1. Introduction
With the intensifying of the energy crisis and environmental pollution, many government departments have formulated increasingly strict regulations to limit vehicle energy consumption and pollutant emissions [
1]. EVs are considered to be a suitable substitute for traditional vehicles because of the environmental protection, low noise, and small operating costs [
2,
3], which have received acute attention from automakers and consumers.
Nowadays, single-speed transmissions are used in most mass-produced EVs to save costs, such as the Volkswagen e-Golf, Nissan Leaf, and others [
4]. However, since the ability to adjust the motor is very limited, the single-speed transmission sacrifices some energy economy [
5]. To further improve the overall efficiency, experts and scholars have begun to study the application of multi-speed transmissions to EVs. Several studies have shown that two-speed and other multi-speed transmissions can improve the transmission efficiency of EVs, thereby enhancing vehicle dynamics [
6,
7,
8,
9]. Some scholars developed novel multi-speed transmissions for EVs to improve vehicle energy economy [
10,
11,
12]. Additionally, the shift strategy of multi-speed transmission has also become the focus of research, and a variety of shift strategies for multi-speed transmission have been proposed in the literature [
13,
14,
15]. Corresponding controllers have been developed to enhance vehicle efficiency and improve driving comfort. As can be seen from the above documents, multi-speed has become an inevitable trend for transmission for EVs. Some developed EVs have recently begun to apply multi-speed transmissions, such as BMW i8 and Volvo XC90 [
16].
The CVT can realize the continuous change of ratio within a certain speed ratio range. The characteristics of continuously variable ratio can adjust the motor operating point more flexibly, improving vehicle energy economy [
17]. The literature [
18,
19] compares CVT and multi-speed transmissions through simulation. The results show that CVT is the most potential and ideal transmission for EVs. However, the study did not consider the effect of CVT efficiency, which resulted in a low energy-saving effect. Ruan et al. compared the impact of different transmissions on the performance and cost of EVs through simulation. EVs with CVT show lower energy consumption and stronger power, while CVT can save customers’ money from a long-term perspective [
4,
20]. Research [
21] compared CVT and single-speed transmission through experiments and found that CVT brings a 4.3% reduction in energy consumption for EVs. In addition, some scholars design CVT speed ratio control strategies to improve the transmission system efficiency for EVs [
17,
22]. The existing research on electric CVT focuses on the qualitative comparative analysis of different transmissions, few pieces of literature conduct in-depth research on the efficiency of CVT for EVs. However, the CVT efficiency is between 75% and 90% depending on the work conditions [
23]. The impact of CVT efficiency on the energy consumption of EVs cannot be ignored, which is necessary to conduct relevant research.
The slip characteristic is an inherent characteristic of the metal belt CVT. Proper slip can improve the CVT efficiency, while excessive slip would cause damage to the CVT. How to make the CVT work in the high-efficiency slip range has always been the focus of CVT research. In recent years, more and more scholars have conducted research on slip control methods. Asayama et al. and Kobyyashi et al. conducted research from the perspective of theory and experimentation by analyzing the relationship between clamping force and slip rate [
24,
25]. Kim et al. investigated the metal V-belt behavior of CVT both analytically and experimentally. They obtained the ratio-torque load-axial force relationship and found that the torque transfer capability of the driven side determines the overall slip [
26]. Nishizawa et al. studied the friction characteristics between the CVT metal belt and the pulley and proposed a friction model and obtained the power transmission state near the macro slip limit [
27]. Tarutani et al. established an effective model of CVT load distribution, analyzed the influence of slip velocity on power transmission, and verified the validity of the calculation results through experiments [
28]. Bonsen et al. and Klaassen et al. studied the slip characteristics of metal belts by combining theory with experiments. They propose a CVT slip model and develop corresponding slip control controllers. The research results show that controlling the slip can improve CVT efficiency [
29,
30,
31]. In the literature [
32,
33,
34,
35], various controllers such as the adaptive PI controller and LQR controller are designed to improve the effect of slip control. Simulation results show that the designed controller can improve the efficiency of CVT without losing robustness. Additionally, Zhu et al. established a vehicle driving state identification method and analyzed the feasibility of slip control in unsteady states. They proposed a clamping force control method in the unsteady states and verified the method through experiments [
36]. Ji et al. studied the power transfer characteristics under different slip regions under external vibration conditions. The results indicate that there are differences in the external vibration transfer characteristics between the micro-slip region and the macro-slip region [
37]. The mentioned documents mostly study CVT slip characteristics separately from experiments or combine CVT slip control with traditional vehicles, and few studies combine EVs with CVT slip control for efficiency optimization research.
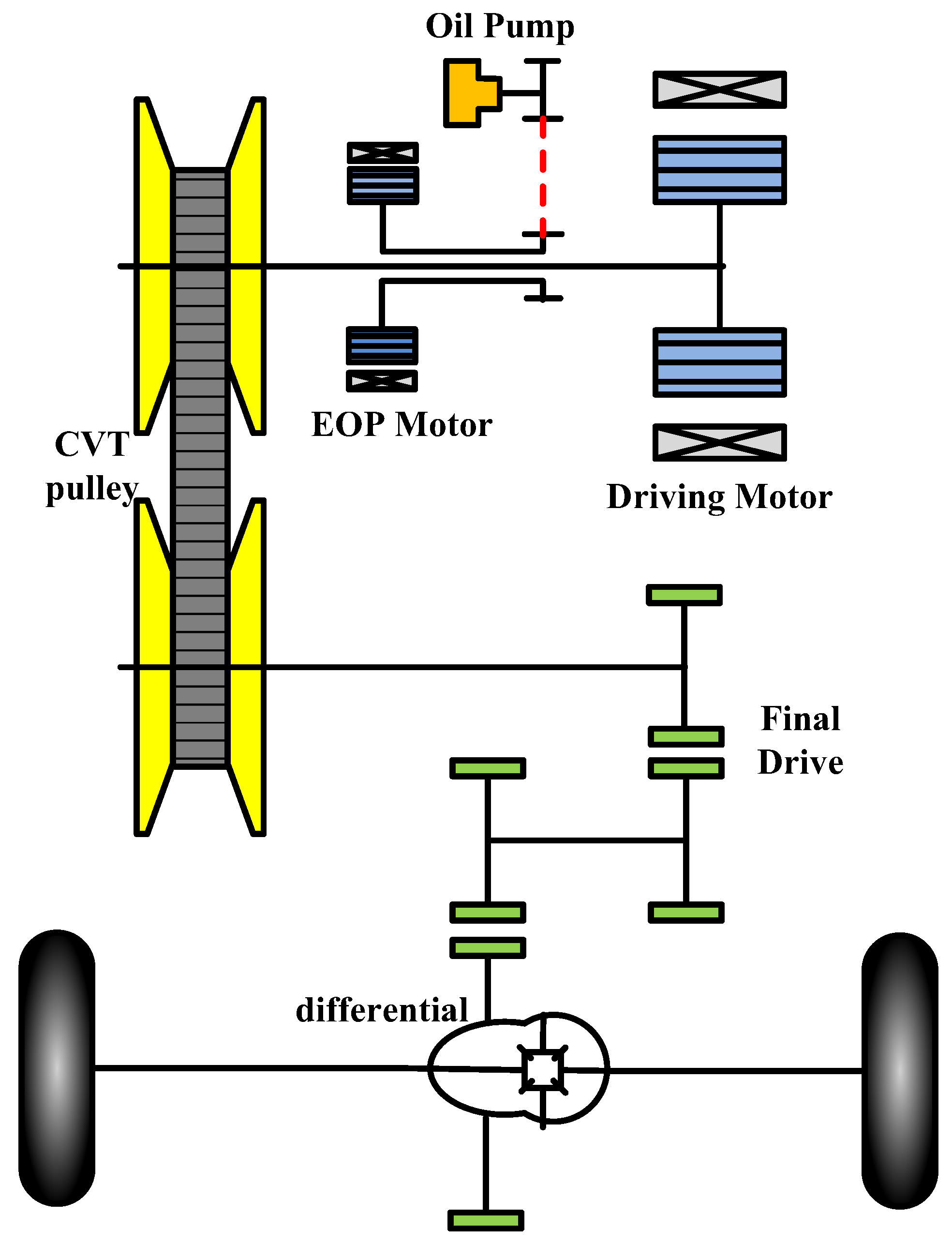
This paper presents a pure electric CVT configuration, and a clamping force fuzzy control strategy based on slip characteristics. CVT slip dynamic model and vehicle simulation model are established. The feasibility of the proposed clamping force control strategy and the superiority over the traditional clamping force control strategy are verified by simulation. The structure of this article is as follows:
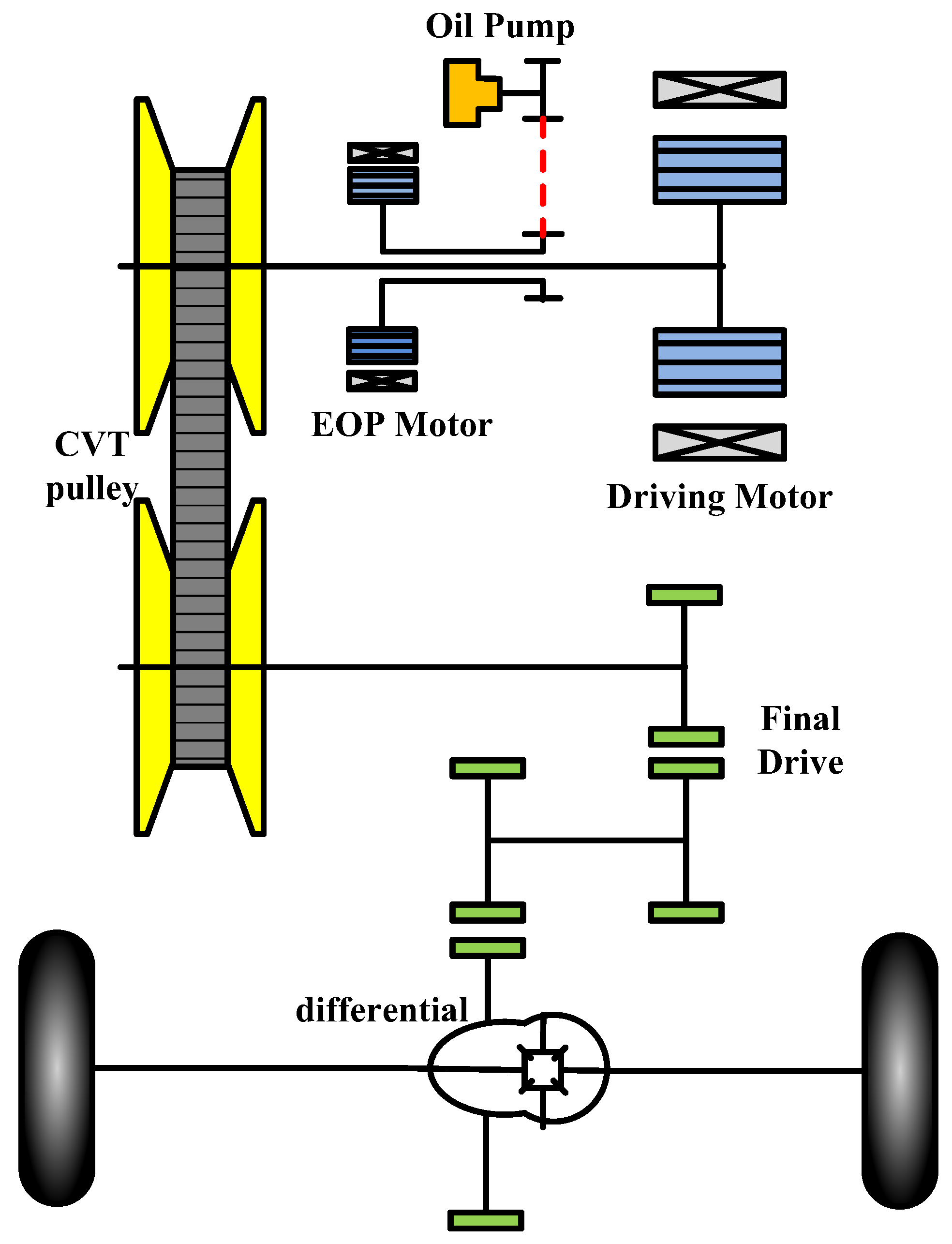
Section 2 introduces the configuration of pure electric CVT.
Section 3 describes the slip principle of belt CVT.
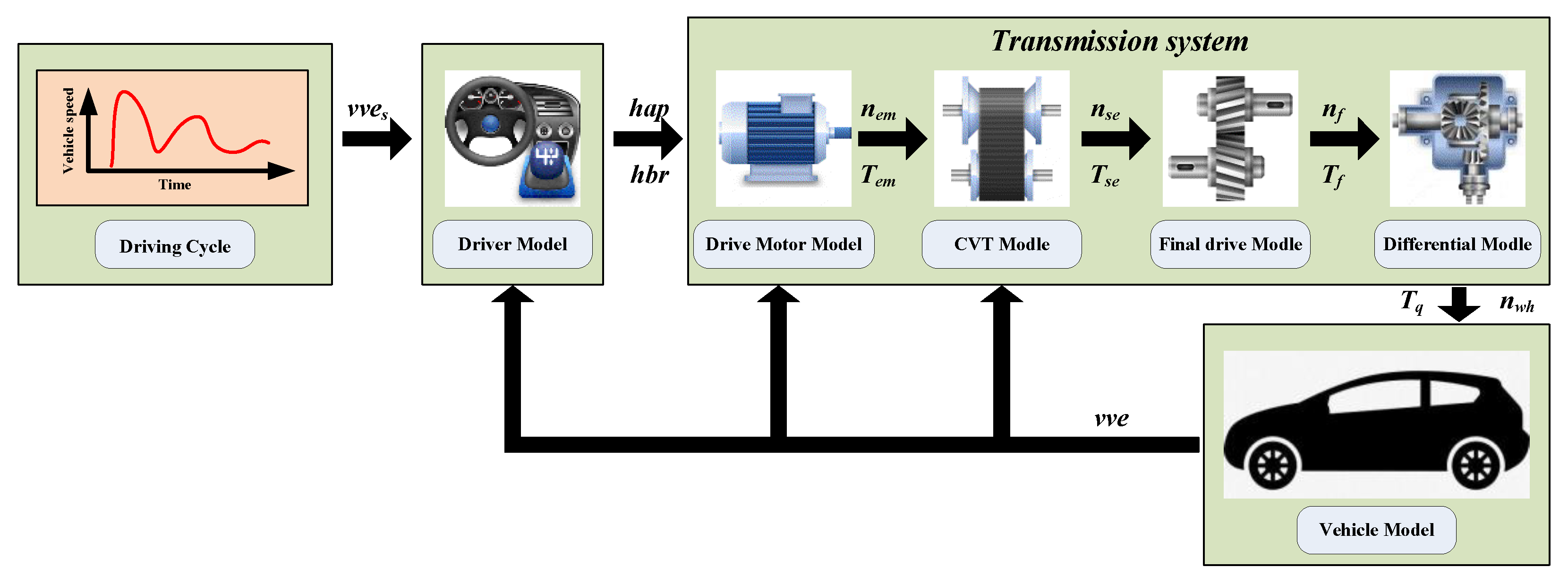
Section 4 accomplishes CVT slip dynamic model and vehicle model modeling.
