
Fault Diagnostics and Tolerance Analysis of a Microgrid System Using Hamilton–Jacobi–Isaacs Equation and Game Theoretic Estimations in Sliding Mode Observers

 , , and
, , and 
Abstract
:1. Introduction
- The major contribution of the paper is to incorporate an estimation of game theoretic saddle points similar in nature to robust control parameters (), using their respective cost functionals and inequality version of HJIE in SMO theory, through Lyapunov theory and convex optimization of consequent LMIs, which also ensures stability. The concept is applied on VSC-based microgrid model.In comparison to earlier works, they have used an approach of using robust control parameters and game theory for ordinary Luenberger Observers, whereas this study has incorporated the mentioned approach in sliding mode observers having a Luenberger gain for output estimation error term along with another switch term gain, which ensures more robustness along with suitability for switching electronic systems. Moreover, this work has incorporated game theoretic saddle points through convex optimization of LMIs, unlike earlier works;
- The approach works mainly for sensor faults of microgrid and particularly for multiple faults occurring simultaneously in their sensor current and potential transformers. The approach works very well for many other types of faults such as square pulse (intermittent), ramp faults (i.e., incipient nature), constant faults, etc., but the results are not included in the paper;
- The inequality version of HJIE (i.e., Hamiltonian as the inequality constraint), which ensures stability in terms of Lyapunov function (with its negative definiteness) along with giving constrained LMIs. The stability analysis through a cost functional constrained inequality version of HJIE and hence determination of corresponding LMIs are convex optimized to determine the respective SMO gain. The gains are determined for , and then compromised of both constraints, which are included as theorems as a major contribution of this work;
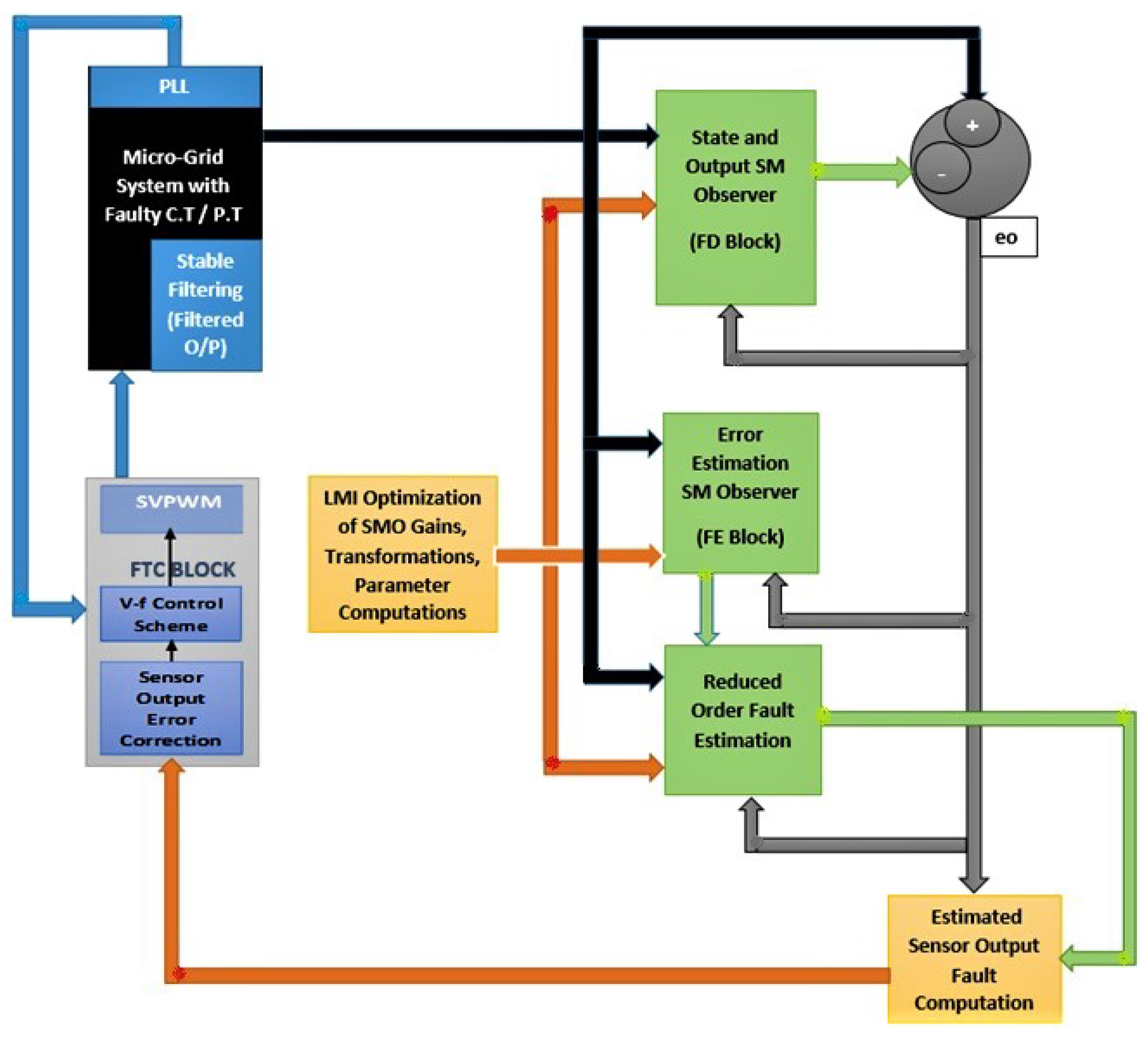
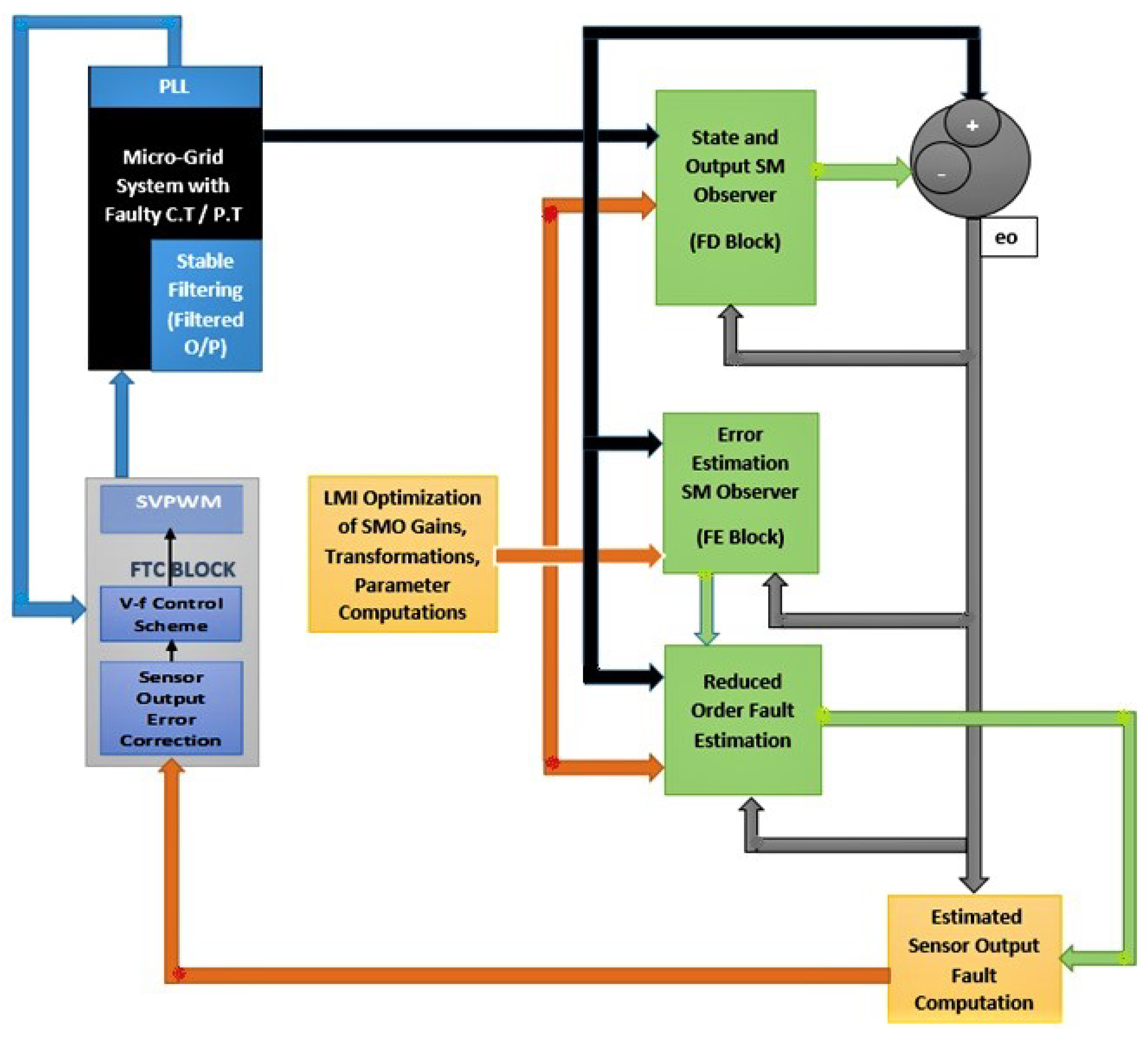
- The fault/disturbance estimation by SMO theory, is used for correction of faulty sensor outputs to be supplied to the control block, hence acting additionally as a fault-tolerant control. This part uses the work of the base paper of the authors of this study, referred to in [32].
