Combined Longitudinal and Surface Acoustic Wave Analysis for Determining Small Filling Levels in Curved Steel Containers


Abstract
:1. Introduction
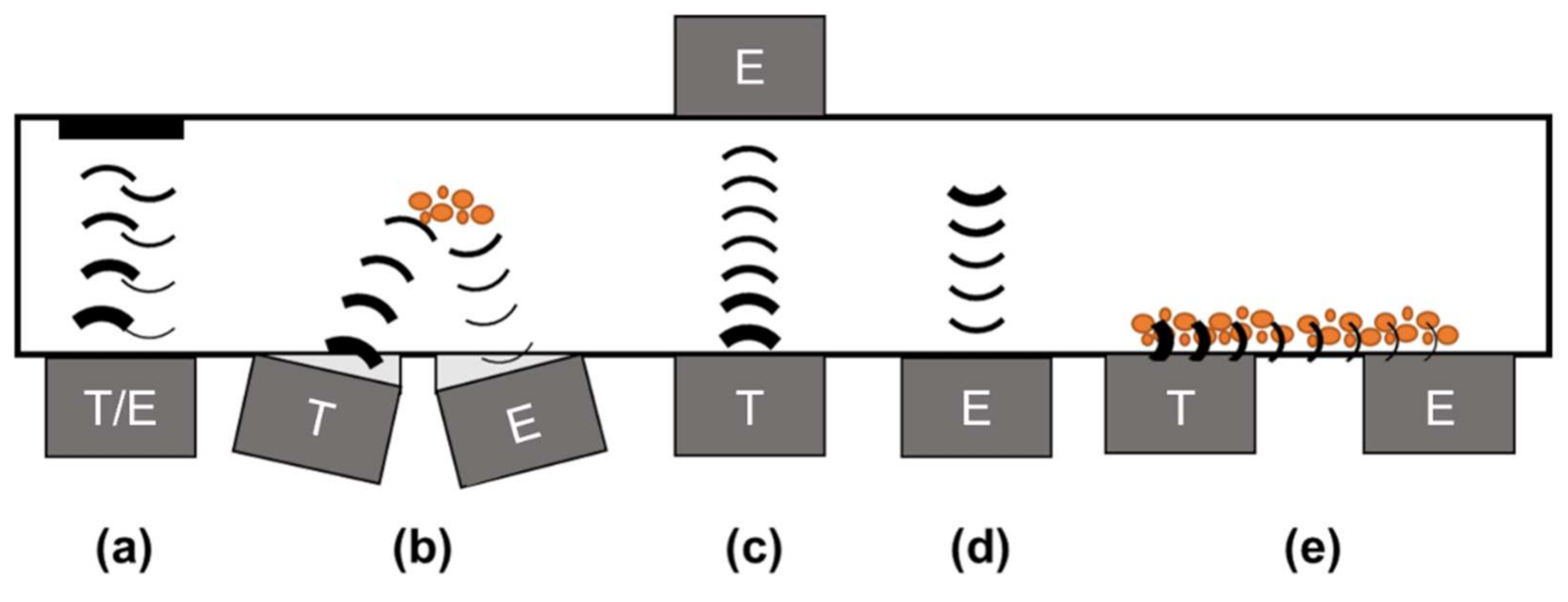
- Longitudinal waves (LW): With LW, the direction of oscillation of the individual particles is identical to the sound wave’s propagation direction. During wave propagation, compression and decompression areas are formed. LW propagate in gases, liquids and solids.
- Transverse waves (TW): In TW, the particle motion is perpendicular to the wave propagation. In contrast to LW, the speed of sound is significantly reduced. TW can only form in media with shear modulus, mainly solids.
- Surface acoustic waves (SAW): SAW consist of a combination of longitudinal and TW and propagate particularly at the interfaces between the phases of solid/liquid and solid/gaseous. The sound velocity of SAW is comparable to that of TW.
