

Application of Air-Coupled Ground Penetrating Radar Based on F-K Filtering and BP Migration in High-Speed Railway Tunnel Detection

 ,
,
Abstract
1. Introduction
2. Forward Modeling and Algorithm Improvement of Air-Coupled GRP Tunnel Detection
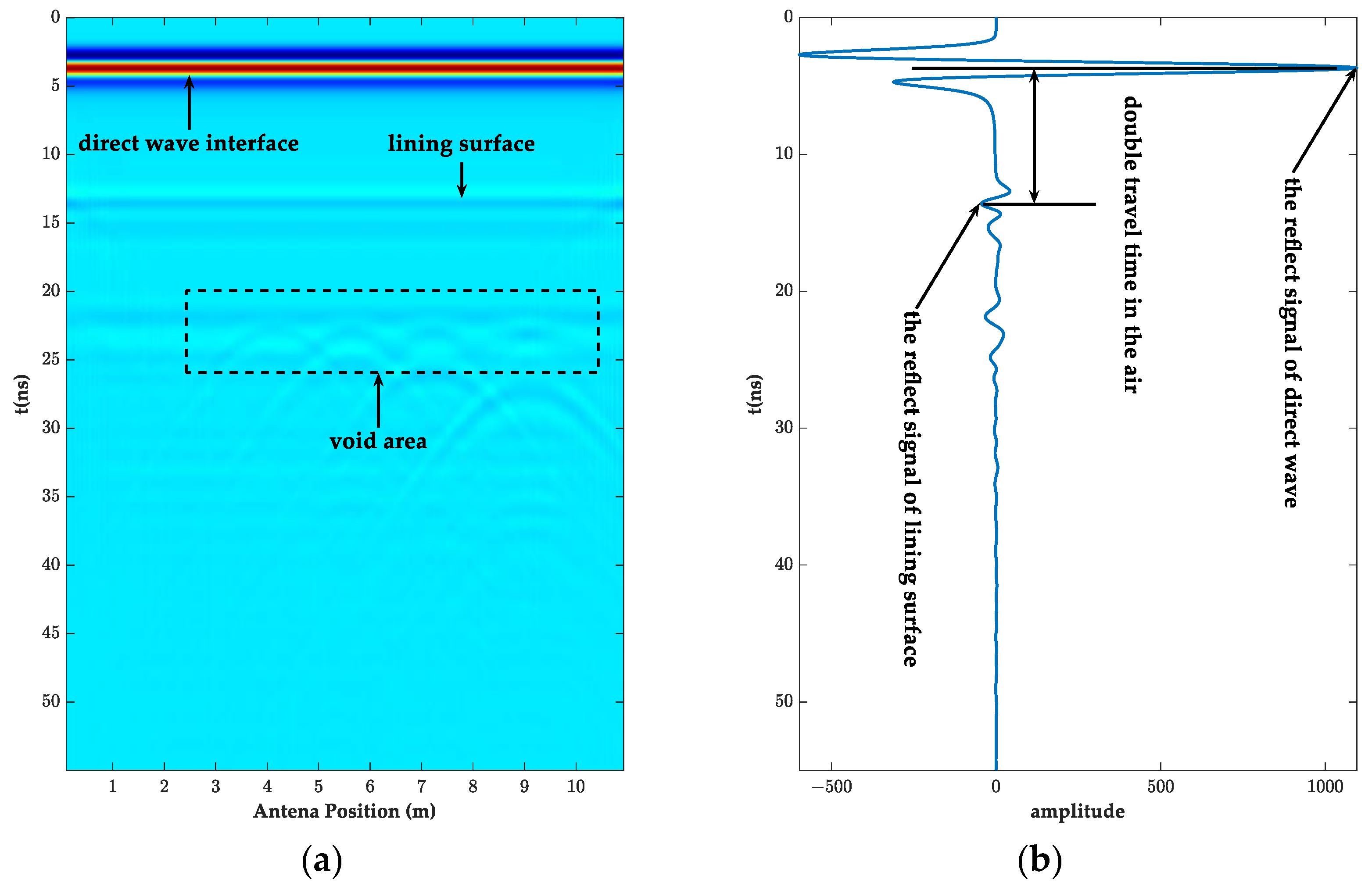
2.1. Forward Modeling of the Different Detection Distances
2.2. The Forward Modeling of the High-Speed Railway Tunnel Interference Model and the Improvement of Its Image Interpretation Algorithm
2.2.1. Forward Simulation of a High-Speed Rail Tunnel Interference Model and the Improvement of Its Image Interpretation Algorithms
2.2.2. The Forward Modeling of F-K Filtering Based on the Butterfly Filter and Its BP Migration
3. Analysis and Verification of Measured Data
3.1. Comparison of the Test Results
3.2. Verification of Drill Core Sampling
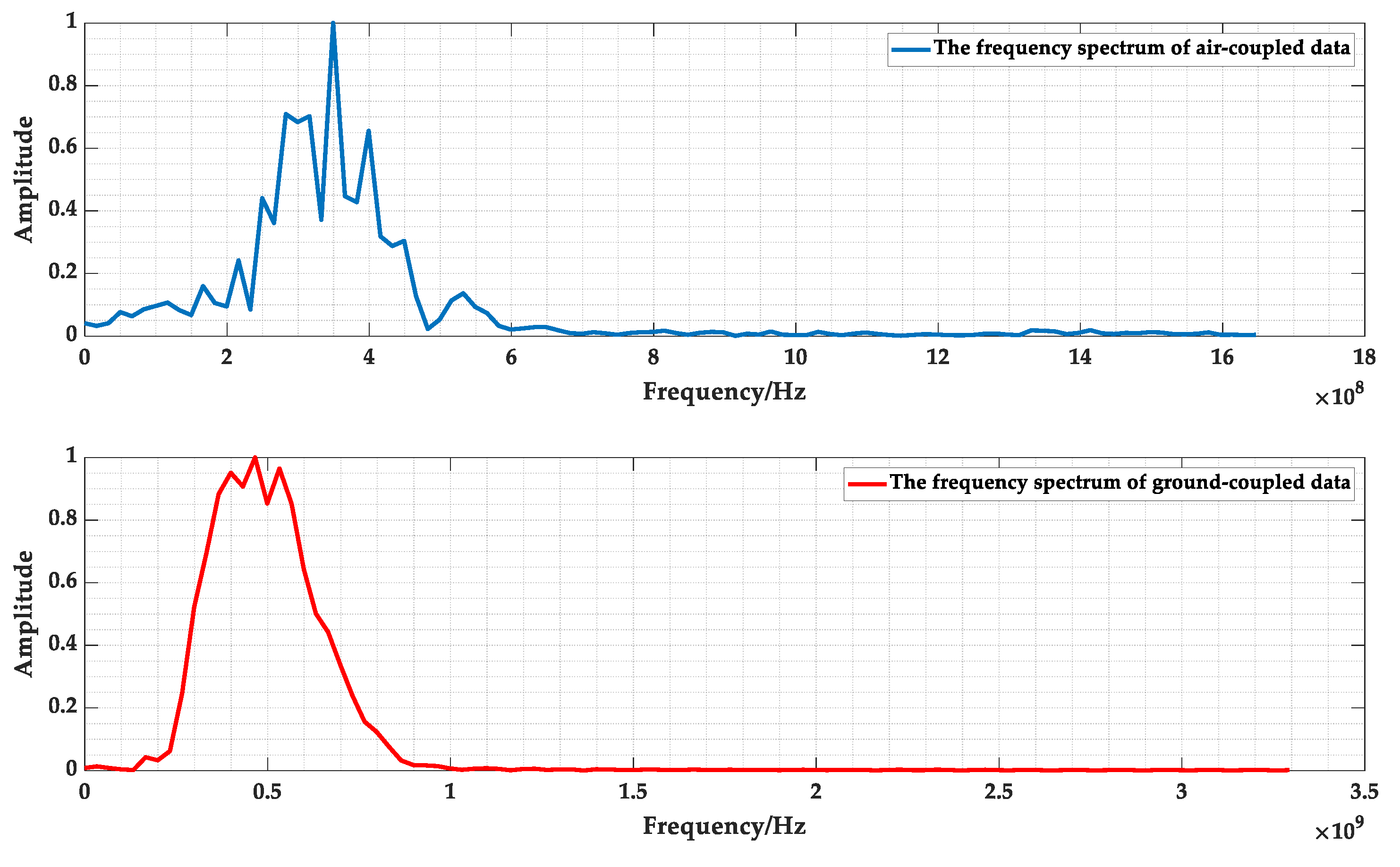
4. Comparative Analysis of the Air-Coupled and Ground-Coupled GPR Tunnel Measurements
5. Conclusions
- (1)
- The forward simulation and real measurements of the air-coupled GPR tunnel inspection proved that air-coupled GPR with a center frequency of 300 MHz can detect the lining layer location and defects above 0.3 m, which can meet the demand of a high-speed railway tunnel lining quality inspection.
- (2)
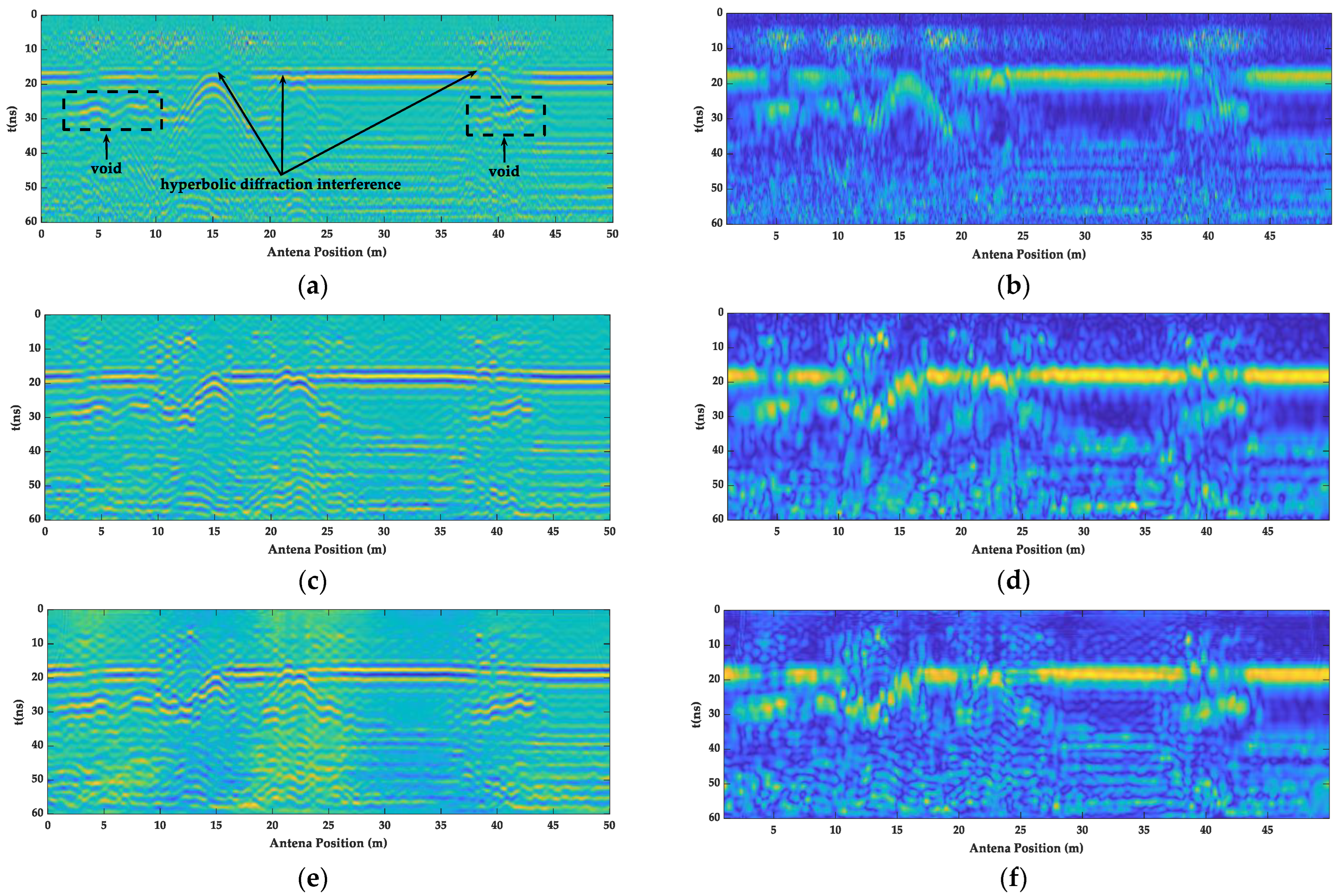
- In this paper, GPR forward simulations were carried out based on the characteristics of high-speed rail tunnels and the existence of interference sources, and a butterfly filter-based F-K filtering algorithm and BP migration algorithm were proposed. Using a multi-dimensional quantitative comparison with the mean and bandpass filtering algorithms, it was concluded that the improved algorithm can significantly suppress clutter, and thus highlight the deep lining signals.
