
Passive Attenuation of Mechanical Vibrations with a Superelastic SMA Bending Springs: An Experimental Investigation

 , ,
, , 
Abstract
1. Introduction
2. Materials and Methods
2.1. Design of Bending Spring M-Shape Device
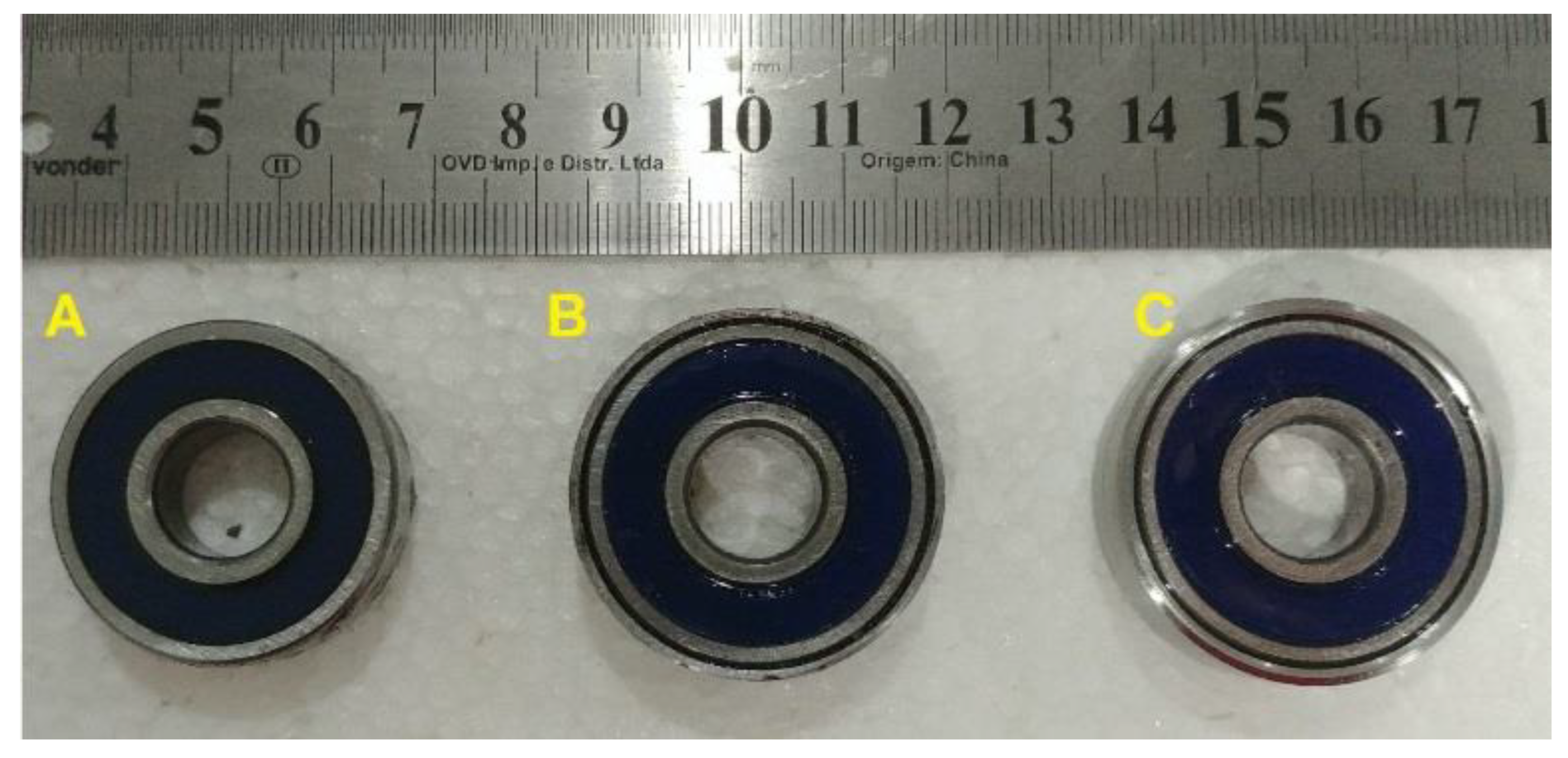
2.2. Fabrication of the M-Shape Device
