
Overview of Space-Capable Global Navigation Satellite Systems Receivers: Heritage, Status and the Trend towards Miniaturization

 ,
,  ,
,
Abstract
1. Introduction
2. Heritage and Status
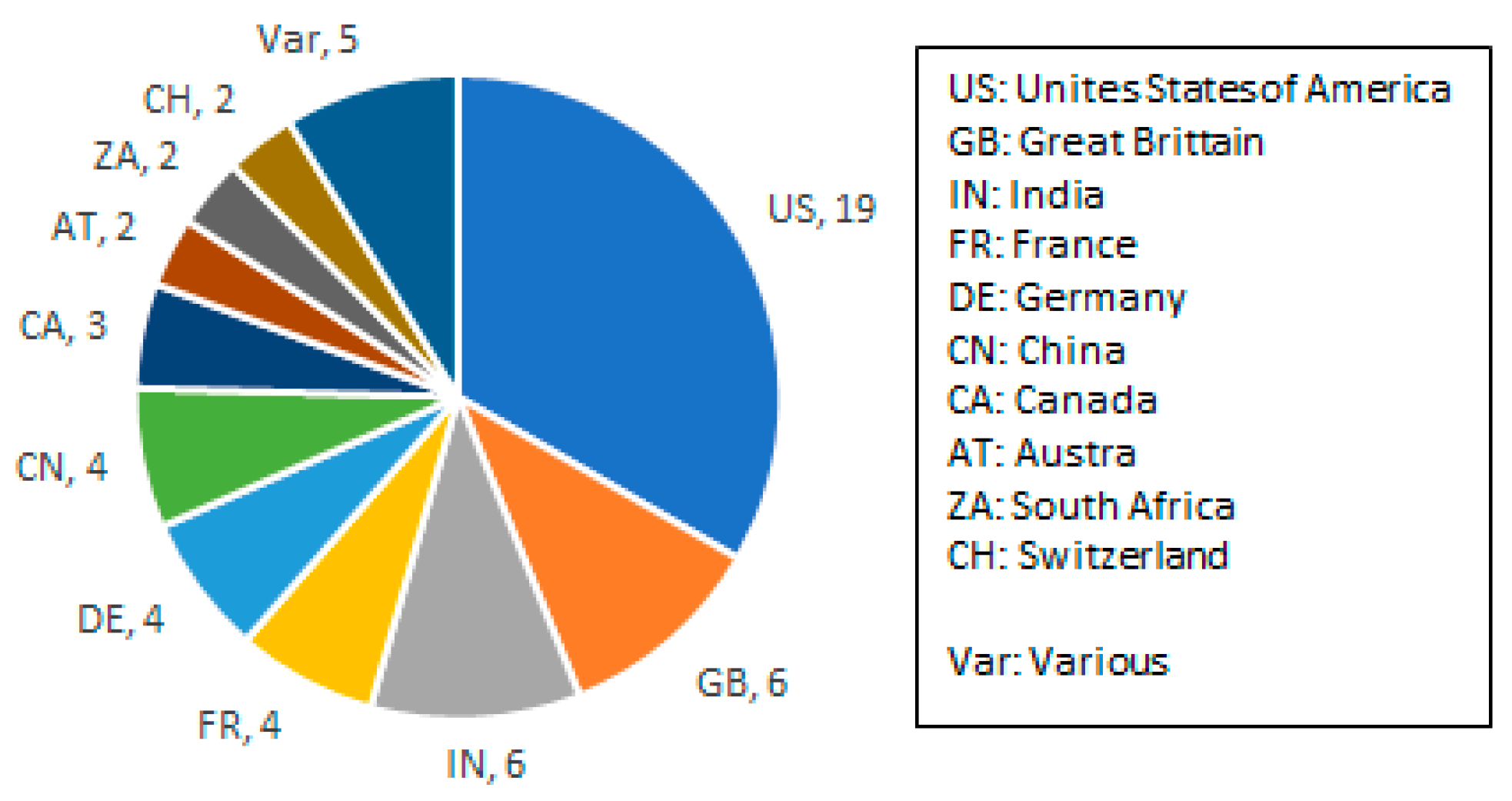
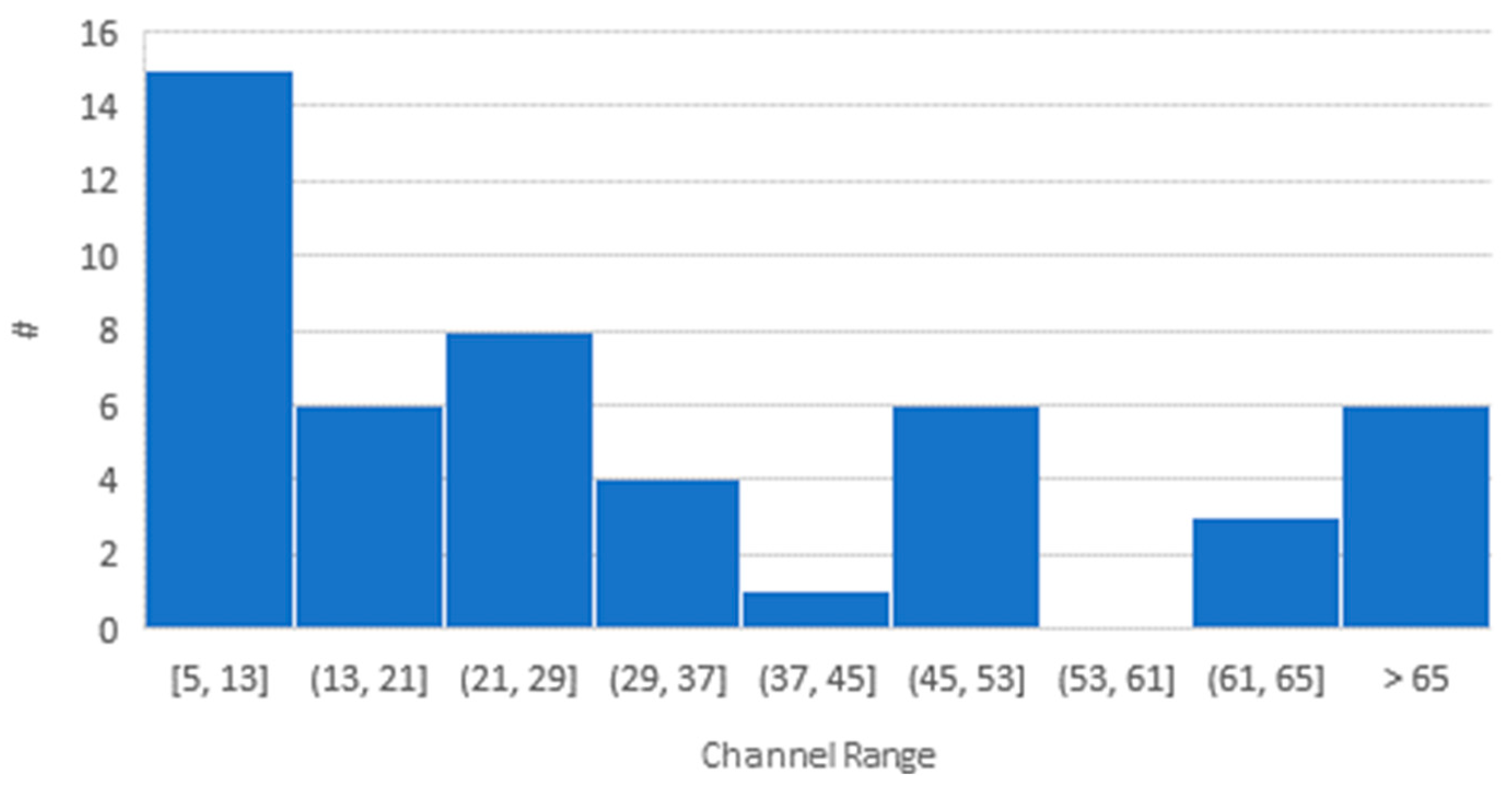
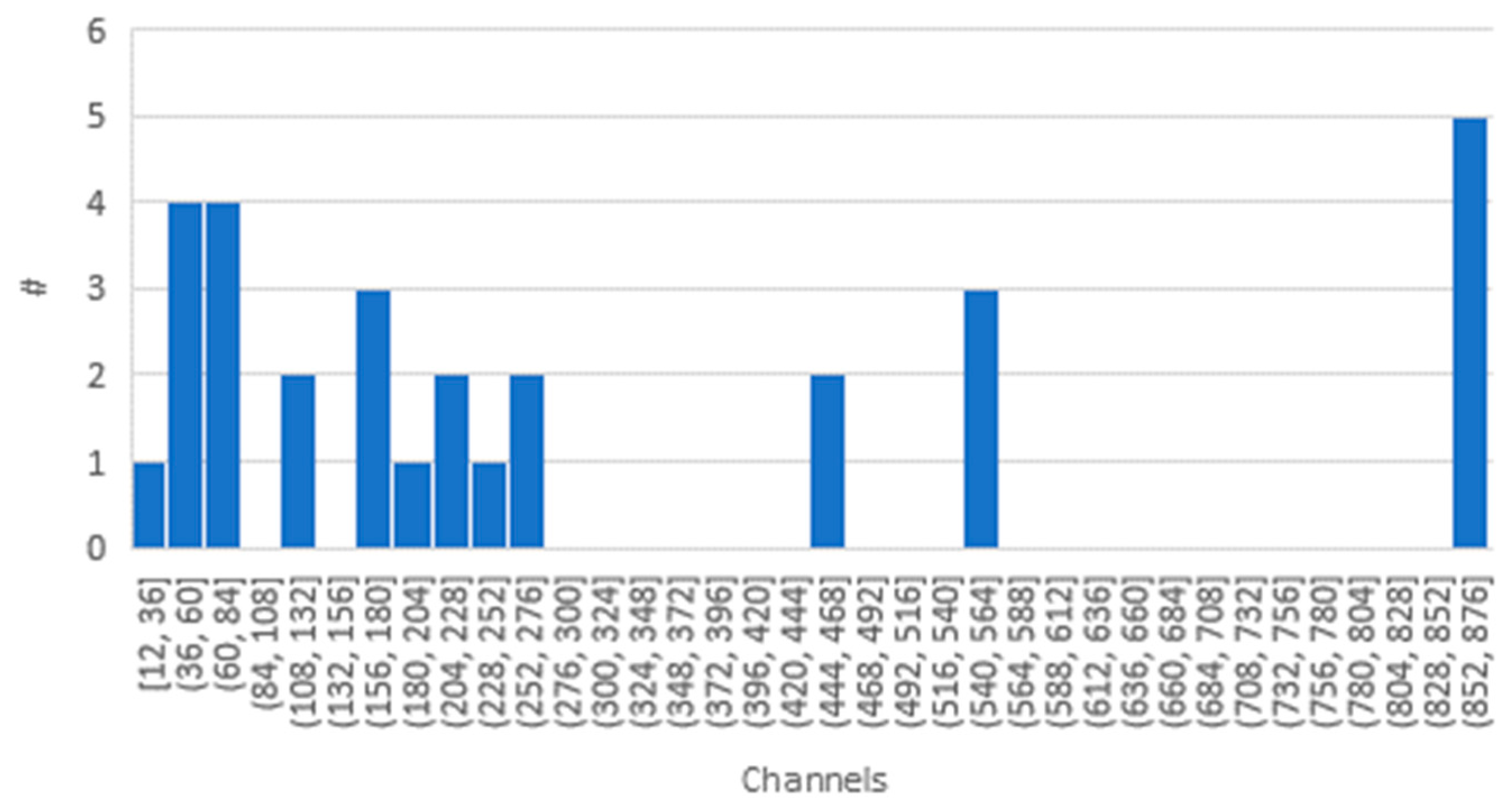
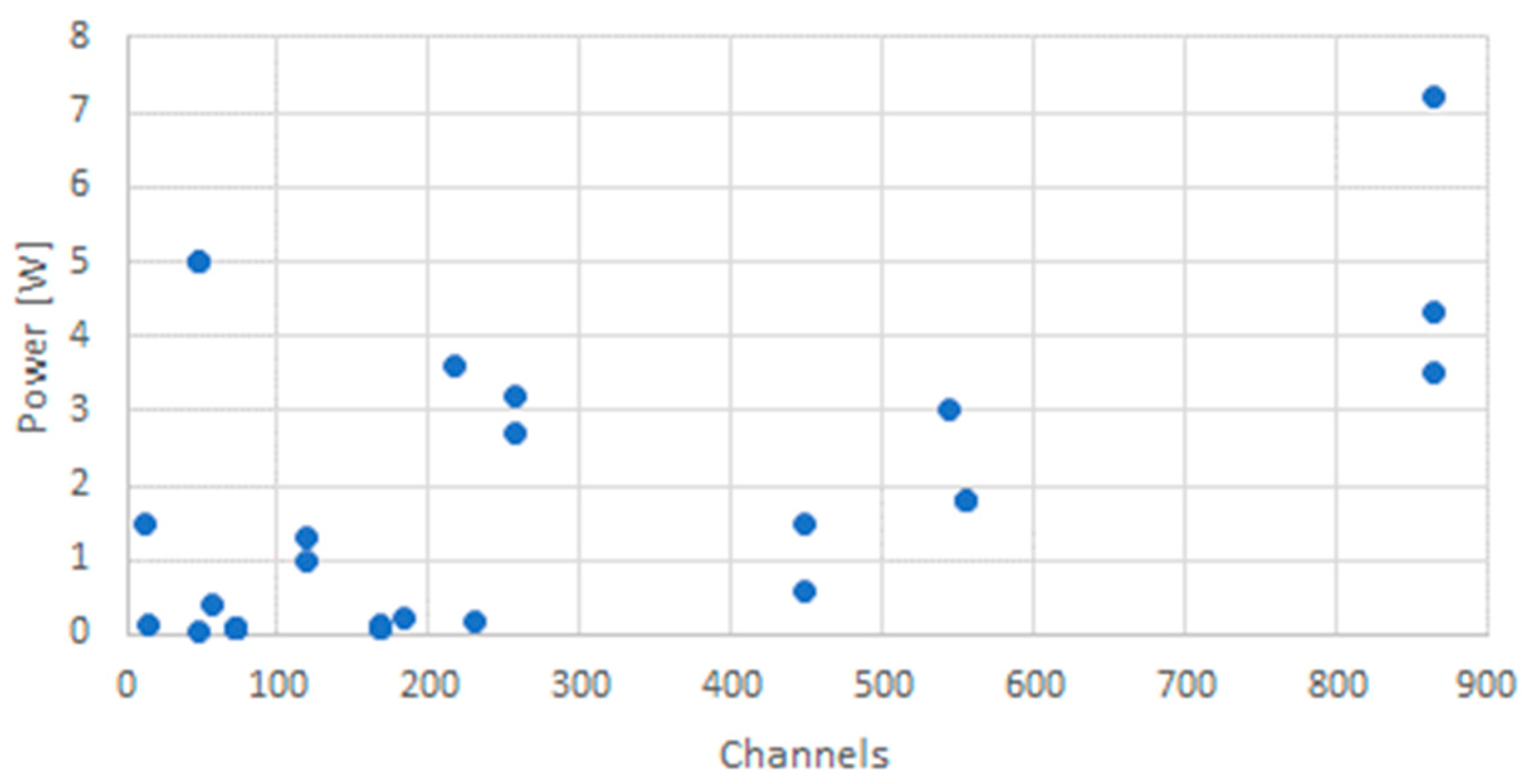
2.1. Overview and Statistics
2.2. GNSS Navigation Receivers
2.3. Analysis
3. Outlook and Trends
3.1. Future Candidate Space Receivers
3.2. Miniaturization
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Supplier (Country) | Channels Signals | Ant. | Power [W] | Mass [gr] | Size [mm] | TID [krad] | Missions | Reference |
|---|---|---|---|---|---|---|---|---|
| Viceroy General Dynamics (US) | 12–18 GPS L1 C/A | 1–2 | 7.0 | 1100 | N/A | 15 | MSTI-3, Seastar, MIR, Orbview | [16] |
| Viceroy-4 General Dynamics (US) | 12 GPS L1 C/A | 1–2 | 7.0 | 1100 | 152 × 132 × 43 | N/A | MIR, KompSat-1, GOES | [37] |
| Sentinel M-Code General Dynamics (US) | 64 GPS L1 & L2, C/A Code, P(Y), M-Code, L2C optional | 2 | <9 | 2500 | 180 × 60 × 60 | 100 | Classified | [38] |
| Explorer General Dynamics (US) | 12 GPS L1 C/A | 1–2 | 7.0 | 1200 | 160 × 142 × 43 | N/A | N/A | [39] |
| GPSDR (Monarch) JPL/Motorola (US) | 6 GPS L1, C/A, L2, P | 1 | 29.0 | 28,000 | N/A | N/A | Topex/Poseidon 1992 | [3] |
| GEM-S Rockwell Collins (US) | 5 GPS L1 C/A P | 1 | 6.5 | 400 | 140 × 150 × 15 | N/A | BIRD | [40] |
| TurboRogue NASA/JPL (US) | N/A | N/A | N/A | N/A | N/A | N/A | MicroLab-1, Oersted | [5] |
| BlackJack (TRSR-2) NASA/JPL (US) | 48 GPS L1, P1, P2 | 4 | 15.0 | 3200 | N/A | N/A | CHAMP | [41] |
| IGOR Broad Reach Eng. (US) | 16 × 3 GPS L1 C/A, L1/L2 P(Y) | 4 | 10.0 | 4600 | N/A | 20 | Formosat-3/COSMIC, TerraSAR-X, TanDEM-X | [16] |
| TriG JPL, MOOG Broad Reach (US) | 24 × 2 GPS/GLO L1/L2, (GAL E1/E5a) | 4 | 55.0 | 6000 | 190 × 220 × 120 | N/A | Formosat-7/COSMIC-2 | [16] |
| TriG RO MOOG Broad Reach (US) | 16 L1 L2 L5 Lx | 4–16 | 60.0 | 5200 | 190 × 220 × 120 | N/A | Sentinal 6A | [42] |
| TriG POD MOOG Broad Reach (US) | 16 GPS L1 L2 L5 Lx | 4 | 20.0 | 2800 | 190 × 140 × 120 | N/A | OTB-1 (Orbital Test Bed-1) | [42] |
| Navigator MOOG Broad Reach (US) | 12 GPS L1 C/A | 2 | 12.0 | 2300 | 190 × 240 × 80 | >100 | MMS, Shuttle-HSM-4 | [42] |
| Pyxis POD MOOG Broad Reach (US) | 12 GPS L1, L1G, E2 | 4 | 20.0 | 2800 | 190 × 140 × 120 | N/A | N/A | [15] |
| TRE-G3T Javad (US) | 216 GPS L1, L2, L5, Galileo E1, E5a, E5b, AltBOC, E6, Beidou B1, B2 | N/A | 3.60 | 77 | 80 × 100 | N/A | ACES Experiment on ISS | [43] |
| TR-2G Javad (US) | 216 GPS L1, Galileo E1, BeiDou E1, QZSS B1, SBAS L1, KFK WAAS/EGNOS | 1 | N/A | 21 | 57 × 88 × 12 | N/A | N/A | [44] |
| Stratos Spire (US) | N/A GPS L1, L2 | N/A | ~4 | ~200 | N/A | N/A | Lemur | [45] |
| GPSRM 1 Pumpkin Inc. (US) | 24 GPS L1/L2/L2C and GLONASS L1/L2 | 1 | 1.3 | 106 | 96 × 90 × 12 | N/A | N/A | [46] |
| OEMV-1G Hexagon | NovAtel (CA) | 14 GPS L1 | N/A | 1.0 | 21 | 46 × 71 × 13 | N/A | RAX, CanX 4/5 | [47] |
| OEM4-G2L Hexagon | NovAtel (CA) | 24 GPS L1, L2, L3, L5, Galileo E1, E5a, E5b, AltBOC, Beidou B1, B2 (all tbc) | N/A | 1.6 | 56 | 100 × 60 × 16 | N/A | CASSIOPE, CanX-2 | [48] |
| OEM4-719 Hexagon | NovAtel (CA) | 555 GPS L1, L2, L5, Galileo E1, Beidou B1 (all but E6,B3) | N/A | 1.8 | 31 | 46 × 71 × 11 | N/A | Bobcat-1 | [49] |
| PODRIX RUAG (AT) | 18 × 2 GPS L1/L2/L5, Galileo E1/E5a | 1 | 15.0 | 3000 | N/A | 50 | (SWARM, Sentinel-3) | [15] |
| GPS POD RUAG (AT) | 8 × 3 GPS L1 C/A, L1/L2 P(Y) | 1 | 8.5 | 2800 | N/A | >20 | SWARM, Sentinel, ICEsat-2 | [16] |
| PolaRx2 Septentrio (BE) | 48 GPS L1, L2 | N/A | N/A | 190 | 180 × 100 × 15 | 9 | Tet-1 | [23] |
