
An Enhancement for IEEE 802.11p to Provision Quality of Service with Context Aware Channel Access for the Forward Collision Avoidance Application in Vehicular Ad Hoc Network


Abstract
:1. Introduction
1.1. Motivation and Objectives
1.2. Novelty and Contributions
- The protocol improves IEEE 802.11p performance for supporting forward collision warning applications in VANET. The scheme improves the delivery of emergency (event) messages by prioritizing them over the non-emergency messages by using an adaptive contention window.
- The proposed scheme provides a service differentiation among the emergency and non-emergency message in the safety category of IEEE 802.11p by implementing a dynamic contention window for the emergency packets based on the priority of the packet from the node at the instant. The non-emergency message, the routine safety message in IEEE 802.11p, follows the same strategy that was implemented in IEEE 802.11p.
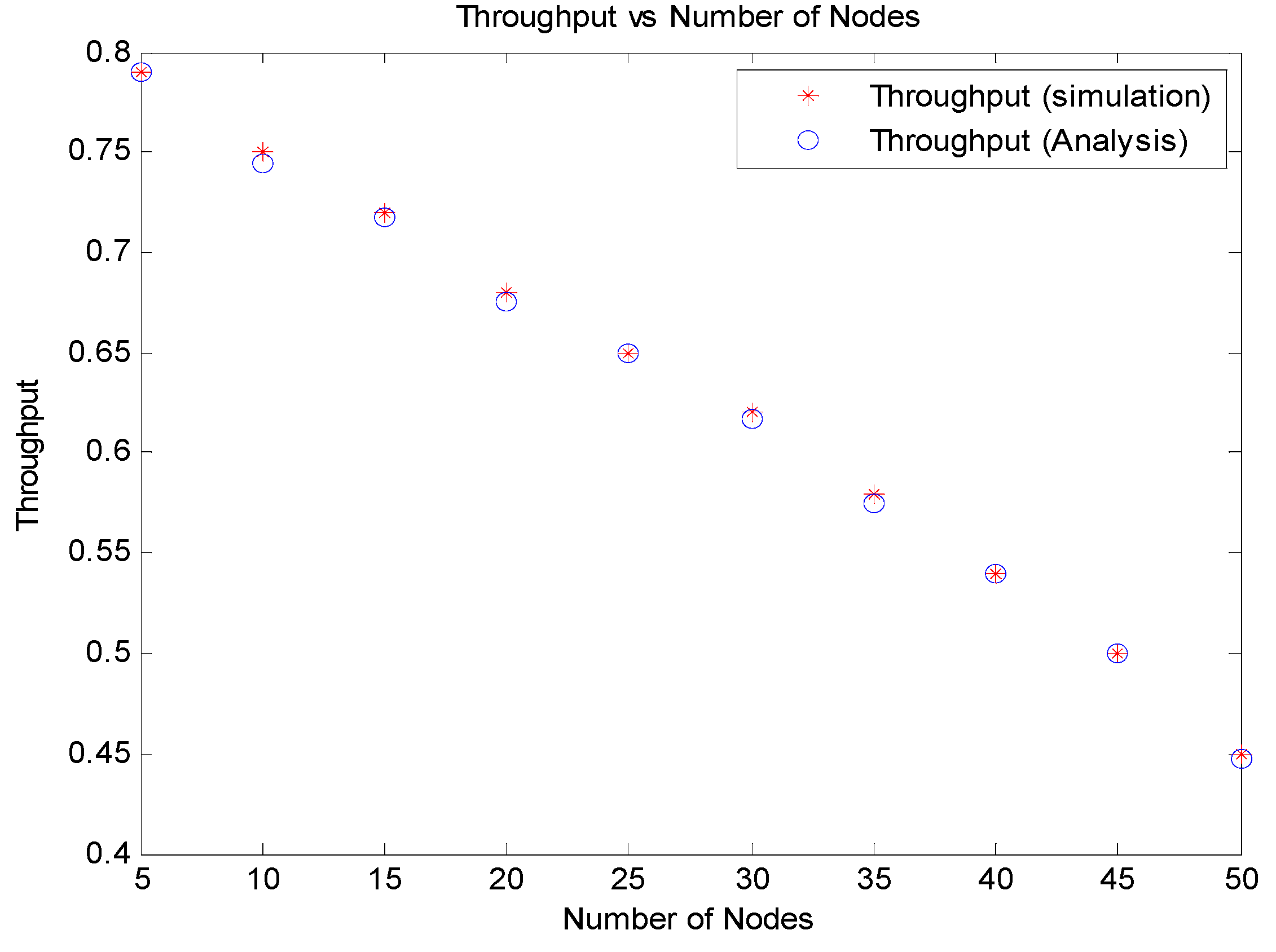
- The performance of the broadcast with service differentiation for emergency messages over non-emergency message in the safety category of IEEE 802.11p with an analytical model is studied.