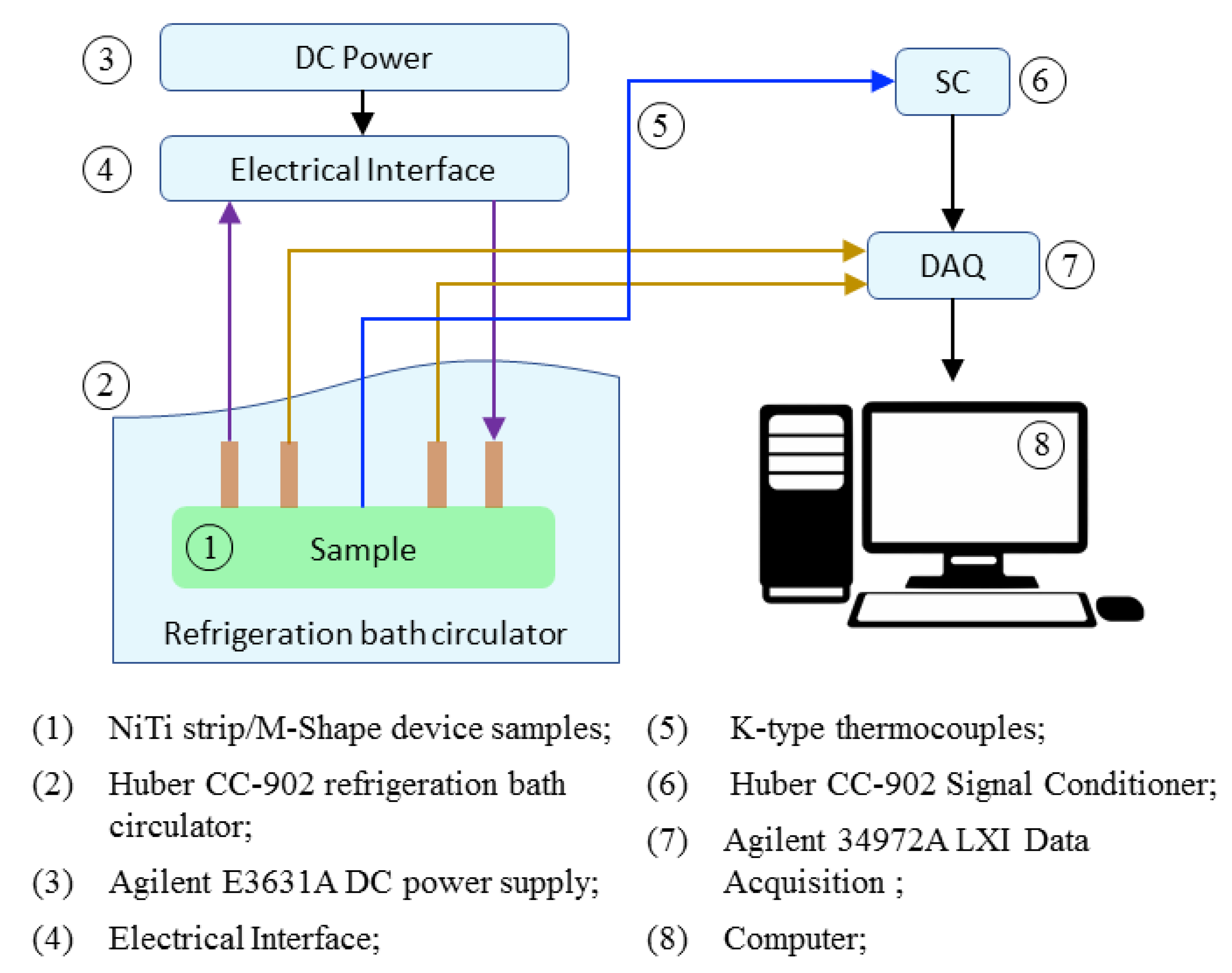
2.3. Steady Experiment with the M-Shape Device
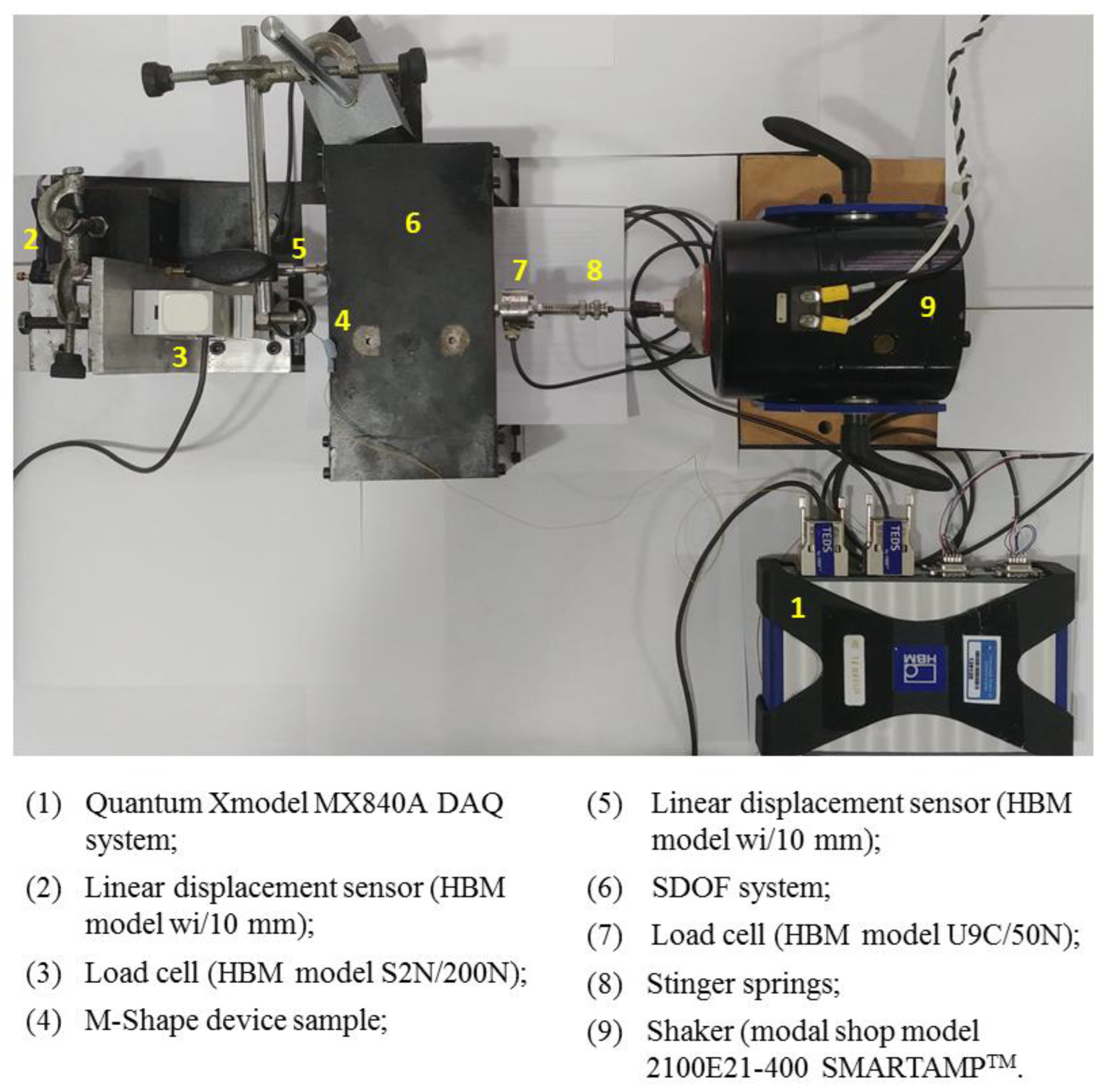
2.4. SEMD (System for Estimation of Material Damping) Experiment
2.5. Dynamic Experiment with the M-Shape Device–MTS
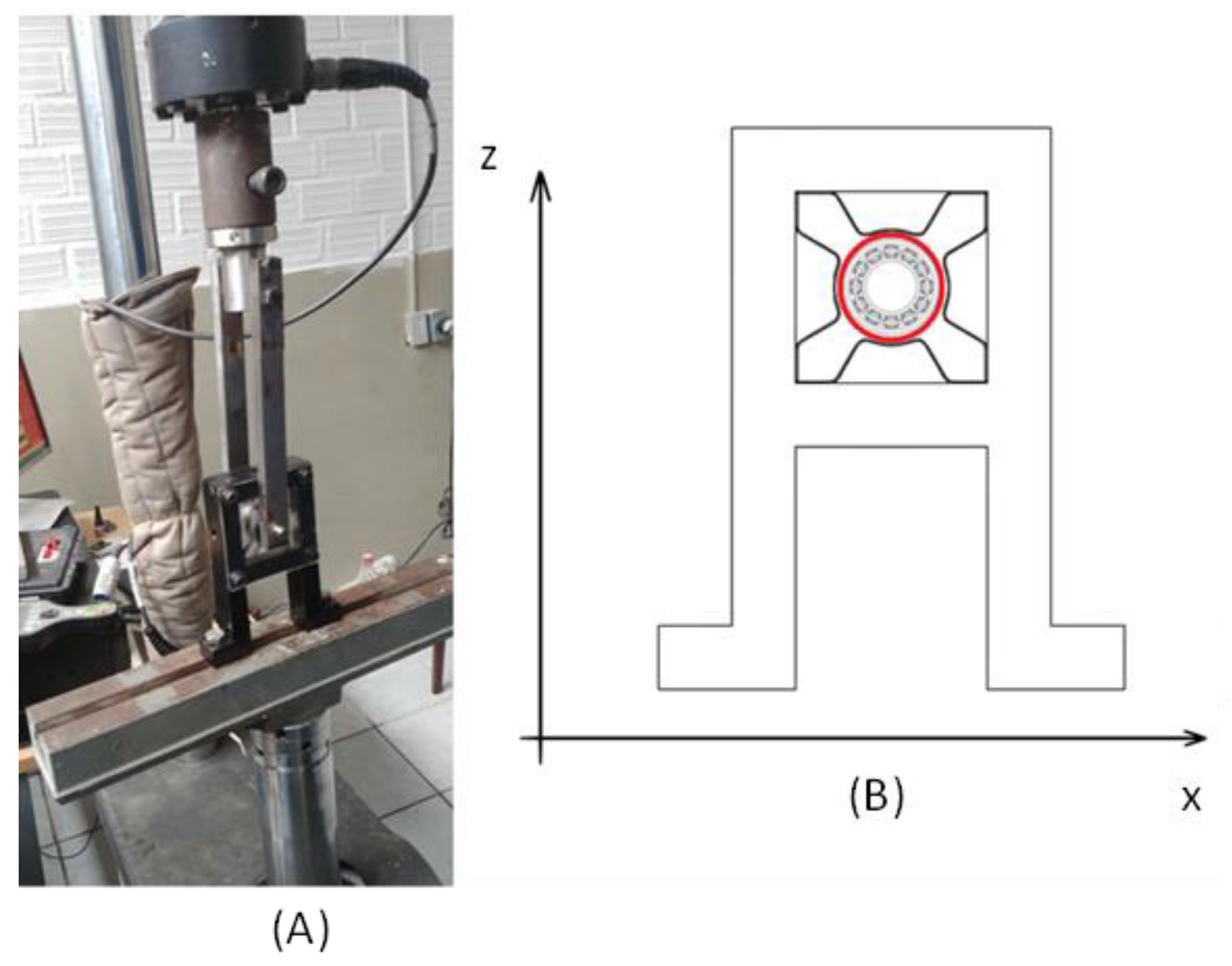
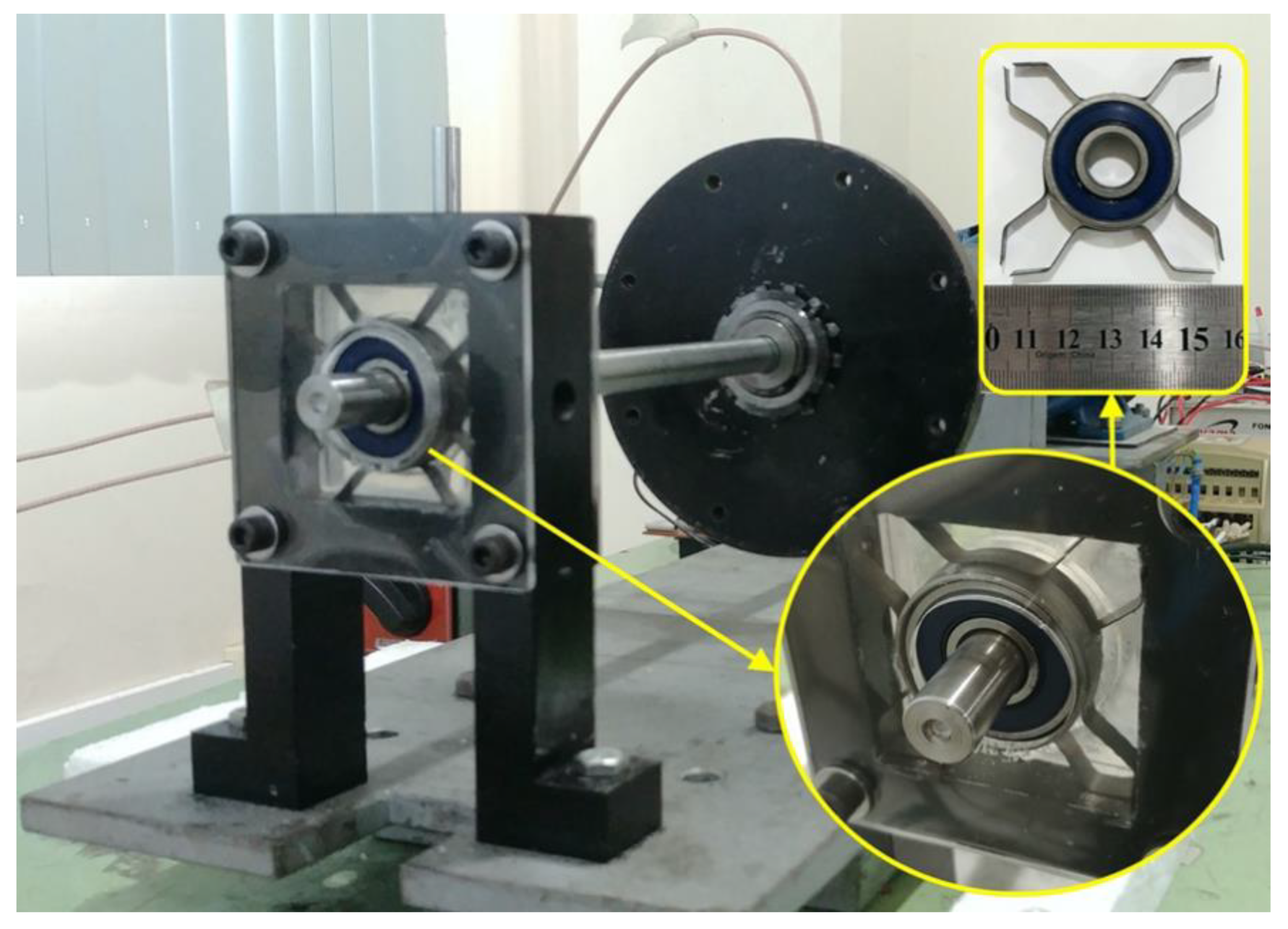
