
Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements


Abstract
:
1. Introduction
1.1. Real-Time Kinematic (RTK)
1.2. What Is RTKLIB?
1.3. Google Smartphone Decimeter Challenge (GSDC)
1.4. Performance of RTKLIB and GSDC Participants
2. Strategies
2.1. PPK Solution
2.2. Kinematic Solution Algorithm
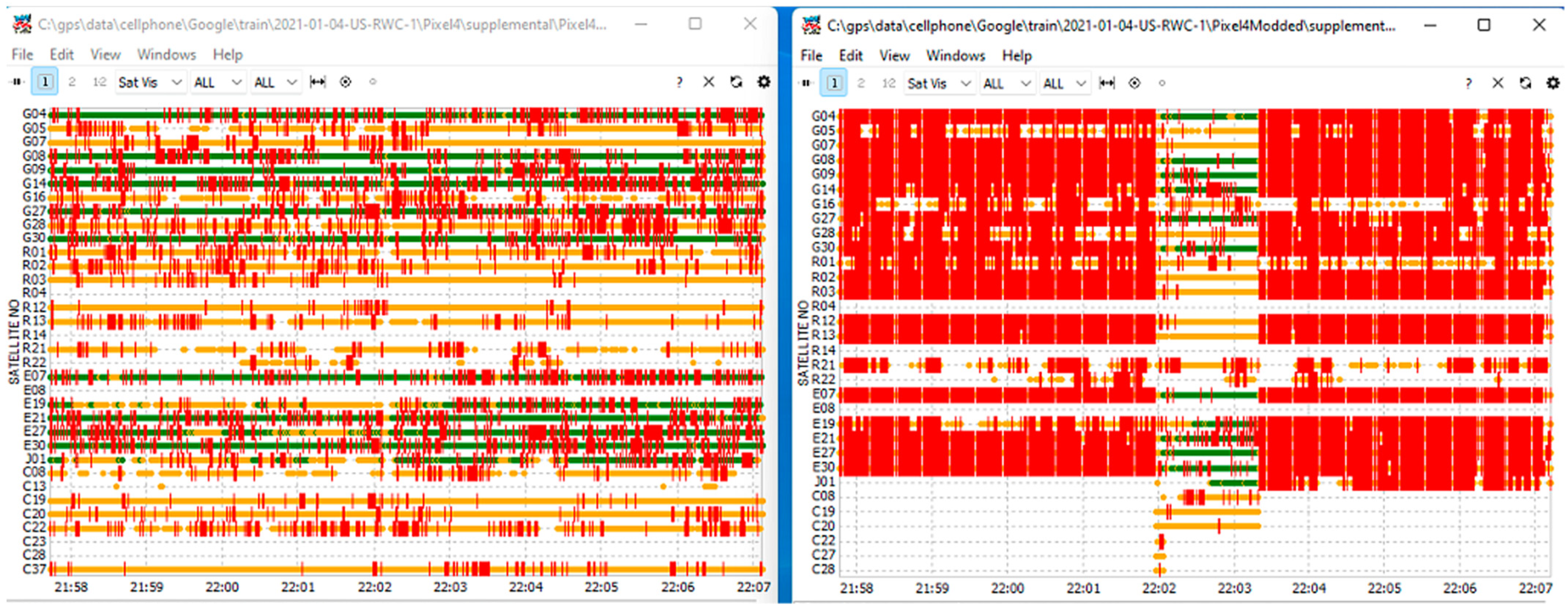
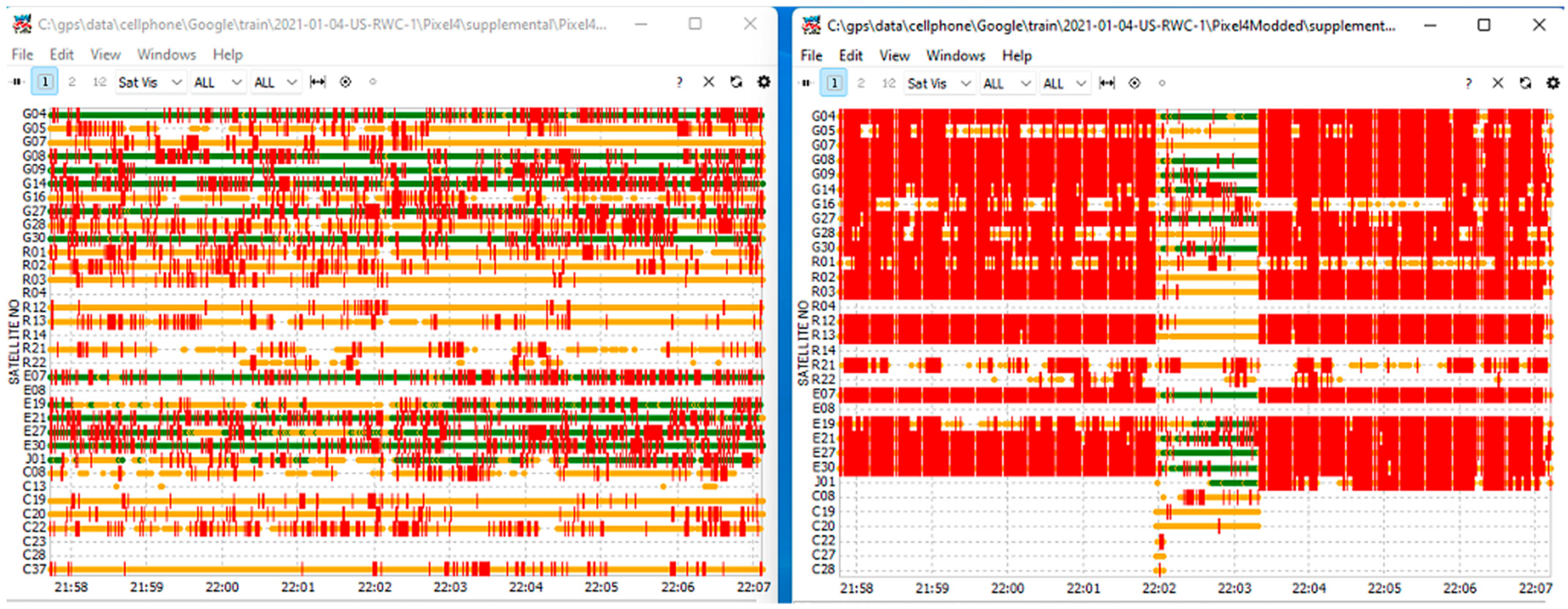
2.3. Satellite and Correction Data Selection
2.4. Data Conversion
- C/N0 was less than 20 dB-Hz;
- Received space vehicle time uncertainty was greater than 500 nanoseconds;
- Maximum pseudorange uncertainty was greater than 150 m;
- Multipath indicator was set greater than 0;
- Maximum carrier phase uncertainty was greater than 0.1 m;
- Status of the code lock was invalid;
- TOW or TOD values were not decoded and set for all constellations;
- Constellation identifier was invalid.
