1. Introduction
In passive surveillance systems (PSSs), the BPSK signal is a typical radar signal with a low probability of intercept (LPI), and it has been designed for many modern radar systems [
1,
2]. Moreover, these signals are transmitted in a high-noise environment. The interception of LPI signals has been a topic of investigation for over a decade. To detect and estimate the parameters of BPSK signals, the Fourier analysis method using Fast Fourier Transform (FFT) was used as a basic tool [
3]. From this basic tool, more complex methods have evolved, such as the Short-Time Fourier Transform, in order to estimate the signal parameters over time [
4,
5]. Later, more effective techniques have also been designed, such as Time-Frequency Distributions, in order to identify the LPI radar signals. These techniques include the Ville–Wigner Distribution, Cyclo-Stationary, and Wavelet Transform [
6,
7,
8,
9,
10]. These techniques are effective to detect and estimate the parameters of LPI signals with an
. In recent years, new techniques have been developed for analyzing BPSK signals, based on Deep Learning (DL) or Artificial Intelligence (AI), such as the Convolution Neural Network (CNN) and Deep Convolution Neural Network [
11,
12]. These techniques can recognize BPSK signals with an
One disadvantage of these methods is that their accuracy depends on the database or the total number of samples—the fewer the samples, the lower the accuracy.
Subsequently, a new technique was used to estimate the code rate of the BPSK signals, based on the Nyquist Folding Receiver (NYFR), as presented in [
13] or based on a duffing oscillator [
14]. The SNR required to achieve a nearly perfect probability of the correct code-rate estimation (
) is
Another method used to detect BPSK signals is called the Parameter-Adjusted Bistable Stochastic Resonance Model, based on a scale change in [
15]. This method produces the best results (probability of detection:
) for input BPSK signals with an
It shows that all the above-mentioned techniques are capable of detecting and estimating the parameters of BPSK signals in a high-white-noise environment, but they require the database of BPSK signals.