Section 5 performs the slip characteristic test.
Section 6 describes the CVT clamping force control strategy.
Section 7 analyzes and discusses the simulation results. Finally, the conclusion is summarized in
Section 8.
3. Belt CVT Slip Principle
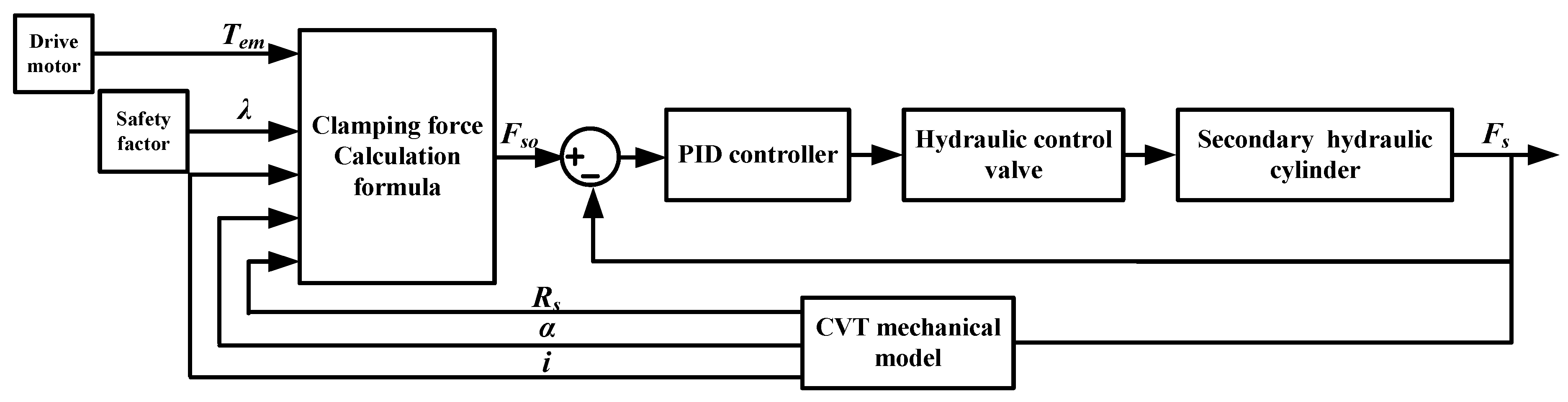
The metal belt CVT transmission mode is friction transmission. The clamping forces of the hydraulic cylinders exert on the primary and secondary pulleys, and the metal belt transmits torque from the primary side to the secondary side through friction. To ensure the reliability of power transmission, the following formula is generally used to calculate the clamping force of the secondary pulley:
where
Fse is the secondary clamping force,
Sfr is the safety factor,
Tpm is the transmitted torque,
α is the cone angle of the pulley,
μ is the friction coefficient between metal belt and cone plate, and
Rse is the effective radius of the secondary pulley.
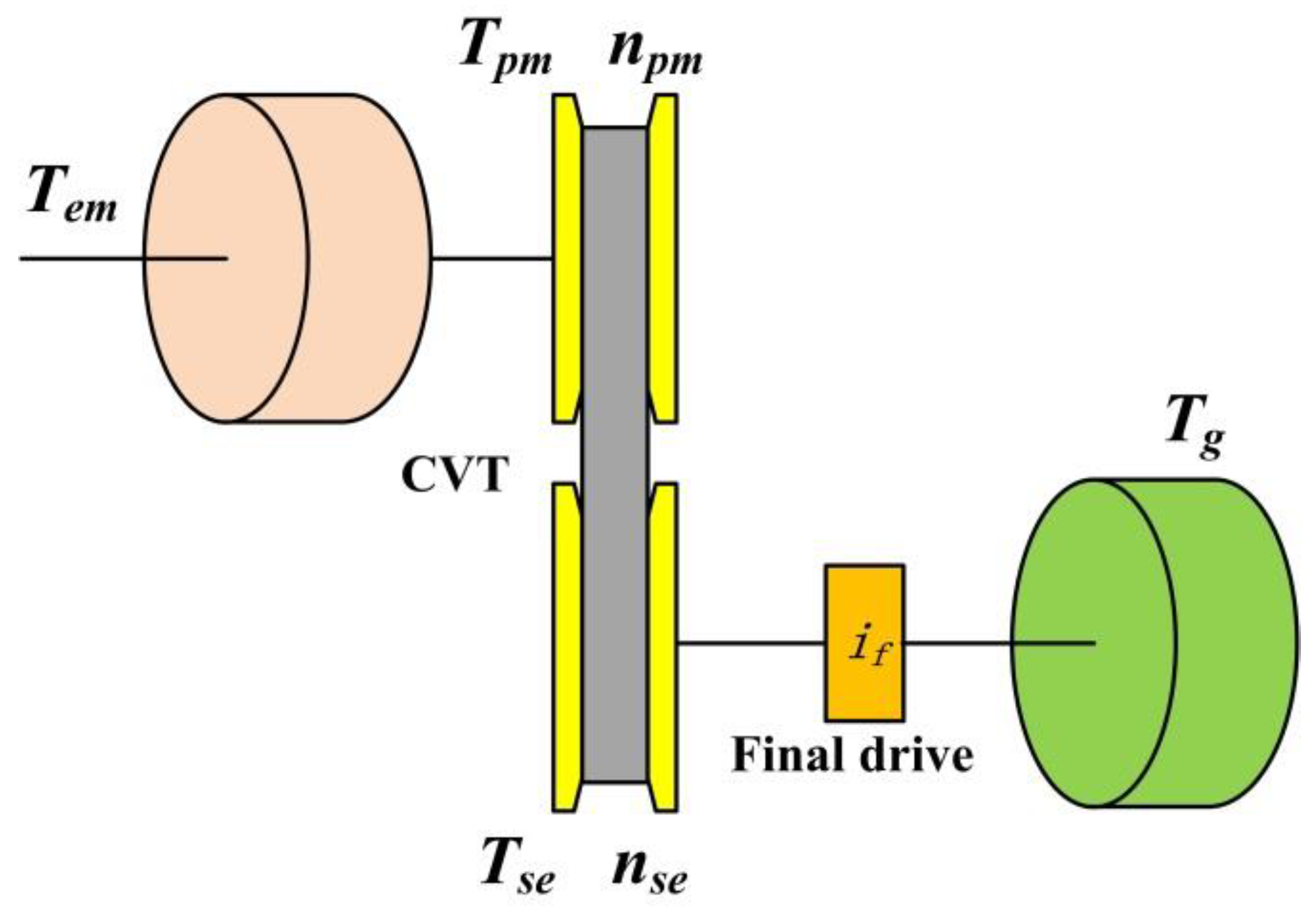
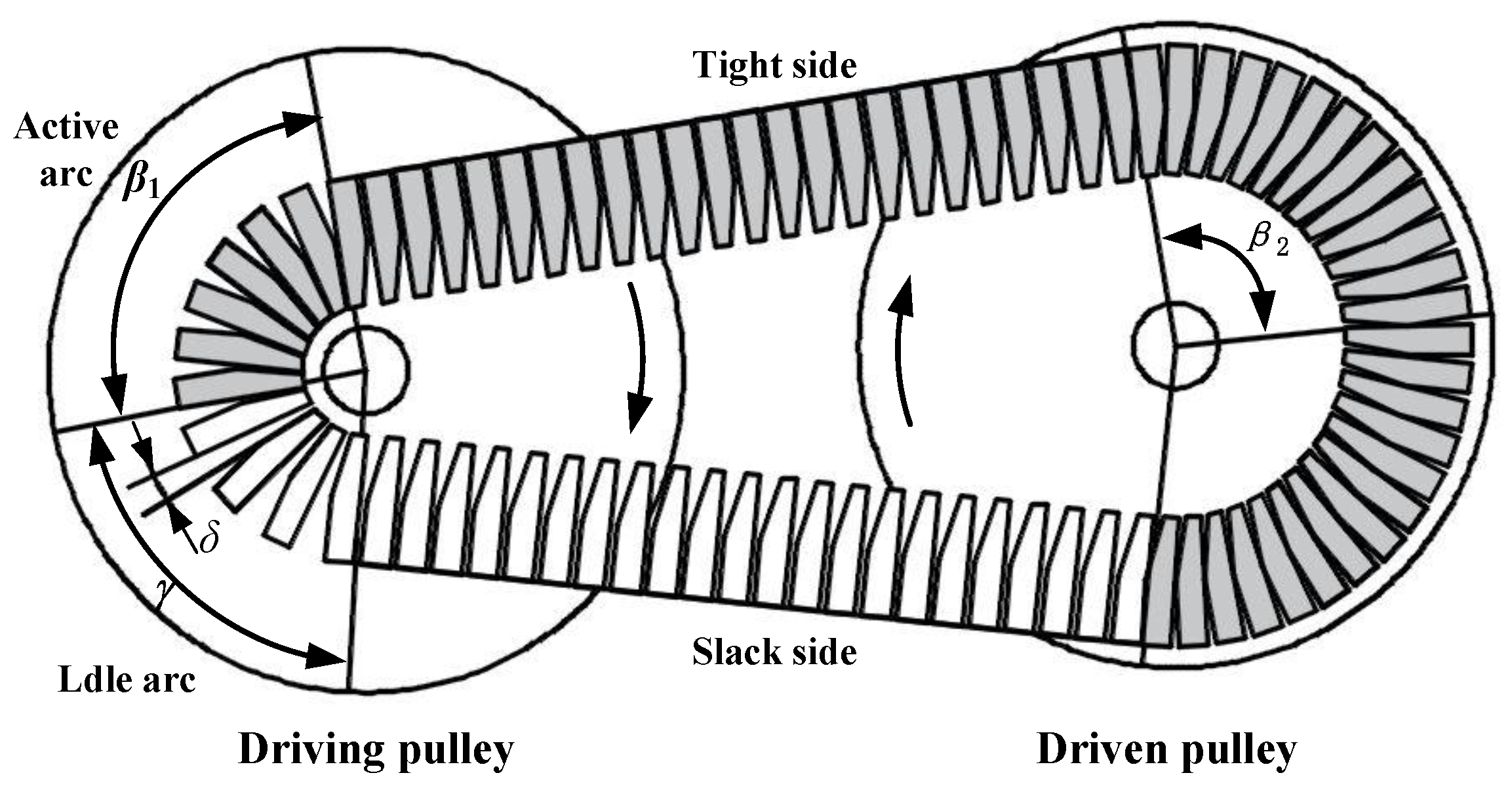
In the process of metal belt transmission, the metal belt can be divided into two states in the pulley envelope: active arc and idle arc, and the metal belt is divided into the tight side and slack side, as shown in
Figure 3.
There is a squeezing force between the metal sheets at the tight side, while the slack side has no squeezing force. Due to the gap inconsistency between the tight side and slack side, the pulley will slip during transmission [
25]. The slip rate s can be expressed as:
where
ir is the speed ratio without load, and
io is the actual speed ratio,
npm is the primary pulley speed, and
nse is the secondary pulley speed.
