1. Introduction
The birth of radar in the first half of the last century led to numerous research studies and advances in the field. Although radar systems were originally developed for military surveillance tasks, modern radars have found many applications in our daily lives due to their continuous development over the decades. Conventionally, radar systems were limited to official or governmental entities, but now their smaller form factor, lower cost, higher precision, and easier handling have led to more general utilization. Conventional applications of radars have been aerial [
1] and terrestrial [
2] traffic control, missile and aerial defense [
3], altimetry [
4], naval surveillance [
5], weather surveillance [
6], and astronomy [
7], whereas the contemporary radar systems have also been employed in modern medicine [
8], autonomous vehicles [
9,
10,
11], geology [
12], building security, human activity recognition systems [
13,
14,
15,
16], and even in consumer electronics such as mobile phones [
17] (serving as a gesture recognition system). It is now safe to assert that the idea of radar sensors being ubiquitous is not far-fetched anymore due to their miniaturization, affordability, and utility. For a non-trivial problem such as autonomous driving in automotive engineering, several types of radar systems (short-range, medium-range, and long-range) [
18] are typically integrated to achieve the desired performance, especially under adverse lighting conditions, where other sensing modalities do not perform as required.
A radar system transmits electromagnetic waves and processes the received backscattered waves to estimate one or more parameters of an object present in the environment. Depending on the type of radar, it may measure the range, Doppler (or micro-Doppler) signature, and angular information of a target within certain limitations. Depending on the problem, a radar may be designed and deployed as a continuous wave (CW) radar [
19], frequency-modulated continuous wave (FMCW) radar [
20], pulsed radar [
21], bistatic radar, monopulse radar [
22,
23], synthetic aperture radar (SAR) [
24], digital beamforming (DBF) multiple-input multiple-output (MIMO) radar in a monostatic configuration [
25,
26], or distributed MIMO radar [
27,
28,
29]. Recently, short- to medium-range FMCW radars have been gaining increasing attention for commercial indoor and outdoor applications. For instance, the authors of [
30,
31] have used a K-band FMCW radar system in indoor settings to monitor human vital functions. More recently, FMCW radar systems operating in the W-band have been adopted for more sophisticated applications, such as sign language recognition [
32], multimodal traffic monitoring [
33], and skeletal posture estimation [
34].
Generally, radar systems suppress the static clutter by filtering out the zero-Doppler frequency components from the received signal, which prevents detection and tracking of the scatterer’s motion perpendicular to its boresight. Thus, to acquire the scatterer’s motion information from multiple aspect angles, the deployment of a single-input single-output (SISO) radar or a monostatic MIMO radar is not a suitable choice. Instead, with the idea of macrodiversity, a distributed MIMO radar system or a multistatic radar network is preferred to circumvent the shortcomings of the aforementioned radar configurations. It is in this context that we will focus our attention on the deployment of a distributed MIMO radar system in indoor environments. For different application areas, researchers are investigating different target–antenna configurations while leaning towards multistatic radar networks. For example, the authors of [
35] deployed a network known as NetRAD for the detection of armed/unarmed personnel, and the authors of [
36] report the use of a commercial DWM1000 ultra wideband wireless transceiver module in a multistatic configuration to track a moving person in a cluttered indoor or outdoor environment.
The probability of mutual interference between radar systems is increasing gradually as commercial radars become more widely used. In distributed MIMO radar systems, cross-channel interference exists between the different nodes of a multistatic radar network. For this research, we chose a radar system that uses the time division multiple access (TDMA) scheme to avoid cross-channel interference. In the TDMA mode, the transmitters of a MIMO radar system operate in different time slots. As part of the physical channel characteristics, it is also imperative for the system performance to consider the interchannel radio frequency (RF) isolation inside the RF circuitry. In case of RF leakage in MIMO radar subchannels, the received signals are of the same order of magnitude for all receiver channels. For a consumer grade hardware that undergoes such RF leakage, the signal from one receiver leaks into the other receiver, and vice versa, making it impossible to separate the subchannels from each other. The problem is then to distinguish the received signal once impaired by RF-leakage from the co-channel signals. The interference problems arising due to the RF leakage between the RF chains cannot be resolved by the TDMA scheme, because the TDMA scheme is only effective against cross-channel interference if good RF-isolation is ensured beforehand. Thus, for such consumer grade MIMO radar systems, we propose a robust approach in this paper to solve the interference problem.
To estimate the trajectories of a non-stationary scatterer from different aspect angles in a cluttered indoor environment, we adopt Ancortek’s commercial MIMO radar system SDR-KIT 2400T2R4, which operates in the 24–26 GHz frequency band. It has in aggregate six independent physical RF chains: two transmitter chains and four receiver chains. For this research, we utilize Ancortek’s
MIMO radar system in a
configuration for simplicity. Ancortek’s radar system is currently the only commercially available MIMO radar system that offers the flexibility to distribute its antennas and to process all eight MIMO subchannel links individually. We distribute two pairs of collocated transmitter–receiver antennas in an indoor setting to illuminate a non-stationary scatterer from different aspect angles. The problem of cross-channel interference arises in Ancortek’s MIMO radar system even with the utilization of the TDMA scheme. Furthermore, we will point out that Ancortek’s SDR-KIT 2400T2R4 has a very poor interchannel RF isolation, which leads to incorrect measurements of the mean Doppler shift. Thus, without any hardware or firmware alteration, there is no known optimal solution to effectively isolate the different RF MIMO channel links. The problem of interference in the Ancortek radar has also been reported by the authors of [
37], where they have subtracted the spectrograms to alleviate the interference problem. The solution proposed in [
37] is suboptimal and non-robust; it works when the interference component is smaller than the subchannel’s main component and fails when the interference component is of the order of the magnitude of the main component of the subchannel. Therefore, in this paper, we propose an optimal and robust solution that completely eradicates the problem of cross-channel interference. The proposed solution performs effectively even when the interference component is stronger than the subchannel’s main component. Although our focus is on Ancortek’s radar, similar interference problems may also persist for future commercially available MIMO radar sensors. Thus, for such MIMO radar systems, the proposed solution can be adopted without entailing any hardware or firmware modifications. Additionally, the proposed solution also helps alleviate the maximum measurable velocity or the pulse repetition frequency (PRF) of the radar by completely avoiding the TDMA scheme, and still being able to segregate the MIMO channel links.