2. Materials and Methods
2.1. Experimental Setup
2.2. Experimental Work
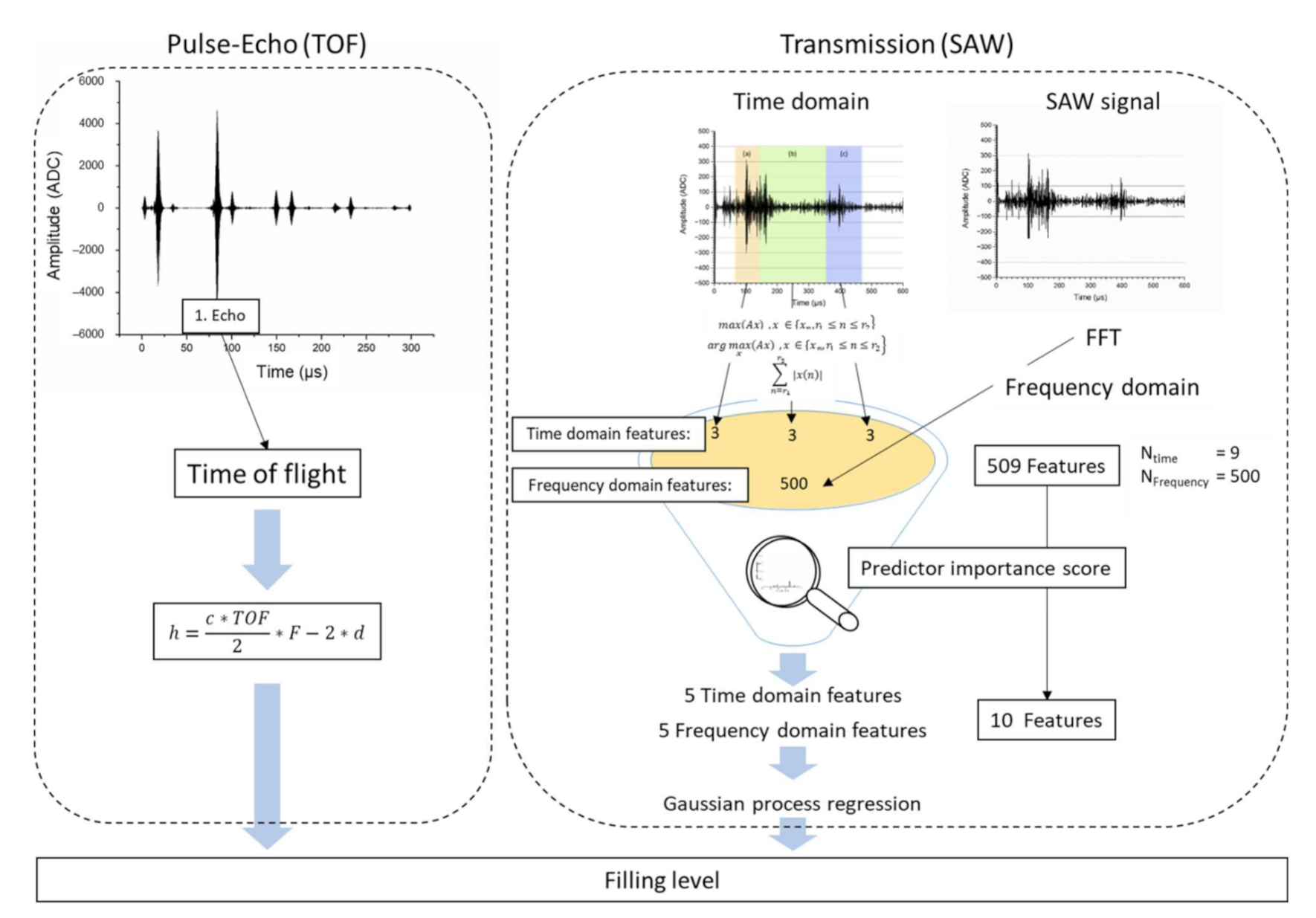
2.3. Ultrasound Signal Processing
3. Results and Discussion
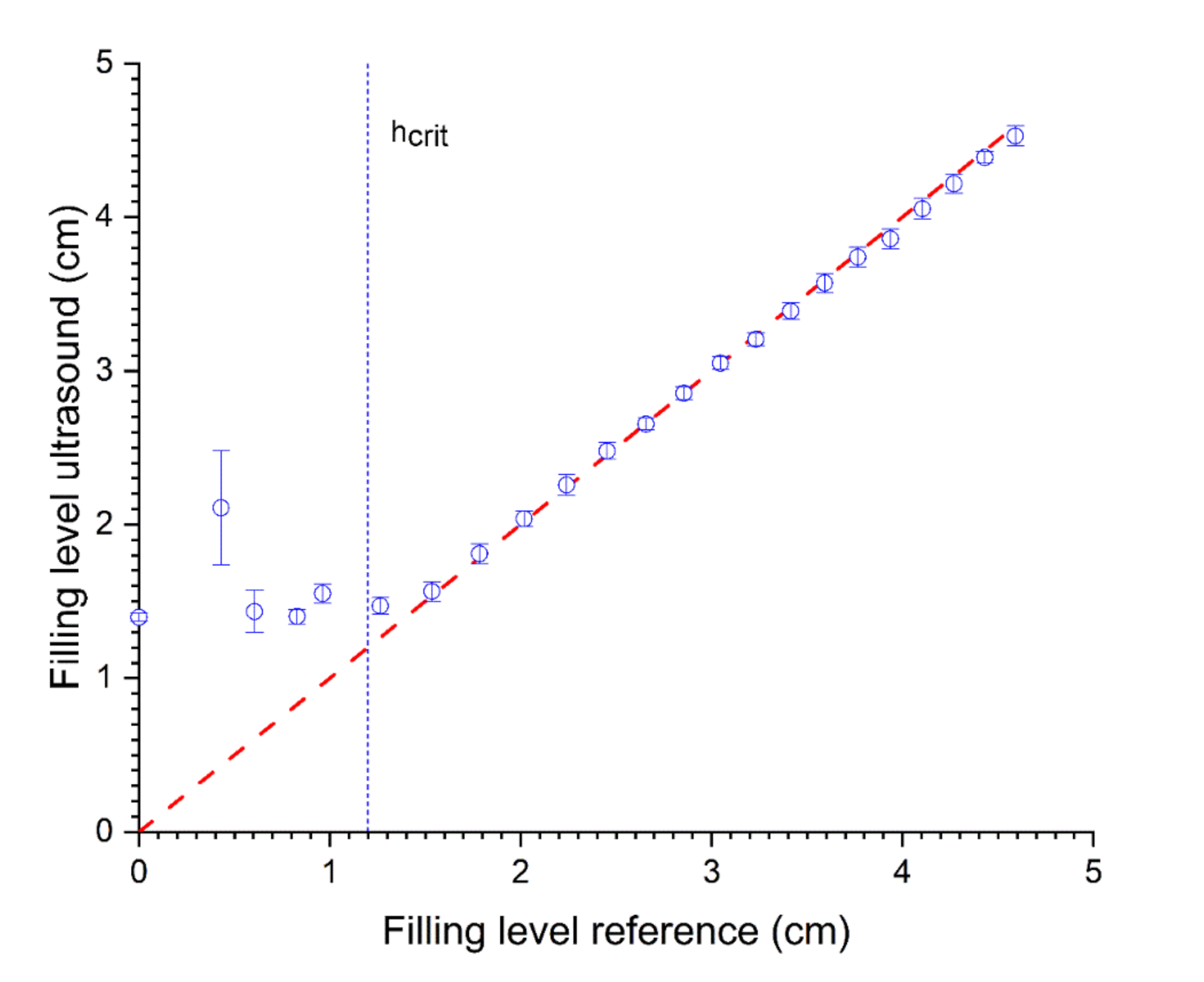
3.1. TOF Measurement
3.2. SAW Measurement
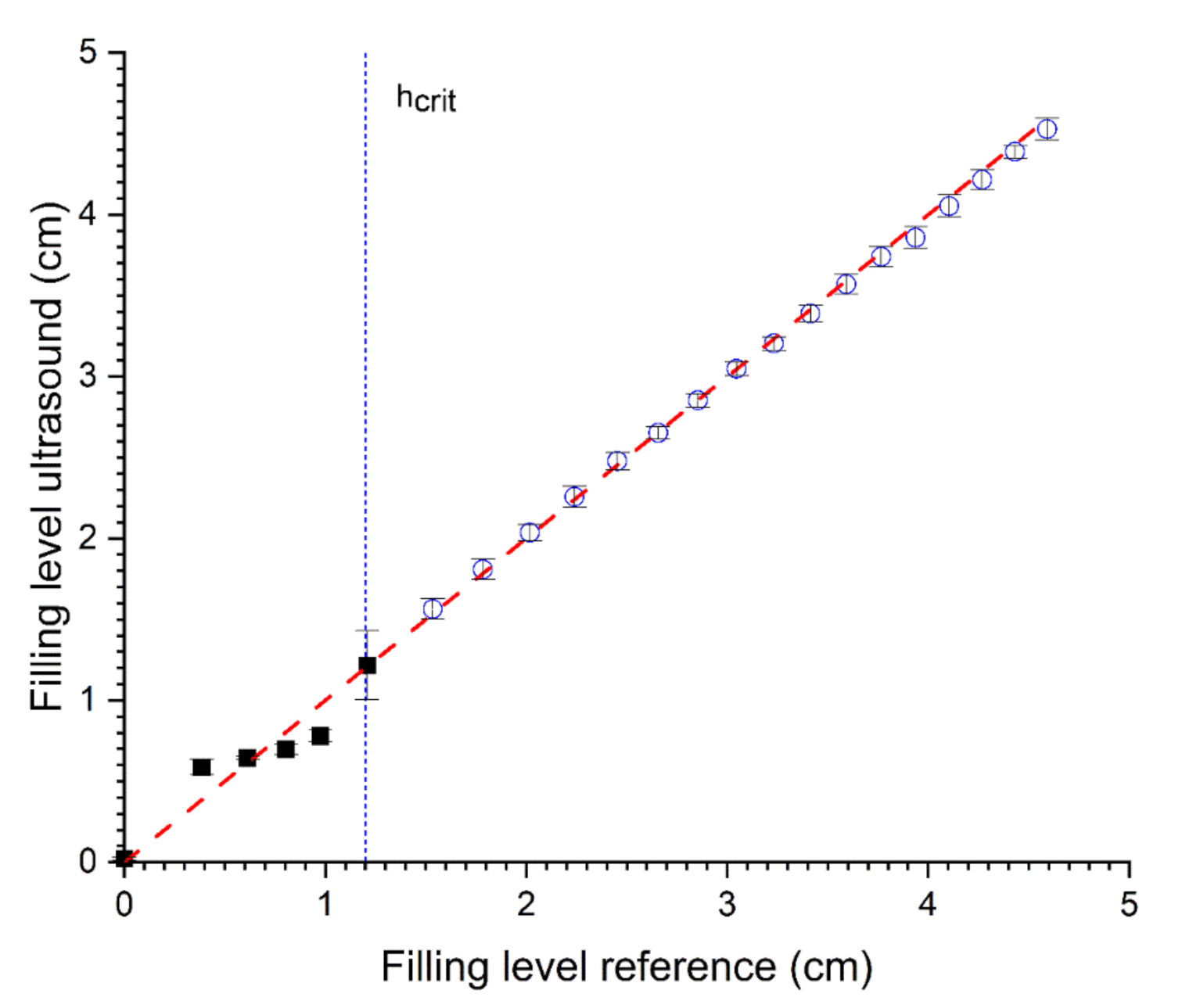
3.3. Combined Measurement
4. Conclusions and Future Scope
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, L.D.; Xu, E.L.; Li, L. Industry 4.0: State of the art and future trends. Int. J. Prod. Res. 2018, 56, 2941–2962. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y. Industry 4.0: A survey on technologies, applications and open research issues. J. Ind. Inf. Integr. 2017, 6, 1–10. [Google Scholar] [CrossRef]
- Zhou, K.; Liu, T.; Zhou, L. Industry 4.0: Towards future industrial opportunities and challenges. In Proceedings of the 12th International Conference on Fuzzy Systems and Knowledge Discovery, FSKD. In Proceedings of the 12th International Conference on Fuzzy Systems and Knowledge Discovery, Zhangjiajie, China, 15–17 August 2015; Tang, Z., Ed.; IEEE: Piscataway, NJ, USA, 2015; pp. 2147–2152, ISBN 978-1-4673-7682-2. [Google Scholar]
- Shaukat, N. PLC based automatic liquid filling process. In Proceedings of the INMIC 2002, International Multi Topic Conference, Karachi, Pakistan, 27–28 December 2002; INMIC: Karachi, Pakistan; IEEE: Piscataway, NJ, USA, 2002; p. 39. [Google Scholar]
- Fowles, G. Flow, Level and Pressure Measurement in the Water Industry; Butterworth-Heinemann: Oxford, UK, 1993; ISBN 0750610476. [Google Scholar]
- Loizou, K.; Koutroulis, E. Water level sensing: State of the art review and performance evaluation of a low-cost measurement system. Measurement 2016, 89, 204–214. [Google Scholar] [CrossRef]