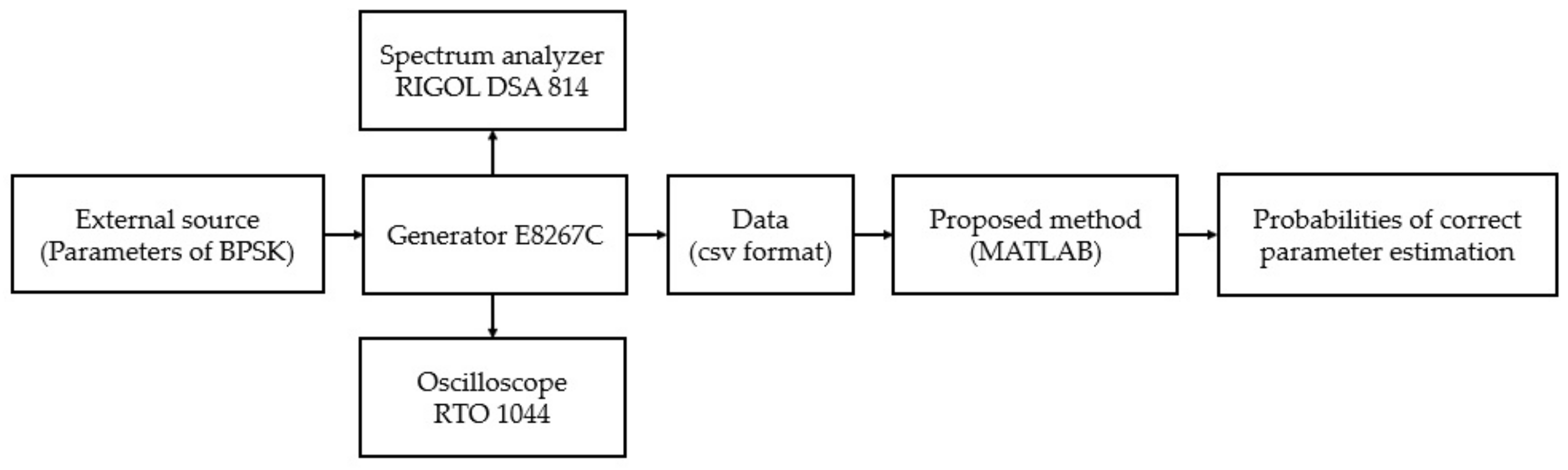
To overcome the previously mentioned drawbacks, a new technique for detecting and estimating BPSK signal parameters with an
(see
Figure 1), based on the cross-correlation function, is presented in this paper and in our previous paper [
16,
17]. This method consists of two stages: the first stage focuses on detecting BPSK signals or estimating their carrier frequency
; the second stage is used to estimate their pulse width
or symbol rate. Firstly, the proposed method was investigated, using simulated BPSK signals, in the MATLAB environment to predict the lowest SNR, at which the proposed method was still capable of detecting and estimating the BPSK signal parameters (
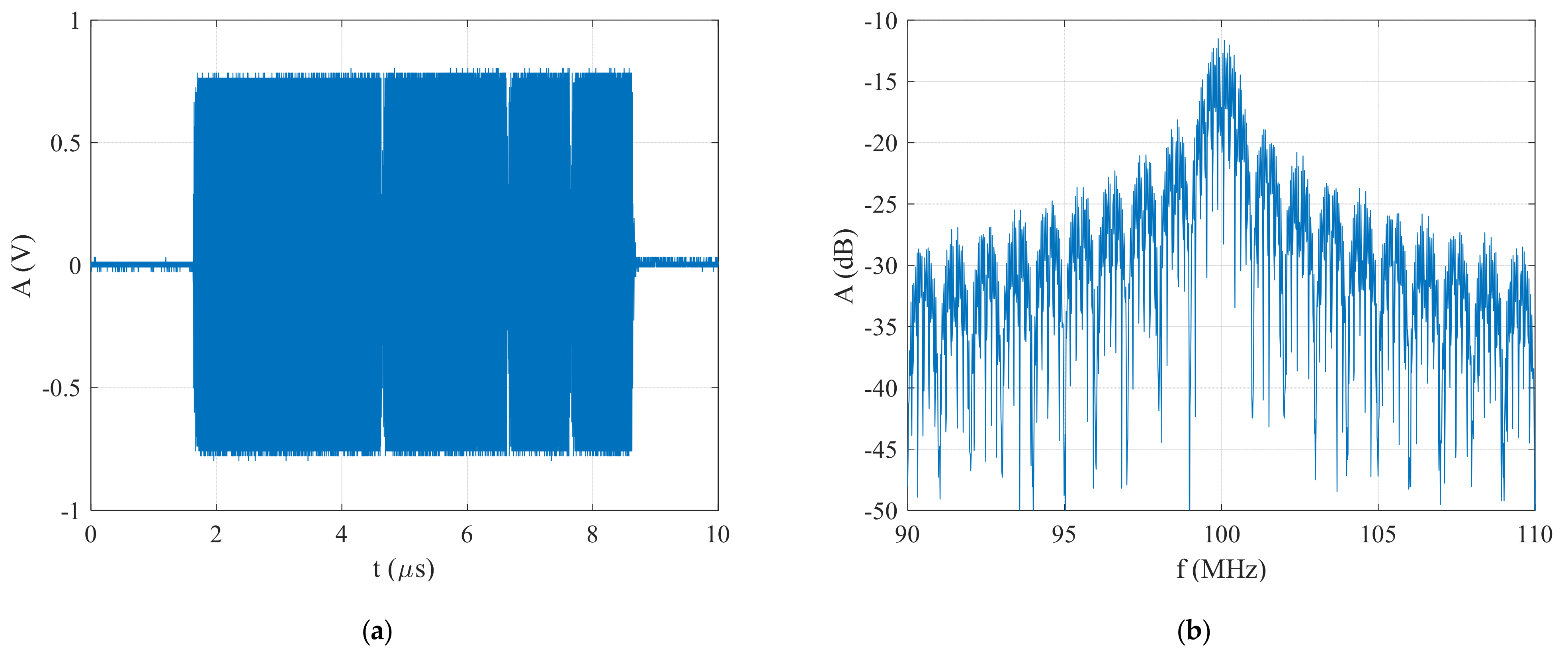
). Later, the functionality of the proposed method was verified by real-time BPSK signals generated by an E8267C PSG signal vector generator.
A theoretical description of the proposed technique is presented in
Section 2. The accuracy of this method was investigated in the MATLAB environment by different simulated BPSK signals, which are the most commonly used in radar systems, to predict the lowest SNR, at which the proposed method was still capable of detecting and estimating the BPSK signal parameters (90% detection probability and correct estimation) in
Section 3. The functionality of this method was verified by real-time BPSK signals in
Section 4. The main conclusions are summarized in
Section 5.
2. The Proposed Technique
In radar signal processing [
18], the cross-correlation function is used to measure the similarity of two signals as a function of time in relation to one another. This technique has been used in pattern recognition and single particle analysis. Therefore, the cross-correlation function between two signals,
and
, in the time domain is defined by Equation (1):
where
is the cross-correlation function between the two signals,
is the complex conjugate of signal
,
is the second signal at the time
, and
is the time delay. On the other hand, the cross-correlation function can be expressed by (2).
where
and
are the spectra of the signal
and
,
is the complex conjugate of
, and
is the inverse of Fourier transform [
19].