The principal contributions of this paper are as follows:
For a MIMO radar system whose antennas are distributed in an indoor cluttered environment, we present a system-theoretical approach to simulate the time-varying (TV) trajectories of a scatterer with arbitrary antenna placements.
We illuminate a non-stationary scatterer from different aspect angles (by deploying two pairs of collocated transmitter-receiver antennas) to analyze the TV micro-Doppler spectrogram, TV radial velocity profile, and TV mean Doppler shift.
For Ancortek’s SDR-KIT 2400T2R4 distributed MIMO radar system, we highlight the problem of cross-channel interference. We propose an optimal and robust solution to completely eradicate the interference components without modifying the hardware or firmware of the MIMO radar system.
We conduct experiments to verify the effectiveness of the proposed solution by successfully segregating the measured MIMO subchannels’ data.
We cross-validate the analytical model and the proposed solution of the interference problem by comparing the simulation results with the measurement results.
The organization of the paper is as follows.
Section 2 formulates the interference problems that persist in Ancortek’s SDR-KIT 2400T2R4 distributed MIMO radar system. The geometrical 3D indoor channel model and the radar system model are presented in
Section 3 and
Section 4, respectively.
Section 5 elucidates the proposed solution to the interference problem. The simulation results and the measurement results are discussed in
Section 6. Finally,
Section 7 summarizes our results and draws the conclusions.
2. Problem Description
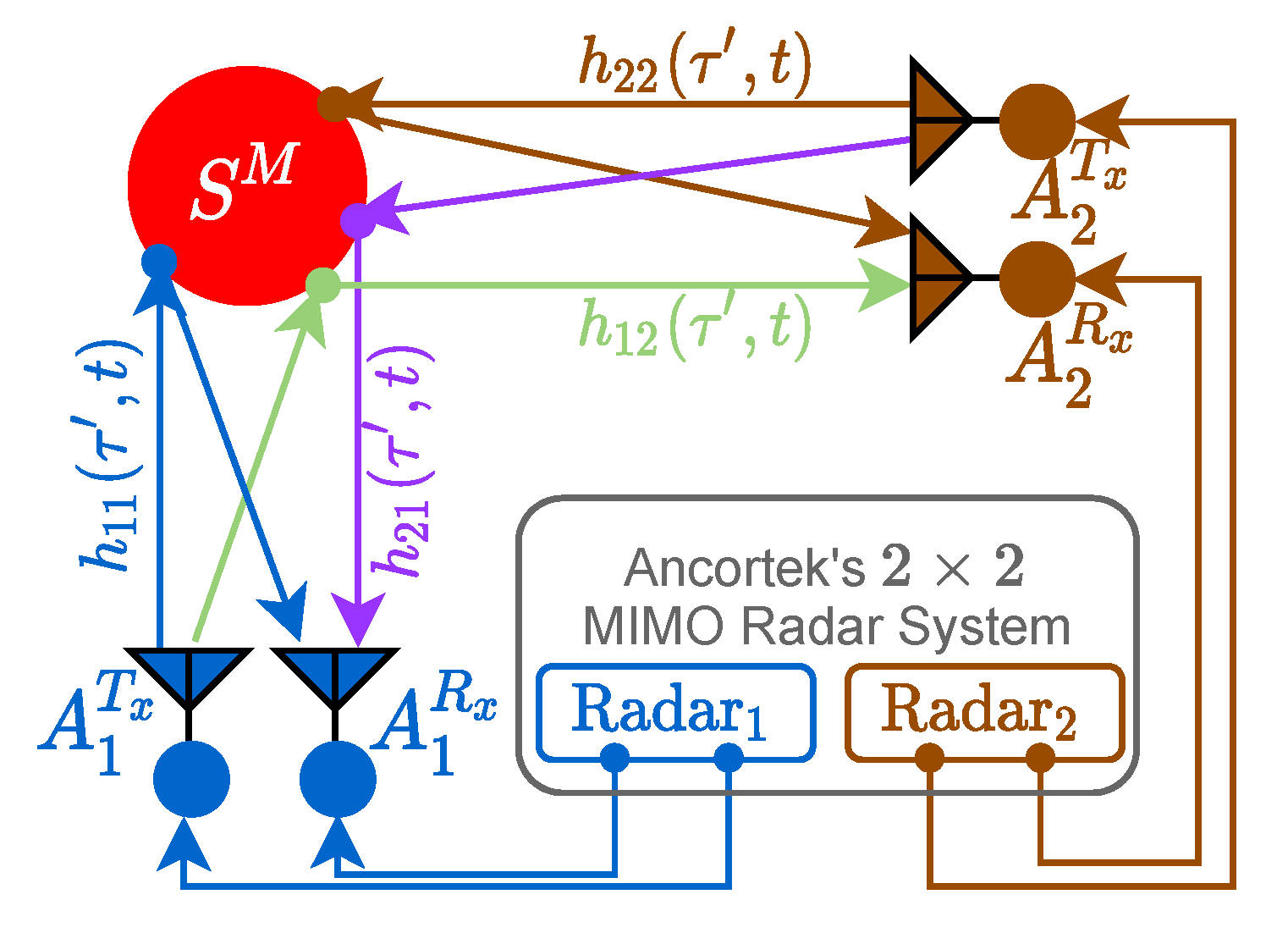
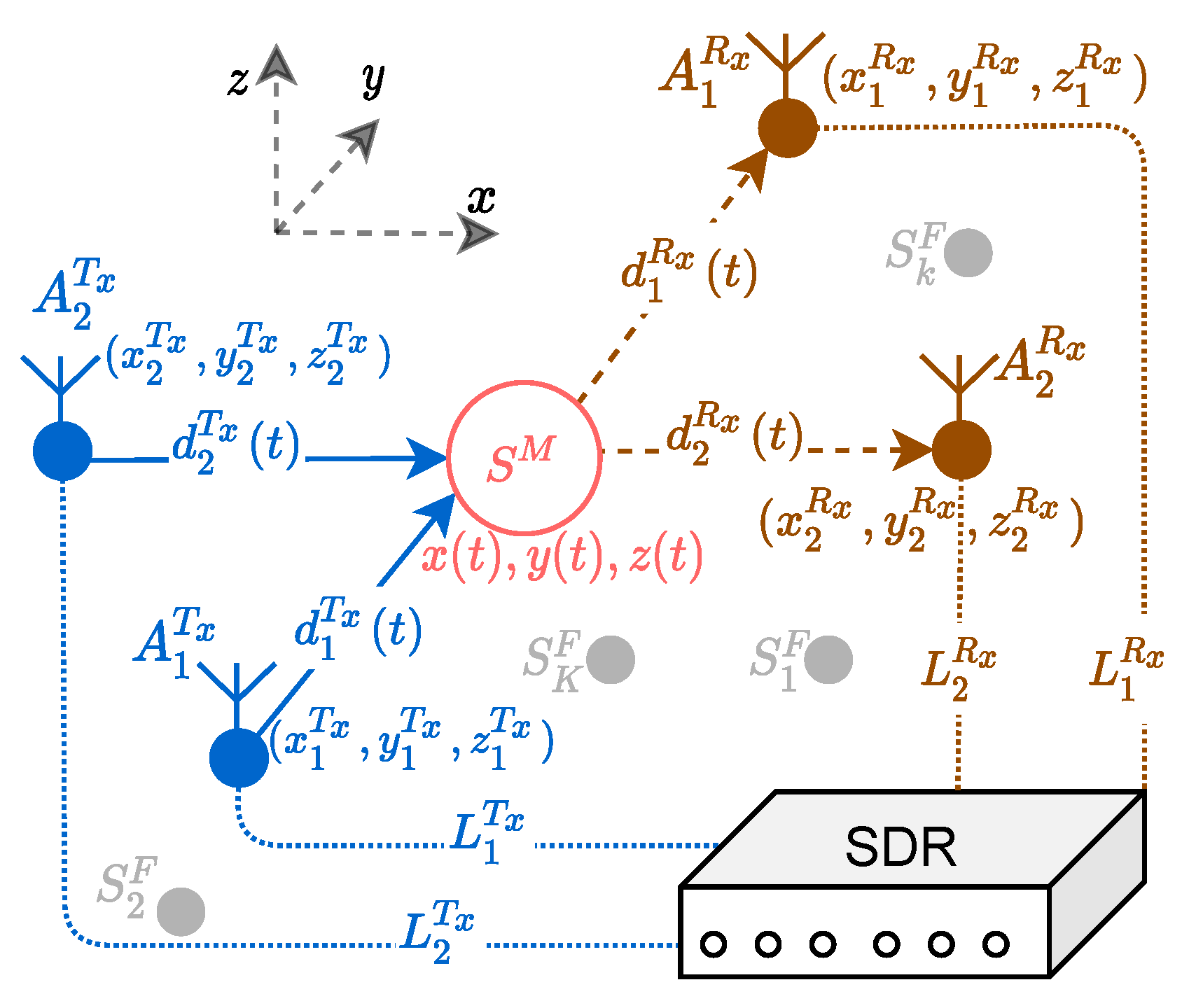
Capturing and tracking nonlinear trajectories of moving scatterers indoors by means of RF-sensing modalities presents a number of challenges. One major challenge is to detect the scatterer trajectories regardless of the radar’s aspect angle, which requires multiple RF sensors. Therefore, for our experiments, a software-defined radar (SDR) known as Ancortek SDR-KIT 2400T2R4 has been configured in a
MIMO radar setup in the presence of a single moving scatterer
as illustrated in
Figure 1. The
MIMO radar system is composed of two radar subsystems, denoted as
and
. The first subsystem (
) is equipped with the transmitter antenna
and the receiver antenna
, whereas the second subsystem (
) is composed of the transmitter antenna
and the receiver antenna
. Although the two radar subsystems are part of the same Ancortek system, they have identical but completely separate signal processing units.
The wireless channel link from the transmitter antenna
to the receiver antenna
via the scatterer
is denoted by
–
, where
. The time-variant channel impulse response (TV-CIR)
corresponds to the link
–
as illustrated in
Figure 1. Moreover, the two subradars operate in the same frequency range but in different time slots. Each subradar is assigned a different time slot according to the TDMA scheme to avoid cross-channel interference between the two subradars. In TDMA mode, the TV-CIRs
and
do not interfere with
and
, respectively, but this is not true for the Ancortek SDR-KIT 2400T2R4 MIMO radar. The commercially available Ancortek MIMO radar system poses the problem of cross-channel interference even in TDMA mode due to its poor interchannel RF isolation. It is vital for system designers to ensure a good RF-isolation in the MIMO radar RF-circuitry, but such insurance is hard to realize for miniaturized and cost-effective RF circuits. Here, this phenomenon of RF leakage between the physical RF channels has been first investigated for the Ancortek radar because it is currently the only commercially available K-band radar that allows to distribute its antennas. However, the same problem may persist in future commercial MIMO radar systems. Note that this analysis provides guidelines for radar system designers to avoid cross-channel interference in their future designs. In addition, the analysis provides a performance criterion for the test and evaluation of the future FMCW MIMO radar systems. Note that the frequency division multiple access (FDMA) scheme is generally not preferred in commercial FMCW MIMO radar systems because of the associated complexity and cost. The FDMA approach limits the instantaneous bandwidth of an FMCW radar, which in turn limits the range resolution of the radar (see
Section 4).
The TV-CIRs
and
are related to
and
, respectively. Under ideal circumstances,
would only receive the signal corresponding to the wireless channel link
–
, and
would only receive the signal corresponding to the link
–
. However, due to the poor interchannel RF isolation of the Ancortek radar system, the receivers of the two radars strongly interfere with each other. This problem is independent of the channel impulse response length. The system is paused between switching from
to
, but the two subsystems, i.e.,
and
, are part of one and the same MIMO radar system having a single RF printed circuit board (PCB). This RF circuit has poor RF isolation, due to which we encounter the problems of RF-leakage and cross-channel interference. The actual measured TV-CIRs
and
incorporating the problem of cross-channel interference are
and
respectively, where
is the weight corresponding to the TV-CIR of the interfering link for
. The system model described by (
1) takes into account that the measured TV-CIR
comprises the desired component
and the three undesired cross-channel interference components
,
, and
. Equation (
2) presents an analogous system model for the cross-channel inference impairing the actual measured TV-CIR
. The weights
depend on the RF isolation between the subchannels of the MIMO radar system. An ideal MIMO radar system fulfills the condition
, implying that
, but in practice, we have
.
To demonstrate the practical relevance of the described problem, we study the cross-channel interference of the Ancortek MIMO radar. Therefore, we measure the nonlinear trajectories of a swinging pendulum in a
MIMO radar setup. Let us consider a swinging pendulum as a physical model for a moving scatterer
as shown in
Figure 1. The choice of a pendulum as a moving scatterer
is appropriate as the trajectory of
can be described by a mathematical reference model as shown in
Section 6, which is important for the cross-validation of the experimental results. The two subradars are positioned on the two-dimensional orthogonal axes
. This arrangement of subradars enables the overall system to capture the scatterer’s motion in the horizontal plane, which is not possible with a SISO radar system. For instance, if the scatterer moves in the direction of the boresight of
, then
will detect the motion, while
may not. Conversely,
will obtain a relatively much stronger movement signature if the scatterer moves in the direction of the boresight of
.
The pendulum is set to swing in a direction parallel to the boresight of
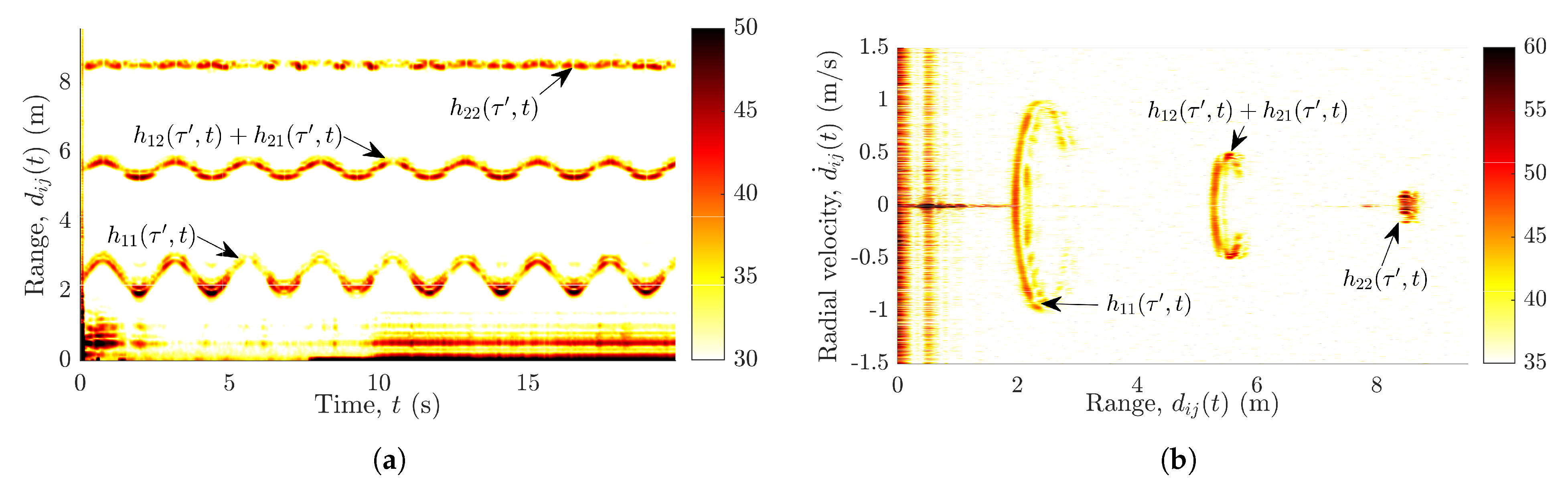
. The pendulum’s trajectories are recorded simultaneously by two subradars. Then, the recorded raw data are processed and the spectrogram is computed individually for each radar unit.
