
Cross-Medium Photoacoustic Communications: Challenges, and State of the Art




Abstract
1. Introduction
2. Photoacoustic Signal Generation
2.1. Laser-Induced Breakdown
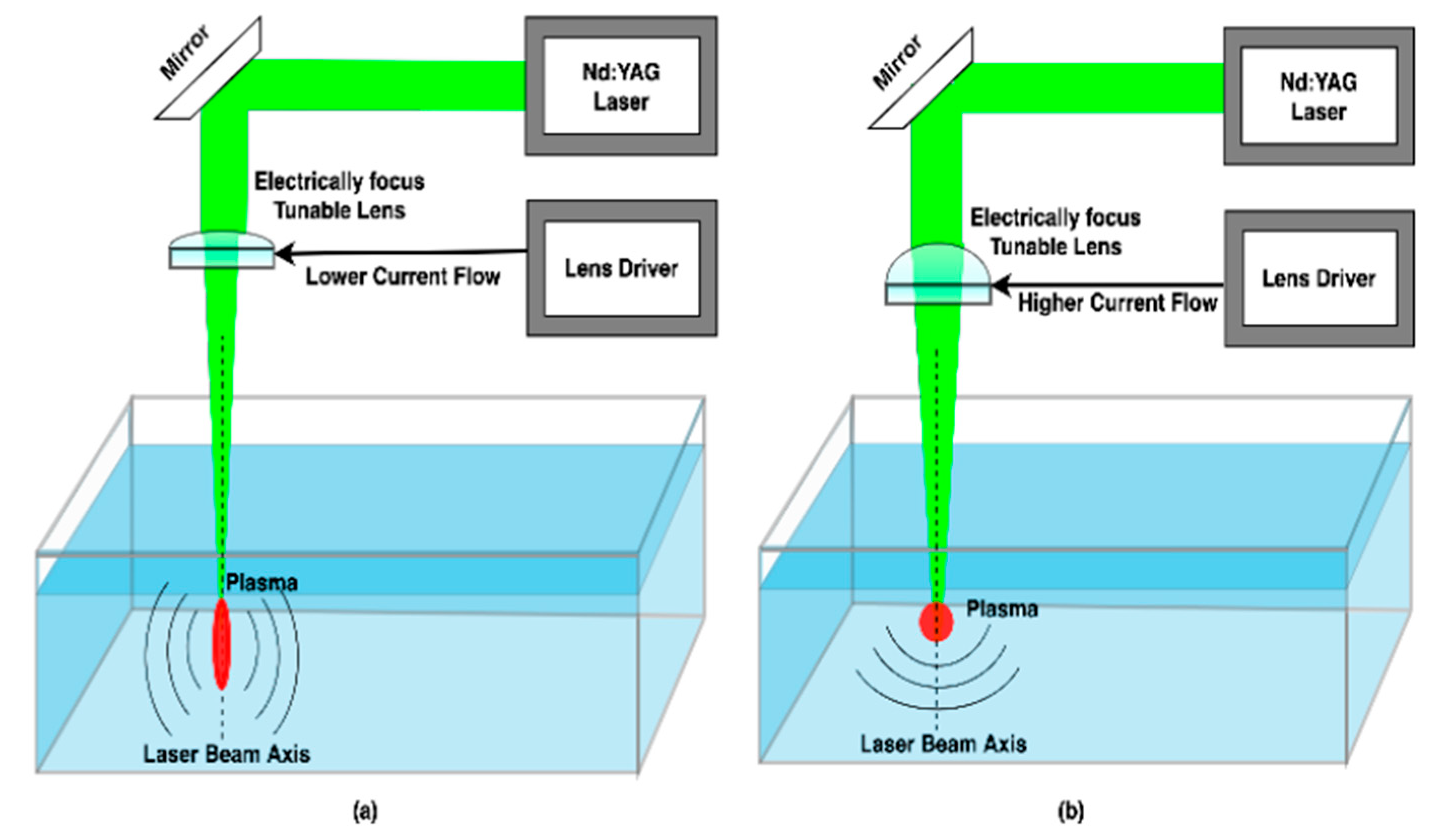
2.2. Plasma Size and Shape
2.3. Breakdown and Bubble Collapse Shockwaves
3. Properties of Linear Photoacoustic
3.1. Frequency Domain Analysis
3.2. Laser Repetition Rate
3.3. Observation Angle
4. Properties of Nonlinear Photoacoustic
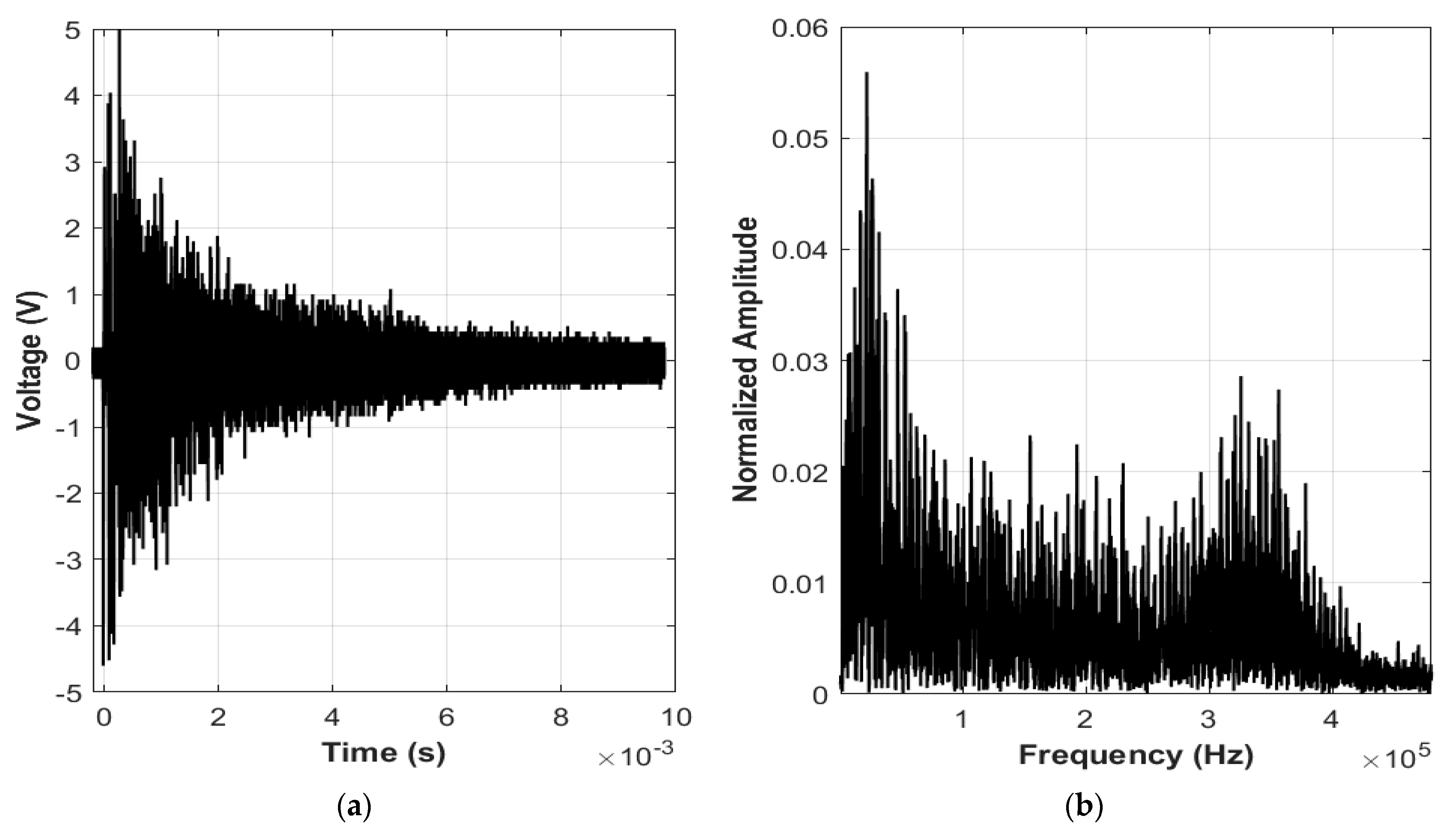
4.1. Broadband Signal
- number of laser pulses,
- laser pulse repetition period,
- time delay between peak of plasma generated transient and peak of jth cavitation generated transient,
- peak pressure of plasma generated acoustic transient as a function of range,
- peak pressure of the jth cavitation generated acoustic transient as a function of range,
- time constant of plasma-generated acoustic transient as a function of range,
- time constant of the jth cavitation generated acoustic transient as a function of range.
4.2. Remote Underwater Acoustic Source
4.3. Acoustic Pulse Duration and Dominant Frequency
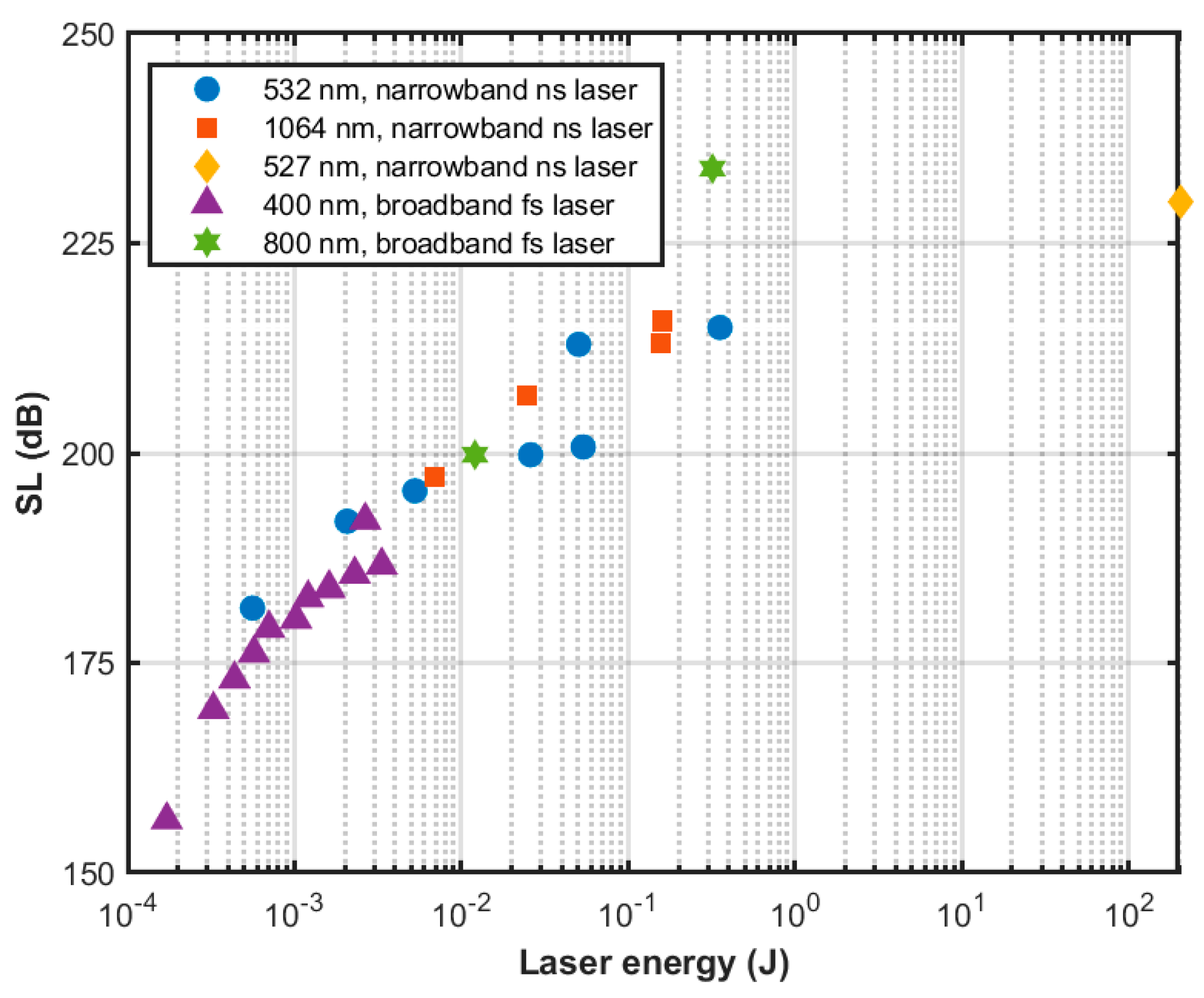
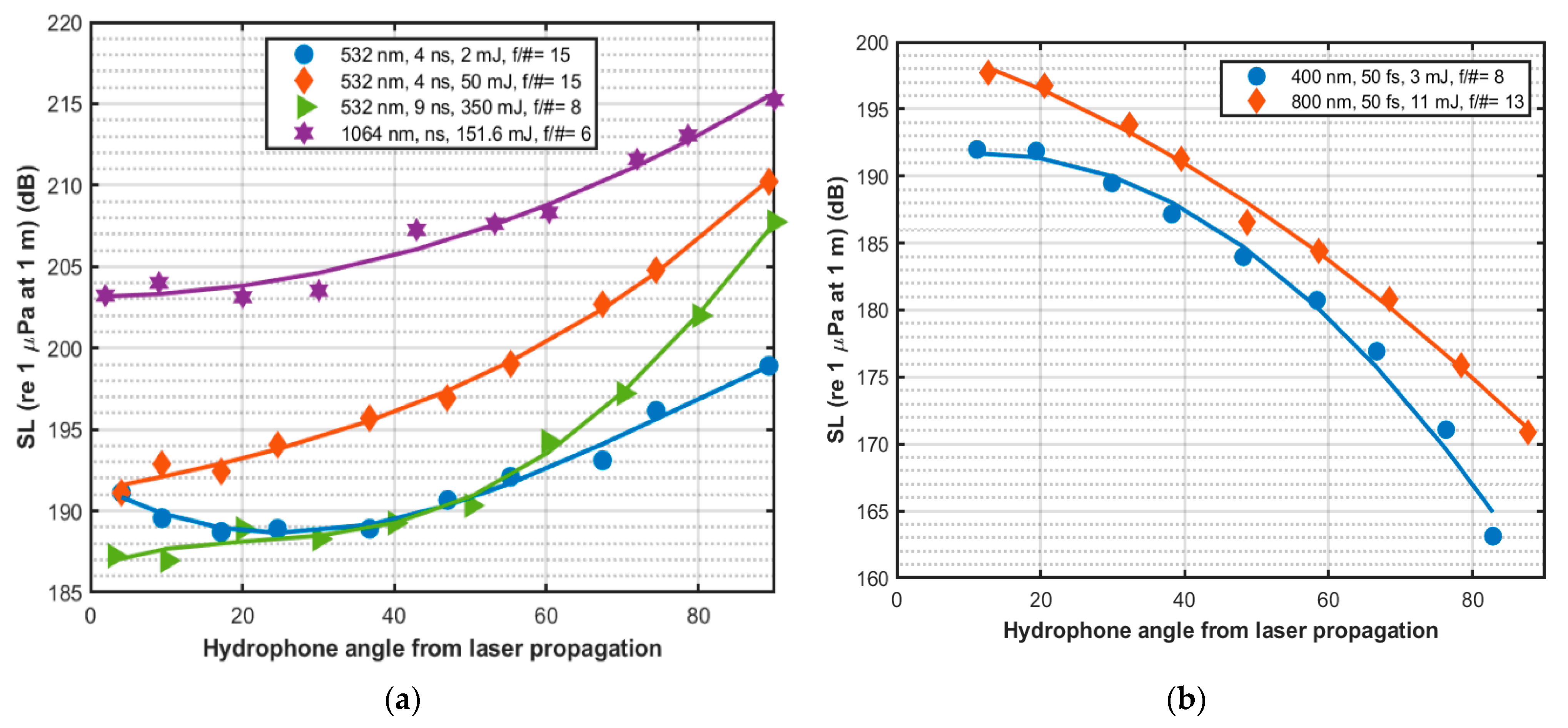
4.4. Acoustic Source Level and Directionality
5. PA-Based Communication and Localization
5.1. PA Communication Challenges
5.2. Current State of PA Communication Research
5.3. PA-Enabled Underwater Localization