- (3)
- A comparison of the air-coupled GPR and ground-coupled GPR images and their spectrum concluded that both air-coupled GPR and ground-coupled GPR can be used for high-speed rail tunnel lining quality inspections, but ground-coupled GPR is more accurate. The advantages of these two methods complement each other, and, combined with image recognition techniques, they can provide a rapid, accurate, and comprehensive health census of high-speed railway tunnel linings.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tian, S.M.; Wang, W.; Yang, C.Y.; Liu, C.; Wang, M.N.; Wang, K.J.; Ma, Z.F.; Lv, G. Development and prospect of railway tunnels in China in recent 40 Years. Tunn. Constr. 2021, 41, 1903–1930. [Google Scholar]
- Wang, S.L.; Gao, Y.; Qi, F.L.; Ke, Z.T.; Li, H.Y.; Lei, Y.; Peng, Z. Review on inspection technology of railway operation tunnels. J. Traffic Transp. Eng. 2020, 20, 41–57. [Google Scholar]
- Fei, Y.; Guangyu, C. Time-Frequency Analysis of Impact Echo Signals of Grouting Defects in Tunnels. Russ. J. Nondestruct. Test. 2019, 55, 581–595. [Google Scholar] [CrossRef]
- Qin, H.; Zhang, D.; Tang, Y.; Wang, Y. Automatic recognition of tunnel lining elements from GPR images using deep convolutional networks with data augmentation. Autom. Constr. 2021, 130, 103830. [Google Scholar] [CrossRef]
- Lai, W.W.-L.; Dérobert, X.; Annan, P. A review of Ground Penetrating Radar application in civil engineering: A 30-year journey from Locating and Testing to Imaging and Diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar] [CrossRef]
