
Design and Evaluation of Low-Cost Vibration-Based Machine Monitoring System for Hay Rotary Tedder

 ,
,  , , ,
, , , 
Abstract
:1. Introduction
2. Literature Review
2.1. High-Performance and Low-Cost Sensing
2.2. Vibration Calibration of Accelerometers
2.3. Static and Dynamic Performance
2.4. Research Purpose
- Using a low-cost AVR microcontroller for such an application. The unit does not need any operating system, and this makes programming easier than Raspberry Pi, for example. This significantly reduces time consumption for creating software and the total cost of the system. The majority of low-cost solutions use high-level programming languages. Our tests confirmed that computation time for a program expressed in an AVR assembler is 2–3 times faster than its equivalent in the C language.
- Blending self-created hardware and software for decision support. The software, which is based on statistical features, such as RMS, kurtosis and crest factors, enables the differentiation of the worn parts of a rotary tedder from fully-operational parts. Experimental tests showed that the electronic prototype ensures acceptable accuracy of acceleration measurement at low frequencies for low-acceleration amplitude when compared with the commercial system.
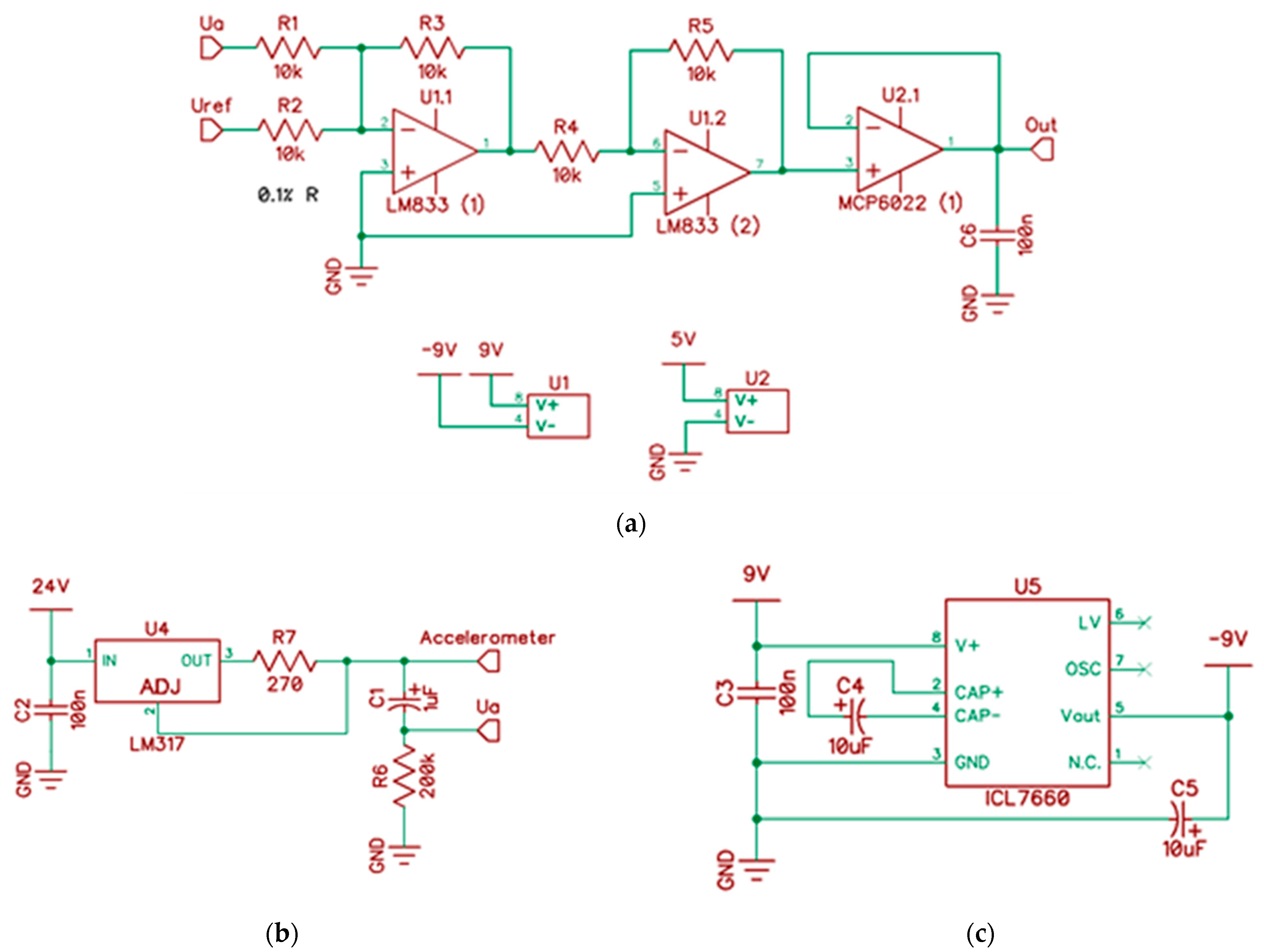
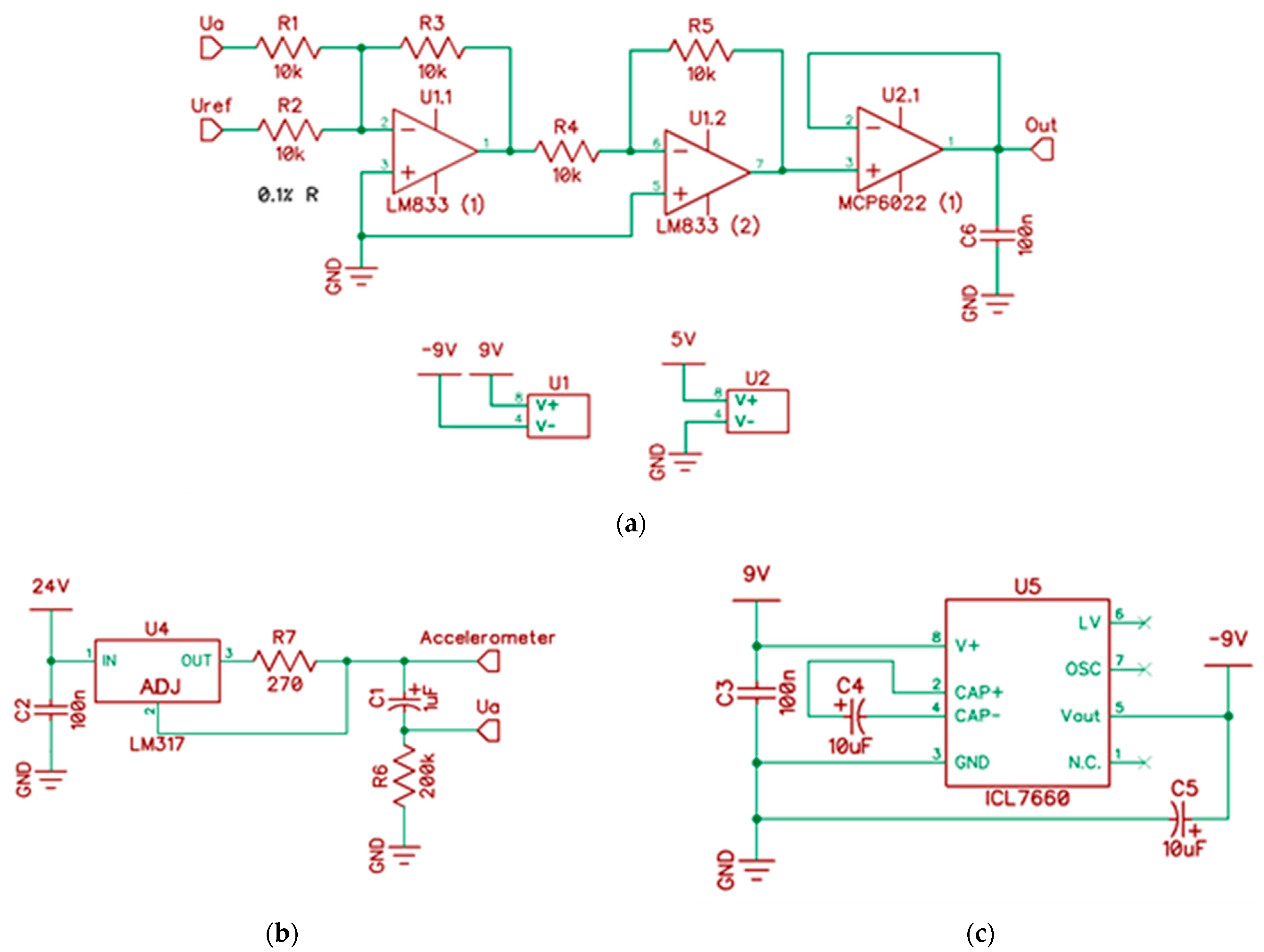
3. Materials and Methods
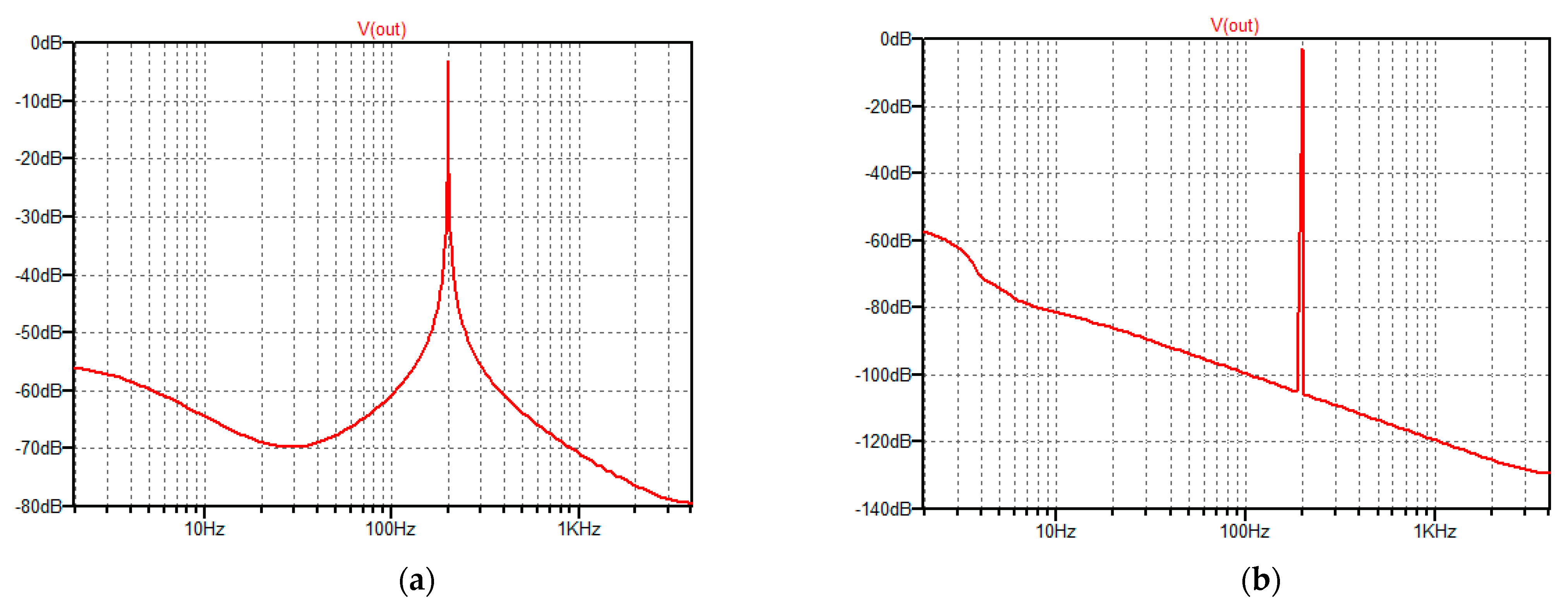
4. Simulation Analysis of the Signal Conditioner