6. Conclusions and Future Work
- Improving the bitrate is indeed warranted for photoacoustic links. To date the achievable bitrate is in the kHz range, which is extremely low for real-time audio and video communications. The use of traditional modulation techniques does not fully exploit the optoacoustic capabilities and often leads to slower data transmission rates. There is a clear need for innovative modulation and channel coding techniques that can leverage the different characteristics of the optoacoustic channel to increase the bitrate.
- Optimizing the laser source energy is an obvious means for strengthening the generated acoustic signal and improving the signal-to-noise ratio. The generation of a vapor cloud associated with each optoacoustic effect hinders the generation of new acoustic signals at the same location until that cloud decimates. Since high energy laser pulses tend to make larger vapor clouds that eventually require more time to decimate into the underwater environment, research is needed to find the optimum balance between the laser energy and the bitrate.
- A complete protocol stack is yet to be developed by taking advantage of the photoacoustic effect, not only the physical layer but also at the link and transport layers.
- Focusing laser light inside the water medium is extremely difficult in practice. In lab setups, one can do so by using focusing lenses. However, such an approach is not practical in an open ocean environment. Auto-focusing laser light could be a viable option that is worth investigation.
- Improving the bit error rate warrants more research efforts. Since the optoacoustic effect produces acoustic signals that propagate in an underwater environment, the channel parameters need to be estimated to ensure successful delivery of the transmitted data. Channel estimators for free space communication have been addressed in many recent publications [105,106]; yet little progress is made for underwater environments. Ideas portrayed in free space can be mapped to an underwater medium where the underwater dynamics are considered such as the medium inhomogeneity [107]. In the context of photoacoustic communication, underwater channel estimators can be leveraged for improving reception where the directionality of the acoustic beam can be controlled by the laser focusing angle. Furthermore, the creation of multiple bubbles in the nonlinear photoacoustic case can be exploited to mitigate the multipath effect where reflected waves either from the surface or bottom are used to establish communication and reduce the multipath fading [108]. Machine learning techniques would be a viable option for conducting such optimization, as demonstrated by recent work [106].