1.3. Paper Organization
2. Related Work
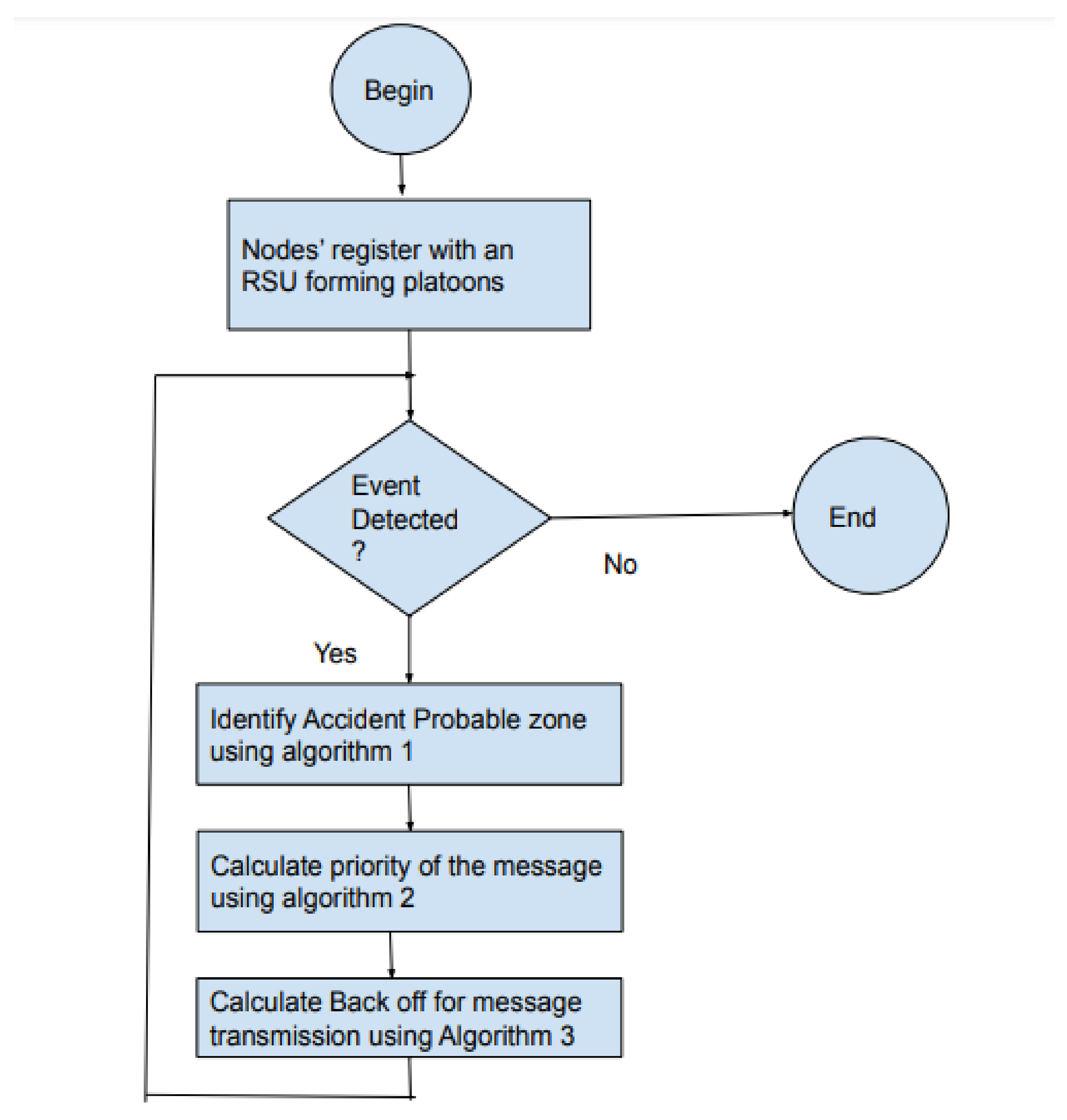
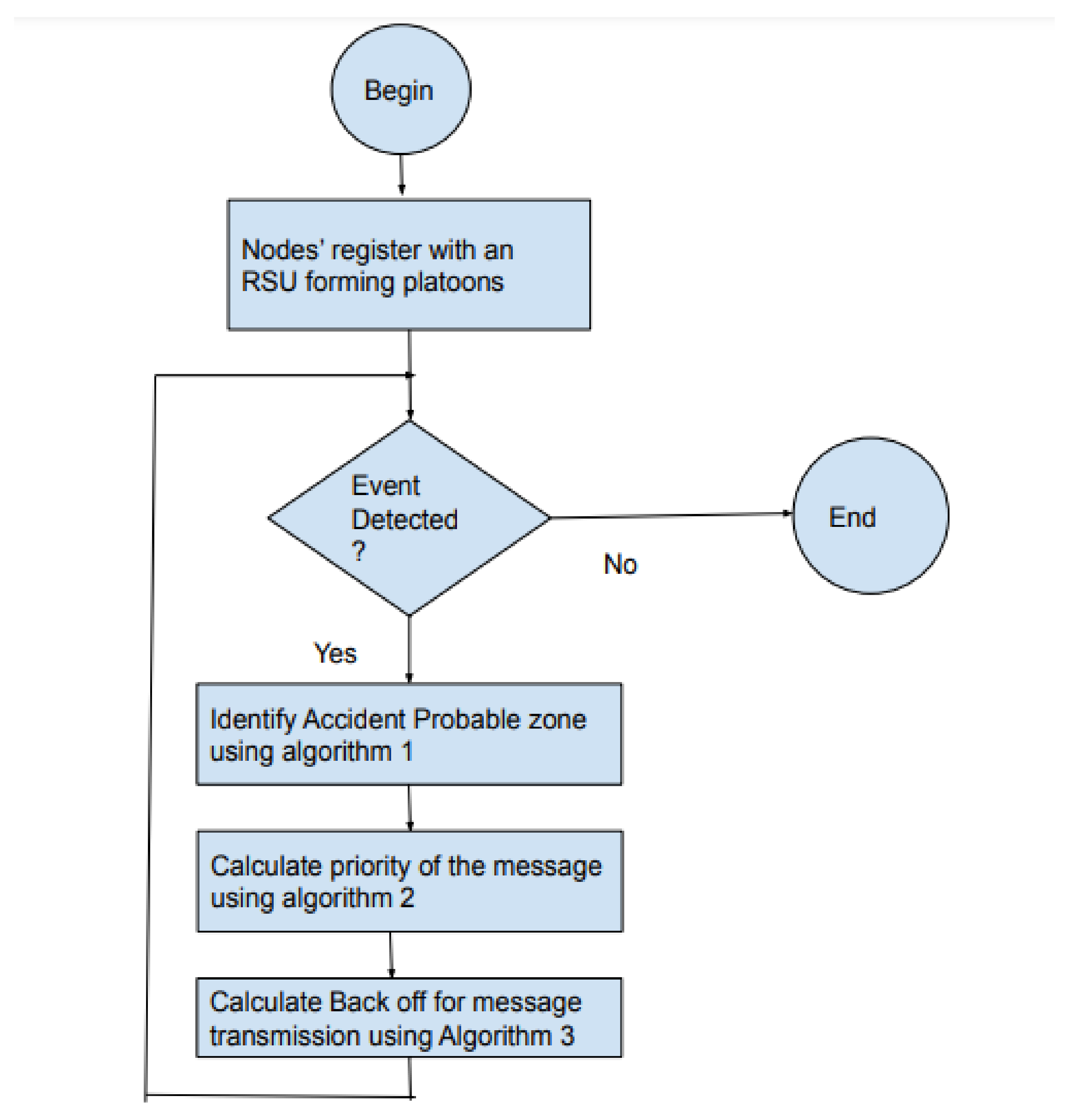
3. Proposed Method: Priority-Based Cooperative MAC (PCMAC)
3.1. Relevance of the Proposal
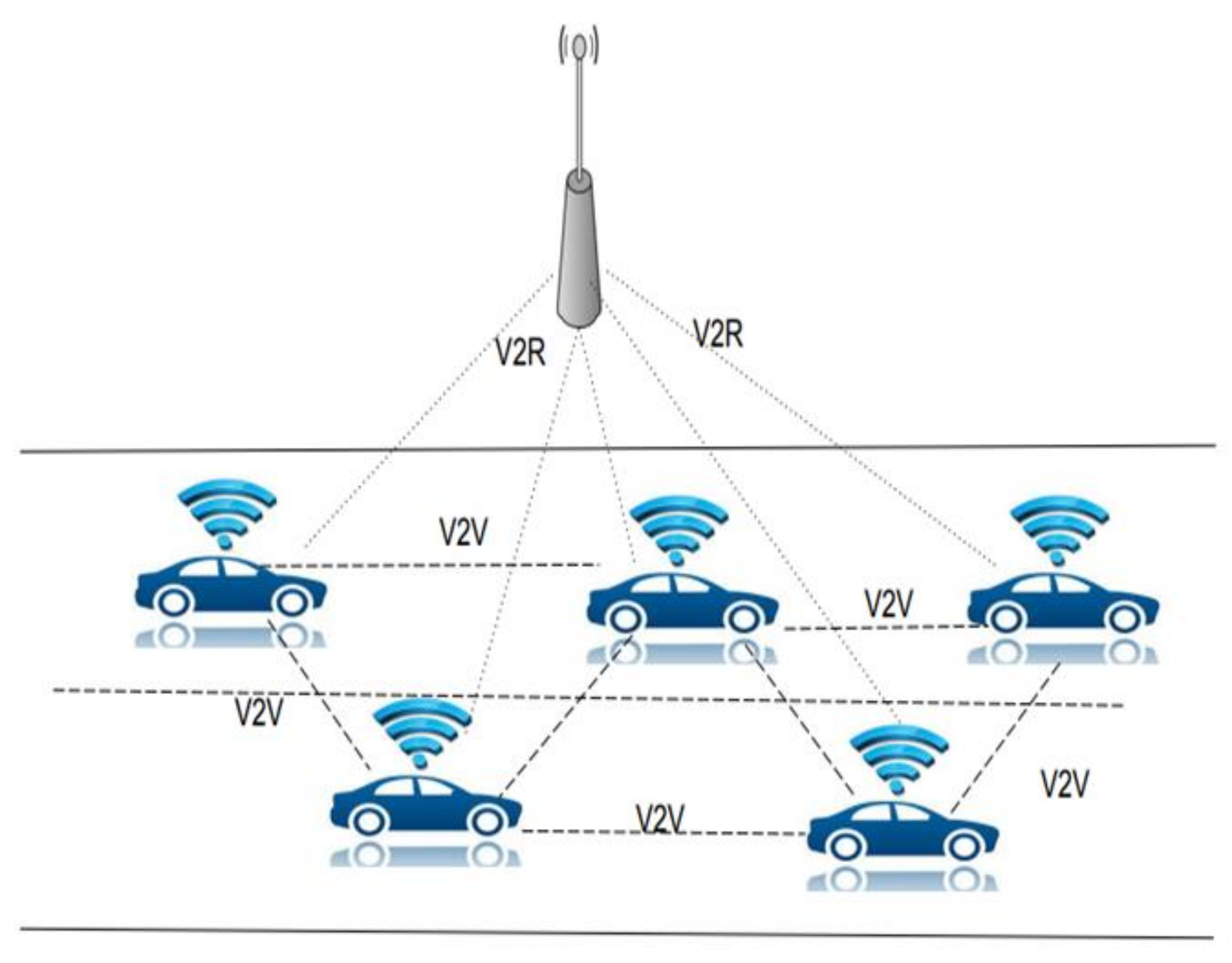
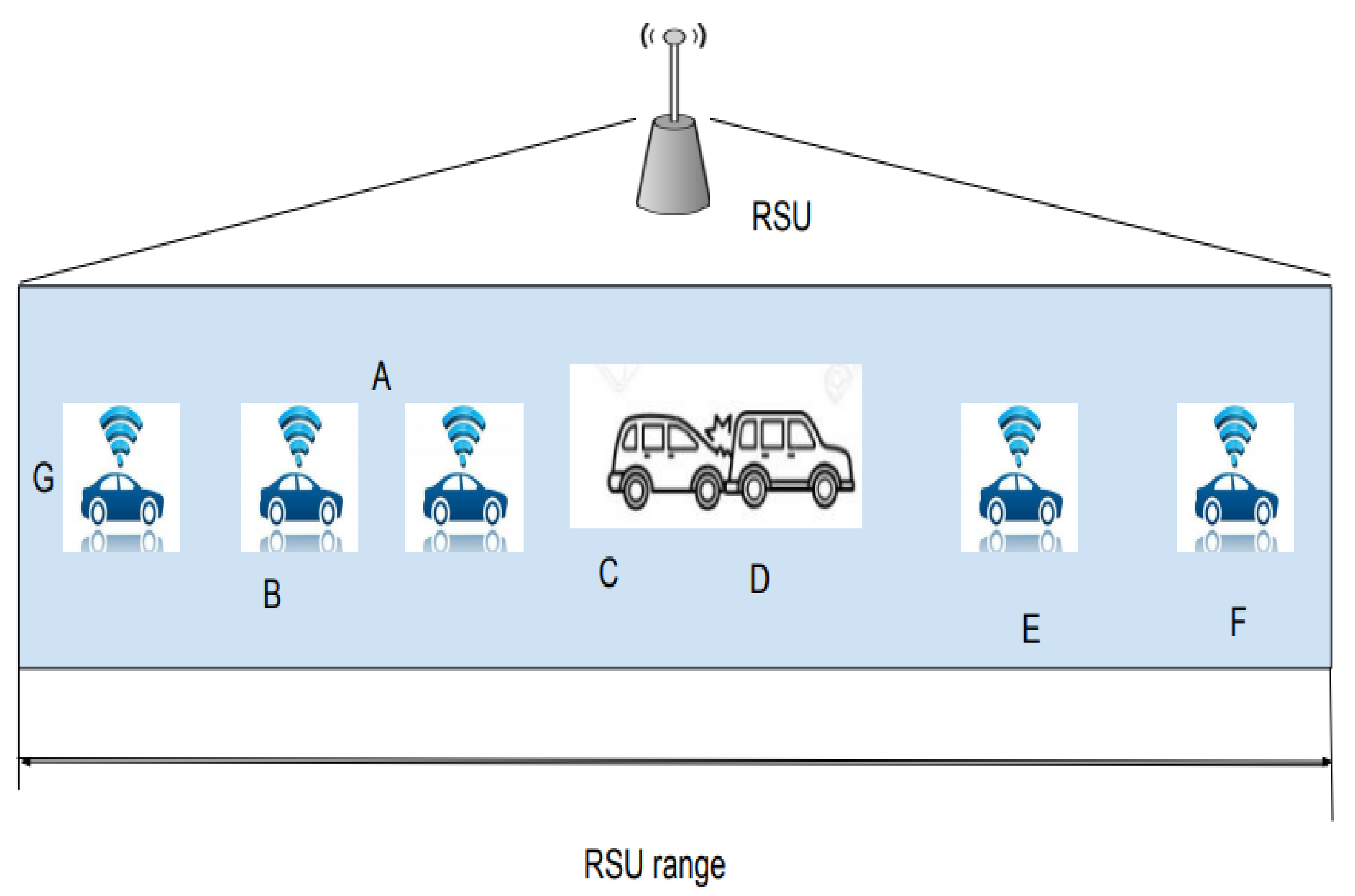
3.2. Scenario
3.3. Priority Calculation
| Algorithm 1: Algorithm to find the accident zone |
| 1: procedure ACCIDENT ZONE (xs(t), ys(t), R, xr, yr) |
| // location of vehicle in accident, R-Range and Range coordinates |
| 2: ds(t) = |
| 3: while ds(t) ⇐ R/2 do |
| 4: Read Accident Zone from |
| 5: while ds(t) > R/2 do |
| 6: B(t) = R − ds(t); |
| 7: Get and ; |
| 8: Read Accident Zone from |