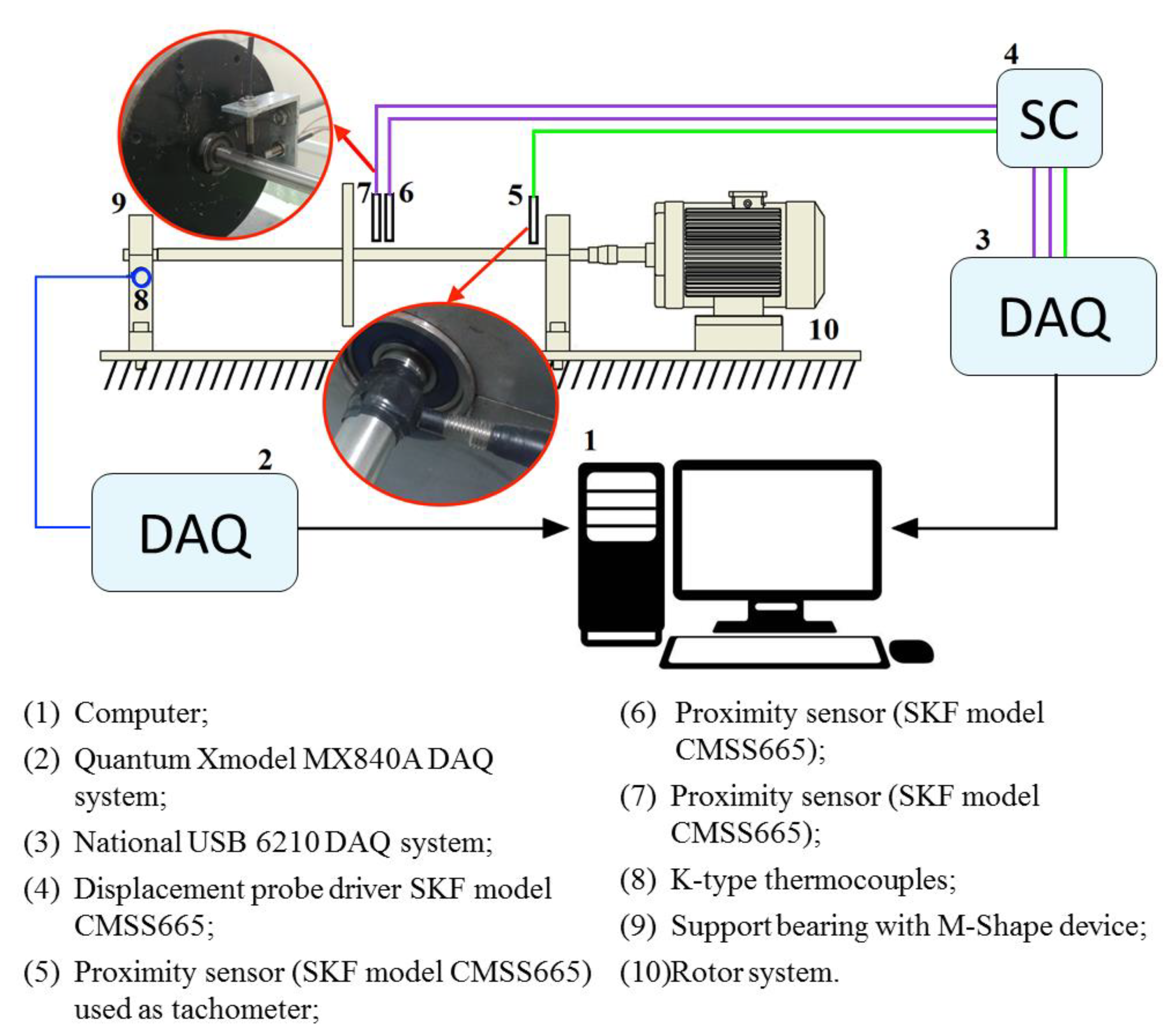
2.6. Rotor System with the M-Shape Device of SMA-SE Applied
3. Results and Discussions
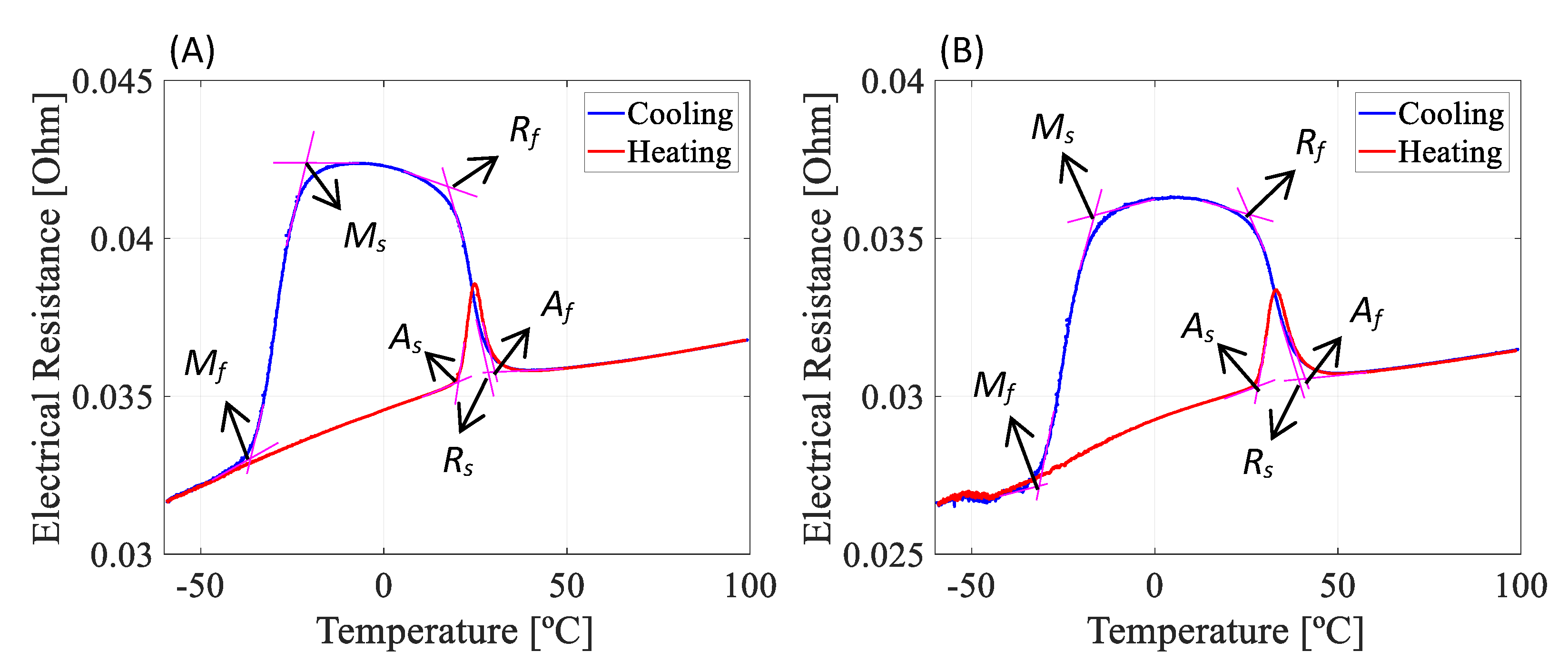
3.1. Bending Spring Characterization
3.2. SEMD Experiment with the M-Shape Device
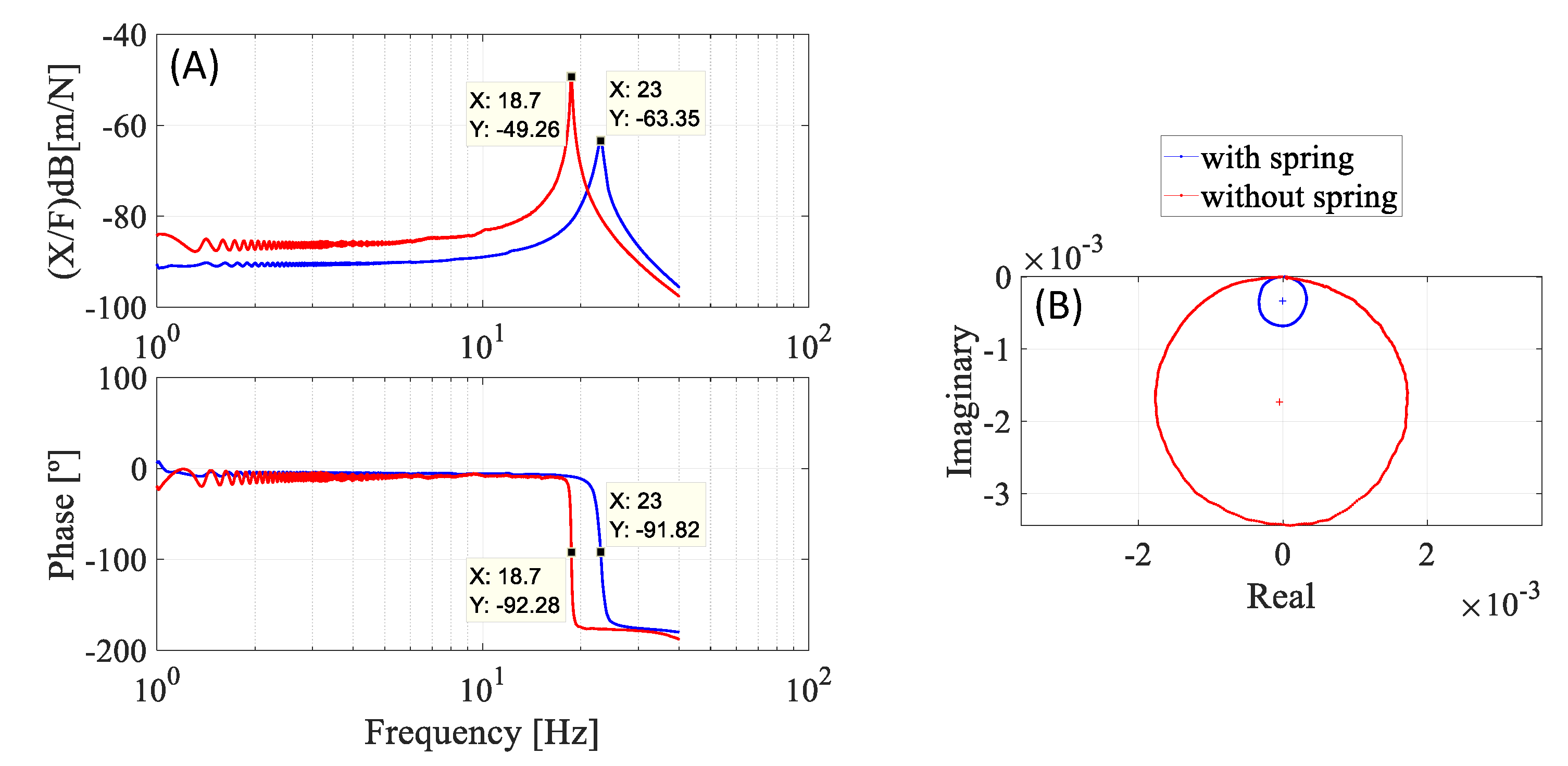
3.3. Dynamic Test with M-Shape Device Applied in the Support Bearing
