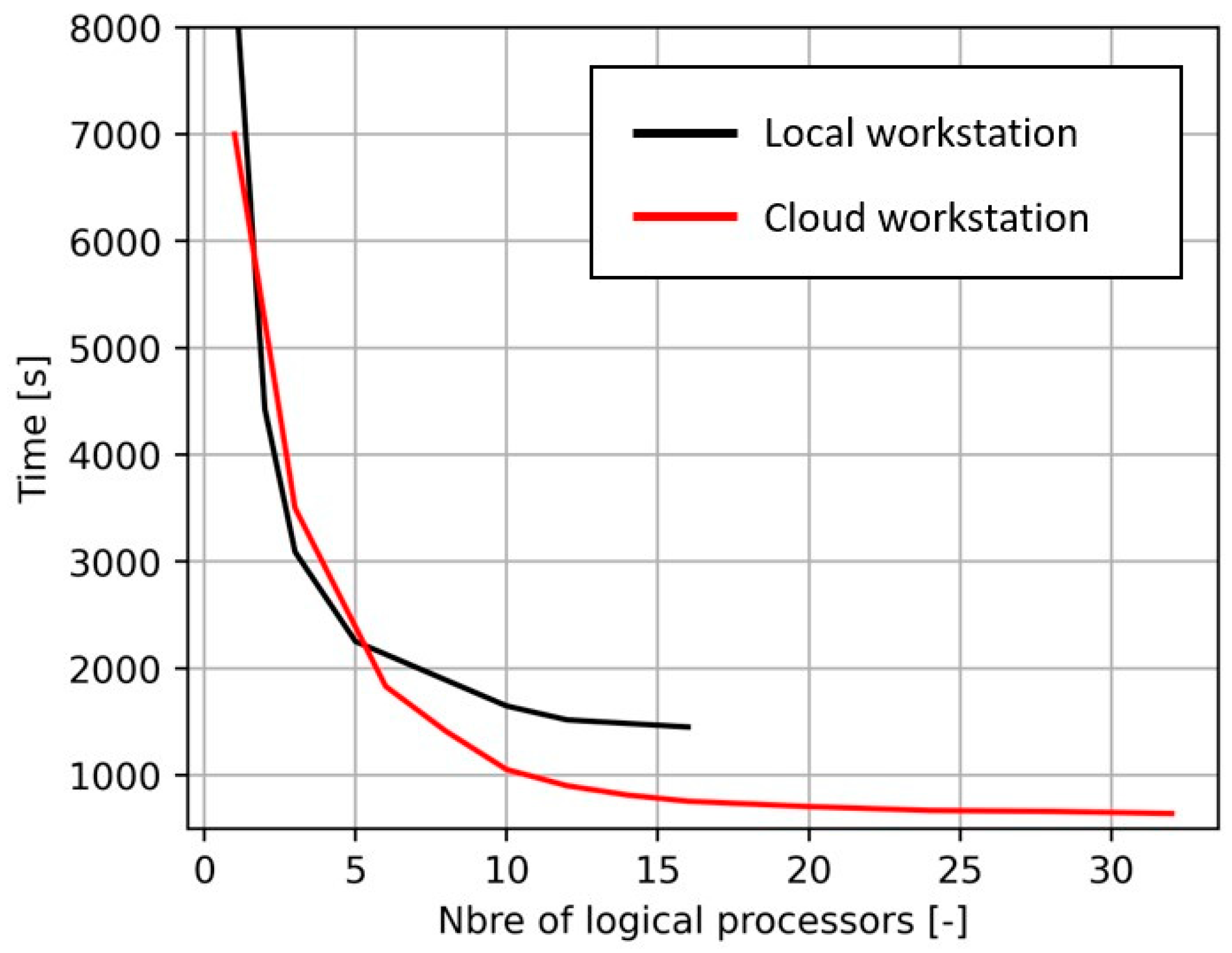
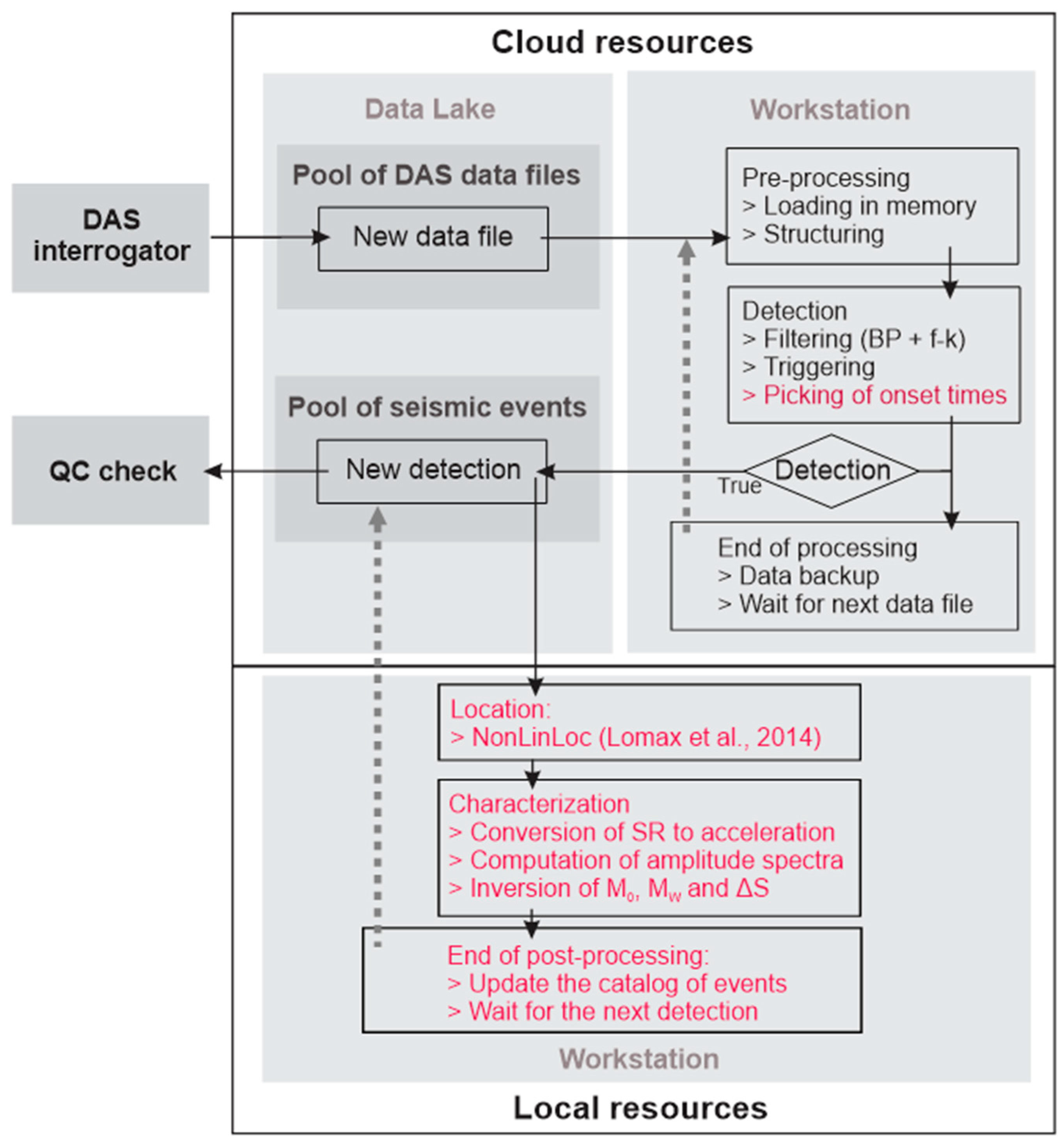
2.2. Infrastructure for Data Saving and Processing
- It should guarantee reliable and secure connectivity for data transmission and protection.
- It should have sufficient storage capacity and efficient data management systems to handle the large volume of data generated.
- It should feature computational capabilities for data processing and analyses, providing quasi-real-time processing capabilities.
- Additionally, the infrastructure should be scalable to accommodate forthcoming technological advancements, methodological innovations, and the evolving requirements set forth by the operator.