- Field testing of photoacoustic communication is necessary for gauging viability and performance. PA is an emerging area of research; most of the developments have been validated in lab settings using water tanks. The exception is work done at the US naval research laboratory where some sea-based experiments were conducted. As noted in Section 5.2, these experiments mainly focused on physics to explore the properties of the photoacoustic effect. Hence, more effort should be made to open water settings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| R | Range to the observation point |
| Incident angle | |
| Refracted angle | |
| Observation angle from vertical laser beam axis | |
| Observation angle from horizontal axis | |
| Optical transmissivity of the water | |
| Thermal expansion coefficient | |
| Specific heat of the water medium | |
| Optical absorption coefficient | |
| Laser beam radius | |
| Laser pulse duration | |
| Laser pulse repetition period | |
| Acoustic wave number | |
| Angular frequency of acoustic wave | |
| c | Speed of acoustic wave |
References
- Brockmann, C.; Grosser, V.; Hefer, J.; Guttowski, S.; Reichl, H. Miniaturized Implantable Wireless Sensor System for Real-Time Measurement of Wellbeing of Fishes. In Proceedings of the 4th International Conference on Sensor Technologies and Applications (SENSORCOMM 2010), Venice, Italy, 18–25 July 2010. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. State of the Art in Protocol Research for Underwater Acoustic Sensor Networks. ACM Mob. Comput. Commun. Rev. 2007, 11, 11–22. [Google Scholar] [CrossRef]
- Premalatha, J.; Prathap, P.M.J. A Survey on Underwater Wireless Sensor Networks: Progresses, Applications, and Challenges. MATEC Web Conf. 2016, 57, 2016. [Google Scholar] [CrossRef]
- Pompili, D.; Akyildiz, I.F. Overview of Networking Protocols for Underwater Wireless Communications. IEEE Commun. Mag. 2009, 47, 97–102. [Google Scholar] [CrossRef]
- Cayirci, E.; Tezcan, H.; Dogan, Y.; Coskun, V. Wireless Sensor Networks for Underwater Surveillance Systems. Ad Hoc Netw. 2006, 4, 431–446. [Google Scholar] [CrossRef]
- Howe, B.M.; Chao, Y.; Arabshahi, P.; Roy, S.; McGinnis, T.; Gray, A. A smart sensor web for ocean observation: Fixed and mobile platforms, integrated acoustics, satellites, and predictive modeling. IEEE J. Sel. Top. Earth Obs. Remote Sens. 2010, 3, 1–15. [Google Scholar] [CrossRef]
- Howe, B.M.; McGinnis, T.; Kirkham, H. Sensor Networks for Cabled Ocean Observatories. Geophys. Res. Abstr. 2004, 5, 113–120. [Google Scholar]
- Zhou, S.; Willett, P. Submarine Location Estimation via a Network of Detection-Only Sensors. IEEE Trans. Signal Process. 2007, 55, 3104–3115. [Google Scholar] [CrossRef]
- Kong, J.; Cui, J.-H.; Wu, D.; Gerla, M. Building Underwater Ad-Hoc Networks and Sensor Networks for Large Scale Real-Time Aquatic Applications. In Proceedings of the IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005. [Google Scholar]
- Sozer, E.M.; Stojanovic, M.; Proakis, J.G. Underwater Acoustic Networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- Available online: http://news.bbc.co.uk/2/hi/8243503.stm (accessed on 7 April 2022).
- Available online: http://senseable.mit.edu/seaswarm/ (accessed on 7 April 2022).
- Available online: http://groups.csail.mit.edu/drl/underwater_robotics/amour/amour.html (accessed on 7 April 2022).
- Available online: http://sensors.cs.umass.edu/projects/rivernet/ (accessed on 7 April 2022).
- Available online: http://www.brooke-ocean.com/s_horse1.html (accessed on 7 April 2022).
- Available online: http://www.apl.washington.edu/projects/seaglider/summary.html (accessed on 7 April 2022).
- Available online: http://www.webbresearch.com/thermal.aspx (accessed on 7 April 2022).
- Available online: http://www.defenseindustrydaily.com/277m-to-develop-plusnet-undersea-sensor-network-0486/ (accessed on 7 April 2022).
- Available online: http://www.spawar.navy.mil/robots/undersea/dssn/dssn.html (accessed on 7 April 2022).
- Available online: http://www.issnip.unimelb.edu.au/research_program/sensor_networks/core_technologies/anomaly_detection/anomaly_detection_in_ws (accessed on 7 April 2022).
- Pranitha, B.; Anjaneyulu, L. Review of research trends in underwater communications—A technical survey. In Proceedings of the International Conference on Communication and Signal Processing (ICCSP 2016), Melmaruvathur, Tamilnadu, India, 6–8 April 2016; pp. 1443–1447. [Google Scholar]
- Liu, L.; Zhou, S.; Cui, J.-H. Prospects and Problems of Wireless Communications for Underwater Sensor Networks. Wirel. Commun. Mob. Comput. 2008, 8, 977–994. [Google Scholar]
- Luo, H.; Wang, J.; Bu, F.; Ruby, R.; Wu, K.; Guo, Z. Recent Progress of Air/Water Cross-boundary Communications for Underwater Sensor Networks: A Review. IEEE Sens. J. 2022, 22, 8360–8382. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater Acoustic Sensor Networks: Research Challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Zhou, S.; Gerla, M.; Kong, J.; Cui, J.-H. The Challenges of Building Mobile Underwater Wireless Networks for Aquatic Applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar]
- Shiba, H. Layered model sound speed profile estimation. In Proceedings of the 2013 MTS/IEEE OCEANS—Bergen, Bergen, Norway, 23–27 September 2013; pp. 1–7. [Google Scholar]
- Partan, J.; Kurose, J.; Levine, B.N. A Survey of Practical Issues in Underwater Networks. In Proceedings of the 1st ACM International Workshop on Underwater Networks (WUWNet’06), New York, NY, USA, 25 September 2006. [Google Scholar]
- Syed, A.; Ye, W.; Krishnamachari, B.; Heidemann, J. Understanding Spatio-temporal Uncertainty in Medium Access with Aloha Protocols. In Proceedings of the 2nd ACM International Workshop on Underwater Networks (WUWNet’07), Montreal, QC, Canada, 9–14 September 2007. [Google Scholar]