3.4. The M-Shape Device Applied in the Rotor System Analysis
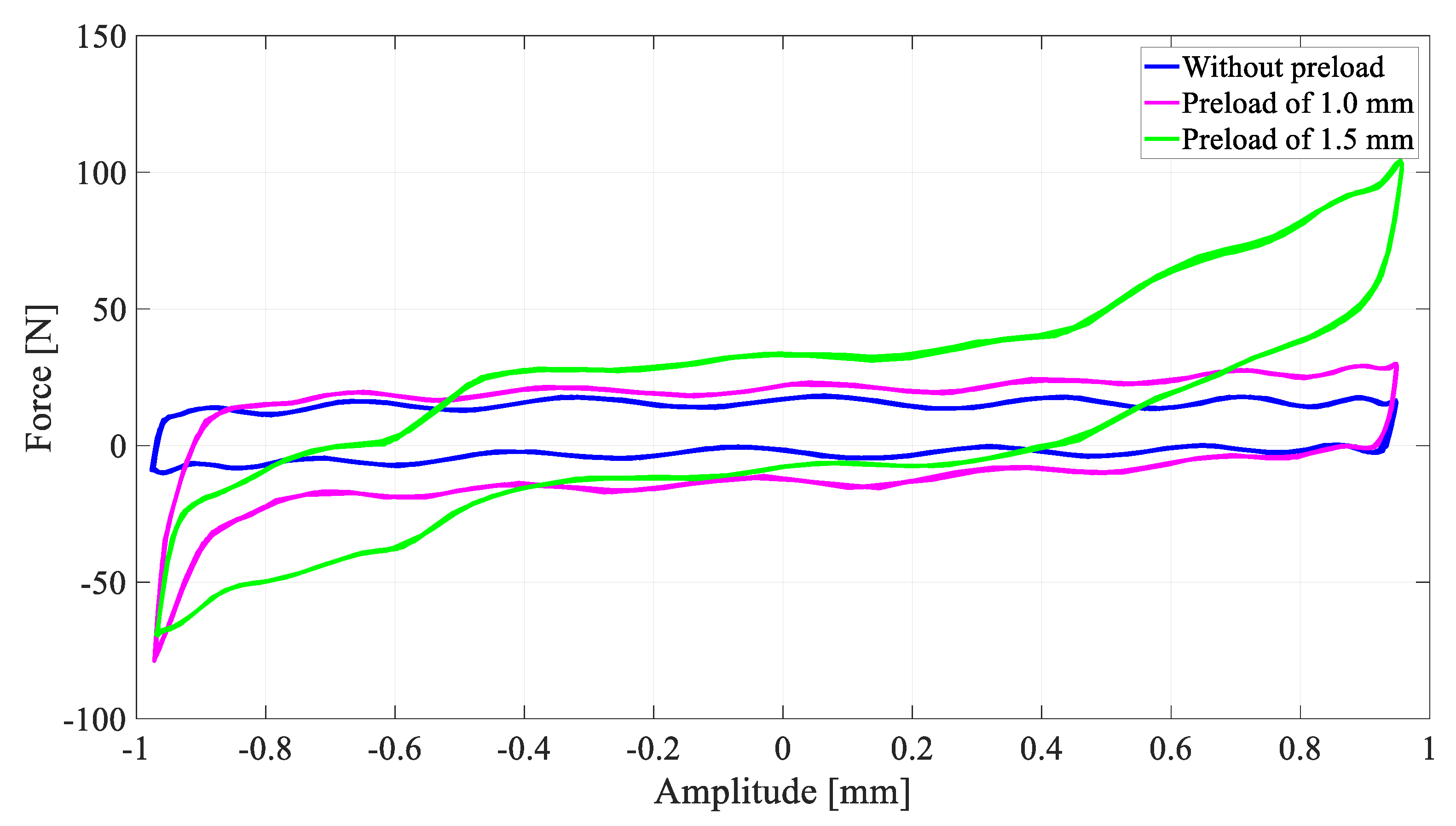
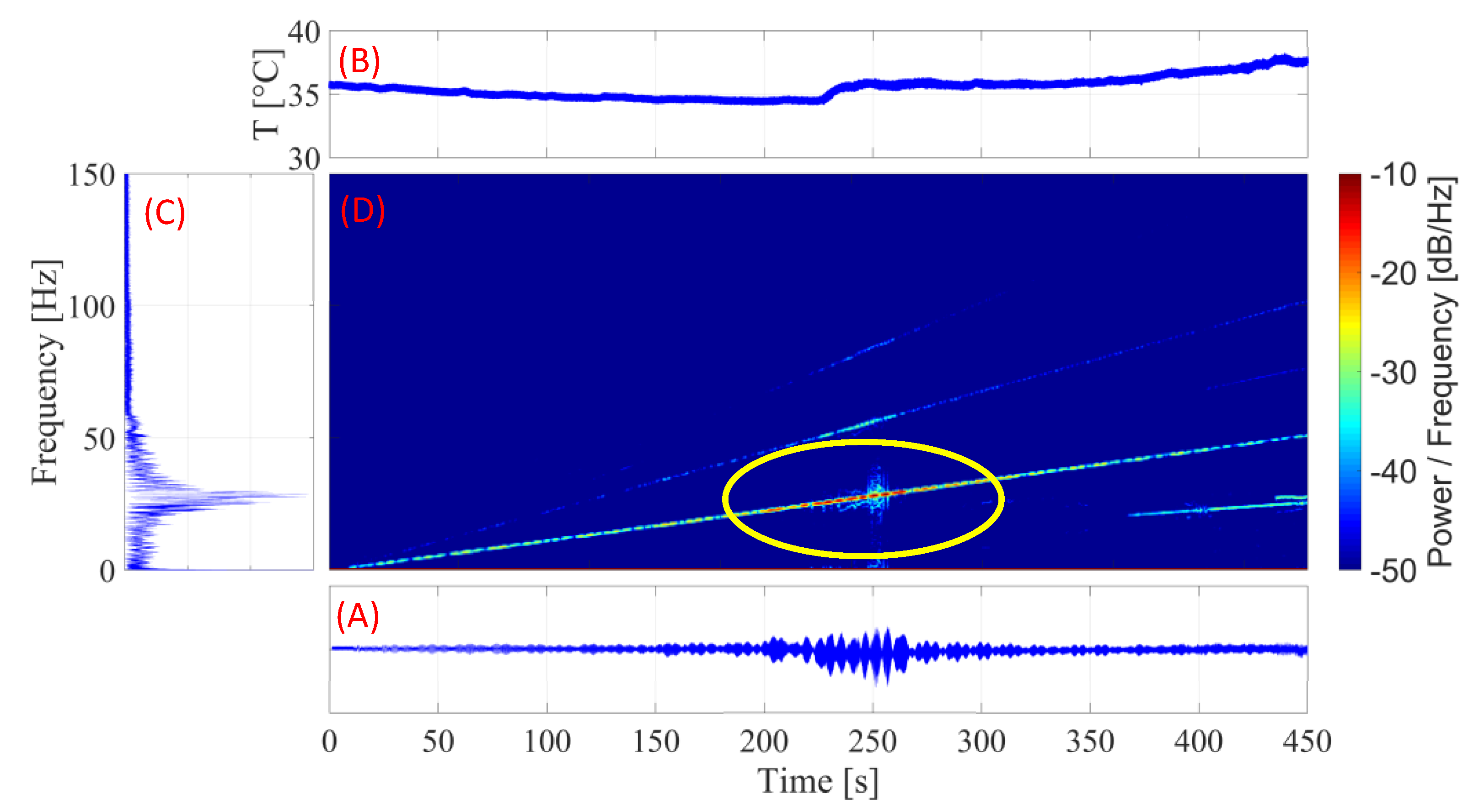
3.4.1. SMA-SE M-Shape Device without Pre-Load
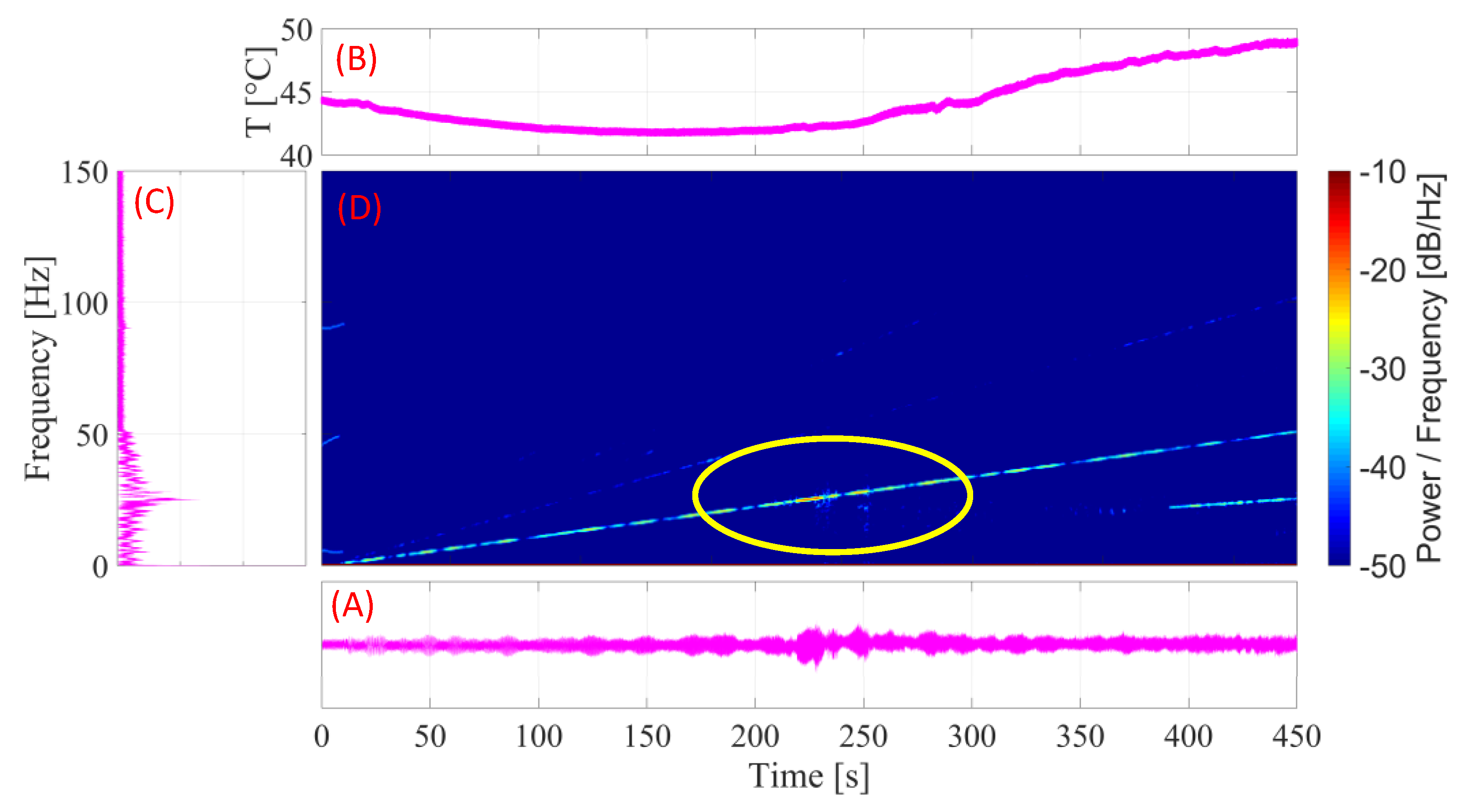
3.4.2. SMA-SE M-Shape Device with Pre-Load of 1.0 mm
