
Resource Allocation in Uplink NOMA-IoT Based UAV for URLLC Applications




Abstract
:1. Introduction
- The uplink NOMA-based transmission system utilizing the UAV as a base station is modeled. Then, the resource allocation problem is formulated with the aim of maximizing the sum rate, taking into consideration the different delay requirements to serve URLLC applications.
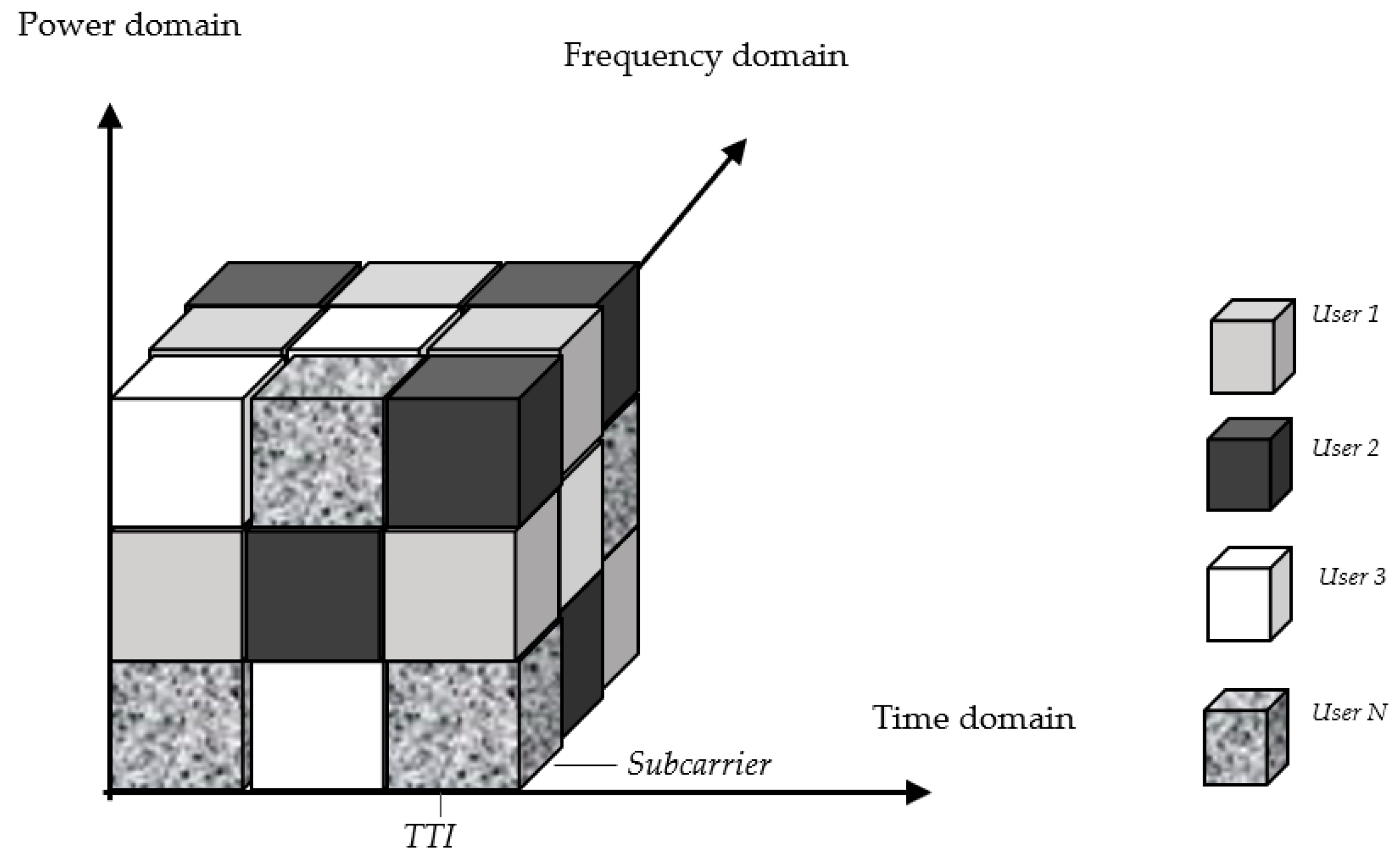
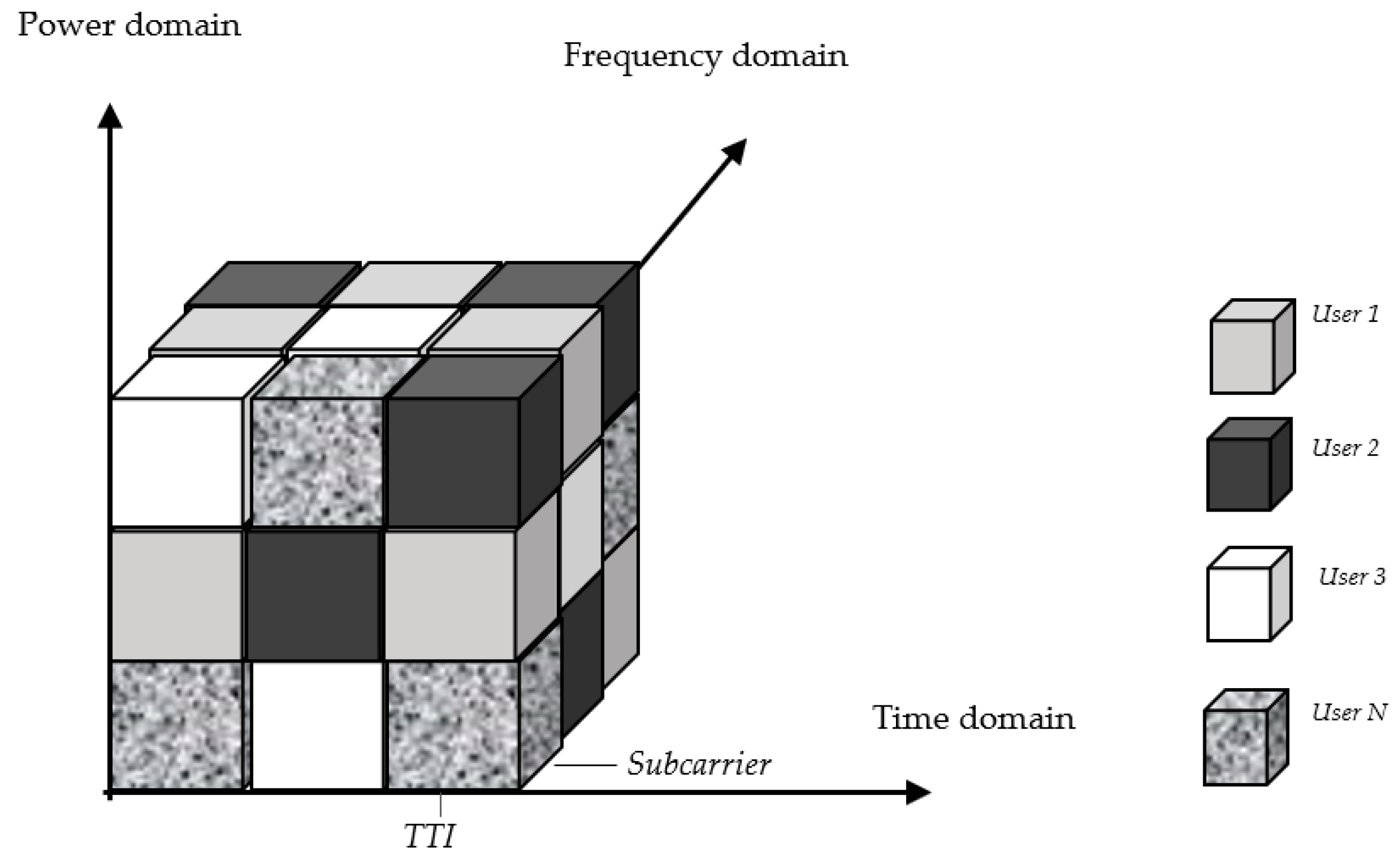
- The proposed scheduler allocates resources jointly in both time domain and frequency domain based on the IoT devices parameters. Delay limits and priority are used by time domain; then the buffer status report (BSR) and channel quality indicator (CQI) control the frequency