
Enhancing Free-Living Fall Risk Assessment: Contextualizing Mobility Based IMU Data

 ,
,  , ,
, , 
Abstract
1. Introduction
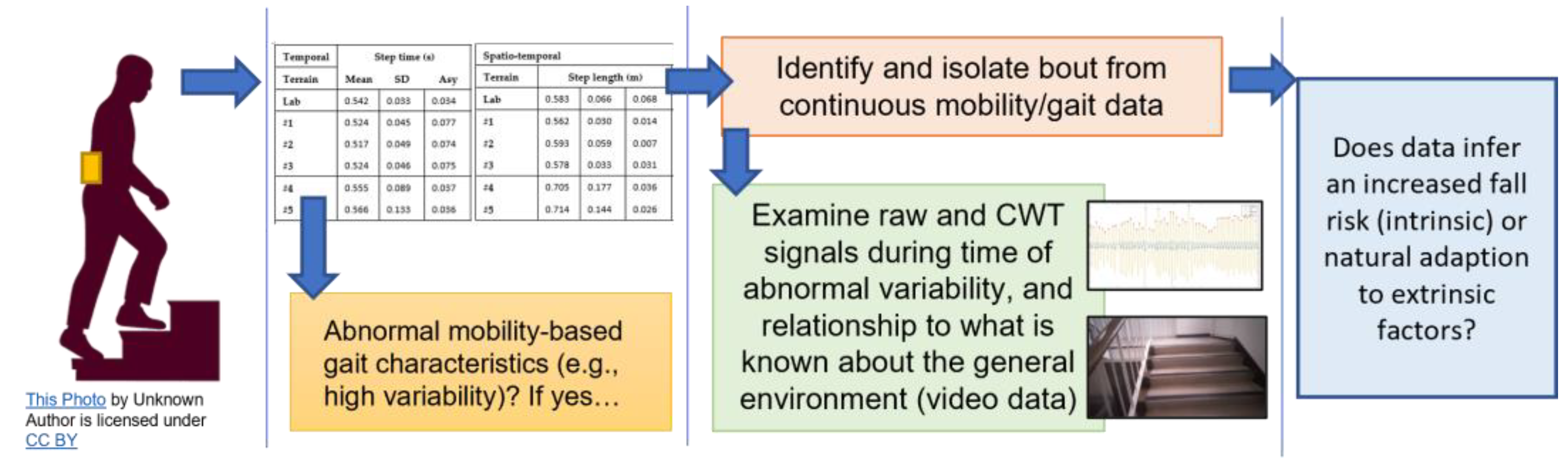
- Uses a contemporary and pragmatic video-based wearable to describe how context can better inform data from a lower back mounted IMU in fall risk assessment,
- Presents a suggested AI-based approach to automatically contextualise video data.
2. Materials and Methods
2.1. Participant
2.2. Protocol
2.3. Wearable Camera
2.4. Wearable IMU
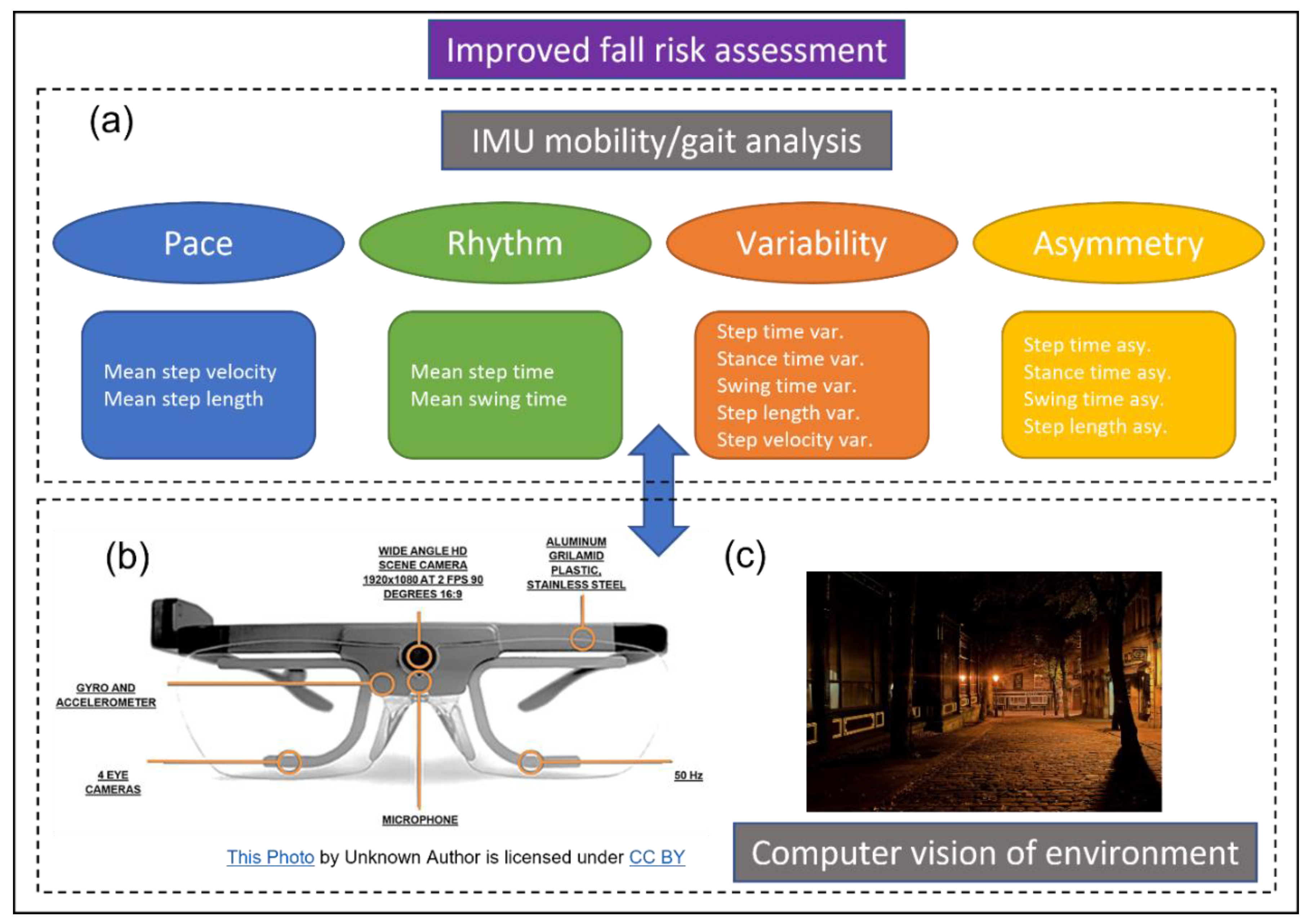
2.5. IMU Algorithms and Mobility-Based Gait Characteristics
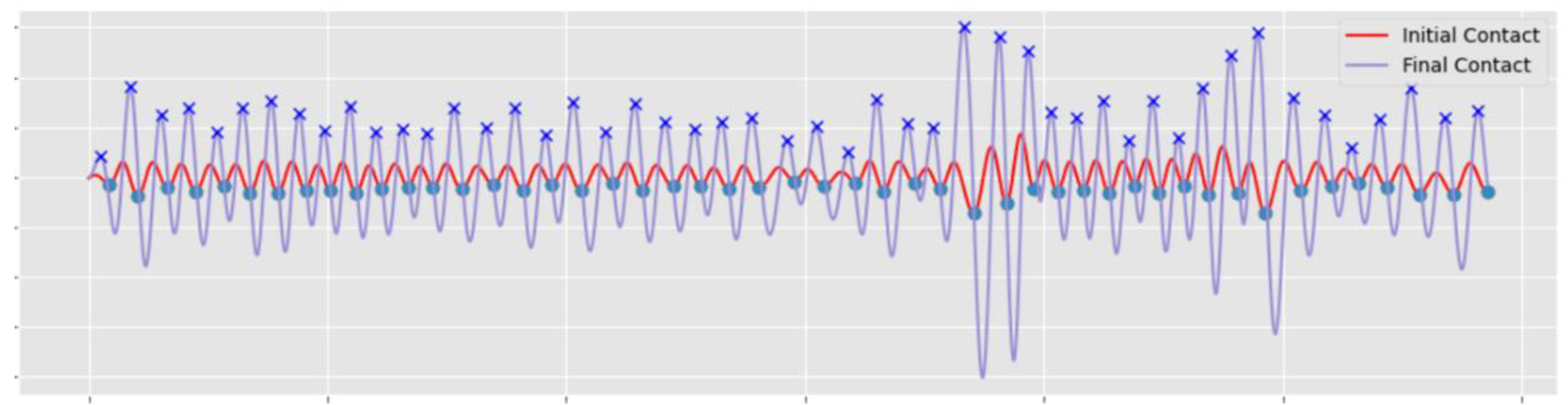
- A continuous wavelet transform (CWT) estimated IC and FC time events from av. First, av was integrated and then differentiated using a Gaussian CWT, ICs were identified as the times of the minima. The differentiated signal underwent a further CWT differentiation from which FC’s were identified as the times of the maxima, Figure 2. From the sequence of IC/FC events produced within a gait cycle temporal characteristics (e.g., step time) were generated.
- IC and FC values were used to calculate an array of times for: (i) step (time from ICRight to ICLeft to ICRight, etc.), (ii) stance (time between ICLeft and FCLeft, then ICRight and FCRight, etc.) and swing (time between FCLeft and ICLeft then FCRight and ICRight, etc.), [24].