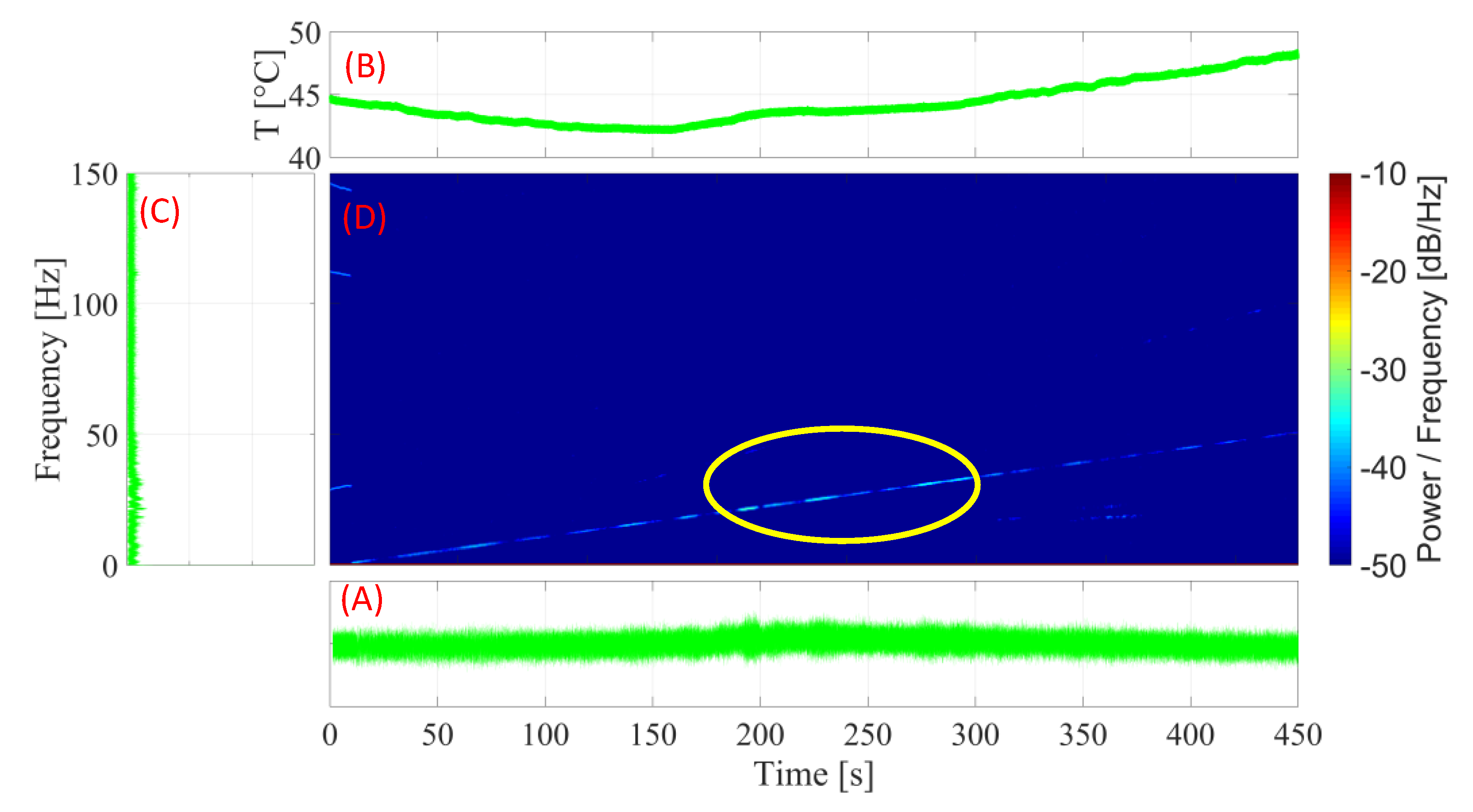
3.4.3. SMA–SE M-Shape Device with Pre-Load of 1.5 mm
4. Conclusions
- (a)
- In the SEMD experiment, proposed by [37], the addition of the M-Shape device of SMA-SE in the SDOF system was able to attenuate the amplitude of the movement by 14 dB. With only 0.048% of the mass of the system, the proposed device added 80% of hysteresis damping, increasing from 289.25 N/m to 1485.7 N/m, demonstrating an excellent damping capability.
- (b)
- In the dynamic experiments, an increase in the preload applied in the device of SMA-SE provoked the enhancement of the damping capacity, corroborating the results seen in the literature.