| NaviLEO SpacePNT (CH) | < = 48 GPS L1 C/A L5I/Q Galileo E1b E5a E6 | 1–2 | 8.0 | 1300 | 234 × 121 × 66 | N/A | N/A | [50] |
| PODRIX Beyond Gravity (CH) | 2 × 18 GPS L1, L2, Galileo E1, E5a | 2 | 15.0 | 3000 | 280 × 240 × 81 | Sentinel-6A | [51] | |
| Celeste Spacemanic, s.r.o (CZ) | N/A N/A | 1 | 0.1 | 25 | 67 × 42 × 7 | N/A | [52] | |
| LION Airbus (DE) | 36 GPS L1/L2/L5, Galileo E1/E5a | 1–4 | 15.0 | 6000 | N/A | 50 | SARah, CSO, Metop-5G | [16] |
| Mosaic GNSS Airbus (DE) | 8 GPS L1 C/A | 1 | 10.0 | 4000 | N/A | 10 | SARLupe, TerraSAR-X, Aeolus | [16] |
| Phoenix-S DLR (DE) | 12 GPS L1 C/A | 1 | 0.9 | 100 | N/A | 15 | PROBA-2 & -V, PRISMA, TET | [16] |
| GPS-110 BST (DE) | N/A N/A | 2 | 3.0 | 285 | 91 × 84 × 41 | N/A | Kent Ridge-1 | [53] |
| TopStar 3000 Thales-Alenia (FR) | 12–16 GPS L1 C/A | 1–4 | 1.5 | 1500 | N/A | >30 | Demeter, Kompsat-2 | [16] |
| Lagrange Thales-Alenia (FR) | 12 × 3 GPS L1 C/A, L1/L2 P(Y) | 1 | 30.0 | 5200 | N/A | 20 | Radarsat-2, COSMO-Skymed, GOCE | [16] |
| Tensor Thales-Alenia (FR) | 9 GPS L1 C/A | 1–4 | 15.0 | 4000 | N/A | 100 | Globalstar, SAC-C, ATV | [15] |
| GNSS S/W Rcv. Syrlinks (FR) | 9 GPS L1 C/A, Galileo E1 | 1 | 5.0 | 1000 | N/A | 10 | Taranis | [16] |
| N-SPHERE SAFRAN (FR) | N/A N/A | N/A | N/A | N/A | N/A | 15 | GOMX-5 Gomspace A/S | [54] |
| GNSS-701 AAC ClydeSpace (GB) | 120 GPS L1, Beidou B1, Galileo E1 | 1 | 1.0 | 160 | 94 × 56 × 26 | 10 | N/A | [55] |
| SGR-05U SSTL (GB) | 12 GPS L1 C/A | 1 (tbc) | 0.8 | 45 | 70 × 45 × 10 | >11 | N/A | [56] |
| SGR-10 SSTL (GB) | 24 GPS L1 C/A | 2 | 5.5 | 1000 | N/A | 10 | Tsinghua-1, BILSAT, DART | [16] |
| SGR-20 SSTL (GB) | 24 GPS L1 C/A | 4 | 6.0 | 1000 | 160 × 180 × 50 (est.) | N/A | TopSat, Uo-Sat 12, OCO-3, Proba-1 | [57] |
| SGR-Axio SSTL (GB) | 24 GPS L1 C/A, Option G2, E1, L2C | 1–4 | 4.0 | 1000 | 160 × 180 × 50 | <5 | N/A | [58] |
| SGR-Ligo SSTL (GB) | 24 GPS L1 C/A, Option G1, E1 | 1–2 | <0.5 | 90 | 92 × 87 × 12 | >5 | N/A | [59] |
| GRAS/GPSOS SAAB (SE) | 12 GPS C/A, P1/2 | 3 | 30.0 | 30,000 | N/A | N/A | METOP | [15] |
| NGPS-03-422 NewSpace Systems (ZA) | 12 GPS L1 | 1 | 1.0 | 130 | 96 × 96 × 18 | 10 | N/A | [60] |
| NGPS-01-422 NewSpace Systems (ZA) | 12 GPS L1 | 1 | 1.5 | 500 | 155 × 76 × 34 | 10 | N/A | [60] |
| Orion B16-C Navspark (TW) | 230 Dual-frequency GPS/GLONASS/Galileo/Beidou/QZSS | act. | 0.21 | 1.6 | 12 × 16 × 3 | N/A | N/A | [61] |
| GS50 GranStal (CN) | 48 GPS L1, GLONASS Lq, Beidou B1 | 1 | 0.8 | 30 | 51 × 17 | N/A | N/A | [62] |
| GSD700 GranStal (CN) | 440 GPS: L1, L2C/L2P, L5GLONASS L1, L2, BeiDou: B1, B2, B3, Galileo E1, E5a, E5b, SBAS L1 C/ | 1 | 1.7 | 45 | 100 × 60 × 9 | N/A | N/A | [63] |
| COSGNSS COSATS Co., Ltd. (CN) | N/A BDS B1/B2, GPS L1/L2 | 1 | 2.4 | 150 | 56 × 54 × 11 | N/A | N/A | [64] |
| J150 Beidoustar (CN) | GPS L1/L2, BDS B1/B2/B3, GLONASS G1/G2 | N/A | 2.0 | 100 | 41 × 71 × 13 | N/A | Q-Sat | N/A |
| ACC-GPS-NANO-DR Accord (IN) | 2 × 32 GPS L1 | 1 | 0.5 | 45 | 65 × 75 × 20 | 20 | N/A | [65] |
| ACC-GPS-NANO-NR Accord (IN) | 32 GPS L1 | 1 | 0.5 | 45 | 65 × 75 × 20 | 20 | N/A | [66] |
| ACC-GPS-NavIC-NANO Accord (IN) | 25 GPS L1 | 1 | 1.35 | <45 | 50 × 70 × 14 | 20 | N/A | [67] |
| ACC-GPS-NANO Accord (IN) | 32 GPS L1, SBAS GAGAN | 1 | 0.5 | 45 | 64 × 75 × 1.5 | 20 | N/A | [68] |
| GPS module WARPSPACE (JP) | 167 GPS L1 C/A, GLONASS L1 | 1 | 0.15 | 3 | 24 × 24 × 5 | N/A | N/A | [69] |
Appendix B
| Model Supplier (Country) | Channels Signals | Ant. | Power [W] | Mass [gr] | Size [mm] | Constraints * | Reference |
|---|---|---|---|---|---|---|---|
| TR-G2T Javad (US) | 216 GPS: L1/L2/L2C/L5 Galileo: E1/E5A SBAS | 1 | 1.60 | 34 | 57 × 66 | NLS | [71] |