Section 4 provides the details on the computation of the spectrogram from the radar’s raw data. Subsequently, the radial velocity profile is computed from the spectrogram (see
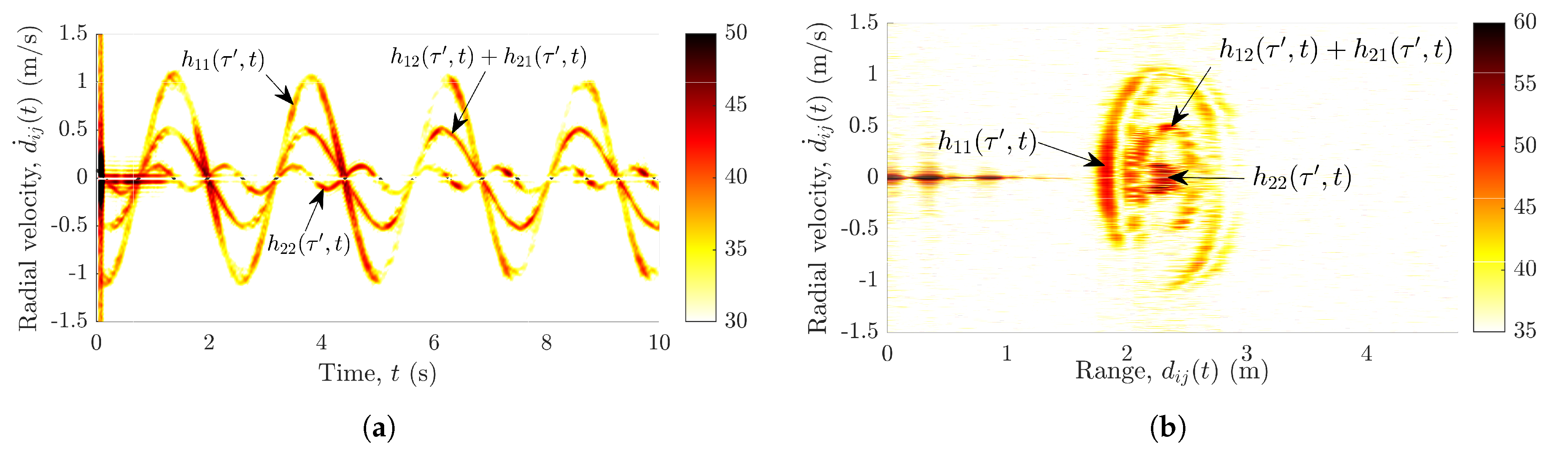
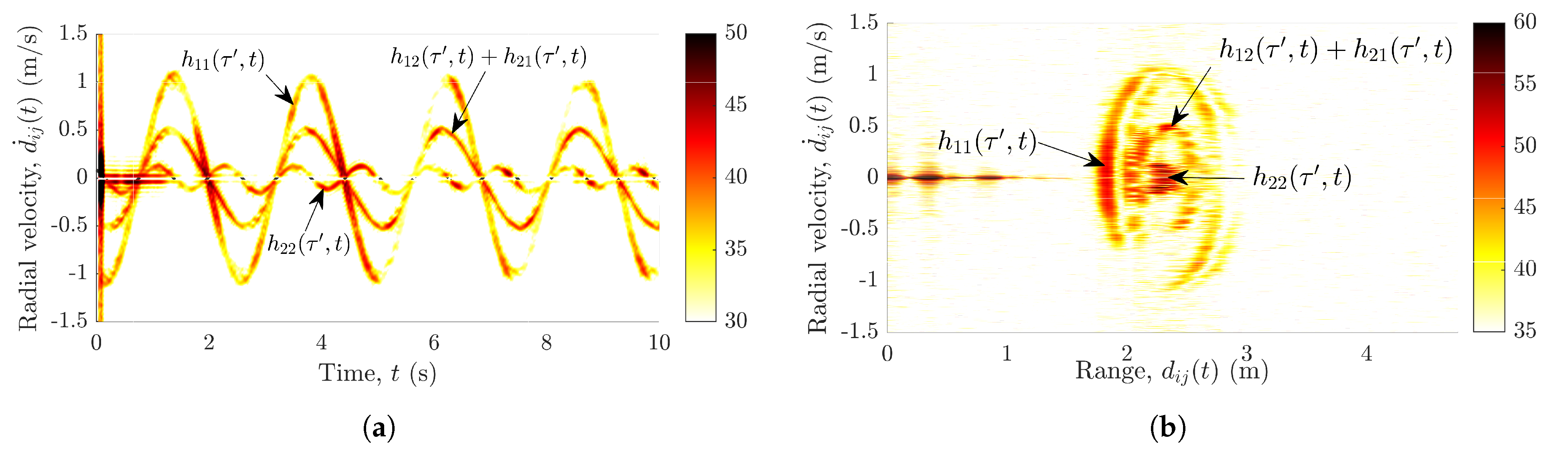
Section 4). The radial velocity profile of the measured TV-CIR
in the presence of the swinging pendulum is shown in
Figure 2a.
Figure 2b shows the motion of the pendulum in terms of the radial velocity
and range
. Although both subradars experience interferences, for brevity, only the measurements from
are shown here in
Figure 2.
Evidently, the radial velocity profile in
Figure 2a not only contains the pendulum’s trajectories from the desired wireless link
–
, but also the undesired trajectories from the interfering links
–
,
–
, and
–
. Similarly,
Figure 2b also aids unmasking the problem of interference by depicting the three separate curves corresponding to the links
–
. As expected, the radial velocities of the pendulum in
Figure 2a,b are identical for the links
–
and
–
. In
Figure 2a,b, the three different components of the swinging pendulum are labeled with the corresponding TV-CIRs
. Furthermore, we have confirmed and validated this observed phenomenon of cross-channel interference by simulating the different wireless links
–
. The geometrical 3D indoor channel model and the extended pendulum model have been presented in
Section 3 and
Section 6, respectively, enabling the simulation of the wireless links
–
.
The aforementioned interferences encountered by the MIMO radar system hinder us to track the scatterer’s motion. To efficiently compute the radial range and radial velocity of the scatterer at each radar, we must first eradicate the interferences shown in
Figure 2. This impels us to propound a solution to the problem of cross-channel interferences, which is presented in
Section 5. For a better understanding of the proposed solution, we first describe the underlying geometrical 3D indoor model and the radar system model in
Section 3 and
Section 4, respectively.
3. Geometrical 3D Indoor Channel Model
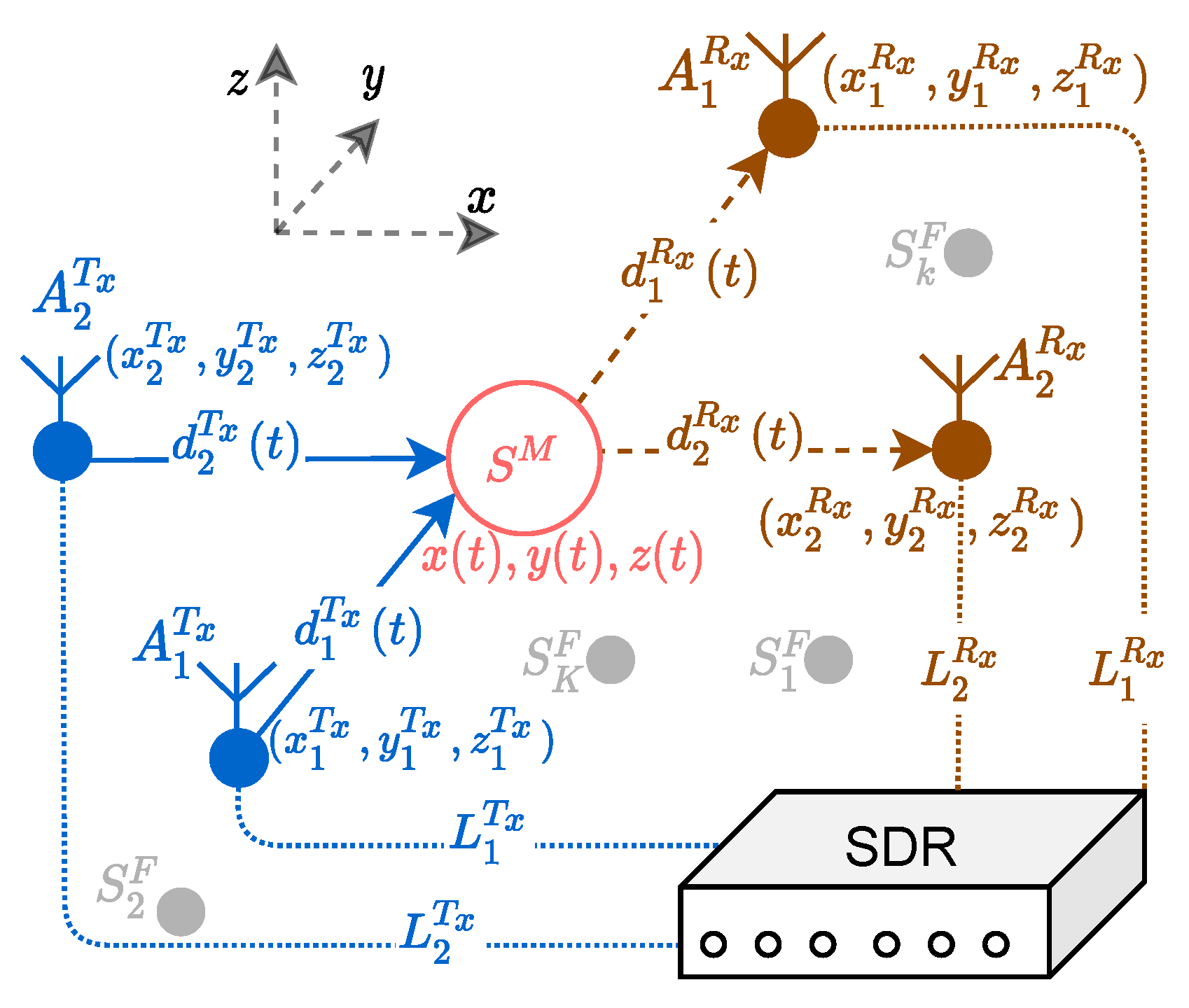
In this section, we consider a
MIMO system deployed in an indoor 3D propagation scenario as depicted in
Figure 3. The transmitter antenna
is placed at a fixed position
for
. Similarly, the receiver antenna
is fixed at the position
for
. The RF cable of length
(
) connects the
ith transmitter (
jth receiver) antenna to the SDR as illustrated in
Figure 3. The 3D propagation scenario consists of a single moving object, which is modeled as a scatterer
with the TV coordinates
as shown in
Figure 3. In addition, the propagation environment consists of
K fixed objects
(
), such as walls, furniture, and decoration items. As the fixed scatterers
are of no interest, they are eliminated from the spectrogram by radar signal preprocessing techniques.