domain scheduler decision to allocate resources. In addition, a power allocation scheme is proposed to achieve fairness between the users allocated the same RB regardless of the different channel conditions.
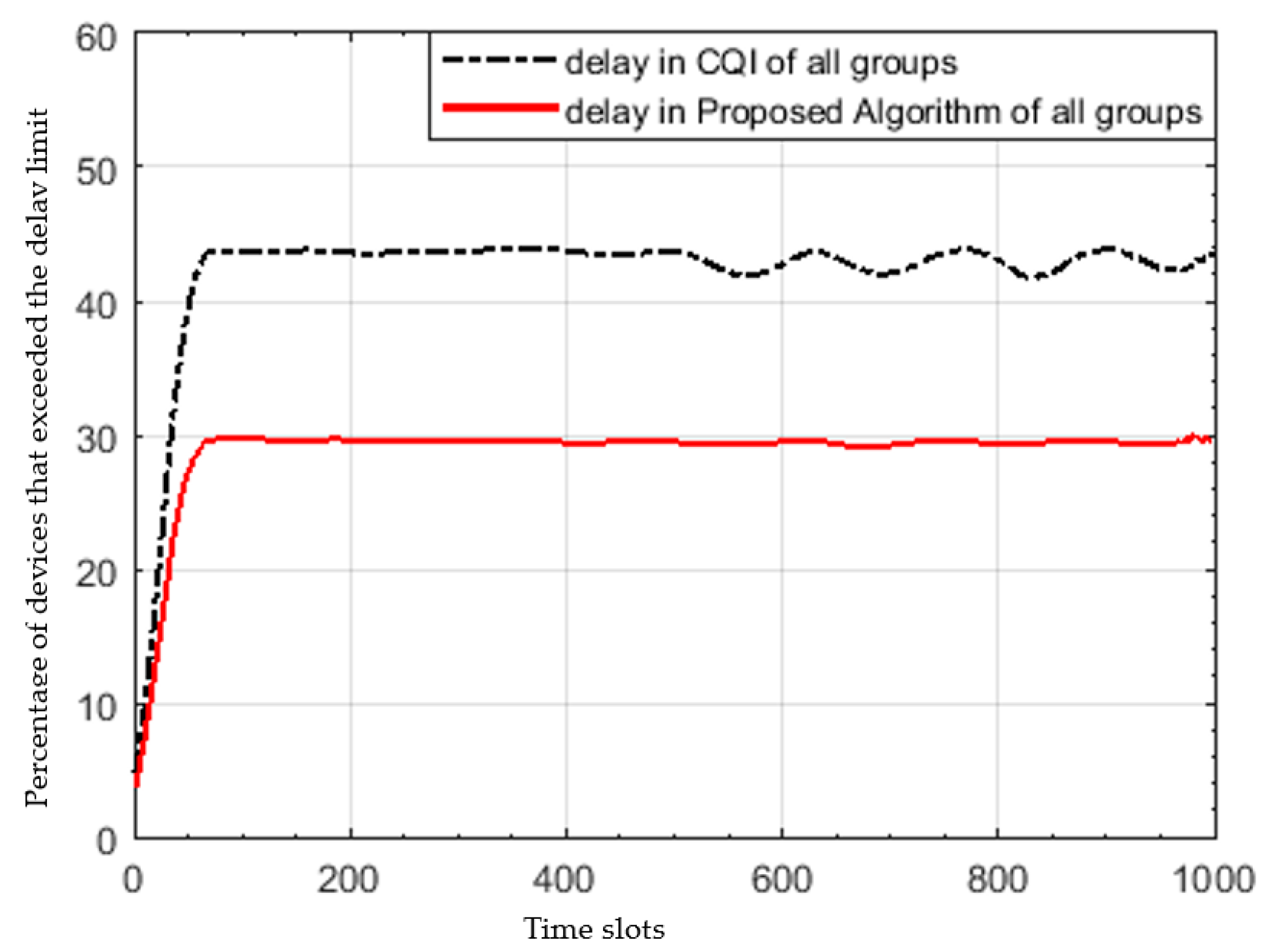
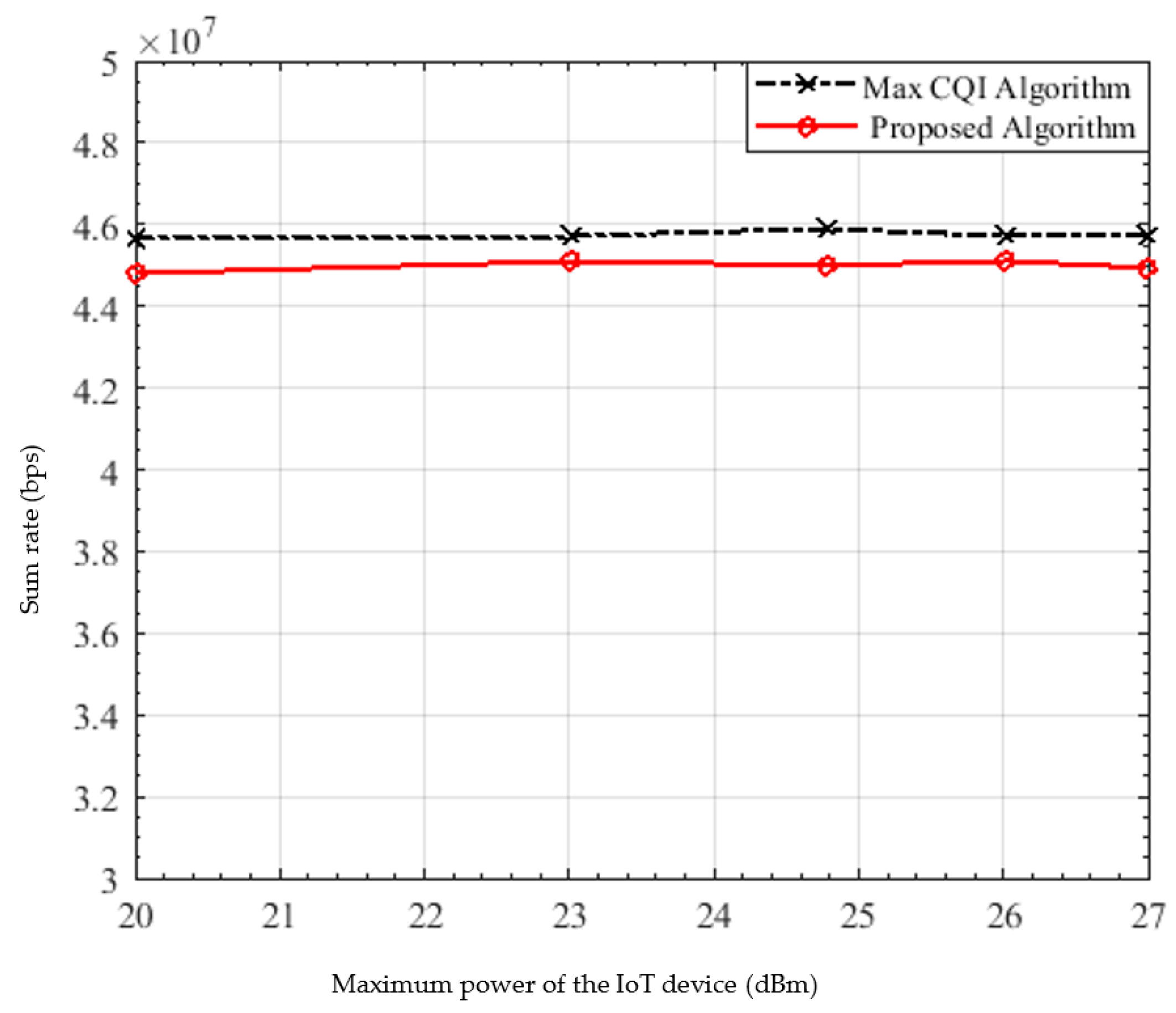
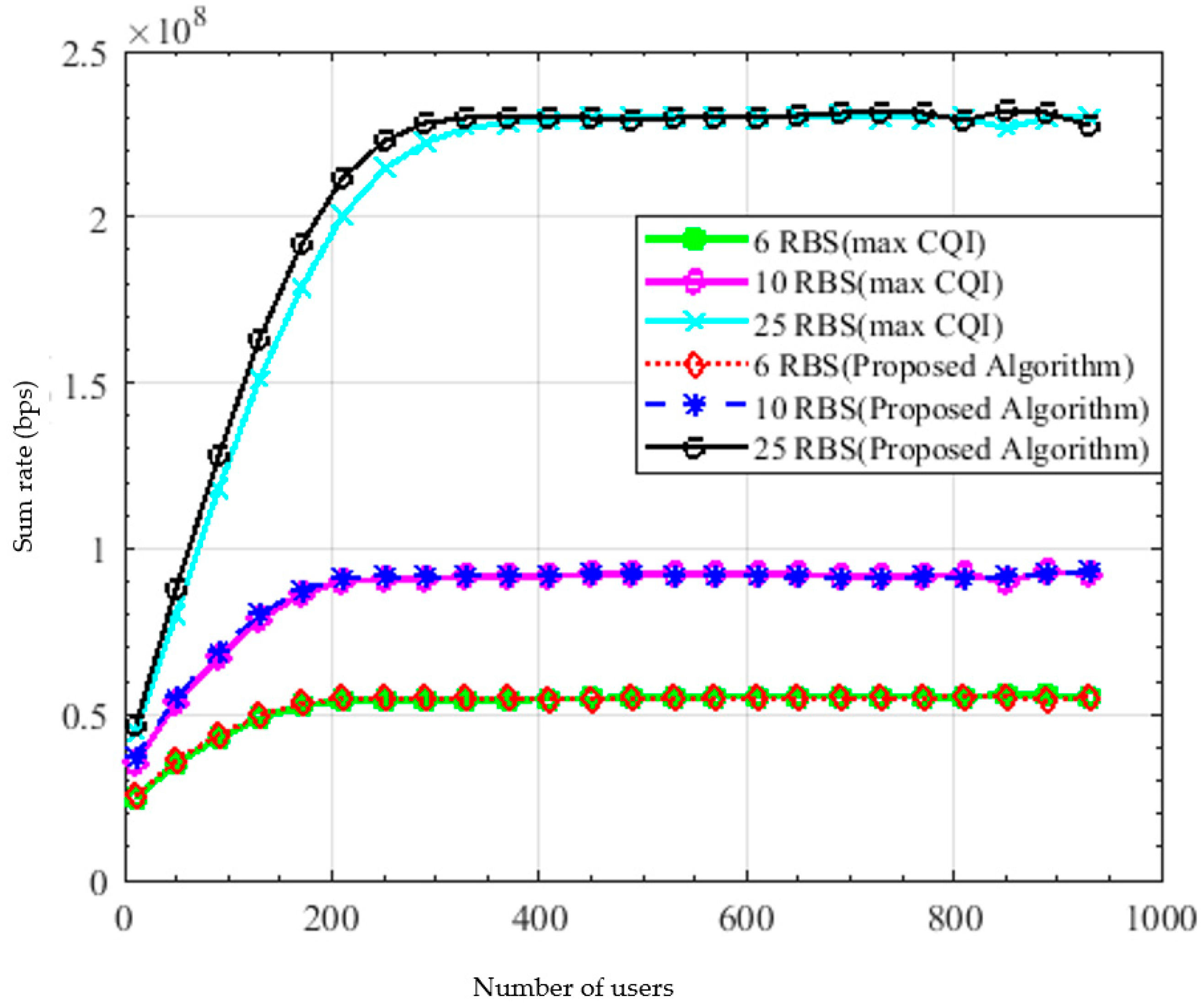
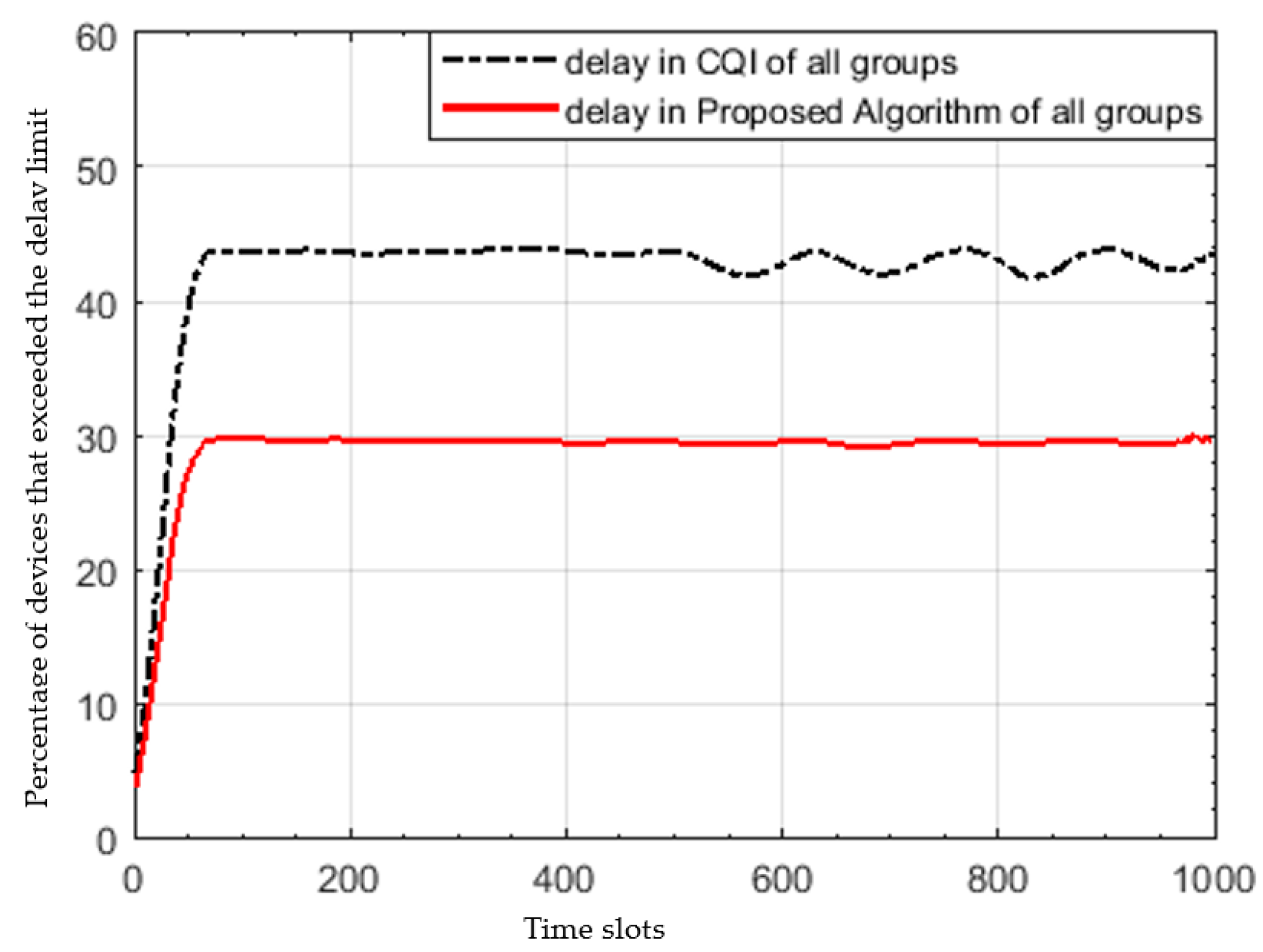