- (c)
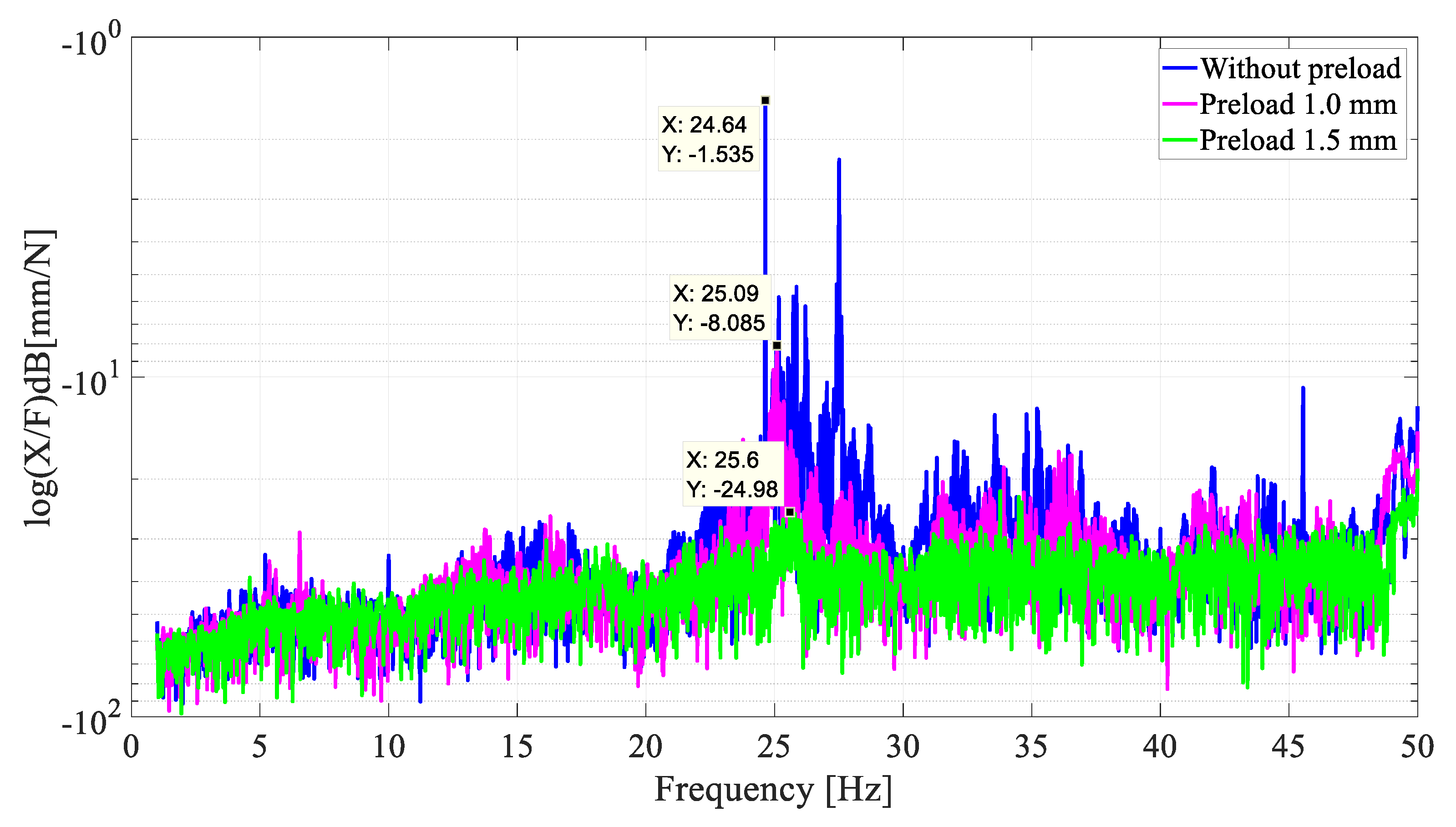
- At a maximum fixed preload (1.5 mm amplitude), the M-Shape device was able to attenuate the vibrations by −23 dB as applied in the rotor system, when compared with the setup without a preload.
- (d)
- The application of superelastic SMA materials in passive control can be effective to achieve better responses of vibration attenuation without reducing the performance of the rotor system, confirming the innovative aspect of the proposed SMA-SE M-Shape device.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Duerig, T.W.; Melton, K.N.; Stöckel, D.; Wayman, C.M. Engineering Aspects of Shape Memory Alloys; Elsevier: Amsterdam, The Netherlands, 1990; ISBN 9780750610094. [Google Scholar]
- Liu, B.; Yan, L.; Li, Q.; Zhu, Z. Vibration Control of a Rotor System Utilizing a Bearing Housing with Controllable Spring Nonlinearity. In Volume 5: Manufacturing Materials and Metallurgy; Ceramics; Structures and Dynamics; Controls, Diagnostics and Instrumentation; Education; General; ASME: The Hague, The Netherlands, 1994; p. 8. [Google Scholar]
- Otsuka, K.; Wayman, C.M. Shape Memory Materials; Cambridge University Press: Cambridge, UK, 1999; ISBN 0521663849. [Google Scholar]
- Lagoudas, D.C. Shape Memory Alloys; Springer: Boston, MA, USA, 2008; Volume 1, ISBN 978-0-387-47684-1. [Google Scholar]
- Bhadeshia, H.K.D.H.; Wayman, C.M. Phase Transformations. In Physical Metallurgy; Elsevier: Amsterdam, The Netherlands, 2014; pp. 1021–1072. [Google Scholar]
- Stoiber, J.; Van Humbeeck, J.; Gotthardt, R. Hysteresis Effects During Martensitic Transformation in Cu-Zn-Al Studied by Internal Friction Measurements. Mater. Sci. Forum 1991, 56–58, 505–510. [Google Scholar] [CrossRef]
- Patoor, E.; Lagoudas, D.C.; Entchev, P.B.; Brinson, L.C.; Gao, X. Shape memory alloys, Part I: General properties and modeling of single crystals. Mech. Mater. 2006, 38, 391–429. [Google Scholar] [CrossRef]
- Holanda, S.A.; Silva, A.A.; De Araújo, C.J.; De Aquino, A.S. Study of the complex stiffness of a vibratory mechanical system with shape memory alloy coil spring actuator. Shock Vib. 2014, 2014, 11. [Google Scholar] [CrossRef]
- Borges, J.M.; Silva, A.A.; de Araújo, C.J.; Pimentel, R.L.; de Aquino, A.S.; Senko, R.; dos Reis, R.P.B. On the active control of a rotor-bearing system using shape memory alloy actuators: An experimental analysis. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 13. [Google Scholar] [CrossRef]
- He, Y.-Y.; Oi, S.; Chu, F.-L.; Li, H.-X. Vibration control of a rotor–bearing system using shape memory alloy: I. Theory. Smart Mater. Struct. 2007, 16, 114–121. [Google Scholar] [CrossRef]
- He, Y.Y.; Oi, S.; Chu, F.L.; Li, H.X. Vibration control of a rotor-bearing system using shape memory alloy: II. Experimental study. Smart Mater. Struct. 2007, 16, 122–127. [Google Scholar] [CrossRef]
- Gupta, K.; Darpe, A.K.; Kumar, B.; Bhatia, A.; Ahmed, S.M.; Aravindhan, T.S.; Nakra, B.C. Resonance control of rotor using shape memory alloys. Adv. Vib. Eng. 2009, 8, 239–246. [Google Scholar]
- Guimarães Oliveira, A.; Almeida Silva, A.; Jose de Araújo, C.; Senko, R.; Pierre B dos Reis, R. Design and experimental analysis of a smart bearing using shape memory alloy springs. J. Intell. Mater. Syst. Struct. 2020, 31, 1390–1402. [Google Scholar] [CrossRef]
- Lees, A.W.; Jama, S.; Inman, D.J.; Cartmell, M.P. The Control Of Bearing Stiffness Using Shape Memory. In Proceedings of the International Symposium on Stability Control of Rotating Machinery, Calgary, AB, Canada, 27–31 August 2007; pp. 299–308. [Google Scholar]
- Nie, J.X.; Yan, X.J. Intelligent Bearing System for Passing through Critical Speed of Aeroengine Rotor by Changing Stiffness Using SMA Wires. Mater. Sci. Forum 2000, 327–328, 99–102. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, Q.; Zhang, D.; Scarpa, F.; Liu, B.; Hong, J. A novel smart rotor support with shape memory alloy metal rubber for high temperatures and variable amplitude vibrations. Smart Mater. Struct. 2014, 23, 125016. [Google Scholar] [CrossRef]
- Silva, L.C.; Savi, M.A.; Paiva, A. Nonlinear dynamics of a rotordynamic nonsmooth shape memory alloy system. J. Sound Vib. 2013, 332, 608–621. [Google Scholar] [CrossRef]
- Enemark, S.; Santos, I.F.; Savi, M.A. Shape memory alloys applied to improve rotor-bearing system dynamics–An experimental investigation. In Proceedings of the XVII International Symposium on Dynamic Problems of Mechanics, Natal, Brazil, 22–27 February 2015; p. 10. [Google Scholar]
- Enemark, S.; Santos, I.F. Rotor-bearing system integrated with shape memory alloy springs for ensuring adaptable dynamics and damping enhancement-Theory and experiment. J. Sound Vib. 2016, 369, 29–49. [Google Scholar] [CrossRef]
- Alves, M.T.S.; Enemark, S.; Steffen, V.J.; Santos, I.F. Vibration control of a flexible beam using shape memory alloy actuators. J. Guid. Control Dyn. 2015, 19, 1178–1180. [Google Scholar] [CrossRef]
- Alves, M.T.S.; Steffen, V.; Castro dos Santos, M.; Savi, M.A.; Enemark, S.; Santos, I.F. Vibration control of a flexible rotor suspended by shape memory alloy wires. J. Intell. Mater. Syst. Struct. 2018, 29, 2309–2323. [Google Scholar] [CrossRef]
- Yogaraju, R.; Ravikumar, L.; Saravanakumar, G.; Shravankumar, C.; Kumar, V.A. Feasibility and Performance Studies of a Semi Active Journal Bearing. Procedia Technol. 2016, 25, 1154–1161. [Google Scholar] [CrossRef][Green Version]