2. System Modeling
2.1. Mathematical Model of Current/Potential Transformer Faults
2.2. Mathematical Model of the Microgrid System
2.3. Stable Filtering and Augmented System
3. Fault Diagnosis Using SMOs (Preliminaries)
4. Stability Analysis and Determination of Robust to Disturbance/Fault Sensitive SMO Gains
4.1. Robustness Analysis
4.2. Minimum Fault Sensitivity Analysis
4.3. Theorem 3: Criteria Based on HJIE for Observer Design
5. FTC Approach/Working
| Algorithm 1. Algorithm of the Procedure. |
| Inputs: , , , |
| Outputs: Matrix P, Gains (), , , , , , , , , , , |
| while (For the given Time of simulation/process) |
| START: |
| 1: d-q-0 transform the linearized system model Equation (2) by Equation (3); |
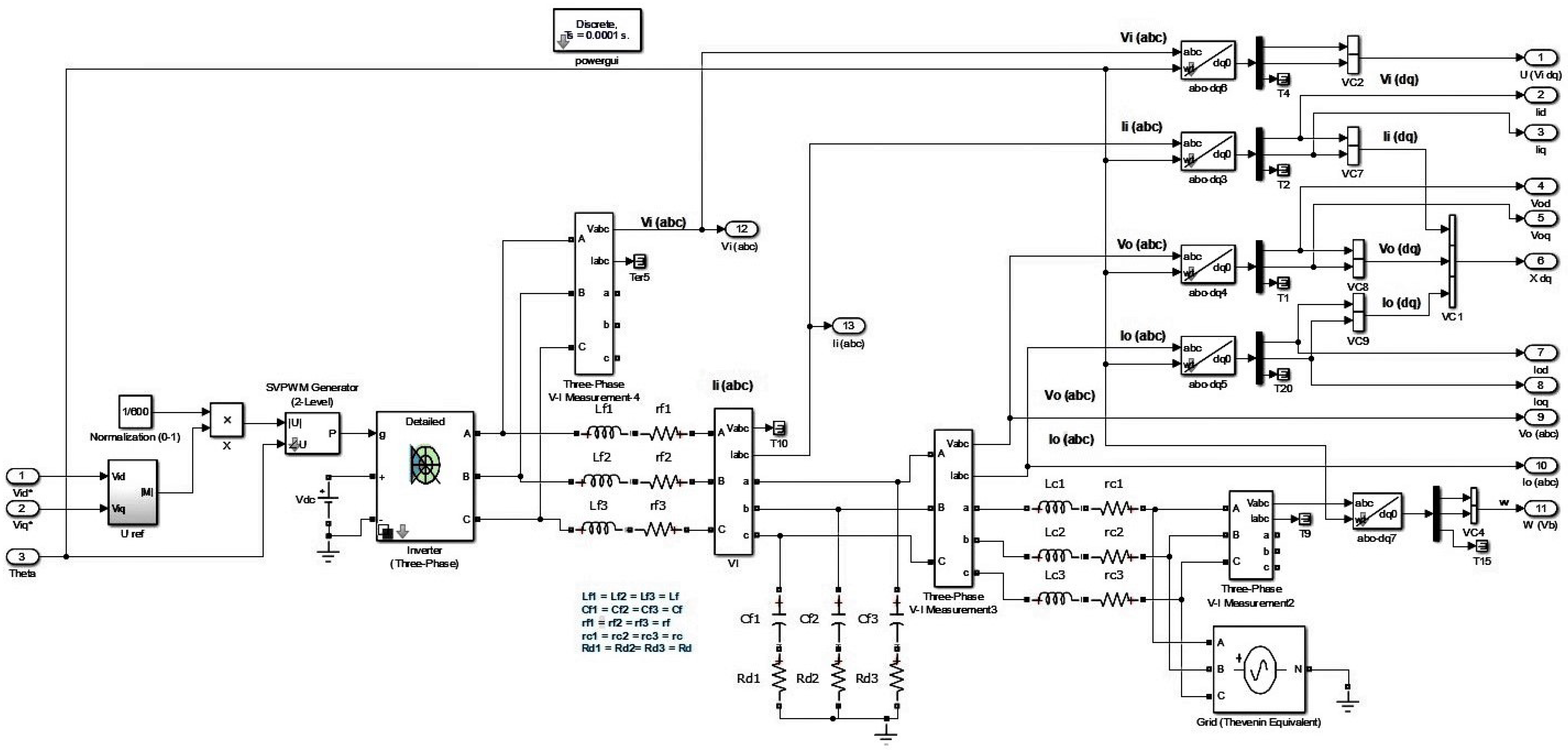
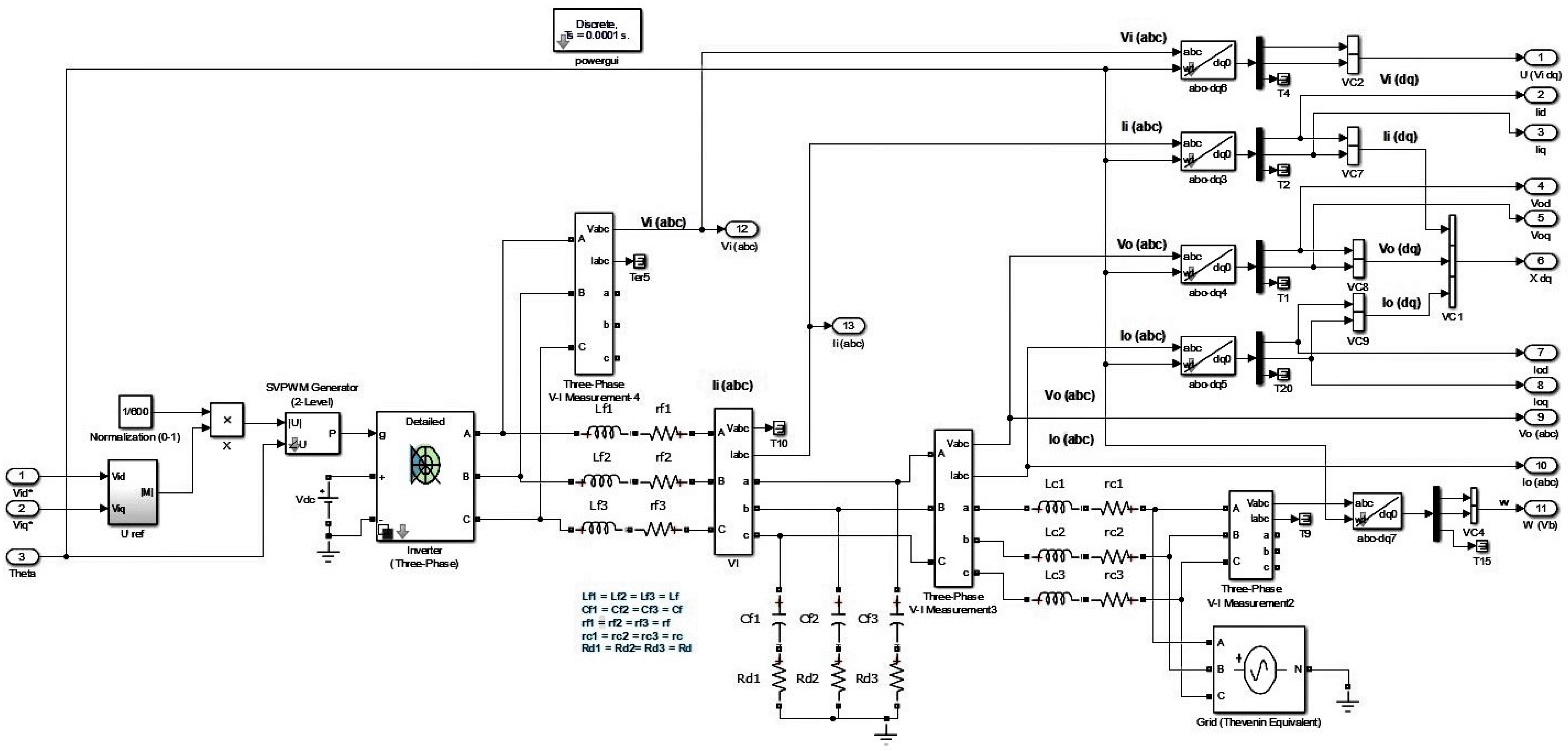
| 2: Take converter/grid voltages (, ) from Simulink hard wired microgrid model in Figure 2; |
| 3: Generate the faults and disturbances to be added (representing) sensor/C.T/P.T faults; |
| 4: Give voltages (, ) as inputs to the Simulink-based mathematical model of a microgrid, in Equation (6); |
| 5: Add faults/disturbances (, ) to the output equation of the system represented by Equation (7); |
| 6: Pass the faulty system output in Equation (6) from a stable filter defined in Equations (8) and (9) to reduce the magnified effect of faults and disturbances; |
| 7: Augment the system states with stable filtered output, as done in Equations (10) and (11); |
| 8: Pass the augmented system state from state/output estimator SMO in Equation (14); |
| 9: Determine the augmented (state/stable filtered output) estimation error by taking the difference between system and observer states/outputs as defined in Equation (15); |
| 10: Use constraint mentioned in Equation (35) ( parameter is worst case/ minimal fault in Equation (34)) in HJIE in Equation (37) (to fulfill the saddle point requirement); |
| < constraint in parallel is given by Equation (23), the worst case disturbance upper bound in Equation (24), and the respective HJIE in Equation (26)>; |
| 11: Determine the constrained LMIs from the above equation in vector form as defined in (44) for and Equation (32) for ; |
| 12: Convex feasibility and optimize the constrained LMI given in Equation (44) (for constraint) and Equation (32) (for constraint) using the function ‘feasp’ in the Appendix A.4 to find the optimal gain as defined in the Theorem 1 statement, and switch term gain , as defined in Lemma 1; <Gains are determined from Lyapunov P or Q matrices , using Lemma (1) and given in detail in [32] >; |
| 13: Use the same SMO gains in state/output estimator SMO in step 8; |
| 14: Determine the state estimation error as determined in Equation (15); |
| 15: Give stable filtered output estimation error part of the total error vector (), i.e., () in Equations (17) and (18) to state/output estimator SMO in step 8 and the state error estimator SMO in Equations (20) and (21) to attain the sliding mode; |
| 16: If (the sliding mode is attained in Equations (20) or (21)), |
| Feed the state estimation error to the reduced order state estimation error, explained in Lemma 7 (details in [32]); |
| 17: Determine the gains ( (defined in Lemma 7), , reduced order state error )) (details in [32]); |
| 18: Compute the estimated fault as done in Equation (47) and the disturbance as in Equation (48); |
| 19: Use the estimated faults and correct the faulty sensor readings by adding/ subtracting from it, as done in Equation (49). |
| 20: Feed the corrected sensor output values to PI and Droop based current/voltage/real power/complex power control as shown in the detailed Simulink based block diagram with details in the FTC section of [32]; |
| 21: Repeat Step 10 onward for the constraint in (24) and the compromised constraints. |
| END (of while loop) |
6. Results and Discussions
7. Conclusions
- This paper has considered the VSI-based microgrid model as an application to apply the enhanced (in robustness or sensitivity to fault) sliding-mode observer for fault diagnosis and fault-tolerant control.