- Su, X.; Ullah, I.; Liu, X.; Choi, D. A Review of Underwater Localization Techniques, Algorithms, and Challenges. J. Sens. 2020, 2020, 1–24. [Google Scholar] [CrossRef]
- Ullah, I.; Liu, Y.; Su, X.; Kim, P. Efficient and accurate target localization in underwater environment. IEEE Access 2019, 7, 101415–101426. [Google Scholar] [CrossRef]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater Wireless Sensor Networks: A Survey on Enabling Technologies, Localization Protocols, and Internet of Underwater Things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Bayat, M.; Crasta, N.; Aguiar, A.P.; Pascoal, A.M. Range-Based Underwater Vehicle Localization in the Presence of Unknown Ocean Currents: Theory and Experiments. IEEE Trans. Control Syst. Technol. 2016, 24, 122–139. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Islam, M.S.; Younis, M.F. Analyzing visible light communication through air–water interface. IEEE Access 2019, 7, 123830–123845. [Google Scholar] [CrossRef]
- Carver, C.J.; Tian, Z.; Zhang, H.; Odame, K.M.; Li, A.Q.; Zhou, X. AmphiLight: Direct Air-Water Communication with Laser Light. In Proceedings of the 17th USENIX Symposium on Networked Systems Design and Implementation (NSDI), Santa Clara, CA, USA, 25–27 February 2020. [Google Scholar]
- Bell, A.G. Upon the Production of Sound by Radiant Energy; Gibson Brothers: Washington, DC, USA, 1881. [Google Scholar]
- Khan, M.; Das, B.; Pati, B. Channel estimation strategies for underwater acoustic (UWA) communication: An overview. J. Frankl. Inst. 2020, 357, 7229–7265. [Google Scholar] [CrossRef]
- Neumann, D.; Wiese, T.; Utschick, W. Learning the MMSE channel estimator. IEEE Trans. Signal Process. 2018, 66, 2905–2917. [Google Scholar] [CrossRef]
- Blackmon, F.; Estes, L.; Fain, G. Linear opto-acoustic underwater communication. Appl. Opt. 2005, 44, 3833–3845. [Google Scholar] [CrossRef] [PubMed]
- Krasovitski, B.; Kislev, H.; Kimmel, E. Modeling photothermal and acoustical induced microbubble generation and growth. Ultrasonics 2007, 47, 90–101. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, P.K.; Hammer, D.X.; Rockwell, B.A. Laser-induced breakdown in aqueous media. Prog. Quantum Electron. 1997, 21, 155–248. [Google Scholar] [CrossRef]
- Noack, J.; Vogel, A. Laser-induced plasma formation in water at nanosecond to femtosecond time scales: Calculation of thresholds, absorption coefficients, and energy density. IEEE J. Quantum Electron. 1999, 35, 1156–1167. [Google Scholar] [CrossRef]
- Vogel, A.; Noack, J.; Hüttman, G.; Paltauf, G. Mechanisms of femtosecond laser nanosurgery of cells and tissues. Appl. Phys. B 2005, 81, 1015–1047. [Google Scholar] [CrossRef]
- Mahmud, M.; Islam, M.S.; Younis, M.; Carter, G. Optical Focusing based Adaptive Modulation for Optoacoustic Communication. In Proceedings of the 30th Wireless and Optical Communications Conference (WOCC), Taipei, Taiwan, 7–8 October 2021. [Google Scholar]
- Docchio, F.; Regondi, P.; Capon, M.R.C.; Mellerio, J. Study of the temporal and spatial dynamics of plasmas induced in liquids by nanosecond Nd:YAG laser pulses 1—Analysis of the plasma starting times. Appl. Opt. 1988, 27, 3661–3668. [Google Scholar] [CrossRef]
- Docchio, F.; Sacchi, C.A.; Marshall, J. Experimental investigation of optical breakdown thresholds in ocular media under single pulse irradiation with different pulse durations. Lasers Ophthalmol. 1986, 1, 83–93. [Google Scholar]
- Sacchi, C.A. Laser-induced electric breakdown in water. J. Opt. Soc. Am. B 1991, 8, 337–345. [Google Scholar] [CrossRef]
- Loertscher, H.P. Laser-induced breakdown for ophthalmic applications. In YAG Laser Ophthalmic Microsurgery; Trokel, S.C., Ed.; Appleton-Century-Crofts: Norwalk, CT, USA, 1983; pp. 39–66. [Google Scholar]
- Zysset, B.; Fujimoto, J.G.; Deutsch, T.F. Time-resolved measurements of picosecond optical breakdown. Appl. Phys. B 1989, 48, 139–147. [Google Scholar] [CrossRef]
- Vogel, A.; Busch, S.; Jungnickel, K.; Birngruber, R. Mechanisms of intraocular photo disruption with picosecond and nanosecond laser pulses. Lasers Surg. Med. 1994, 15, 32–43. [Google Scholar] [CrossRef]
- Kennedy, P.K. A first-order model for computation of laser-induced breakdown thresholds in ocular and aqueous media Part I—Theory. IEEE J. Quantum Electron. 1995, 31, 2241–2249. [Google Scholar] [CrossRef]
- Loy, M.M.T.; Shen, Y.R. Study of self-focusing and small-scale filaments of light. IEEE J. Quantum Electron. 1973, 9, 409–422. [Google Scholar] [CrossRef][Green Version]
- Feng, Q.; Moloney, J.; Newell, A.; Wright, E.; Cook, K.; Kennedy, P.; Hammer, D.; Rockwell, B.; Thompson, C. Theory and simulation on the threshold of water breakdown induced by focused ultrashort laser pulses. IEEE J. Quantum Electron. 1997, 33, 127–137. [Google Scholar] [CrossRef]
- Vogel, A.; Noack, J.; Nahen, K.; Theisen, D.; Busch, S.; Parlitz, U.; Hammer, D.X.; Noojin, G.D.; Rockwell, B.A.; Birngruber, R. Energy balance of optical breakdown in water at nanosecond to femtosecond time scales. Appl. Phys. B 1999, 68, 271–280. [Google Scholar] [CrossRef]
- Vogel, A.; Nahen, K.; Theisen, D.; Noack, J. Plasma formation in water by picosecond and nanosecond Nd:YAG laser pulses. I. Optical breakdown at threshold and superthreshold irradiance. IEEE J. Sel. Top. Quantum Electron. 1996, 2, 847–860. [Google Scholar] [CrossRef]
- Hammer, D.X.; Jansen, E.D.; Frenz, M.; Noojin, G.C.; Thomas, R.J.; Noack, J.; Vogel, A.; Rockwell, B.A.; Welch, A.J. Shielding properties of laser-induced breakdown in water for pulse durations from 5 ns to 125 fs. Appl. Opt. 1997, 36, 5630–5640. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, P.K.; Boppart, S.A.; Hammer, D.X.; Rockwell, B.A.; Noojin, G.D.; Roach, W.P. A first-order model for computation of laser-induced breakdown thresholds in ocular and aqueous media Part II—Comparison to experiment. IEEE J. Quantum Electron. 1995, 31, 2250–2257. [Google Scholar] [CrossRef]