- Lucklum, F.; Jakoby, B. Principle of a non-contact liquid level sensor using electromagnetic-acoustic resonators. E I Elektrotechnik Und Inf. 2009, 126, 3–7. [Google Scholar] [CrossRef]
- Henning, B.; Rautenberg, J. Process monitoring using ultrasonic sensor systems. Ultrasonics 2006, 44 (Suppl. 1), e1395–e1399. [Google Scholar] [CrossRef] [PubMed]
- Beugholt, A.; Metzenmacher, M.; Geier, D.; Becker, T. Ultraschall—Eine nichtinvasive Online-Messtechnik; Der Weihenstephaner: Freising, Germany, 2019; pp. 118–120. [Google Scholar]
- Kotzé, R.; Haldenwang, R.; Fester, V.; Rössle, W. In-line rheological characterisation of wastewater sludges using non-invasive ultrasound sensor technology. Water SA 2015, 41, 683. [Google Scholar] [CrossRef] [Green Version]
- Stelzer, T.; Pertig, D.; Ulrich, J. Ultrasonic crystallization monitoring technique for simultaneous in-line measurement of liquid and solid phase. J. Cryst. Growth 2013, 362, 71–76. [Google Scholar] [CrossRef]
- Bloch, D.; Bröge, P.; Pauer, W. Inline Turbidity Measurements of Batch Emulsion Polymerization. Macromol. React. Eng. 2017, 11. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Hussein, M.; Becker, T. Determination of bubble size distribution in gas-liquid two-phase systems via an ultrasound-based method. Eng. Life Sci. 2017, 17, 653–663. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hoche, S.; Hussein, M.A.; Becker, T. Ultrasound-based density determination via buffer rod techniques: A review. J. Sens. Sens. Syst. 2013, 2, 103–125. [Google Scholar] [CrossRef] [Green Version]
- Hoche, S.; Hussein, M.; Becker, T. Density, ultrasound velocity, acoustic impedance, reflection and absorption coefficient determination of liquids via multiple reflection method. Ultrasonics 2015, 57, 65–71. [Google Scholar] [CrossRef] [PubMed]