- The saturation faults of current/potential transformers (which are mounted in the passage of LCL filters are specifically considered, along with the general applicability of the approach for a good range of sensor/actuator faults;
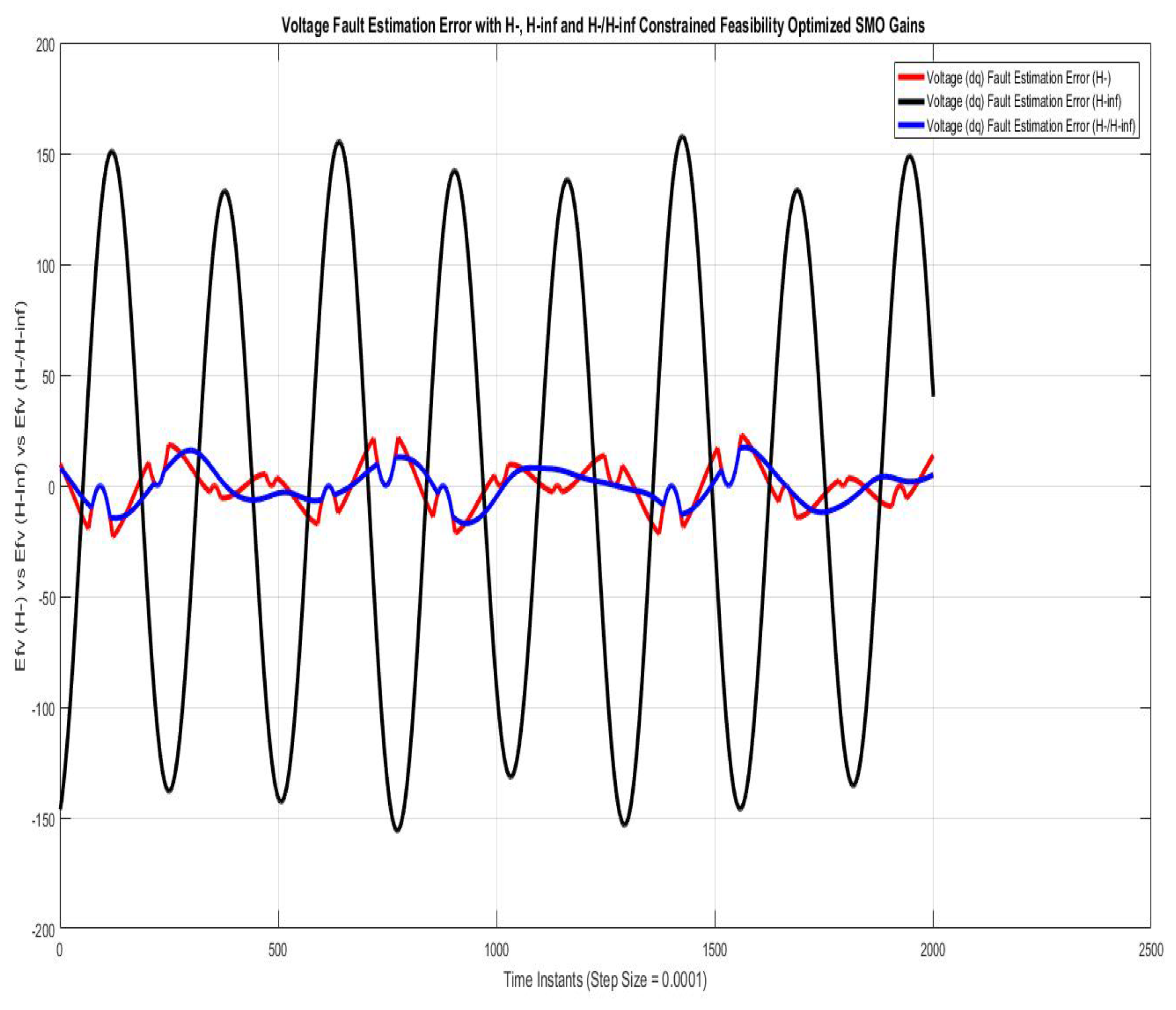
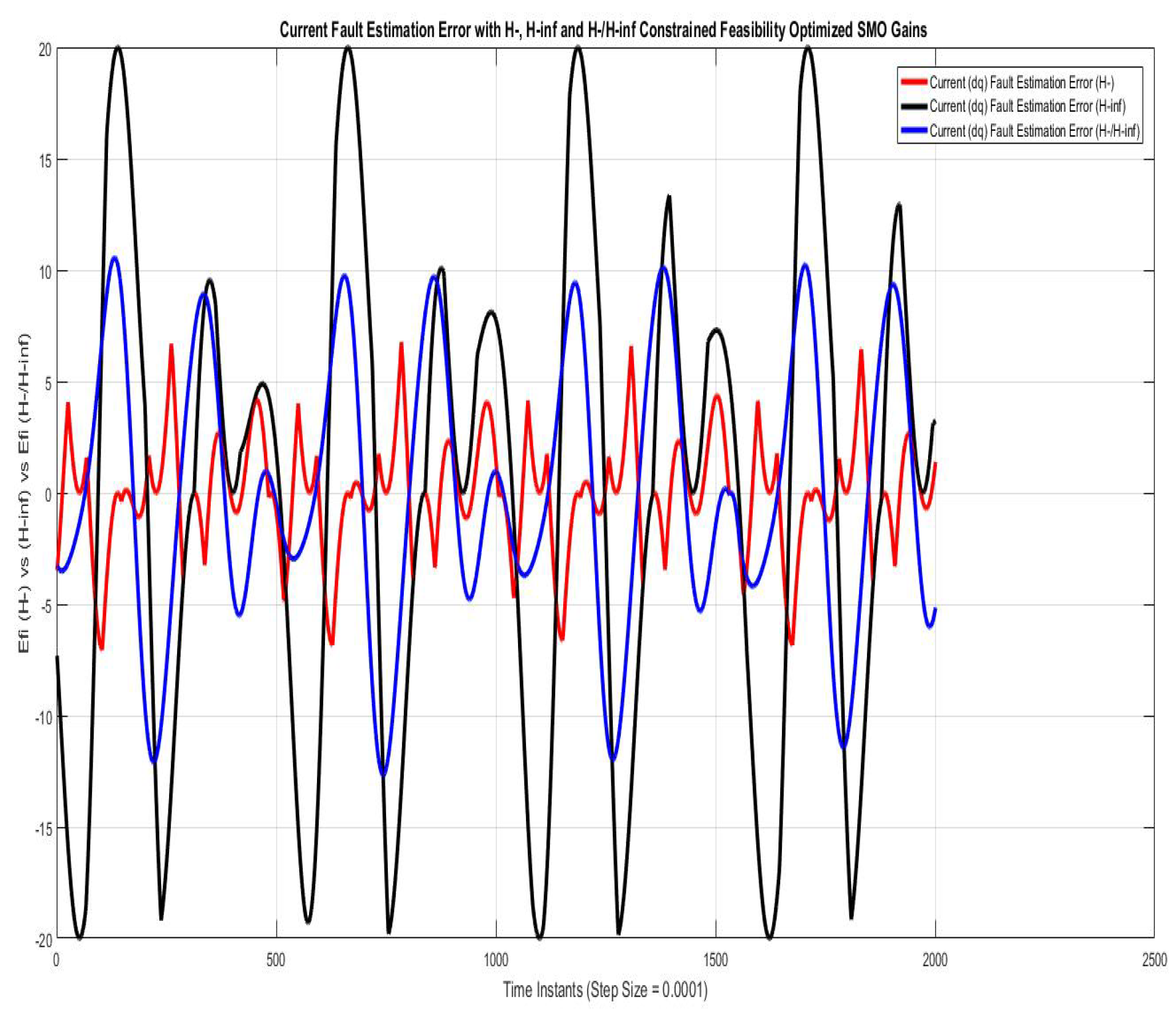
- and parameters of robust control similar in nature to the game theoretic saddle points are used to derive the inequality version of HJIE, which is in terms of the Lyapunov function, faults, or disturbances, and the output error estimation vector as variables. The HJIE in inequality form not only proves the stability of observers but also gives the LMIs, which are convex optimized, to find the ( and ) constrained SMO gains providing the optimal/sub-optimal values of SMO gains (, , , ), as mentioned in the pair of saddle points, i.e., (,) and (, ). The sliding-mode observer using the above gains in terms of the error vector is used to estimate the faults and disturbances;
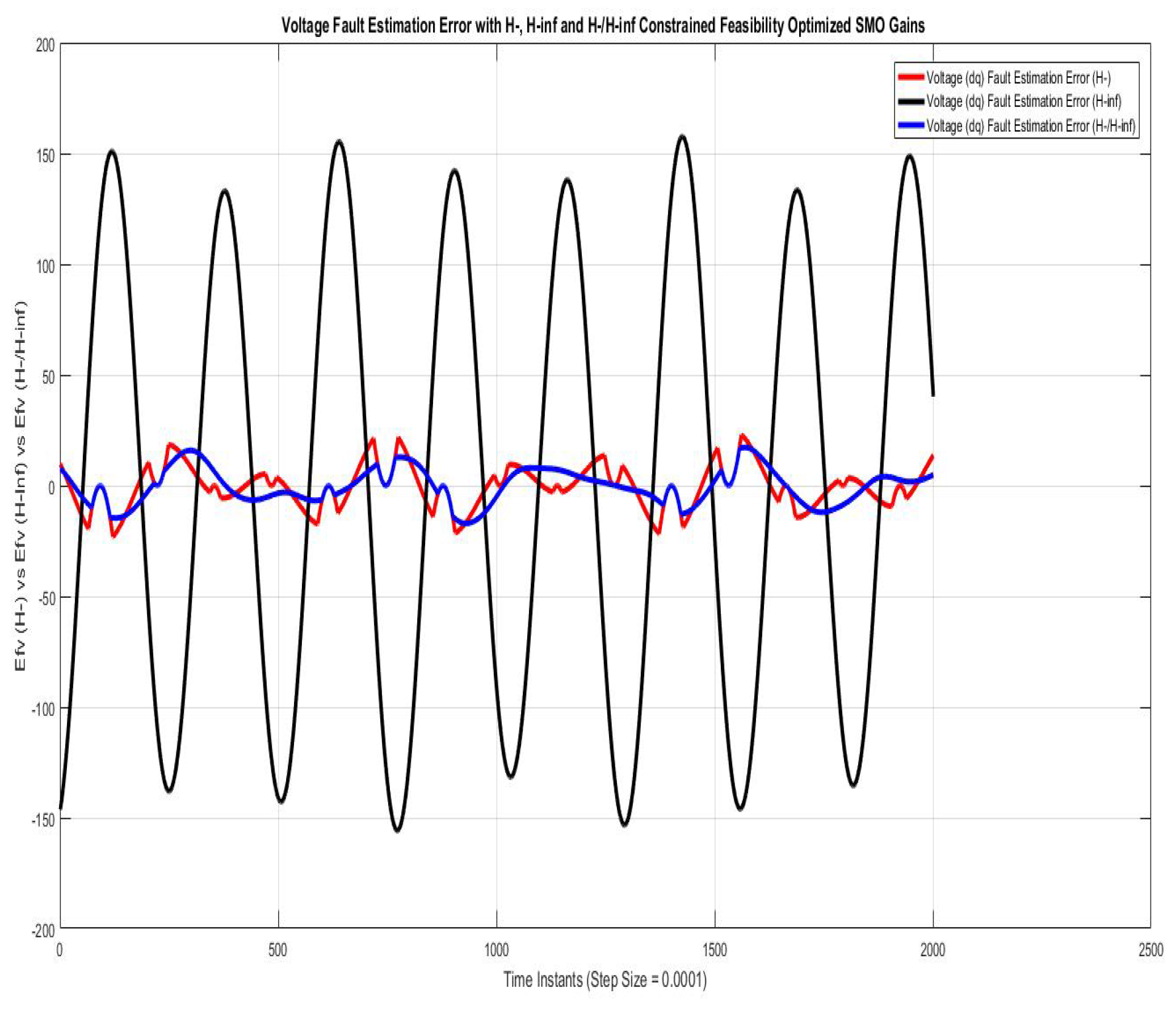
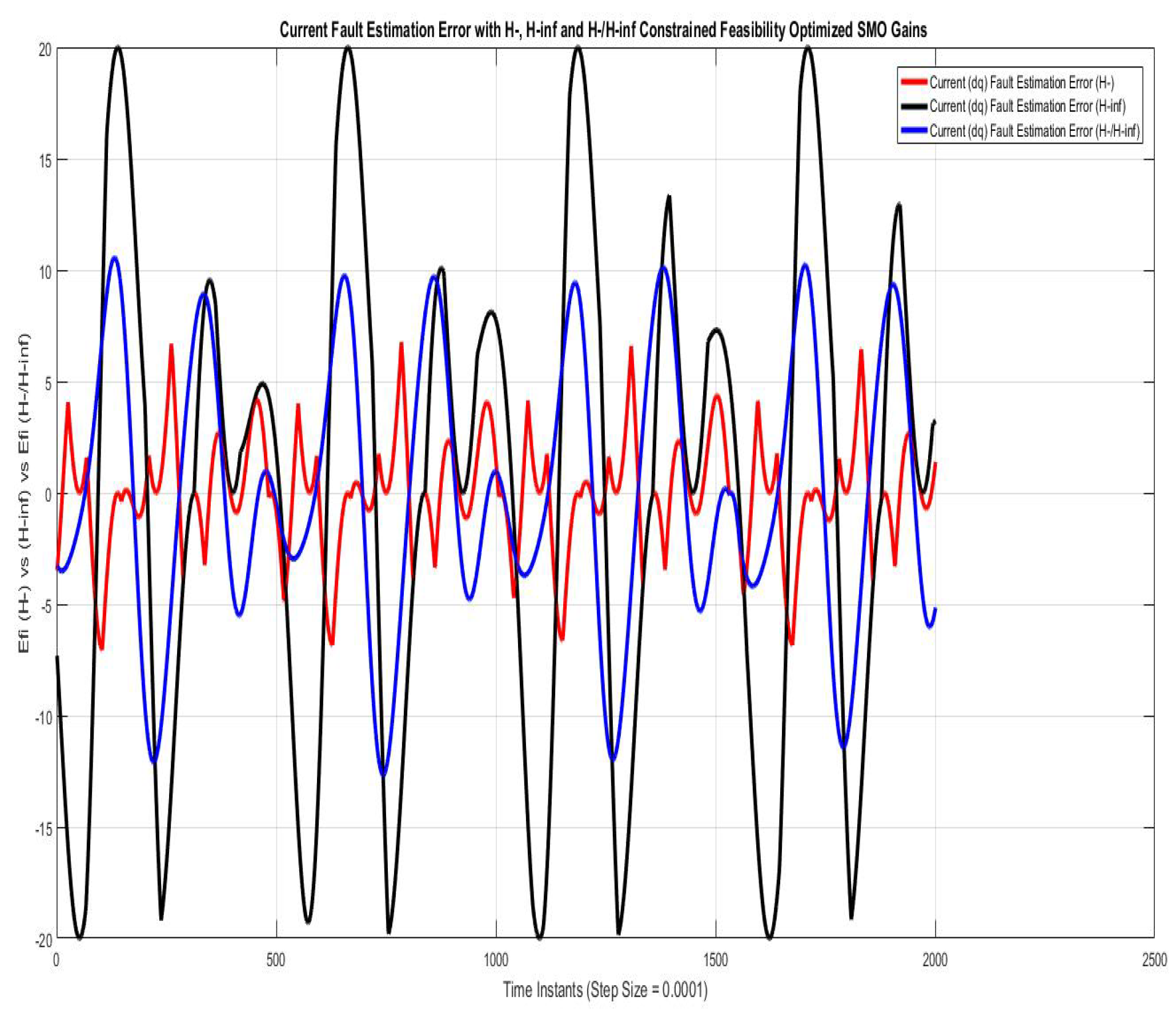
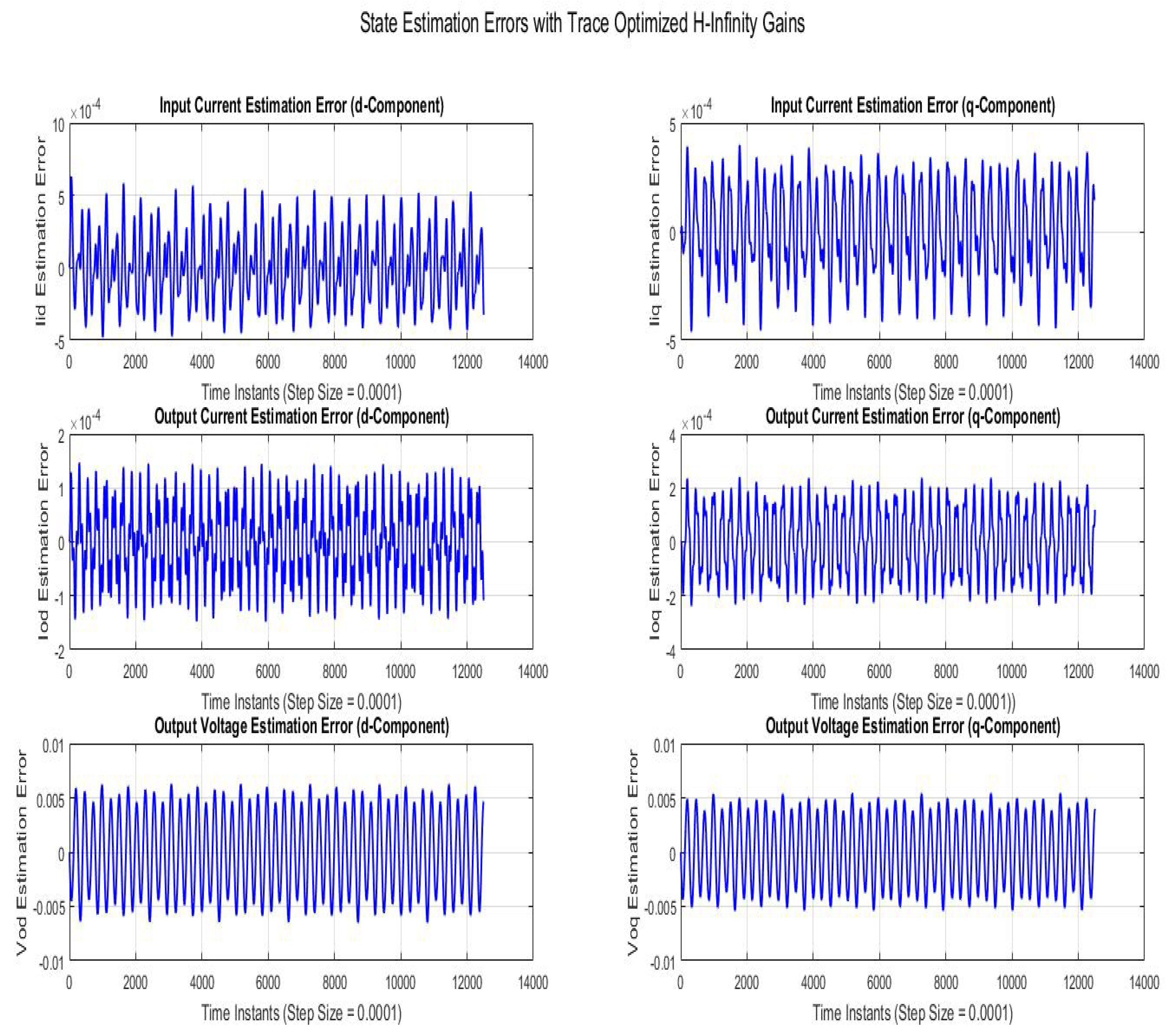
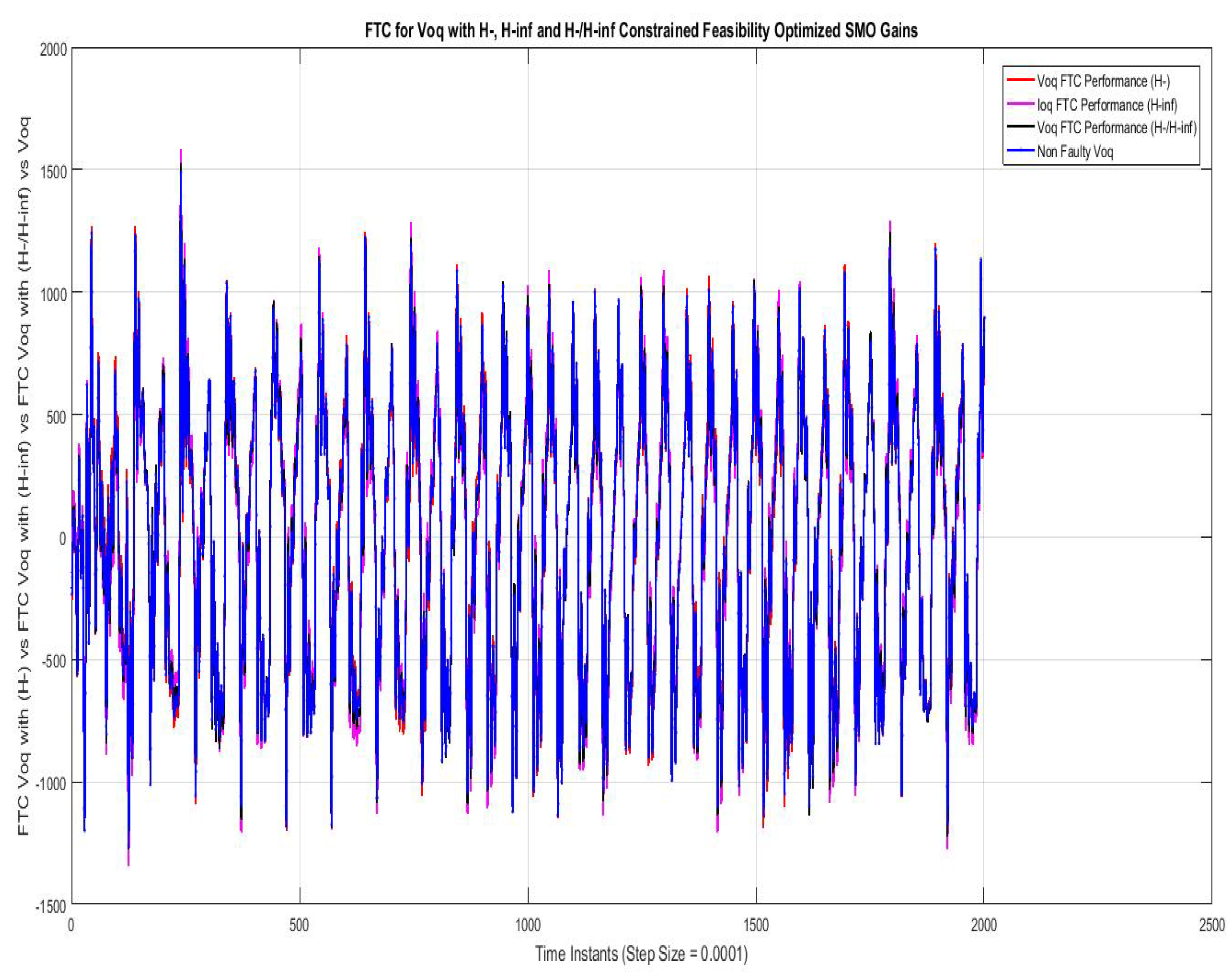
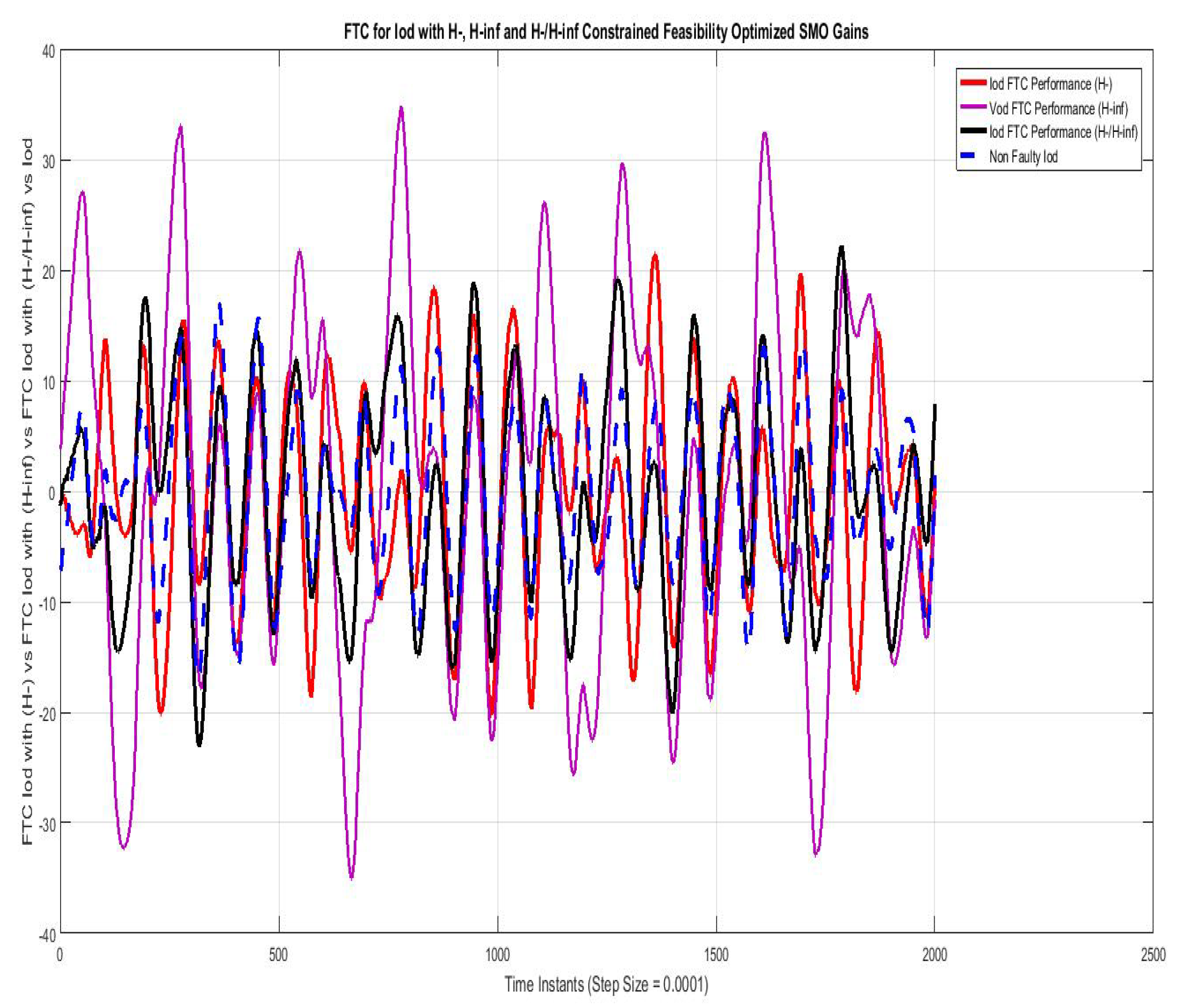
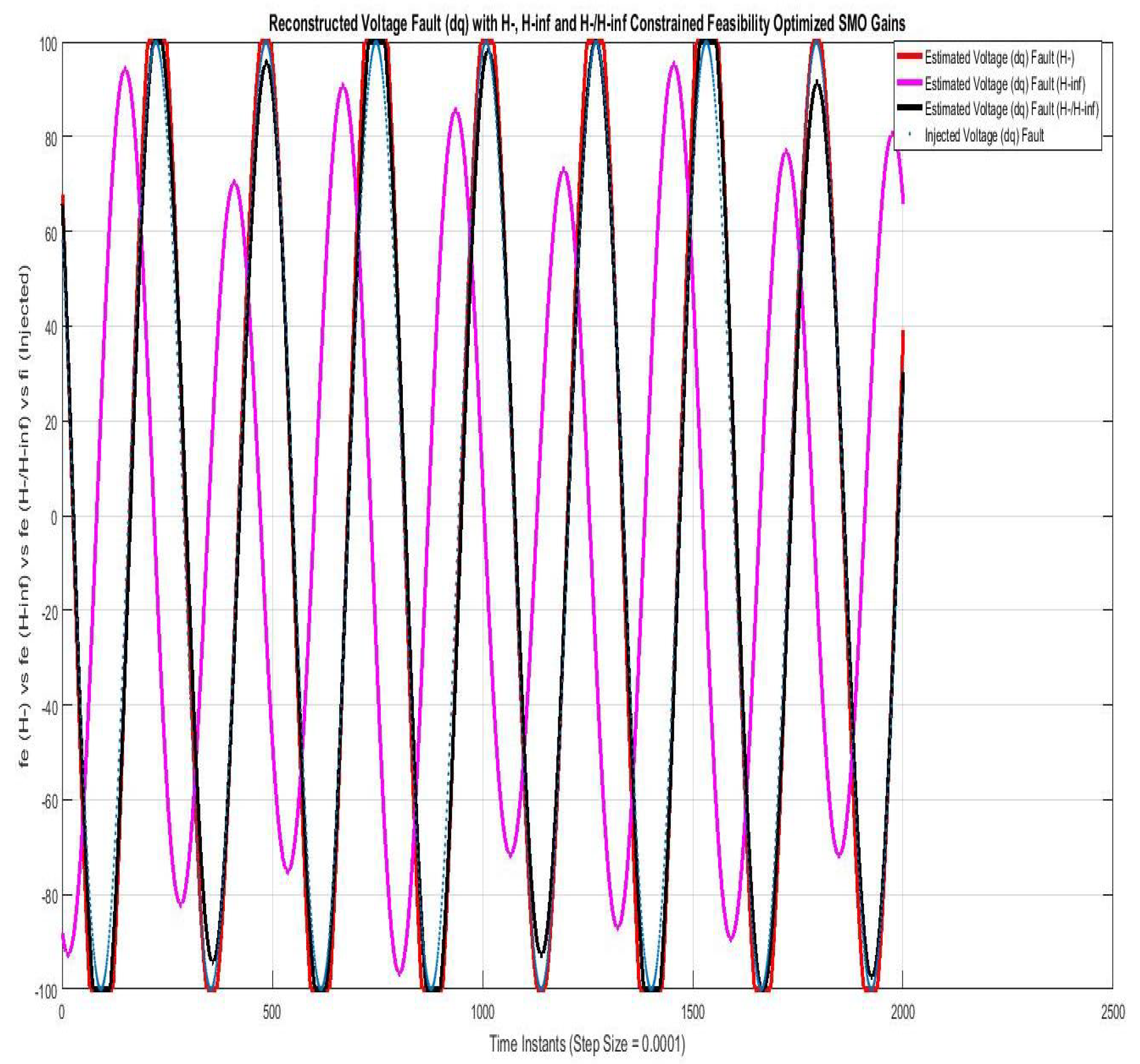
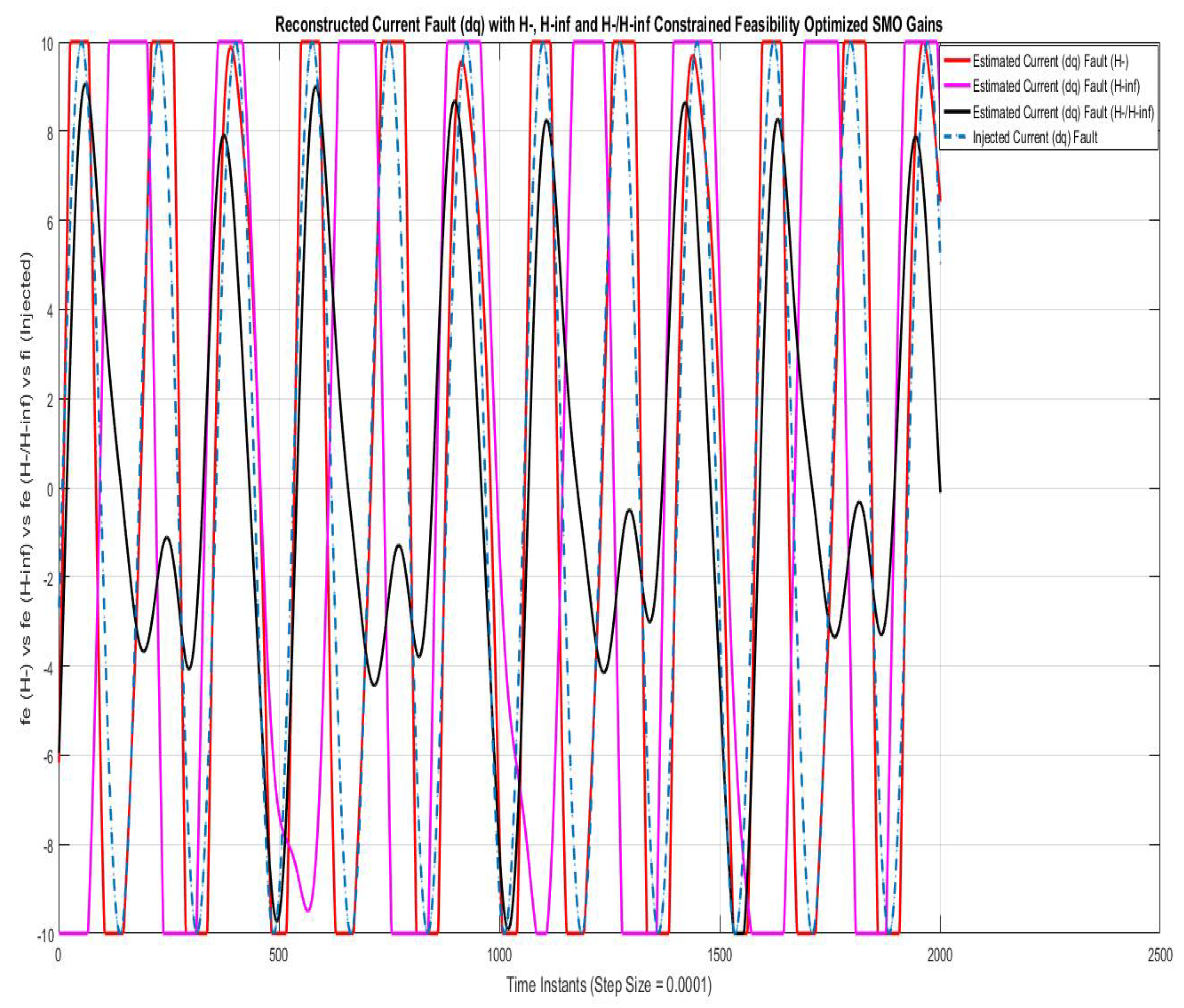
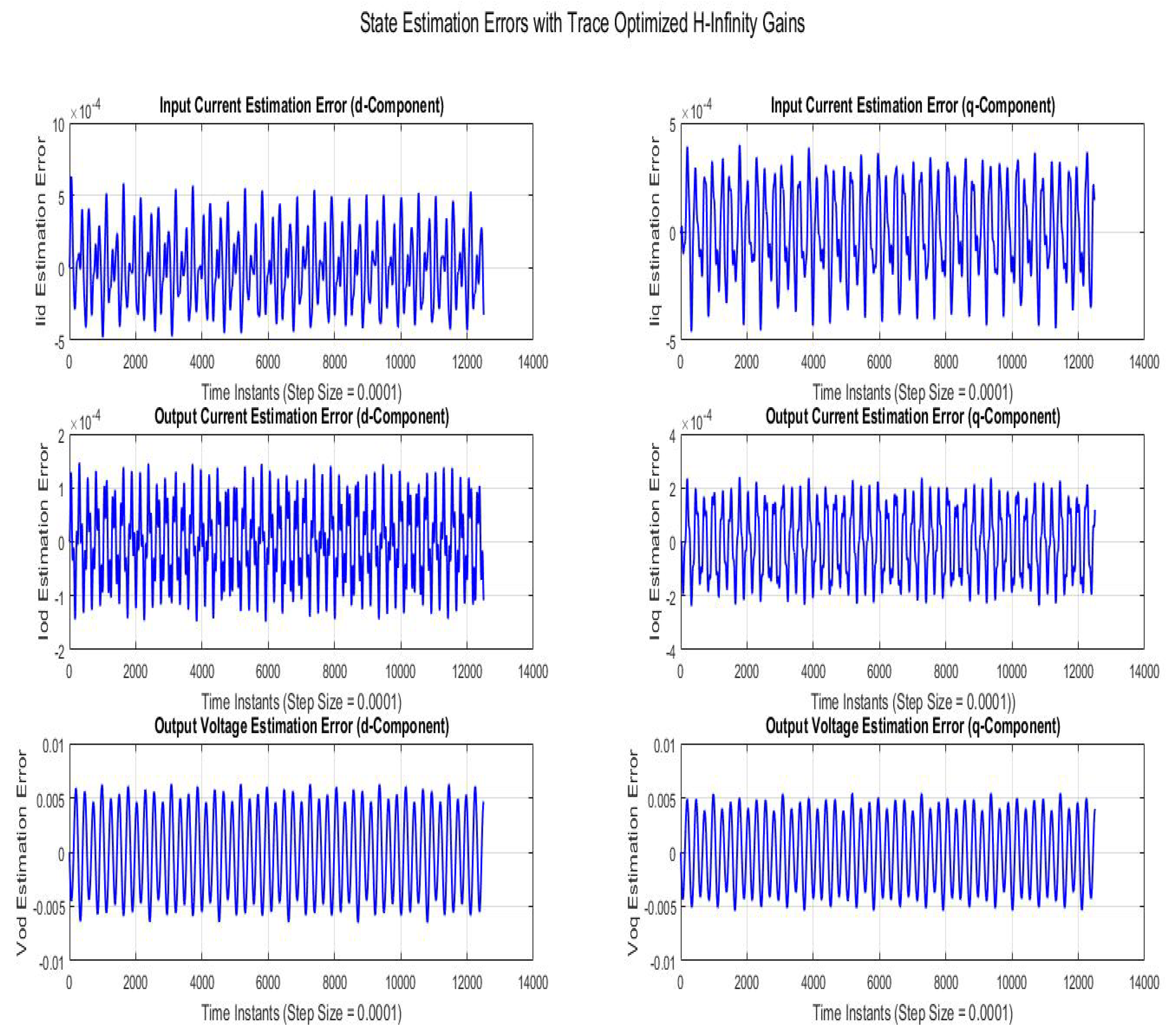
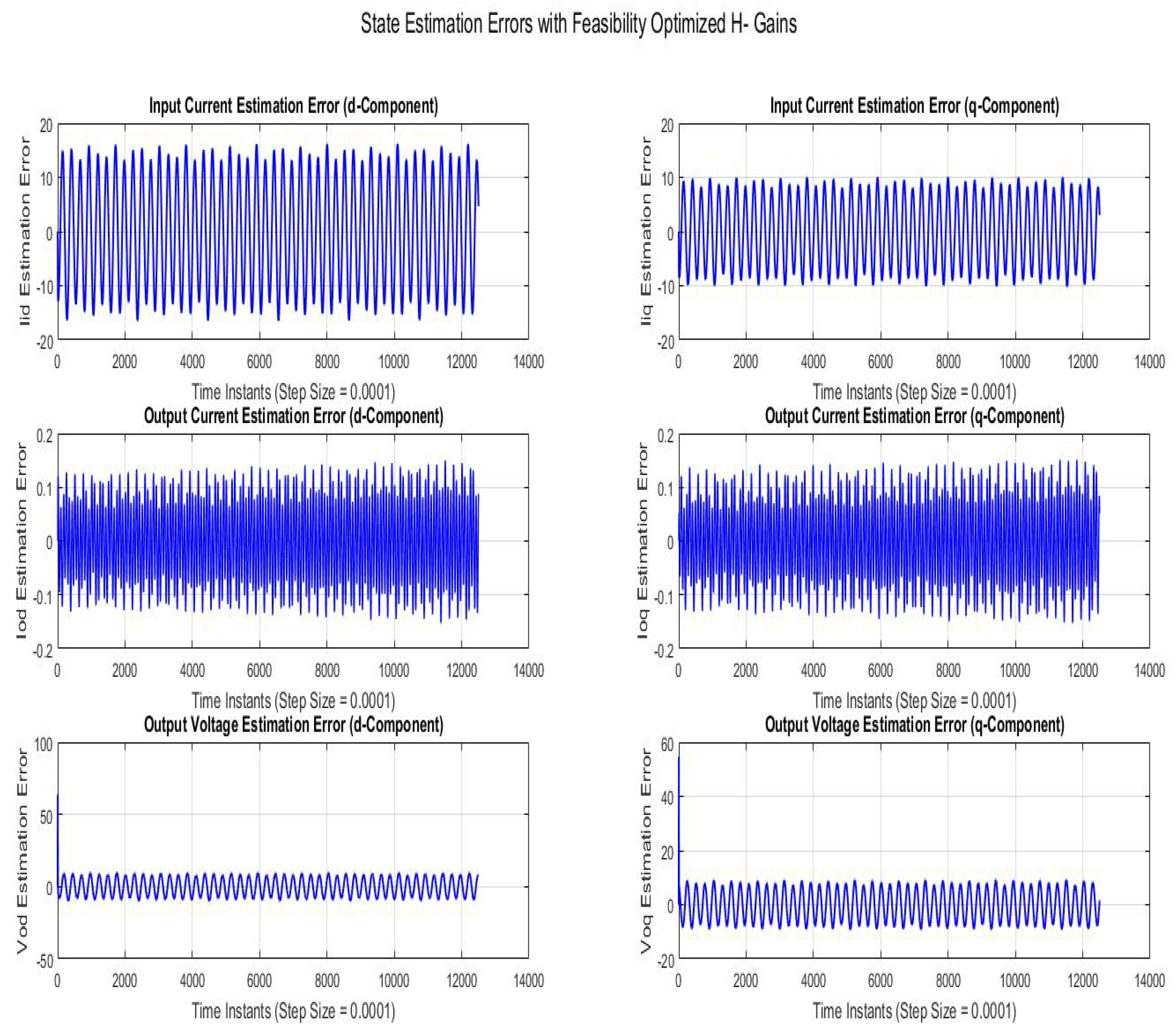
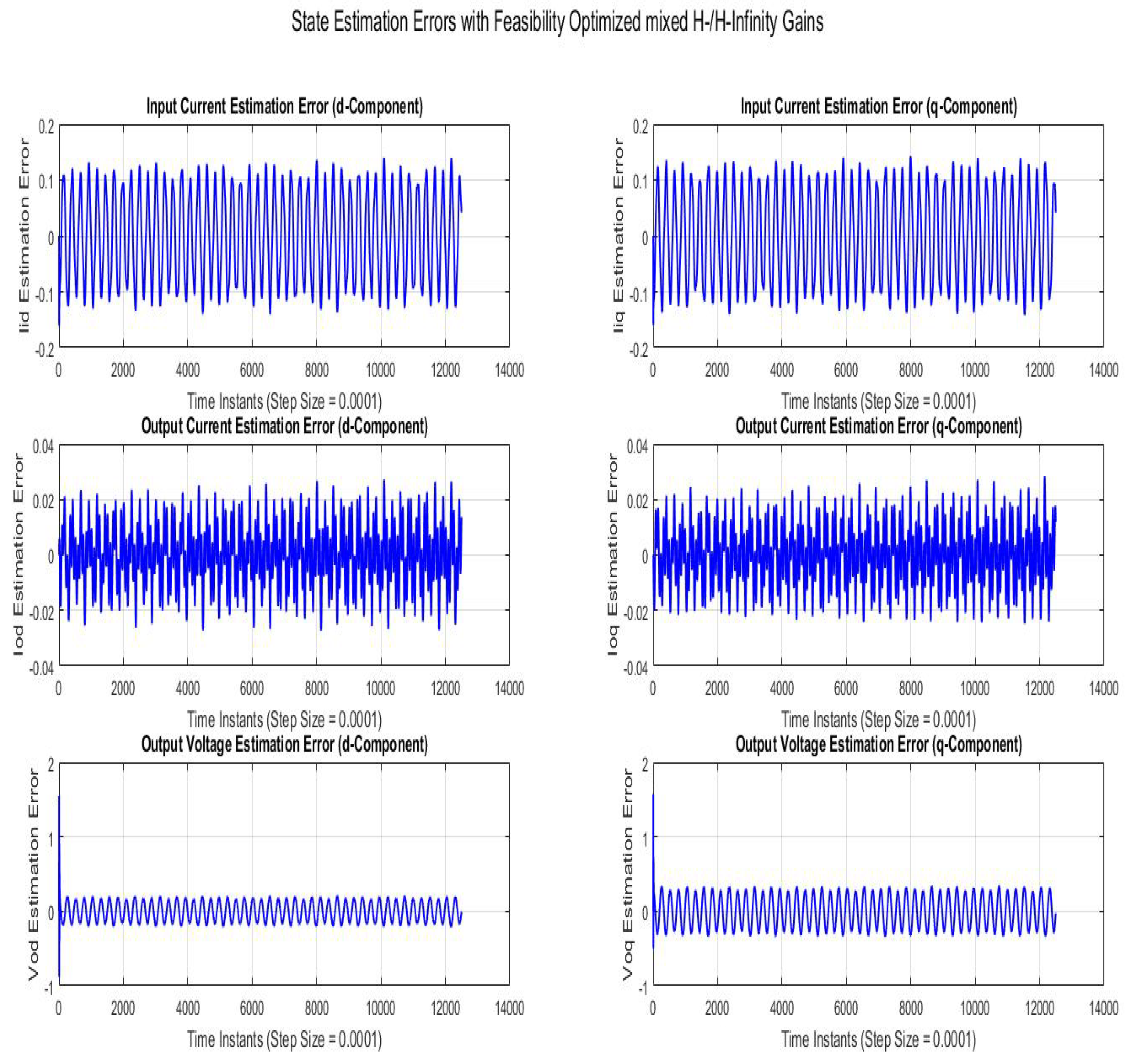
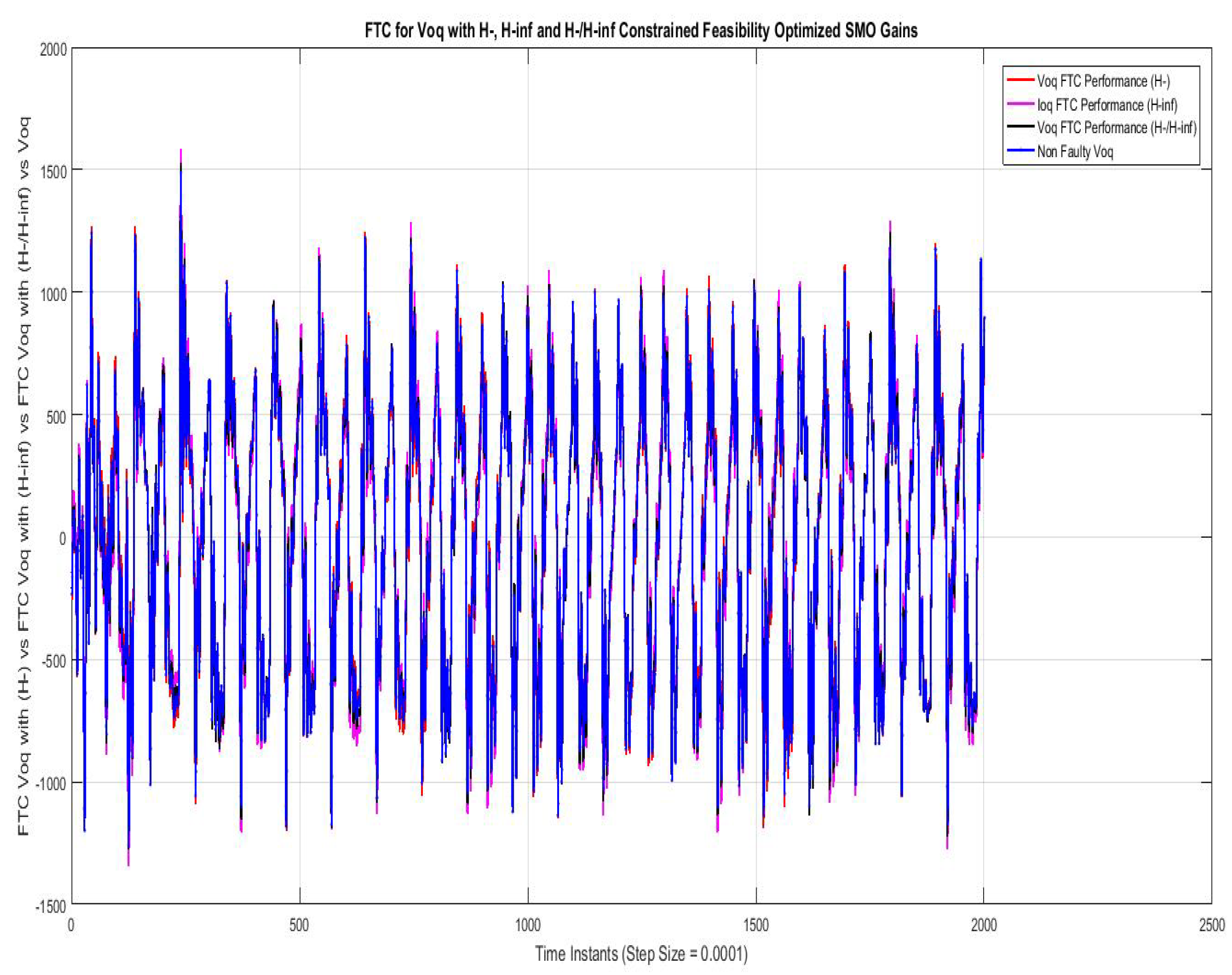
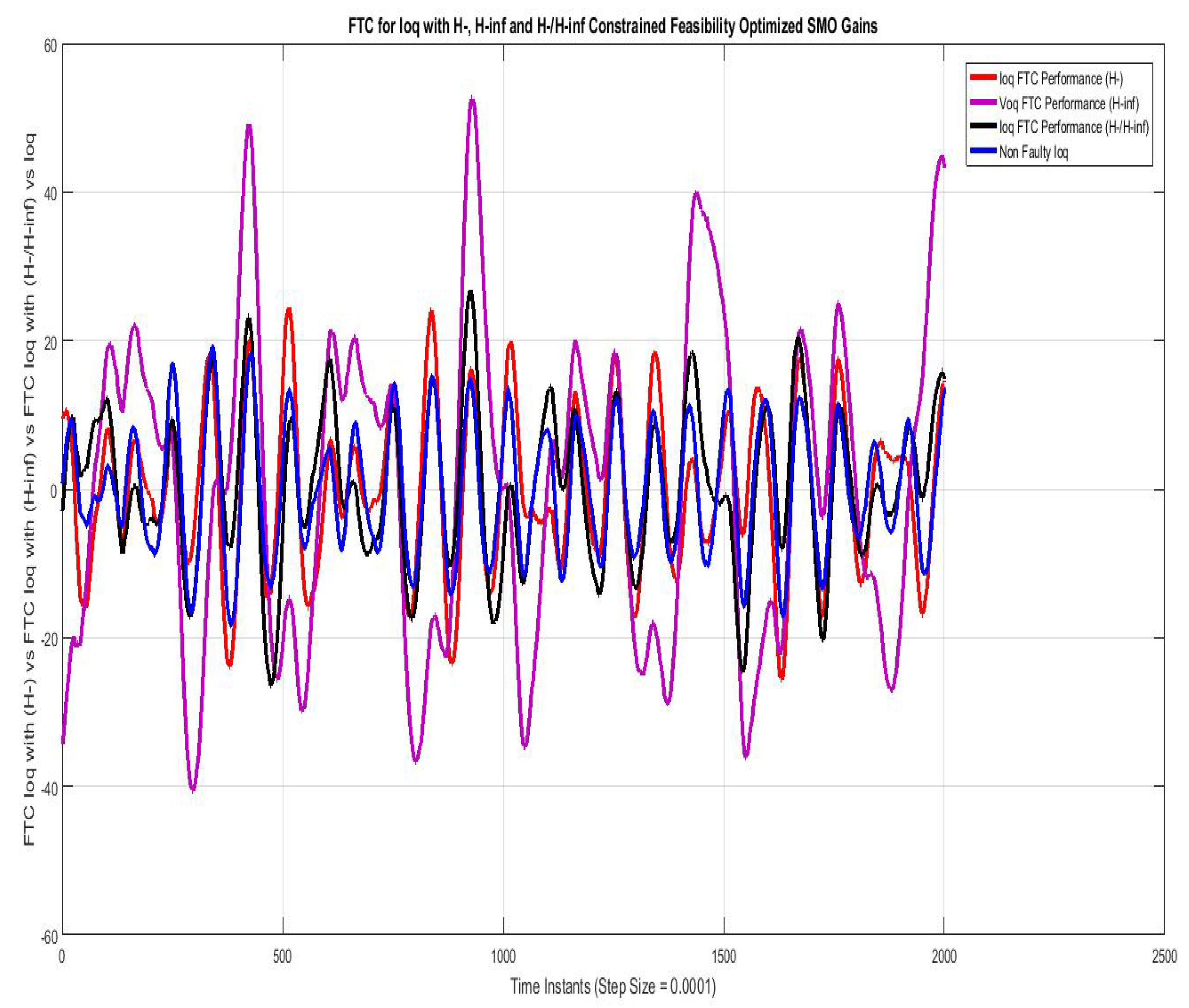
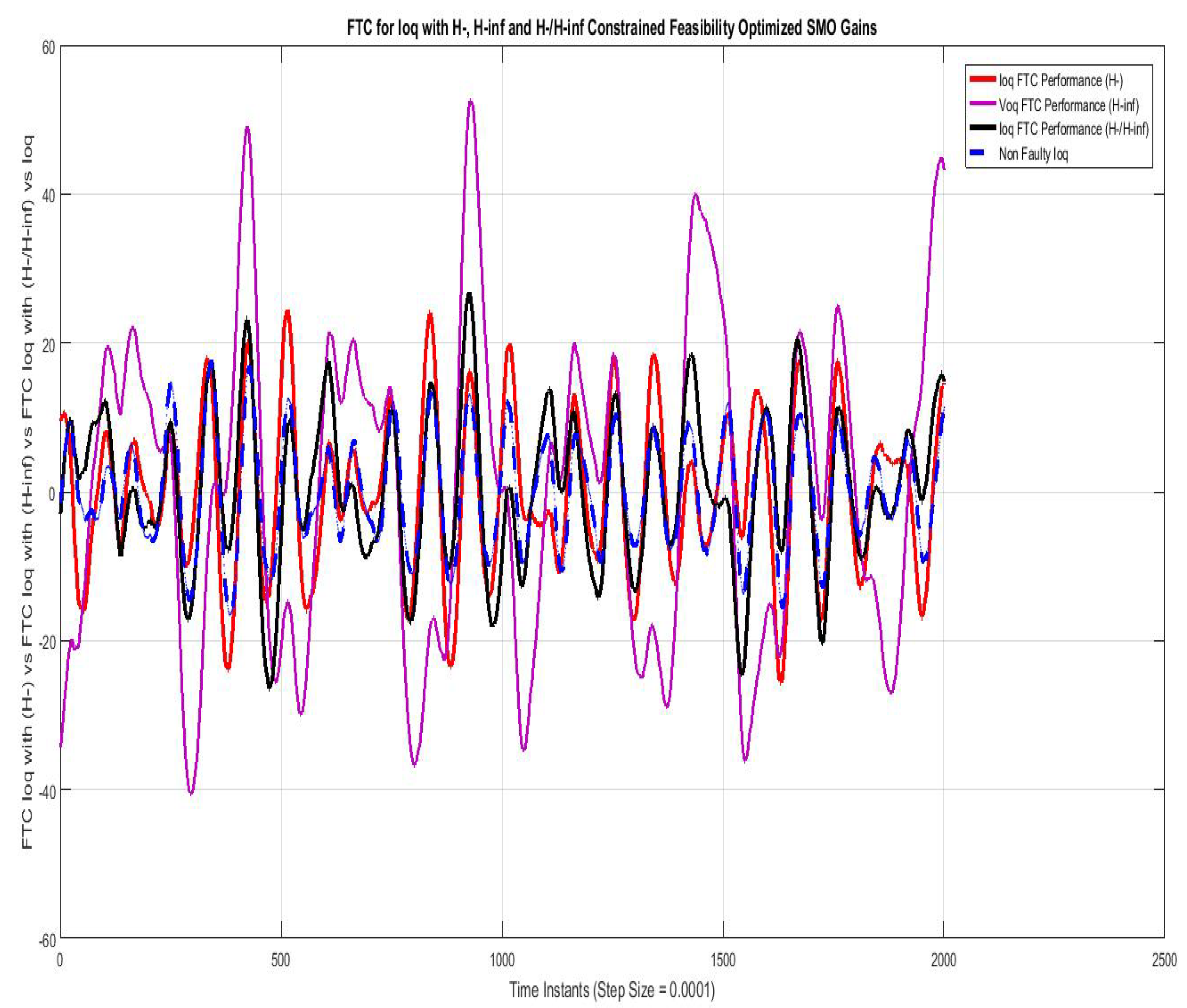
- The main results computed are estimations of current/volatge faults of sensors (C.T/P.T), current/volatge fault estimation errors, and fault tolerance performance by the control block , which is provided by the corrections performed according to the faults estimated by SMOs, which are (i) robust to disturbance, (ii) sensitive to faults, and (iii) compromised of both.Moreover, all of the above mentioned results are given and compared for SMOs with the above three constraints. The gain optimization is accordingly done in Theorems 1–3, which is the main contribution of this research along with the applicability to composite faults (phase, magnitude, harmonics) occurring in sensors (C.T/P.T) mounted on LCL filters on the inverter outputs;