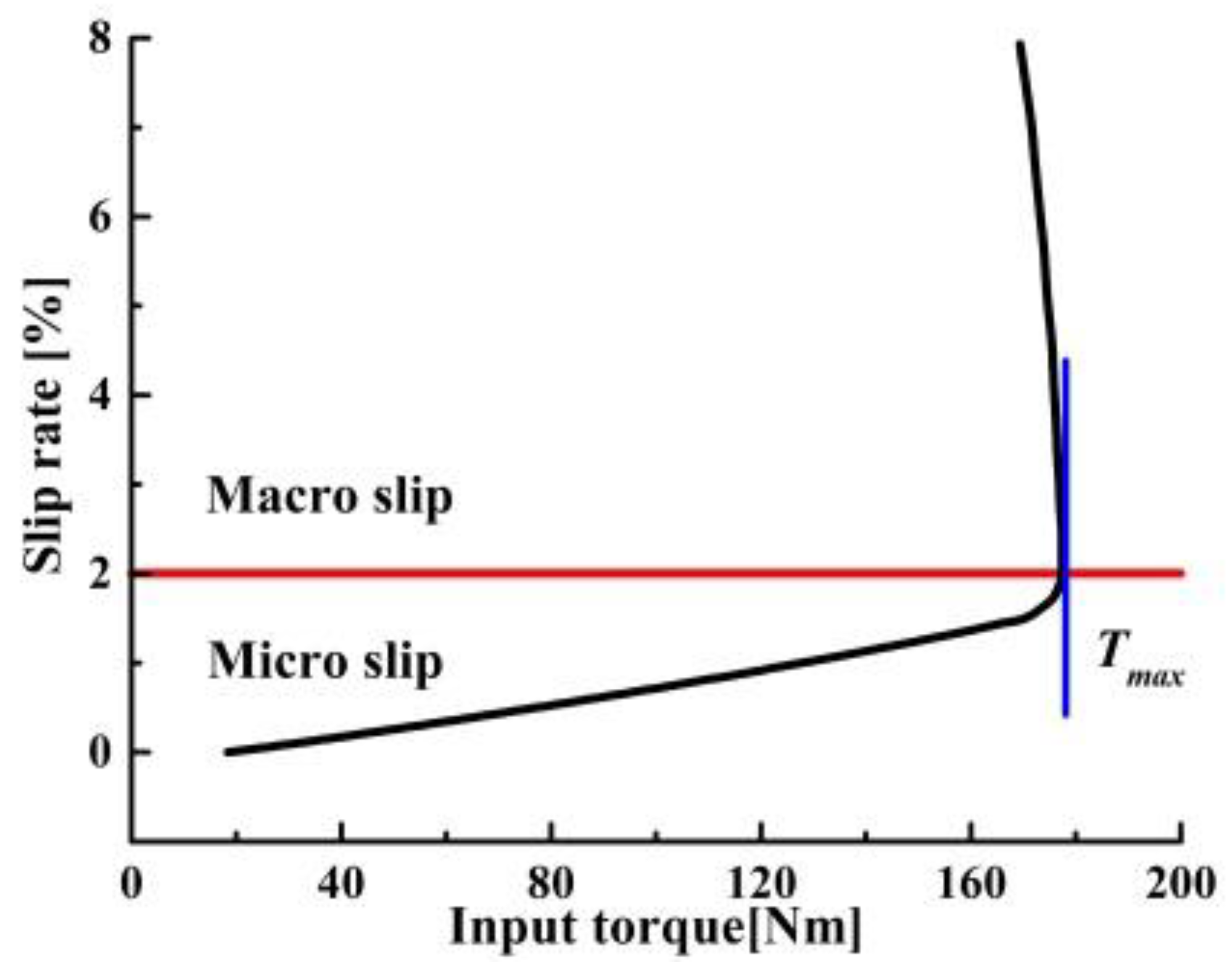
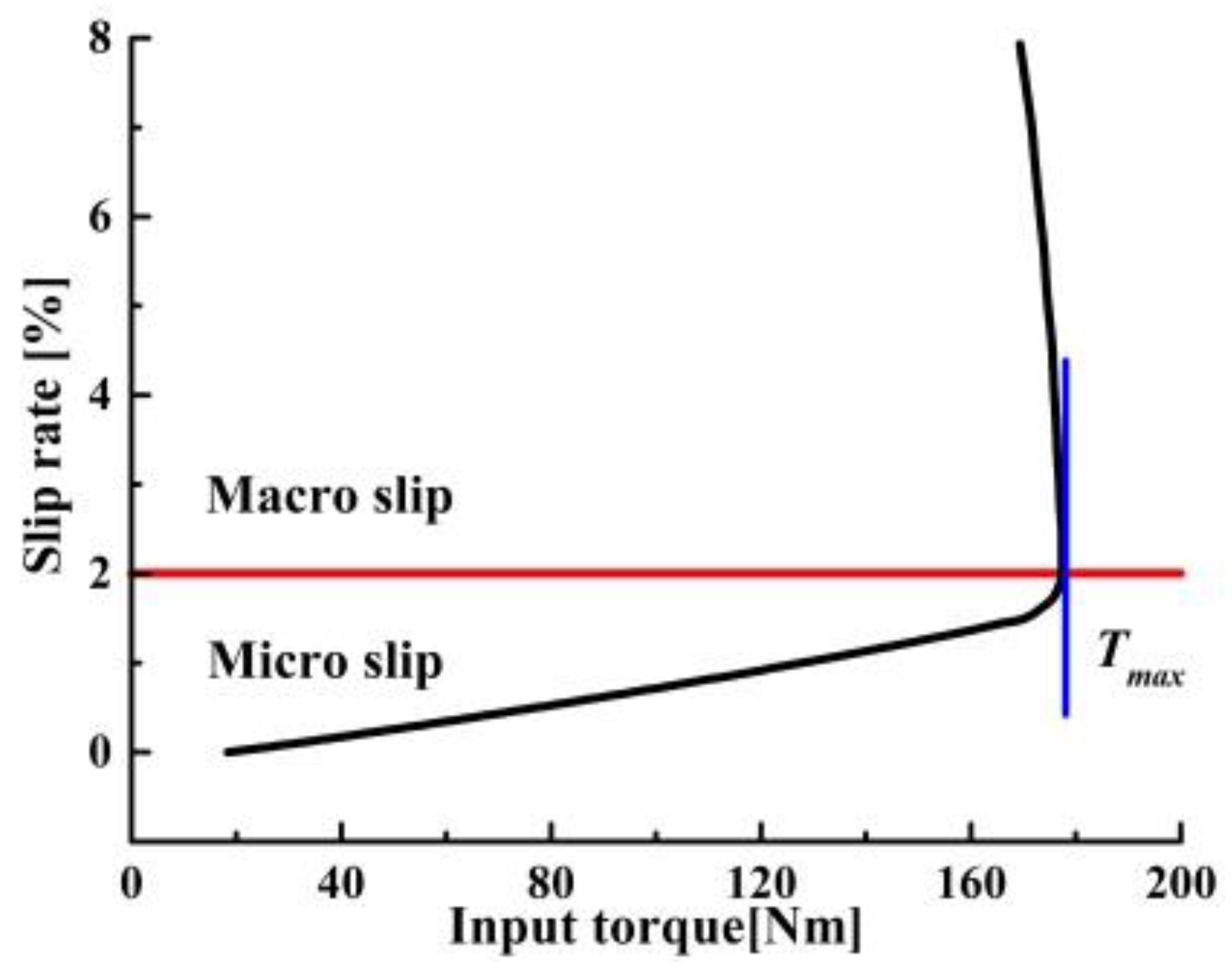
When the clamping force is constant, DROGEN et al. divided the CVT slip into the macro slip and micro slip under the condition of certain clamping force [
38], as shown in
Figure 4. Macro slip is commonly referred to as metal belt slip. It could cause rapid wear of the steel belt and affect the transmission, which should be avoided as much as possible.
5. CVT Slip-Efficiency Characteristic Test
Within a certain slip rate, the friction coefficient and the mechanical efficiency of CVT show the same trend-first increase to the peak and then decrease [
27,
28]. Thus, the efficiency can be improved by reasonably controlling CVT slip. To design a clamping force control strategy, it is necessary to obtain accurate CVT slip characteristics and their relationship with efficiency. Therefore, a slip characteristic test bench was built.
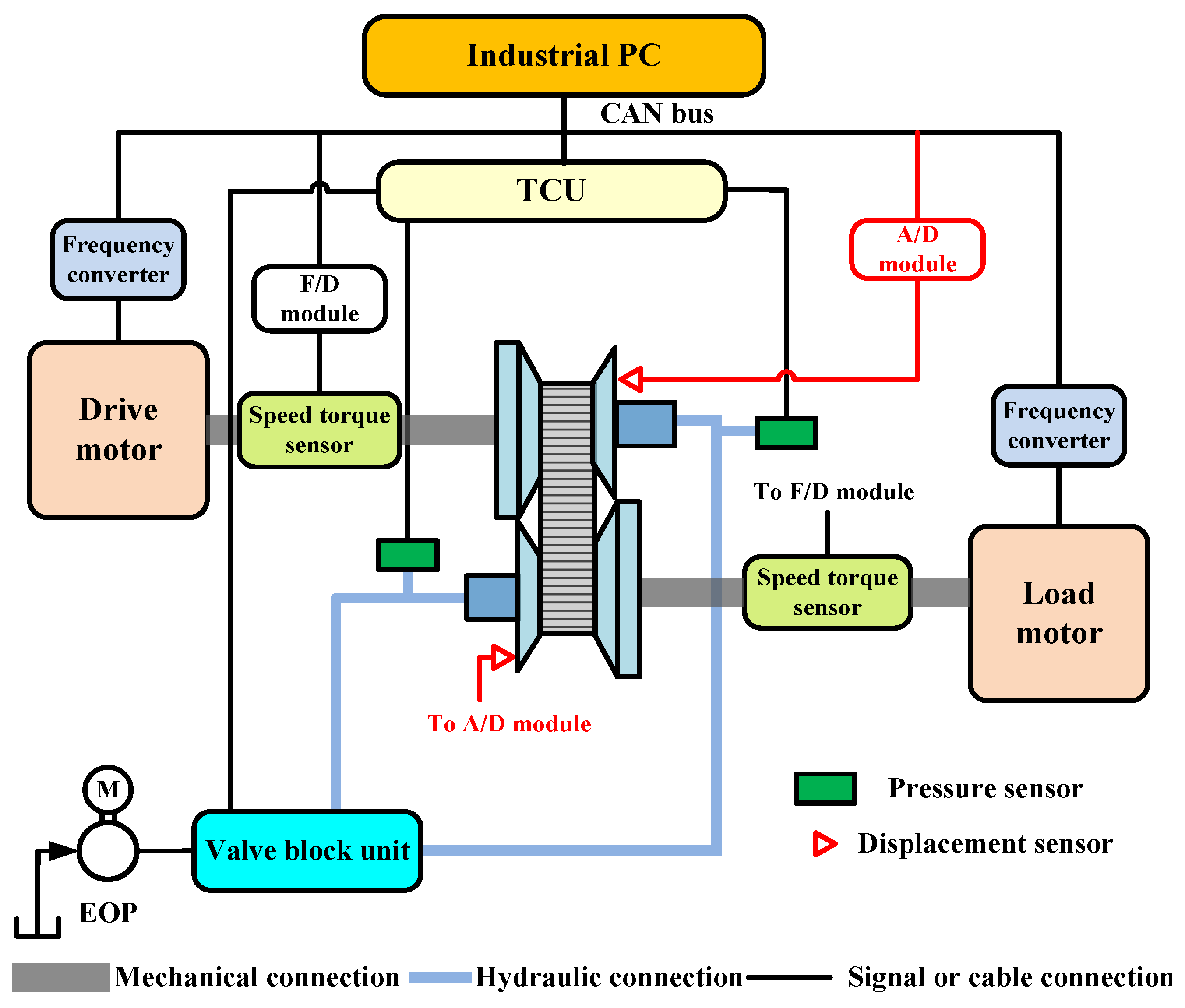
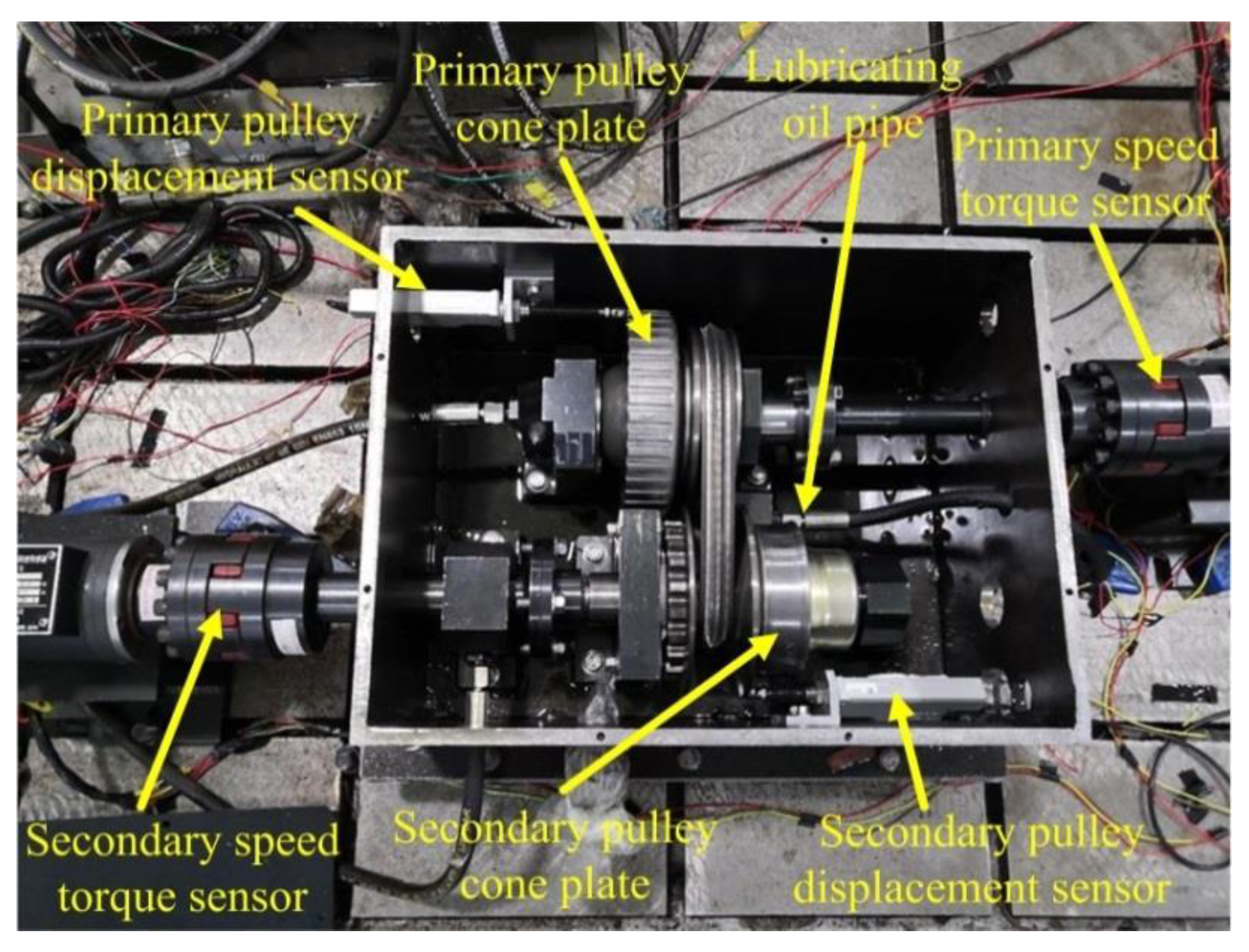
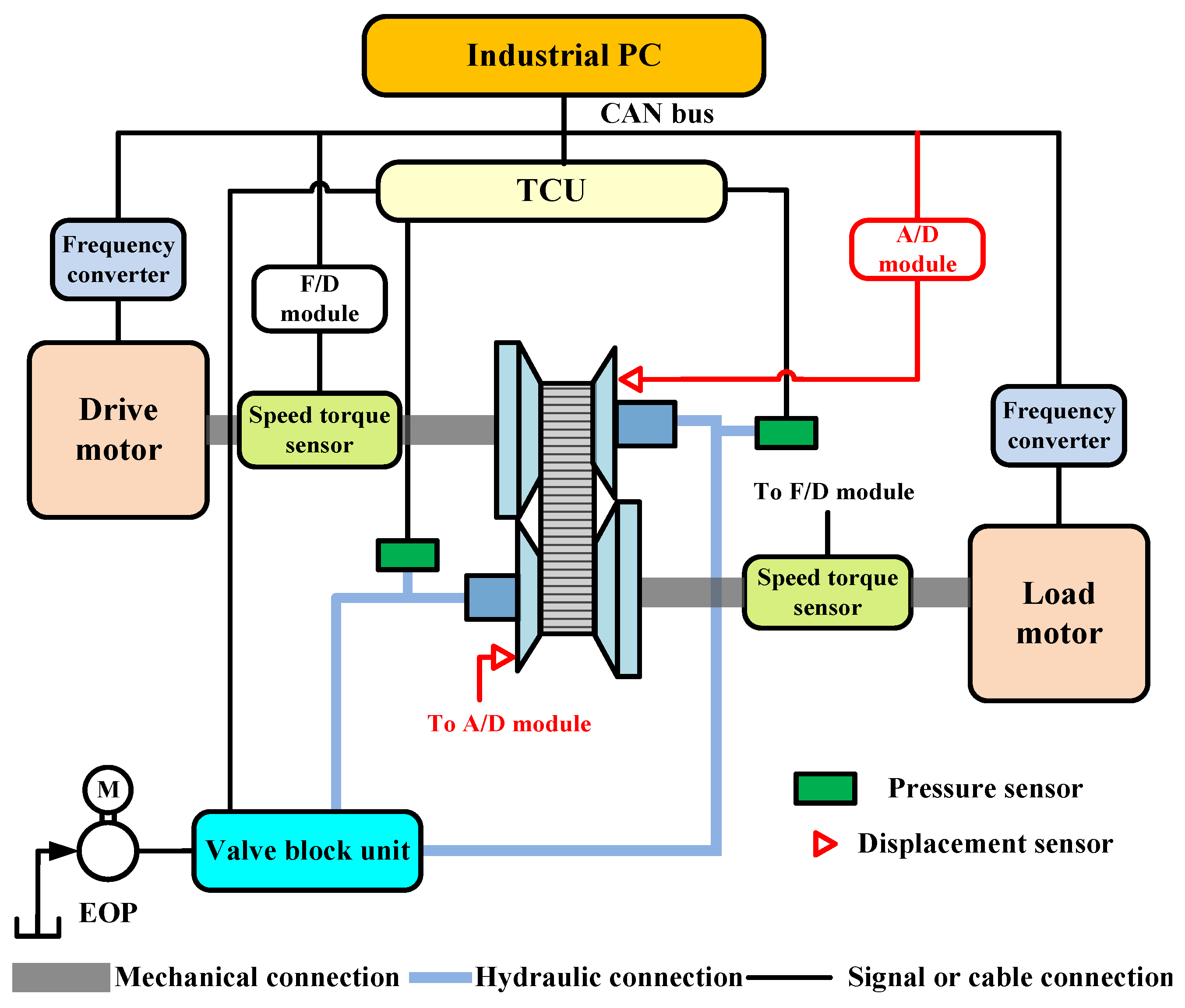
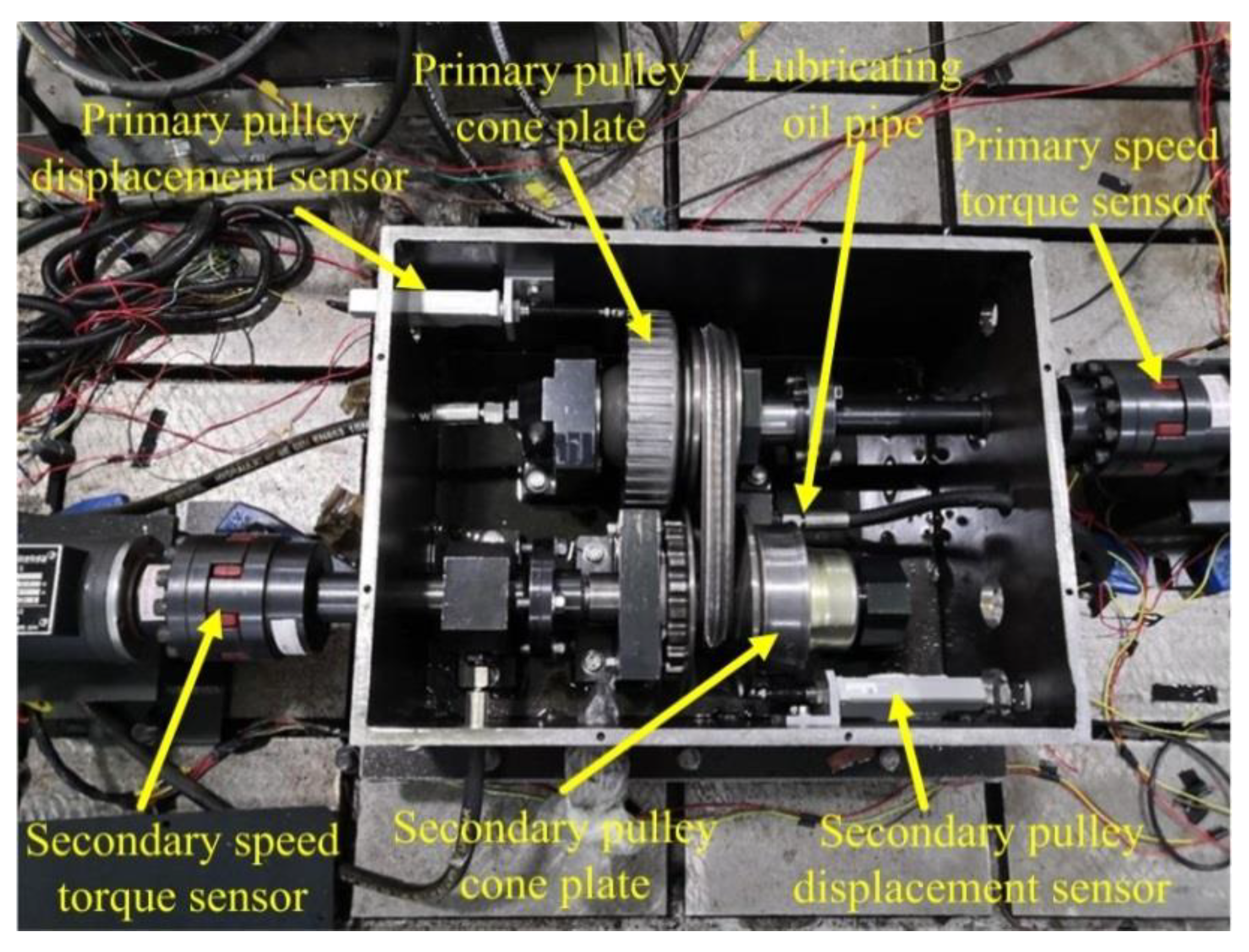
Figure 7 is the schematic diagram of the test bench, and the actual slip test bench is shown in