3. Seismic Processing Workflow
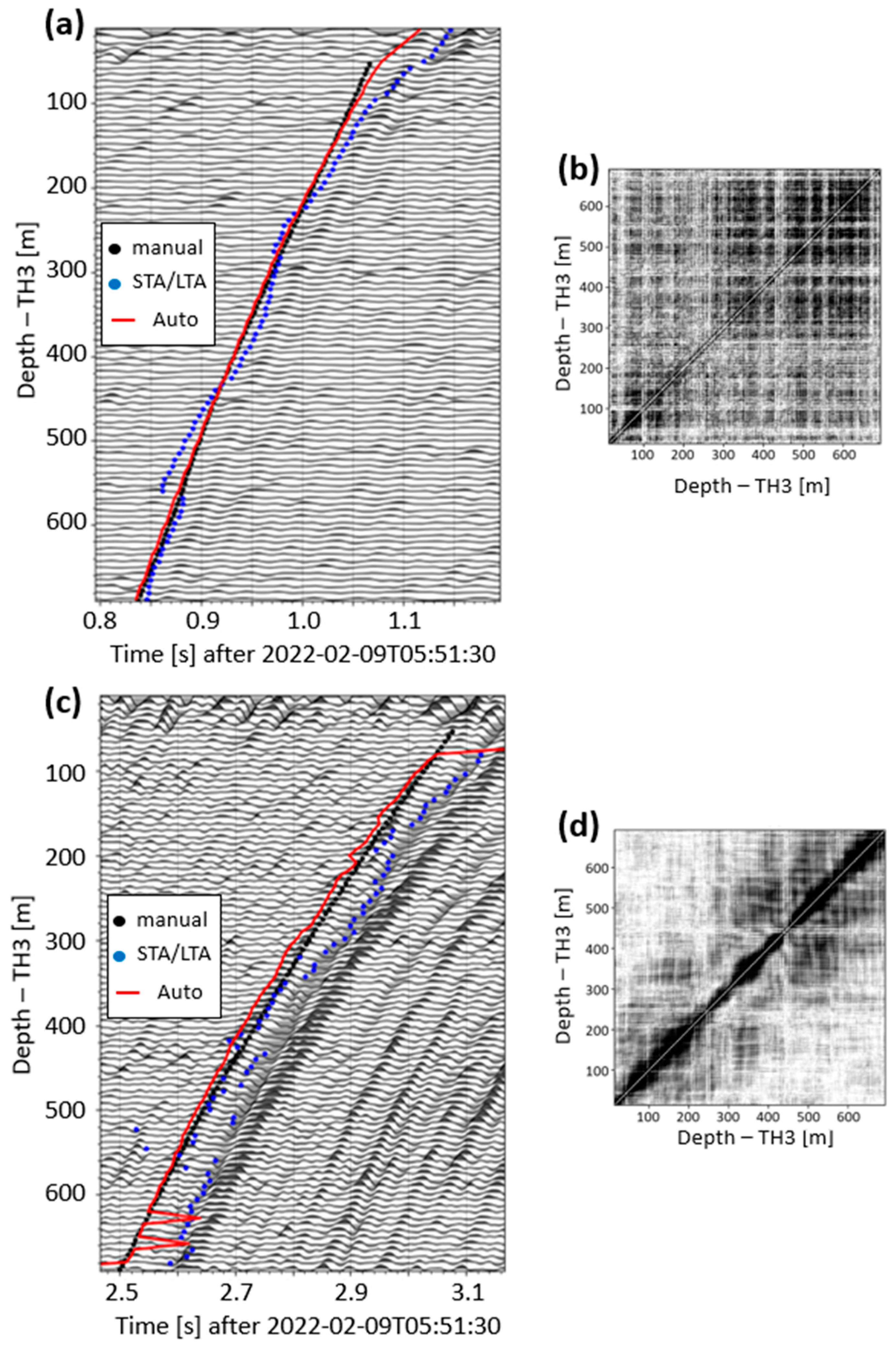
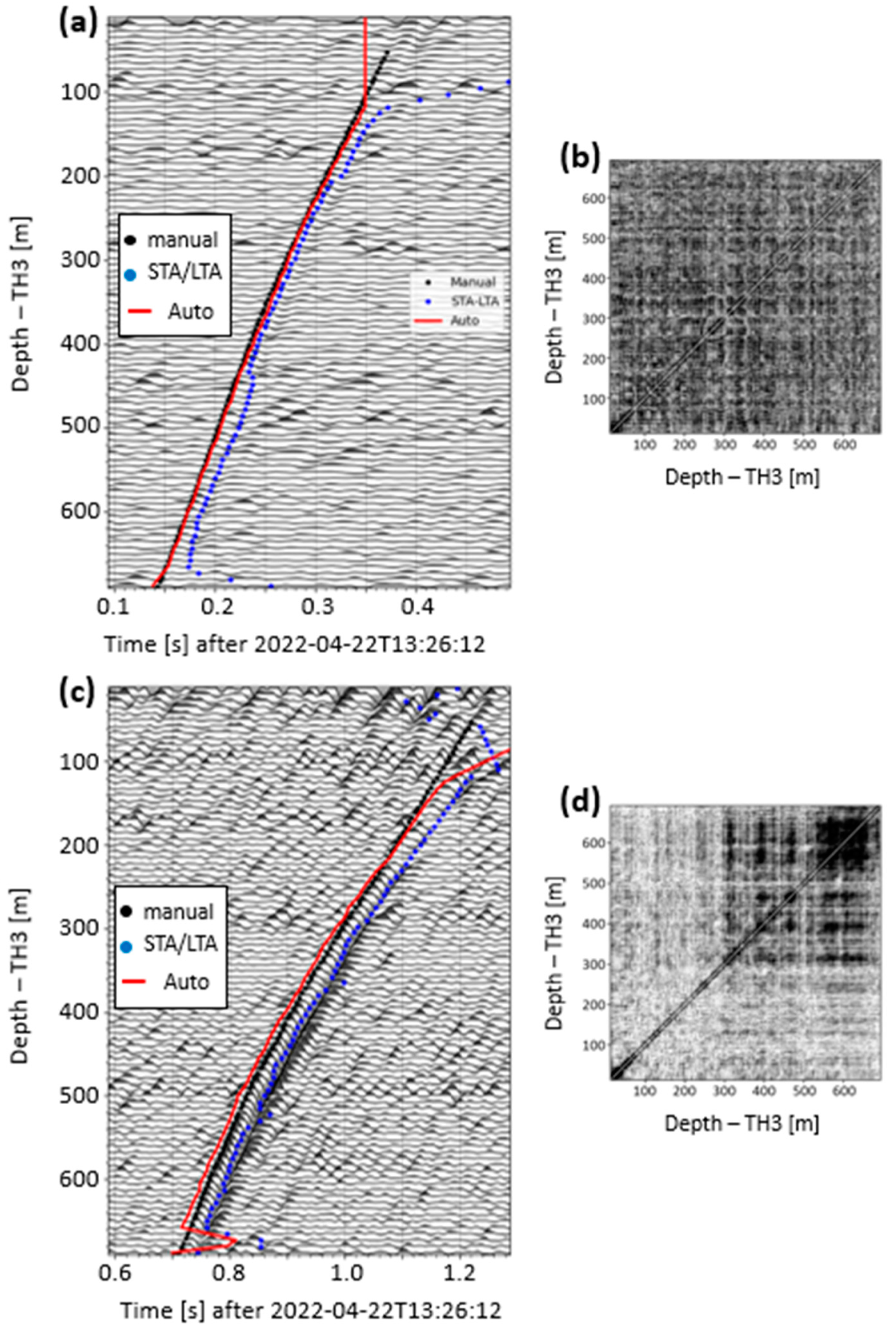
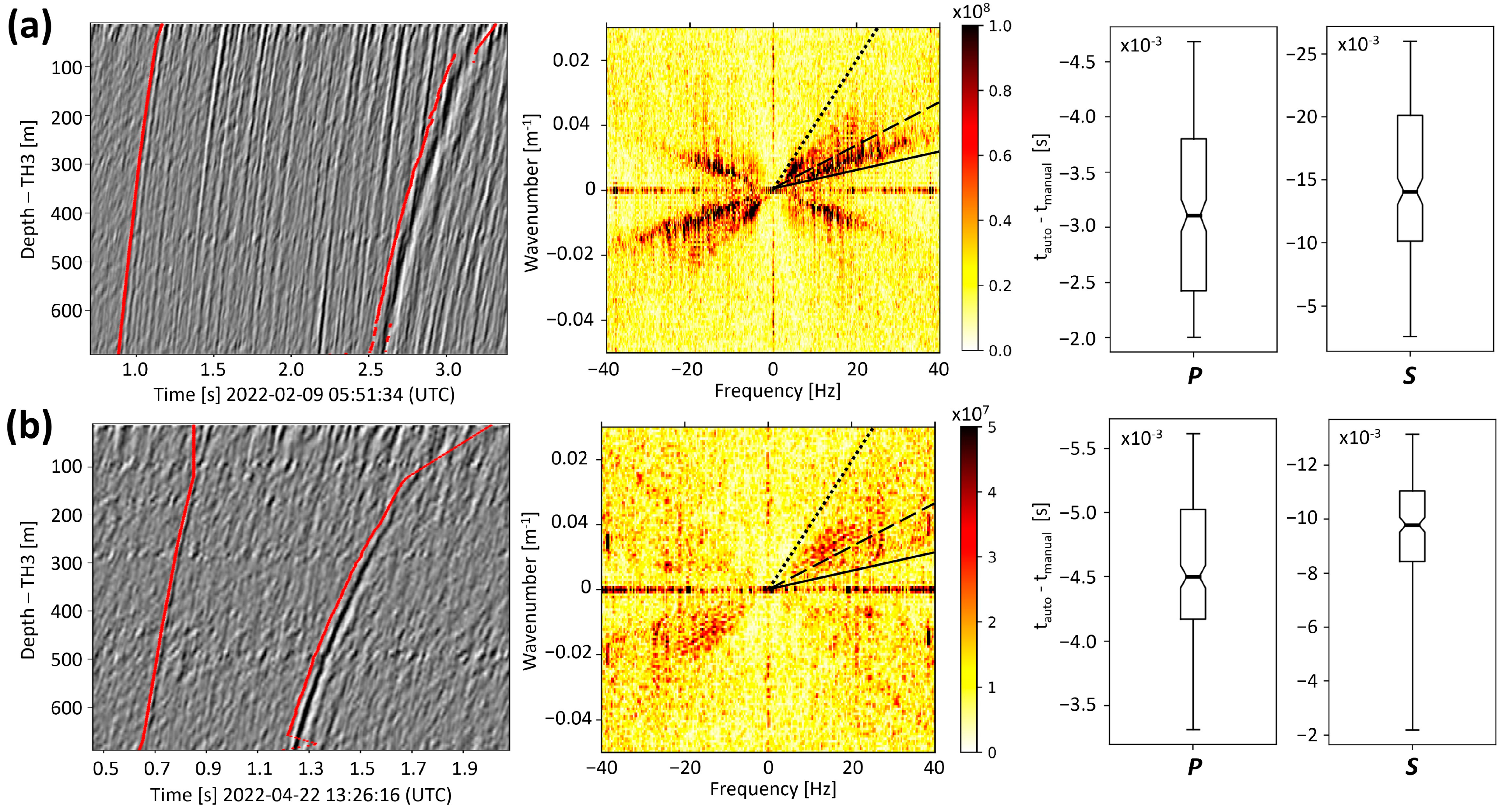
3.1. Event Detection and Automated P- and S-Wave Arrival-Time Picking
3.2. Seismic Source Characterization
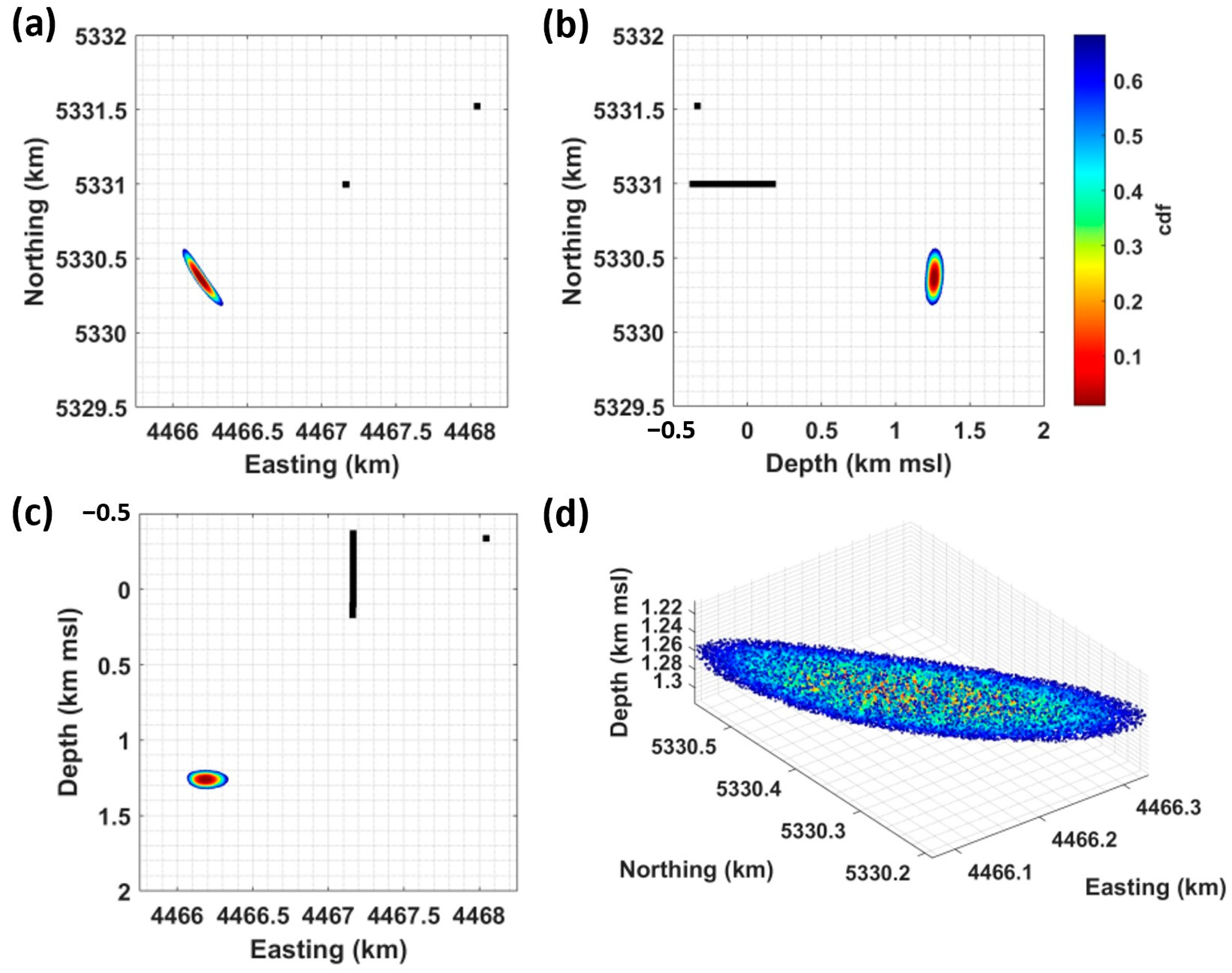
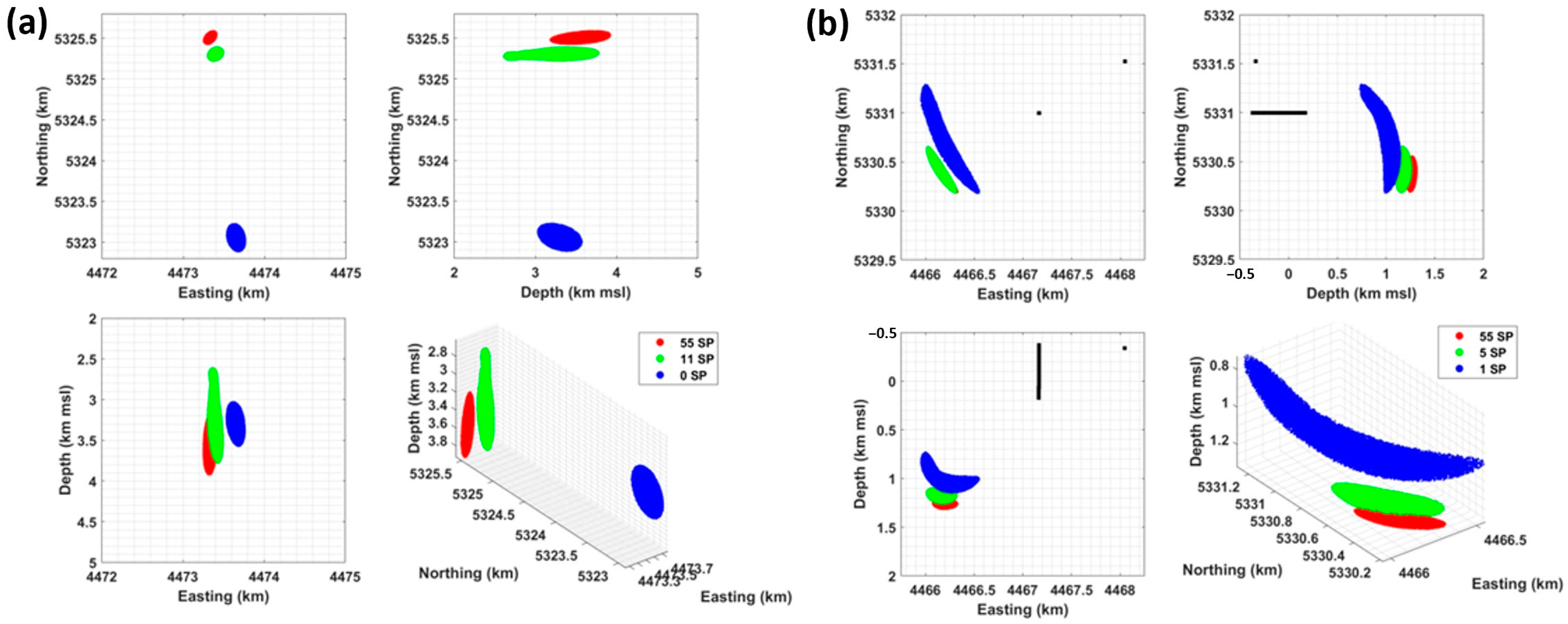
3.2.1. Event Location
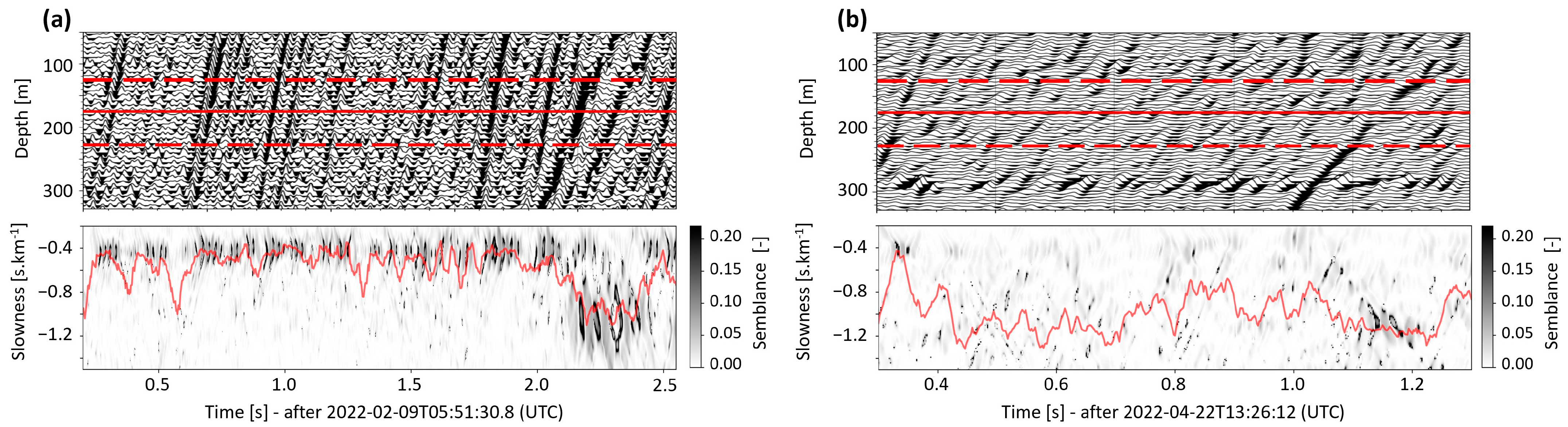
3.2.2. DAS Strain-Rate Data Conversion
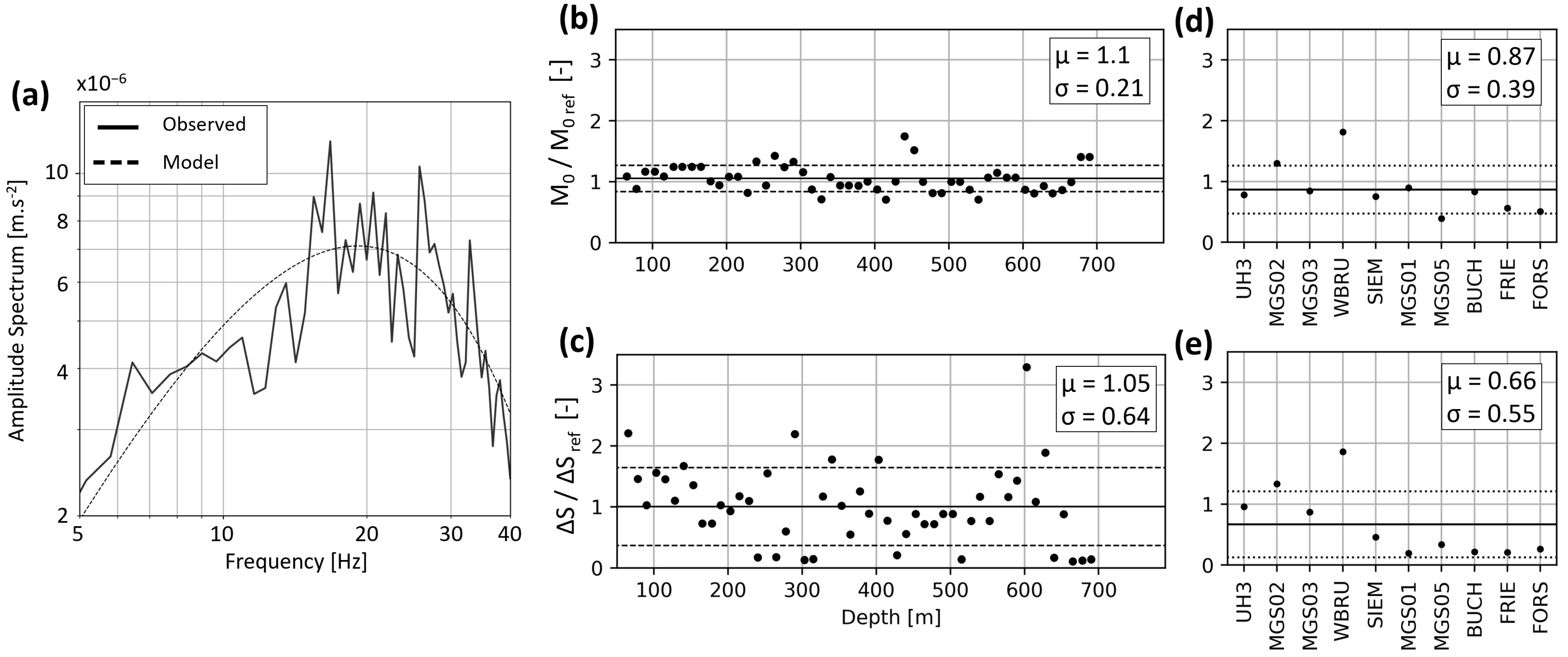
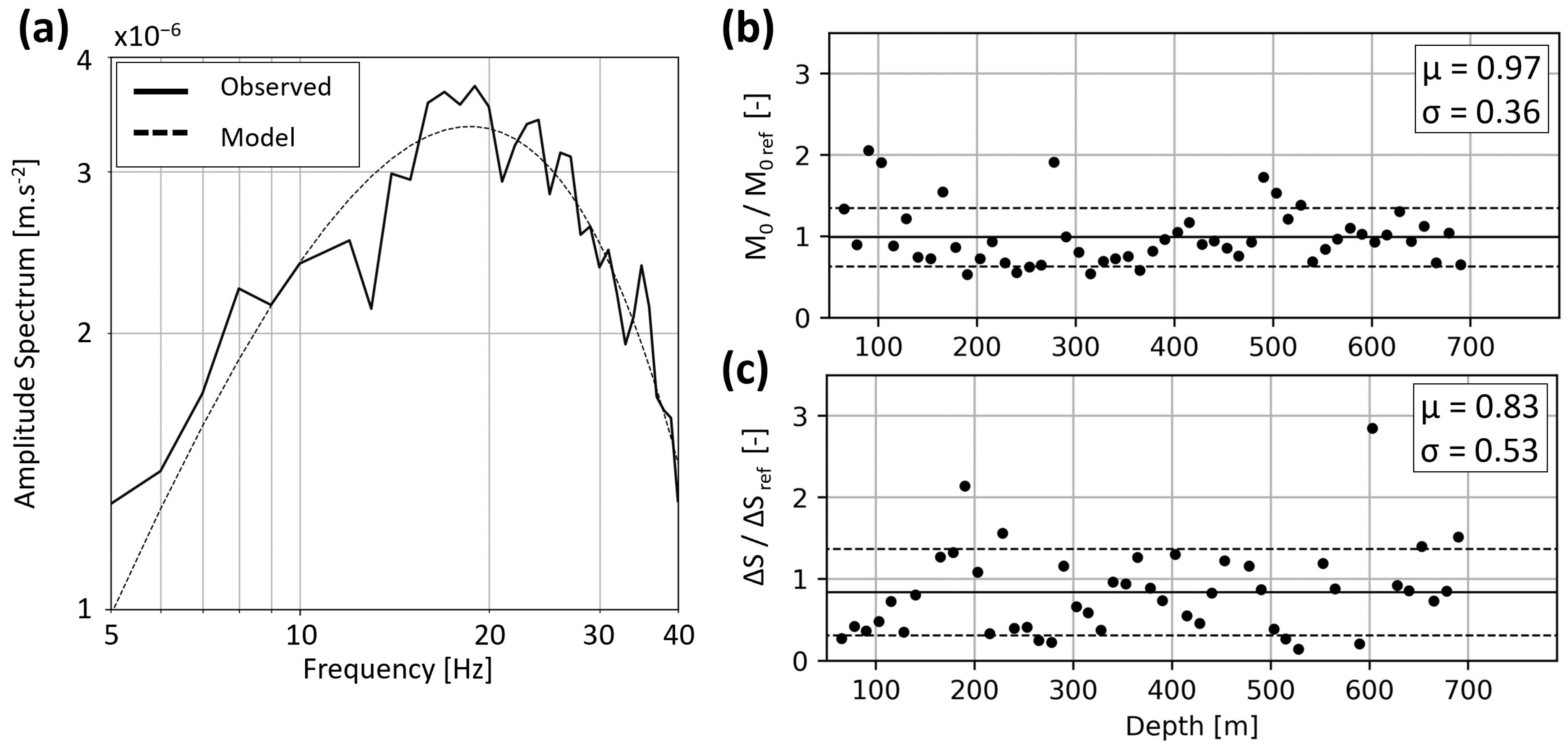
3.2.3. Source Parameters Evaluation
4. Results
4.1. Picking of Arrival-Times
4.2. Event Location
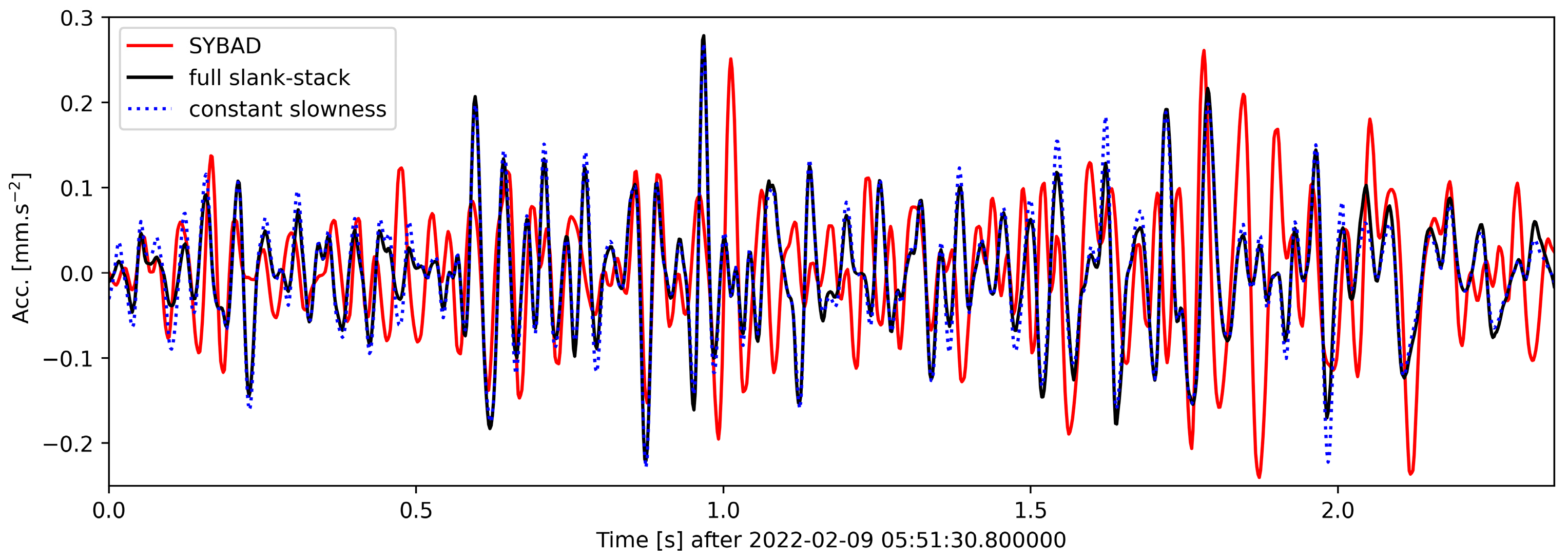
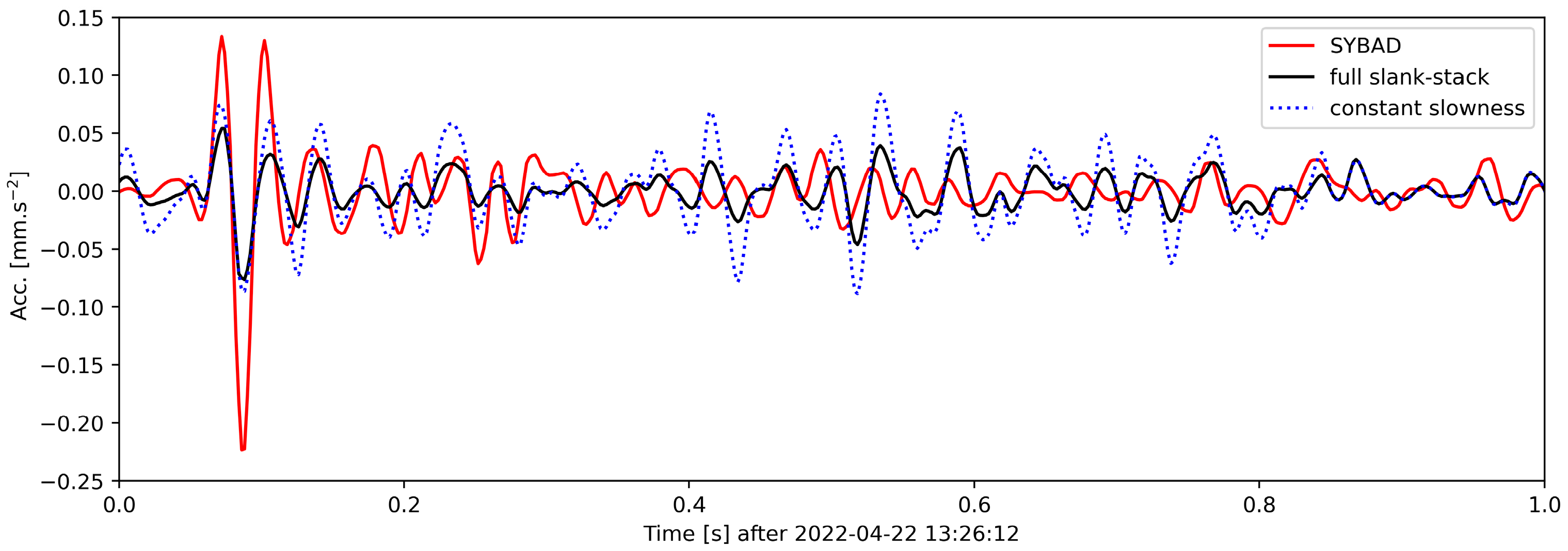
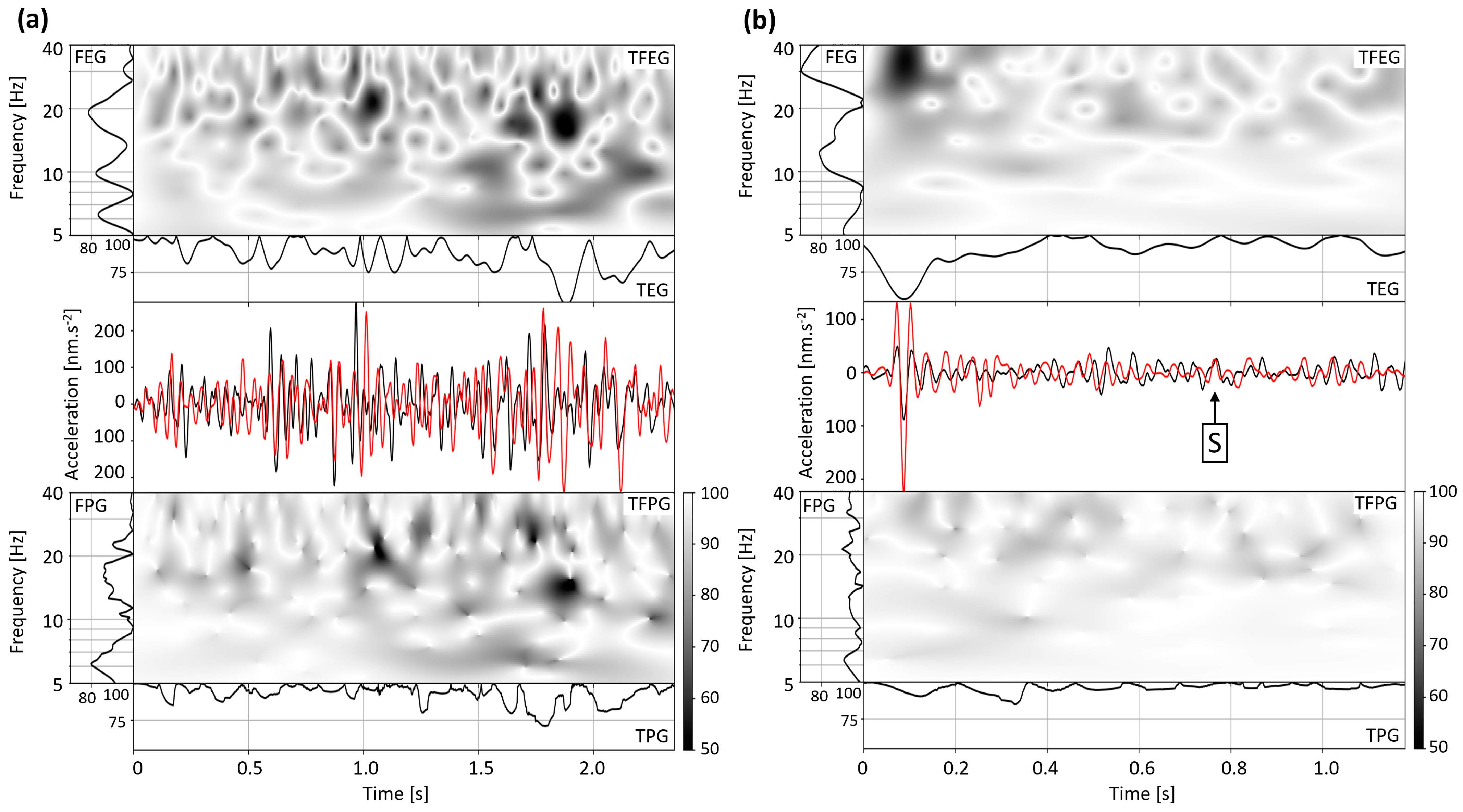
4.3. Strain-Rate to Acceleration
4.4. Seismic Source Parameters
5. Discussion
5.1. Event Location
5.2. Assessment of DAS-Based Acceleration
5.3. Implications for Seismic Monitoring Systems
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event | Type of Processing | Phase GOF | Envelope GOF |
|---|---|---|---|
| 9 February | From semblance matrix | 56 | 55 |
| Constant slowness | 52 | 51 | |
| 22 April | From semblance matrix | 70 | 53 |
| Constant slowness | 65 | 45 |
References
- Kraft, T.; Wassermann, J.; Deichmann, N.; Stange, S. The 2008 Earthquakes in the Bavarian Molasse Basin—Possible Relation to Deep Geothermics? EGU General Assembly: Vienna, Austria, 2019; Volume 11, p. 1. [Google Scholar]
- Megies, T.; Wassermann, J. Microseismicity Observed at a Non-Pressure-Stimulated Geothermal Power Plant. Geothermics 2014, 52, 36–49. [Google Scholar] [CrossRef]