- The future works are intended to enhance the work for several microgrids operating in parallel, by using the applied fault tolerant control schemes in the distributed control paradigm, while managing the optimized power flow control between them. Moreover, the deep learning techniques can be opted as a future work in this domain.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Robust Sliding Mode Observer | RSMO | Positive Definite | PD |
| Fault Diagnostics | FD | Fault Estimation | FE |
| Voltage Source Converter | VSC | Microgrid | MG |
| Current Transformer | C.T | Potential Transformer | P.T |
| Inductor Capacitor Inductor | LCL | Phase Locked Loop | PLL |
| Iterative Linear Matrix Inequalities | ILMI | Distributed Generators | DGs |
| Proportional Integral Differentiator | PID | Fault-Diagnostics-Isolation | FDI |
| Linear Quadratic Gaussian | LQG | Linear Quadratic Regulator | LQR |
| Linear Parameter Varying | LPV | Fault-Tolerant Control | FTC |
| Model Predictive Control | MPC | Linear Time Varying | LTV |
| False Alarm Ratio | FAR | False Detection Ratio | FDR |
| Bi-linear Matrix Inequality | BMI | Non-linear Matrix Inequality | NMI |
| Space Vector Pulse Width Modulation | SVPWM | Photo-Voltaic | PV |
| Hamilton–Jacobi–Isaacs-Equation | HJIE | Linear Time Varying | LTI |
| Sliding Mode Control | SMC | Infemum/Supremum | inf/sup |
| Discontinuous SMO Term | Discontinuous term gain | ||
| H -Infinity Coefficient | Fault | ||
| Fault upper bound | Disturbance upper bound | ||
| H - Coefficient | Input Vector | ||
| Estimated fault Scaling factor | H -Infinity Norm | ||
| Grid Voltage Vector | Augmented Input Vector | ||
| Sensor Outputs Vector | Augmented Estimation Vector | ||
| Stable Filtered Output Vector | Sate Estimation Vector | ||
| SMO Luenberger Gain | SMO Gain of switched term | ||
| Residual Signal | Scaled Residual Signal | ||
| Lyapunov Functions | , | Robust Control Cost Function | |
| Output Estimation Error | State Estimation Error | ||
| Hamiltonian | Sliding Mode Reachability Time | ||
| H - Norm | H Infinity Norm |
Appendix A. [
Appendix A.1. The Schur Lemma
Appendix A.2. Schur Complement
Appendix A.3. Proof for Hamilton–Jacobi–Bellman Equation/Motivation for Using the HJBE Equation
Appendix A.4. LMIs and Solvers