Figure 8. The test device is mainly composed of drive motor, load motor, CVT, TCU, various sensors, and data acquisition system. The drive motor shaft is directly connected to the primary pulley, and the load motor simulates the road load. Considering the influence of oil temperature on the efficiency of CVT, the oil temperature was stabilized at 90 ± 5 °C during the experiment.
The experimental transmission is a Chinese company self-developed CVT. CVT-related parameters are given in
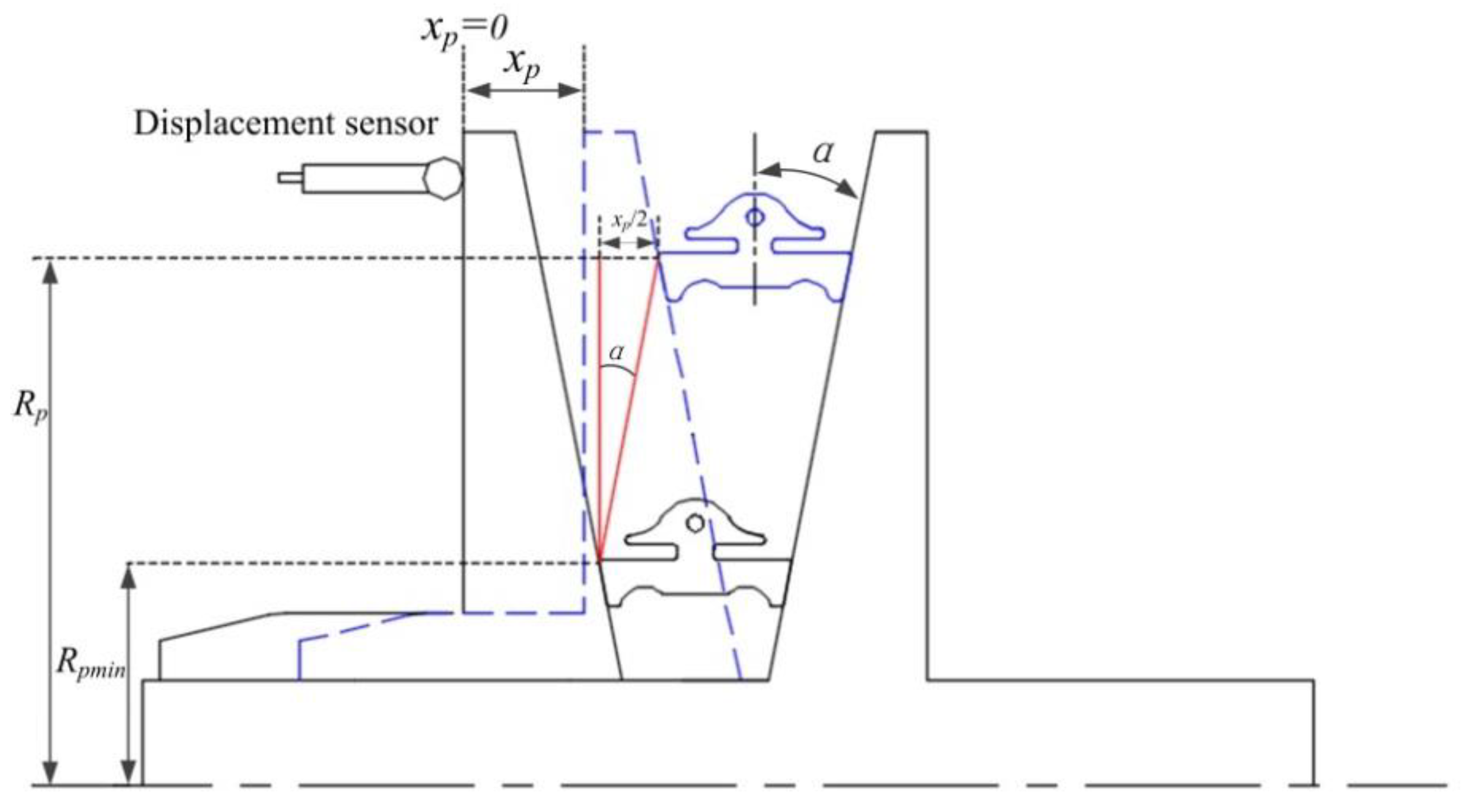
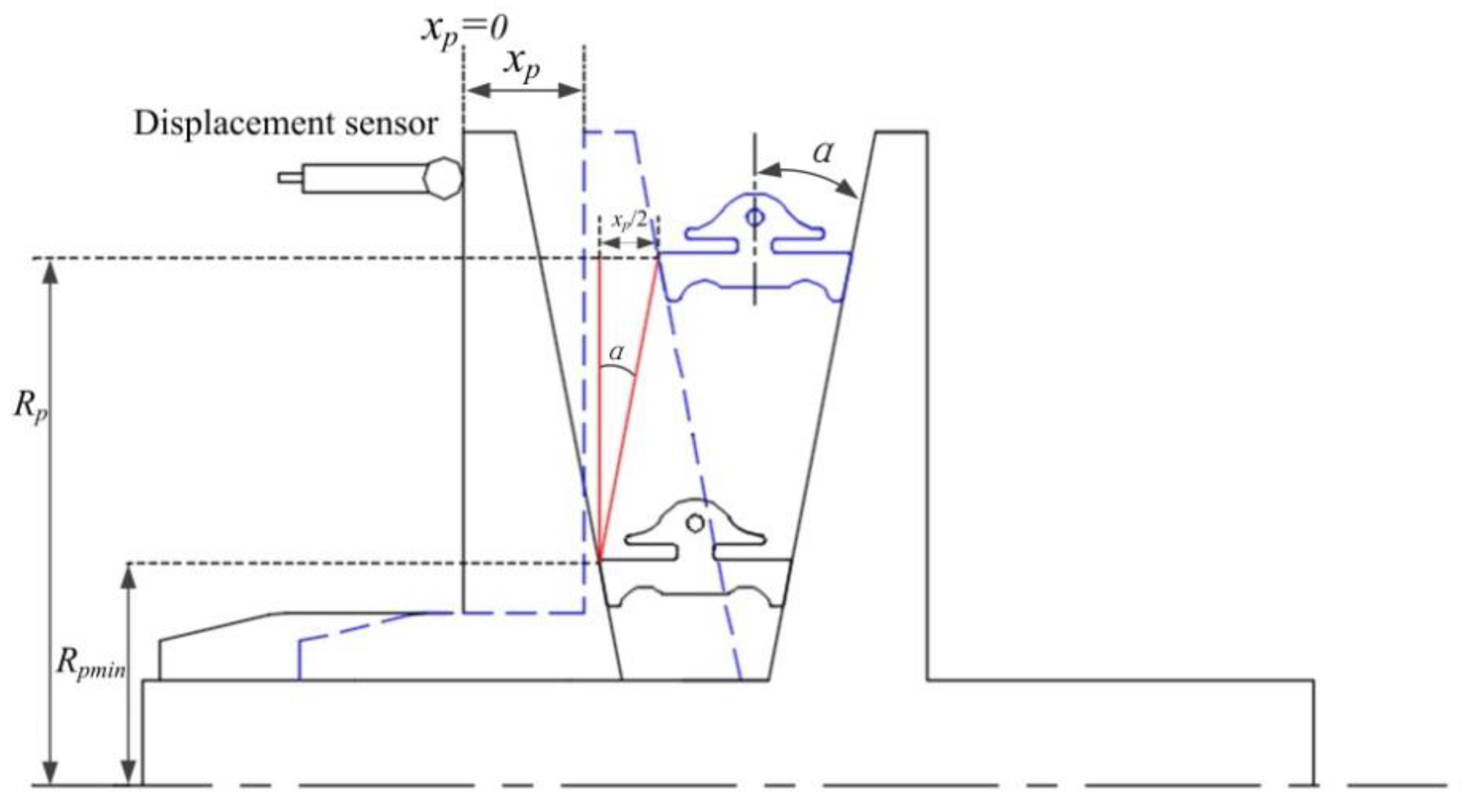
Table 1. The slip rate is defined by the geometric speed ratio and the actual speed ratio, as shown in Equation (2). During the experiment, the actual speed ratio is calculated by data from the primary and secondary speed sensors. The geometric speed ratio is the ratio of the radius of the primary and secondary pulley, which cannot be obtained directly. It can be calculated indirectly through the axial displacement of primary and secondary cone plates measured by the displacement sensors. Here, the calculation of the radius of the primary pulley is taken as an example, as shown in
Figure 9. The specifications and parameters of various sensors and other components are shown in
Table 2. The actual radius of the primary and secondary pulley can be expressed as:
where
xp and
xs are the displacement of the movable cone plate of the primary and secondary pulleys.