Spectral Analysis
5. Laboratory Tests of Selected Sensors Exposed to Low Accelerations
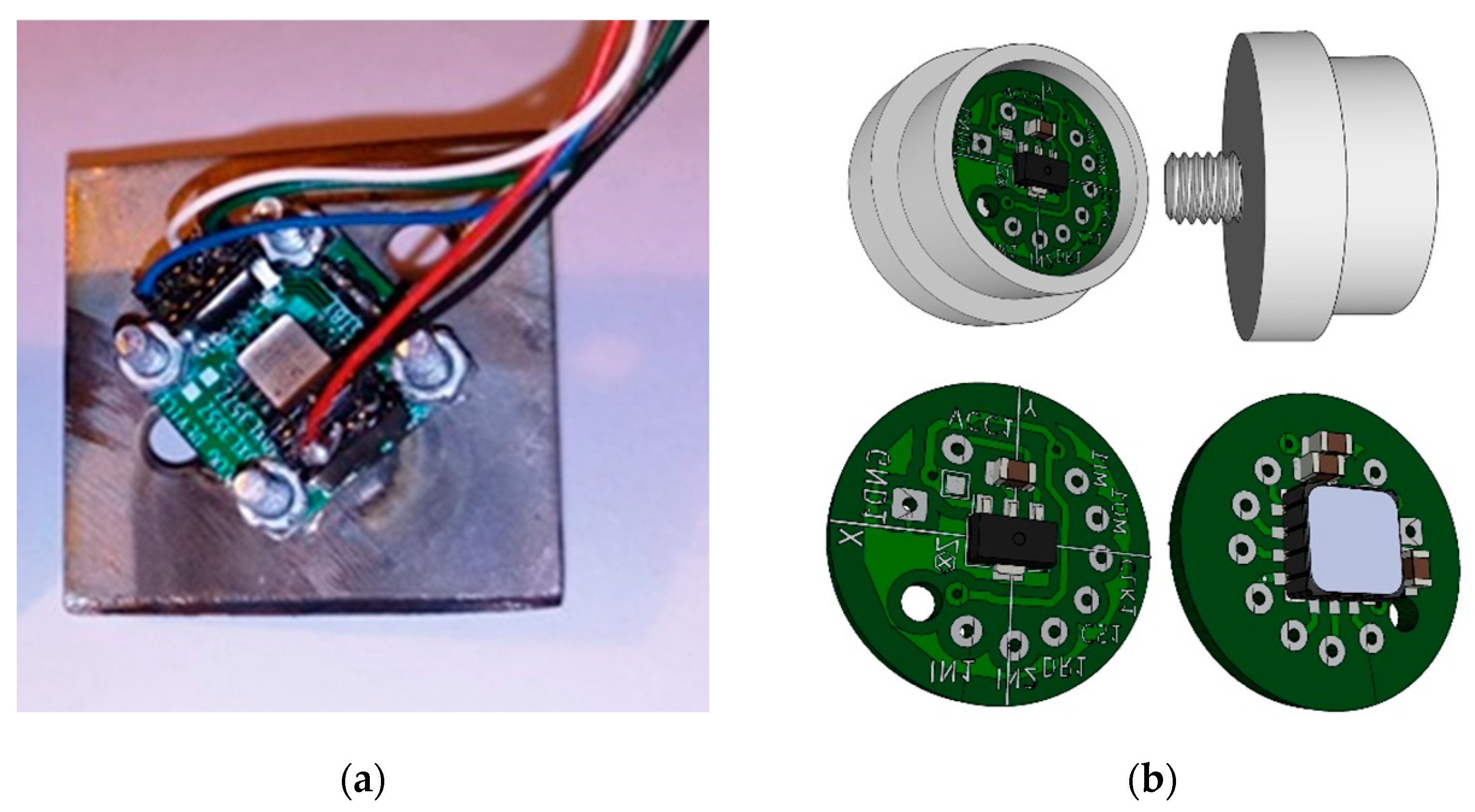
6. The Design of a Vibration-Based Monitoring System for Hay-Handling Equipment
- configuring the ADC in the single conversion mode;
- disabling the ADC interrupt;
- executing the sleep () function.
- ISR (ADC_vect)
- {
- }
- void initADC()
- {
- ADMUX |= (1<<REFS1)|(1<<REFS0);
- ADCSRA |= (1<<ADEN)|(1<<ADIE);
- }
- int getADC()
- {
- set_sleep_mode(SLEEP_MODE_ADC); //canceller mode
- cli();
- sleep_enable(); //unlock sleep mode
- sei();
- sleep_cpu(); //enter sleep mode
- sleep_disable(); //lock sleep mode
- return ADC;
- }
- 1.
- creating an array of raw data values to prepare butterfly operations;
- 2.
- preparing the Hamming window;
- 3.
- performing butterfly operations;
- 4.
- arranging the results at the output of a butterfly.
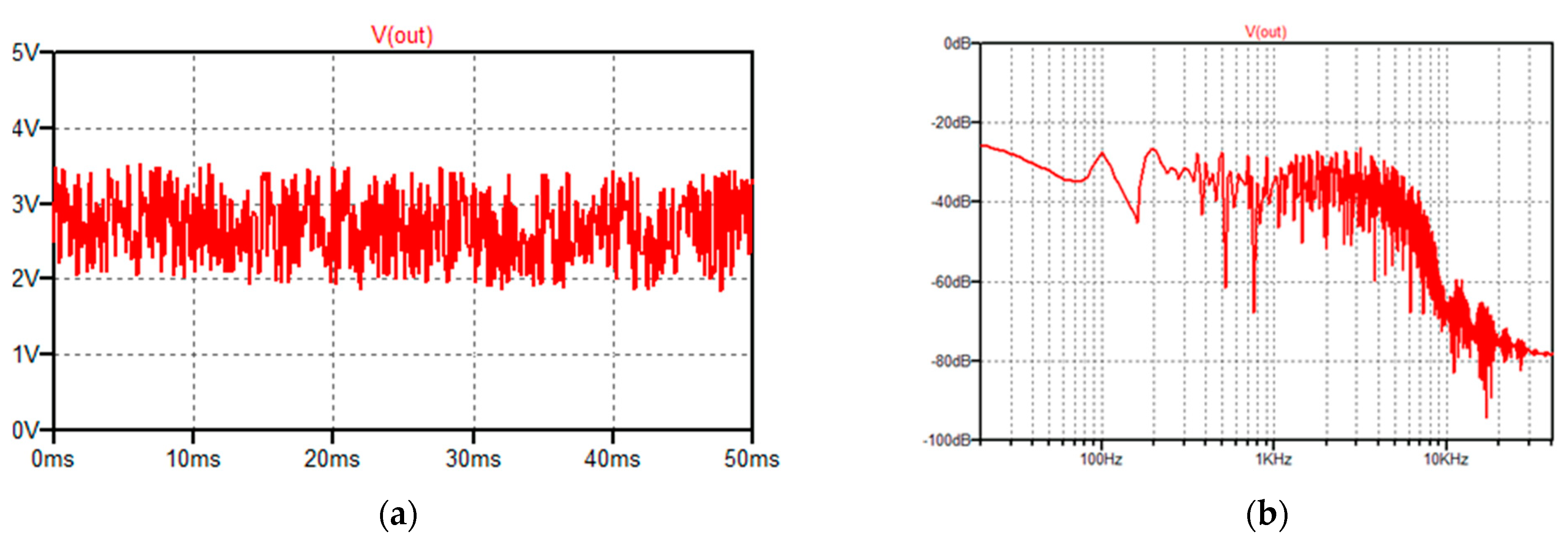
7. Laboratory Tests—Comparison of the Time and Frequency Characteristics of the Constructed Measuring System with the Commercial AVM4000 System
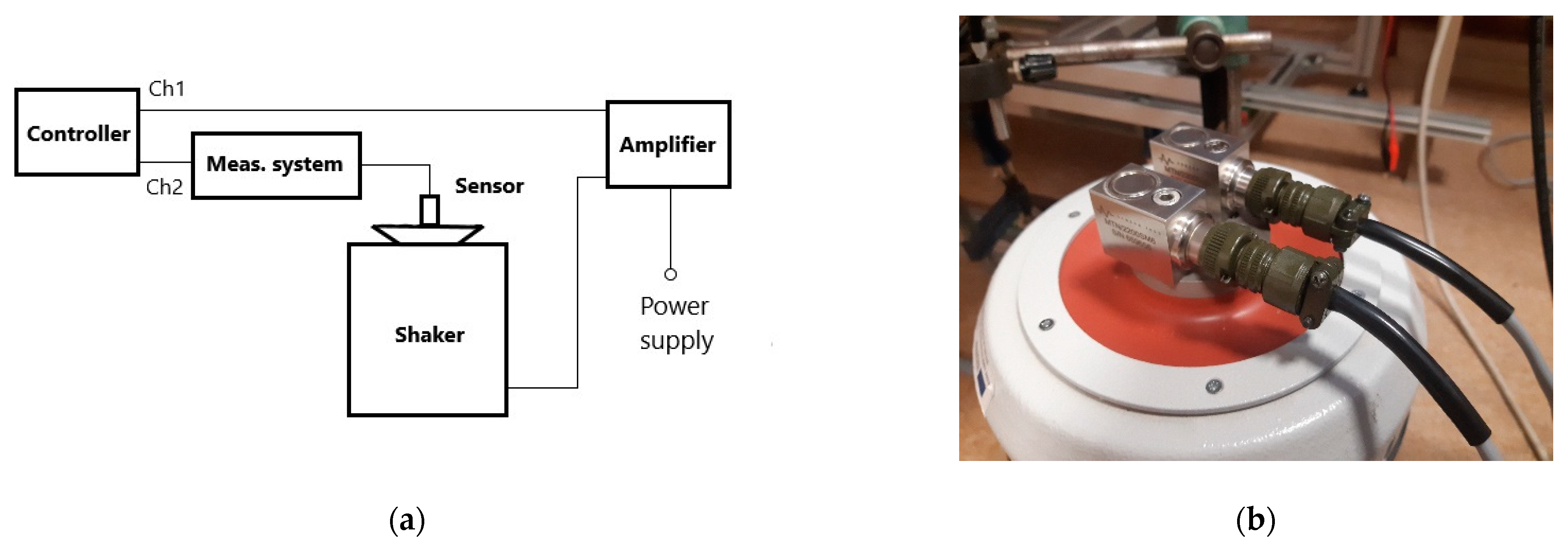
7.1. Sinusioidal Excitation
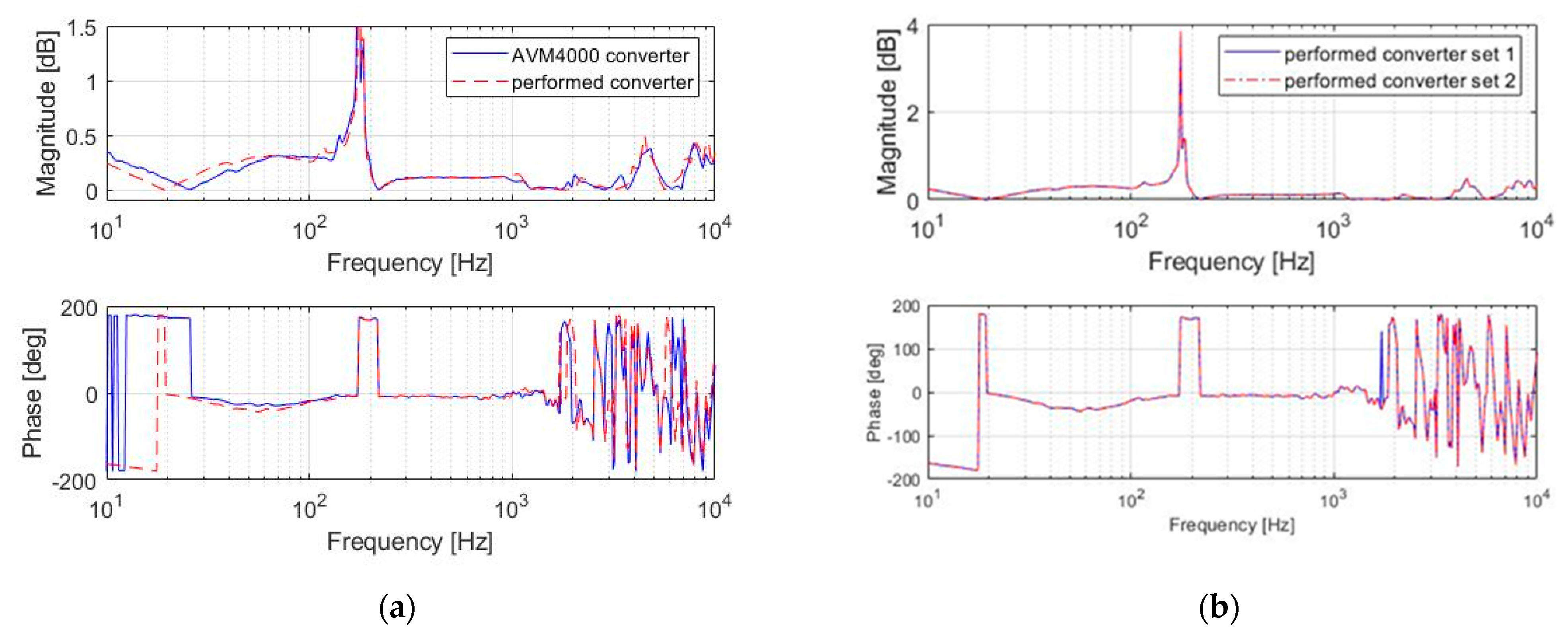
7.2. Swept-Sine Frequency Response
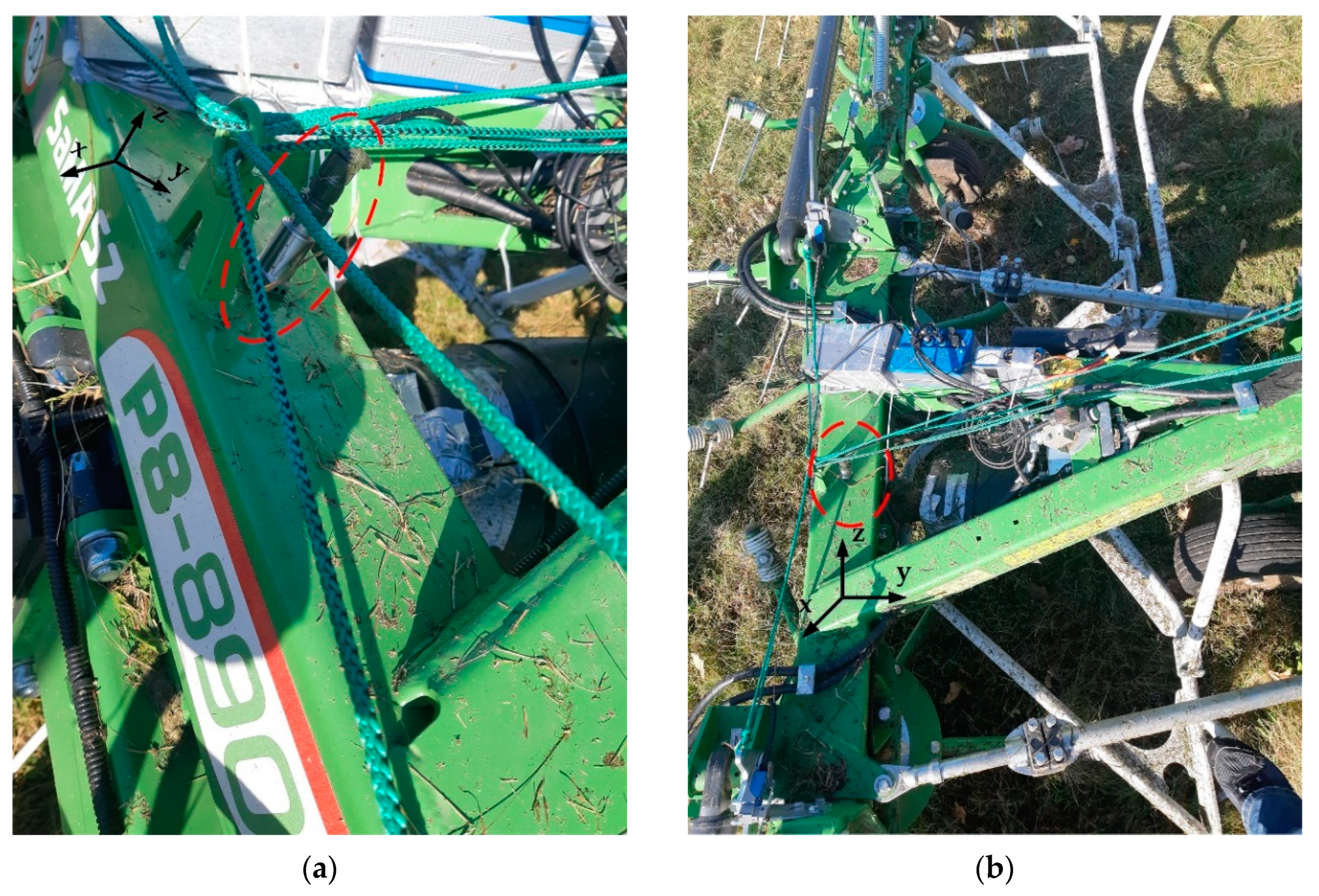
8. Machine Vibration Measurements Using the Constructed Measuring System
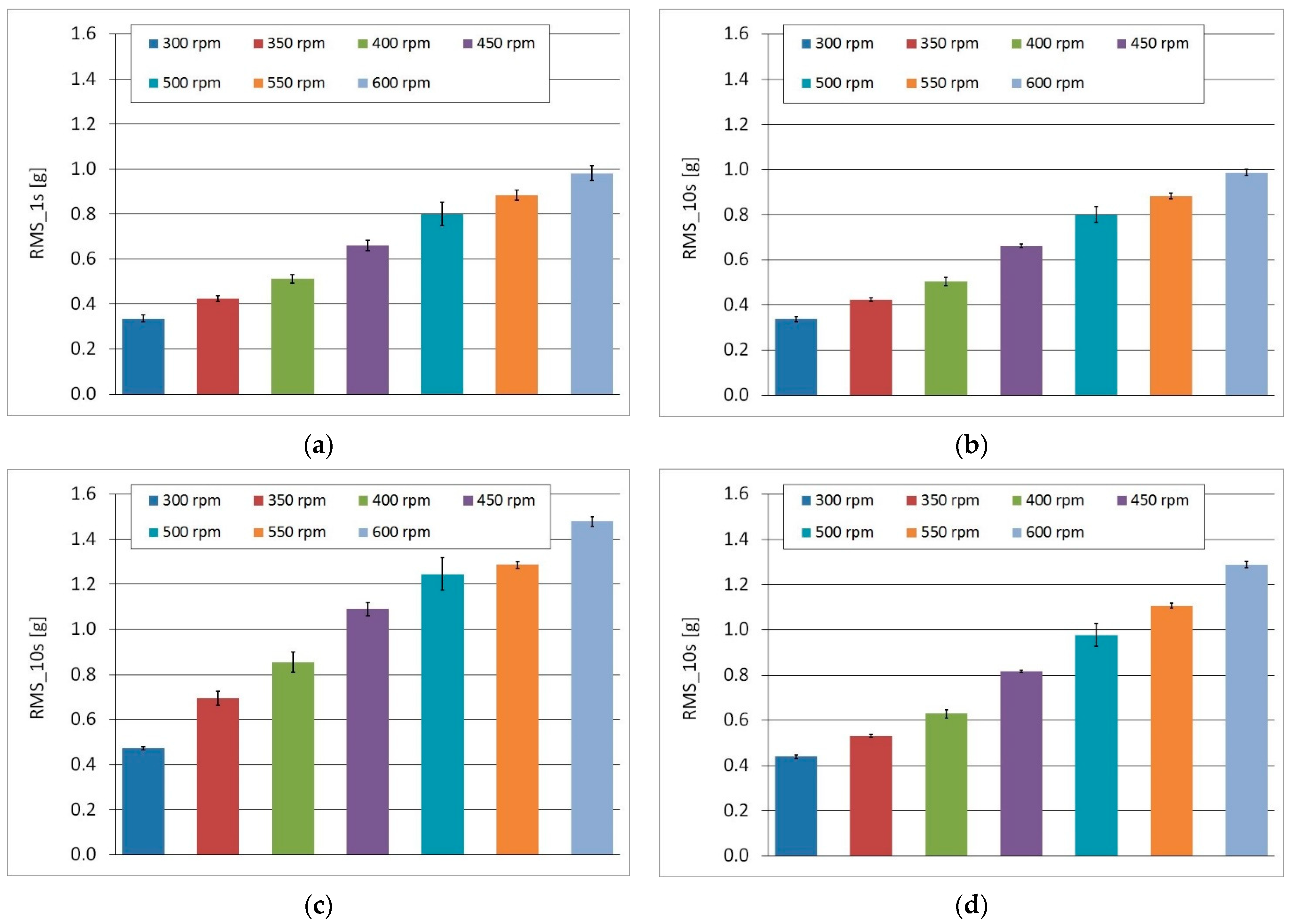
8.1. Time-Domain Measurements
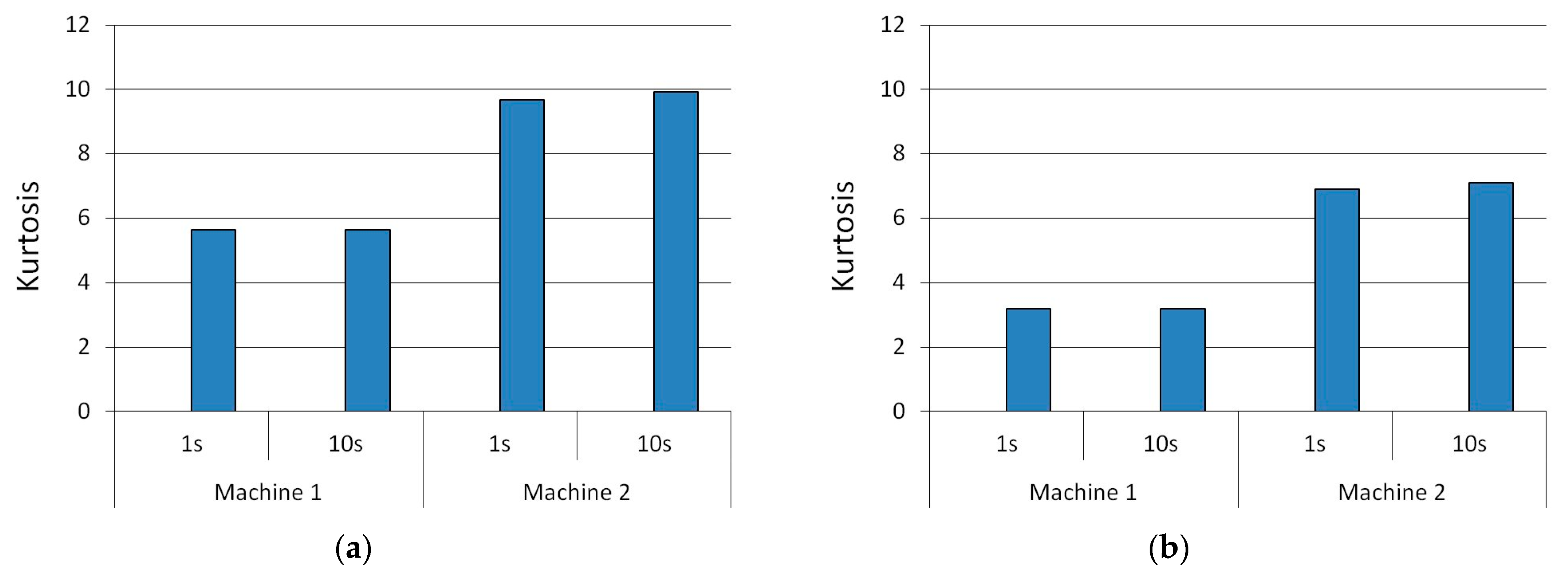
8.2. Spectral Analysis