Appendix A.5. Supporting Lemmas
Appendix A.6. Definitions
Appendix A.7. Clark, Park, and abc-dq0 Transformation
References
- Hou, M.; Patton, R.J. An LMI approach to H -/H∞ fault detection observers. In Proceedings of the UKACC International Conference on Control. Control ‘96, Exeter, UK, 2–5 September 1996; Volume 96, pp. 305–310. [Google Scholar]
- Hammouri, H.; Kinnaert, M.; El Yaagoubi, E. Observer-based approach to fault detection and isolation for nonlinear systems. IEEE Trans. Autom. Control. 1999, 44, 1879–1884. [Google Scholar] [CrossRef]
- Edelmayer, A.; Bokor, J. Optimal H∞ scaling for sensitivity optimization of detection filters. Int. J. Robust Nonlinear Control. -Ifac-Affil. J. 2002, 12, 749–760. [Google Scholar] [CrossRef]
- Zhang, X.; Polycarpou, M.M.; Parisini, T. A robust detection and isolation scheme for abrupt and incipient faults in nonlinear systems. IEEE Trans. Autom. Control. 2002, 47, 576–593. [Google Scholar] [CrossRef]
- Liu, J.; Wang, J.L.; Yang, G.H. An LMI approach to worst case analysis for fault detection observers. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 4, pp. 2985–2990. [Google Scholar]
- Maciejowski, J.M.; Jones, C.N. MPC fault-tolerant flight control case study: Flight 1862. Ifac Proc. Vol. 2003, 36, 119–124. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.G.; Edwards, C. Robust sliding mode observer-based actuator fault detection and isolation for a class of nonlinear systems. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 987–992. [Google Scholar]
- Liu, J.; Wang, J.L.; Yang, G.H. An LMI approach to minimum sensitivity analysis with application to fault detection. Automatica 2005, 41, 1995–2004. [Google Scholar] [CrossRef]
- Edwards, C.; Tan, C.P. Sensor fault tolerant control using sliding mode observers. Control. Eng. Pract. 2006, 14, 897–908. [Google Scholar] [CrossRef]
- Tan, C.P.; Edwards, C. Sliding mode observers for detection and reconstruction of sensor faults. Automatica 2002, 38, 1815–1821. [Google Scholar] [CrossRef]
- Yan, X.G.; Edwards, C. Nonlinear robust fault reconstruction and estimation using a sliding mode observer. Automatica 2007, 43, 1605–1614. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Lam, J. Robust fault detection observer design: Iterative LMI approaches. J. Dyn. Sys., Meas., Control. 2007, 129, 77–82. [Google Scholar] [CrossRef]