The TV trajectory
of the moving scatterer
, the position
of the transmitter antenna
, and the position
of the receiver antenna
are defined as
and
respectively. The Euclidean distance between the
ith transmitter (
jth receiver) antenna and the non-stationary scatterer
is denoted by
and
, which can be expressed as
and
respectively, where
denotes the Euclidean norm of
x. The TV radial velocity components
and
can be represented as
and
respectively. The radar’s radial range
of the moving scatterer
is given by
of the total propagation distance, i.e.,
Finally, the composite radial velocity
can be expressed as
4. Radar System Model
For a
MIMO TDMA FMCW radar system, the transmitter signal
is defined as
for
, where
is the initial phase,
is the chirp rate, and
is the start frequency. The chirp rate
is defined as
, where
is the stop frequency, and
is the sweep time of the periodic up-chirp signal being transmitted. In the TDMA mode, both transmitters operate in different time slots but use the same waveform as in (
12). The time slots for the
ith transmitter are defined as
for
.
The transmitted signal
is reflected to the radar receiver antennas due to stationary and non-stationary scatterers present in the indoor environment. Therefore, each multipath component associated with the link
–
experiences a propagation delay
for
, where
denotes the total number of scatterers, which is given by
. The received signal, which is modeled as a weighted sum of
back-scattered multipath components, is then passed through the quadrature mixer stage of the radar. At the output of the mixer, we obtain the so-called beat (also known as deramped, dechirped or intermediate frequency) signal. The beat signal
corresponding to the channel link
–
in the presence of a particular scatterer
is given as [
38]
where
is the beat frequency, and
is the phase corresponding to the range
, where
is the speed of light, and
is the radar’s wavelength. The symbol
in (
13) represents the net amplitude attenuation, which is related to the radar cross section of the
lth scatterer, antenna gains, and transmission losses. In the presence of
scatterers in the radar’s field of view (FOV), the composite beat signal
is simply the sum of all beat signals, i.e.,
Furthermore, note that according to the authors of [
39], the complex conjugate of the composite beat signal
is equal to the Fourier transform of the TV-CIR
, i.e.,
where
represents the Fourier transform. The time delay
in (
17) is related to the dual value of
denoted by
as
. Due to relation (
17) and
being a linear operator, the interference components in (
1) and (
2) also affect the measured composite beat signal
.
The composite beat signal
is sampled by an analog-to-digital converter (ADC) module with sampling frequency
, where
is the sampling interval. Let
denote the number of samples taken from
with the sampling interval
, and let
denote the number of chirps within a frame of the FMCW radar. Then, for a single frame duration of
, the sampled beat signal
can be arranged in a raw data matrix
as
where
. Note that the dimension of the raw data matrix is
. Each row of
contains the fast-time data that has been sampled with the sampling interval
, and each column of
contains the slow-time data sampled with the sampling interval
.
The fast Fourier transform (FFT) of the fast-time data is known as the range FFT. The range FFT is applied to the rows of the raw data matrix
to acquire the beat frequencies
of the composite beat signal
(see (
13)). Subsequently, the range maps or the range
for each scatterer can be computed using the relation in (
14). As the observation interval of the range FFT is
, the frequency resolution
of the range FFT is limited to
. Therefore, it can be shown [
40] that the spectral components caused by two different moving scatterers at different ranges can be resolved in the spectrum of (
16) provided that the scatterers are at least
apart in range, where
is the range resolution, and
B is the bandwidth of the radar. Furthermore, from the Nyquist criterion, it can be shown [
41] that the radar’s maximum unambiguous range is
.
Let us define
,
,
, and
as the net change in
,
,
, and
, respectively, over the period of one sweep interval
. Note that a moving scatterer is fixed over an observation window
, because
. Therefore, a small change in the displacement
results in a small change in the frequency of the beat signal, denoted by
. This frequency change
is not discernible in the spectrum of (
16) because
. In order to capture
, we need to observe the phase of the beat signal
over multiple sweep intervals
. The phase of the beat signal is very sensitive and changes significantly from sweep to sweep even for slight displacements of the scatterer. In analogy to (
15), the relation of the phase change
and the displacement
is given as
Therefore, the phase change
of the beat signal can be observed over two sweeps to determine the radial velocity by means of
However, two or more equidistant scatterers with different radial velocities cannot be resolved using the phase difference observed only over two chirps. To capture all the different phase changes
corresponding to the equidistant non-stationary scatterers, the Doppler FFT is applied to the columns of the radar range maps to obtain the micro-Doppler frequencies
. From the micro-Doppler frequencies
, the radial velocities
can be computed as
Furthermore, the radar velocity resolution is given as
. The maximum unambiguous radial velocity can be derived as
.
The components of the radar signal processing of the raw data matrix
are delineated here. First, the Hanning window function
is applied to the fast-time data of the frame, where the window length is equal to the chirp duration
. Then, the range maps are computed by applying the range FFT to the windowed data. To acquire the range evolution of the scatterers over time, the slow-time data can be agglomerated to obtain the processing gain.
After the application of the range FFT, the slow-time data are split into many overlapping or consecutive disjoint segments. Then, for each segment and each range-bin, the short-time Doppler FFT is computed to obtain the local micro-Doppler information of the scatterers. A further processing gain can be achieved by agglomerating the range maps. In other words, for a particular range, the slow-time non-stationary data are composed of the TV micro-Doppler frequencies of the scatterers, which can be obtained by the spectrogram defined as [
42]
where
in which
t is the local time, and
represents the running time. In (
25),
denotes a window function, which is in our case a rectangular function defined as
Finally, from the spectrogram
, we can compute the TV mean Doppler shift as
The measured mean Doppler shift
will be compared with the mean Doppler shift of the analytical model in
Section 6 for the cross-validation of the experimental results and the analytical results.
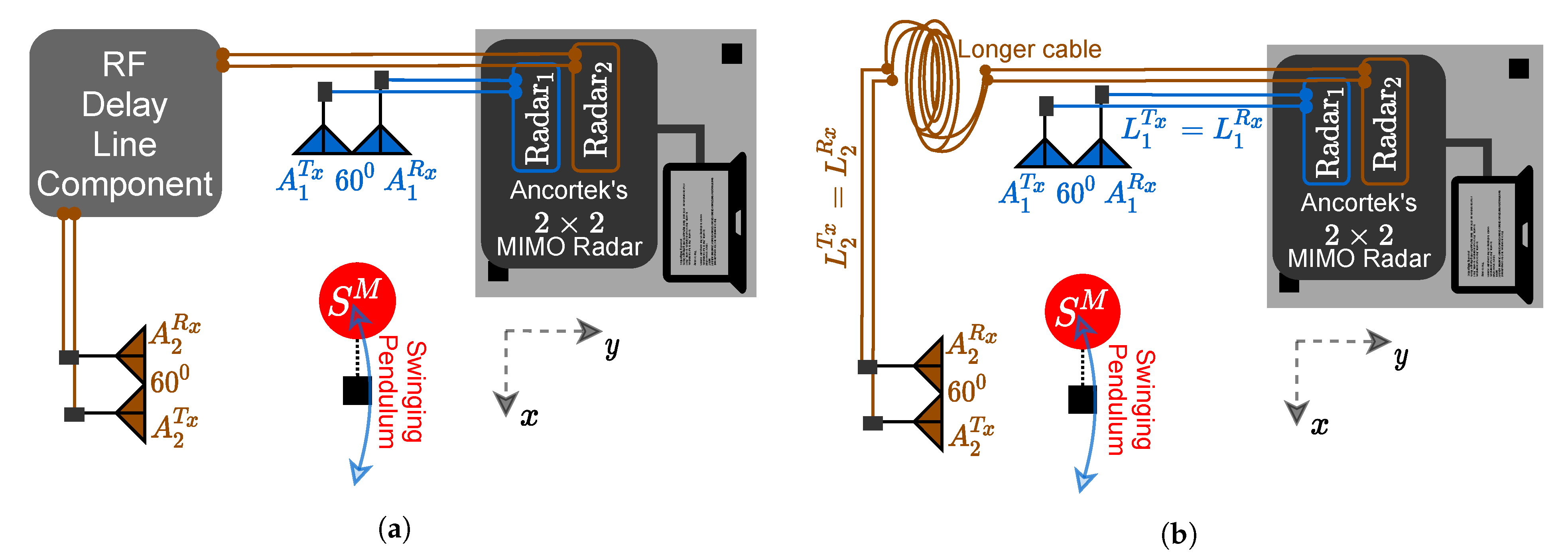
5. Proposed Solution
In this section, we propose a solution to mitigate the problem of the cross-channel interferences described in
Section 2. The proposed approach is to induce a controlled propagation delay in one of the subchannels, so that the desired channel links
–
and
–
can be separated in the range domain of the MIMO radar. To this end, we can use an RF delay line component as a tool for increasing the propagation delay in one of the subradars of the
MIMO radar system shown in
Figure 4a. More conveniently, a pair of RF cables with different lengths can be used instead of the RF delay line component to induce a fixed propagation delay in the channel of interest as shown in
Figure 4b. As illustrated in
Figure 3, a cable of length
connects the SDR to the
ith transmitter antenna
, and a cable of length
connects the SDR to the
jth receiver antenna
.
For each subradar, the cables of the same length are used for the transmitter and the receiver antennas, i.e.,
for
. To obtain a virtual propagation delay in the link
–
, we choose the cable lengths
and
depending on the dimensions of the indoor environment or the desired coverage area of the MIMO radar system. We deploy connector cables with lengths
and
according to the relations
and
respectively, where
represents the length of the area of interest, which is essentially the square area covered by the MIMO radar system. Using (
28) and (
29), the channel links
–
are guaranteed to be separable for the scatterers in the square area
. Therefore, the radar range
in (
10) is controlled using a longer pair of cables for the link
–
. Then, the radial ranges of the channel links
–
follow the inequality
. Furthermore, the links
–
and
–
have identical radial distances, i.e.,
.
Finally, an additional range gating module is implemented after the range FFT module in the radar signal processing chain described in
Section 4. The range profile of the MIMO radar system (obtained by the range FFT module) is partitioned by the range gating module to acquire
,
, and
. In other words, the range gating module segregates the independent trajectories of the scatterers for each channel link
–
. Subsequently, each channel link can now be further processed without the problem of cross-channel interferences. The results of the proposed approach are presented in the subsequent section.
Note that the proposed approach can also be adopted to completely avoid the use of the TDMA scheme. The TDMA scheme limits the PRF of the MIMO radar system, which in turn limits the system’s maximum measurable unambiguous radial velocity . The PRF and the maximum radial velocity decrease by the same factor as the number of subradars of the MIMO system increases. On the other hand, the proposed approach allows multiple RF delay lines to be used for different channel links – so that all the subradars can operate simultaneously without effecting the PRF and of the MIMO radar system. For instance, for an MIMO radar system, the cable difference for different channel links – must follow the inequality for , where .