| TR-3N Javad (US) | 864 GPS: C/A, L1C (P+D), P1, P2, L2C (L+M), L5(I+Q) GLONASS: C/A, L2C, P1, P2, L3 (I+Q) Galileo: E1 (B+C), E5A (I+Q), E5B (I+Q), AltBoc BeiDou: B1, B1-2, B1C(P+D), B5A (I+Q), B2, B5B (I+Q) QZSS: C/A, L1C (P+D), L2C (L+M), L5 (I+Q), SAIF SBAS: L1, L5 IRNSS L5 | 1 | 3.50 | 54 | 57 × 88 × 12 | NLS | [72] |
| TR-3S Javad (US) | 874 GPS: C/A, L1C (P+D) including TMBOC (6,1,4/33), P1, P2, L2C (L+M), L5 (I+Q) GLONASS: C/A, P1, P2, L2C, L3 (I+Q) Galileo: E1 (B+C) including CBOC (6,1,1/11), E5A (I+Q), E5B (I+Q), AltBoc, E6 (B+C) Beidou: B1, B1C (P+D) including TMBOC (6,1,4/33), B2B (I+Q), B2, B2A (I+Q), AltBoc, B3 QZSS: C/A, L1C (P+D) including TMBOC (6,1,4/33), L2C (L+M), L5 (I+Q), L6 (L61/L62), L1S, L1Sb, L5SL1, L5 (P+D) SBAS: L1, L5 (P+D) IRNSS: L5, S | 1 | N/A | 30 | 66 × 57 × 11 | NLS | [73] |
| TR-2S Javad (US) | 874 GPS: C/A, L1C (P+D) including TMBOC (6,1,4/33), P1, P2, L2C (L+M), L5 (I+Q) GLONASS: E1 (B+C) including CBOC (6,1,1/11), E5A (I+Q), E5B (I+Q), AltBoc, E6 (B+C) Galileo: E1 (B+C) including CBOC (6,1,1/11), E5A (I+Q), E5B (I+Q), AltBoc, E6 (B+C) BeiDou: B1, B1C (P+D) including TMBOC (6,1,4/33), B2B (I+Q), B2, B2A (I+Q), AltBoc, B3 QZSS: C/A, L1C (P+D); TMBOC (6,1,4/33), L2C (L+M), L5 (I+Q), L6 (L61/L62), L1S, L1Sb, L5S SBAS: L1, L5 (P+D), IRNSS: L5 | 1 | N/A | 20 | 55 × 40 × 11 | NLS | [74] |
| TRE-3S Javad (US) | N/A GPS: C/A, L1C (P+D) including TMBOC (6,1,4/33), P1, P2, L2C (L+M), L5 (I+Q) GLONASS: C/A, P1, P2, L2C, L3 (I+Q) Galileo: E1 (B+C) including CBOC (6,1,1/11), E5A (I+Q), E5B (I+Q), AltBoc, E6 (B+C) QZSS: C/A, L1C (P+D) including TMBOC (6,1,4/33), L2C (L+M), L5 (I+Q), L6 (L61/L62), L1S, L1Sb, L5S BeiDou: B1, B1C (P+D) including TMBOC (6,1,4/33), B2B (I+Q), B2, B2A (I+Q), AltBoc, B3 IRNSS: L5, S SBAS: L1, L5 (P+D) | 1 | 3.7–5.6 | 87 | 80 × 100 | NLS | [75] |
| TRE-DUO Javad (US) | 864 GPS: C/A, L1C (P+D), P1, P2, L2C (L+M), L5(I+Q) GLONASS: C/A, L2C, P1, P2, L3 (I+Q) Galileo: E1 (B+C), E5A (I+Q), E5B (I+Q), AltBoc BeiDou: B1, B1-2, B1C(P+D), B5A (I+Q), B2, B5B (I+Q) QZSS: C/A, L1C (P+D), L2C (L+M), L5 (I+Q), SAIF SBAS: L1, L5 IRNSS L5 | 2 | 4.30 | 120 | 100 × 120 | NLS | [76] |
| TRE-Quattro Javad (US) | 864 GPS: C/A, P1, P2, L2C (L+M), L1C (I+Q) Galileo: E1 (B+C) GLONASS: C/A, P1, P2, L2C QZSS: C/A, L2C (L+M), L1C (I+Q), SAIF BeiDou: B1,B1R, L1C (I+Q) SBAS: L1 | 4 | 7.20 | 130 | 100 × 120 | NLS | [77] |
| Quattro-R Javad (US) | 216 GPS: L1, L2, L2C | 4 | 5.20 | 130 | 100 × 120 | NLS | [78] |
| OEM615 Hexagon|NovAtel (CA) | 120 GPS: L1, L2, L2C GLONASS: L1, L2 BeiDou: B1 Galileo: E1 SBAS QZSS | N/A | 1.00 | <24 | 46 × 71 × 11 | VL | [43] |
| OEM628 Hexagon|NovAtel (CA) | 120 GPS: L1, L2, L2C, L5 GLONASS: L1, L2 BeidDou: B1, B2 Galileo: E1, E5a, E5b, AltBOC SBAS QZSS: L1, L2C, L5 | N/A | 1.30 | 37 | 60 × 100 | VL | [43] |
| OEM7500 Hexagon|NovAtel (CA) | N/A GPS: L1 C/A, L1C, L2C, L2P, L5 GLONASS: L1 C/A, L2 C/A, L2P, L3 Galileo: E1, E5a, E5b, AltBOC BeiDou: B1I, B1C, B2I, B2a, B2b QZSS: L1 C/A, L1C, L1S, L2C, L5 NavIC (IRNSS): L5 SBAS L1, L5 L-Band up to 5 channels | N/A | 1.50 | 12 | 33 × 55 × 4 | VL | [79] |
| OEM7600 Hexagon|NovAtel (CA) | 555 GPS: L1 C/A, L1C, L2C, L2P, L5 GLONASS: L1 C/A, L2 C/A, L2P, L3, L5 Galileo: E1, E5 AltBOC, E5a, E5b BeiDou: B1I, B1C, B2I, B2a, B2b QZSS: L1 C/A, L1C, L1S, L2C, L5 NavIC (IRNSS): L5 SBAS: L1, L5 L-Band: up to 5 channels | N/A | 1.80 | 31 | 35 × 55 × 13 | VL | [80] |
| OEM7700 Hexagon|NovAtel (CA) | 555 GPS: L1 C/A, L1C, L2C, L2P, L5 GLONASS: L1 C/A, L2 C/A, L2P, L3, L5 Galileo: E1, E5 AltBOC, E5a, E5b, E6 BeiDou: B1I, B1C, B2I, B2a, B2b, B3I QZSS: L1 C/A, L1C, L1S, L2C, L5, L6 NavIC (IRNSS): L5 SBAS: L1, L5 L-Band: up to 5 channels | N/A | 1.80 | 31 | 46 × 71 × 8 | VL | [81] |