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tiboni, M.; Remino, C.; Bussola, R.; Amici, C. A Review on Vibration-Based Condition Monitoring of Rotating Machinery. Appl. Sci. 2022, 12, 972. [Google Scholar] [CrossRef]
- Bucinskas, V.; Dzedzickis, A.; Sesok, N.; Iljin, I.; Sutinys, E.; Sumanas, M.; Morkvenaite-Vilkonciene, I. Automatic quality detection system for structural objects using dynamic output method: Case study Vilnius bridges. Struct. Health Monit. 2021, 1–13. [Google Scholar] [CrossRef]
- Mohamed, A.; Hassan, M.; M’Saoubi, R.; Attia, H. Tool Condition Monitoring for High-Performance Machining Systems—A Review. Sensors 2022, 22, 2206. [Google Scholar] [CrossRef] [PubMed]
- Nithin, S.K.; Hemanth, K.; Shamanth, V.; Mahale, R.S.; Sharath, P.C.; Patil, A. Importance of condition monitoring in mechanical domain. Mater. Today Proc. 2022, 54, 234–239. [Google Scholar] [CrossRef]
- Yaghootkar, B.; Azimi, S.; Bahreyni, B. Wideband piezoelectric mems vibration sensor. In Proceedings of the 2016 IEEE Sensors, Orlando, FL, USA, 30 October–2 November 2016. [Google Scholar] [CrossRef]
- Negrea, P. An Overview of Acceleration Detection in Inertial Navigation Systems. In Proceedings of the 2021 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 27–29 May 2021. [Google Scholar] [CrossRef]
- Liu, X.; Peng, K.; Chen, Z.; Pu, H.; Yu, Z. A New Capacitive Displacement Sensor with Nanometer Accuracy and Long Range. IEEE Sens. J. 2016, 8, 2306–2316. [Google Scholar] [CrossRef]