- The spatial characteristic of step length was estimated from the up/down movement of participants centre of mass (CoM), close to L5. Movement in the vertical direction follows a circular trajectory and the changes in CoM height can be calculated (double integration of av) to produce step length from the inverted pendulum model [23]. A combination of step time and step length produce step velocity [24].
2.6. Analysis
3. Results and Discussion
3.1. IMU Mobility-Based Gait Data: Current Limitations and Future Considerations
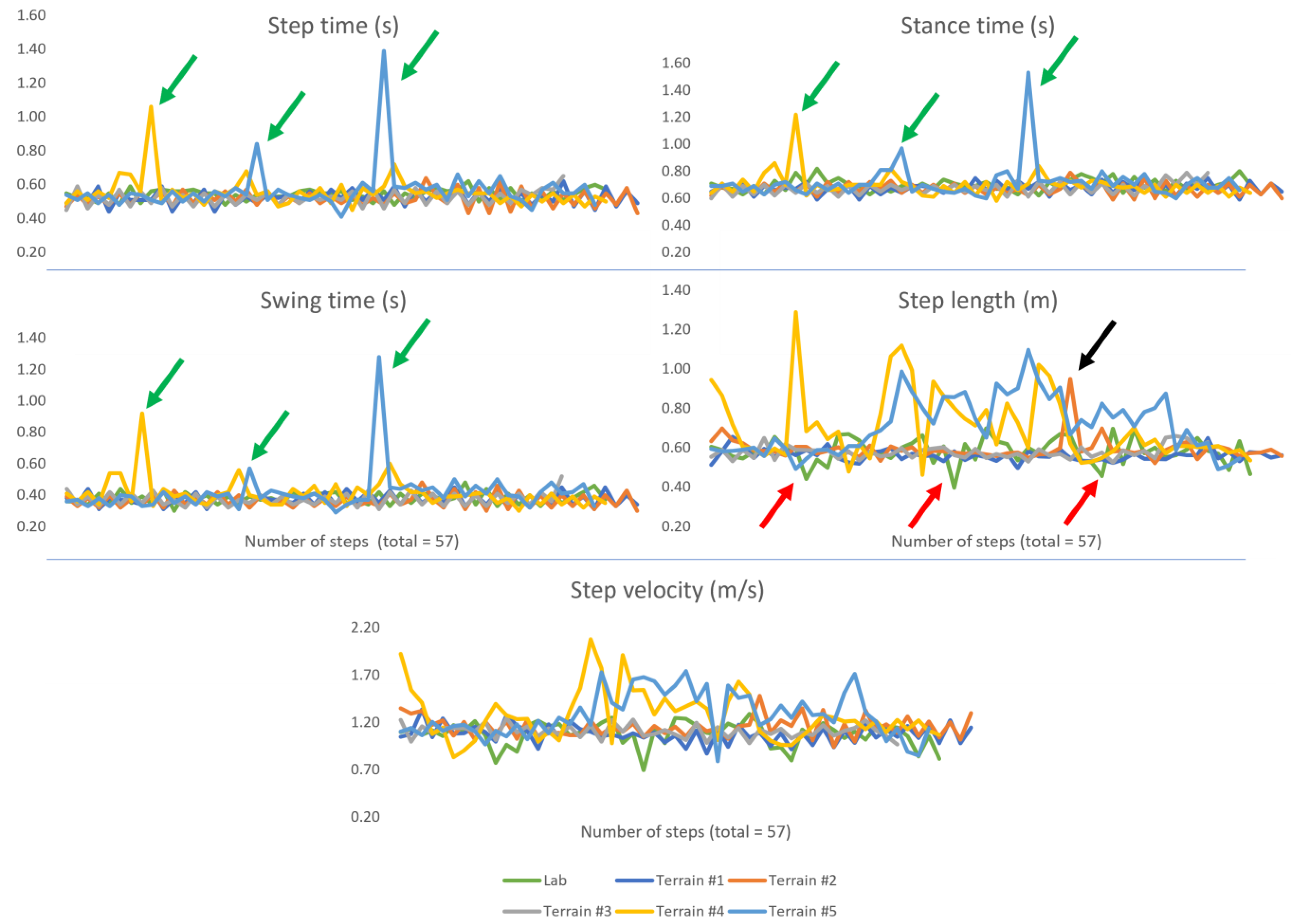
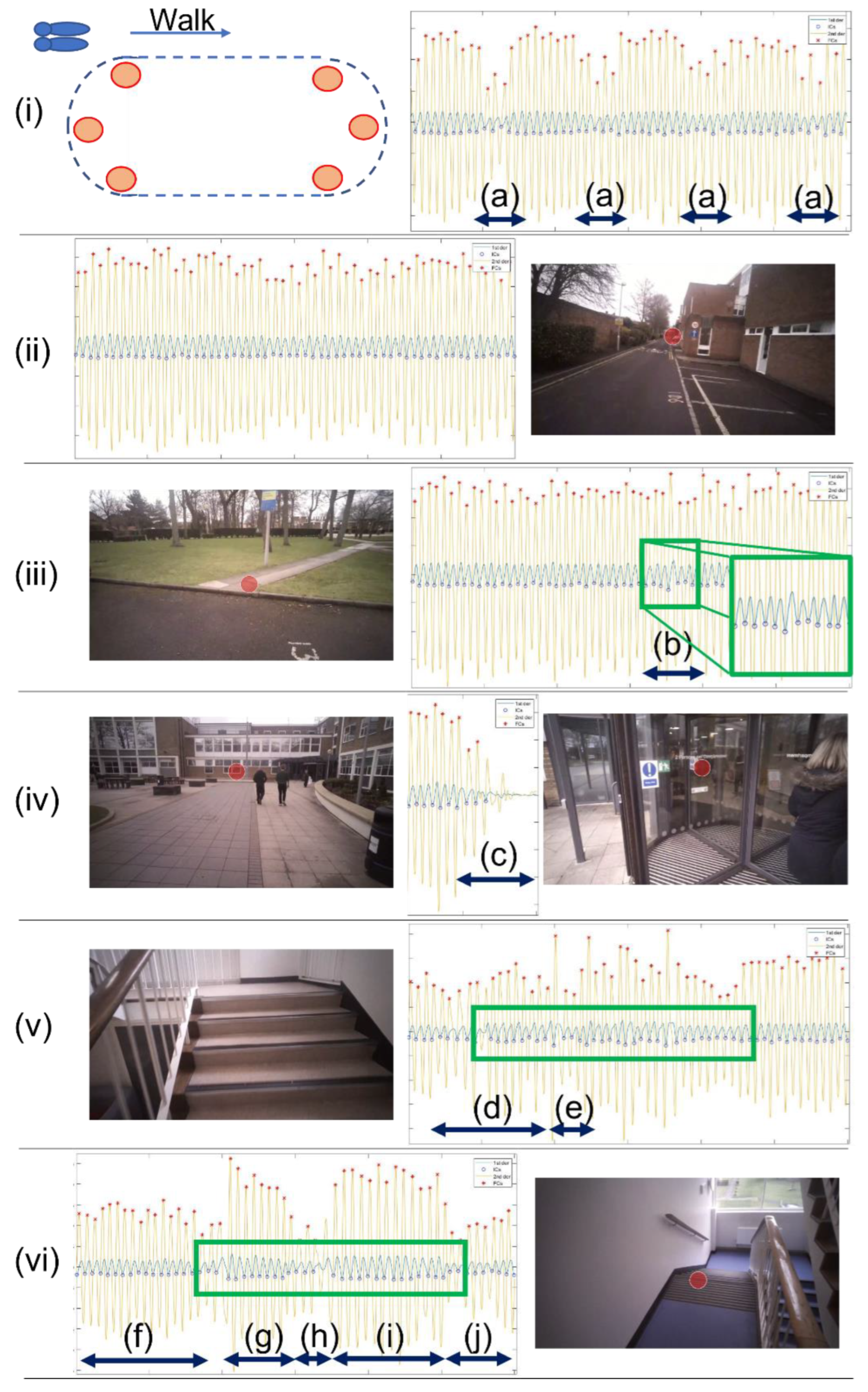
- The lab protocol consisted of a 2-min walk in a loop which, although it is a scripted task, is useful to examine. Step length characteristics show reduced measurements (Figure 3, red arrows) at periodical moments, which are explained by the reduced stepping distance as the participant rounded the ends of the curved path of the circuit (Figure 4i). Though the step length (inverted pendulum) algorithm is designed for straight level walking, it is sensitive enough to detect shorter step lengths during obtuse angled curved walking i.e., gradual turns compared to acute turns. Accordingly, the added context (video) is useful for understanding the reduced stepping length, which could help provide a better understanding of natural intrinsic considerations to extrinsic factors, such as purposefully adjusting direction of travel to round obstacles or other pedestrians. This is a simple example within the lab but the usefulness of examining step length is also evidenced beyond controlled conditions.
- In Figure 3, step length is the one obvious anomaly from terrain #2 (black arrow), asphalt to paving (Figure 4iii). Interestingly, the increased step length (anomaly) occurred at the approximate time it was observed (from corresponding video), when the participant performed a step and transitioned from asphalt onto paving. This matches the corresponding CWT derived IMU-based signals of Figure 4iii, where there is a very subtle change in the 1st derivation of av (Figure 4iii-b). Generally, it could be that occasional anomalies in step length data equate to routine adjustments in the daily mobility of a participant undertaking a single step transitioning from one terrain to another. Equally, it could be a natural avoidance of an obstacle on the ground (i.e., stepping over or beyond) due to natural intrinsic/instinctive reactions. Accordingly, it may be important to examine those step length anomalies arising from IMUs in accordance with video data to better understand the natural abilities of the participant to adjust and manage naturally occurring obstacles/hazards. The approach may help future areas of research aiming to refine IMU-based mobility-based gait data from continuous monitoring (e.g., 7-days) for targeted areas of investigation in fall risk assessment.