| OEM7720 Hexagon|NovAtel (CA) | 555 GPS: L1 C/A, L1C, L2C, L2P, L5 GLONASS: L1 C/A, L2 C/A, L2P, L3, L5 Galileo: E1, E5 AltBOC, E5a, E5b BeiDou: B1I, B1C, B2I, B2a, B2b QZSS: L1 C/A, L1C, L1S, L2C, L5 NavIC (IRNSS): L5 SBAS: L1, L5 L-Band: up to 5 channels | 2 | 2.70 | 29 | 46 × 71 × 8 | VL | [82] |
| OEM729 Hexagon|NovAtel (CA) | 555 GPS: L1 C/A, L1C, L2C, L2P, L5 GLONASS: L1 C/A, L2 C/A, L2P, L3, L5 Galileo: E1, E5 AltBOC, E5a, E5b, E6 BeiDou: B1I, B1C, B2I, B2a, B2b, B3I QZSS: L1 C/A, L1C, L1S, L2C, L5, L6 NavIC (IRNSS): L5 SBAS: L1, L5 L-Band: up to 5 channels | 1 | 1.80 | 48 | 60 × 100 × 9 | VL | [83] |
| simpleRTK2B lite ArduSimple (AD) | N/A GPS: L1C/A L2C GLONASS: L1OF L2OF Galileo: E1-B/C E5b BeiDou: B1I B2I QZSS: L1C/A L2C SBAS: WAAS, EGNOS, MSAS, GAGAN and SouthPAN | 1 | 0.40 | 7.8 | 41 × 28 | NLS | [84] |
| simpleRTK3B pro ArduSimple (AD) | 448 GPS: L1C/A L1PY L2C L2P L5 GLONASS: L1CA L2CA L2P L3 CDMA Galileo: E1 E5a E5b E5 AltBloc E6 BeiDou: B1I B1C B2a B2I B3 QZSS: L1C/A L2C L5 Navic: L5 SBAS: WAAS, EGNOS, MSAS, GAGAN, SDCM (L1 L5) | 1 | 1.50 | 24 | 69 × 53 | NLS | [85] |
| AsteRx4 Septentrio (BE) | 544 GPS: L1, L2, L5 GLONASS: L1, L2, L3 Galileo: E1, E5ab, AltBoc, E6 BeiDou: B1, B2, B3 IRNSS: L5 QZSS: L1, L2, L5 Galileo, Beidou, IRNSS, E6/B3 and AltBoc are optional features | N/A | 3.00 | 55 | 61 × 82 | VL | [43] |
| mosaic-X5 Septentrio (BE) | 448 GPS: L1C/A, L1PY, L2C, L2P, L5 GLONASS: L1CA, L2CA, L2P, L3 CDMA Beidou: B1I, B1C, B2a, B2b, B2I, B3 Galileo: E1, E5a, E5b, E5 AltBoc, E6 QZSS: L1C/A, L1 C/B, L2C, L5 Navic: L5 SBAS: Egnos, WAAS, GAGAN, MSAS SDCM (L1, L5) On module L-band | N/A | 0.60 | 7 | 31 × 31 × 4 | VL | [86] |
| PolaRx2e@ Septentrio (BE) | 48 L1, L2 SBAS: EGNOS, WAAS | 3 | 5.00 | 120 | 160 × 100 × 13 | VL, HL | [87] |
| PolaRx2eh Septentrio (BE) | 48 L1, L2 SBAS: EGNOS, WAAS | 2 | 5.00 | 120 | 160 × 100 × 13 | VL, HL | [87] |
| ZED-F9P-04B u-blox (CH) | 184 GPS: L1C/A L2C GLONASS: L1OF L2OF Galileo: E1B/C E5b BeiDou: B1I B2I QZSS: L1C/A L1S L2C SBAS: L1C/A | N/A | 0.21 | 2.0 (est.) | 17 × 22 × 2.4 | CoCom | [88] |
| MAX-M8Q u-blox (CH) | 72 GPS: L1 C/A QZSS: L1 C/A SAIF GLONASS: L10F BeiDou: B1I Galileo: E1B/C SBAS: L1 C/A: WAAS, EGNOS, MSAS, GAGAN | N/A | 0.07 | 2.0 (est.) | 9.7 × 10.1 × 2.5 | CoCom | [89] |
| MAX-M8W u-blox (CH) | 72 GPS: L1 C/A QZSS: L1 C/A SAIF GLONASS: L10F BeiDou: B1I Galileo: E1B/C SBAS: L1 C/A: WAAS, EGNOS, MSAS, GAGAN | N/A | 0.07 | 2.0 (est.) | 9.7 × 10.1 × 2.5 | CoCom | [90] |
| MAX-M8C u-blox (CH) | 72 GPS: L1 C/A QZSS: L1 C/A SAIF GLONASS: L10F BeiDou: B1I Galileo: E1B/C SBAS: L1 C/A: WAAS, EGNOS, MSAS, GAGAN | N/A | 0.07 | 2.0 (est.) | 9.7 × 10.1 × 2.5 | CoCom | [91] |
| NEO-M8Q-01A u-blox (CH) | 72 GPS: L1 C/A QZSS: L1 C/A GLONASS: L10F BeiDou: B1I Galileo: E1B/C SBAS: L1 C/A: WAAS, EGNOS, MSAS, GAGAN | N/A | 0.07 | 2.0 (est.) | 12.2 × 16.0 × 2.4 | CoCom | [92] |
| piNAV-NG SkyFox Labs (CZ) | 15 GPS: L1 C/A | 1 | 0.13 | 24 | 71.1 × 45.7 × 11 | NLS | [93] |
| Q20 QinetiQ (GB) | 12 C/A L1 | 1 (act.) | 0.1–1.522 | N/A | 35 × 50 × 5 | VL | [94] |
| NTL102.SMT NTLab (LT) | N/A GPS: L1, L5 NavIC: L5, S-band and SBAS L1 | 2 | <0.65 | <15 | 30.5 × 25.5 × 4.2 | NLS | [95] |
| NTL103.SMT NTLab (LT) | N/A GPS: L1, L2 GLONASS: L1, L2 NavIC: L5,S-band and SBAS L1 | 2 | 0.19–0.8 | <15 | 38 × 25.5 × 3.5 | NLS | [96] |
| NTL104.SMT NTLab (LT) | 256+128 GPS: L1, L2, L5 GLONASS: L1, L2 Galileo: E1, E5a, E5b BeiDou: B1, B2 NavIC (IRNSS) L5, S-band and SBAS L1 | 2 | 3.20 | <25 | 71 × 46 × 10 | NLS | [97] |
| NTL106.SMT NTLab (LT) | 256 GPS: L1, L2/L5 GLONASS: L1, L2 Galileo: E1, E5a/E5b BeiDou: B1, B2 NavIC (IRNSS) L5, S-band and SBAS L1 | 1 | 2.70 | 25 | 71 × 46 × 10 | NLS | [98] |