- Cao, R.; Ma, M.; Liang, R.; Niu, C. Detecting the Void behind the Tunnel Lining by Impact-Echo Methods with Different Signal Analysis Approaches. Appl. Sci. 2019, 9, 3280. [Google Scholar] [CrossRef]
- Gao, Y.; Jiang, Y.; Li, B. Estimation of effect of voids on frequency response of mountain tunnel lining based on microtremor method. Tunn. Undergr. Space Technol. 2014, 42, 184–194. [Google Scholar] [CrossRef]
- Konishi, S.; Kawakami, K.; Taguchi, M. Inspection Method with Infrared Thermometry for Detect Void in Subway Tunnel Lining. Procedia Eng. 2016, 165, 474–483. [Google Scholar] [CrossRef]
- White, J.B.; Wieghaus, K.T.; Karthik, M.M.; Shokouhi, P.; Hurlebaus, S.; Wimsatt, A. Nondestructive Testing Methods for Underwater Tunnel Linings: Practical Application at Chesapeake Channel Tunnel. J. Infrastruct. Syst. 2017, 23, B4016011. [Google Scholar] [CrossRef]
- White, J.; Hurlebaus, S.; Shokouhi, P.; Wimsatt, A. Use of ultrasonic tomography to detect structural impairment in tunnel linings: Validation study and field evaluation. Transp. Res. Rec. 2014, 2407, 20–31. [Google Scholar] [CrossRef]
- Zhai, J.; Wang, Q.; Wang, H.; Xie, X.; Zhou, M.; Yuan, D.; Zhang, W. Highway Tunnel Defect Detection Based on Mobile GPR Scanning. Appl. Sci. 2022, 12, 3148. [Google Scholar] [CrossRef]
- Lei, Y.; Tian, T. The vibration characteristic and impact analysis of the tunnel lining detection device based on arc rotating multi-section mechanism. Adv. Mech. Eng. 2020, 12, 1–18. [Google Scholar] [CrossRef]
- Yu, T.; Zhu, A.; Chen, Y. Efficient Crack Detection Method for Tunnel Lining Surface Cracks Based on Infrared Images. J. Comput. Civ. Eng. 2017, 31, 04016067. [Google Scholar] [CrossRef]