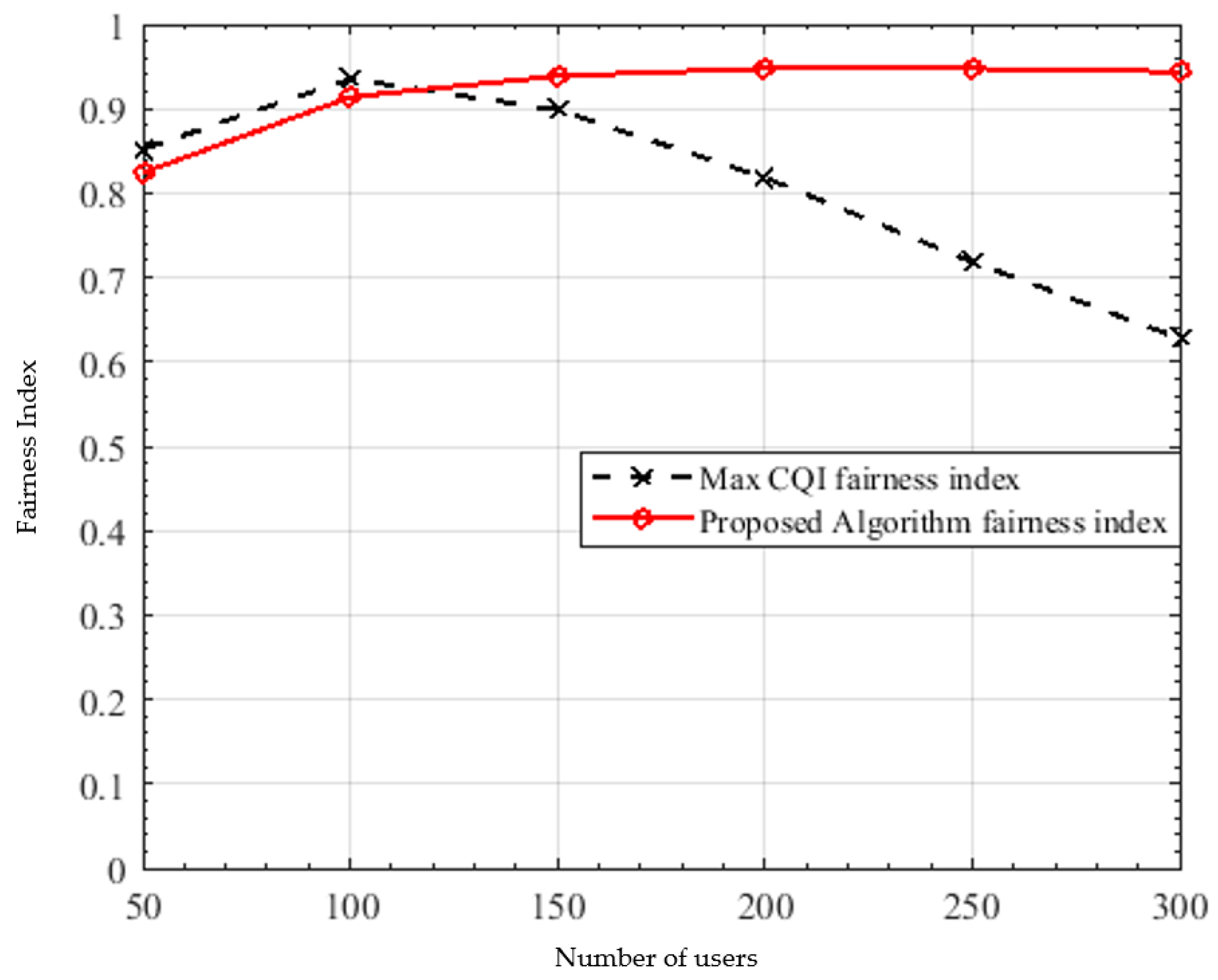
- Unlike the previous works, the novelty of the presented algorithm lies in its ability to consider both the strict delay requirements of IoT devices and the system throughput while ensuring high reliability and fairness, where simulations are performed to evaluate the proposed scheduling algorithm performance. The results demonstrate the effectiveness of the proposed algorithm to serve URLLC traffic with restricted delay limits, due to the significant enhancement in delay, reliability and fairness, in addition to maximizing the sum data rate and spectral efficiency while achieving the same system complexity when compared to the maximum channel quality indicator (max CQI) algorithm.