Rpmin and
Rsmin are the radius of the primary and secondary pulleys when
xp = 0 and
xs = 0.
Based on the consideration of the typical working conditions of CVT, the efficiency characteristic tests under different speed ratios, input speeds, and torques were carried out, respectively. The setting of working conditions is shown in
Table 3. In the test, the speed and torque of the drive motor and the load motor are measured by the speed-torque sensors, and the CVT efficiency is calculated by the following formula:
where
Te1 and
Te2 are the torque of the drive motor and load motor, and
ne1 and
ne2 are the speed of the drive motor and load motor.
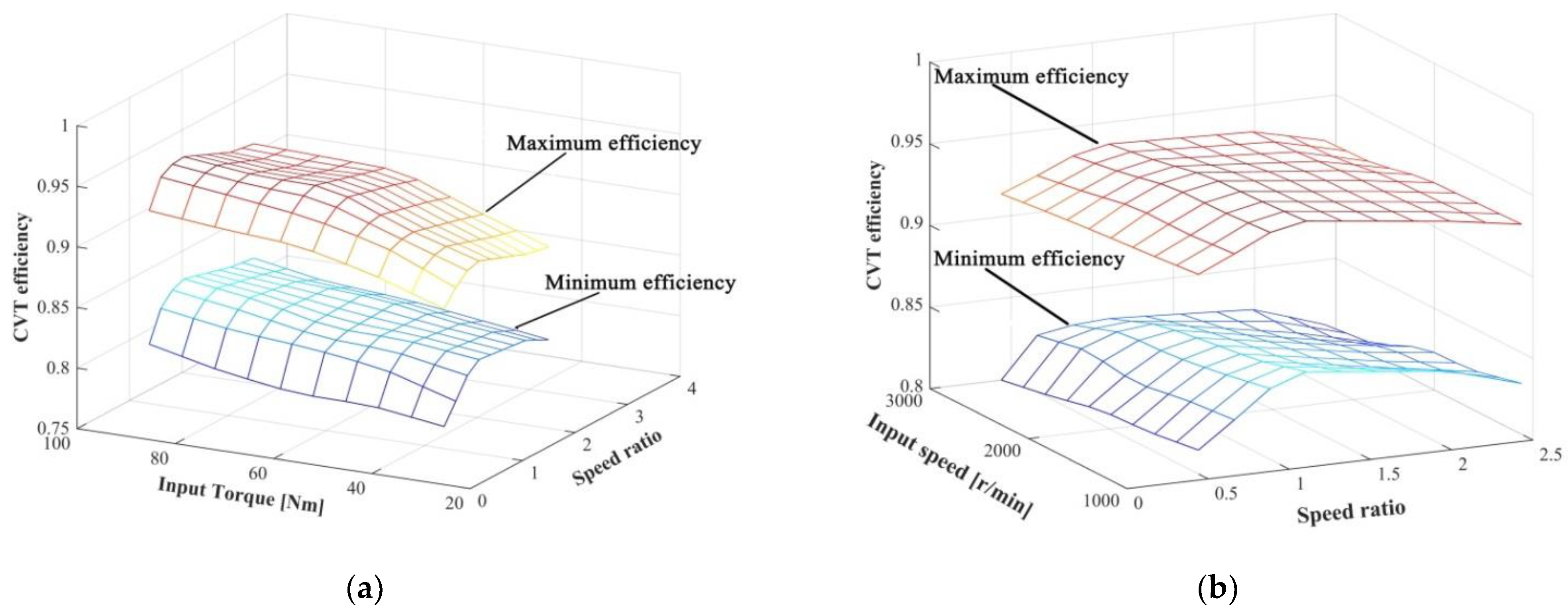
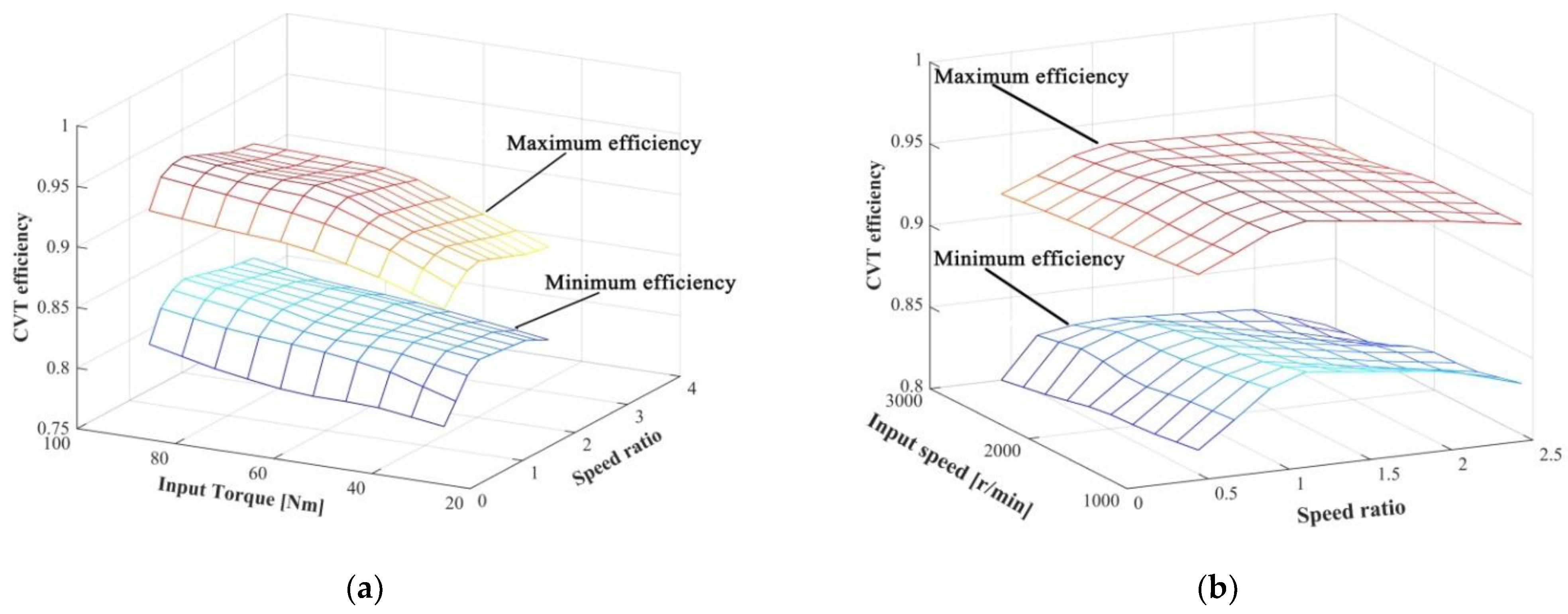
Figure 10 shows the minimum and maximum efficiency of the transmission mechanism under different test conditions. It can be seen from the Figure that there is a margin of 5–10% between the minimum and maximum efficiency within the slip region. This indicates that the slip has a significant impact on CVT efficiency, and the CVT efficiency can be improved by controlling the slip rate.
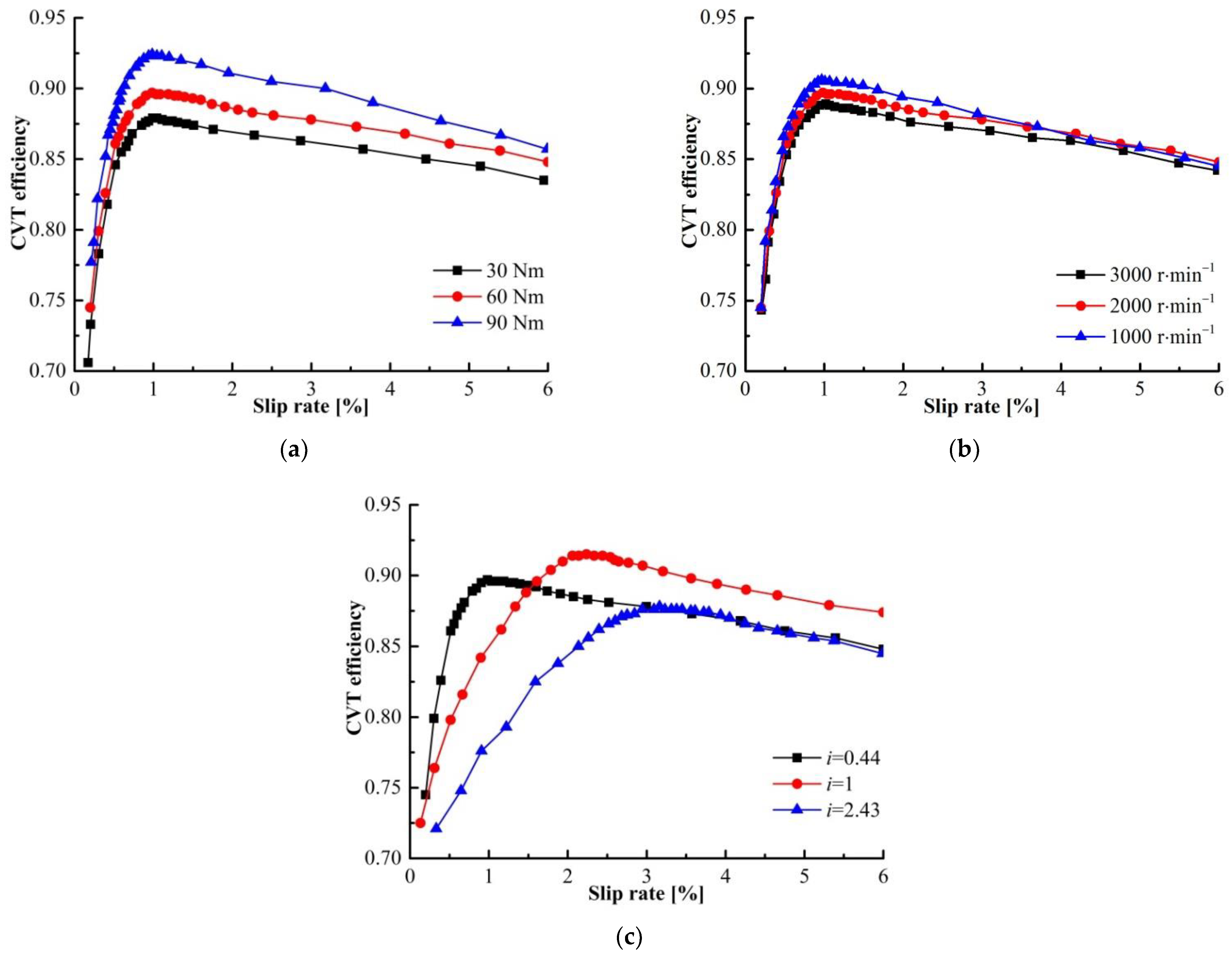
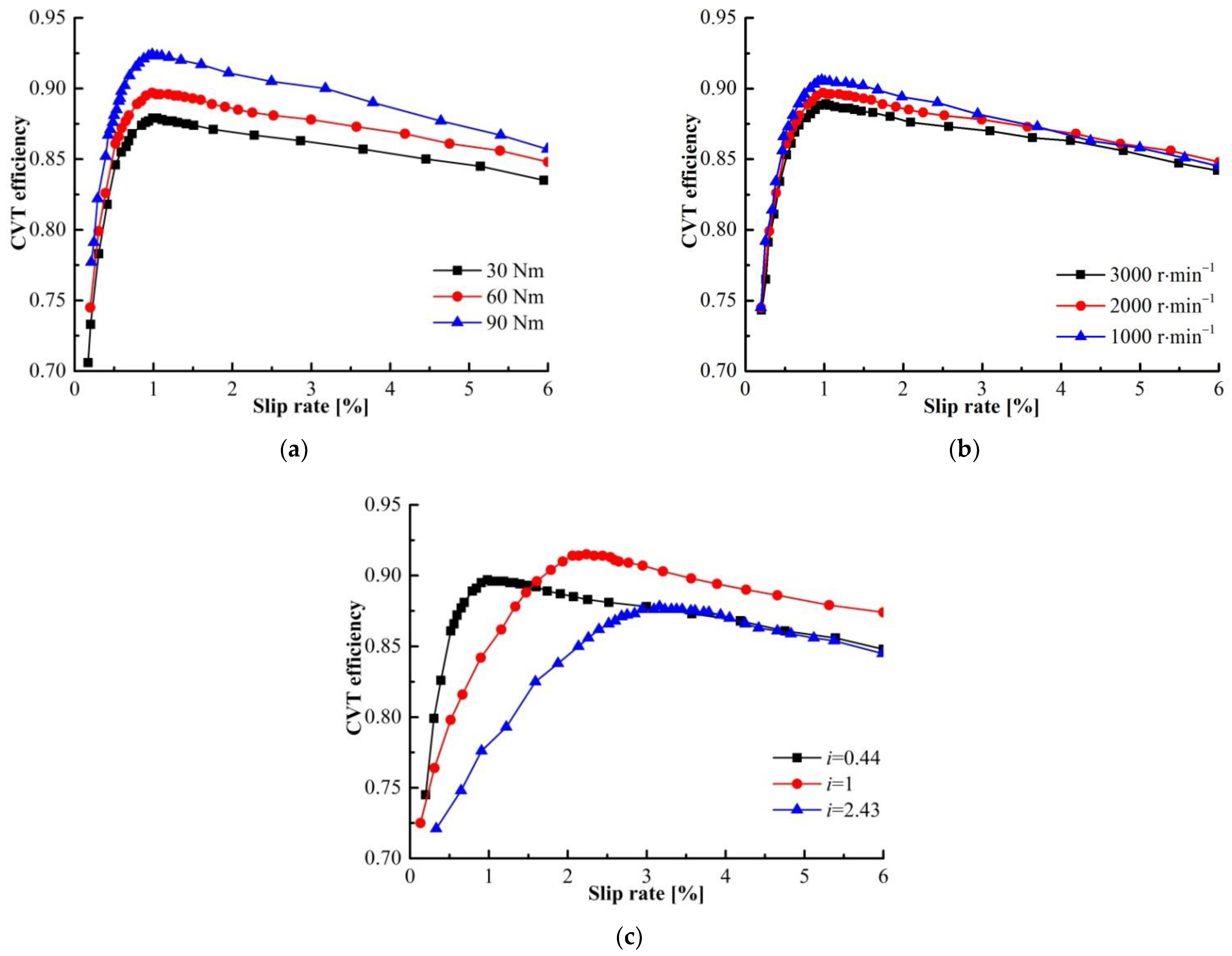
Figure 11 shows CVT slip-efficiency characteristics under different test conditions.