| TESEO-LIV3F STMicroelect- ronics N.V. (NL) | N/A GPS: L1C/A GLONASS: L1OF BeiDou: B1 Galileo: E1B/C SBAS: L1C/A QZSS: L1C/A | 1 | 0.08 | N/A | 9.7 × 10 | NLS | [99] |
| STA8089G STMicroelect- ronics N.V. (NL) | 48 GPS, Galileo, GLONASS, BeiDou and QZSS | 1 | 0.04 | N/A | 7 × 7 × 1.0 | NLS | [99] |
| S1216F8-GI3 SkyTraQ (TW) | 56 GPS: L1 GLONASS: L1 Gagan: L1 NavIC L5, (not GPS L5) | 1 | 0.40 | 2 | 12 × 16 | NLS | [100] |
| S1216F8-GL SkyTraQ (TW) | 167 GPS: L1 C/A GLONASS: L1 C/A | 1 | 0.13 | 1.6 | 12.2 × 16 | NLS | [101] |
| PX1122C SkyTraQ (TW) | 230 GPS: L1/L2C Galileo E1/E5b Beidou: B1I/B2I QZSS: L1/L2C | 1 | 0.17 | 1.7 | 12 × 16 | NLS | [102] |
| Venus816 SkyTraQ (TW) | N/A GPS: L1 GLONASS: L1/L2 QZSS, SBAS Capable | 2 | 0.07 | 0.3 (est.) | 5 × 5 | VL, HL | [103] |
| Venus828F SkyTraQ (TW) | N/A GPS: L1 Beidou: B1 QZSS, SBAS | N/A | 0.07 | 0.2 | 7 × 7 × 1.4 | VL, HL | [104] |
| Venus838FLPx SkyTraQ (TW) | 167 L1, B1 | N/A | 0.10 | 0.3 | 10 × 10 × 1.3 | VL, HL | [105] |
| NanoSense GPS Kit GomSpace A/S (DK) | 167 GPS: L1 | N/A | 1.80 | 31 | 46 × 72 × 11 | CoCom removed | [106] |
| SoftSpot Syntony (FR) | 555 GPS: L1 C/A; L1C; L2C; L5 Galileo: E1-OS; E5a; E5b; E6-CS GLONASS: G1 & G2 BEIDOU: B1 & B2 SBAS: WAAS; EGNOS; MSAS Military codes, IRNSS, GBAS, DGPS | N/A | 10.00 | 500 | 131 × 106 × 25 | N/A | [107] |
References
- Hoffman, E.J.; Birmingham, W.P. GPSPAC: A Spaceborne GPS Navigation Set. In Proceedings of the IEEE PLANS (Position Location and Navigation Symposium), San Diego, CA, USA, 6–9 November 1978; pp. 13–20. [Google Scholar]
- Birmingham, W.P.; Miller, B.L.; Stein, W.L. Experimental Results of Using the GPS for Landsat 4 Onboard Navigation. Navig. J. Inst. Navig. 1983, 30, 244–251. [Google Scholar] [CrossRef]
- Melbourne, W.G.; Davis, E.S.; Yunck, T.P.; Tapley, B.D. The GPS flight experiment on TOPEX/POSEIDON. Geophys. Res. Lett. 1994, 21, 2171–2174. [Google Scholar] [CrossRef]
- Yunck, T.P.; Bertiger, W.I.; Wu, S.C.; Bar-Sever, Y.E.; Christensen, E.J.; Haines, B.J.; Lichten, S.M.; Muellerschoen, R.J.; Davis, E.S.; Guinn, J.R.; et al. First assessment of GPS based reduced dynamic orbit determination on TOPEX/Poseidon. Geophys. Res. Lett. 1994, 21, 541–544. [Google Scholar] [CrossRef]
- Ware, R.; Rocken, C.; Solheim, F.; Exner, M.; Schreiner, W.; Anthes, R.; Feng, D.; Herman, B.; Gorbunov, M.; Sokolovskiy, S.; et al. GPS sounding of the atmosphere from low Earth orbit: Preliminary Results. Bull. Am. Meteorol. Soc. 1996, 77, 19–40. [Google Scholar] [CrossRef]
- Lowe, S.T.; LaBrecque, J.L.; Zuffada, C.; Romans, L.J.; Young, L.E.; Hajj, G. First spaceborne observation of an Earth-reflected GPS signal. Radio Sci. 2002, 37, 1–28. [Google Scholar] [CrossRef]
- Duan, B.; Hugentobler, U.; Montenbruck, O.; Steigenberger, P. Performance of Galileo Satellite Products Determined from Multi-Frequency Measurements. J. Geod. 2023, 97, 32. [Google Scholar] [CrossRef]
- Jin, S.; Wang, Q.; Dardanelli, G. A Review on Multi-GNSS for Earth Observation and Emerging Applications. Remote Sens. 2022, 14, 3930. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Multi-GNSS signal-in-space range error assessment–Methodology and results. Adv. Space Res. 2018, 61, 3020–3038. [Google Scholar] [CrossRef]
- Unwin, M.J.; Oldfield, M.K. The Design and Operation of a COTS Space GPS Receiver. In Proceedings of the 23rd Annual AAS Guidance & Control Conference, Breckenridge, CO, USA, 2–6 February 2000. [Google Scholar]
- Renaudie, C.; Markgraf, M.; Montenbruck, O.; Garcia, M. Radiation testing of commercial-off-the-shelf GPS technology for use on low earth orbit satellites. In Proceedings of the 2007 9th European Conference on Radiation and Its Effects on Components and Systems, Deauville, France, 10–14 September 2007. [Google Scholar] [CrossRef]