- Wang, J.L.; Yang, G.H.; Liu, J. An LMI approach to H -index and mixed H -/H∞ fault detection observer design. Automatica 2007, 43, 1657–1665. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Lam, J. Worst-case fault detection observer design: Optimization approach. J. Optim. Theory Appl. 2007, 132, 475–491. [Google Scholar] [CrossRef]
- Pertew, A.M.; Marquez, H.J.; Zhao, Q. LMI-based sensor fault diagnosis for nonlinear Lipschitz systems. Automatica 2007, 43, 1464–1469. [Google Scholar] [CrossRef]
- Ding, S.X.; Khan, A.Q.; Wang, Y.; Abid, M. A Note on Unknown Input Fault Detection Filter Design. Ifac Proc. Vol. 2008, 41, 5523–5528. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Ding, S.X. An integrated trade-off design of observer based fault detection systems. Automatica 2008, 44, 1886–1894. [Google Scholar] [CrossRef]
- Khan, A.Q.; Ding, S.X. Threshold computation for robust fault detection in a class of continuous-time nonlinear systems. In Proceedings of the 2009 European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009; pp. 3088–3093. [Google Scholar]
- Alwi, H.; Edwards, C.; Tan, C.P. Sliding mode estimation schemes for incipient sensor faults. Automatica 2009, 45, 1679–1685. [Google Scholar] [CrossRef] [Green Version]
- Aliyu, M.; Boukas, E. Discrete-time mixed H2/H∞ nonlinear filtering. Int. J. Robust Nonlinear Control. 2011, 21, 1257–1282. [Google Scholar] [CrossRef]
- Dhahri, S.; Sellami, A.; others. Robust sliding mode observer design for a class of uncertain linear systems with fault reconstruction synthesis. Int. J. Phys. Sci. 2012, 7, 1259–1269. [Google Scholar]
- Li, W.; Zhu, Z.; Zhou, G.; Chen, G. Optimal H i/H∞ fault-detection filter design for uncertain linear time-invariant systems: An iterative linear matrix inequality approach. Iet Control. Theory Appl. 2013, 7, 1160–1167. [Google Scholar] [CrossRef]
- Shi, Y.T.; Kou, Q.; Sun, D.H.; Li, Z.X.; Qiao, S.J.; Hou, Y.J. H∞ fault tolerant control of WECS based on the PWA model. Energies 2014, 7, 1750–1769. [Google Scholar] [CrossRef] [Green Version]