3.2. Other Observations
3.3. A Conceptual Model with Context
3.4. Further Context and Next Steps
3.5. Computer Vision-Based Algorithm
3.6. Video-Based Challenges
3.7. Ethical AI
3.8. Enhanced Fall Risk Assessment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Allen, N.E.; Schwarzel, A.K.; Canning, C.G. Recurrent falls in Parkinson’s disease: A systematic review. Park. Dis. 2013, 2013, 906274. [Google Scholar] [CrossRef] [PubMed]
- Pelicioni, P.H.; Menant, J.C.; Latt, M.D.; Lord, S.R. Falls in Parkinson’s disease subtypes: Risk factors, locations and circumstances. Int. J. Environ. Res. Public Health 2019, 16, 2216. [Google Scholar] [CrossRef] [PubMed]
- Goto, Y.; Otaka, Y.; Suzuki, K.; Inoue, S.; Kondo, K.; Shimizu, E. Incidence and circumstances of falls among community-dwelling ambulatory stroke survivors: A prospective study. Geriatr. Gerontol. Int. 2019, 19, 240–244. [Google Scholar] [CrossRef] [PubMed]
- Sejdić, E.; Godfrey, A.; McIlroy, W.; Montero-Odasso, M. Engineering human gait and the potential role of wearable sensors to monitor falls. In Falls and Cognition in Older Persons; Springer: Berlin/Heidelberg, Germany, 2020; pp. 401–426. [Google Scholar]
- Danielsen, A.; Olofsen, H.; Bremdal, B.A. Increasing fall risk awareness using wearables: A fall risk awareness protocol. J. Biomed. Inform. 2016, 63, 184–194. [Google Scholar] [CrossRef] [PubMed]
- Godfrey, A.; Conway, R.; Meagher, D.; ÓLaighin, G. Direct measurement of human movement by accelerometry. Med. Eng. Phys. 2008, 30, 1364–1386. [Google Scholar]
- Del Din, S.; Godfrey, A.; Mazzà, C.; Lord, S.; Rochester, L. Free-living monitoring of Parkinson’s disease: Lessons from the field. Mov. Disord. 2016, 31, 1293–1313. [Google Scholar] [CrossRef]
- Godfrey, A. Wearables for independent living in older adults: Gait and falls. Maturitas 2017, 100, 16–26. [Google Scholar] [CrossRef]
- Lord, S.; Galna, B.; Rochester, L. Moving forward on gait measurement: Toward a more refined approach. Mov. Disord. 2013, 28, 1534–1543. [Google Scholar] [CrossRef]
- Mactier, K.; Lord, S.; Godfrey, A.; Burn, D.; Rochester, L. The relationship between real world ambulatory activity and falls in incident Parkinson’s disease: Influence of classification scheme. Park. Relat. Disord. 2015, 21, 236–242. [Google Scholar] [CrossRef]
- Nouredanesh, M.; Godfrey, A.; Howcroft, J.; Lemaire, E.D.; Tung, J. Fall risk assessment in the wild: A critical examination of wearable sensor use in free-living conditions. Gait Posture 2021, 85, 178–190. [Google Scholar] [CrossRef]
- Nouredanesh, M.; Ojeda, L.; Alexander, N.B.; Godfrey, A.; Schwenk, M.; Melek, W.; Tung, J. Automated Detection of Older Adults’ Naturally-Occurring Compensatory Balance Reactions: Translation From Laboratory to Free-Living Conditions. IEEE J. Transl. Eng. Health Med. 2022, 10, 1–13. [Google Scholar] [CrossRef]
- Woolrych, R.; Zecevic, A.; Sixsmith, A.; Sims-Gould, J.; Feldman, F.; Chaudhury, H.; Symes, B.; Robinovitch, S.N. Using video capture to investigate the causes of falls in long-term care. Gerontologist 2015, 55, 483–494. [Google Scholar] [CrossRef] [PubMed]
- Bianco, S.; Ciocca, G.; Napoletano, P.; Schettini, R. An interactive tool for manual, semi-automatic and automatic video annotation. Comput. Vis. Image Underst. 2015, 131, 88–99. [Google Scholar] [CrossRef]
- Patel, J.; Lai, P.; Dormer, D.; Gullapelli, R.; Wu, H.; Jones, J.J. Comparison of Ease of Use and Comfort in Fitness Trackers for Participants Impaired by Parkinson’s Disease: An exploratory study. AMIA Summits Transl. Sci. Proc. 2021, 2021, 505. [Google Scholar]
- Li, C.; Lee, C.-F.; Xu, S. Stigma Threat in Design for Older Adults: Exploring Design Factors that Induce Stigma Perception. Int. J. Des. 2020, 14, 51–64. [Google Scholar]