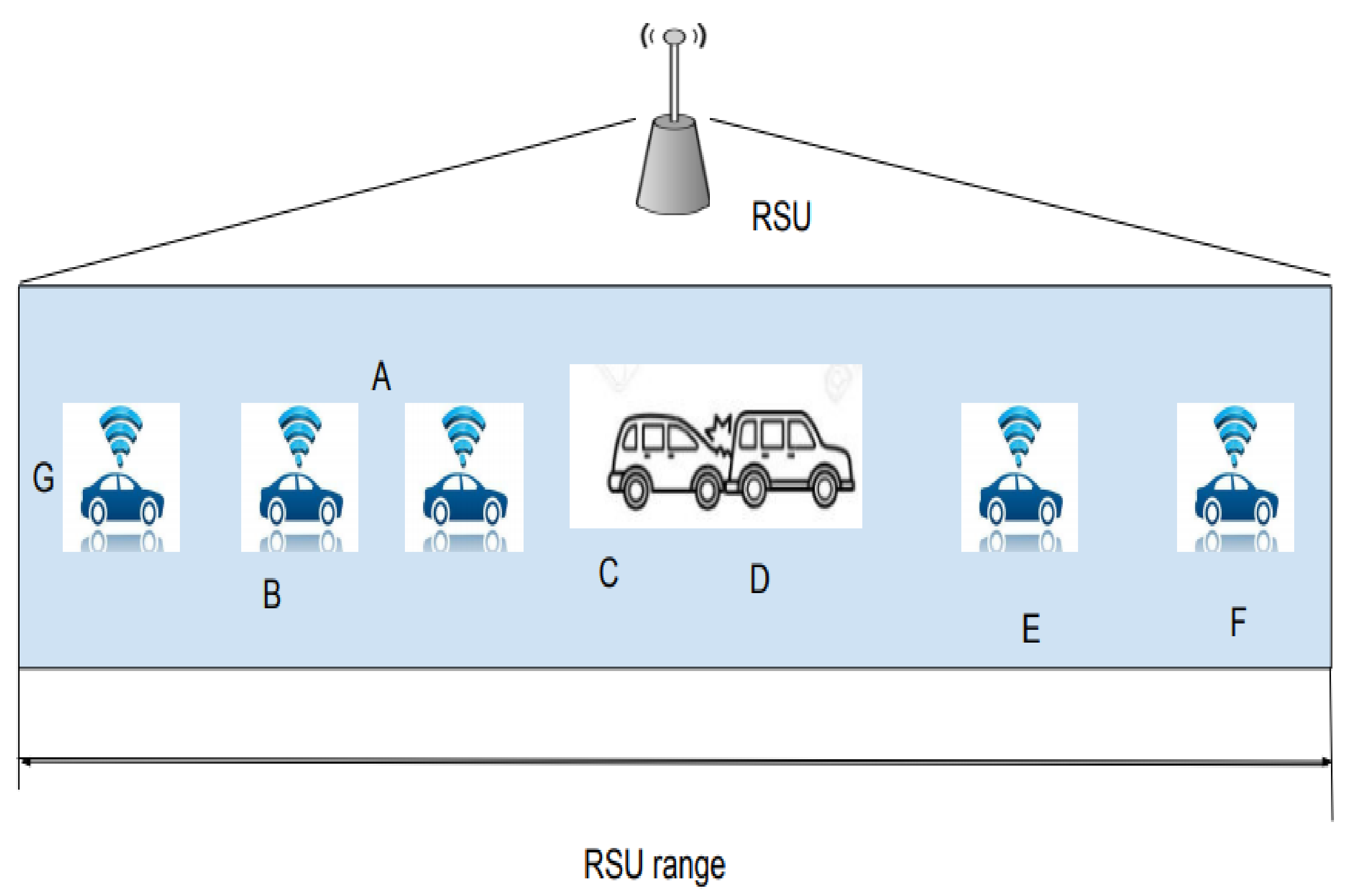
- Impacti(t): This defines the severity of the event. This paper mainly concentrates on the forward collision warning application. The forward collision happens when the vehicles behind are not able to control their speed as the vehicle in front stops abruptly. This can be avoided by quickly alerting the vehicles behind the broken vehicle so that the drivers can control the speed of their vehicle to avoid successive collision. The maximum number of collisions that can occur can be equated to the number of vehicles behind the vehicle that has entered a collision. Impacti(t) measures the severity of the accident. It is calculated as a function of the factor of the number of nodes that enter into the accident probable zone with the total number of nodes in the platoon. The vehicles close to the broken node have more chances to collide. Therefore, we consider a probable zone of accident occurrence. This zone is defined based on the location of the accident. If the vehicle in the accident has a distance to cover the range that is less than half the range, it will consider vehicles between its point and half of the range. Otherwise, it will look for the vehicles between the maximum range and its point. Algorithm 2 shows the steps to determine the accident probable zone. Equation (1) defines Impacti(t) of a vehicle at an instant t.
