
Rainfall Map from Attenuation Data Fusion of Satellite Broadcast and Commercial Microwave Links



Abstract
1. Introduction
- We consider the virga phenomenon, i.e., a variation of rainfall rate with respect to the height due to a gradient of environmental parameters such as humidity, which may cause evaporation or sublimation of rain [22];
- We numerically show that the root mean square estimation error steadily decreases at each step of the iterative procedure, thus leading to a stable solution for the rainfall intensity although the underlying optimization problem is not convex;
- We prove that a few BSLs placed in locations scarcely covered by CMLs can act as gap-fillers, with the result of notably improving the rainfall estimation performance with respect to conventional schemes based on either CMLs or BSLs only;
2. Environmental Scenario
2.1. Geometrical Model
2.2. Rainfall Model
2.2.1. The Plane
2.2.2. The Plane
2.2.3. Overall Model
2.3. Quantization
3. Estimation Algorithm
| Algorithm 1:Iterative OP. |
 |
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Giuli, D.; Toccafondi, A.; Gentili, G.B.; Freni, A. Tomographic Reconstruction of Rainfall Fields through Microwave Attenuation Measurements. J. Appl. Meteorol. Climatol. 1991, 30, 1323–1340. [Google Scholar] [CrossRef]
- Messer, H.; Zinevich, A.; Alpert, P. Environmental Monitoring by Wireless Communication Networks. Science 2006, 312, 713. [Google Scholar] [CrossRef]
- Leijnse, H.; Uijlenhoet, R.; Stricker, J.N.M. Rainfall measurement using radio links from cellular communication networks. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Chwala, C.; Keis, F.; Kunstmann, H. Real-time data acquisition of commercial microwave link networks for hydrometeorological applications. Atmos. Meas. Tech. 2016, 9, 991–999. [Google Scholar] [CrossRef]
- Fencl, M.; Dohnal, M.; Valtr, P.; Grabner, M.; Bareš, V. Atmospheric observations with E-band microwave links–challenges and opportunities. Atmos. Meas. Tech. 2020, 13, 6559–6578. [Google Scholar] [CrossRef]
- Berne, A.; Uijlenhoet, R. Path-averaged rainfall estimation using microwave links: Uncertainty due to spatial rainfall variability. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Zinevich, A.; Messer, H.; Alpert, P. Prediction of rainfall intensity measurement errors using commercial microwave communication links. Atmos. Meas. Tech. 2010, 3, 1385–1402. [Google Scholar] [CrossRef]
- Pastorek, J.; Fencl, M.; Rieckermann, J.; Bareš, V. Precipitation Estimates From Commercial Microwave Links: Practical Approaches to Wet-Antenna Correction. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–9. [Google Scholar] [CrossRef]
- Goldshtein, O.; Messer, H.; Zinevich, A. Rain Rate Estimation Using Measurements From Commercial Telecommunications Links. IEEE Trans. Signal Proc. 2009, 57, 1616–1625. [Google Scholar] [CrossRef]
- Eshel, A.; Ostrometzky, J.; Gat, S.; Alpert, P.; Messer, H. Spatial Reconstruction of Rain Fields From Wireless Telecommunication Networks—Scenario-Dependent Analysis of IDW-Based Algorithms. IEEE Geosci. Remote Sens. Lett. 2020, 17, 770–774. [Google Scholar] [CrossRef]
- Eshel, A.; Messer, H.; Kunstmann, H.; Alpert, P.; Chwala, C. Quantitative Analysis of the Performance of Spatial Interpolation Methods for Rainfall Estimation Using Commercial Microwave Links. J. Hydrometeorol. 2021, 22, 831–843. [Google Scholar] [CrossRef]