- Tian, B.; Liu, H.; Yang, N.; Zhao, Y.; Jiang, Z. Design of a Piezoelectric Accelerometer with High Sensitivity and Low Transverse Effect. Sensors 2016, 10, 1587. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chowdhury, M.; Islam, M.N.; Iqbal, M.Z.; Islam, S.; Lee, D.-H.; Kim, D.-G.; Jun, H.-J.; Chung, S.-O. Analysis of Over-turning and Vibration during Field Operation of a Tractor-Mounted 4-Row Radish Collector toward Ensuring User Safety. Machines 2020, 8, 77. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Ma, H.; Lozano-Galant, J.A.; Turmo, J. Development of a Low-Cost System for the Accurate Measurement of Structural Vibrations. Sensors 2021, 18, 6191. [Google Scholar] [CrossRef]
- Wondra, B.; Malek, S.; Botz, M.; Glaser, S.D.; Grosse, C. Wireless High-Resolution Acceleration Measurements for Struc-tural Health Monitoring of Wind Turbine Towers. Data-Enabled Discov. Appl. 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Manso, M.; Bezzeghoud, M. On-site Sensor Noise Evaluation and Detectability in Low Cost Accelerometers. In Proceedings of the 10th International Conference on Sensor Networks—SENSORNETS, Online Streaming, 9–10 February 2021; pp. 100–106. [Google Scholar] [CrossRef]
- Soto-Ocampo, C.R.; Mera, J.M.; Cano-Moreno, J.D.; Garcia-Bernardo, J.L. Low-Cost, High-Frequency, Data Acquisition System for Condition Monitoring of Rotating Machinery through Vibration Analysis-Case Study. Sensors 2020, 20, 3493. [Google Scholar] [CrossRef]