- ADi(t): The average relative distance of nodes with respect to nodei at instant t. The average relative distance of the vehicles with respect to the vehicle involved in the accident in the probable area of accident occurrence is considered. This can be represented as Equation (2). The nodes with a less than average relative distance will be more highly affected. The lesser the average relative distance, the higher the chance to have a forward collision.
- AV(t): The average velocity of the platoon at instant t. This can be represented as Equation (3). The platoon with a high average velocity will be affected more.
| Algorithm 2: Priority or an event message at a node for an instant t |
| 1: Read input: Time (t), Number or nodes (N(t)), position(x(t), y(t)). Type of traffic (e(t)), velocity (v(t)) |
| 2: Calculate // as shown in Equation (1) |
| 3: Calculate // as shown in Equation (2) |
| 4: Calculate // as shown in Equation (3) |
| 5: procedure PRIORITY(Impacti(t),ADi(t),AV(t)) |
| 6: Calculate Priorityi(t) // as shown in Equation (4) |
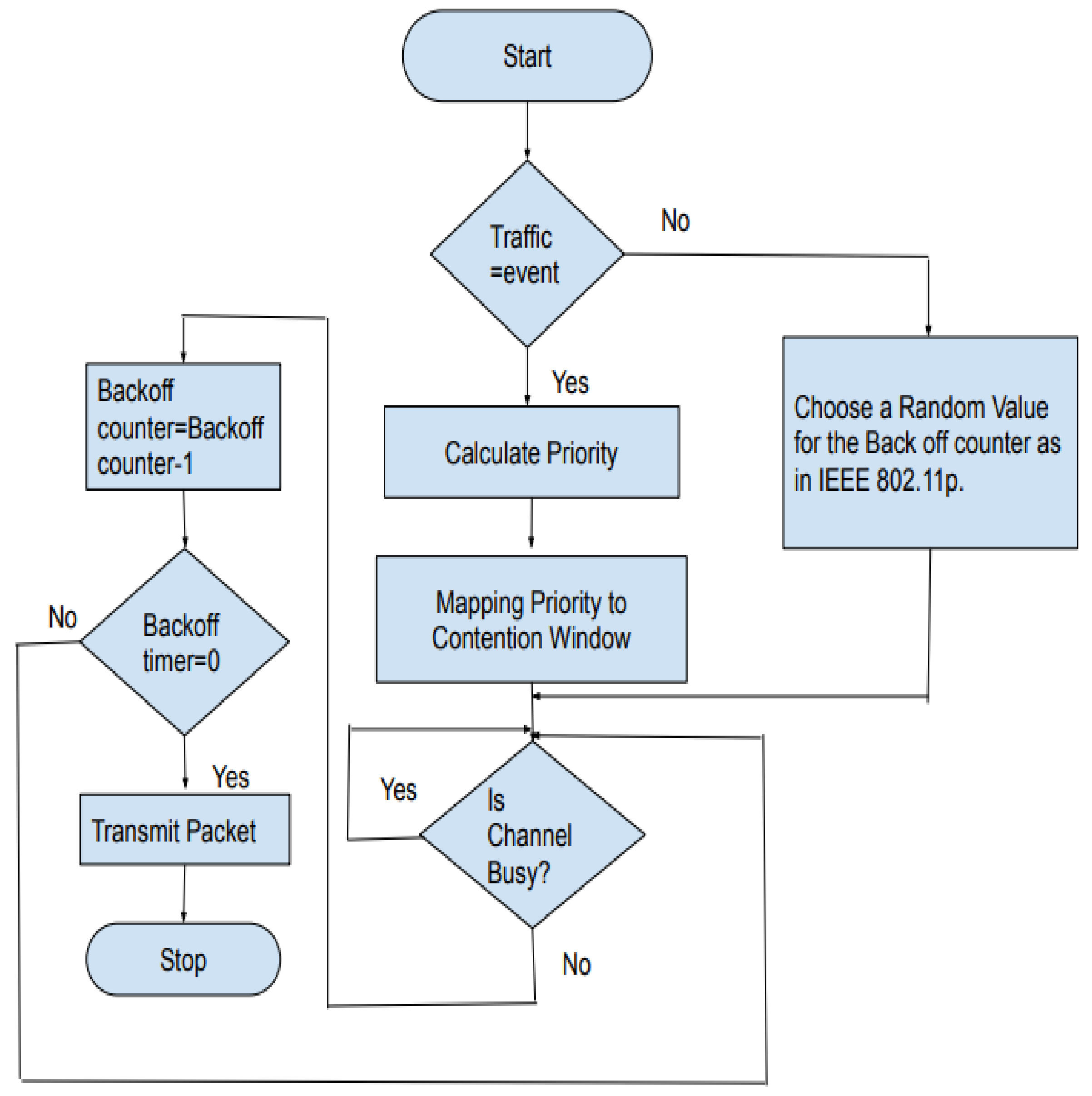
3.4. Priority Mapping to Contention Window
| Algorithm 3: This procedure calculates the Back-off value for a node |
| 1: procedure BACK·OFF(traffici(t), Priorityi(t), CWmax, CWmin) |
| 2: while traffici(t) == emergency do |
| 3: Calculate CWnewmax(t) // as shown in Equation (5) |