- Seithel, R.; Gaucher, E.; Mueller, B.; Steiner, U.; Kohl, T. Probability of Fault Reactivation in the Bavarian Molasse Basin. Geothermics 2019, 82, 81–90. [Google Scholar] [CrossRef]
- Agemar, T.; Weber, J.; Schulz, R. Deep Geothermal Energy Production in Germany. Energies 2014, 7, 4397–4416. [Google Scholar] [CrossRef]
- Dussel, M.; Lüschen, E.; Thomas, R.; Agemar, T.; Fritzer, T.; Sieblitz, S.; Huber, B.; Birner, J.; Schulz, R. Forecast for Thermal Water Use from Upper Jurassic Carbonates in the Munich Region (South German Molasse Basin). Geothermics 2016, 60, 13–30. [Google Scholar] [CrossRef]
- Cröniger, C.; Tretter, R.; Eichenseer, P.; Kleinertz, B.; Timpe, C.; Bürger, V.; Cludius, J. Approach to Climate Neutral Heat Supply in Munich 2035. In Proceedings of the European Geothermal Congress 2022, Berlin, Germany, 17–21 October 2022. [Google Scholar]
- Gaucher, E.; Hansinger, M.; Goblirsch, P.; Azzola, J.; Thiemann, K. Towards a Geothermal Reservoir Management System. In Proceedings of the European Geothermal Congress 2022, Berlin, Germany, 17–21 October 2022. [Google Scholar]
- Koelman, J.M.; Lopez, J.L.; Potters, J.H. Optical Fibers: The Neurons For Future Intelligent Wells. In Proceedings of the All Days, Utrecht, The Netherlands, 27–29 March 2012; SPE: Utrecht, The Netherlands, 2012; p. SPE-150203-MS. [Google Scholar]
- Koelman, J.V. Fiber-Optic Sensing Technology Providing Well, Reservoir Information—Anyplace, Anytime. J. Pet. Technol. 2011, 63, 22–24. [Google Scholar] [CrossRef]