- Yasuda, T.; Yamamoto, H.; Enomoto, M.; Nitta, Y. Smart Tunnel Inspection and Assessment using Mobile Inspection Vehicle, Non-Contact Radar and AI. ISARC. In Proceedings of the International Symposium on Automation and Robotics in Construction, Kitakyushu, Japan, 27–28 October 2020; IAARC Publications: Waterloo, ON, Canada, 2020; Volume 37. [Google Scholar]
- Wimsatt, A.; Scullion, T.; Hurlebaus, S.; Zollinger, D.G.; Wieghaus, K.T.; Shokouhi, P.; Wiggenhauser, H.; Saarenketo, T.; Tonon, F.; Nazarian, S.; et al. High-speed nondestructive testing methods for mapping voids, debonding, delaminations, moisture and other defects behind or within tunnel linings. Struct. Mater. Technol. 2010, 2010. [Google Scholar]
- National Academies of Sciences, Engineering, and Medicine. Mapping Voids, Debonding, Delaminations, Moisture, and Other Defects Behind or Within Tunnel Linings; National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2014. [Google Scholar]
- Marecos, V.; Fontul, S.; Solla, M.; de Lurdes Antunes, M. Evaluation of the feasibility of Common Mid-Point approach for air-coupled GPR applied to road pavement assessment. Measurement 2018, 128, 295–305. [Google Scholar] [CrossRef]
- Zan, Y.; Su, G.; Wei, W.; Lei, W.; Zhang, Y.; Li, B.; Zhang, C.; Hu, Q. Detection technology of the vehicle-mounted GPR and its application in high-speed railway tunnels. Mod. Tunn. Technol. 2018, 55, 1288–1294. [Google Scholar]