6. Experimental Results
In this section, we elaborate our measurement campaign carried out using an FMCW-based MIMO radar system (Ancortek SDR-KIT 2400T2R4) operating in the K-band. The detailed analytical model for a swinging pendulum is laid out in this section for the validation of the experimental results. The efficacy of the proposed solution against the interferences of Ancortek’s MIMO radar system is also highlighted by the measurement results.
The measurements were carried out in a semi-controlled environment, a laboratory with the dimensions of
. The laboratory was equipped with many stationary objects such as chairs, tables, boards, and computers. The pendulum bob weighing 3 kg was suspended from the ceiling of the laboratory by means of a rope of length
L. The pendulum bob acted as a single non-stationary scatterer (
) initially resting at the coordinates
. The Ancortek radar was placed inside the laboratory and configured as a
MIMO radar system in FMCW mode. The transmitter antennas
and
, and the receiver antennas
and
were positioned in a monostatic configuration according to
Table 1. The length of the RF cables,
and
, the maximum displacement
and the length
L of the pendulum, and the MIMO radar operating parameters
,
,
, and
were fixed according to the values listed in
Table 1. The two subradars of the MIMO system were configured to share the time according to the TDMA scheme, but even so, the Ancortek system experienced cross-channel interference as stated in
Section 2. Needless to say, due to the TDMA mode of operation, the PRF of the subradars was reduced to half, i.e.,
, as listed in
Table 1.
We now present the analytical model for the pendulum swinging in
xz-plane, so that we are able to cross-validate the experimental results with the analytical results. The pendulum is displaced by
to set it in a swinging motion. The TV nonlinear trajectories of the pendulum can be obtained as [
43]
where
g represents the gravitational field strength. The above model for the pendulum’s trajectories is valid for an ideal pendulum, which swings only in the
xz-plane. The model can readily be used for a pendulum swinging in the
yz-plane by interchanging the right-hand side of the expressions in (
30) and (
31). To analytically determine the radial range of the scatterer, the pendulum model expressed by (
30)–(
32) can be used with (
10) of the geometrical 3D indoor channel model introduced in
Section 3. On the other hand, to obtain the radial velocity using (
11), we must first derive the expressions for
,
, and
, which results in
and
respectively, where
. By making use of the extended pendulum model (
30)–(
35) combined with the geometrical 3D indoor channel model, we can compute analytically the TV radial range components
and the radial velocity components
for all wireless channel links
–
shown in
Figure 1.
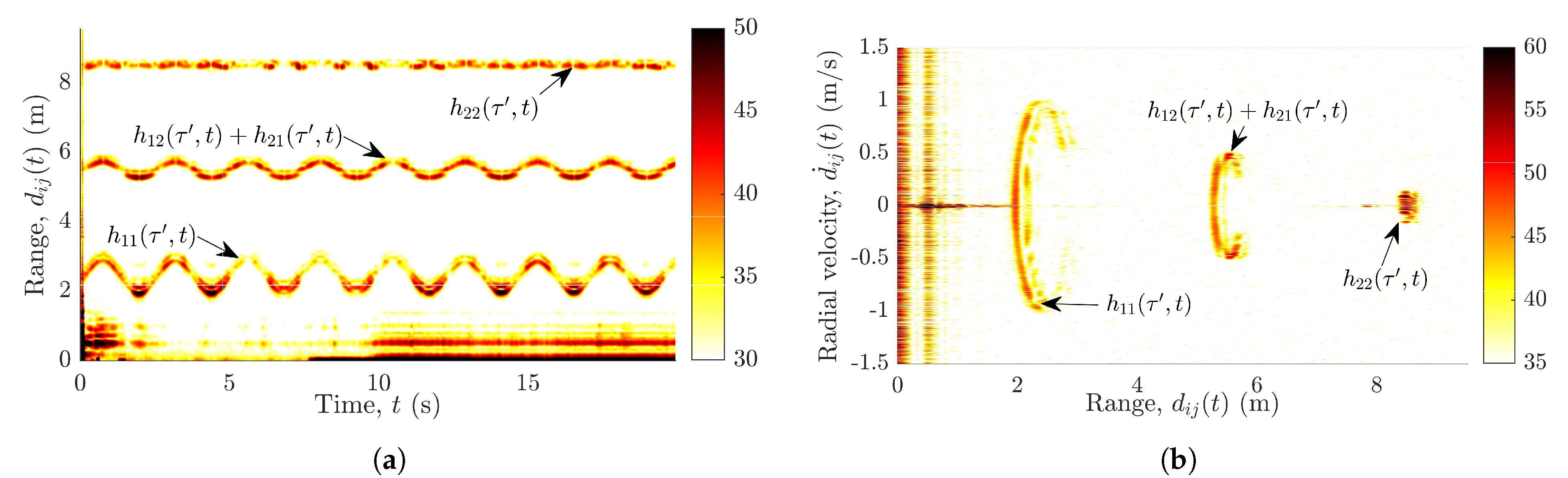
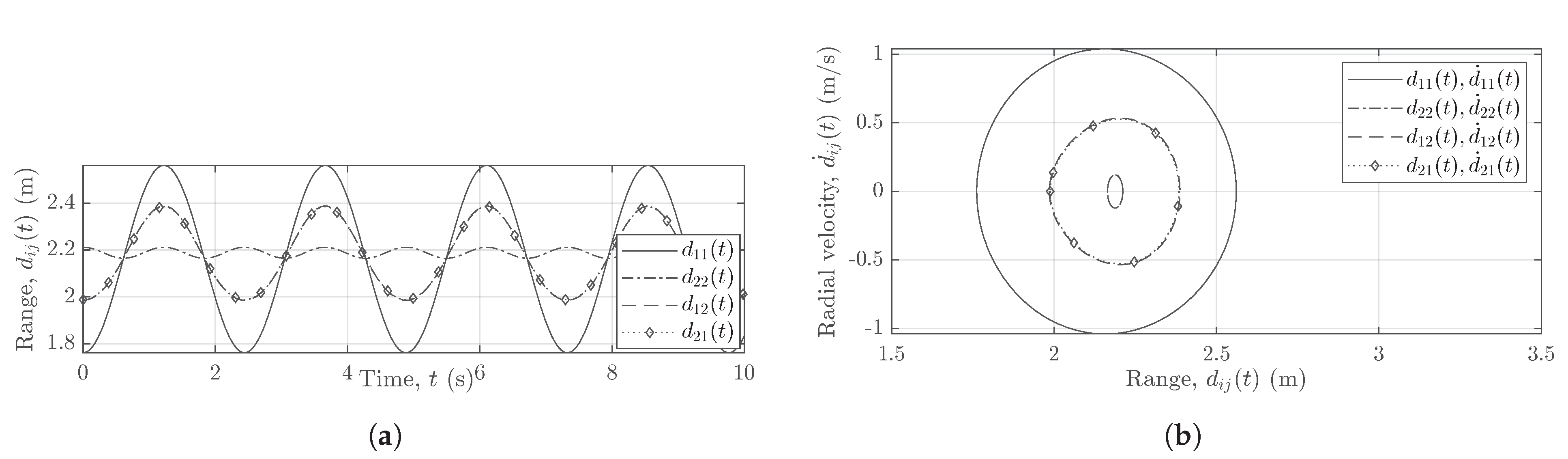
For the experimental setup from
Table 1, the measured radial range profile is shown in
Figure 5a and the measured radial velocity profile is plotted against the measured range in
Figure 5b. The two subradars capture and process the nonlinear trajectories of the pendulum by means of the radar signal preprocessing described in
Section 4. We obtain the processing gain in the radial range profile by agglomerating the slow-time data, whereas the radial velocity profile is acquired by integrating over the range maps. The radial range profile is obtained from the measured beat frequency profile by using (
14). On the other hand, the radial velocity profile is mapped from the measured micro-Doppler frequency profile by utilizing the relation in (
22). The two subradars adopt the proposed solution (see
Section 5) for the mitigation of the cross-channel interferences encountered by the Ancortek MIMO radar system.
Figure 5a,b illustrates the effect of different cable lengths on the measured range profile for a pendulum swinging in the
xz-plane. Due to the deployment of different cables, three distinct curves can be observed in
Figure 5a,b that can be segregated by means of the range gating module (see
Section 5). While the pendulum swings in the
xz-plane, the radial range
in
Figure 5a changes to a much greater extent than the radial ranges
and
or
. A similar inference can be drawn regarding the radial velocities
in
Figure 5b.