- Van Der Horst, J.; Lopez, J.L.; Berlang, W.; Potters, H. In-Well Distributed Fiber Optic Solutions for Reservoir Surveillance. In Proceedings of the All Days, Houston, TX, USA, 6–9 May 2013; OTC: Houston, TX, USA, 2013; p. OTC-23949-MS. [Google Scholar]
- Lindsey, N.J.; Rademacher, H.; Ajo-Franklin, J.B. On the Broadband Instrument Response of Fiber-Optic DAS Arrays. J. Geophys. Res. Solid Earth 2020, 125, e2019JB018145. [Google Scholar] [CrossRef]
- Hartog, A.; Kotov, O.I.; Liokumovich, L.B. The Optics of Distributed Vibration Sensing; European Association of Geoscientists & Engineers: Stavanger, Norway, 2013. [Google Scholar]
- Masoudi, A.; Newson, T.P. Contributed Review: Distributed Optical Fibre Dynamic Strain Sensing. Rev. Sci. Instrum. 2016, 87, 011501. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Karrenbach, M.; Ajo-Franklin, J.B. A Literature Review. In Distributed Acoustic Sensing in Geophysics; American Geophysical Union (AGU): Washington, DC, USA, 2021; pp. 229–291. ISBN 978-1-119-52180-8. [Google Scholar]
- Lellouch, A.; Biondi, B.L. Seismic Applications of Downhole DAS. Sensors 2021, 21, 2897. [Google Scholar] [CrossRef] [PubMed]
- Reinsch, T.; Thurley, T.; Jousset, P. On the Mechanical Coupling of a Fiber Optic Cable Used for Distributed Acoustic/Vibration Sensing Applications—A Theoretical Consideration. Meas. Sci. Technol. 2017, 28, 127003. [Google Scholar] [CrossRef]
- Azzola, J.; Thiemann, K.; Gaucher, E. Integration of distributed acoustic sensing for real-time seismic monitoring of a geothermal field. Geotherm. Energy 2023, 11, 30. [Google Scholar] [CrossRef]