- Celik, Y.; Stuart, S.; Woo, W.L.; Godfrey, A. Wearable Inertial Gait Algorithms: Impact of Wear Location and Environment in Healthy and Parkinson’s Populations. Sensors 2021, 21, 6476. [Google Scholar] [CrossRef] [PubMed]
- Vijayan, V.; Connolly, J.P.; Condell, J.; McKelvey, N.; Gardiner, P. Review of wearable devices and data collection considerations for connected health. Sensors 2021, 21, 5589. [Google Scholar] [CrossRef]
- Celik, Y.; Stuart, S.; Woo, W.L.; Godfrey, A. Gait analysis in neurological populations: Progression in the use of wearables. Med. Eng. Phys. 2021, 87, 9–29. [Google Scholar] [CrossRef]
- Morris, R.; Hickey, A.; Del Din, S.; Godfrey, A.; Lord, S.; Rochester, L. A model of free-living gait: A factor analysis in Parkinson’s disease. Gait Posture 2017, 52, 68–71. [Google Scholar] [CrossRef] [PubMed]
- Hickey, A.; Del Din, S.; Rochester, L.; Godfrey, A. Detecting free-living steps and walking bouts: Validating an algorithm for macro gait analysis. Physiol. Meas. 2016, 38, N1. [Google Scholar] [CrossRef] [PubMed]
- McCamley, J.; Donati, M.; Grimpampi, E.; Mazzà, C. An enhanced estimate of initial contact and final contact instants of time using lower trunk inertial sensor data. Gait Posture 2012, 36, 316–318. [Google Scholar] [CrossRef] [PubMed]
- Zijlstra, W.; Hof, A.L. Assessment of spatio-temporal gait parameters from trunk accelerations during human walking. Gait Posture 2003, 18, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Godfrey, A.; Del Din, S.; Barry, G.; Mathers, J.; Rochester, L. Instrumenting gait with an accelerometer: A system and algorithm examination. Med. Eng. Phys. 2015, 37, 400–407. [Google Scholar] [CrossRef] [PubMed]
- Kirkwood, R.N.; Culham, E.G.; Costigan, P. Hip moments during level walking, stair climbing, and exercise in individuals aged 55 years or older. Phys. Ther. 1999, 79, 360–370. [Google Scholar] [CrossRef]
- Hausdorff, J.M.; Rios, D.A.; Edelberg, H.K. Gait variability and fall risk in community-living older adults: A 1-year prospective study. Arch. Phys. Med. Rehabil. 2001, 82, 1050–1056. [Google Scholar] [CrossRef] [PubMed]
- Moon, Y.; Wajda, D.A.; Motl, R.W.; Sosnoff, J.J. Stride-time variability and fall risk in persons with multiple sclerosis. Mult. Scler. Int. 2015, 2015, 964790. [Google Scholar] [CrossRef] [PubMed]
- Marchal, V.; Sellers, J.; Pélégrini-Issac, M.; Galléa, C.; Bertasi, E.; Valabrègue, R.; Lau, B.; Leboucher, P.; Bardinet, E.; Welter, M.-L. Deep brain activation patterns involved in virtual gait without and with a doorway: An fMRI study. PLoS ONE 2019, 14, e0223494. [Google Scholar] [CrossRef]
- Cowie, D.; Limousin, P.; Peters, A.; Day, B.L. Insights into the neural control of locomotion from walking through doorways in Parkinson’s disease. Neuropsychologia 2010, 48, 2750–2757. [Google Scholar] [CrossRef]
- Morris, R.; Lord, S.; Bunce, J.; Burn, D.; Rochester, L. Gait and cognition: Mapping the global and discrete relationships in ageing and neurodegenerative disease. Neurosci. Biobehav. Rev. 2016, 64, 326–345. [Google Scholar] [CrossRef] [PubMed]
- Veldema, J.; Gharabaghi, A. Non-invasive brain stimulation for improving gait, balance, and lower limbs motor function in stroke. J. NeuroEng. Rehabil. 2022, 19, 84. [Google Scholar] [CrossRef]
- Gonzalez-Hoelling, S.; Bertran-Noguer, C.; Reig-Garcia, G.; Suñer-Soler, R. Effects of a music-based rhythmic auditory stimulation on gait and balance in subacute stroke. Int. J. Environ. Res. Public Health 2021, 18, 2032. [Google Scholar] [CrossRef] [PubMed]
- Lim, J.; Amado, A.; Sheehan, L.; Van Emmerik, R.E. Dual task interference during walking: The effects of texting on situational awareness and gait stability. Gait Posture 2015, 42, 466–471. [Google Scholar] [CrossRef] [PubMed]