- Munjal, P.; Feess, W.; Ananda, M. A review of spaceborne applications of GPS. In Proceedings of the ION GPS-92, Albuquerque, NM, USA, 16–18 September 1992; pp. 813–823. [Google Scholar]
- Bauer, F.H.; Hartman, K.R.; Lightsey, E.G. Spaceborne GPS current status and future visions. In Proceedings of the IEEE Aerospace Conference Proceedings, Nashville, TN, USA, 28 March 1998; pp. 195–208. [Google Scholar] [CrossRef]
- Montenbruck, O.; Markgraf, M.; Garcia-Fernandez, M.; Helm, A. GPS for Microsatellites–Status and Perspectives. In Proceedings of the Small Satellites for Earth Observation, IAA, Berlin, Germany, 4–8 November 2006; pp. 165–174. [Google Scholar]
- Montenbruck, O.; D’Amico, S. GPS Based Relative Navigation. In Distributed Space Missions for Earth System Monitoring; Space Technology Library; D’Errico, M., Ed.; Springer: New York, NY, USA, 2013; Volume 31. [Google Scholar] [CrossRef]
- Montenbruck, O. Space Applications. In Global Navigation Satellite Systems; Teunissen, P.J.G., Montenbruck, O., Eds.; Springer Handbook; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- GPS Mission Directory. Available online: http://gauss.gge.unb.ca/grads/sunil/missions.htm (accessed on 15 June 2023).
- Narayan, P. An Overview of Smallsat and CubeSat GPS Receiver Technologies. 2023. Available online: https://blog.satsearch.co/2019-11-12-an-overview-of-gps-receivers-for-small-satellites (accessed on 15 June 2023).
- 3Cat-2. Available online: https://nanosatlab.upc.edu/en/missions-and-projects/3cat-2 (accessed on 23 July 2023).
- Emery, W.; Camps, A. (Eds.) Introduction to Satellite Remote Sensing; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar] [CrossRef]
- Leyssens, J.; Markgraf, M. Evaluation of a Commercial-Off-The-Shelf dual- frequency GPS receiver for use on LEO satellites. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1208–1218. [Google Scholar]
- Cacciapuoti, L.; Dimarcq, N.; Salomon, C. The ACES mission: Scientific objectives and present status. In Proceedings of the International Conference on Space Optics—ICSO, Noordwijk, The Netherlands, 27–30 June 2006; p. 105673. [Google Scholar] [CrossRef]
- Montenbruck, O.; Garcia-Fernandez, M.; Williams, J. Performance comparison of semicodeless GPS receivers for LEO satellites. GPS Solut. 2006, 10, 249–261. [Google Scholar] [CrossRef]
- Jales, P.; Esterhuizen, S.; Masters, D.; Nguyen, V.; Correig, O.N.; Yuasa, T.; Cartwright, J. The new Spire GNSS-R satellite missions and products. In Proceedings of the Image and Signal Processing for Remote Sensing XXVI, Online, 21–25 September 2020; Volume 11533, p. 1153316. [Google Scholar] [CrossRef]
- Franklin, G.; Esterhuizen, S.; Galley, C.; Iijima, B.; Larsen, K.; Lee, M.; Liu, J.; Meehan, T.; Young, L. A GNSS receiver for small-sats enabling precision POD, radio occultations, and reflections. In Proceedings of the CubeSats and NanoSats for Remote Sensing II, San Diego, CA, USA, 19–23 August 2018; Volume 10769, pp. 24–34. [Google Scholar] [CrossRef]
- Kursinski, E.; Brandmeyer, J.; Botmick, A.; Gooch, R.; Oliveira, C.; Leroy, S. Initial Results and Validation of PlanetiQ GNSS RO Neutral Atmosphere Measurements. In Proceedings of the AGU Fall Meeting Abstracts, New Orleans, LA, USA, 13–17 December 2021; Volume 2021, p. A25L-1839. [Google Scholar]
- Department of Commerce and Federal Aviation Administration. Introduction to U.S. Export Controls for the Commercial Space Industry, 2nd Edition. November 2017. Available online: https://www.space.commerce.gov/wp-content/uploads/2017-export-controls-guidebook.pdf (accessed on 23 July 2023).