2. Related Works
3. System Model
4. Problem Formulation
5. Proposed Algorithm
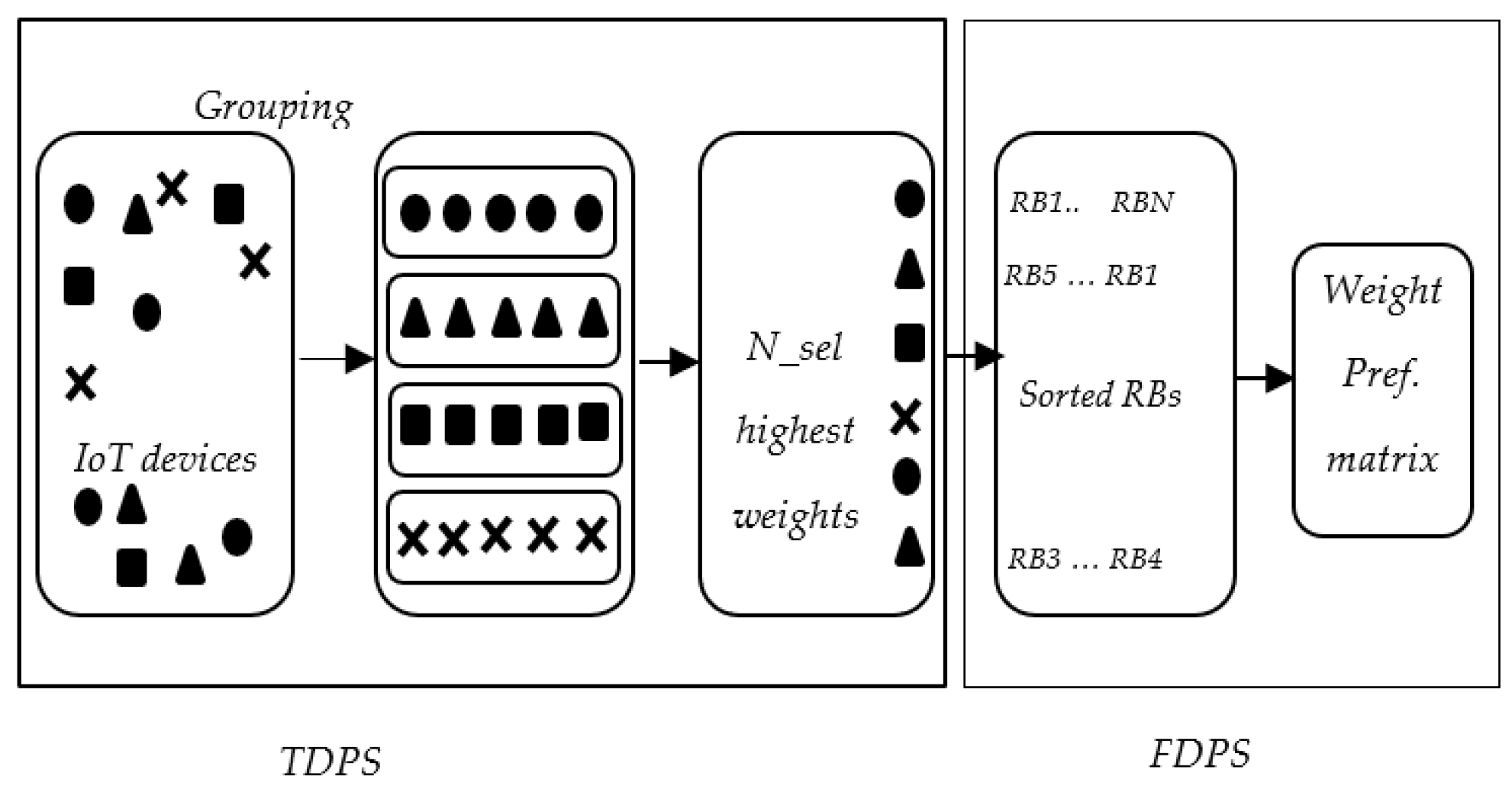
5.1. Time Domain Packet Scheduling (TDPS)
5.2. Frequency Domain Packet Scheduling (FDPS)
| Algorithm 1. Joint Delay-Rate Optimization Scheduler |
| Input: T, K, N, , , j, L |
| Output: |
| 1: Initialize: Nmax = L * K |
| 2: Step 1: chooses the Nmax devices with the highest metrics in TDPS. |
| 3: Arrange IoT devices in j groups according to the application type. |
| 4: For Ts = 1 to Ts = T do |
| 5: R = IoT devices send scheduling requests |
| 6: If R =< Nmax go to Label |
| 7: else, do |
| 8: For i = 1 to i = R do |
| 9: Compute the weight of device i (27): |
| 10: End for |
| 11: Arrange IoT devices of each group in descending order of the weight () |
| 12: Choose the N_max nodes which have the maximum weight to be scheduled in this TTI. |
| 13: Label: |
| Choose the R nodes to be scheduled in this TTI. |
| 14: End If |
| 15: N_sel = the selected nodes to be scheduled |
| 16: Step 2: assign each IoT device a resource block |
| 17: For i = 1 to i = N_sel do |
| 18: Form the preference matrix for each device i to all available RBs based on the CQI value. |
| 19: Form the objective function which is the weighted preference matrix . |
| 20: Initialize = 1, correspondingly set . |
| 21: if a solution can be found: update = , and . |
| 22: End for |
| 23: Delay of the scheduled nodes is cleared, but that of waiting nodes is incremented. |
| 24: Rejected nodes send scheduling requests in the next TTI. |
| 25: End For |
5.3. Power Allocation Algorithm
6. Simulation Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abrar, M.; Ajmal, U.; Almohaimeed, Z.M.; Gui, X.; Akram, R.; Masroor, R. Energy Efficient UAV-Enabled Mobile Edge Computing for IoT Devices: A Review. IEEE Access 2021, 9, 127779–127798. [Google Scholar] [CrossRef]
- Liu, X.; Ansari, N. Resource allocation in UAV-assisted M2M communications for disaster rescue. IEEE Wirel. Commun. Lett. 2018, 8, 580–583. [Google Scholar] [CrossRef]
- Bennis, M.; Debbah, M.; Poor, H.V. Ultrareliable and low-latency wireless communication: Tail, risk, and scale. Proc. IEEE 2018, 106, 1834–1853. [Google Scholar] [CrossRef] [Green Version]
- Duan, R.; Wang, J.; Jiang, C.; Yao, H.; Ren, Y.; Qian, Y. Resource Allocation for Multi-UAV Aided IoT NOMA Up-link Transmission Systems. IEEE Internet Things J. 2019, 6, 7025–7037. [Google Scholar] [CrossRef]
- Muteba, K.F.; Djouani, K.; Olwal, T.O. Deep Reinforcement Learning Based Resource Allocation For Narrowband Cognitive Radio-IoT Systems. Procedia Comput. Sci. 2020, 175, 315–324. [Google Scholar] [CrossRef]
- Zavyalova, D.; Drozdova, V. 5G Scheduling using Reinforcement Learning. In Proceedings of the 2020 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russia, 6–7 October 2020. [Google Scholar]
- Zhang, Y.; Wang, X.; Xu, Y. Energy-Efficient Resource Allocation in Uplink NOMA Systems with Deep Reinforcement Learning. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019. [Google Scholar]