- Inspection, Operating Railway Tunnel. A Train-Mounted GPR System for Operating Railway Tunnel Inspection. In Proceedings of the ISMR 2020: 7th International Symposium on Innovation & Sustainability of Modern Railway, Nanchang, China, 23–25 October 2020; IOS Press: Amsterdam, The Netherlands, 2021; Volume 14. [Google Scholar]
- Jin, X.; Ali, M. Simple empirical formulas to estimate the dielectric constant and conductivity of concrete. Microw. Opt. Technol. Lett. 2018, 61, 386–390. [Google Scholar] [CrossRef]
- Jol, H.M. (Ed.) Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Ao, Y.; Xu, J.; Wu, S.; Lv, J.; Chen, W. An intelligent identification method to detect tunnel defects based on the multidimensional analysis of GPR reflections. Chin. J. Eng. 2018, 40, 293–301. [Google Scholar]
- Zhang, M. Algorithm and Implementation of Synthetic Aperture Imaging for GPR; Harbin Institute of Technology: Harbin, China, 2016. [Google Scholar]
- Özdemir, C.; Demirci, Ş.; Yiğit, E.; Yilmaz, B. A Review on Migration Methods in B-Scan Ground Penetrating Radar Imaging. Math. Probl. Eng. 2014, 2014, 1–16. [Google Scholar] [CrossRef]
- TB 10223-2004; Regulations for Non-Destructive Testing of Railway Tunnel Lining Quality. China Railway Publishing House: Beijing, China, 2010.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value |
|---|---|
| Antenna-to-lining distance (m) | h = 0.5/1.0/1.5/2.0/2.5/3.0/3.5/4.0 |
| Relative dielectric constant | εr1 = 7 (concrete), εr2 = 10 (rock wall) |
| Conductivity (S/m) | 0.001 |
| Relative permeability | 1 |
| Antenna center frequency (MHz) | 300 |
| Time window (ns) | 55 |
| Scan interval (m) | 0.015 |
| Filtering Method | Hs | D |
|---|---|---|
| Mean and bandpass filtering | 4.3 | 2.4 |
| F-K filtering | 4.5 | 5.2 |