- Hauptmann, P.; Hoppe, N.; Puettmer, A. Ultrasonic sensors for process industry. In Proceedings of the IEEE Ultrasonics Symposium, Proceedings: An International Symposium, Atlanta, GA, USA, 7–10 October 2001; Yuhas, D.E., Schneider, S.C., Eds.; IEEE: Piscataway, NJ, USA, 2001; pp. 369–378, ISBN 0-7803-7177-1. [Google Scholar]
- Chen, Q.X.; Payne, P. Industrial applications of piezoelectric polymer transducers. Meas. Sci. Technol. 1995, 6, 249–267. [Google Scholar] [CrossRef]
- Lempriere, B.M. Introduction. In Ultrasound and Elastic Waves: Frequently Asked Questions; Lempriere, B.M., Ed.; Academic Press: Amsterdam, The Netherlands, 2002; pp. 1–8. ISBN 9780124433458. [Google Scholar]
- Lindner, G. Sensors and actuators based on surface acoustic waves propagating along solid–liquid interfaces. J. Phys. D Appl. Phys. 2008, 41, 123002. [Google Scholar] [CrossRef]
- Szabo, T.L.; Wu, J. A model for longitudinal and shear wave propagation in viscoelastic media. J. Acoust. Soc. Am. 2000, 107, 2437–2446. [Google Scholar] [CrossRef]
- Griffin, S.; Hull, J.; Lai, E. Development of a novel ultrasound monitoring system for container filling operations. J. Mater. Process. Technol. 2001, 109, 72–77. [Google Scholar] [CrossRef]
- Mohammed, S.L.; Al-Naji, A.; Farjo, M.M.; Chahl, J. Highly Accurate Water Level Measurement System Using a Microcontroller and an Ultrasonic Sensor. IOP Conf. Ser. Mater. Sci. Eng. 2019, 518, 042025. [Google Scholar] [CrossRef]
- Gao, W.; Liu, W.; Hu, Y.; Wang, J. Study of Ultrasonic Near-Field Region in Ultrasonic Liquid-Level Monitoring System. Micromachines 2020, 11, 763. [Google Scholar] [CrossRef]