- Kim, J.U.S. Export Controls on GPS/GNSS Equipment, Presentation to National Space-Based PNT Advisory Board Toughen Working Group. 18 March 2022. Available online: https://www.space.commerce.gov/wp-content/uploads/2022-03-US-export-controls-GPS-GNSS-equipment.pdf (accessed on 23 July 2023).
- European Commission: COUNCIL REGULATION (EC) No 428/2009 of 5 May 2009 Setting Up a Community Regime for the Control of Exports, Transfer, Brokering and Transit of Dual-Use Items. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32009R0428 (accessed on 23 July 2023).
- Meehan, T.K.; Duncan, C.B.; Dunn, C.E.; Spitzmesser, D.J.; Srinivasan, J.M.; Munson, T.N.; Ward, J.; Adams, J.C.; How, J.P. “GPS on a Chip”—An Advanced GPS Receiver for Spacecraft. In Proceedings of the 11th International Technical Meeting of the Satellite Division of the Institute of Navigation, GPS-98, Nashville, TN, USA, 15–18 September 1998. [Google Scholar]
- Beuchert, J.; Rogers, A. SnapperGPS—Algorithms for Energy-Efficient Low-Cost Location Estimation Using GNSS Signal Snapshots. In Proceedings of the 19th ACM conference on Embedded Networked Sensor Systems (SenSys’21), Coimbra, Portugal, 15–17 November 2021. [Google Scholar] [CrossRef]
- Powell, T.D.; Martzen, P.D.; Sedlacek, S.B.; Chao, C.-C.; Silva, R.; Brown, A.; Belle, G. GPS Signals in a Geosynchronous Transfer Orbit: “Falcon Gold” Data Processing. In Proceedings of the 1999 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 25–27 January 1999; pp. 575–585. [Google Scholar]
- Srinivasan, J.; Bar-Sever, Y.; Bertiger, W.; Lichten, S.; Muellerschoen, R.; Munson, T.; Spitzmesser, D.; Tien, J.; Wu, S.-C.; Young, L. microGPS: On-orbit Demonstration of a New Approach to GPS for Space Applications. Navig. J. Inst. Navig. 2000, 47, 121–127. [Google Scholar] [CrossRef]
- Kingsbury, R.W.; Self, M.C.; Vittaldev, V.; Foster, C. Dove GPS: An Unconventional Approach to CubeSat Orbit Determination. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, Miami, FL, USA, 16–20 September 2019. [Google Scholar] [CrossRef]
- Janssen, T.; Koppert, A.; Berkvens, R.; Weyn, M. A Survey on IoT Positioning Leveraging LPWAN, GNSS, and LEO-PNT. IEEE Internet Things 2023, 10, 11135–11159. [Google Scholar] [CrossRef]
- Gill, E.; Akos, D.M. Snapshot GNSS receivers for Low-Effort, High-Gain Space Situational Awareness. Adv. Space Res. 2023; submitted. [Google Scholar]
- Viceroy-4 GPS Spaceborne Receiver. Available online: https://satsearch.co/products/general-dynamics-viceroy-4-gps-spaceborne-receiver (accessed on 23 July 2023).
- Sentinel™ M-Code GPS Receiver. Available online: https://satsearch.co/products/general-dynamics-sentinel-m-code-gps-receiver; (accessed on 23 July 2023).
- Explorer GPS Spaceborne Receiver. Available online: https://satsearch.co/products/general-dynamics-explorer-gps-spaceborne-receiver; (accessed on 23 July 2023).
- Gill, E.; Montenbruck, O.; Kayal, H. The BIRD Satellite Mission as a Milestone Towards GPS-based Autonomous Navigation. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 1968–1975. [Google Scholar]
- Montenbruck, O.; Kroes, R. In-flight performance analysis of the CHAMP BlackJack GPS Receiver. GPS Solut. 2003, 7, 74–86. [Google Scholar] [CrossRef]
- Single Board Receiver NavSBR. Available online: https://satcatalog.s3.amazonaws.com/components/45/SatCatalog_-_Moog_-_TriG_POD_-_Datasheet.pdf?lastmod=20210708015459 (accessed on 23 July 2023).
- Giralo, V.; D’Amico, S. Distributed multi-GNSS timing and localization for nanosatellites. Navigation 2019, 66, 729–746. [Google Scholar] [CrossRef]
- TR-2G. Available online: https://www.javad.com/wp-content/uploads/TR-G2_Datasheet_white_2pages-1.pdf (accessed on 23 July 2023).
- Spire Global Nanosatellite Constellation. Available online: https://www.eoportal.org/satellite-missions/spire-global#a-healthy-trend (accessed on 23 July 2023).
- GNSS Receiver Module (GPSRM 1) Kit. Available online: https://www.pumpkinspace.com/store/p58/GNSS_Receiver_Module_%28GPSRM_1%29_Kit.html (accessed on 23 July 2023).
- Kahr, E.; Roth, N.; Montenbruck, O.; Risi, B.; Zee, R.E. GPS Relative Navigation for the CanX-4 and CanX-5 Formation-Flying Nanosatellites. J. Spacecr. Rocket. 2018, 55, 1545–1558. [Google Scholar] [CrossRef]
- OEM4-G2L. Available online: https://satsearch.co/products/novatel-oem4-g2l (accessed on 23 July 2023).
- Croissant, K.; Jenkins, G.; McKnight, R.; Peters, B.C.; Ugazio, S.; van Graas, F. Bobcat-1, the Ohio University CubeSat: Preliminary Data Analysis. In Proceedings of the 2021 International Technical Meeting of The Institute of Navigation, Online, 25–28 January 2021; pp. 625–636. [Google Scholar] [CrossRef]
- naviLEO. Available online: https://satsearch.co/products/spacepnt-navileo (accessed on 23 July 2023).
- PODRIX GNSS Receiver. Available online: https://satcatalog.s3.amazonaws.com/components/1216/SatCatalog_-_Beyond_Gravity_-_PODRIX_GNSS_Receiver_-_Datasheet.pdf?lastmod=20230222073318 (accessed on 23 July 2023).
- Celeste-the GNSS Receiver. Available online: https://satsearch.co/products/spacemanic-celeste-the-gnss-receiver (accessed on 23 July 2023).
- GPS-110. Available online: https://satsearch.co/products/berlin-space-tech-gps-110 (accessed on 23 July 2023).
- SYRLINKS PRESS RELEASE. Available online: https://www.syrlinks.com/en/spatial/syrlinks-releases-n-sphere-a-new-generation-high-end-gps/gnss-receiver (accessed on 23 July 2023).
- GNSS-701-Satellite GNSS Receiver. Available online: https://satsearch.co/products/aac-clyde-gnss-701-satellite-gnss-receiver (accessed on 23 July 2023).
- Weiß, S. Contributons to on Board Navigaton on 1U CubeSats. Ph.D. Thesis, Universitätsverlag der Technischen Universität Berlin, Berlin, Germany, 2022. [Google Scholar] [CrossRef]
- Duncan, S. Development and Exploitation of GPS Attitude Determination for Microsatellites. Ph.D. Thesis, University of Surrey, Guildford, UK, 2010. [Google Scholar]
- SGR-Axio Space GNSS Receiver. Available online: https://satsearch.co/products/sstl-sgr-axio-space-gnss-receiver (accessed on 23 July 2023).
- SGR-Ligo Space GNSS Receiver. Available online: https://satsearch.co/products/sstl-sgr-ligo-space-gnss-receiver (accessed on 23 July 2023).
- NGPS-03-422 GPS Receiver. Available online: https://satsearch.co/products/newspace-systems-ngps-03-422-gps-receiver (accessed on 23 July 2023).
- 12MM X 16MM Raw Measurement GNSS Receiver for Leo Applications. Available online: https://navspark2.rssing.com/chan-62628515/article156-live.html (accessed on 24 August 2023).
- GS50 GNSS Receiver. Available online: https://satsearch.co/products/gnssmart-gs50-gnss-receiver (accessed on 23 July 2023).
- GSD700 GNSS Receiver. Available online: https://satsearch.co/products/gnssmart-gsd700-gnss-receiver (accessed on 23 July 2023).
- COSGNSS. Available online: https://satsearch.co/products/cosats-cosgnss-receiver (accessed on 3 July 2023).
- ACC-GPS-NANO-DR Dual Redundant GPS SBAS Receiver. Available online: https://satsearch.co/products/accord-software-systems-acc-gps-nano-dr-dual-redundant-gps-sbas-receiver (accessed on 23 July 2023).