- Raza, M.T.; Khan, A.Q.; Mustafa, G.; Abid, M. Design of fault detection and isolation filter for switched control systems under asynchronous switching. IEEE Trans. Control. Syst. Technol. 2015, 24, 13–23. [Google Scholar] [CrossRef]
- Ahmad, S.; Ali, N.; Ayaz, M.; Ahmad, E. Design of robust fault detection filter using algorithm for a class of LTI systems. In Proceedings of the 2017 13th International Conference on Emerging Technologies (ICET), Islamabad, Pakistan, 27–28 December 2017; pp. 1–5. [Google Scholar]
- Ning, Z.; Yu, J.; Wang, T. H _/H∞ fault detection filter design for discrete-time stochastic systems with limited communication. Trans. Inst. Meas. Control. 2019, 41, 3808–3817. [Google Scholar] [CrossRef]
- Abid, M. Fault Detection in Nonlinear Systems: An Observer-Based Approach; Universitat Duisburg-Essen: Duisburg, Germany, 2010. [Google Scholar]
- Chen, W. Fault Detection and Isolation in Nonlinear Systems: Observer And Energy-Balance Based Approaches; Universitat Duisburg-Essen: Duisburg, Germany, 2012. [Google Scholar]
- Qayyum Khan, A. Observer-Based Fault Detection in Nonlinear Systems. Ph.D. Thesis, Institute of Automatic Control and Complex Systems, Beijing, China, 2010. [Google Scholar]
- Raza, M.T. Fault Diagnosis and Fault Tolerant Control of Switched Dynamical Systems. Ph.D. Thesis, Pakistan Institute of Engineering and Applied Sciences, Nilore, Islamabad, Pakistan, 2016. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: Berlin/Heidelberg, Germany, 2014; Volume 10. [Google Scholar]
- Shahzad, E.; Khan, A.U.; Iqbal, M.; Saeed, A.; Waseem, A.; Hafeez, G.; Albogamy, F.R. Sensor Fault-Tolerant-Control of Microgrid using Robust Sliding Mode Observers. Sensors 2021, Submitted.
- Prochazka, M. Modeling of Current Transformers Under Saturation Conditions. Adv. Electr. Electron. Eng. 2011, 5, 94–97. [Google Scholar]
- Matussek, R.; Dzienis, C.; Blumschein, J.; Schulte, H. Current transformer model with hysteresis for improving the protection response in electrical transmission systems. J. Phys. Conf. Ser. 2014, 570, 062001. [Google Scholar] [CrossRef] [Green Version]
- Muthumuni, D.; Ruchkall, L.; Jayasinghe, R. Modeling current transformer (CT) saturation for detailed protection studies. Pulse Manit. HVDC Res. Centre J. 2011, 1–5. [Google Scholar]