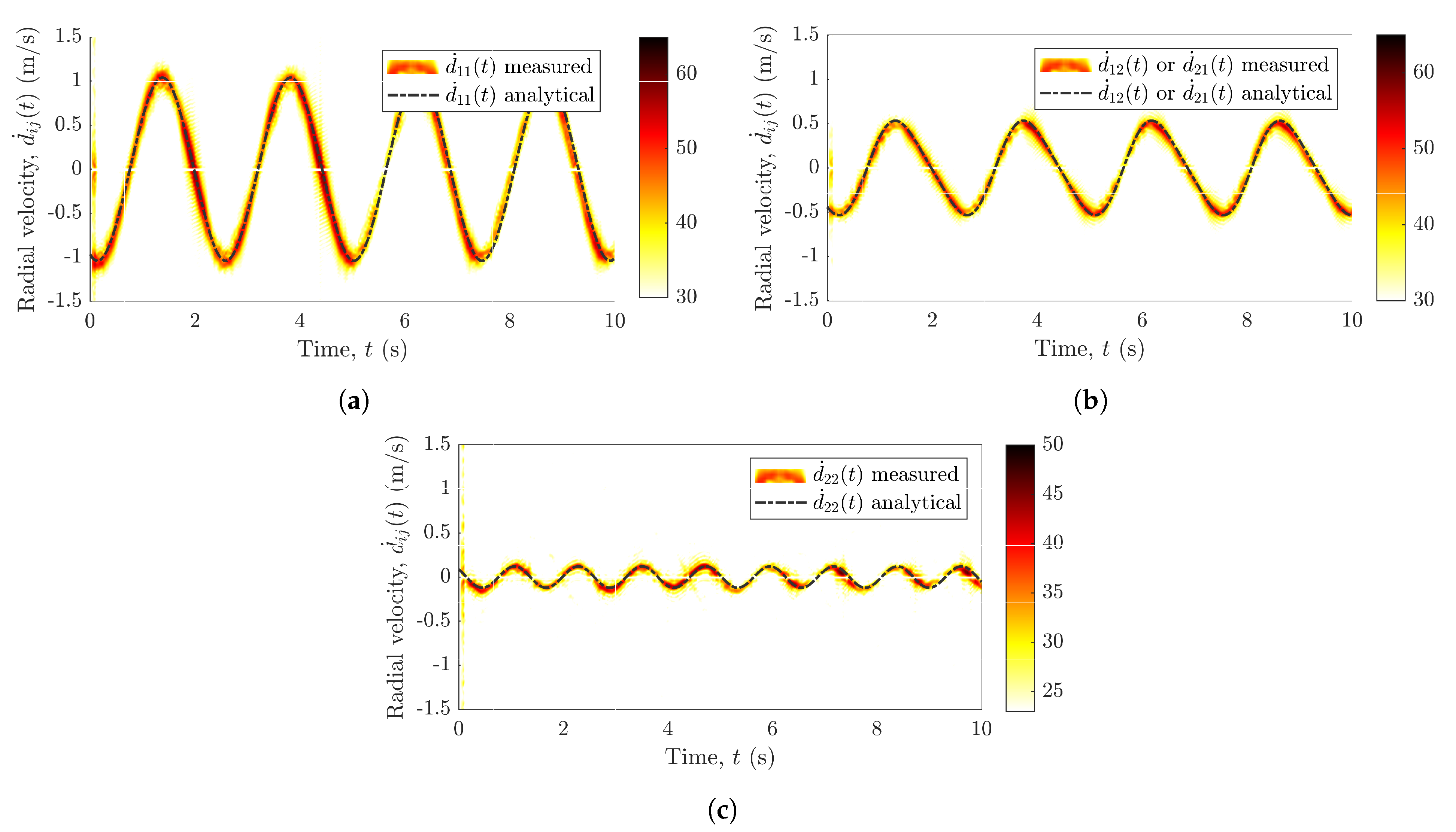
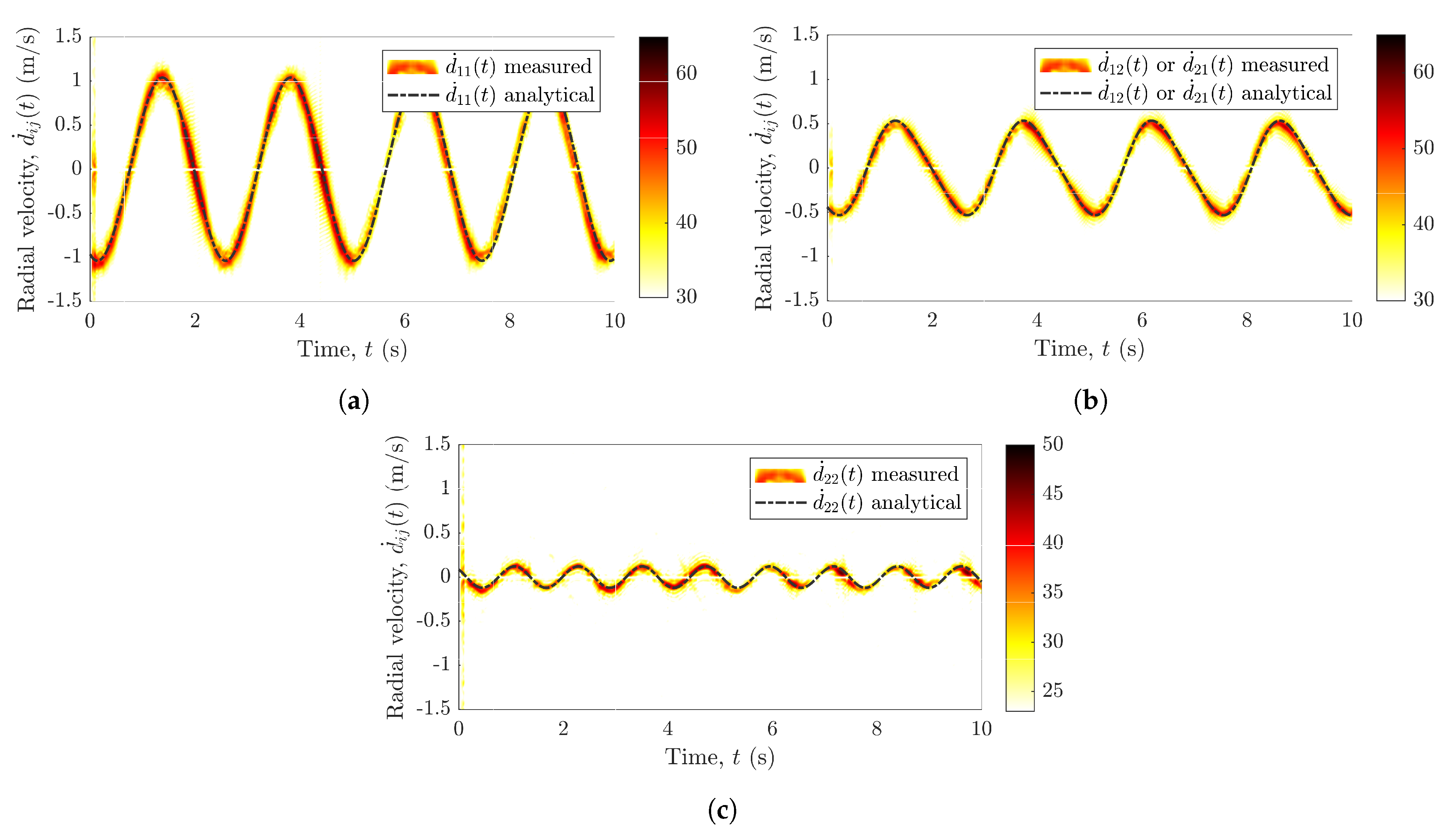
After the application of the proposed interference mitigation approach, we obtain the distinct radial velocity components
,
or
, and
as illustrated in
Figure 6a–c, respectively, where
. The MIMO radar system captures the pendulum trajectories in the
x-axis and
y-axis, which signifies the importance of the deployment of multiple RF sensors in an indoor environment.
Figure 6a,c depicts the radial velocities corresponding to
and
, respectively, whereas
Figure 6b shows the radial velocities corresponding to the channel link
–
or
–
. The pendulum is swinging in the
xz-plane (parallel to the boresight of
), consequently, one can observe that the radial velocity is much higher in
Figure 6a compared to
Figure 6c. Furthermore, as anticipated, the number of crests and troughs in the radial velocity profile of
is twice as high. Note that the radial velocities
and
captured by
and
, respectively, are independent and unique, which cannot be achieved with a SISO system. Moreover, the measured radial velocities are validated by the analytical model that comprises the geometrical 3D indoor model for the distributed MIMO system (see
Section 3) and the extended pendulum model described by (
30)–(
35). A good match between the measurements and the analytical model is shown in
Figure 6, which confirms the validity of the geometrical 3D indoor model and the extended pendulum model. The efficacy of the proposed approach against the interferences can be apprehended by comparing