- Pankow, K.; Mesimeri, M.; Mclennan, J.; Wannamaker, P.; Moore, J. Seismic Monitoring at the Utah Frontier Observatory for Research in Geothermal Energy. In Proceedings of the 45th Workshop on Geothermal Reservoir Engineering, Stanford, CA, USA, 10–12 February 2020. [Google Scholar]
- Isken, M.P.; Vasyura-Bathke, H.; Dahm, T.; Heimann, S. De-Noising Distributed Acoustic Sensing Data Using an Adaptive Frequency–Wavenumber Filter. Geophys. J. Int. 2022, 231, 944–949. [Google Scholar] [CrossRef]
- Lellouch, A.; Yuan, S.; Ellsworth, W.L.; Biondi, B. Velocity-Based Earthquake Detection Using Downhole Distributed Acoustic Sensing—Examples from the San Andreas Fault Observatory at Depth. Bull. Seismol. Soc. Am. 2019, 109, 2491–2500. [Google Scholar] [CrossRef]
- Li, Z.; Zhan, Z. Pushing the Limit of Earthquake Detection with Distributed Acoustic Sensing and Template Matching: A Case Study at the Brady Geothermal Field. Geophys. J. Int. 2018, 215, 1583–1593. [Google Scholar] [CrossRef]
- Schölderle, F.; Lipus, M.; Pfrang, D.; Reinsch, T.; Haberer, S.; Einsiedl, F.; Zosseder, K. Monitoring Cold Water Injections for Reservoir Characterization Using a Permanent Fiber Optic Installation in a Geothermal Production Well in the Southern German Molasse Basin. Geotherm Energy 2021, 9, 21. [Google Scholar] [CrossRef]
- Brune, J.N. Tectonic Stress and the Spectra of Seismic Shear Waves from Earthquakes. J. Geophys. Res. 1970, 75, 4997–5009. [Google Scholar] [CrossRef]
- Madariaga, R. Dynamics of an Expanding Circular Fault. Bull. Seismol. Soc. Am. 1976, 66, 639–666. [Google Scholar] [CrossRef]