| 4: Back-offi(t) = Random([0,CWnewmax(t)]) |
| 5: end while |
| 6: while traffici(t) == non-emergency do |
| 7: Back-offi(t) = Random([CWmin,CWmax]) |
| 8: end while |
| 9: end procedure |
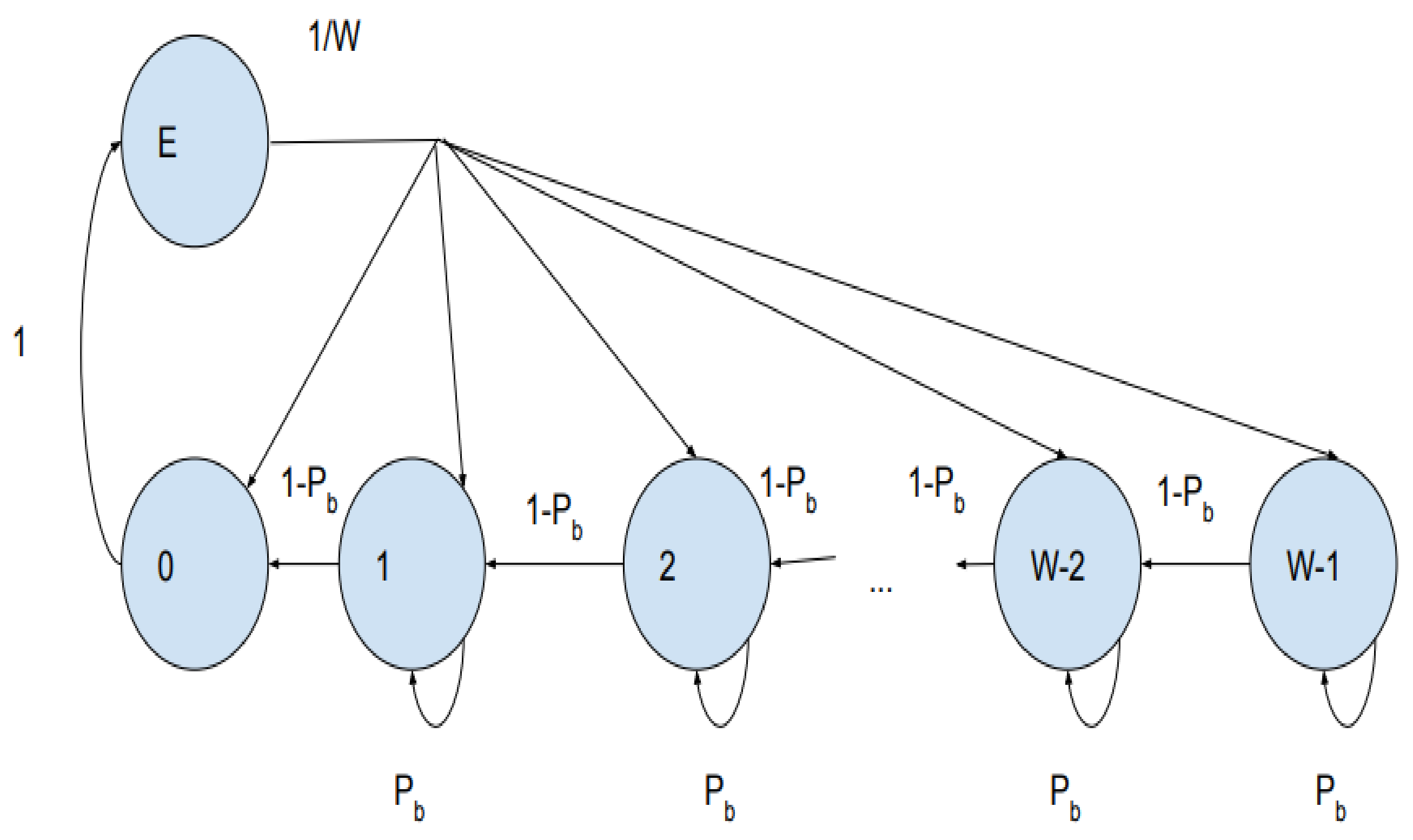
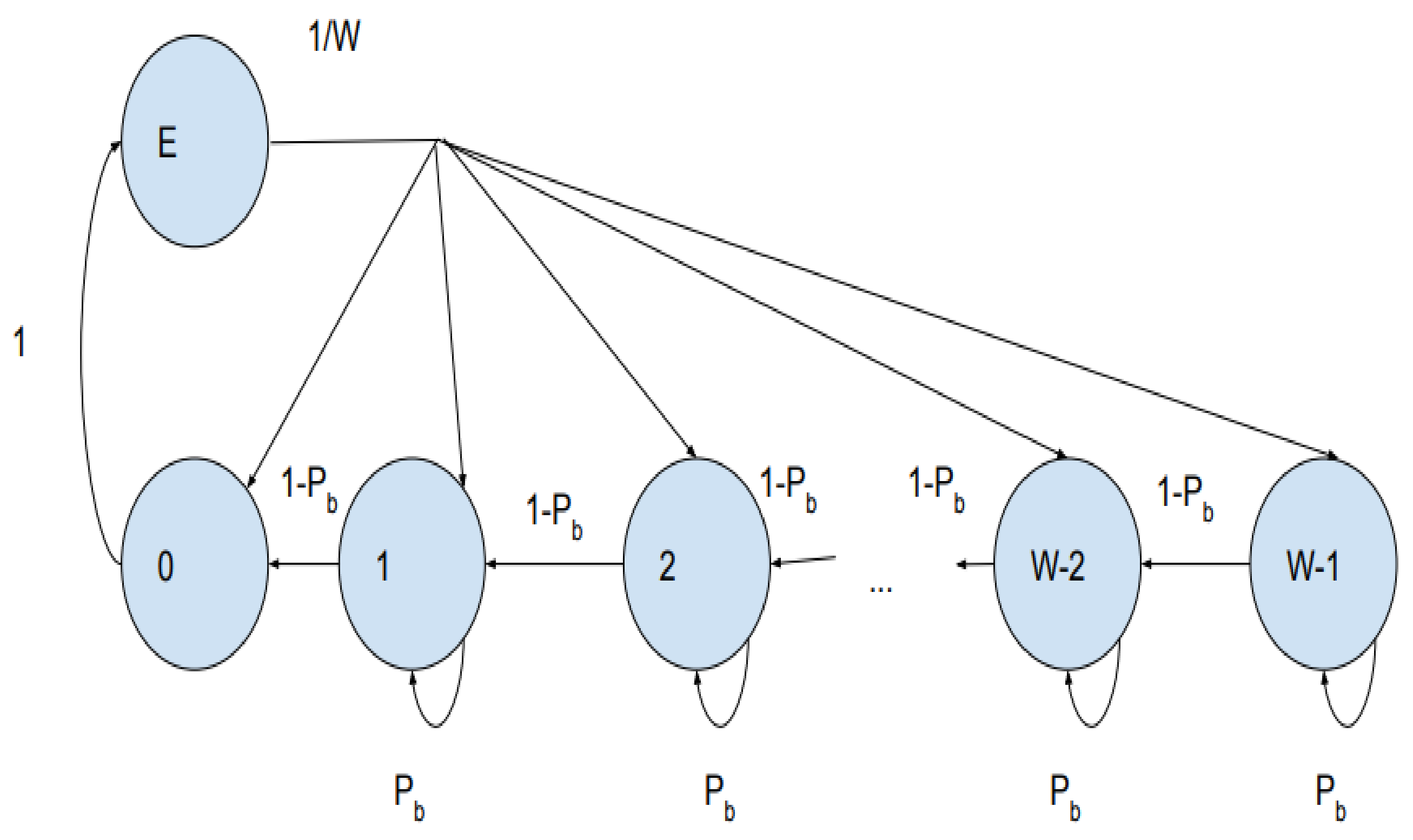
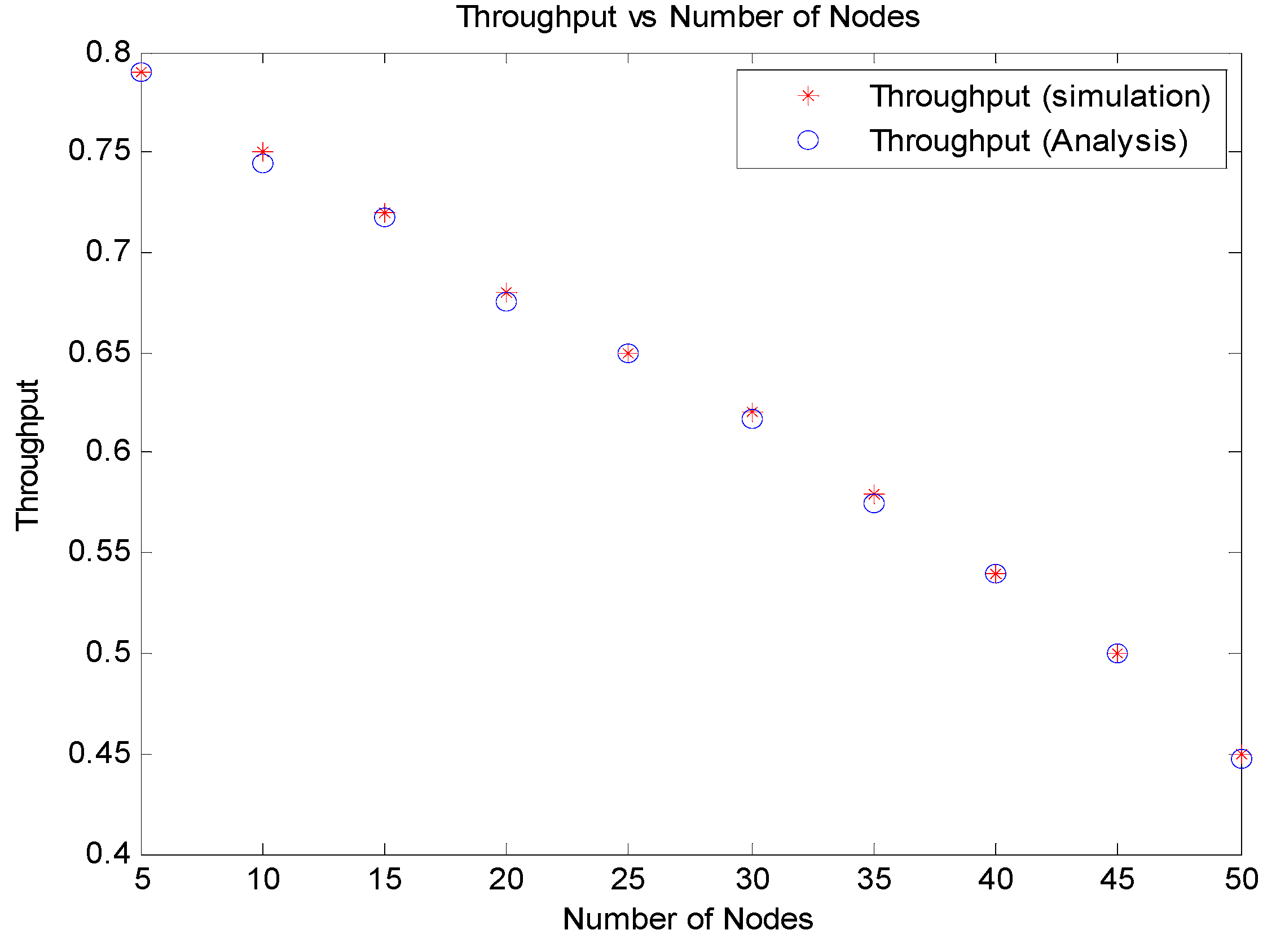
4. Mathematical Modeling
- The probability of the medium to be idle, i.e., this condition happens when no node tries to occupy the channel.
- Probability of the channel to be busy, i.e., this condition happens when at least one node in the network tries to occupy the channel.
- Probability of success, i.e., this condition happens when only one node selects the channel for transmission.