2.5. Code Changes to the RTKLIB Demo5
2.6. Changes to RTKLIB Settings
2.7. Data Merge
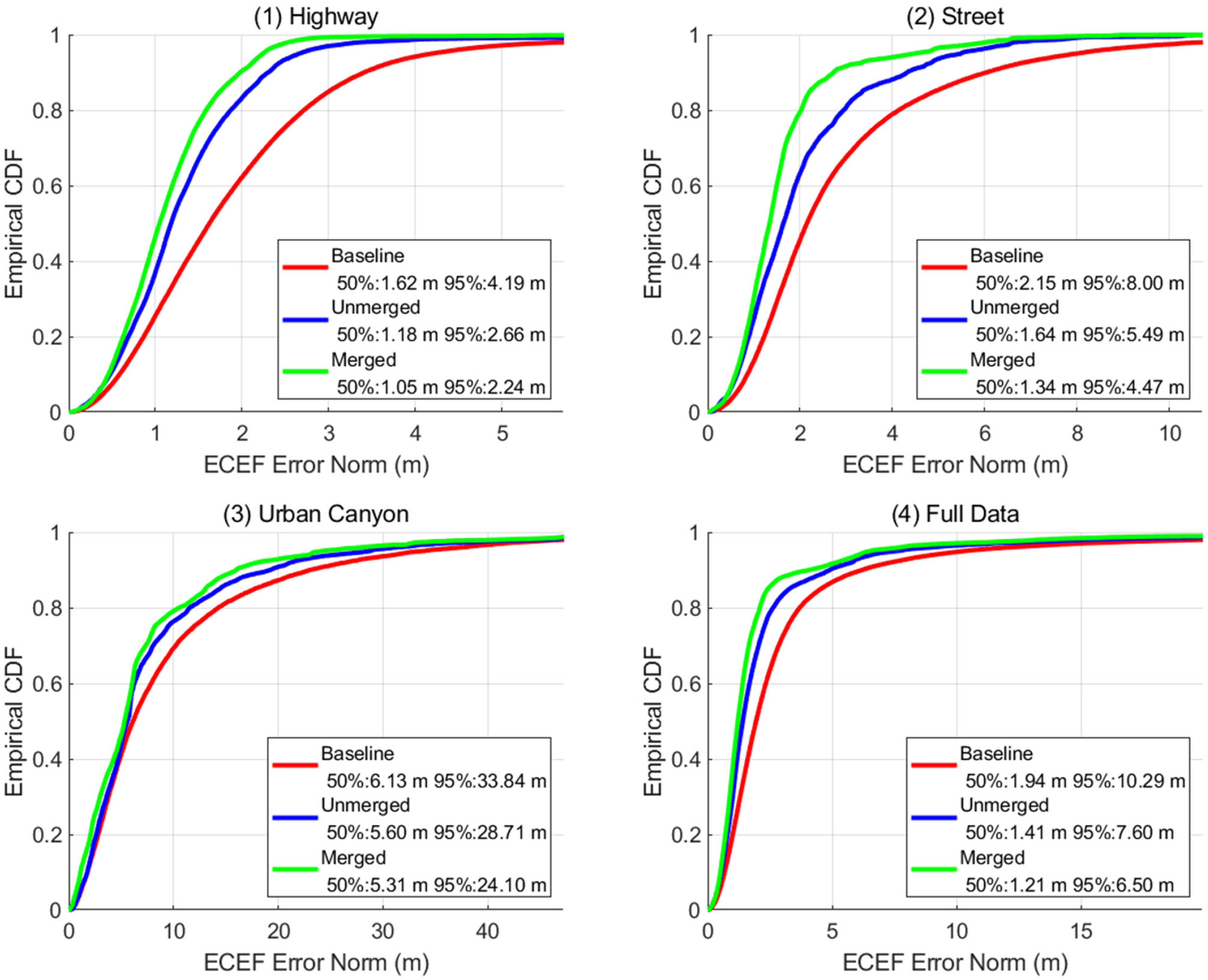
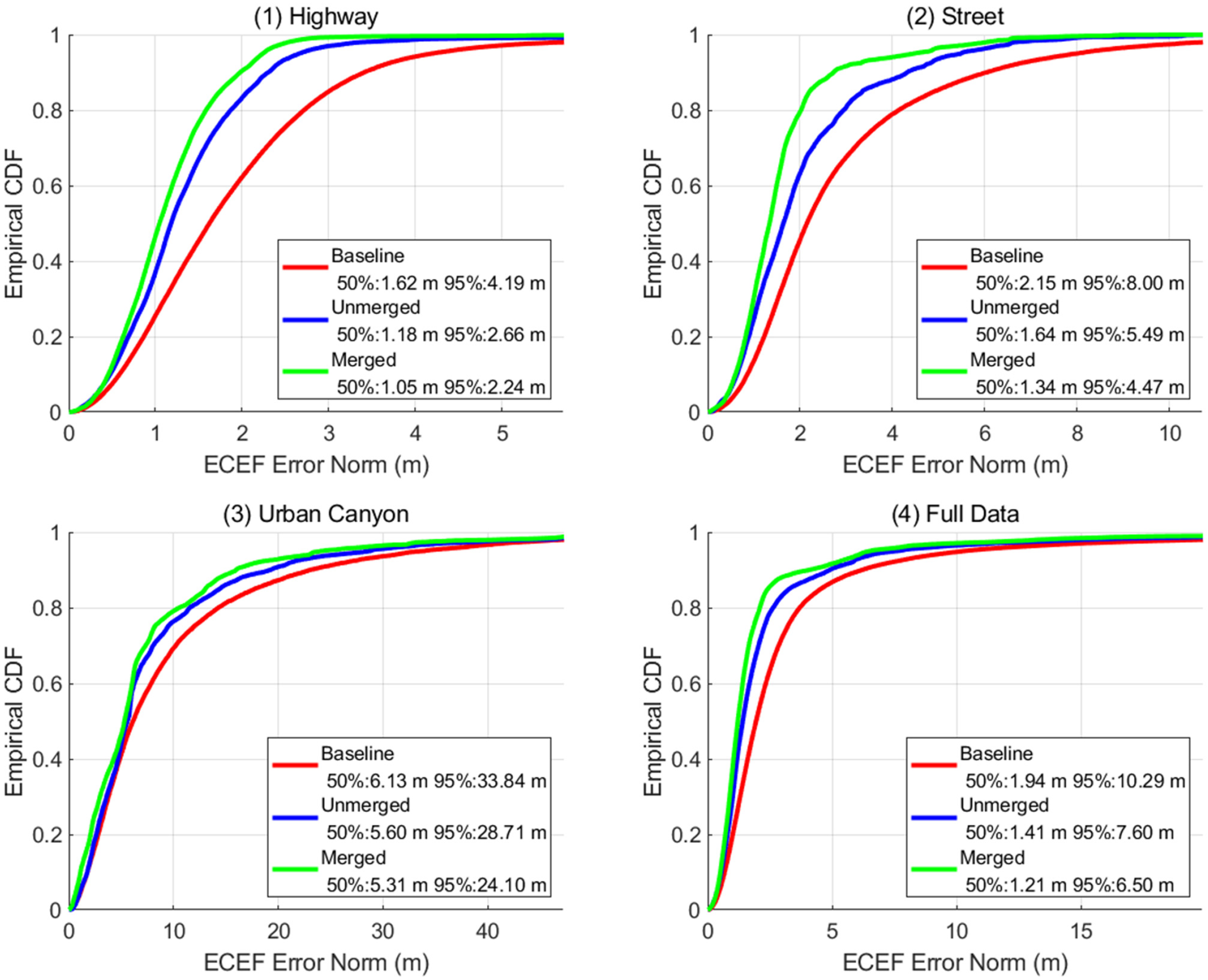
3. Results
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, J. Stochastic Modeling for Real-Time Kinematic GPS/GLONASS Positioning. Navigation 1999, 45, 297–305. [Google Scholar] [CrossRef]
- Gakstatter, E.; GPS World. RTK GNSS Receivers: A Flooded Market? 21 March 2013. Available online: https://www.gpsworld.com/rtk-gnss-receivers-a-flooded-market/ (accessed on 1 April 2022).
- Bilich, A. National Geodetic Survey, Last Modified. 14 July 2021. Available online: https://geodesy.noaa.gov/gps-toolbox/exist.htm (accessed on 1 April 2022).
- Takasu, T. RTKLIB: Open Source Program Package for RTK-GPS. In Proceedings of the FOSS4G 2009, Tokyo, Japan, 20–23 October 2009. [Google Scholar]