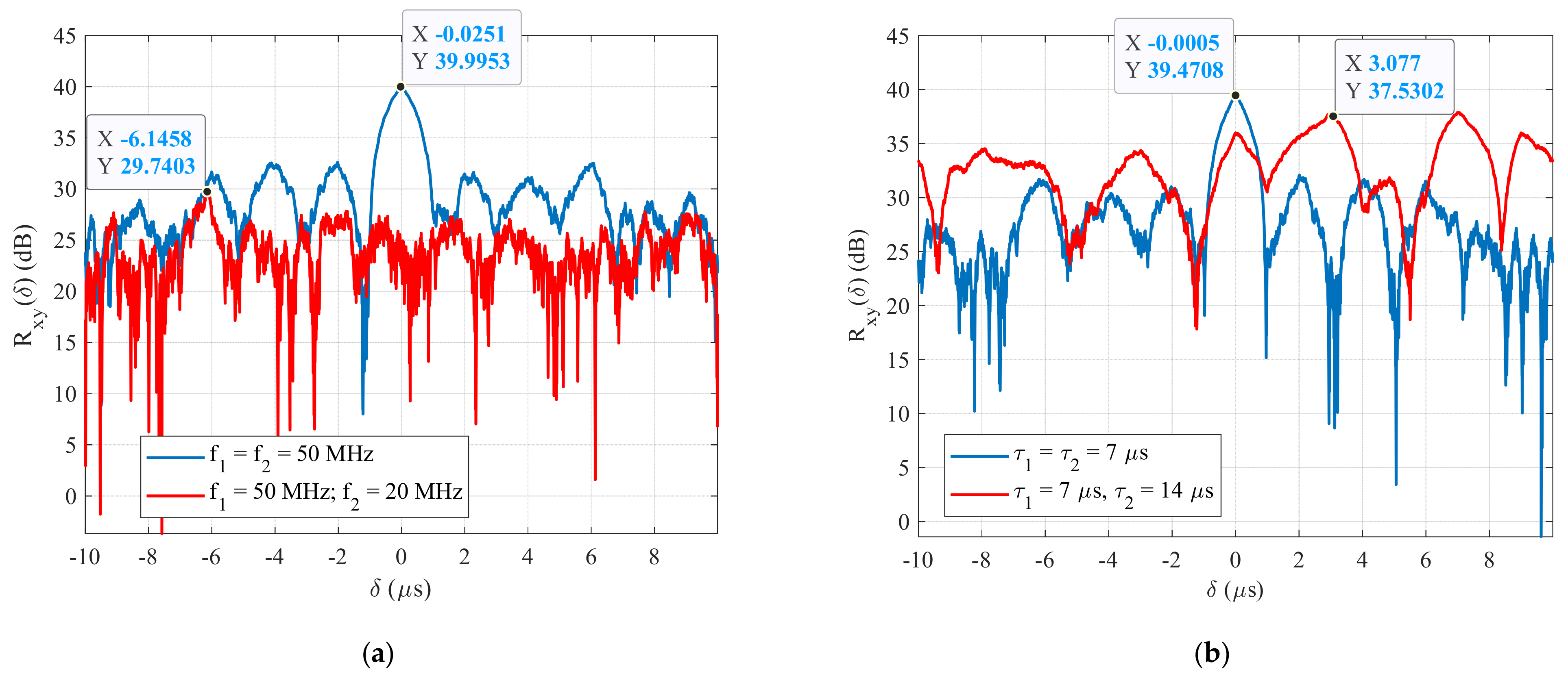
Figure 2a shows the simulation result of the cross-correlation function (CCF) between two BPSK signals generated with the same carrier frequency (
, blue line), and with different frequencies (
, red line), at the pulse widths (
) and an
. It clearly shows that when two signals have the same parameters (carrier frequencies), their CCFs have the highest value at the time delay
For the same case,
Figure 2b shows the plot of the CCFs between two BPSK signals generated with the same pulse widths (
, blue line) and with different pulse widths (
, red line) at a carrier frequency of
. This figure shows that the maximum CCF between the two signals, having the same parameters, is always higher,
, than the CCFs between the two signals having different pulse widths, even if they have the same carrier frequency
From these simulation results, a new technique for detecting and estimating the parameters of BPSK signals, based on the cross-correlation function, was proposed in our previous papers. The proposed method technique was divided into two stages. The first stage is used for detecting the BPSK signal or estimating its carrier frequency
, and the second stage is used for estimating its pulse width or symbol rate
. A block diagram of this technique is shown in
Figure 3. This figure clearly shows that two sets of reference BPSK signals are used. The signals in the first set of reference signals were generated with the same pulse width and with varying carrier frequencies. The signals in the second set were generated with the same carrier frequency, estimated in the first stage of the proposed method, and with different pulse widths. The steps of the proposed method are the following (Algorithm 1).
| Algorithm1 Steps of the proposed method |
Input parameters: are the parameters of the reference BPSK signals.