- Tagawa, Y.; Yamamoto, S.; Hayasaka, K.; Kameda, M. On pressure impulse of a laser-induced underwater shockwave. J. Fluid Mech. 2016, 808, 5–18. [Google Scholar] [CrossRef]
- Tian, Y.; Xue, B.; Song, J.; Lu, Y.; Zheng, R. Stabilization of laser-induced plasma in bulk water using large focusing angle. Appl. Phys. Lett. 2016, 109, 061104. [Google Scholar] [CrossRef]
- Song, J.; Guo, J.; Tian, Y.; Xue, B.; Lu, Y.; Zheng, R. Investigation of laser-induced plasma characteristics in bulk water under different focusing arrangements. Appl. Opt. 2018, 57, 1640–1644. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, L.; Xue, B.; Chen, Q.; Li, Y. Laser focusing geometry effects on laser-induced plasma and laser-induced breakdown spectroscopy in bulk water. J. Anal. At. Spectrom. 2019, 34, 118–126. [Google Scholar] [CrossRef]
- Sinibaldi, G.; Occhicone, A.; Pereira, F.A.; Caprini, D.; Marino, L.; Michelotti, F.; Casciola, C.M. Laser induced cavitation: Plasma generation and breakdown shockwave. Phys. Fluids 2019, 31, 103302. [Google Scholar] [CrossRef]
- Vogel, A.; Busch, S.; Parlitz, U. Shock wave emission and cavitation bubble generation by picosecond and nanosecond optical breakdown in water. J. Acoust. Soc. Am. 1996, 100, 148–165. [Google Scholar] [CrossRef]
- Lauterborn, W.; Vogel, A. shock wave emission by laser generated bubbles. In Bubble Dynamics and Shock Waves; Shock Wave Science and Technology Reference Library; Delale, C., Ed.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8. [Google Scholar]
- Rayleigh, L. On the pressure developed in a liquid during the collapse of a spherical cavity. Philos. Mag. J. Sci. 1917, 34, 94–98. [Google Scholar] [CrossRef]
- Berthelot, Y.H. Thermoacoustic generation of narrow-band signals with high repetition rate pulsed lasers. J. Acoust. Soc. Am. 1989, 85, 1173–1181. [Google Scholar] [CrossRef]
- Islam, M.S.; Younis, M.; Choa, F.S. Optimizing Acoustic Signal Quality for Linear Optoacoustic Communication. In Proceedings of the IEEE International Conference on Communications (ICC 2021), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Blackmon, F.; Antonelli, L. Experimental demonstration of multiple pulse nonlinear optoacoustic signal generation and Control. Appl. Opt. 2005, 44, 103. [Google Scholar] [CrossRef]
- Jones, T.G.; Ting, A.; Penano, J.; Sprangle, P.; DiComo, G. Remote underwater ultrashort pulse laser acoustic source. In Proceedings of the Conference on Lasers and Electro-Optics and Quantum Electronics and Laser Science Conference (CLEO/QELS 2006), Long Beach, CA, USA, 21–26 May 2006; pp. 1–2. [Google Scholar]
- Jones, T.G.; Ting, A.; Sprangle, P.; Bibee, L.D.; Peñano, J. Remote Intense Laser Acoustic Source. U.S. Patent 7,260,023, 21 August 2007. [Google Scholar]
- Hornstein, M.K.; Jones, T.G.; Ting, A.C.; Lindwall, D. Optical bandwidth and focusing dynamics effects on an underwater laser acoustic source. In Proceedings of the Conference on Lasers and Electro-Optics and Conference on Quantum Electronics and Laser Science Conference (CLEO/QELS 2009), Baltimore, MA, USA, 31 May–5 June 2009; pp. 1–2. [Google Scholar]
- Helle, M.H.; Jones, T.G.; Peñano, J.R.; Kaganovich, D.; Ting, A. Formation and propagation of meter-scale laser filaments in water. Appl. Phys. Lett. 2013, 103, 121101. [Google Scholar] [CrossRef]
- Milián, C.; Jarnac, A.; Brelet, Y.; Jukna, V.; Houard, A.; Mysyrowicz, A.; Couairon, A. Effect of input pulse chirp on nonlinear energy deposition and plasma excitation in water. J. Opt. Soc. Am. B 2014, 31, 2829. [Google Scholar] [CrossRef][Green Version]
- Jones, T.G.; Helle, M.; Ting, A.; Nicholas, M. Tailoring Underwater Laser Acoustic Pulses. NRL Rev. Acoust. 2012, 142–143. [Google Scholar]
- Jones, T.G.; Ting, A.; Gordon, D.; Helle, M.; Peñano, J. Two-Laser Generation of Extended Underwater Plasma. U.S. Patent 9,088,123, 21 July 2015. [Google Scholar]
- Jones, T.G.; Ting, A.; Penano, J.; Sprangle, P.; Bibee, L.D. Remote Intense Laser Acoustic Source. NRL Rev. 2007, 121–123. [Google Scholar]
- Jones, T.G.; Hornstein, M.; Ting, A.; Gordon, D.; Wilkes, Z. Characterization of underwater laser acoustic source for navy applications. In Proceedings of the IEEE International Conference on Plasma Science (ICOPS 2009), San Diego, CA, USA, 1–5 June 2009; p. 1. [Google Scholar]
- Noack, J.; Hammer, D.X.; Noojin, G.D.; Rockwell, B.A.; Vogel, A. Influence of pulse duration on mechanical effects after laser-induced breakdown in water. J. Appl. Phys. 1998, 83, 7488–7495. [Google Scholar] [CrossRef]
- Yellaiah, J.; Kiran, P.P. Input pulse duration effect on laser-induced underwater acoustic signals. Appl. Opt. 2021, 60, 4582. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Gao, X.; Hussain, A.; Lin, J. The effect of distance between Lens and water surface on the acoustic characteristics induced by a 532 nm nanosecond laser under water. Results Opt. 2021, 2, 100053. [Google Scholar] [CrossRef]
- Blackmon, F.; Antonelli, L. Remote, Aerial, Trans-Layer, Linear and Non-Linear Downlink Underwater Acoustic Communication. In Proceedings of the OCEANS 2006 Conference, Boston, MA, USA, 18–21 September 2006; pp. 1–7. [Google Scholar]
- Brelet, Y.; Jarnac, A.; Carbonnel, J.; André, Y.-B.; Mysyrowicz, A.; Houard, A.; Fattaccioli, D.; Guillermin, R.; Sessarego, J.-P. Underwater acoustic signals induced by intense ultrashort laser pulse. J. Acoust. Soc. Am. 2015, 137, EL288–EL292. [Google Scholar] [CrossRef] [PubMed]
- Ji, Z.; Fu, Y.; Li, J.; Zhao, Z.; Mai, W. Photoacoustic Communication from the Air to Underwater Based on Low-Cost Passive Relays. IEEE Commun. Mag. 2021, 59, 140–143. [Google Scholar] [CrossRef]
- Available online: https://www.optotune.com/focus-tunable-lenses (accessed on 29 April 2022).