| BP migration | 4.8 | 6.6 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Antenna center frequency | 300 MHz | Detection distance | 0~4.0 m |
| Channel | 6 | Detection depth | 0–2.5 m |
| Time window | 60 ns | Working temperature | −30 °C~+70 °C |
| Maximum scan rate | 976 scans/s | Sampling points | 512/1024 |
| Detection speed | 10~120 km/h | Scan interval | 0.02 m |
| Filtering Method | Hs | D |
|---|---|---|
| Mean and bandpass filtering | 4.1 | 1.5 |
| F-K filtering | 4.2 | 2.0 |
| BP migration | 4.4 | 3.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, Y.; Jiang, B.; Su, G.; Zou, Y.; Qi, F.; Li, B.; Jia, F.; Tian, T.; Qu, Q. Application of Air-Coupled Ground Penetrating Radar Based on F-K Filtering and BP Migration in High-Speed Railway Tunnel Detection. Sensors 2023, 23, 4343. https://doi.org/10.3390/s23094343
Lei Y, Jiang B, Su G, Zou Y, Qi F, Li B, Jia F, Tian T, Qu Q. Application of Air-Coupled Ground Penetrating Radar Based on F-K Filtering and BP Migration in High-Speed Railway Tunnel Detection. Sensors. 2023; 23(9):4343. https://doi.org/10.3390/s23094343
Chicago/Turabian StyleLei, Yang, Bo Jiang, Guofeng Su, Yong Zou, Falin Qi, Baoqing Li, Feiyu Jia, Tian Tian, and Qiming Qu. 2023. "Application of Air-Coupled Ground Penetrating Radar Based on F-K Filtering and BP Migration in High-Speed Railway Tunnel Detection" Sensors 23, no. 9: 4343. https://doi.org/10.3390/s23094343
APA StyleLei, Y., Jiang, B., Su, G., Zou, Y., Qi, F., Li, B., Jia, F., Tian, T., & Qu, Q. (2023). Application of Air-Coupled Ground Penetrating Radar Based on F-K Filtering and BP Migration in High-Speed Railway Tunnel Detection. Sensors, 23(9), 4343. https://doi.org/10.3390/s23094343