- IGS/RTCM RINEX Working Group. The Receiver Independent Exchange Format, Version 4.00. 1 December 2021. Available online: https://files.igs.org/pub/data/format/rinex_4.00.pdf (accessed on 1 April 2022).
- RTCM Standard 10403.3; Differential Global Navigation Satellite Systems Services, Version 3. RTCM Special Committee: Washington, DC, USA, 20 May 2021. Available online: https://www.rtcm.org (accessed on 1 April 2022).
- European Global Navigation Satellite Systems Agency. PPP-RTK Market and Technology Report. 2019. Available online: https://www.euspa.europa.eu/sites/default/files/calls_for_proposals/rd.03_-_ppp-rtk_market_and_technology_report.pdf (accessed on 1 April 2022).
- Fu, G.; Khider, M.; van Diggelen, F. Android raw GNSS Measurement Datasets for Precise Positioning. In Proceedings of the ION GNSS+ 2020, St. Louis, MI, USA, 22–25 September 2020. [Google Scholar]
- Google Smartphone Decimeter Challenge. Available online: https://www.kaggle.com/c/google-smartphone-decimeter-challenge (accessed on 1 April 2022).
- NovAtel. IMU-ISA-100C Product Sheet, Version 8, Updated 10 May 2016. Available online: https://hexagondownloads.blob.core.windows.net/public/Novatel/assets/Documents/Papers/IMUISA100CD19539v2/IMU-ISA-100C%20Product%20Sheet.pdf (accessed on 1 April 2022).
- Taro, S. First Place Award Winner of the Smartphone Decimeter Challenge: Global Optimization of Position and Velocity by Factor Graph Optimization. In Proceedings of the ION GNSS+ 2021, Denver, CO, USA, 19–23 September 2021. [Google Scholar]
- Sohier, D. Methodology behind the Baseline Location Estimates, Kaggle. Available online: https://www.kaggle.com/competitions/google-smartphone-decimeter-challenge/discussion/238583 (accessed on 28 March 2022).