Figure 11a–c shows similar trends in the CVT efficiency, but the characteristics of the optimal slip rate are not completely the same. The CVT slip-characteristic is more sensitive to the speed ratio, and the slip rate corresponding to the optimal efficiency at different speed ratios is quite different. The input speed has little effect on the CVT slip-efficiency characteristics, the variation of the CVT efficiency is within 2%. It is worth noting that the slip rate under the optimal efficiency hardly changes with the input speed and torque in
Figure 11a,b. Therefore, the optimal target slip rate can be defined by the speed ratio:
8. Conclusions
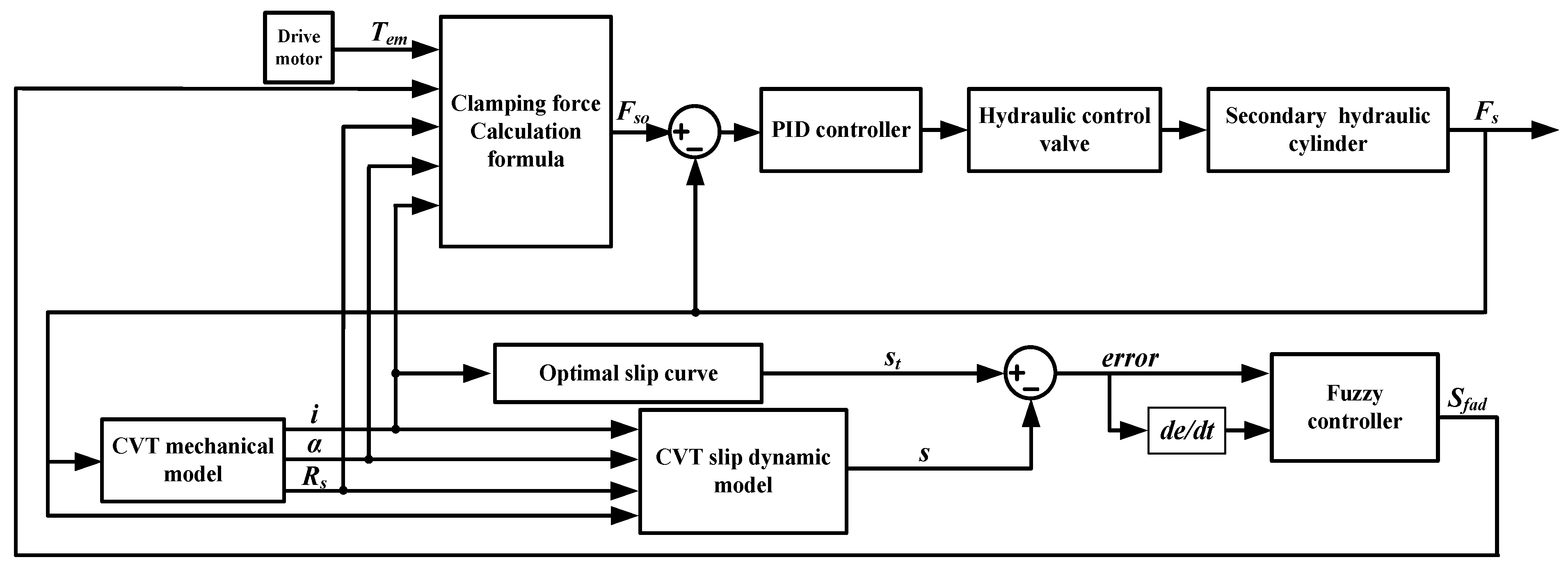
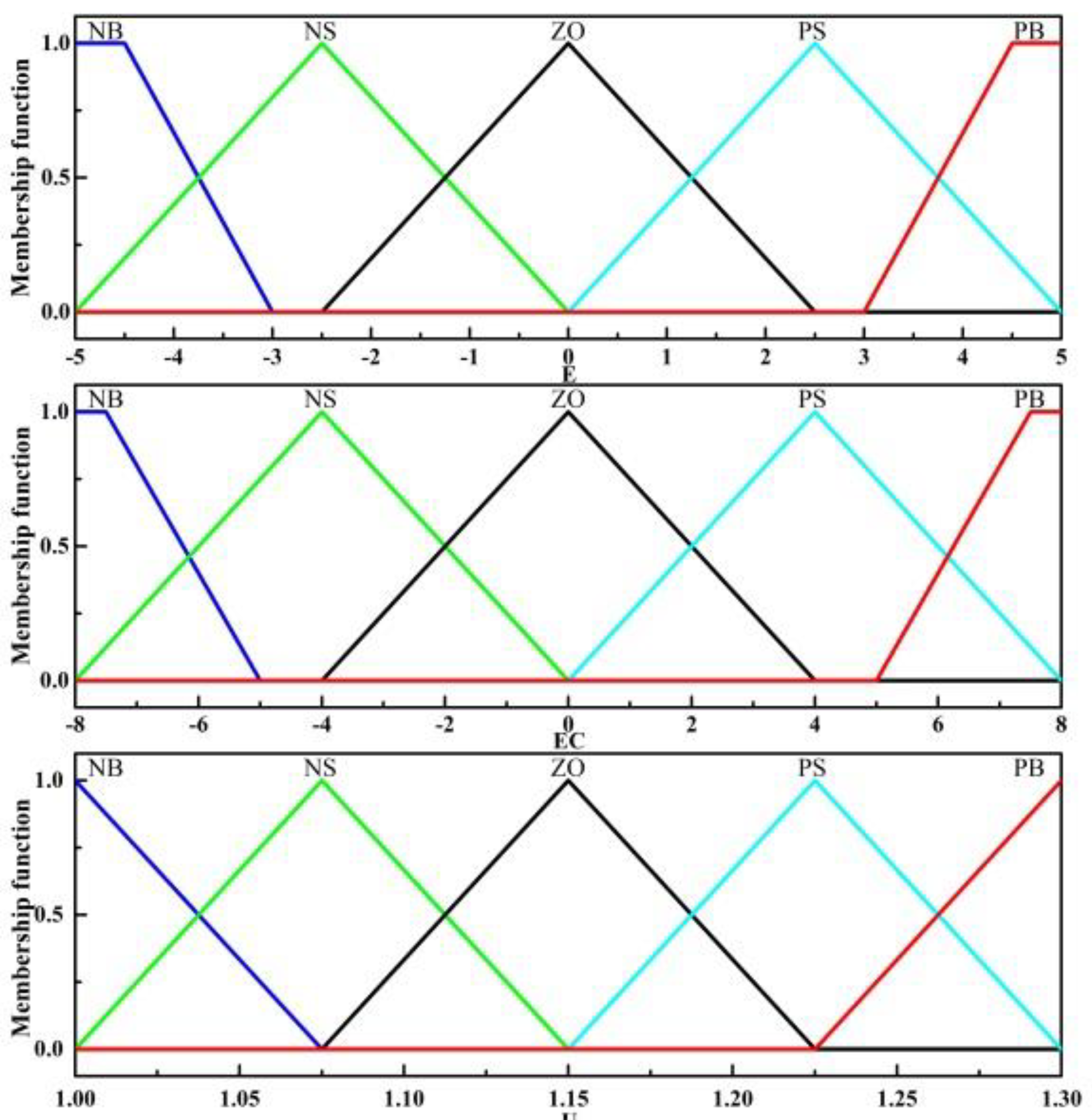
To improve the mechanical efficiency of CVT for EVs, an electric CVT configuration and a clamping force fuzzy control strategy based on slip rate are proposed. The strategy adopts dual closed-loop control. The fuzzy controller outputs dynamic safety factors to adjust the clamping force based on the slip state of the CVT. The vehicle dynamics model and the CVT slip dynamic model are established, and the proposed strategy is studied through simulation.
To design an appropriate clamping force control strategy, bench tests were carried out to get CVT slip-efficiency characteristics. The experimental results show that the CVT slip-efficiency characteristics show similar trends under different input conditions. The CVT efficiency is most sensitive to the speed ratio, the optimal slip rate is quite different under different speed ratios. The influence of input speed on slip-performance characteristics can be neglected. In addition, different input speeds or input torques hardly affect the optimal slip position.