- Paitz, P.; Edme, P.; Gräff, D.; Walter, F.; Doetsch, J.; Chalari, A.; Schmelzbach, C.; Fichtner, A. Empirical Investigations of the Instrument Response for Distributed Acoustic Sensing (DAS) across 17 Octaves. Bull. Seismol. Soc. Am. 2021, 111, 1–10. [Google Scholar] [CrossRef]
- Agemar, T.; Schellschmidt, R.; Schulz, R. Subsurface Temperature Distribution in Germany. Geothermics 2012, 44, 65–77. [Google Scholar] [CrossRef]
- Schulz, R.; Jobmann, M. Hydrogeothermische Energiebilanz und Grundwasserhaushalt des Malmkarstes im Süddeutschen Molassebecken, Teilgebiet: Hydrogeothermik; Final Report; Institut für Geowissenschaftliche Gemeinschaftsaufgaben (GGA): Hannover, Germany, 1989; Archive Number 105040. [Google Scholar]
- Böhm, F.; Savvatis, A.; Steiner, U.; Schneider, M.; Koch, R. Lithofazielle Reservoircharakterisierung zur geothermischen Nutzung des Malm im Großraum München. Grundwasser 2013, 18, 3–13. [Google Scholar] [CrossRef]
- Department of Earth and Environmental Sciences, Geophysical Observatory, University of Munchen. BayernNetz (BH) Seismic Network, International Federation of Digital Seismograph Networks, 2001. [CrossRef]
- Lomax, A.; Virieux, J.; Volant, P.; Berge-Thierry, C. Probabilistic Earthquake Location in 3D and Layered Models. In Advances in Seismic Event Location; Thurber, C.H., Rabinowitz, N., Eds.; Modern Approaches in Geophysics; Springer: Dordrecht, The Netherlands, 2000; Volume 18, pp. 101–134. ISBN 978-90-481-5498-2. [Google Scholar]
- Lomax, A.; Michelini, A.; Curtis, A. Earthquake Location, Direct, Global-Search Methods. In Encyclopedia of Complexity and Systems Science; Meyers, R.A., Ed.; Springer: New York, NY, USA, 2014; pp. 1–33. ISBN 978-3-642-27737-5. [Google Scholar]