- Tomoji, T. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In International Symposium on GPS/GNSS; International Convention Center: Jeju, Korea, 2009. [Google Scholar]
- Pesyna, K.M., Jr.; Heath, R.W., Jr.; Humphreys, T.E. Centimeter Positioning with a Smartphone-Quality GNSS Antenna. In Proceedings of the ION GNSS+ 2014, Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise Point Positioning Dual-Frequency GNSS Observations on Smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Han, K.; Lee, S.; Song, Y.J.; Lee, H.B.; Park, D.H.; Won, J.H. Precise Positioning with Machine Learning based Kalman Filter using GNSS/IMU Measurements from Android Smartphone. In Proceedings of the ION GNSS+2021, Denver, CO, USA, 19–23 September 2021. [Google Scholar]
- Fortunato, M.; Tagliaferro, G.; Fernandez-Rodriguez, E.; Critchley-Marrows, J. The Whole Works: A GNSS/IMU Tightly Coupled Filter for Android Raw GNSS Measurements with Local Ground Augmentation Strategies. In Proceedings of the ION GNSS+ 2021, Denver, CO, USA, 19–23 September 2021. [Google Scholar]
- Everett, T. RTKLIB Manual: Demo5 Version. 21 December 2021. Available online: https://rtkexplorer.com/pdfs/manual_demo5.pdf (accessed on 1 April 2022).
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, Prospects and Challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Rokubun. Android GNSS Logger to RINEX Converter. 24 June 2020. Available online: https://github.com/rokubun/android_rinex/ (accessed on 1 April 2022).
- RTKLIB: Demo5. Available online: https://github.com/rtklibexplorer/RTKLIB/ (accessed on 26 March 2022).
- Everett, T.; Rtklibexplorer. Google Smartphone Decimeter Challenge. 10 January 2022. Available online: https://rtklibexplorer.wordpress.com/2022/01/10/google-smartphone-decimeter-challenge/ (accessed on 1 April 2022).
- Everett, T.; Rtklibexplorer. Another Look at L1/L5 Cellphone PPK with RTKlib and an Xiaomi Mi8 Phone. 27 February 2021. Available online: https://rtklibexplorer.wordpress.com/2021/02/27/another-look-at-l1-l5-cellphone-ppk-with-rtklib/ (accessed on 1 April 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Positioning mode: static -> kinematic |
| GNSS constellations: disable BeiDou |
| Enable L5/E5 frequency: L1 + L2/E5b -> L1 + L2/E5b + L5/E5a |
| Filter Type: Combined -> Combined—no phase reset |
| SNR Mask L1/L5 (dB-Hz): 35/0 -> 24/24 |
| Integer Ambiguity Res: on -> off |
| Cycle Slip Threshold: Geometry-Free: 0.05 -> 0.10 |
| Cycle Slip Threshold: Doppler: N/A -> 5.0 |
| Innov (m): 2 -> 1 |
| Time Format: hms -> tow |
| Phase Error Ratio L5: 300 ->100 |
| Carrier Phase Bias: 0.0001 -> 0.01 cycles |
| Scenario–Device | Total Epochs | Total Discontinuities |
|---|---|---|
| 2020-05-14-US-MTV-2_Pixel4XLModded | 129 | 33 |
| 2020-09-04-US-SF-1_Pixel4 | 258 | 253 |
| 2021-01-04-US-RWC-1_Pixel4Modded | 263 | 222 |
| 2021-01-04-US-RWC-1_Pixel4XL | 272 | 272 |
| 2021-01-04-US-RWC-2_Pixel4Modded | 262 | 262 |
| 2021-01-04-US-RWC-2_Pixel4XL | 266 | 266 |
| 2021-01-05-US-SVL-1_Pixel4XL | 263 | 222 |
| 2021-01-05-US-SVL-1_Pixel5 | 269 | 268 |
| 2021-01-05-US-SVL-2_Pixel4XL | 257 | 197 |
| 2021-03-10-US-SVL-1_Pixel4XL | 242 | 242 |
| 2021-04-29-US-MTV-1_Pixel4 | 235 | 121 |
| 2021-04-29-US-MTV-1_Pixel5 | 261 | 249 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Everett, T.; Taylor, T.; Lee, D.-K.; Akos, D.M. Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements. Sensors 2022, 22, 3825. https://doi.org/10.3390/s22103825
Everett T, Taylor T, Lee D-K, Akos DM. Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements. Sensors. 2022; 22(10):3825. https://doi.org/10.3390/s22103825
Chicago/Turabian StyleEverett, Tim, Trey Taylor, Dong-Kyeong Lee, and Dennis M. Akos. 2022. "Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements" Sensors 22, no. 10: 3825. https://doi.org/10.3390/s22103825
APA StyleEverett, T., Taylor, T., Lee, D.-K., & Akos, D. M. (2022). Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements. Sensors, 22(10), 3825. https://doi.org/10.3390/s22103825