- Al-Imari, M.; Xiao, P.; Imran, M.A.; Tafazolli, R. Uplink Non-Orthogonal Multiple Access for 5G Wireless Networks. In Proceedings of the 2014 11th International Symposium on Wireless Communications Systems (ISWCS), Barcelona, Spain, 26–29 August 2014. [Google Scholar]
- Ahsan, W.; Yi, W.; Qin, Z.; Liu, Y.; Nallanathan, A. Resource Allocation in Uplink NOMA-IoT Networks: A Reinforcement-Learning Approach. IEEE Trans. Wirel. Commun. 2021, 20, 5083–5098. [Google Scholar] [CrossRef]
- Segura, D.; Khatib, E.J.; Munilla, J.; Barco, R. 5G Numerologies Assessment for URLLC in Industrial Communications. Sensors 2021, 21, 2489. [Google Scholar] [CrossRef]
- Al-Imari, M.; Xiao, P.; Imran, M.A. Receiver and Resource Allocation Optimization for Uplink NOMA in 5G Wireless Networks. In Proceedings of the 2015 International Symposium on Wireless Communication Systems (ISWCS), Brussels, Belgium, 25–28 August 2015. [Google Scholar]
- Ruby, R.; Zhong, S.; Yang, H.; Wu, K. Enhanced Uplink Resource Allocation in Non-Orthogonal Multiple Access Systems. IEEE Trans. Wirel. Commun. 2017, 17, 1432–1444. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhang, H.; Long, K.; Choi, S.; Nallanath, A. Resource Allocation for Optimizing Energy Efficiency in NOMA-based Fog UAV Wireless Networks. IEEE Netw. 2019, 34, 158–163. [Google Scholar] [CrossRef]
- Wang, J.Y.; Ma, Y.; Lu, R.R.; Wang, J.B.; Lin, M.; Cheng, J. Hovering UAV-based FSO communications: Channel modeling, performance analysis, and parameter optimization. IEEE J. Sel. Areas Commun. 2021, 39, 2946–2959. [Google Scholar] [CrossRef]
- Azari, M.; Geraci, G.; Garcia-Rodriguez, A.; Pollin, S. UAV-to-UAV Communications in Cellular Networks. IEEE Trans. Wirel. Commun. 2020, 19, 6130–6144. [Google Scholar] [CrossRef]
- Yang, G.; Dai, R.; Liang, Y. Energy-efficient UAV backscatter communication with joint trajectory and resource optimization. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019. [Google Scholar]
- Doğan, S.; Tusha, A.; Arslan, H. NOMA with Index Modulation for Uplink URLLC Through Grant-Free Access. IEEE J. Sel. Top. Signal Process. 2019, 13, 1249–1257. [Google Scholar] [CrossRef]
- Jaya, N.I.; Hossain, M.F. RAN Resource Slicing and Sharing with NOMA for Latency Reduction in Uplink URLLC Networks. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Seoul, Korea, 6–9 April 2020. [Google Scholar]
- Deng, H.; Luo, F.; Li, Q. A Hybrid Resource Allocation Method for URLLC Based on NOMA. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021. [Google Scholar]
- Holis, J.; Pechac, P. Elevation dependent shadowing model for mobile communications via high altitude platforms in built-up areas. IEEE Trans. Antennas Propag. 2008, 56, 1078–1084. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, W.; Zheng, G. Optimum Placement of UAV as Relays. IEEE Commun. Lett. 2017, 22, 248–251. [Google Scholar] [CrossRef] [Green Version]
- 3GPP Standard RP-020316; Agreed CRs (Rel-5) for the WI of High Speed Downlink Packet Access—Physical Layer (Part 1). 3GPP TSG-RAN WG1 Publisher: Marco Island, FL, USA, 2002; pp. 87–91.