Output parameters: are the parameters of the received BPSK signals.
Step 1: Calculating the spectra of the received and first set of reference BPSK signals using FFT.
Step 2: Calculating the CCF between the received signal and the first set of reference BPSK signals using (2).
Step 3: Finding out the maximum as a function of the carrier frequency of the reference BPSK signals or .
Step 4: Finding out the maximum to estimate .
Step 5: Calculating the spectrum of the second set of reference BPSK signals using FFT.
Step 6: Calculating the CCF between the received signal and the second set of reference BPSK signals using (2).
Step 7: Finding out the maximum as a function of the pulse width of the reference BPSK signals or .
Step 8: Finding out the maximum to estimate and calculating . |
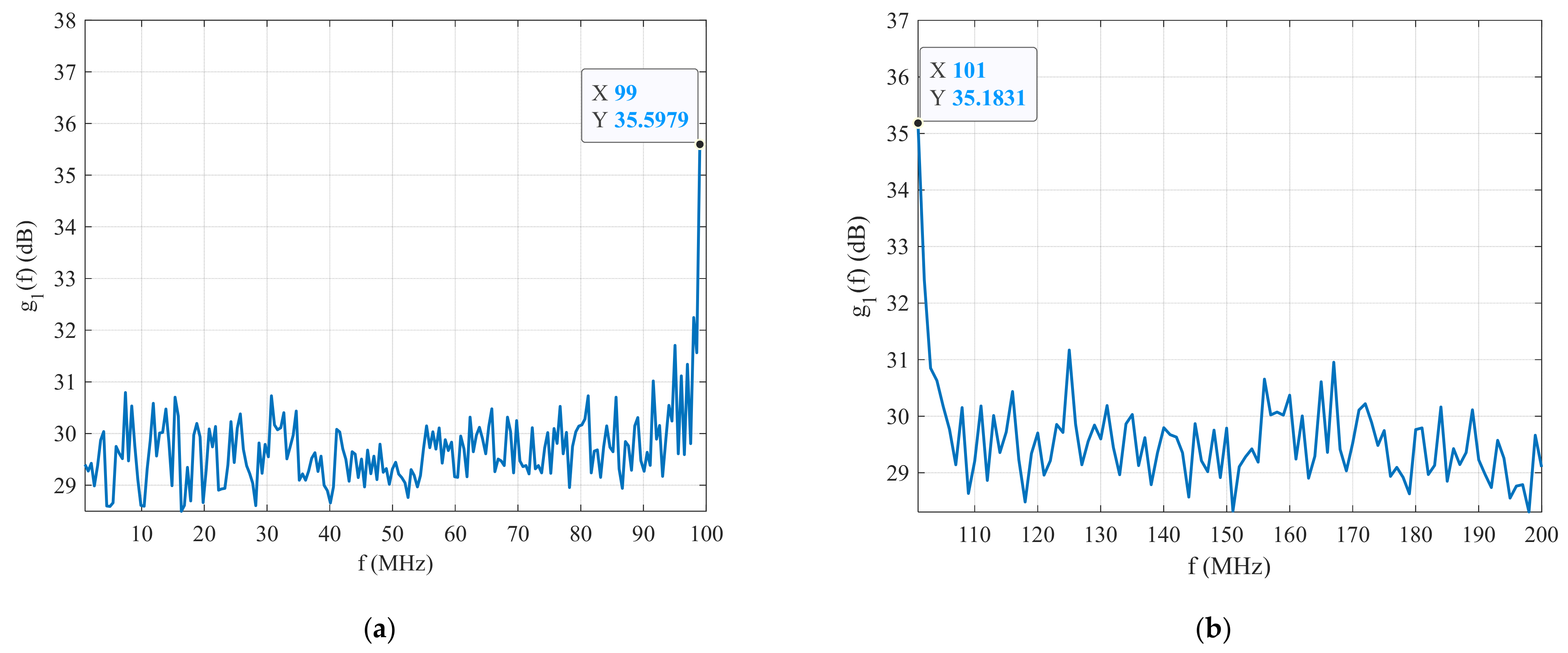
Figure 4 shows the plot of the peak CCFs between the received signal and the first set of reference BPSK signals as a function of their carrier frequency
. In this example, the carrier frequency
of the received BPSK signal is set out of the carrier frequency range of the reference signals (
, see
Table 1). This figure shows that maximum
is always at the highest (
with
, see
Figure 4a) or at the lowest carrier frequencies of the reference BPSK signal (
with
, see
Figure 4b). It means that the frequency bandwidth of the reference signals is not correctly set. From these simulation results, the frequency bandwidth
needs to be adjusted (see
Table 2).