- Barusu, M.R.; Sethurajan, U.; Deivasigamani, M. Diagnosis of Bearing Outer Race Faults Using a Low-Cost Non-Contact Method with Advanced Wavelet Transforms. Elektron. Elektrotechnika 2019, 25, 44–53. [Google Scholar] [CrossRef] [Green Version]
- Samuelsen, D.A.H.; Graven, O.H. Highly configurable low cost remote laboratory with integrated support for learn-ing: Assessment of acquisition equipment. Int. J. Online Biomed. Eng. 2013, 9 (Suppl. S3), 38–43. [Google Scholar] [CrossRef] [Green Version]
- Koene, I.; Klar, V.; Viitala, R. IoT connected device for vibration analysis and measurement. HardwareX 2020, 7, e00109. [Google Scholar] [CrossRef] [PubMed]
- ISO 5348; Mechanical Vibration and Shock—Mechanical Mounting of Accelerometers. International Organization for Standardization: Geneva, Switzerland, 2021.
- ISO 16063-21; Methods for the Calibration of Vibration and Shock Transducers—Vibration Calibration by Comparison to a Reference Transducer. International Organization for Standardization: Geneva, Switzerland, 2003.
- ISO 16063-11; Methods for the Calibration of Vibration and Shock Transducers—Part 11: Primary Vibration Calibration by Laser Interferometry. International Organization for Standardization: Geneva, Switzerland, 1999.