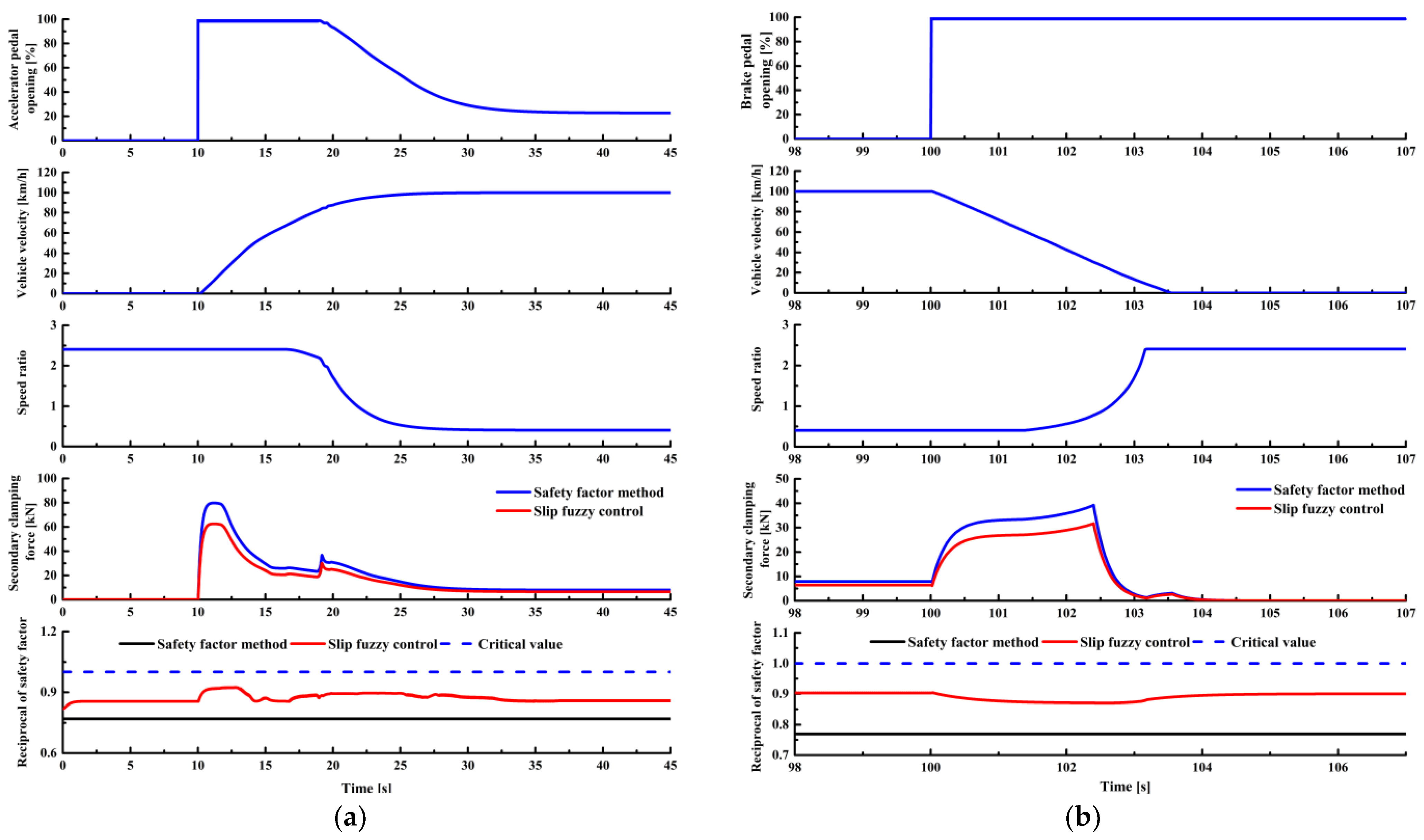
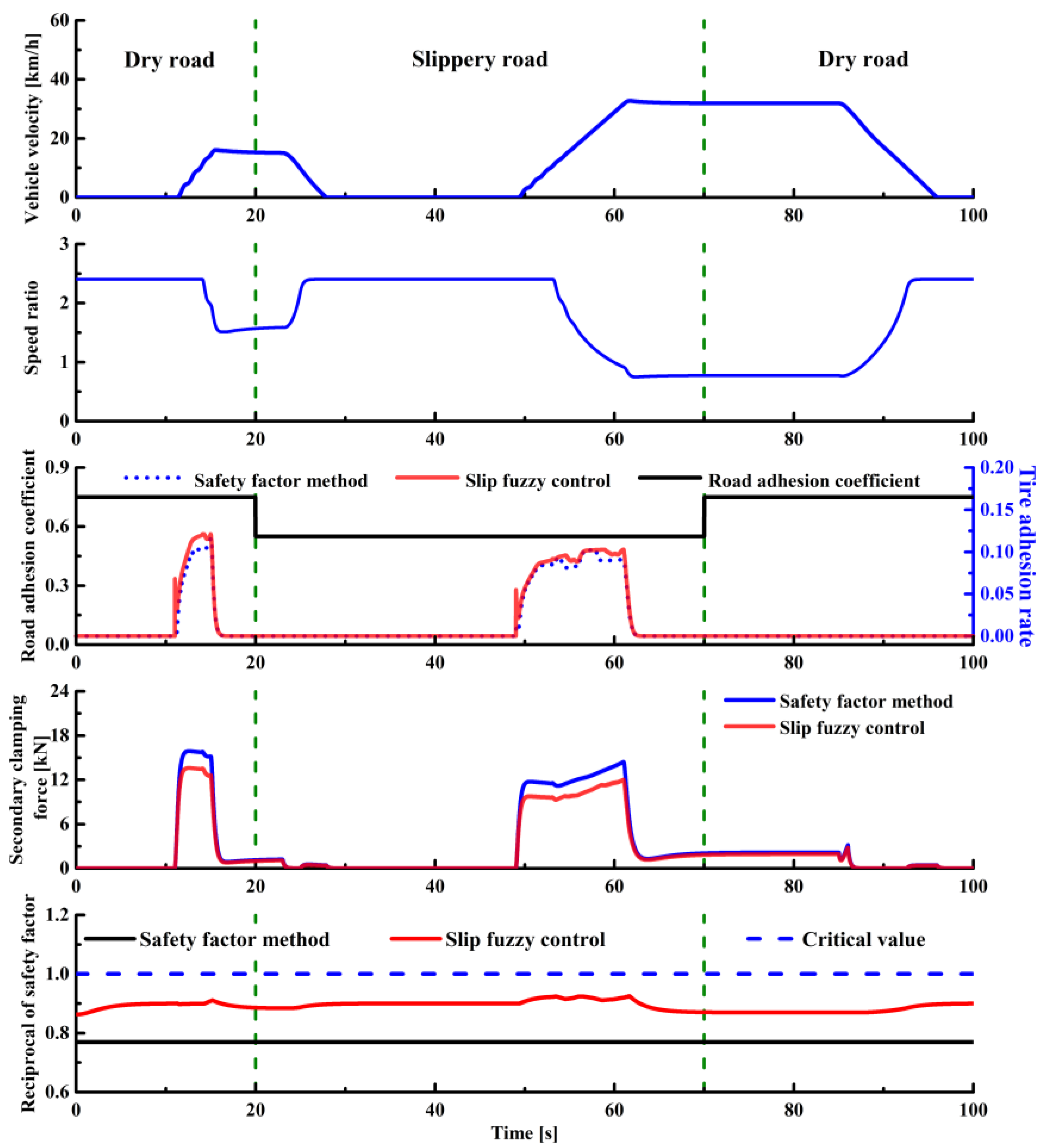
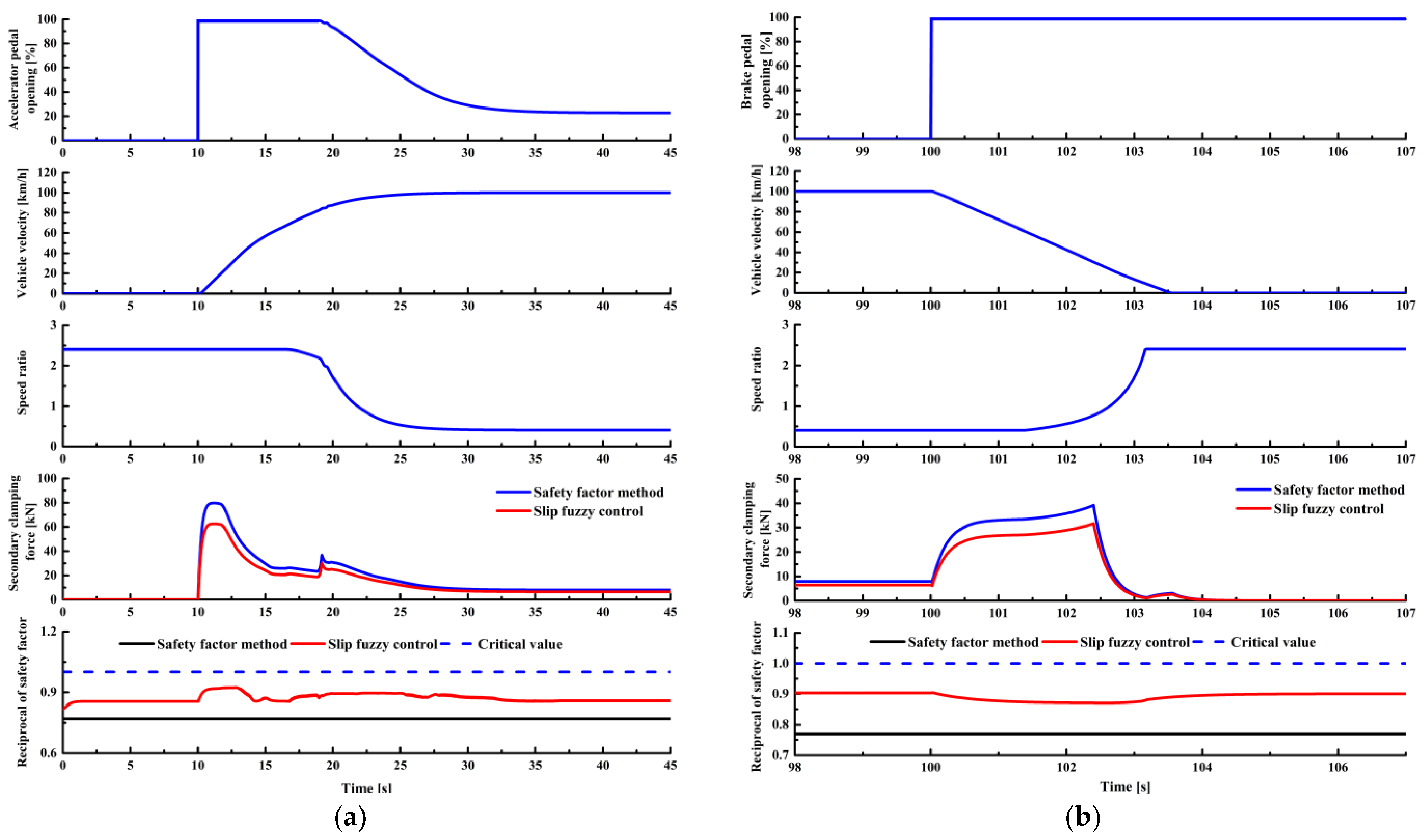
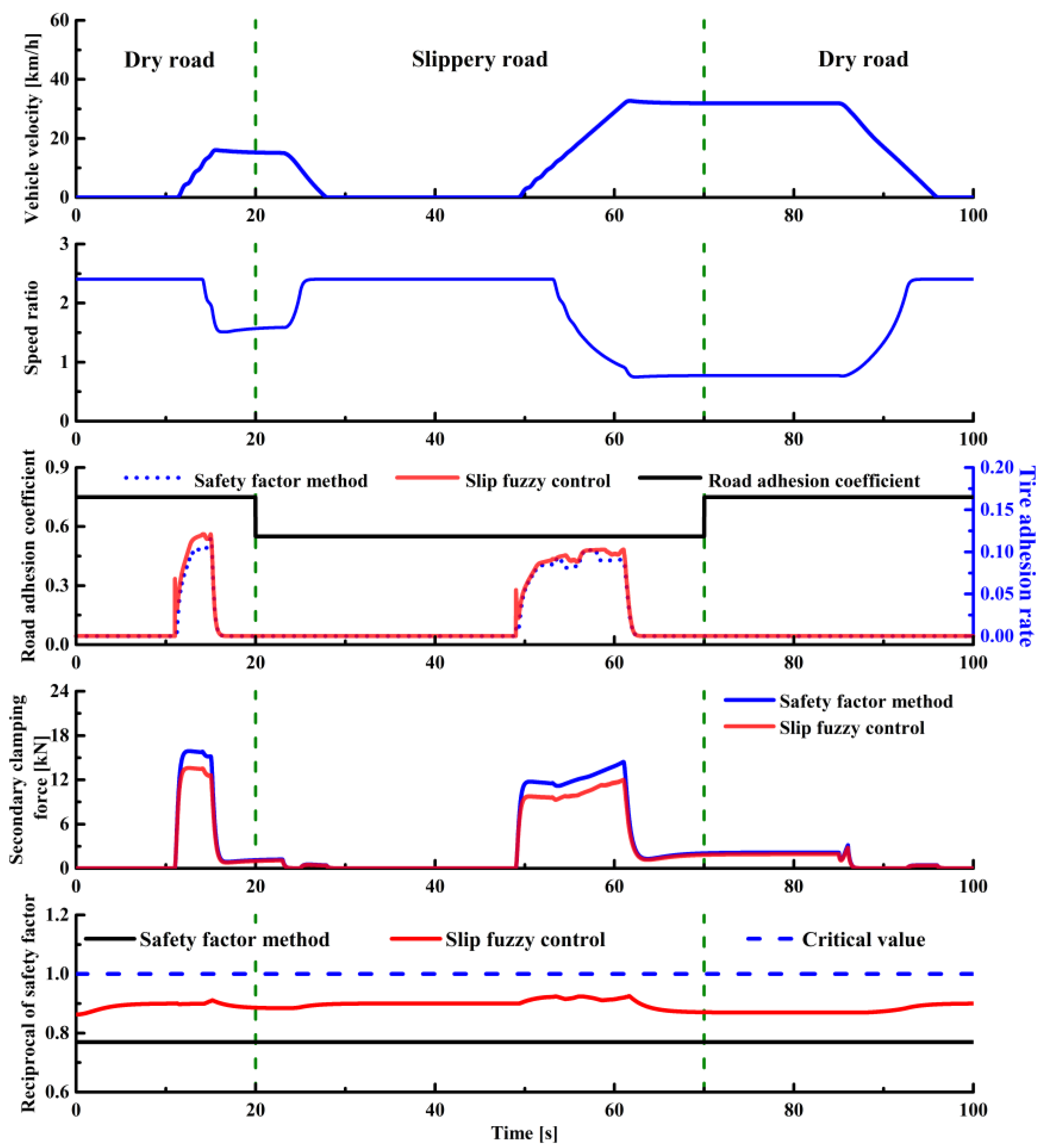
Simulations were performed under three extreme conditions: full-throttle acceleration conditions, emergency braking conditions, and road adhesion coefficient mutation conditions. The simulation results indicate that the proposed clamping force control strategy can ensure that the CVT does not occur macro slip. When the road adhesion coefficient changes suddenly, the driving wheels will not slip. Compared with the traditional clamping force control strategy, the proposed strategy can reduce the CVT clamping force by 12.86–21.65%.