- Giuli, D.; Facheris, L.; Tanelli, S. Microwave tomographic inversion technique based on stochastic approach for rainfall fields monitoring. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2536–2555. [Google Scholar] [CrossRef]
- D’Amico, M.; Cerea, L.; De Michele, C.; Nebuloni, R.; Cubaiu, M. Tomographic Reconstruction of Rainfall Fields Using Heterogeneous Frequency Microwave Links. In Proceedings of the 2018 IEEE Statistical Signal Processing Workshop (SSP), Freiburg im Breisgau, Germany, 10–13 June 2018; pp. 125–129. [Google Scholar] [CrossRef]
- Giannetti, F.; Reggiannini, R.; Moretti, M.; Adirosi, E.; Baldini, L.; Facheris, L.; Antonini, A.; Melani, S.; Bacci, G.; Petrolino, A.; et al. Real-Time Rain Rate Evaluation via Satellite Downlink Signal Attenuation Measurement. Sensors 2017, 17, 1864. [Google Scholar] [CrossRef] [PubMed]
- Gharanjik, A.; Mishra, K.V.; MR, B.S.; Ottersten, B. Learning-Based Rainfall Estimation via Communication Satellite Links. In Proceedings of the 2018 IEEE Statistical Signal Processing Workshop (SSP), Freiburg im Breisgau, Germany, 10–13 June 2018; pp. 130–134. [Google Scholar]
- Giannetti, F.; Moretti, M.; Reggiannini, R.; Vaccaro, A. The NEFOCAST System for Detection and Estimation of Rainfall Fields by the Opportunistic Use of Broadcast Satellite Signals. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 16–27. [Google Scholar] [CrossRef]
- Csurgai-Horváth, L. Small Scale Rain Field Sensing and Tomographic Reconstruction with Passive Geostationary Satellite Receivers. Remote Sens. 2020, 12, 4161. [Google Scholar] [CrossRef]
- Gragnani, G.L.; Colli, M.; Tavanti, E.; Caviglia, D.D. Advanced Real-Time Monitoring of Rainfall Using Commercial Satellite Broadcasting Service: A Case Study. Sensors 2021, 21, 691. [Google Scholar] [CrossRef]
- Giannetti, F.; Reggiannini, R. Opportunistic Rain Rate Estimation from Measurements of Satellite Downlink Attenuation: A Survey. Sensors 2021, 21, 5872. [Google Scholar] [CrossRef]
- Pastoriza-Santos, V.; Machado, F.; Nandi, D.; Pérez-Fontán, F. Low-Cost Ka-Band Satellite Receiver Data Preprocessing for Tropospheric Propagation Studies. Sensors 2022, 22, 1043. [Google Scholar] [CrossRef]
- Saggese, F.; Giannetti, F.; Lottici, V. A Novel Approach to Rainfall Rate Estimation based on Fusing Measurements from Terrestrial Microwave and Satellite Links. In Proceedings of the 2020 XXXIIIrd General Assembly and Scientific Symposium of the International Union of Radio Science, Rome, Italy, 29 August–5 September 2020. [Google Scholar]
- Raich, R.; Alpert, P.; Messer, H. Vertical Precipitation Estimation Using Microwave Links in Conjunction with Weather Radar. Environments 2018, 5, 74. [Google Scholar] [CrossRef]
- Lolli, S.; D’Adderio, L.; Campbell, J.; Sicard, M.; Welton, E.; Binci, A.; Rea, A.; Tokay, A.; Comeron, A.; Barragan, R.; et al. Vertically Resolved Precipitation Intensity Retrieved Through a Synergy Between the Ground-Based NASA MPLNET Lidar Network Measurements, Surface Disdrometer Datasets and an Analytical Model Solution. Remote Sens. 2018, 10, 1102. [Google Scholar] [CrossRef]
- International Telecommunication Union-Radiocommunication (ITU-R). Rain Height Model for Prediction Methods; International Telecommunication Union: Geneva, Switzerland, 2013. [Google Scholar]