- Polyanskiy, Y.; Poor, H.V.; Verdú, S. Channel Coding Rate in the Finite Blocklength Regime. IEEE Trans. Inf. Theory 2010, 56, 2307–2359. [Google Scholar] [CrossRef]
- Ren, H.; Pan, C.; Deng, Y.; Elkashlan, M.; Nallanathan, A. Joint Power and Blocklength Optimization for URLLC in a Factory Automation Scenario. IEEE Trans. Wirel. Commun. 2020, 19, 1786–1801. [Google Scholar] [CrossRef] [Green Version]
- Bertsekas, D.P.; Gallager, R.G. Delay Models in Data Networks. In Data Networks, 2nd ed.; Athena Scientific: Belmont, MA, USA, 2021; pp. 162–163. [Google Scholar]
- Garg, K.; Sharma, U. Improving Service Quality of Dhaba with the Help of Queuing Theory. J. Manuf. Eng. 2021, 16, 82–86. [Google Scholar]
- Wang, H.; Wang, J.; Ding, G.; Wang, L.; Tsiftsis, T.A.; Sharma, P.K. Resource Allocation for Energy Harvesting-Powered D2D Communication Underlaying UAV-Assisted Networks. IEEE Trans. Green Commun. Netw. 2017, 2, 14–24. [Google Scholar] [CrossRef]
- Lin, X.; Li, J.; Baldemair, R.; Cheng, J.F.T.; Parkvall, S.; Larsson, D.C.; Koorapaty, H.; Frenne, M.; Falahati, S.; Grovlen, A.; et al. 5G new radio: Unveiling the essentials of the next generation wireless access technology. IEEE Commun. Stand. Mag. 2019, 3, 30–37. [Google Scholar] [CrossRef] [Green Version]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Alzenad, M.; El-Keyi, A.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station for Maximum coverage of users with different QoS requirements. IEEE Wirel. Commun. Lett. 2017, 7, 38–41. [Google Scholar] [CrossRef] [Green Version]
- Reyhani, A.; Song, S.; Primak, S.L.; Shami, A. Heterogeneous Delay-Power Resource Allocation in Uplink LTE. In Proceedings of the 6th Joint IFIP Wireless and Mobile Networking Conference (WMNC), Dubai, United Arab Emirates, 20–22 October 2013. [Google Scholar]
- Mehaseb, M.A.; Gadallah, Y.; Elhamy, A.; Elhennawy, H. Classification of LTE uplink scheduling techniques: An M2M perspective. IEEE Commun. Surv. Tutor. 2015, 18, 1310–1335. [Google Scholar] [CrossRef]
- Beschastnyi, V.; Ostrikova, D.; Melnikov, S.; Gaidamaka, Y. Modelling Multi-connectivity in 5G NR Systems with Mixed Unicast and Multicast Traffic. In Proceedings of the International Conference on Distributed Computer and Communication Networks, Moscow, Russia, 14–18 September 2020. [Google Scholar]
- Lee, H. Power Allocation Scheme to Achieve Fair User Data Rates in NOMA Systems. In Proceedings of the 2019 34th International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC), Jeju, Korea, 23–26 June 2019. [Google Scholar]
- Ashfaq, K.; Safdar, G.A.; Ur-Rehman, M. Comparative analysis of scheduling algorithms for radio resource allocation in future communication networks. PeerJ Comput. Sci. 2021, 7, e546. [Google Scholar] [CrossRef] [PubMed]
- Zhai, D.; Zhang, R. Joint admission control and resource allocation for multi-carrier uplink NOMA networks. IEEE Wirel. Commun. Lett. 2018, 7, 922–925. [Google Scholar] [CrossRef]
- Mohsenivatani, M.; Liu, Y.; Derakhshani, M.; Parsaeefard, S.; Lambotharan, S. Completion-Time-Driven Scheduling for Uplink NOMA-Enabled Wireless Networks. IEEE Commun. Lett. 2020, 24, 1775–1779. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment | |
|---|---|
| Suburban | 20.34° |
| Urban | 42.44° |
| Dense urban | 54.62° |
| High-rise urban | 75.52° |
| Symbol | Description | Value |
|---|---|---|
| a | Environment Constant | 4.88 |
| b | Environment Constant | 0.43 |
| Line of sight Environment Constant | 0.1 | |
| Non-Line of sight Environment Constant | 21 | |
| Optimal elevation angle | ||
| Noise power density | −174 | |
| U | Number of UAVs | 1 |
| IoT device minimum power | 100 mW–20 dBm | |
| IoT device maximum power | 500 mW–27 dBm | |
| Radius of the cell | 1 km | |
| TTI | Time slot | 1 ms |
| Simulation time | 1 s | |
| Maximum delay limit | {10,20,30,40} ms | |
| Arrival rate per group | {100,250,600,400} (packets/s) | |
| N | Total number of devices | 300 |
| D | Packet size | 100 bits |
| m | Channel blocklength | 100 symbols |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karem, R.; Ahmed, M.; Newagy, F. Resource Allocation in Uplink NOMA-IoT Based UAV for URLLC Applications. Sensors 2022, 22, 1566. https://doi.org/10.3390/s22041566
Karem R, Ahmed M, Newagy F. Resource Allocation in Uplink NOMA-IoT Based UAV for URLLC Applications. Sensors. 2022; 22(4):1566. https://doi.org/10.3390/s22041566
Chicago/Turabian StyleKarem, Rana, Mehaseb Ahmed, and Fatma Newagy. 2022. "Resource Allocation in Uplink NOMA-IoT Based UAV for URLLC Applications" Sensors 22, no. 4: 1566. https://doi.org/10.3390/s22041566
APA StyleKarem, R., Ahmed, M., & Newagy, F. (2022). Resource Allocation in Uplink NOMA-IoT Based UAV for URLLC Applications. Sensors, 22(4), 1566. https://doi.org/10.3390/s22041566