- Li, R.-J.; Lei, Y.-J.; Chang, Z.-X.; Zhang, L.-S.; Fan, K.-C. Development of a High-Sensitivity Optical Accelerometer for Low-Frequency Vibration Measurement. Sensors 2018, 18, 2910. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Natale, E.; D’Emilia, G.; Gaspari, A. Dynamic calibration uncertainty of three-Axis low frequency accelerometers. Acta Imeko 2015, 4, 75–81. [Google Scholar] [CrossRef]
- Klaus, L.; Bruns, T.; Volkers, H. Calibration of Bridge-, Charge- and voltage amplifiers for dynamic measurement applications. Metrologia 2015, 52, 72. [Google Scholar] [CrossRef]
- Bruns, T.; Volkers, H. Efficient calibration and modelling of charge amplifiers for dynamic measurements. J. Phys. Conf. Ser. 2018, 1065, 222005. [Google Scholar] [CrossRef]
- Levinzon, F.A. Ultra-Low-Noise Seismic Piezoelectric Accelerometer with Integral FET Amplifier. IEEE Sens. J. 2012, 12, 2262–2268. [Google Scholar] [CrossRef]
- Levinzon, F.A. Ultra-Low-Noise Seismic Accelerometers for Earthquake Prediction and Monitoring. In Earthquakes—Tectonics, Hazard and Risk Mitigation; Zouaghi, T., Ed.; IntechOpen: London, UK, 2017. [Google Scholar] [CrossRef] [Green Version]
- D’Emilia, G.; Gaspari, A.; Mazzoleni, F.; Natale, E.; Schiavi, A. Calibration of tri-axial MEMS accelerometers in the low-frequency range—Part 1: Comparison among methods. J. Sens. Sens. Syst. 2018, 4, 245–257. [Google Scholar] [CrossRef] [Green Version]
- D’Emilia, G.; Gaspari, A.; Mazzoleni, F.; Natale, E.; Schiavi, A. Calibration of tri-axial MEMS accelerometers in the low-frequency range—Part 2: Uncertainty assessment. J. Sens. Sens. Syst. 2018, 7, 403–410. [Google Scholar] [CrossRef] [Green Version]