- Kressig, R.W.; Herrmann, F.R.; Grandjean, R.; Michel, J.-P.; Beauchet, O. Gait variability while dual-tasking: Fall predictor in older inpatients? Aging Clin. Exp. Res. 2008, 20, 123–130. [Google Scholar] [CrossRef] [PubMed]
- Plummer-D’Amato, P.; Altmann, L.J.; Saracino, D.; Fox, E.; Behrman, A.L.; Marsiske, M. Interactions between cognitive tasks and gait after stroke: A dual task study. Gait Posture 2008, 27, 683–688. [Google Scholar] [CrossRef] [PubMed]
- Pavlov, V.; Khryashchev, V.; Pavlov, E.; Shmaglit, L. Application for video analysis based on machine learning and computer vision algorithms. In Proceedings of the 14th Conference of Open Innovation Association FRUCT, Helsinki, Finland, 11–15 November 2013; IEEE: New York, NY, USA, 2013; pp. 90–100. [Google Scholar]
- Nishani, E.; Çiço, B. Computer vision approaches based on deep learning and neural networks: Deep neural networks for video analysis of human pose estimation. In Proceedings of the 6th Mediterranean Conference on Embedded Computing (MECO), Bar, Montenegro, 11–15 June 2017; IEEE: New York, NY, USA, 2017; pp. 1–4. [Google Scholar]
- Nouredanesh, M.; Godfrey, A.; Powell, D.; Tung, J. Egocentric vision-based detection of surfaces: Towards context-aware free-living digital biomarkers for gait and fall risk assessment. J. NeuroEng. Rehabil. 2022, 19, 79. [Google Scholar] [CrossRef]
- Moore, J.; Stuart, S.; Walker, R.; McMeekin, P.; Young, F.; Godfrey, A. Deep learning semantic segmentation for indoor terrain extraction: Toward better informing free-living wearable gait assessment. In Proceedings of the IEEE BHI-BSN Conference 2022, Ioanina, Greece, 27–30 September 2022. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.-J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; IEEE: New York, NY, USA, 2009; pp. 248–255. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar]
- Zhuang, F.; Qi, Z.; Duan, K.; Xi, D.; Zhu, Y.; Zhu, H.; Xiong, H.; He, Q. A comprehensive survey on transfer learning. Proc. IEEE 2020, 109, 43–76. [Google Scholar] [CrossRef]
- Weiss, K.; Khoshgoftaar, T.M.; Wang, D. A survey of transfer learning. J. Big Data 2016, 3, 9. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2009, 22, 1345–1359. [Google Scholar] [CrossRef]
- Zhou, J.; Pun, C.-M.; Tong, Y. Privacy-sensitive objects pixelation for live video streaming. In Proceedings of the 28th ACM International Conference on Multimedia, Seattle, WA, USA, 12–16 October 2020; pp. 3025–3033. [Google Scholar]
- Zhou, J.; Pun, C.-M. Personal privacy protection via irrelevant faces tracking and pixelation in video live streaming. IEEE Trans. Inf. Secur. 2020, 16, 1088–1103. [Google Scholar] [CrossRef]
- Alipour, V.; Azami-Aghdash, S.; Rezapour, A.; Derakhshani, N.; Ghiasi, A.; Yusefzadeh, N.; Taghizade, S.; Amuzadeh, S. Cost-effectiveness of multifactorial interventions in preventing falls among elderly population: A systematic review. Bull. Emerg. Trauma 2021, 9, 159. [Google Scholar] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temporal | Step Time (s) | Stance Time (s) | Swing Time (s) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Terrain | Mean | SD | Asy | Mean | SD | Asy | Mean | SD | Asy |
| Lab | 0.542 | 0.033 | 0.034 | 0.701 | 0.046 | 0.053 | 0.381 | 0.038 | 0.053 |
| #1 | 0.524 | 0.045 | 0.077 | 0.674 | 0.043 | 0.071 | 0.374 | 0.042 | 0.071 |
| #2 | 0.517 | 0.049 | 0.074 | 0.670 | 0.046 | 0.071 | 0.670 | 0.044 | 0.071 |
| #3 | 0.524 | 0.046 | 0.075 | 0.675 | 0.047 | 0.075 | 0.374 | 0.044 | 0.074 |
| #4 | 0.555 | 0.089 | 0.037 | 0.699 | 0.092 | 0.042 | 0.412 | 0.096 | 0.045 |
| #5 | 0.566 | 0.133 | 0.036 | 0.718 | 0.133 | 0.037 | 0.415 | 0.136 | 0.038 |