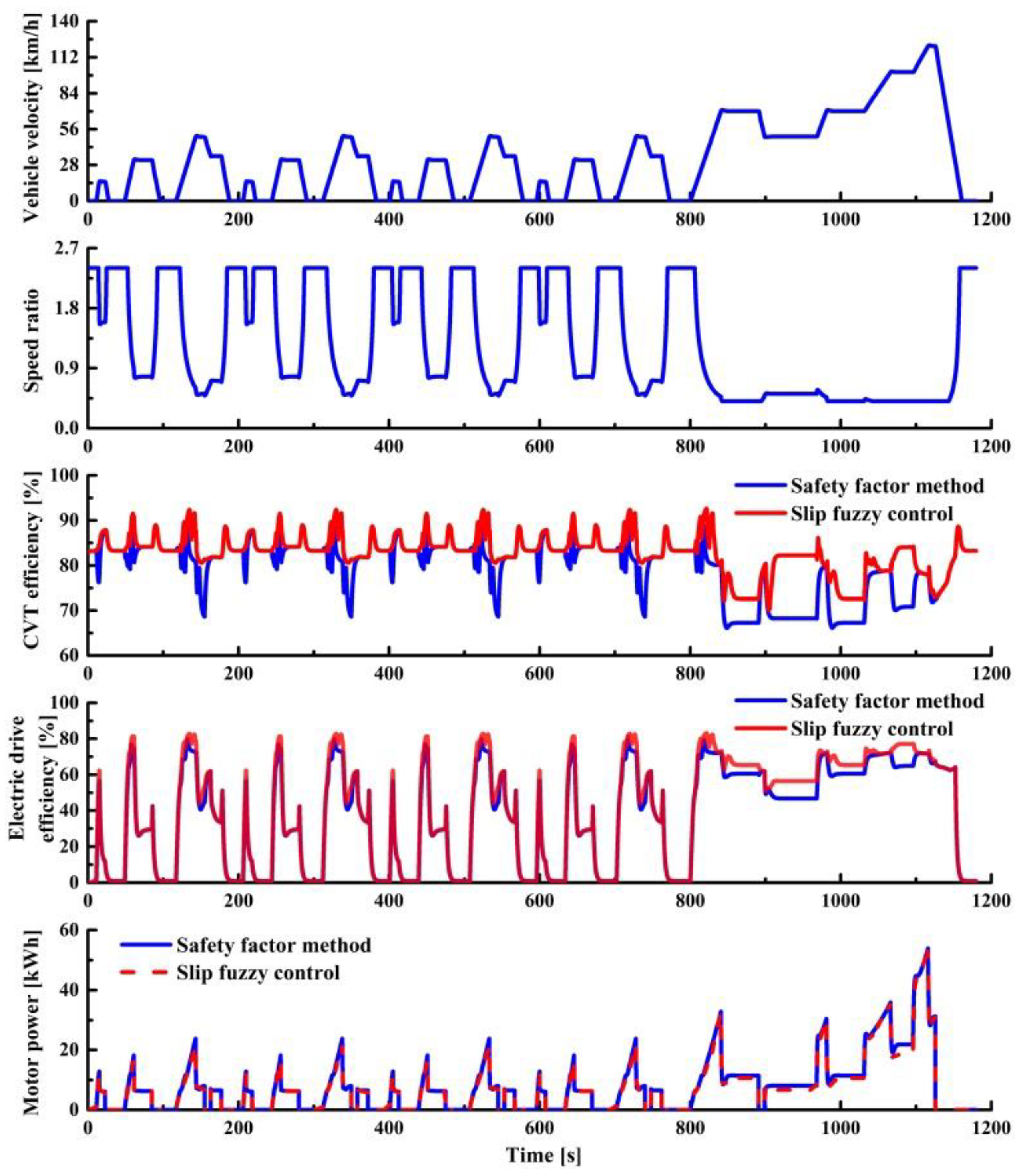
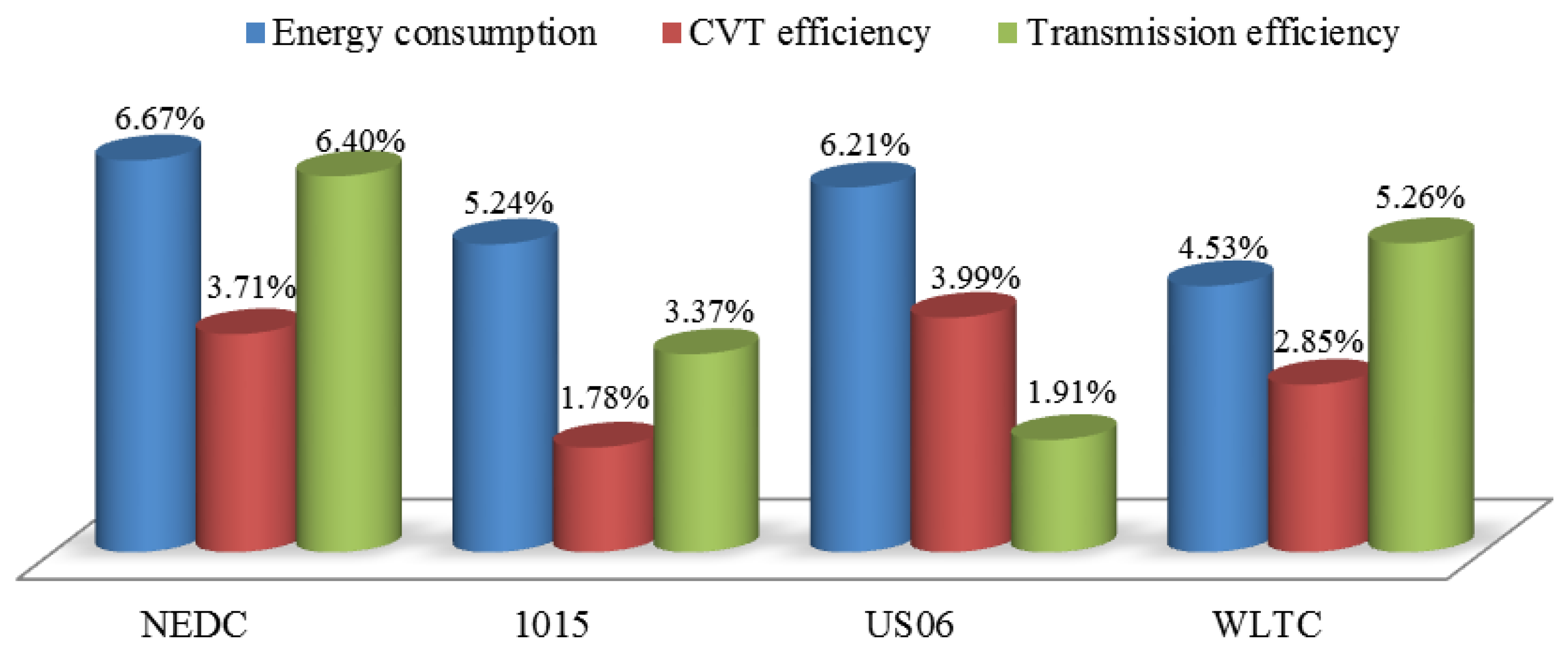
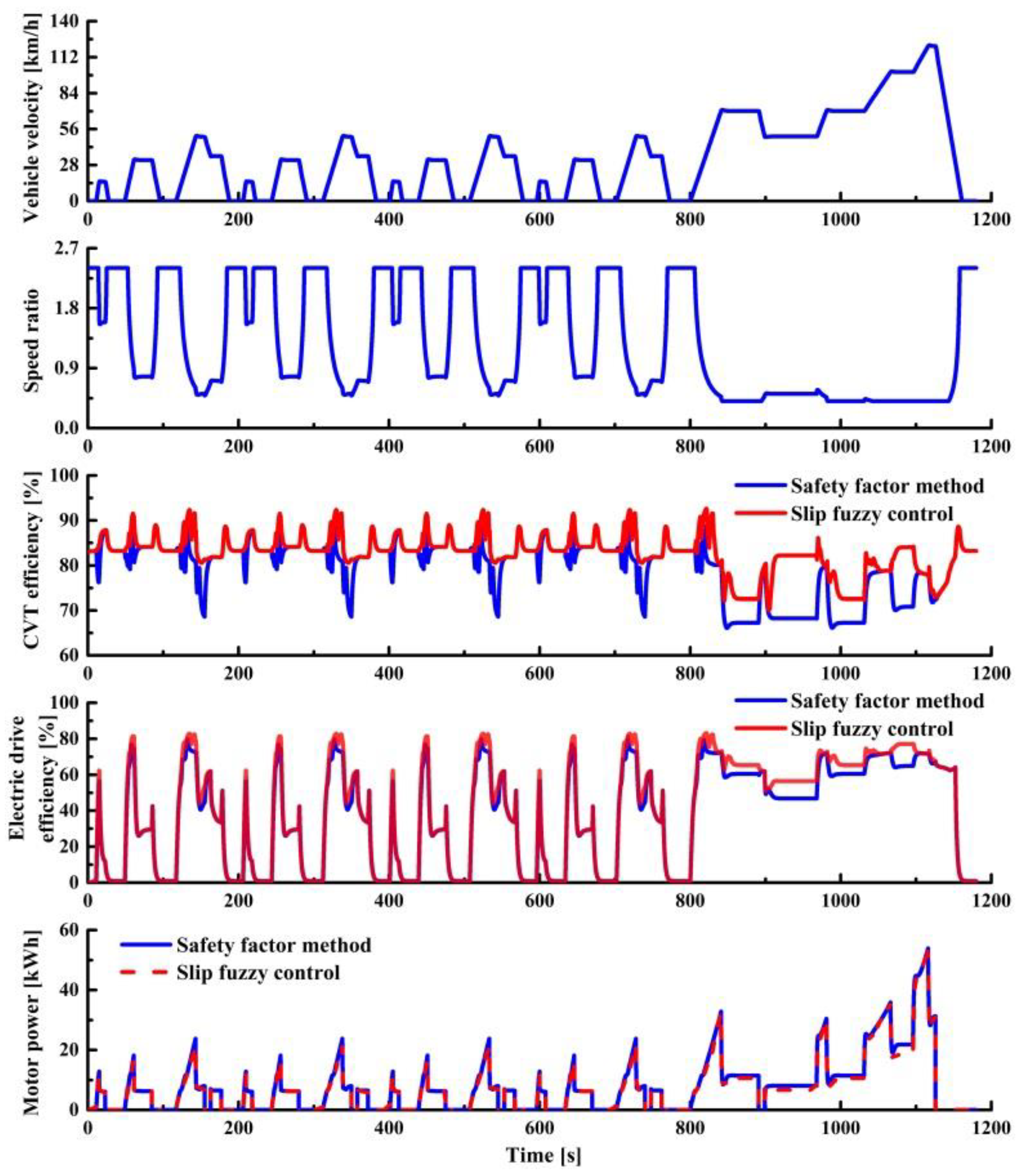
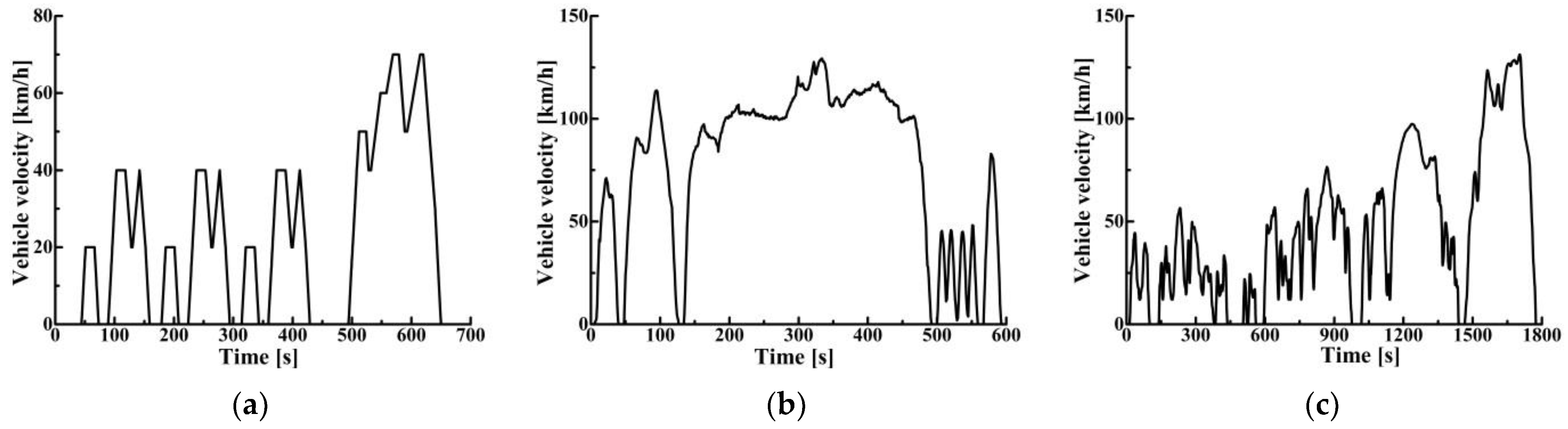
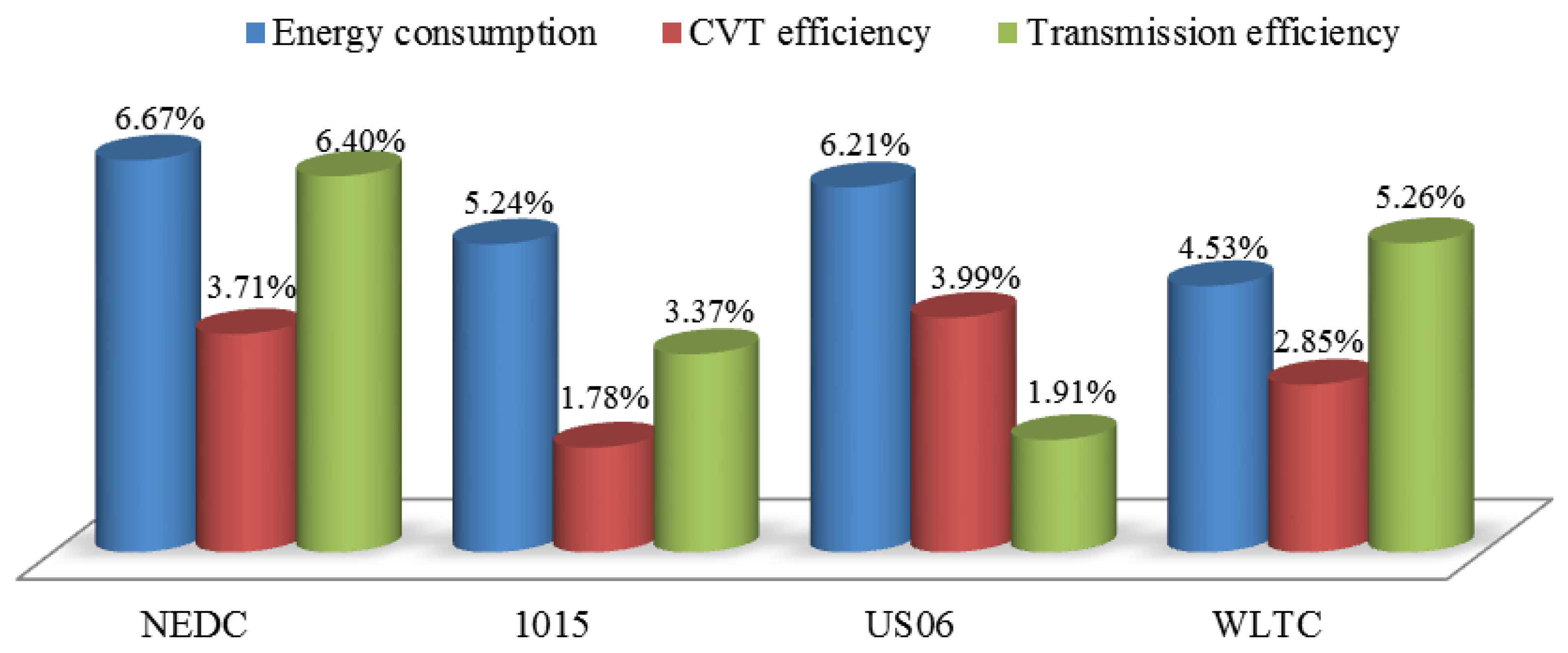
Under the NEDC driving cycle, the energy consumption with the clamping force slip distorted control strategy is 14.90 kWh, which is 6.67% lower than the traditional clamping force control strategy. At the same time, the average efficiency of CVT and average transmission efficiency increased by 3.71% and 6.40%, respectively. Vehicle energy consumption and CVT efficiency have also been improved to varying degrees in other standard driving cycles. Therefore, the proposed strategy can provide a reference for CVT clamping force research and electric vehicle energy consumption research.
Future works will focus on verifying the feasibility of the proposed clamping force control strategy through bench tests. At the same time, the electric oil pump control strategy will be developed to further improve the CVT efficiency and vehicle energy economy.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}