- Jiang, H.; Qiu, H.; He, N.; Liao, X. Research on the optoacoustic communication system for speech transmission by variable laser-pulse repetition rates. Results Phys. 2018, 9, 1291–1296. [Google Scholar] [CrossRef]
- Huang, H.; Zheng, Y.R. Node localization with AoA assistance in multi-hop underwater sensor networks. Ad Hoc Netw. 2018, 78, 32–41. [Google Scholar] [CrossRef]
- Nguyen, T.L.N.; Shin, Y. An efficient RSS localization for underwater wireless sensor networks. Sensors 2019, 19, 3105. [Google Scholar] [CrossRef]
- Liu, F.; Chen, H.; Zhang, L.; Xie, L. Time-Difference-of-Arrival-Based Localization Methods of Underwater Mobile Nodes Using Multiple Surface Beacons. IEEE Access 2021, 9, 31712–31725. [Google Scholar] [CrossRef]
- Qiao, G.; Zhao, C.; Zhou, F.; Ahmed, N. Distributed localization based on signal propagation loss for underwater sensor networks. IEEE Access 2019, 7, 112985–112995. [Google Scholar] [CrossRef]
- Ssu, K.-F.; Ou, C.-H.; Jiau, H.C. Localization with mobile anchor points in wireless sensor networks. IEEE Trans. Veh. Technol. 2005, 54, 1187–1197. [Google Scholar] [CrossRef]
- Dubrovinskaya, E.; Nissen, I.; Casari, P. On the accuracy of passive multipath-aided underwater range estimation. In Proceedings of the IEEE 3rd Underwater Communications and Networking Conference (UComms 2016), Lerici, Italy, 30 August–1 September 2016; pp. 1–5. [Google Scholar]
- Anaya, E.; Marquez, D.; Matos, N.; Nieves, G.; Valera, J.; Aceros, C.; Rodriguez, D. Underwater channel estimation and multiple object tracking using embedded computing. In Proceedings of the IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS 2017), Boston, MA, USA, 5–8 August 2017; pp. 188–191. [Google Scholar]
- Gul, S.; Zaidi, S.S.H.; Khan, R.; Wala, A.B. Underwater acoustic channel modeling using BELLHOP ray tracing method. In Proceedings of the 14th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 10–14 January 2017; pp. 665–670. [Google Scholar]
- Martins, G.R.M.S.; Cabral, J.; Lanceros-Mendez, S. Effect of the Acoustic Impedance in Ultrasonic Emitter Transducers using Digital Modulations. Ocean Eng. 2015, 100, 107–116. [Google Scholar] [CrossRef]
- Sameer, B.T.P.; Koilpillai, R.D.; Muralikrishna, P. Underwater acoustic communications: Design considerations at the physical layer based on field trials. In Proceedings of the National Conference on Communications (NCC), Kharagpur, India, 3–5 February 2012; pp. 1–5. [Google Scholar]
- Finette, S. A stochastic representation of environmental uncertainty and its coupling to acoustic wave propagation in ocean waveguides. J. Acoust. Soc. Am. 2006, 120, 2567–2579. [Google Scholar] [CrossRef]
- LePage, K.D. Modeling propagation and reverberation sensitivity to oceanographic and seabed variability. IEEE J. Ocean. Eng. 2006, 31, 402–412. [Google Scholar] [CrossRef]
- Allison, M. A Resilient Cooperative Localization Strategy for Autonomous Underwater Vehicles in Swarms. In Proceedings of the 10th Annual Computing and Communication Workshop and Conference (CCWC 2020), Las Vegas, NV, USA, 6–8 January 2020; pp. 150–156. [Google Scholar] [CrossRef]
- Islam, M.S.; Younis, M.; Ahmed, A. Communication through Air Water Interface Using Multiple Light Sources. In Proceedings of the IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018. [Google Scholar]
- Islam, M.S.; Younis, M. An Adaptive DPPM for Efficient and Robust Visible Light Communication across the Air-Water Interface. In Proceedings of the 29th Wireless and Optical Communications Conference (WOCC), Newark, NJ, USA, 1–2 May 2020. [Google Scholar]
- Saif, J.B.; Younis, M. Underwater Localization using Airborne Visible Light Communication Links. In Proceedings of the IEEE Global Communications Conference (GLOBECOM 2021), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Kisseleff, S.; Akyildiz, I.F.; Gerstacker, W.H. Survey on advances in magnetic induction-based wireless underground sensor networks. IEEE Internet Things J. 2018, 5, 4843–4856. [Google Scholar] [CrossRef]