- Braga, M.T.; Alves, M.T.S.; Cavalini, A.A.; Steffen, V. Influence of temperature on the passive control of a rotating machine using wires of shape memory alloy in the suspension. Smart Mater. Struct. 2020, 29, 035040. [Google Scholar] [CrossRef]
- XiaoJun, Y.; JingXu, N. Study of a new application form of shape memory alloy superelasticity. Smart Mater. Struct. 2003, 12, N14. [Google Scholar]
- Senko, R.; Silva, A.A.; Rodrigues, M.C.; Lima, A.G.B.; dos Reis, R.P.B.; Guedes, C.A.L. Numerical and experimental analysis of superelastic SMA bending springs in rotor systems. Mech. Adv. Mater. Struct. 2022, 29, 579–593. [Google Scholar] [CrossRef]
- Senko, R.; Silva, A.A.; Rodrigues, M.C. SMA-Superelastic Blade Spring. BR 10 2018 011093 4, 30 May 2018. [Google Scholar]
- Senko, R. Passive Attenuation of a Rotating System Using Superelastic Blades of SMA, 1st ed.; Editora Ideia: João Pessoa, PB, Brazil, 2018; ISBN 9788546303410. [Google Scholar]
- Macqueron, J.L.; Morin, M.; Guénin, G.; Planes, A.; Elgueta, J.; Castan, T. Atomic Ordering and Martensitic Transition in a Cu-Zn-Al Shape Memory Alloy. Le J. Phys. IV 1991, 1, C4-259–C4-263. [Google Scholar] [CrossRef][Green Version]
- Souza, E.F. Experimental Study of the Thermal and Dynamic Behavior of a Belleville Spring with NiTi Shape Memory Alloy. Bachelor’s Thesis, Federal University of Campina Grande, Campina Grande, PB, Brazil, 2015. [Google Scholar]
- Sashihara, E.M. Production of Ni-Ti Alloy with Shape Memory Eeffect in an Electronic Beam Melting Furnace and Its Characterization. Master’s Thesis, Instituto Tecnológico de Aeronáutica (ITA), São José dos Campos, SP, Brazil, 2007. [Google Scholar]
- Godoi, R.P. Study and Characterization of Nitinol Alloy. Bachelor’s Thesis, Federal Technological University of Paraná, Londrina, PR, Brazil, 2015. [Google Scholar]
- Liu, X.; Wang, Y.; Yang, D.; Qi, M. The effect of ageing treatment on shape-setting and superelasticity of a nitinol stent. Mater. Charact. 2008, 59, 402–406. [Google Scholar] [CrossRef]
- Elahinia, M.H.; Hashemi, M.; Tabesh, M.; Bhaduri, S.B. Manufacturing and processing of NiTi implants: A review. Prog. Mater. Sci. 2012, 57, 911–946. [Google Scholar] [CrossRef]
- Rao, A.; Srinivasa, A.R.; Reddy, J.N. Design of Shape Memory Alloy (SMA) Actuators; SpringerBriefs in Applied Sciences and Technology; Springer International Publishing: Cham, Switzerland, 2015; ISBN 978-3-319-03187-3. [Google Scholar]
- dos Reis, R.P.B. Development of an Equipment for Thermal Characterization of Shape Memory Alloy Actuators Using Thermoelectric Effect. Master’s Thesis, Federal University of Campina Grande, Campina Grande, PB, Brazil, 2010. [Google Scholar]
- Ribeiro, D.J.; da Silva, P.C.S.; de Araujo, C.J.; Marcelino, E.D.T. Conversion of Superelastic NiTi SMA wires in thermomechanical actuators: A study based on heat treatments. In Proceedings of the 24th ABCM International Congress of Mechanical Engineering, Curitiba, PR, Brazil, 3–8 December 2017; p. 10. [Google Scholar]
- dos Reis, R.P.B.; Silva, P.C.S.; Senko, R.; Silva, A.A.; de Araújo, C.J. Methodology for the estimation of material damping as applied to superelastic shape memory alloy mini-springs. Mater. Des. 2019, 161, 124–135. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Ts (mm) | 10% of Thickness (mm) | Tf (mm) |
|---|---|---|---|
| 1 | 0.30 | 0.03 | 0.27 |
| 2 | 0.27 | 0.02 | 0.25 |
| Mass (kg) | ØIn (mm) | ØOut (mm) | Length (mm) | Width (mm) | |
|---|---|---|---|---|---|
| Shaft | 0.4816 | – | 12.50 | 414.00 | – |
| Disc | 1.4335 | 26.00 | 150.00 | – | 11.00 |
| Support Bearing | 2.096 | 37.00 | – | 79.00 | 25.00 |
| Phase Temperature | Ms (°C) | Mf (°C) | Rf (°C) | Rs (°C) | As (°C) | Af (°C) |
|---|---|---|---|---|---|---|
| NiTi Strip–(A) | −35.19 | −23.14 | 19.48 | 28.70 | 20.63 | 30.39 |
| M-Shape of NiTi–(B) | −31.32 | −17.31 | 26.55 | 39.22 | 28.09 | 40.53 |
| A SDOF without M-Shape Device | B SDOF with M-Shape Device | Unit | |
|---|---|---|---|
| hs | 289.25 | 1485.7 | N/m |
| hsma a | - | 1196.45 | N/m |
| Ks | 18,381 | 33,014 | N/m |
| Ksma b | - | 14,633 | N/m |
| ηs | 0.0156 | 0.1313 | - |
| ηsma c | 0.1157 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Senko, R.; Almeida, V.S.; dos Reis, R.P.B.; Oliveira, A.G.; Silva, A.A.; Rodrigues, M.C.; de Carvalho, L.H.; Lima, A.G.B. Passive Attenuation of Mechanical Vibrations with a Superelastic SMA Bending Springs: An Experimental Investigation. Sensors 2022, 22, 3195. https://doi.org/10.3390/s22093195
Senko R, Almeida VS, dos Reis RPB, Oliveira AG, Silva AA, Rodrigues MC, de Carvalho LH, Lima AGB. Passive Attenuation of Mechanical Vibrations with a Superelastic SMA Bending Springs: An Experimental Investigation. Sensors. 2022; 22(9):3195. https://doi.org/10.3390/s22093195
Chicago/Turabian StyleSenko, Richard, Vinícius S. Almeida, Rômulo P. B. dos Reis, Andersson G. Oliveira, Antonio A. Silva, Marcelo C. Rodrigues, Laura H. de Carvalho, and Antonio G. B. Lima. 2022. "Passive Attenuation of Mechanical Vibrations with a Superelastic SMA Bending Springs: An Experimental Investigation" Sensors 22, no. 9: 3195. https://doi.org/10.3390/s22093195
APA StyleSenko, R., Almeida, V. S., dos Reis, R. P. B., Oliveira, A. G., Silva, A. A., Rodrigues, M. C., de Carvalho, L. H., & Lima, A. G. B. (2022). Passive Attenuation of Mechanical Vibrations with a Superelastic SMA Bending Springs: An Experimental Investigation. Sensors, 22(9), 3195. https://doi.org/10.3390/s22093195