Figure 6 with
Figure 2a. Evidently, the proposed approach eliminates the cross-channel interferences altogether by separating the measured trajectories for each radar of the MIMO system. Therefore, although the radial velocity components in
Figure 6 are identical to the radial velocity components of
Figure 2a, they are without any interferences.
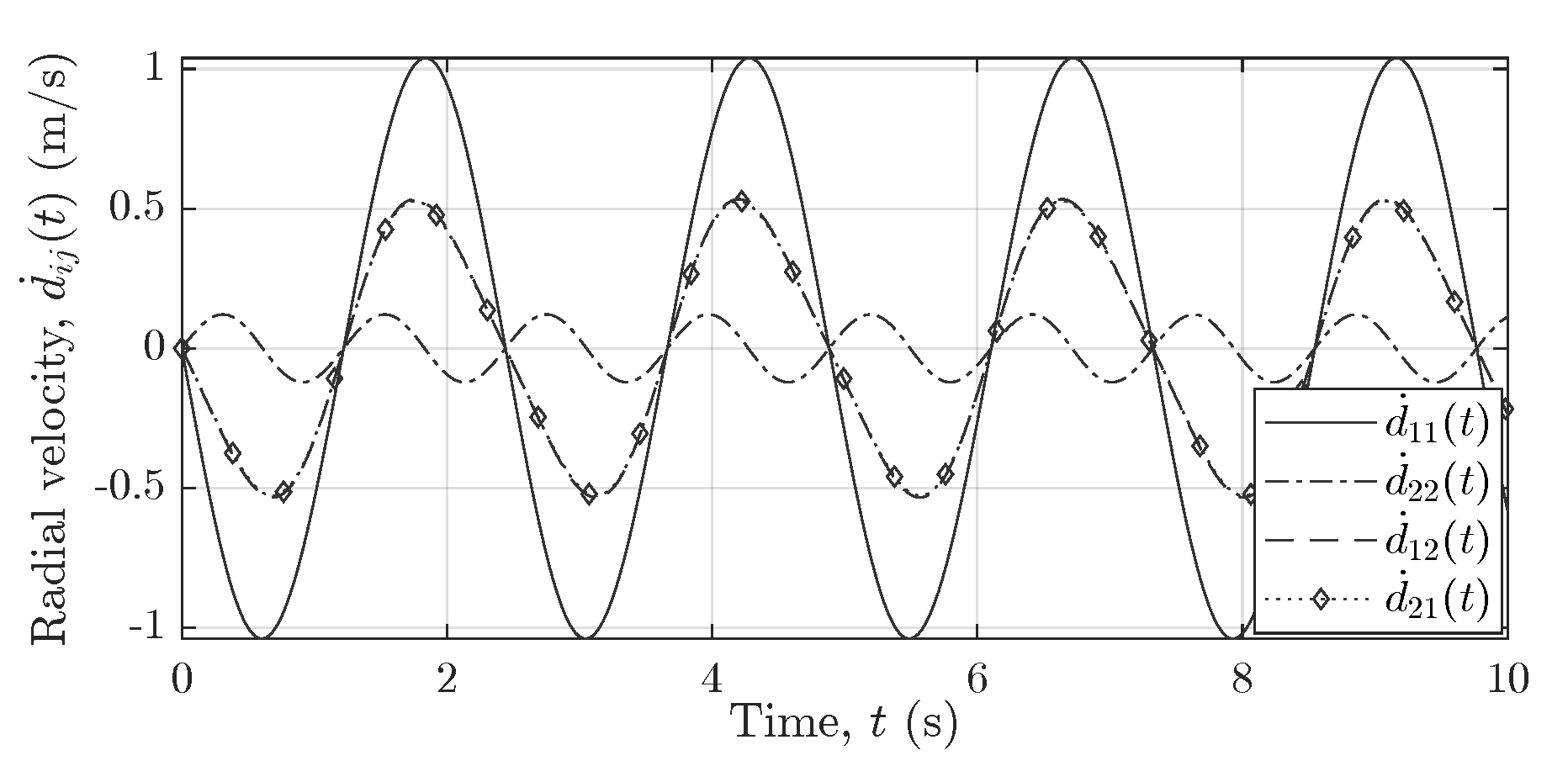
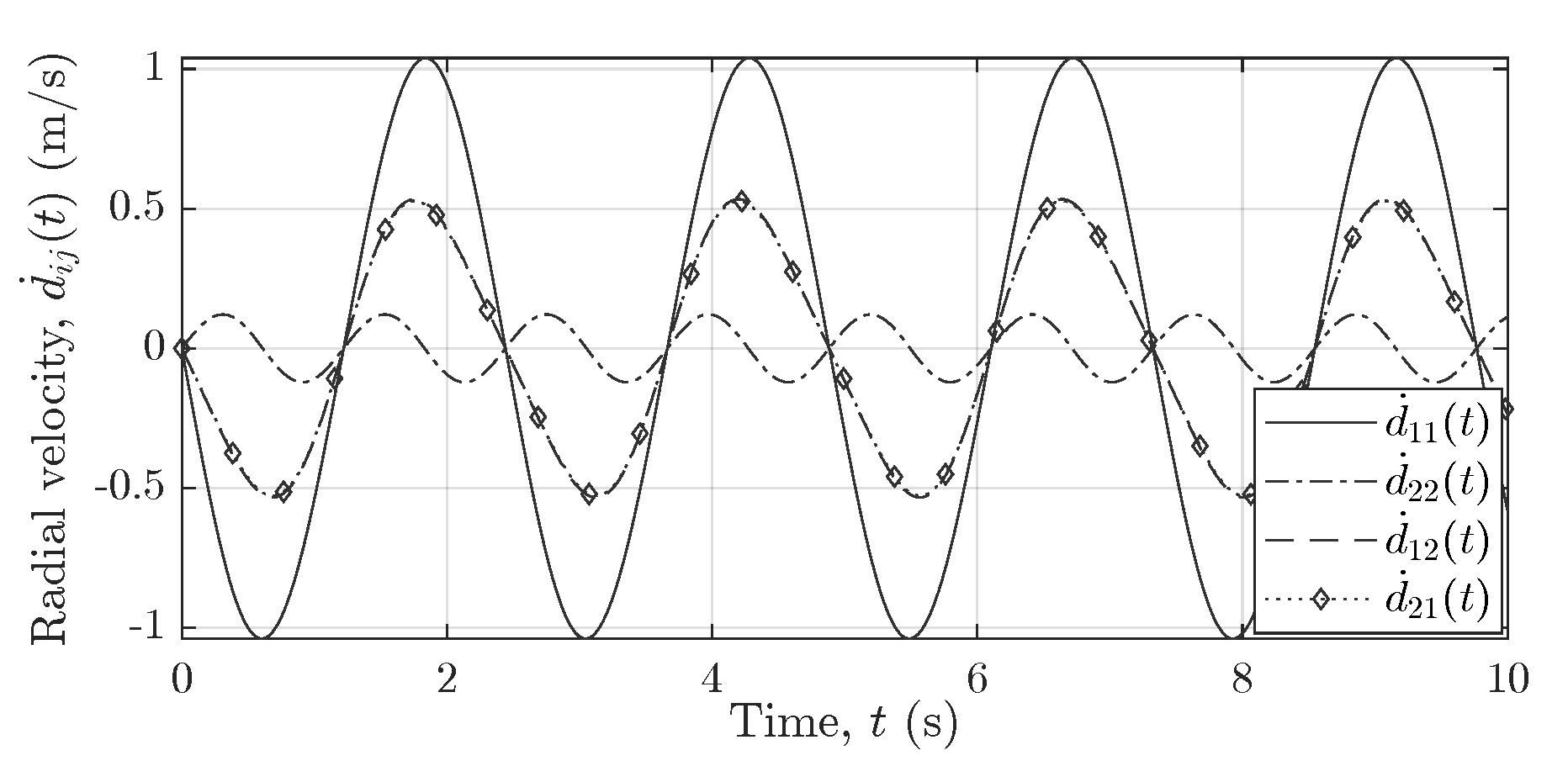
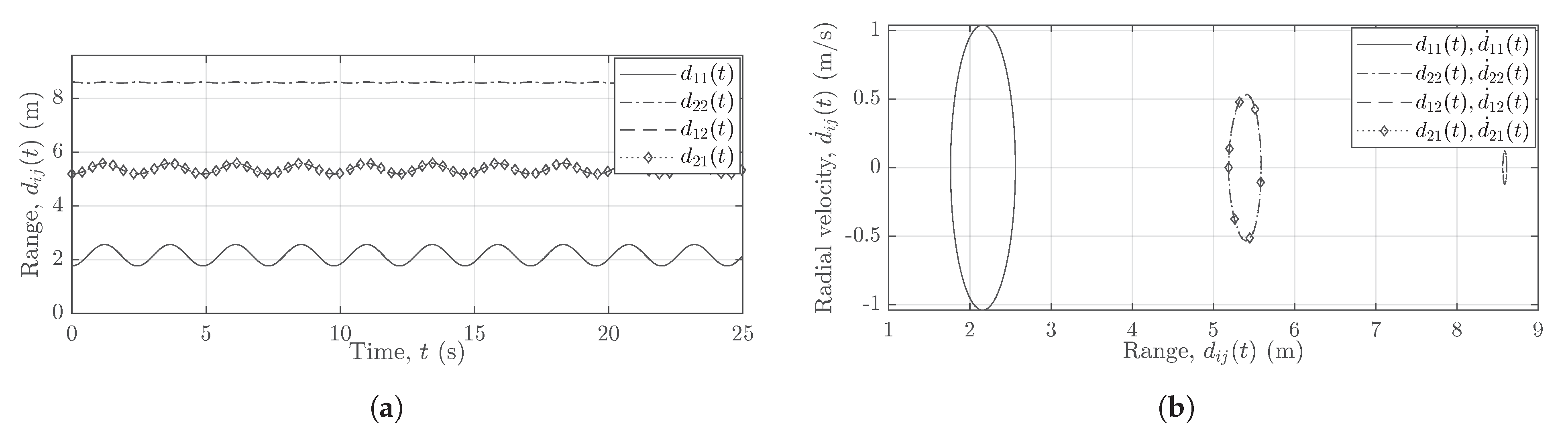
Figure 7,
Figure 8 and
Figure 9 show the reference curves for the nonlinear trajectories of the pendulum, which are used to cross-validate the measurement results obtained for all subchannel links
–
of the
MIMO system.
Figure 7,
Figure 8 and
Figure 9 illustrate the trajectories of the pendulum swinging in the
xz-plane (parallel to the boresight of
) within the FOV of the two subradars.
Figure 7 illustrates the analytical radial velocity components
that do not depend on the deployment of longer cables.
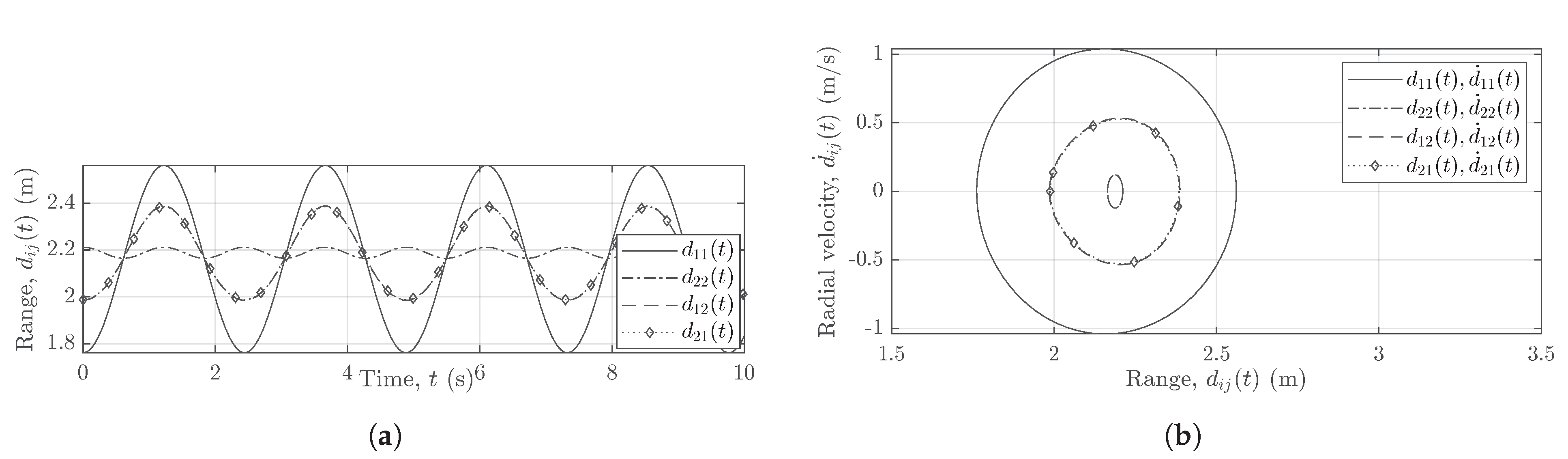
Figure 8a,b shows the scenario when the two subradars of the MIMO system use the same cable lengths, i.e.,
, whereas
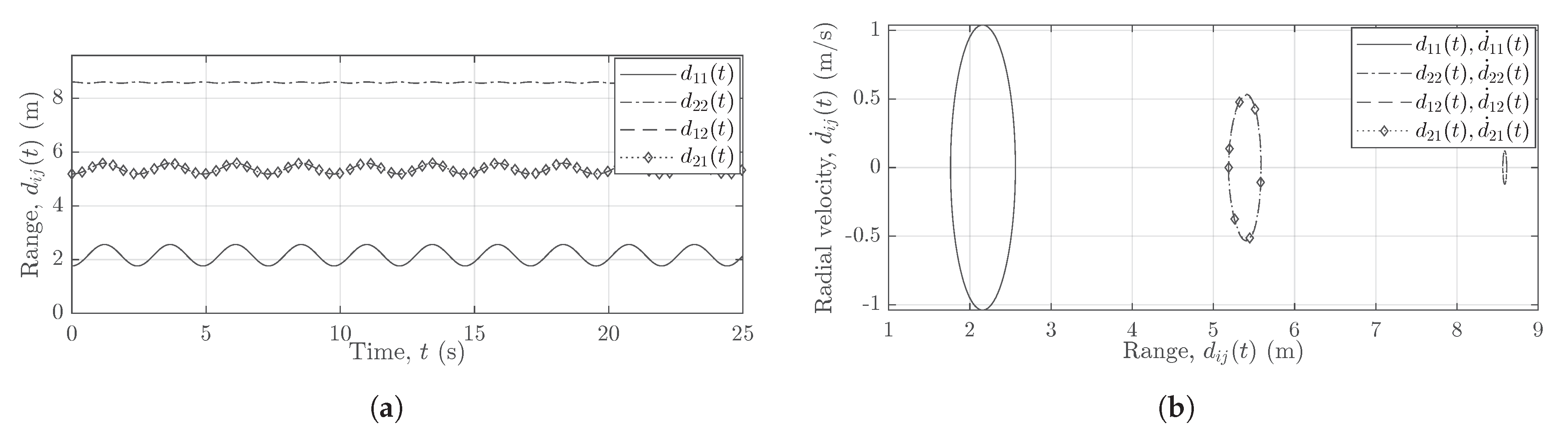
Figure 9a,b shows the case when the two subradars use different cable lengths, i.e.,
.
Figure 9, analogous to
Figure 5, shows the effect of longer cable lengths
and
on the radial ranges
.