- AMC VIBRO Product Brochure. Available online: https://amcvibro.com/wp-content/uploads/2016/01/Brochure_AVM4000_EN_25.03.2020.pdf (accessed on 10 April 2022).
- SaMASZ Product Catalogue. Available online: https://www.samasz.pl/assets/files/prospekty-katalogi/SaMASZ-Przetrzasacze-i-zgrabiarki-ENG.pdf (accessed on 10 April 2022).
- Althubaiti, A.; Elasha, F.; Teixeira, J.A. Fault diagnosis and health management of bearings in rotating equipment based on vibration analysis—A review. J. Vibroeng. 2022, 24, 46–74. [Google Scholar] [CrossRef]
- Franco, S. Design with Operational Amplifiers and Analog Integrated Circuits, 3rd ed.; McGraw Hill: New York, NY, USA, 2015. [Google Scholar]
- Monitran MTN/2200-4P Series Product Brochure. Available online: https://pdf.directindustry.com/pdf/monitran/mtn-2200-4p/7101-616757.html (accessed on 11 May 2022).
- Manolakis, D.G.; Ingle, V.K. Applied Digital Signal Processing Theory and Practice; Cambridge University Press: London, UK, 2011. [Google Scholar]
- Cylindrical Proximity Sensor E2B Product Datasheet. Available online: https://assets.omron.eu/downloads/datasheet/en/v3/d116_e2b_cylindrical_proximity_sensor_datasheet_en.pdf (accessed on 11 May 2022).
- AN118 Silicon Labs. Improving ADC Resolution by Oversampling and Averaging. Available online: https://www.silabs.com/documents/public/application-notes/an118.pdf (accessed on 11 May 2022).