- Beyreuther, M.; Barsch, R.; Krischer, L.; Megies, T.; Behr, Y.; Wassermann, J. ObsPy: A Python Toolbox for Seismology. Seismol. Res. Lett. 2010, 81, 530–533. [Google Scholar] [CrossRef]
- Butterworth, S. On the Theory of Filter Amplifiers. Exp. Wirel. Wirel. Eng. 1930, 7, 536–541. [Google Scholar]
- Maurer, V.; Gaucher, E.; Grunberg, M.; Koepke, R.; Pestourie, R.; Cuenot, N. Seismicity Induced during the Development of the Rittershoffen Geothermal Field, France. Geotherm Energy 2020, 8, 5. [Google Scholar] [CrossRef]
- Duncan, G.; Beresford, G. Slowness Adaptive F-k Filtering of Prestack Seismic Data. Geophysics 1994, 59, 140–147. [Google Scholar] [CrossRef]
- Zhirnov, A.A.; Stepanov, K.V.; Chernutsky, A.O.; Fedorov, A.K.; Nesterov, E.T.; Svelto, C.; Pnev, A.B.; Karasik, V.E. Influence of the Laser Frequency Drift in Phase-Sensitive Optical Time Domain Reflectometry. Opt. Spectrosc. 2019, 127, 656–663. [Google Scholar] [CrossRef]
- Trnkoczy, A. Understanding and Parameter Setting of STA/LTA Trigger Algorithm. In New Manual of Seismological Observatory Practice (NMSOP); Bormann, P., Ed.; Deutsches GeoForschungsZentrum GFZ: Potsdam, Germany, 2012. [Google Scholar]
- Withers, M.; Aster, R.; Young, C.; Beiriger, J.; Harris, M.; Moore, S.; Trujillo, J. A Comparison of Select Trigger Algorithms for Automated Global Seismic Phase and Event Detection. Bull. Seismol. Soc. Am. 1998, 88, 95–106. [Google Scholar] [CrossRef]
- SAGE: MiniSEED Standard. Available online: https://ds.iris.edu/ds/nodes/dmc/data/formats/miniseed/ (accessed on 7 May 2024).