- ACC-GPS-NANO-NR. Available online: https://satsearch.co/products/accord-software-systems-acc-gps-nano-nr; (accessed on 23 July 2023).
- ACC-GPS-NavIC-NANO. Available online: https://satsearch.co/products/accord-software-systems-acc-gps-navic-nano (accessed on 23 July 2023).
- ACC-GPS-Nano. Available online: https://satsearch.co/products/accord-software-systems-acc-gps-nano (accessed on 17 August 2023).
- GPS Receiver. Available online: https://satsearch.co/products/warpspace-gps-receiver (accessed on 23 July 2023).
- GPS-aided GEO Augmented Navigation. Available online: https://en.wikipedia.org/wiki/GPS-aided_GEO_augmented_navigation (accessed on 17 August 2023).
- Javad TR-G2T. Available online: https://download.javad.com/sheets/TR-G2T_Rev.5_Datasheet.pdf (accessed on 19 August 2023).
- JAVAD TR-3N. Available online: https://www.javad.com/product/tr-3n/ (accessed on 24 July 2023).
- JAVAD TR-3S. Available online: https://www.javad.com/product/tr-3s/ (accessed on 24 July 2023).
- JAVAD TR-2S. Available online: https://www.javad.com/product/tr-2s/ (accessed on 24 July 2023).
- JAVAD TRE-3S. Available online: https://www.javad.com/product/tre-3s/ (accessed on 24 July 2023).
- JAVAD TRE-Duo. Available online: https://www.javad.com/product/tre-duo/ (accessed on 24 July 2023).
- JAVAD TRE-Quattro. Available online: https://www.javad.com/product/tre-quattro/ (accessed on 24 July 2023).
- JAVAD-Quattro-R. Available online: https://www.javad.com/jgnss/products/oem/Quattro-R/specifications.html (accessed on 19 August 2023).
- OEM7500. Available online: https://novatel.com/products/receivers/gnss-gps-receiver-boards/oem7500 (accessed on 24 July 2023).
- Receivers OEM7600. Available online: https://satsearch.co/products/novatel-receivers-oem7600 (accessed on 24 July 2023).
- OEM7700. Available online: https://novatel.com/products/receivers/gnss-gps-receiver-boards/oem7700 (accessed on 24 July 2023).
- OEM7720. Available online: https://novatel.com/products/receivers/gnss-gps-receiver-boards/oem7720 (accessed on 24 July 2023).
- OEM729. Available online: https://novatel.com/products/receivers/gnss-gps-receiver-boards/oem729 (accessed on 24 July 2023).
- simpleRTK2B. Available online: https://www.ardusimple.com/simplertk2b-receivers/ (accessed on 24 July 2023).
- simpleRTK3B. Available online: https://www.ardusimple.com/simplertk3b-receivers/ (accessed on 24 July 2023).
- mosaic-X5. Available online: https://www.septentrio.com/en/products/gps/gnss-receiver-modules/mosaic-x5 (accessed on 24 July 2023).
- PolaRx2e@/PolaRx2eH. Available online: https://www.eng.auburn.edu/~dmbevly/mech4420/PolaRx2e@_datasheet.pdf (accessed on 24 July 2023).
- ZED-F9P-04B. Available online: https://content.u-blox.com/sites/default/files/ZED-F9P-04B_DataSheet_UBX-21044850.pdf (accessed on 24 July 2023).
- MAX-M8Q. Available online: https://satsearch.co/products/u-blox-ag-max-m8q (accessed on 24 July 2023).
- MAX-M8W. Available online: https://satsearch.co/products/u-blox-ag-max-m8w (accessed on 24 July 2023).
- MAX-M8C. Available online: https://satsearch.co/products/u-blox-ag-max-m8c (accessed on 24 July 2023).
- NEO-M8Q-01A. Available online: https://satsearch.co/products/u-blox-ag-neo-m8q-01a (accessed on 24 July 2023).
- piNAV-NG. Available online: https://www.satcatalog.com/component/pinav-ng/ (accessed on 24 July 2023).
- QinetiQ Q20. Available online: https://docs.rs-online.com/79a8/0900766b80855fa5.pdf (accessed on 24 July 2023).
- NTL102.SMT. Available online: https://ntlab.lt/wp-content/uploads/2022/03/NTL102.SMT-OVERVIEW-03.pdf (accessed on 24 July 2023).
- NTL103 SMT OEM GNSS Module. Available online: https://ntlab.lt/product/gnss-receiver-module-ntl103-smt/ (accessed on 24 July 2023).
- NTL104 SMT OEM GNSS Module. Available online: https://ntlab.lt/product/gnss-receiver-module-ntl104-smt/ (accessed on 24 July 2023).
- NTL106 SMT OEM GNSS Module. Available online: https://ntlab.lt/product/gnss-receiver-module-ntl106-smt/ (accessed on 24 July 2023).
- GNSS/GPS. Available online: https://www.st.com/en/applications/connectivity/gnss-gps.html# (accessed on 24 July 2023).
- S1216F8-GI3. Available online: https://www.skytraq.com.tw/homesite/S1216F8-GI3-PB_v2.pdf (accessed on 24 July 2023).
- S1216 Family GNSS Module Data Sheet. Available online: https://www.skytraq.com.tw/datasheet/S1216V8_v0.9.pdf (accessed on 24 July 2023).
- PX1122R. Available online: https://www.skytraq.com.tw/homesite/PX1122R_PB.PDF (accessed on 24 July 2023).
- Venus 816. Available online: https://www.skytraq.com.tw/homesite/Venus816_PB_v1.pdf (accessed on 24 July 2023).
- Venus 828F. Available online: https://www.skytraq.com.tw/homesite/Venus828F_PB_v1.pdf (accessed on 24 July 2023).
- Venus 838FLPx. Available online: https://www.skytraq.com.tw/homesite/Venus838FLPx_PB_v1.pdf (accessed on 24 July 2023).
- NanoSense GPS Kits. Available online: https://gomspace.com/UserFiles/Subsystems/datasheet/gs-ds-nanosense-gpskit-(1).pdf (accessed on 24 July 2023).
- SoftSpot™—Real-Time Software GNSS Receiver. Available online: https://satsearch.co/products/syntony-softspot-real-time-software-gnss-receiver (accessed on 24 July 2023).






| Area | Criteria | Relevance |
|---|---|---|
| Performance | Position accuracy | Key criteria without postprocessing |
| Performance | Velocity accuracy | May impact prediction performance |
| Performance | Time-To-First-Fix (TTFF) | Time-critical and robust operations |
| Architecture | Frequencies | High-accuracy science applications |
| Architecture | Channels | Quality and robust operations |
| Architecture | Antennas | Science or ADCS 1 requirements |
| Data and I/O 2 | Raw data | Data postprocessing |
| Data and I/O | PPS 3 | Payload or onboard time tagging |
| Data and I/O | Update rate | Temporal resolution |
| Operations | Initialization | Effort of operations |
| Physical | Form factor | Physical spacecraft constraints |
| Physical | Mass | Subsystem budgets and launch cost |
| Physical | Power | EPS 4 subsystem budget |
| Physical | Radiation tolerance | Robustness and longevity |
| Programmatic | Cost | Test effort and mission cost |
| Programmatic | Legal and regulatory | Specific to country of origin |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gill, E.; Morton, J.; Axelrad, P.; Akos, D.M.; Centrella, M.; Speretta, S. Overview of Space-Capable Global Navigation Satellite Systems Receivers: Heritage, Status and the Trend towards Miniaturization. Sensors 2023, 23, 7648. https://doi.org/10.3390/s23177648
Gill E, Morton J, Axelrad P, Akos DM, Centrella M, Speretta S. Overview of Space-Capable Global Navigation Satellite Systems Receivers: Heritage, Status and the Trend towards Miniaturization. Sensors. 2023; 23(17):7648. https://doi.org/10.3390/s23177648
Chicago/Turabian StyleGill, Eberhard, Jade Morton, Penina Axelrad, Dennis M. Akos, Marianna Centrella, and Stefano Speretta. 2023. "Overview of Space-Capable Global Navigation Satellite Systems Receivers: Heritage, Status and the Trend towards Miniaturization" Sensors 23, no. 17: 7648. https://doi.org/10.3390/s23177648
APA StyleGill, E., Morton, J., Axelrad, P., Akos, D. M., Centrella, M., & Speretta, S. (2023). Overview of Space-Capable Global Navigation Satellite Systems Receivers: Heritage, Status and the Trend towards Miniaturization. Sensors, 23(17), 7648. https://doi.org/10.3390/s23177648