- Zakaria, Z.; Idroas, M.; Samsuri, A.; Adam, A.A. Ultrasonic instrumentation system for Liquefied Petroleum Gas level monitoring. J. Nat. Gas Sci. Eng. 2017, 45, 428–435. [Google Scholar] [CrossRef]
- Zhang, B.; Wei, Y.-J.; Liu, W.-Y.; Zhang, Y.-J.; Yao, Z.; Zhao, L.-H.; Xiong, J.-J. A Liquid Level Measurement Technique Outside a Sealed Metal Container Based on Ultrasonic Impedance and Echo Energy. Sensors 2017, 17, 185. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zhang, B.; Zhang, L.; Li, Y.; Gao, X.; Liu, Z. Liquid Level Measurement Model Outside of Closed Containers Based on Continuous Sound Wave Amplitude. Sensors 2018, 18, 2516. [Google Scholar] [CrossRef] [Green Version]
- Richter, W. Nicht-Invasive Inhaltsmessung in Drucktanks; Brauwelt: Nürnberg, Germany, 2016; pp. 1483–1485. [Google Scholar]
- Richter, W. Was Ist Noch Drin? Verlässliches Volumenmanagement; Brauwelt: Nürnberg, Germany, 2019; Volume 159, pp. 1168–1171. [Google Scholar]
- Raja, N.; Balasubramaniam, K.; Periyannan, S. Ultrasonic waveguide based level measurement using flexural mode F(1,1) in addition to the fundamental modes. Rev. Sci. Instrum. 2019, 90, 045108. [Google Scholar] [CrossRef] [PubMed]
- Dhayalan, R.; Saravanan, S.; Manivannan, S.; Rao, B.P.C. Development of ultrasonic waveguide sensor for liquid level measurement in loop system. Electron. Lett. 2020, 56, 1120–1122. [Google Scholar] [CrossRef]
- Guo, P.; Deng, B.; Lan, X.; Zhang, K.; Li, H.; Tian, Z.; Xu, H. Water Level Sensing in a Steel Vessel Using A0 and Quasi-Scholte Waves. J. Sens. 2017, 2017, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Hastie, T.; Tibshirani, R.; Friedman, J.H. The Elements of Statistical Learning: Data Mining, Inference, and Prediction, 2nd ed.; Corrected at 12th Printing 2017; Springer: New York, NY, USA, 2017; ISBN 9780387848587. [Google Scholar]