- Olsen, R.; Rogers, D.; Hodge, D. The aRb relation in the calculation of rain attenuation. IEEE Trans. Antennas Propag. 1978, 26, 318–329. [Google Scholar] [CrossRef]
- International Telecommunication Union-Radiocommunication (ITU-R). Specific Attenuation Model for Rain for Use in Prediction Method; International Telecommunication Union: Geneva, Switzerland, 1997. [Google Scholar]
- Zhao, Z.W.; Zhang, M.G.; Wu, Z.S. Analytic Specific Attenuation Model for Rain for Use in Prediction Methods. Int. J. Infrared Millim. Waves 2001, 22, 113–120. [Google Scholar] [CrossRef]
- Shepard, D. A Two-Dimensional Interpolation Function for Irregularly-Spaced Data. In Proceedings of the ACM ’68: 1968 23rd ACM National Conference; Association for Computing Machinery: New York, NY, USA, 1968; pp. 517–524. [Google Scholar] [CrossRef]
- Łukaszyk, S. A new concept of probability metric and its applications in approximation of scattered data sets. Comput. Mech. 2004, 33, 299–304. [Google Scholar] [CrossRef]
- Rosenfeld, D. A parameterization of the evaporation of rainfall. Mon. Weather Rev. 1988, 116, 1888. [Google Scholar]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef]

 ’ marks: ground projection of data points taken by the algorithm on BSLs’ wet segments; ‘
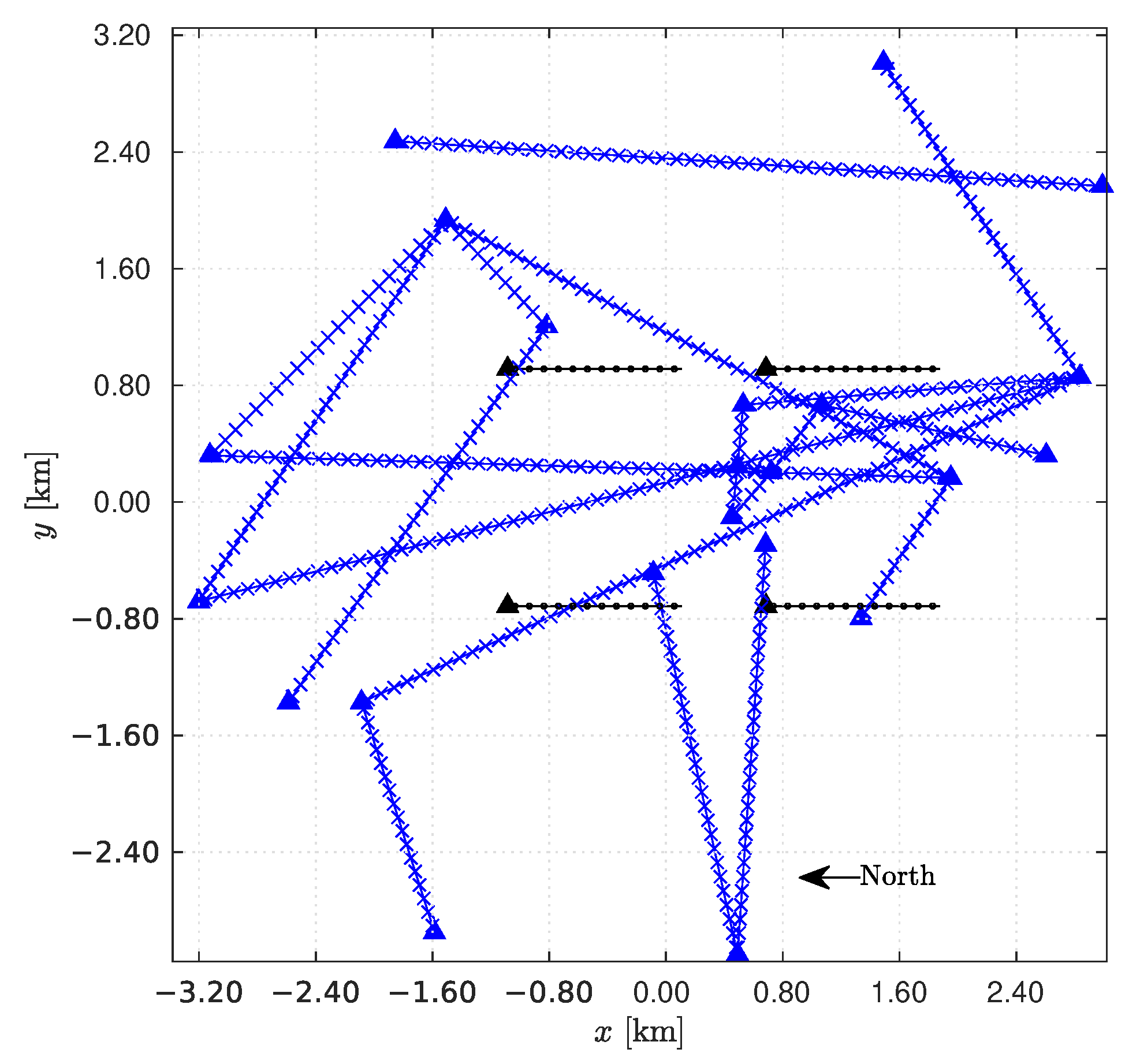
’ marks: ground projection of data points taken by the algorithm on BSLs’ wet segments; ‘ ’ marks: receivers. Notice: CMLs are full duplex links with receivers on both endpoints of each link; BSLs are one-way links with receivers only on the ground endpoint of the link.
’ marks: ground projection of data points taken by the algorithm on BSLs’ wet segments; ‘’ marks: receivers. Notice: CMLs are full duplex links with receivers on both endpoints of each link; BSLs are one-way links with receivers only on the ground endpoint of the link.
’ marks: receivers. Notice: CMLs are full duplex links with receivers on both endpoints of each link; BSLs are one-way links with receivers only on the ground endpoint of the link.
’ marks: ground projection of data points taken by the algorithm on BSLs’ wet segments; ‘’ marks: receivers. Notice: CMLs are full duplex links with receivers on both endpoints of each link; BSLs are one-way links with receivers only on the ground endpoint of the link.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| B | km | D | km | 1 km | |
|---|---|---|---|---|---|
| J | 64 | 18 GHz | polariz. | vertical | |
| 0.0601 | 1.1154 | 2 km |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saggese, F.; Lottici, V.; Giannetti, F. Rainfall Map from Attenuation Data Fusion of Satellite Broadcast and Commercial Microwave Links. Sensors 2022, 22, 7019. https://doi.org/10.3390/s22187019
Saggese F, Lottici V, Giannetti F. Rainfall Map from Attenuation Data Fusion of Satellite Broadcast and Commercial Microwave Links. Sensors. 2022; 22(18):7019. https://doi.org/10.3390/s22187019
Chicago/Turabian StyleSaggese, Fabio, Vincenzo Lottici, and Filippo Giannetti. 2022. "Rainfall Map from Attenuation Data Fusion of Satellite Broadcast and Commercial Microwave Links" Sensors 22, no. 18: 7019. https://doi.org/10.3390/s22187019
APA StyleSaggese, F., Lottici, V., & Giannetti, F. (2022). Rainfall Map from Attenuation Data Fusion of Satellite Broadcast and Commercial Microwave Links. Sensors, 22(18), 7019. https://doi.org/10.3390/s22187019