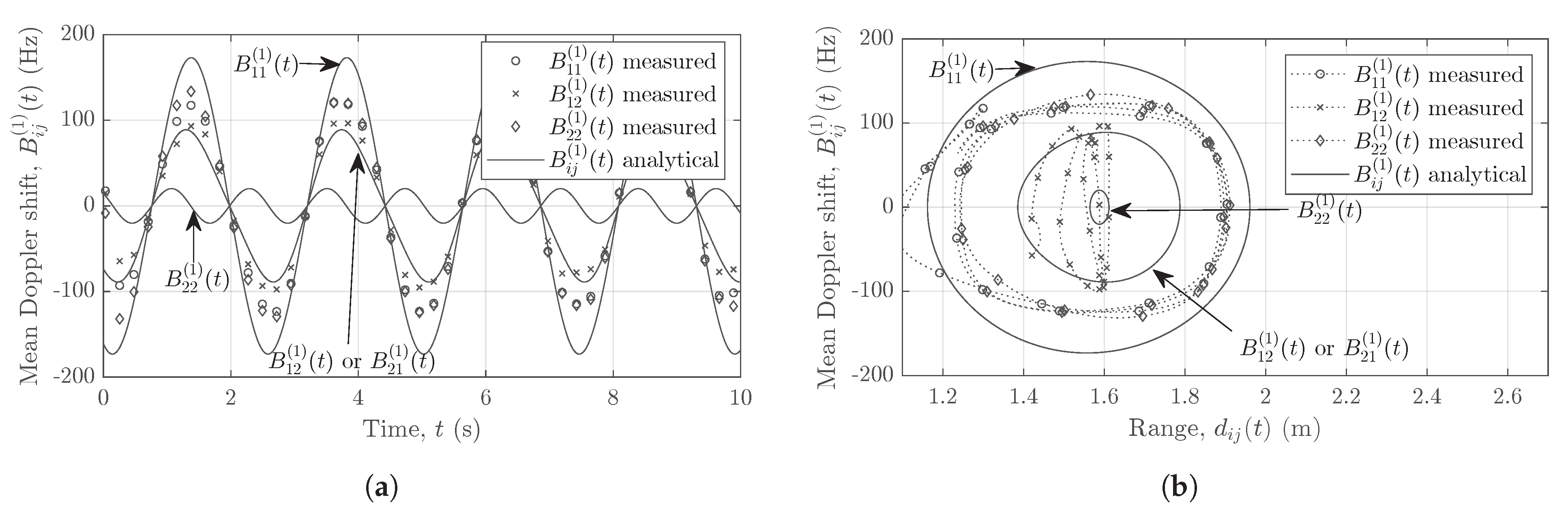
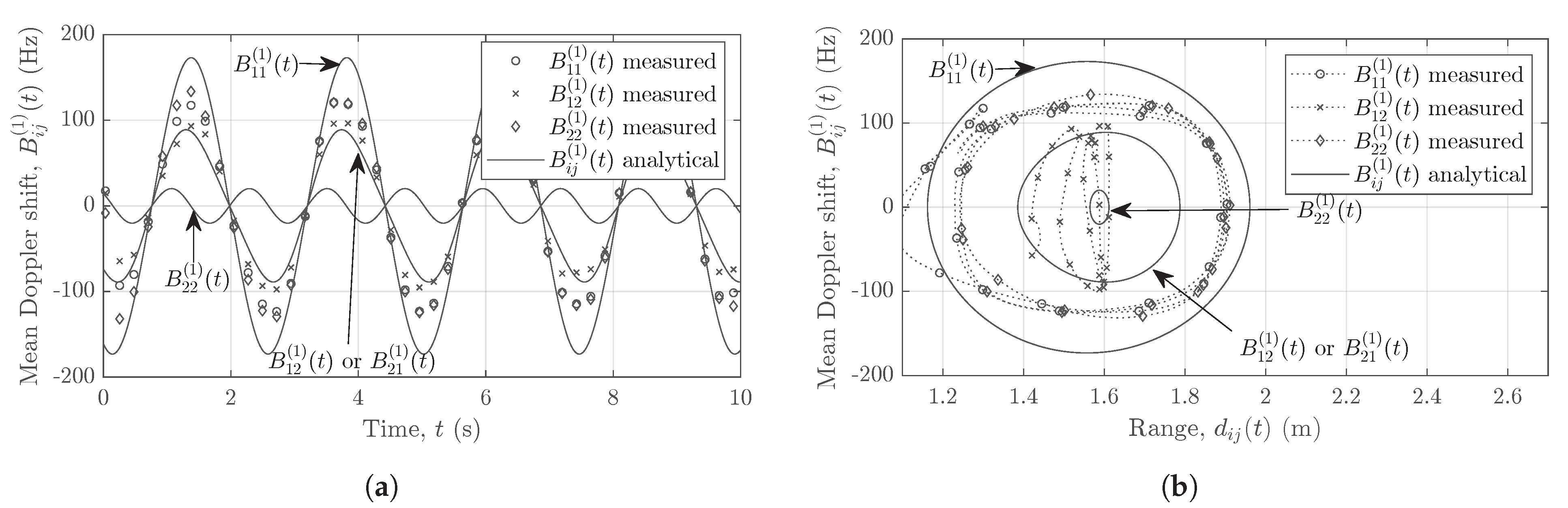
The relation in (
27) is utilized to obtain the measured mean Doppler shift
for all channel links
–
in a
MIMO system. Analogous to the computation of the mean Doppler shift, the mean radial range is obtained from the range profile. The analytical and measured mean Doppler shifts
are illustrated in
Figure 10a.
Figure 10b shows the analytical and measured mean Doppler shifts plotted against the range of the moving scatterer
. Clearly, a considerable mismatch exists between the analytical and measured mean Doppler shifts due to the interferences.
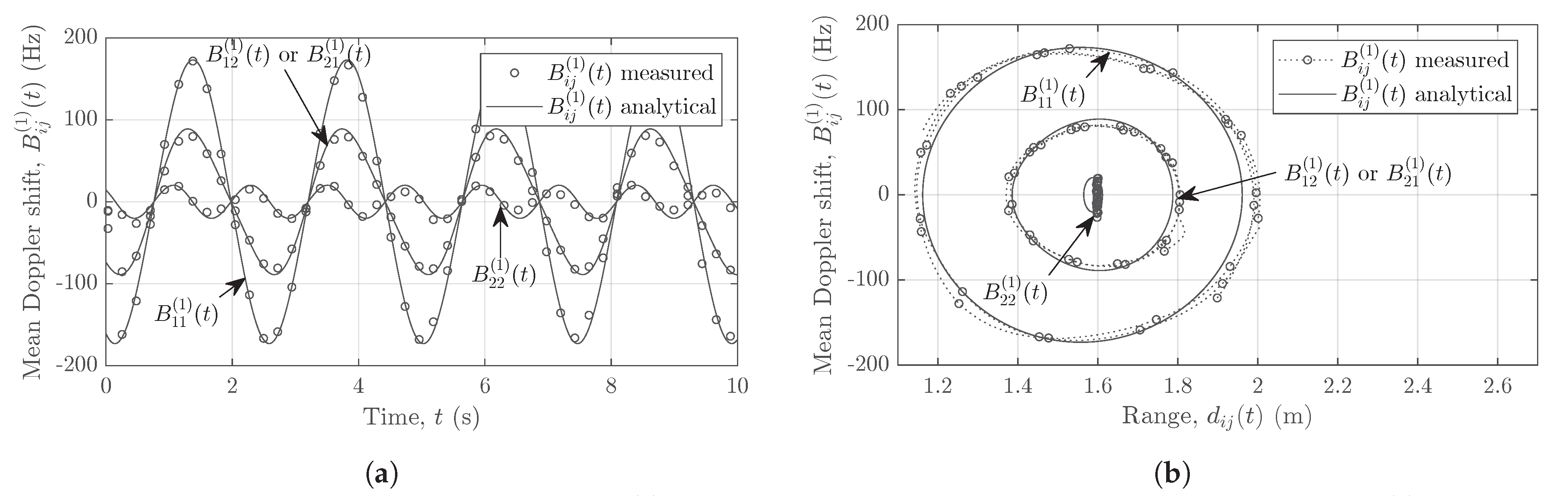
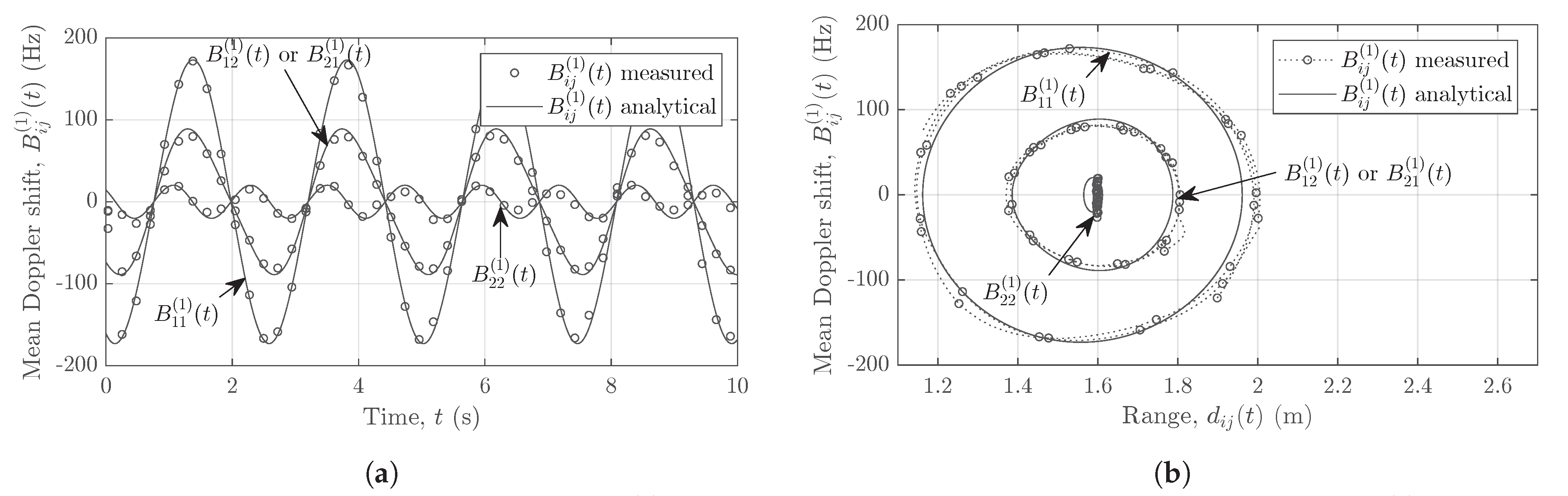
On the other hand, using the proposed approach, we obtain the segregated nonlinear trajectories of the pendulum as shown in
Figure 11.
Figure 11a illustrates the mean Doppler shift of the pendulum swinging in the
xz-plane over a period of 10 seconds. A good match between the measured and the analytical mean Doppler shifts is observed for all channel links
–
.
Figure 11b shows the mean Doppler shift plotted against the mean radial range. Due to the fine Doppler resolution of the FMCW radar, the measured Doppler information matches very well with the analytical results in
Figure 11, whereas an adequate match exists between the analytical and measured range due to an adequate range resolution of the system.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}