- Zhang, N.; Xiong, J.; Zhong, J.; Leatham, K. Gaussian Process Regression Method for Classification for High-Dimensional Data with Limited Samples. In Proceedings of the 8th International Conference on Information Science and Technology, ICIST 2018, Cordoba, Spain, 30 June–6 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 358–363, ISBN 978-1-5386-3782-1. [Google Scholar]
- Beda, M.; Whitehead, I.; Frankl, M.; Herfellner, M.; Geier, D.; Becker, T. Spray Drying of Milk—Ultrasonic Fouling Monitoring; International Dairy Magazine: Bad Breisig, Germany, 2018; pp. 22–24. [Google Scholar]
- Beda, M.; Whitehead, I.; Frankl, M.; Herfellner, M.; Geier, D.; Becker, T. Ultraschallbasierte Fouling-Überwachung Während der Sprühtrocknung; Molkerei-Industrie: Bad Breisig, Germany, 2018; pp. 16–19. [Google Scholar]
- Wallhäußer, E.; Hussein, W.; Hussein, M.; Hinrichs, J.; Becker, T. Detection of dairy fouling: Combining ultrasonic measurements and classification methods. Eng. Life Sci. 2013, 13, 292–301. [Google Scholar] [CrossRef]
- Escrig, J.; Woolley, E.; Rangappa, S.; Simeone, A.; Watson, N. Clean-in-place monitoring of different food fouling materials using ultrasonic measurements. Food Control 2019, 104, 358–366. [Google Scholar] [CrossRef]
- Wallhäußer, E.; Sayed, A.; Nöbel, S.; Hussein, M.A.; Hinrichs, J.; Becker, T. Determination of cleaning end of dairy protein fouling using an online system combining ultrasonic and classification methods. Food Bioprocess Technol. 2013, 7, 506–515. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measuring Method | Parameters | Fields of Application |
|---|---|---|