| Spatio-temporal | |||||||||
| Terrain | Step length (m) | Step velocity (m/s) | Mean: average in a 30 s bout SD: standard deviation of times in a 30 s bout Asy: absolute difference between left and right (assumed as every other step) in a 30 s bout | ||||||
| Lab | 0.583 | 0.066 | 0.068 | 1.079 | 0.129 | 0.051 | |||
| #1 | 0.562 | 0.030 | 0.014 | 1.079 | 0.096 | 0.130 | |||
| #2 | 0.593 | 0.059 | 0.007 | 1.153 | 0.109 | 0.149 | |||
| #3 | 0.578 | 0.033 | 0.031 | 1.107 | 0.072 | 0.099 | |||
| #4 | 0.705 | 0.177 | 0.036 | 1.274 | 0.267 | 0.016 | |||
| #5 | 0.714 | 0.144 | 0.026 | 1.280 | 0.237 | 0.100 | |||
| Mobility/Gait Domain | IMU Mobility/Gait Characteristics | Lab | Outdoor and Non-Laboratory Terrains | |||||
|---|---|---|---|---|---|---|---|---|
| Single | Dual | #1 | #2 | #3 | #4 | #5 | ||
| Pace | Mean step velocity (m/s) | 1.079 | 0.967 | 1.079 | 1.153 | 1.107 | 1.274 | 1.280 |
| Mean step length (m) | 0.583 | 0.548 | 0.562 | 0.593 | 0.578 | 0.705 | 0.714 | |
| Rhythm | Mean step time (s) | 0.542 | 0.568 | 0.524 | 0.517 | 0.524 | 0.555 | 0.566 |
| Mean swing time (s) | 0.381 | 0.414 | 0.374 | 0.366 | 0.374 | 0.412 | 0.415 | |
| Variability | Step time variability (s) | 0.033 | 0.033 | 0.045 | 0.049 | 0.046 | 0.089 | 0.133 |
| Stance time variability (s) | 0.046 | 0.045 | 0.043 | 0.046 | 0.047 | 0.092 | 0.133 | |
| Swing time variability (s) | 0.038 | 0.047 | 0.042 | 0.045 | 0.044 | 0.096 | 0.136 | |
| Step length variability (s) | 0.066 | 0.080 | 0.030 | 0.059 | 0.033 | 0.177 | 0.144 | |
| Step velocity variability (s) | 0.129 | 0.147 | 0.096 | 0.109 | 0.072 | 0.267 | 0.237 | |
| Asymmetry | Step time asymmetry (s) | 0.034 | 0.027 | 0.077 | 0.074 | 0.075 | 0.037 | 0.036 |
| Stance time asymmetry (s) | 0.053 | 0.049 | 0.071 | 0.071 | 0.075 | 0.042 | 0.037 | |
| Swing time asymmetry (s) | 0.053 | 0.048 | 0.071 | 0.071 | 0.074 | 0.045 | 0.038 | |
| Step length asymmetry (s) | 0.068 | 0.077 | 0.014 | 0.007 | 0.031 | 0.036 | 0.026 | |
| Lab—25 m circuit with obtuse curves at each end #1—outdoor: level ground, asphalt #2—outdoor: level ground asphalt, with one step onto paving (slightly uneven/irregular surface) #3—outdoor: paving but slightly uneven/irregular surface approaching a revolving door #4—indoor: level walking on vinyl with a slight right turn onto stair ascent (11 steps), turn left on landing to next stair ascent (11 steps), level walking with slight turn left through door onto carpet #5—indoor: level walking on vinyl in narrow corridor through door with slight turn right onto stair descent (8 steps), turn right on landing to next stair descent (13 steps), level walking with immediate turn left through door and into narrow corridor. | ||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moore, J.; Stuart, S.; McMeekin, P.; Walker, R.; Celik, Y.; Pointon, M.; Godfrey, A. Enhancing Free-Living Fall Risk Assessment: Contextualizing Mobility Based IMU Data. Sensors 2023, 23, 891. https://doi.org/10.3390/s23020891
Moore J, Stuart S, McMeekin P, Walker R, Celik Y, Pointon M, Godfrey A. Enhancing Free-Living Fall Risk Assessment: Contextualizing Mobility Based IMU Data. Sensors. 2023; 23(2):891. https://doi.org/10.3390/s23020891
Chicago/Turabian StyleMoore, Jason, Samuel Stuart, Peter McMeekin, Richard Walker, Yunus Celik, Matthew Pointon, and Alan Godfrey. 2023. "Enhancing Free-Living Fall Risk Assessment: Contextualizing Mobility Based IMU Data" Sensors 23, no. 2: 891. https://doi.org/10.3390/s23020891
APA StyleMoore, J., Stuart, S., McMeekin, P., Walker, R., Celik, Y., Pointon, M., & Godfrey, A. (2023). Enhancing Free-Living Fall Risk Assessment: Contextualizing Mobility Based IMU Data. Sensors, 23(2), 891. https://doi.org/10.3390/s23020891