- Lomax, A.; Curtis, A. Fast, Probabilistic Earthquake Location in 3D Models Using Oct-Tree Importance Sampling. Geophys. Res. Abstr. 2001, 3, 10–1007. [Google Scholar]
- Tarantola, A.; Valette, B. Inverse Problems = Quest for Information. J. Geophys. 1981, 50, 159–170. [Google Scholar]
- Moser, T.J.; van Eck, T.; Nolet, G. Hypocenter Determination in Strongly Heterogeneous Earth Models Using the Shortest Path Method. J. Geophys. Res. 1992, 97, 6563–6572. [Google Scholar] [CrossRef]
- Boatwright, J. A Spectral Theory for Circular Seismic Sources; Simple Estimates of Source Dimension, Dynamic Stress Drop, and Radiated Seismic Energy. Bull. Seismol. Soc. Am. 1980, 70, 1–27. [Google Scholar] [CrossRef]
- Van den Ende, M.P.A.; Ampuero, J.-P. Evaluating Seismic Beamforming Capabilities of DistributedAcoustic Sensing Arrays; Crustal structure and composition/Seismics, seismology, geoelectrics, and electromagnetics/Seismology. Solid Earth 2020, 12, 915–934. [Google Scholar] [CrossRef]
- Lior, I.; Sladen, A.; Mercerat, D.; Ampuero, J.-P.; Rivet, D.; Sambolian, S. Strain to Ground Motion Conversion of Distributed Acoustic Sensing Data for Earthquake Magnitude and Stress Drop Determination. Solid Earth 2021, 12, 1421–1442. [Google Scholar] [CrossRef]
- Anderson, J.G.; Hough, S.E. A Model for the Shape of the Fourier Amplitude Spectrum of Acceleration at High Frequencies. Bull. Seismol. Soc. Am. 1984, 74, 1969–1993. [Google Scholar] [CrossRef]
- Hanks, T.C.; Kanamori, H. A Moment Magnitude Scale. J. Geophys. Res. Solid Earth 1979, 84, 2348–2350. [Google Scholar] [CrossRef]
- Eshelby, J.D.; Peierls, R.E. The Determination of the Elastic Field of an Ellipsoidal Inclusion, and Related Problems. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1957, 241, 376–396. [Google Scholar] [CrossRef]
- Wadati, K.; Oki, S. On the Travel Time of Earthquake Waves. (Part II). J. Meteorol. Soc. Jpn. 1933, 11, 14–28. [Google Scholar] [CrossRef]
- Kinnaert, X.; Gaucher, E.; Kohl, T.; Achauer, U. Contribution of the Surface and Down-Hole Seismic Networks to the Location of Earthquakes at the Soultz-Sous-Forêts Geothermal Site (France). Pure Appl. Geophys. 2018, 175, 757–772. [Google Scholar] [CrossRef]
- Kinnaert, X.; Gaucher, E.; Achauer, U.; Kohl, T. Modelling Earthquake Location Errors at a Reservoir Scale: A Case Study in the Upper Rhine Graben. Geophys. J. Int. 2016, 206, 861–879. [Google Scholar] [CrossRef]
- Toledo, T.; Gaucher, E.; Jousset, P.; Jentsch, A.; Haberland, C.; Maurer, H.; Krawczyk, C.; Calò, M.; Figueroa, A. Local Earthquake Tomography at Los Humeros Geothermal Field (Mexico). JGR Solid Earth 2020, 125, e2020JB020390. [Google Scholar] [CrossRef]
- Bardainne, T.; Gaucher, E. Constrained Tomography of Realistic Velocity Models in Microseismic Monitoring Using Calibration Shots. Geophys. Prospect. 2010, 58, 739–753. [Google Scholar] [CrossRef]
- Willis, M.E.; Ellmauthaler, A.; Wu, X.; LeBlanc, M.J. Important Aspects of Acquiring Distributed Acoustic Sensing (DAS) Data for Geoscientists. In Geophysical Monograph Series; Li, Y., Karrenbach, M., Ajo-Franklin, J.B., Eds.; Wiley: Hoboken, NJ, USA, 2021; pp. 33–44. ISBN 978-1-119-52179-2. [Google Scholar]
- Kristeková, M.; Kristek, J.; Moczo, P. Time-Frequency Misfit and Goodness-of-Fit Criteria for Quantitative Comparison of Time Signals. Geophys. J. Int. 2009, 178, 813–825. [Google Scholar] [CrossRef]
- Kristekova, M.; Kristek, J.; Moczo, P.; Day, S.M. Misfit Criteria for Quantitative Comparison of Seismograms. Bull. Seismol. Soc. Am. 2006, 96, 1836–1850. [Google Scholar] [CrossRef]
- Soh, J.; Copeland, M.; Puca, A.; Harris, M. Overview of Azure Infrastructure as a Service (IaaS) Services. In Microsoft Azure: Planning, Deploying, and Managing the Cloud; Soh, J., Copeland, M., Puca, A., Harris, M., Eds.; Apress: Berkeley, CA, USA, 2020; pp. 21–41. ISBN 978-1-4842-5958-0. [Google Scholar]
- Soh, J.; Copeland, M.; Puca, A.; Harris, M. Overview of Azure Platform as a Service. In Microsoft Azure: Planning, Deploying, and Managing the Cloud; Soh, J., Copeland, M., Puca, A., Harris, M., Eds.; Apress: Berkeley, CA, USA, 2020; pp. 43–55. ISBN 978-1-4842-5958-0. [Google Scholar]

| Event | Number of DAS SP | DAS Spatial Sampling | Easting [km GK4] | Northing [km GK4] | Depth [m msl] | t0 (UTC) | RMS [s] | Len [m] |
|---|---|---|---|---|---|---|---|---|
| 9 February | 55 | 10 m | 4473.33 | 5325.51 | 3570 | 2022.02.09T05:51:29.100 | 0.041 | 382 |
| 11 | 50 m | 4473.39 | 5325.31 | 3320 | 2022.02.09T05:51:29.088 | 0.086 | 546 | |
| 0 | - | 4473.65 | 5323.06 | 3287 | 2022.02.09T05:51:29.161 | 0.078 | 288 | |
| 22 April | 55 | 10 m | 4466.19 | 5330.36 | 1260 | 2022.04.22T13:26:11.664 | 0.016 | 222 |
| 6 | 100 m | 4466.14 | 5330.42 | 1177 | 2022.04.22T13:26:11.682 | 0.038 | 277 | |
| 1 | - | 4466.20 | 5330.66 | 1043 | 2022.04.22T13:26:11.772 | 0.068 | 649 |
| Event | <f0> (Hz) | <Ω0> (m.s−2.Hz−1) | <M0> (N.m) | <MW> | <∆S> (Pa) | M0, ref (N.m) | MW, ref | ∆Sref (Pa) |
|---|---|---|---|---|---|---|---|---|
| 9 February | 20 | 3.7 × 10−9 | 5.8 × 1011 | 1.7 | 1.2 × 107 | 5.4 × 1011 | 1.7 | 1.1 × 107 |
| 22 April | 25 | 1.9 × 10−9 | 1.1 × 109 | −0.1 | 3.4 × 104 | 1.1 × 109 | −0.1 | 4.2 × 104 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azzola, J.; Gaucher, E. Seismic Monitoring of a Deep Geothermal Field in Munich (Germany) Using Borehole Distributed Acoustic Sensing. Sensors 2024, 24, 3061. https://doi.org/10.3390/s24103061
Azzola J, Gaucher E. Seismic Monitoring of a Deep Geothermal Field in Munich (Germany) Using Borehole Distributed Acoustic Sensing. Sensors. 2024; 24(10):3061. https://doi.org/10.3390/s24103061
Chicago/Turabian StyleAzzola, Jérôme, and Emmanuel Gaucher. 2024. "Seismic Monitoring of a Deep Geothermal Field in Munich (Germany) Using Borehole Distributed Acoustic Sensing" Sensors 24, no. 10: 3061. https://doi.org/10.3390/s24103061
APA StyleAzzola, J., & Gaucher, E. (2024). Seismic Monitoring of a Deep Geothermal Field in Munich (Germany) Using Borehole Distributed Acoustic Sensing. Sensors, 24(10), 3061. https://doi.org/10.3390/s24103061