| Reflection | time of flight | distance, filling level, sound velocity, position, object structure, NDT (non-destructive testing), density, viscosity, concentration, movement, flow velocity |
| frequency | ||
| amplitude | ||
| impedance | ||
| Transmission | time of flight | concentration, particle size distribution in (low attenuation) emulsions and suspensions, sound velocity, flow velocity, density, viscosity, temperature |
| frequency | ||
| amplitude | ||
| Emission | frequency | process control |
| amplitude |
| R2 | RMSE | |||||
|---|---|---|---|---|---|---|
| <hcrit | >hcrit | Full Range | <hcrit | >hcrit | Full Range | |
| TOF | −11.57 | 0.99 | 0.81 | 1.02 | 0.06 | 0.63 |
| SAW | 0.97 | −3.81 | −1.02 | 0.07 | 2.77 | 2.37 |
| Combined | 0.97 | 0.99 | 0.99 | 0.07 | 0.06 | 0.07 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Metzenmacher, M.; Beugholt, A.; Geier, D.; Becker, T. Combined Longitudinal and Surface Acoustic Wave Analysis for Determining Small Filling Levels in Curved Steel Containers. Sensors 2022, 22, 3476. https://doi.org/10.3390/s22093476
Metzenmacher M, Beugholt A, Geier D, Becker T. Combined Longitudinal and Surface Acoustic Wave Analysis for Determining Small Filling Levels in Curved Steel Containers. Sensors. 2022; 22(9):3476. https://doi.org/10.3390/s22093476
Chicago/Turabian StyleMetzenmacher, Michael, Alexander Beugholt, Dominik Geier, and Thomas Becker. 2022. "Combined Longitudinal and Surface Acoustic Wave Analysis for Determining Small Filling Levels in Curved Steel Containers" Sensors 22, no. 9: 3476. https://doi.org/10.3390/s22093476
APA StyleMetzenmacher, M., Beugholt, A., Geier, D., & Becker, T. (2022). Combined Longitudinal and Surface Acoustic Wave Analysis for Determining Small Filling Levels in Curved Steel Containers. Sensors, 22(9), 3476. https://doi.org/10.3390/s22093476