- Gholami, S.; Saha, S.; Aldeen, M. Sensor fault tolerant control of microgrid. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. An accurate small-signal model of inverter-dominated islanded microgrids using dq reference frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1070–1080. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Optimization and Control Problems; Springer Science & Business Media: Berlin, Germany, 1992; Available online: https://link.springer.com/book/10.1007/978-3-642-84379-2 (accessed on 24 December 2021).
- Edwards, C.; Spurgeon, S.K. On the development of discontinuous observers. Int. J. Control. 1994, 59, 1211–1229. [Google Scholar] [CrossRef]
- Tan, C.P.; Edwards, C. An LMI approach for designing sliding mode observers. Int. J. Control. 2001, 74, 1559–1568. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 600 V | 600 V | ||||
| mH | mH | mH | |||
| mH | mH | mH | |||
| F | F | F | |||
| rad/s | 377 rad/s | 377 rad/s | |||
| 85 V | rad/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahzad, E.; Khan, A.U.; Iqbal, M.; Albalawi, F.; Khan, M.A.; Saeed, A.; Ghoneim, S.S.M. Fault Diagnostics and Tolerance Analysis of a Microgrid System Using Hamilton–Jacobi–Isaacs Equation and Game Theoretic Estimations in Sliding Mode Observers. Sensors 2022, 22, 1597. https://doi.org/10.3390/s22041597
Shahzad E, Khan AU, Iqbal M, Albalawi F, Khan MA, Saeed A, Ghoneim SSM. Fault Diagnostics and Tolerance Analysis of a Microgrid System Using Hamilton–Jacobi–Isaacs Equation and Game Theoretic Estimations in Sliding Mode Observers. Sensors. 2022; 22(4):1597. https://doi.org/10.3390/s22041597
Chicago/Turabian StyleShahzad, Ebrahim, Adnan Umar Khan, Muhammad Iqbal, Fahad Albalawi, Muhammad Attique Khan, Ahmad Saeed, and Sherif S. M. Ghoneim. 2022. "Fault Diagnostics and Tolerance Analysis of a Microgrid System Using Hamilton–Jacobi–Isaacs Equation and Game Theoretic Estimations in Sliding Mode Observers" Sensors 22, no. 4: 1597. https://doi.org/10.3390/s22041597
APA StyleShahzad, E., Khan, A. U., Iqbal, M., Albalawi, F., Khan, M. A., Saeed, A., & Ghoneim, S. S. M. (2022). Fault Diagnostics and Tolerance Analysis of a Microgrid System Using Hamilton–Jacobi–Isaacs Equation and Game Theoretic Estimations in Sliding Mode Observers. Sensors, 22(4), 1597. https://doi.org/10.3390/s22041597