- Li, Y.; Wang, S.; Jin, C.; Zhang, Y.; Jiang, T. A survey of underwater magnetic induction communications: Fundamental issues recent advances and challenges. IEEE Commun. Surv. Tutor. 2019, 21, 2466–2487. [Google Scholar] [CrossRef]
- Mahmud, M.; Younis, M.; Carter, G.; Choa, F. Underwater Node Localization using Optoacoustic Signals. In Proceedings of the IEEE International Conference on Communications (ICC 2022), Seoul, Korea, 16–20 May 2022. [Google Scholar]
- Elzanaty, A.; Guerra, A.; Guidi, F.; Alouini, M. Reconfigurable Intelligent Surfaces for Localization: Position and Orientation Error Bounds. IEEE Trans. Signal Process. 2021, 69, 5386–5402. [Google Scholar] [CrossRef]
- Liu, C.; Liu, X.; Ng, D.W.K.; Yuan, J. Deep residual learning for channel estimation in intelligent reflecting surface-assisted multi-user communications. IEEE Trans. Wirel. Commun. 2021, 21, 898–912. [Google Scholar] [CrossRef]
- Emokpae, L.; Younis, M. Surface-Reflection-Based Communication and Localization in Underwater Sensor Networks. ACM Trans. Sen. Netw. 2014, 10, 1–51. [Google Scholar] [CrossRef]
- Ahmed, A.; Younis, M. Acoustic Beam Characterization and Selection for Optimized Underwater Communication. Appl. Sci. 2019, 9, 2740. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (nm) | Focusing Angle, | f- | (μm) | Energy Threshold, (μJ) | Source | ||
|---|---|---|---|---|---|---|---|
| 76 ns | 750 | 19° | 2.99 | 20 | 5497.78 | 0.23 | [54] |
| 6 ns | 1064 | 32° | 1.74 | 5.39 ± 0.60 | 89.9 ± 0.8 | 0.66 ± 0.15 | [55] |
| 6 ns | 1064 | 22° | 2.57 | 7.66 ± 0.31 | 140.6 ± 1.3 | 0.51 ± 0.04 | [55] |
| 6 ns | 1064 | 8° | 7.15 | 11.53 ± 0.42 | 493.4 ± 11.3 | 0.79 ± 0.06 | [55] |
| 6 ns | 1064 | 5.4° | 10.60 | 14.57 ± 0.60 | 1082.0 ± 22.0 | 1.08 ± 0.09 | [55] |
| 6 ns | 1064 | 1.8° | 31.83 | 47.78 ± 1.14 | 8022.9 ±283.8 | 0.75 ± 0.08 | [55] |
| 6 ns | 532 | 22° | 2.57 | 5.31 ± 0.23 | 38.5 ± 0.6 | 0.29 ± 0.03 | [55] |
| 60 ps | 532 | 16.7° | 3.41 | 7.2 | 10.0 | 4.07 | [56] |
| 60 ps | 532 | 13° | 4.39 | 5.6 | 4.13 | 2.8 | [54] |
| 30 ps | 1064 | 28° | 2.00 | 4.60 ± 0.48 | 2.30 ± 0.01 | 4.61 ± 0.96 | [55] |
| 30 ps | 1064 | 22° | 2.57 | 4.72 ± 0.38 | 2.38 ± 0.01 | 4.53 ± 0.73 | [55] |
| 30 ps | 1064 | 14° | 4.07 | 5.80 ± 0.34 | 5.0 ± 0.07 | 6.31 ± 0.74 | [55] |
| 30 ps | 1064 | 8.5° | 6.73 | 9.60 ± 0.42 | 9.85 ± 0.15 | 4.53 ± 0.40 | [55] |
| 30 ps | 1064 | 4° | 14.32 | 19.54 ± 0.36 | 33.29 ± 0.39 | 3.70 ± 0.14 | [55] |
| 30 ps | 1064 | 1.7° | 33.70 | 47.74 ± 3.12 | 178.54 ± 2.62 | 3.32 ± 0.44 | [55] |
| 30 ps | 532 | 22° | 2.57 | 3.38 ± 0.32 | 1.01 ± 0.001 | 3.75 ± 0.72 | [55] |
| 3 ps | 580 | 16.7° | 3.41 | 10.8 | 1.1 | 4.15 | [56] |
| 3 ps | 580 | 16° | 3.56 | 5.0 | 0.51 | 8.5 | [54] |
| 300 fs | 580 | 16.7° | 3.41 | 10.8 | 1.0 | 36.0 | [56] |
| 300 fs | 580 | 16° | 3.56 | 5 | 0.27 | 47.6 | [54] |
| 125 fs | 580 | 16.7° | 3.41 | 10.8 | 0.35 | 30.6 | [56] |
| 100 fs | 580 | 16° | 3.56 | 4.4 | 0.17 | 111.0 | [54] |
| Wave Shape | Laser Energy (J) | Experimental SL ( μPa) | Experimental Range (M) |
|---|---|---|---|
| 10-kHz Chopper | 30 | 113 | 100 |
| 10-kHz Sinewave | 25 | 111.8 | 78 |
| Pulse Train | 25 | 112.1 | 80 |
| 4-Bit PSK | 25 | 106 | 15 |
| 11-Tone MFSK | 25 | 101.1 | 23 |
| 5-Tone MFSK | 25 | 100.7 | 22 |
| 2-Tone MFSK | 25 | 104.4 | 33 |
| 2-Tone FSK | 25 | 104.9 | 25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmud, M.; Islam, M.S.; Ahmed, A.; Younis, M.; Choa, F.-S. Cross-Medium Photoacoustic Communications: Challenges, and State of the Art. Sensors 2022, 22, 4224. https://doi.org/10.3390/s22114224
Mahmud M, Islam MS, Ahmed A, Younis M, Choa F-S. Cross-Medium Photoacoustic Communications: Challenges, and State of the Art. Sensors. 2022; 22(11):4224. https://doi.org/10.3390/s22114224
Chicago/Turabian StyleMahmud, Muntasir, Md Shafiqul Islam, Akram Ahmed, Mohamed Younis, and Fow-Sen Choa. 2022. "Cross-Medium Photoacoustic Communications: Challenges, and State of the Art" Sensors 22, no. 11: 4224. https://doi.org/10.3390/s22114224
APA StyleMahmud, M., Islam, M. S., Ahmed, A., Younis, M., & Choa, F.-S. (2022). Cross-Medium Photoacoustic Communications: Challenges, and State of the Art. Sensors, 22(11), 4224. https://doi.org/10.3390/s22114224