- DeCarlo, L.T. On the meaning and use of kurtosis. Psychol. Methods 1997, 2, 292–307. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Shan, H.; Lin, J. Early Fault Diagnosis of Bearings Using an Improved Spectral Kurtosis by Maximum Correlated Kurtosis Deconvolution. Sensors 2015, 15, 29363–29377. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Sensitivity [mV/g] | Range [g] | Bandwidth [Hz] | Spectral Noise at 100 Hz [mg/√Hz] |
|---|---|---|---|---|
| TE 820M1 | 50 (±30%) | ±25 | 2–10,000 | 0.070 |
| MEAS 810M1 | 50 (±30%) | ±25 | 2–6000 | 0.040 |
| ADXL356 | 80 | ±10 | 2400 | 0.075 |
| Sensor | m | u(m) | R2 | Se |
|---|---|---|---|---|
| TE 820M1 | 0.9694 | ±0.0175 | 0.9951 | 1.0016 |
| MEAS 810M1 | 1.0368 | ±0.0142 | 0.9972 | 0.8408 |
| ADXL356 | 0.9321 | ±0.0089 | 0.9986 | 0.5421 |
| FFT Computation Time [ms] | ||||
|---|---|---|---|---|
| Signal Sample Size N | AVR C Compiler | AVR Assembler | FFT Frequency Resolution [Hz] | FFT Computational Complexity |
| 32 | 4.63 | 1.44 | 312.5 | 80 |
| 64 | 8.86 | 3.75 | 156.25 | 192 |
| 128 | 17.72 | 7.82 | 78.12 | 448 |
| 256 | 35.91 | 15.44 | 39.06 | 1024 |
| 512 | 73.22 | 31.25 | 19.53 | 2304 |
| 1024 | 156.30 | 62.83 | 9.76 | 5120 |
| Sensor A0, x-Axis | Sensor A1, z-Axis | Sensor A2, z-Axis | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Rotational Speed ω [rpm] | RMS [g] | RMS-to Speed Ratio | Kurtosis 1 s | RMS [g] | RMS-to Speed Ratio | Kurtosis 1 s | RMS [g] | RMS-to Speed Ratio | Kurtosis 1 s |
| 300 | 0.3360 | 0.0016 | 3.7123 | 0.4727 | 0.0023 | 4.5151 | 0.4397 | 0.0021 | 3.2384 |
| 400 | 0.5125 | 0.0016 | 3.5629 | 0.8788 | 0.0027 | 5.6528 | 0.6399 | 0.0019 | 3.1866 |
| 500 | 0.8010 | 0.0017 | 3.6982 | 1.2381 | 0.0027 | 4.2937 | 0.9798 | 0.0021 | 3.2687 |
| 550 | 0.8856 | 0.0017 | 3.3869 | 1.2908 | 0.0024 | 3.7887 | 1.1106 | 0.0021 | 3.1356 |
| 600 | 0.9816 | 0.0016 | 3.2818 | 1.4740 | 0.0024 | 3.8324 | 1.2834 | 0.0021 | 3.0822 |
| Machine 1 | Machine 2 | |||||||
|---|---|---|---|---|---|---|---|---|
| Sensor A1, z-Axis | Sensor A2, z-Axis | Sensor A1, z-Axis | Sensor A2, z-Axis | |||||
| Rotational Speed ω [rpm] | KU 1 s | KU 10 s | KU 1 s | KU 10 s | KU 1 s | KU 10 s | KU 1 s | KU 10 s |
| 300 | 4.5151 | 4.5818 | 3.2384 | 3.2557 | - | - | - | - |
| 400 | 5.6528 | 5.6463 | 3.1866 | 3.1953 | 9.6731 | 9.9327 | 6.9006 | 7.1002 |
| 500 | 4.2937 | 4.2811 | 3.2687 | 3.2695 | - | - | - | - |
| 550 | 3.7887 | 3.7870 | 3.1356 | 3.1335 | - | - | - | - |
| 600 | 3.8324 | 3.8476 | 3.0822 | 3.0854 | - | - | - | - |
| Machine 1 | Machine 2 | |||||||
|---|---|---|---|---|---|---|---|---|
| Sensor A1, z-Axis | Sensor A2, z-Axis | Sensor A1, z-Axis | Sensor A2, z-Axis | |||||
| Rotational Speed ω [rpm] | CF 1 s | CF 10 s | CF 1 s | CF 10 s | CF 1 s | CF 10 s | CF 1 s | CF 10 s |
| 400 | 5.9640 | 6.1619 | 4.2333 | 4.2991 | 9.5097 | 10.0555 | 7.2260 | 7.5820 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mystkowski, A.; Kociszewski, R.; Kotowski, A.; Ciężkowski, M.; Wojtkowski, W.; Ostaszewski, M.; Kulesza, Z.; Wolniakowski, A.; Kraszewski, G.; Idzkowski, A. Design and Evaluation of Low-Cost Vibration-Based Machine Monitoring System for Hay Rotary Tedder. Sensors 2022, 22, 4072. https://doi.org/10.3390/s22114072
Mystkowski A, Kociszewski R, Kotowski A, Ciężkowski M, Wojtkowski W, Ostaszewski M, Kulesza Z, Wolniakowski A, Kraszewski G, Idzkowski A. Design and Evaluation of Low-Cost Vibration-Based Machine Monitoring System for Hay Rotary Tedder. Sensors. 2022; 22(11):4072. https://doi.org/10.3390/s22114072
Chicago/Turabian StyleMystkowski, Arkadiusz, Rafał Kociszewski, Adam Kotowski, Maciej Ciężkowski, Wojciech Wojtkowski, Michał Ostaszewski, Zbigniew Kulesza, Adam Wolniakowski, Grzegorz Kraszewski, and Adam Idzkowski. 2022. "Design and Evaluation of Low-Cost Vibration-Based Machine Monitoring System for Hay Rotary Tedder" Sensors 22, no. 11: 4072. https://doi.org/10.3390/s22114072
APA StyleMystkowski, A., Kociszewski, R., Kotowski, A., Ciężkowski, M., Wojtkowski, W., Ostaszewski, M., Kulesza, Z., Wolniakowski, A., Kraszewski, G., & Idzkowski, A. (2022). Design and Evaluation of Low-Cost Vibration-Based Machine Monitoring System for Hay Rotary Tedder. Sensors, 22(11), 4072. https://doi.org/10.3390/s22114072