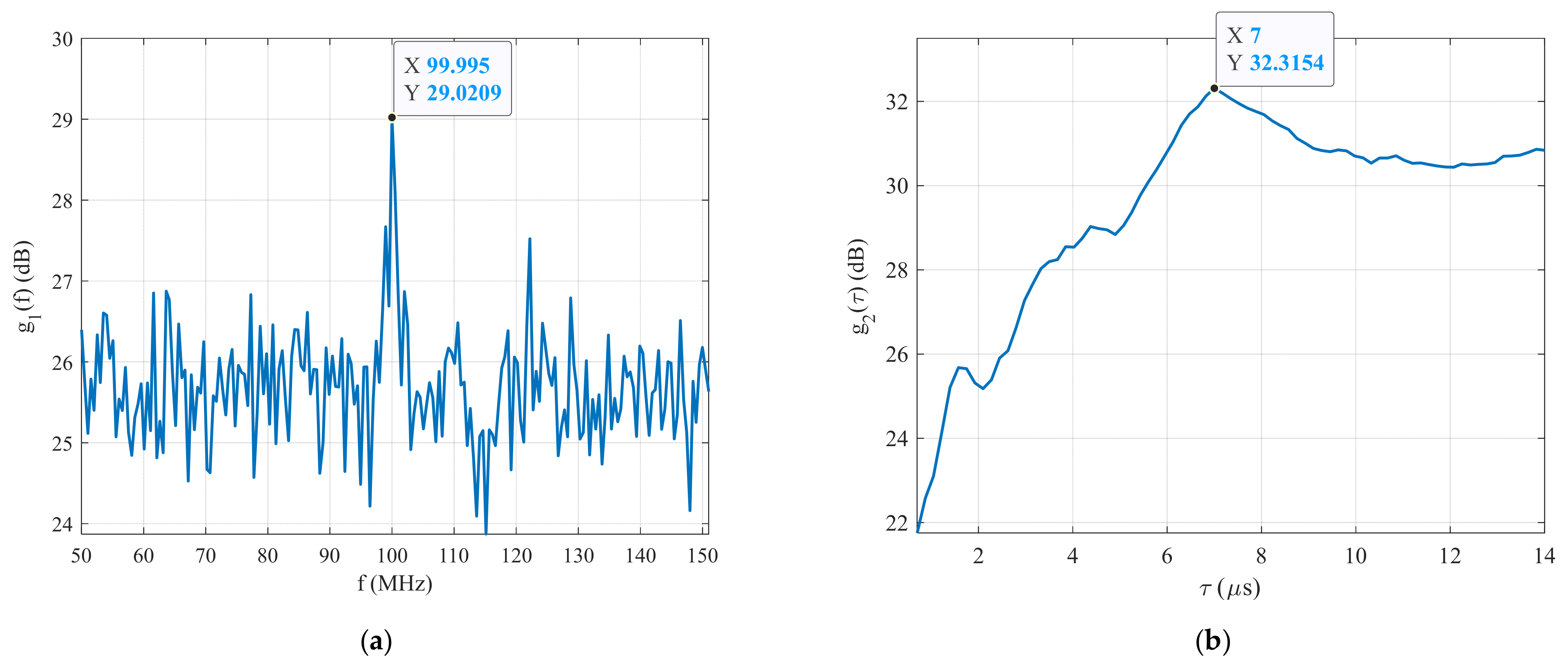
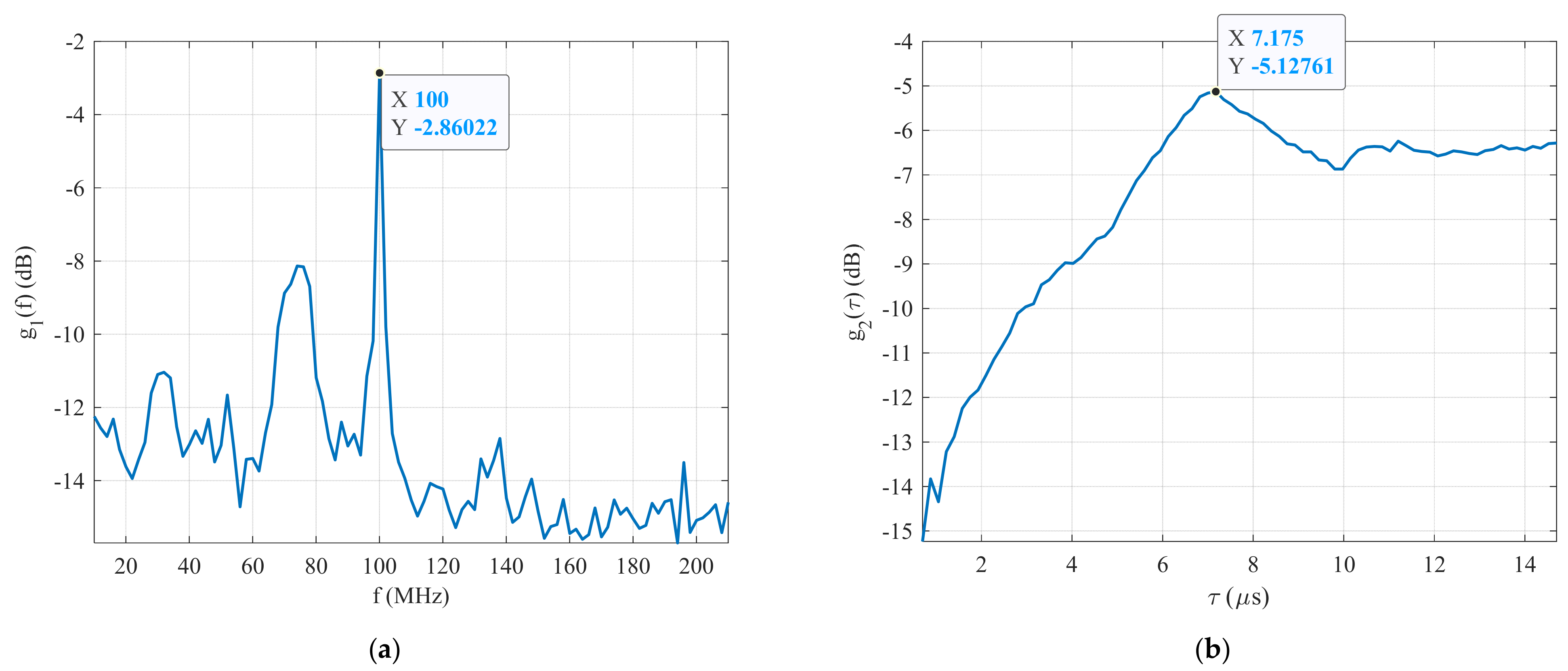
In order to detect a signal or estimate its carrier frequency
, the index of the reference BPSK signal, which provides the highest CCF with the received signal, or the maximum
are required. The maximum CCF as a function of the carrier frequency
of the reference signals is shown in
Figure 5a. This figure shows that the maximum
is
at
. It also shows that the unknown BPSK signal is close to the reference signal and its carrier frequency is estimated as
. In other words, the unknown BPSK signal was detected, or its carrier frequency was estimated during the first stage of this method.
The next step in this work is to generate the second set of reference BPSK signals with the carrier frequency estimated during the first stage of this technique, and with varying pulse widths ranging from 0.1 to 20
. The following step is to calculate the second CCF between the received signal and the second set of reference signals. As previously mentioned in relation to the estimation of the carrier frequency
of the BPSK signal, the reference signal index or the maximum
are required. The maximum CCF between the received signal and the second set of reference signals
as a function of the pulse width
or a function of
is plotted in
Figure 5b. This figure shows that the highest
is
at
. It means that the pulse width of the received BPSK signal was estimated during the second stage of this technique.
Table 3 lists the estimated parameters of the received BPSK signal with Barker Code 7 at an
, acquired by running the system for 200 loops.
The main advantage of the presented technique is its ability to simultaneously measure of the parameters of the pulse and the detection of pulse under noise, which lead to its ability to detect signals in lower SNR environments.
In the next step of this paper, the accuracy of the proposed technique was investigated with different simulated BPSK signals, such as Barker Codes 7, 11, and 13. It was simulated in the MATLAB environment to predict the lowest SNR, at which this technique still achieved 90% of the detection probability and the correct pulse width estimations for all the BPSK signals.
3. Simulation Results
A theoretical description of the proposed technique for detecting and estimating the BPSK signal parameters was presented in our paper [
16,
17]. In this section, the proposed technique accuracy was investigated in the MATLAB environment, with different simulated BPSK signals (different type of Barker Codes), by running the system for 500 loops at an SNR ranging from
to
. All the tests were performed under the condition that the parameters of the received BPSK signals were within the observed parameters of the reference signals (
).
The detection probability
for all the simulated BPSK signals as a function of the SNR is shown in
Figure 6a. It is clear that the proposed technique achieved the highest detection probability for the simulated BPSK signal with Barker Code 13 (
at an
, red line), followed by the BPSK signal with Barker Code 11 (
at an
, blue line), and the lowest detection probability was for Barker Code 7 (
at an
, black line). Ultimately, the lowest SNR was an
in order to reach a 90% detection probability for all the signals.
The same principle was applied to the estimation of the
of the received signal. The probability of the correct pulse width estimation of all the BPSK signals as a function of the SNR is presented in
Figure 6b. This figure shows that this method achieved the best result for the BPSK signal with Barker Code 13 (
at an
, red line), followed by Barker Code 11 (
at an
, blue line), and the worst result was for Barker Code 7 (
at an
, blue line) in terms of the SNRs. The lowest SNR, at which this technique was still able to reach 90 % of the correct pulse width estimation probability for all the test BPSK signals (
), was
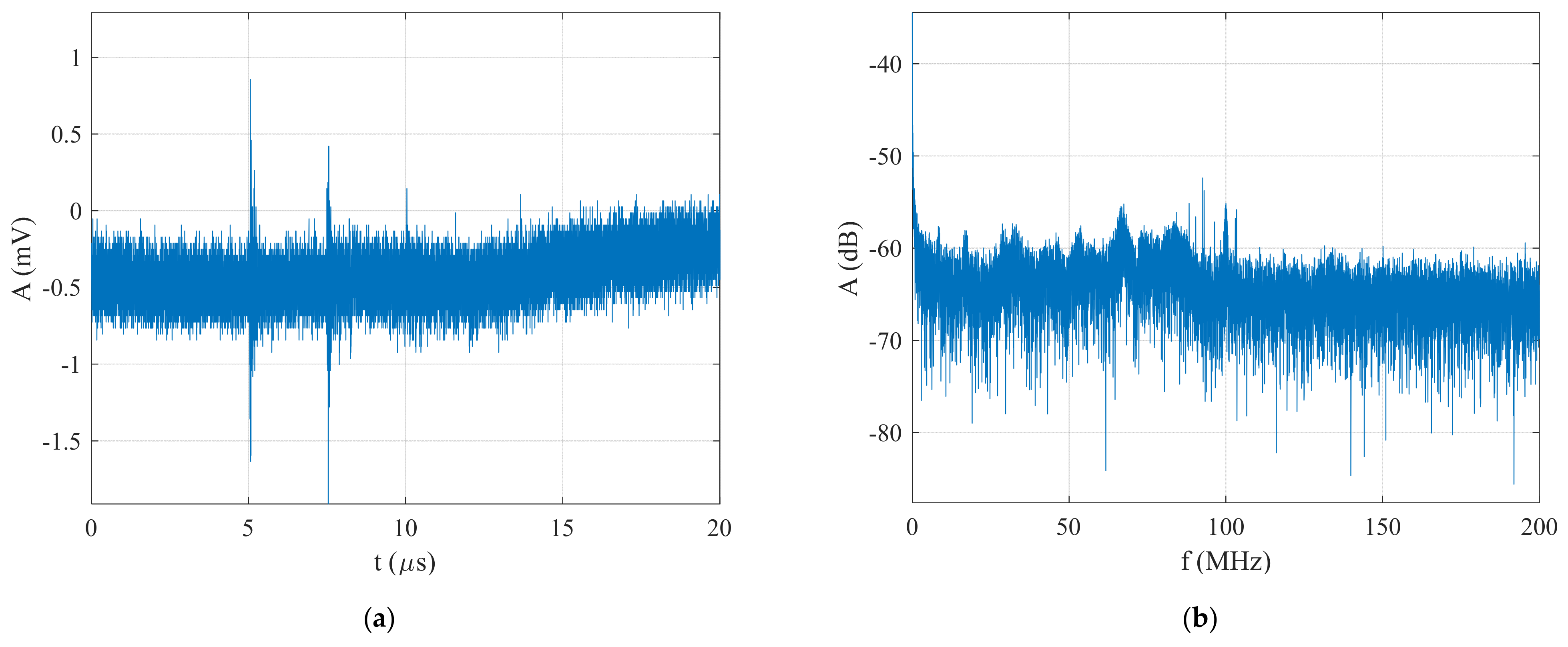
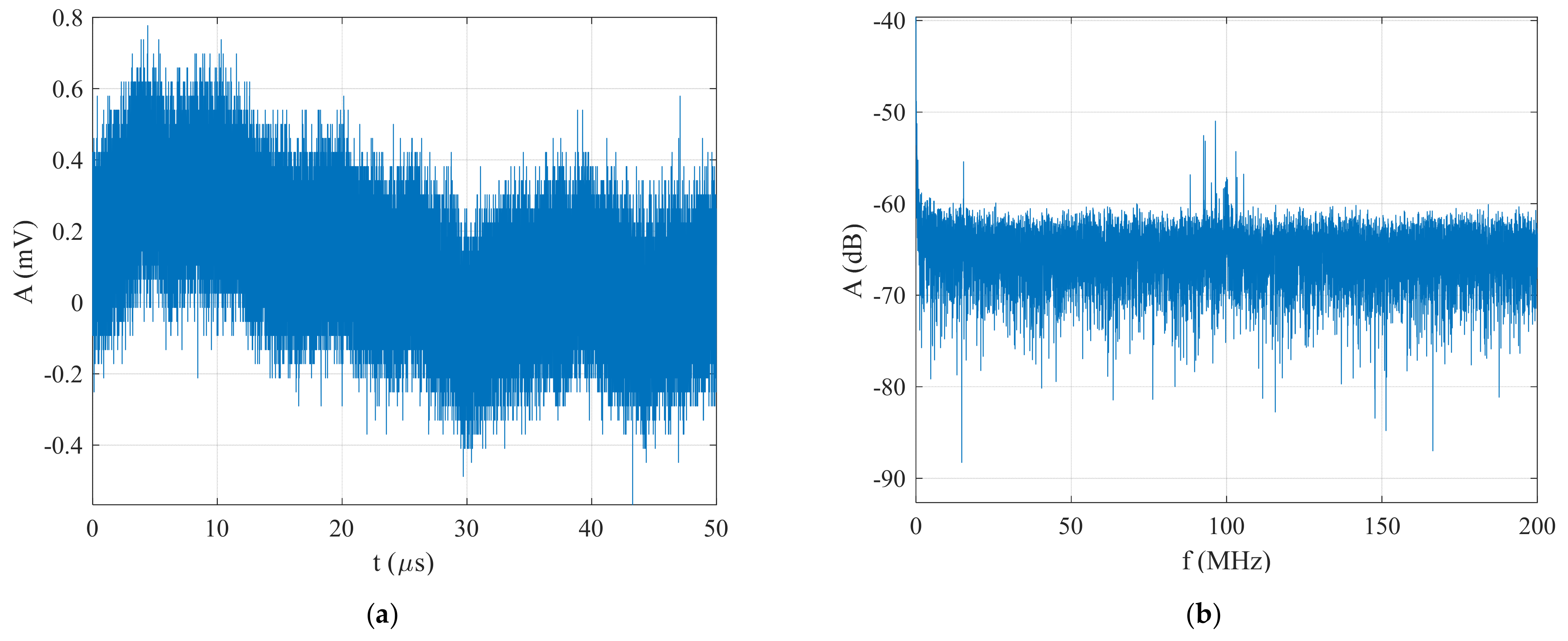
. In the next section of this paper, based on the simulation results, the functionality of this technique was verified by real-time BPSK signals generated using an E8267C vector signal generator.
5. Conclusions
The main goal of this article was to increase the range of passive ELINT systems on a radar with a BPSK intra-pulse modulation, where Barker Code lengths 7, 11, and 13 were the most frequent. The main concern was to find out if these pulses are evenly irradiated by the sidelobes of a radar with a high SLS antenna when the parameters of the pulse (CF, PW, and code) are unknown.
A new technique for detecting and estimating the parameters of a BPSK signal with Barker Codes 7, 11, and 13 in a high-white-noise environment, based on a cross-correlation function, was presented and verified in this paper. The simulation results show that this technique is capable of detecting and estimating the parameters of all simulated signals at an .
In the second part of this paper, based on the simulation results, the functionality of the proposed technique was verified with real-time BPSK signals, generated by an E8267C PSG vector signal generator. The experimental test results show that this technique is able to detect and estimate the parameters of the BPSK signal for Barker Code 7 at an for Barker Code 11 at an , and for Barker Code 13 at an .
Moreover, the proposed technique was more effective than the existing methods currently used to detect and estimate the parameters of BPSK signals (their carrier frequency and pulse width). The proposed technique requires the lowest
for detecting the signal, while the existing methods require an
in [
15] and an
in [
13].
In future work, the proposed technique will be applied to multicomponent BPSK signals using different types of Barker Codes (such as Barker Codes 7, 11, and 13) or different types of phase-coded signals (such as Polyphase Barker Codes and Frank Codes) in a high-noise and -interference environment using CW signals.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}