5. Results and Discussion
5.1. Simulation Environment
5.2. Communication Configuration
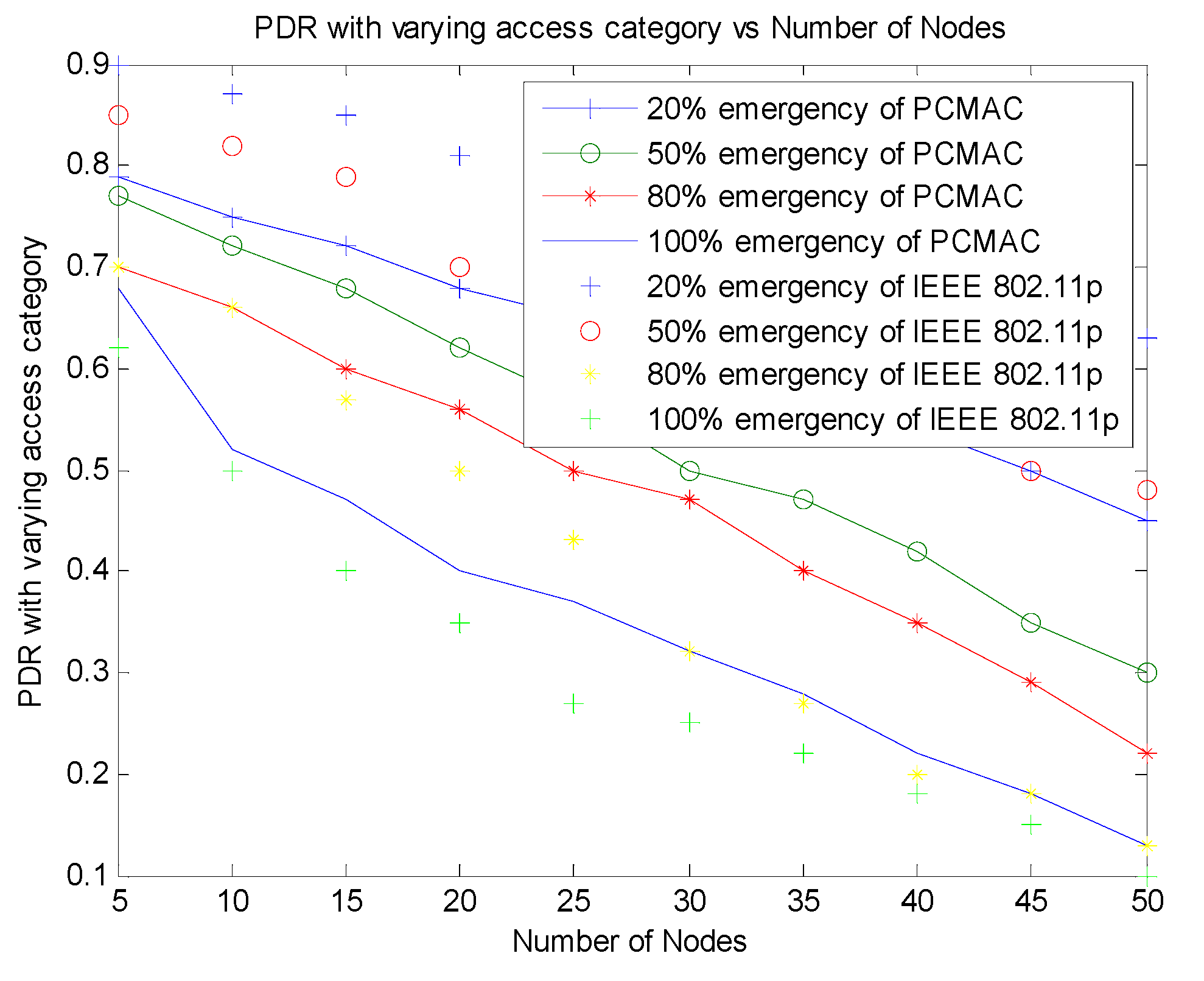
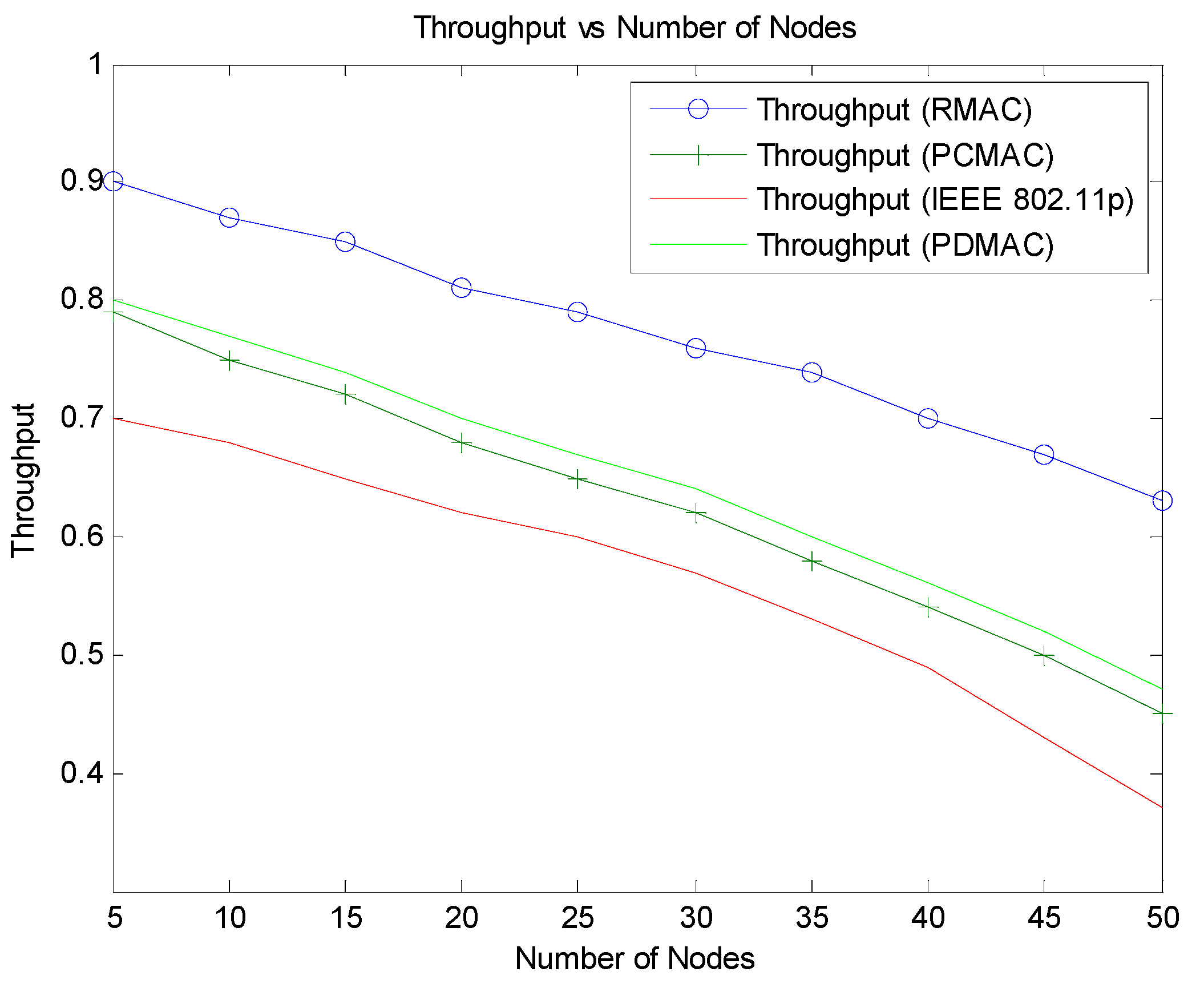
- IEEE 802.11p: Simulations are performed to compare the performance of the fixed contention window with respect to the dynamic contention window for broadcast messages.
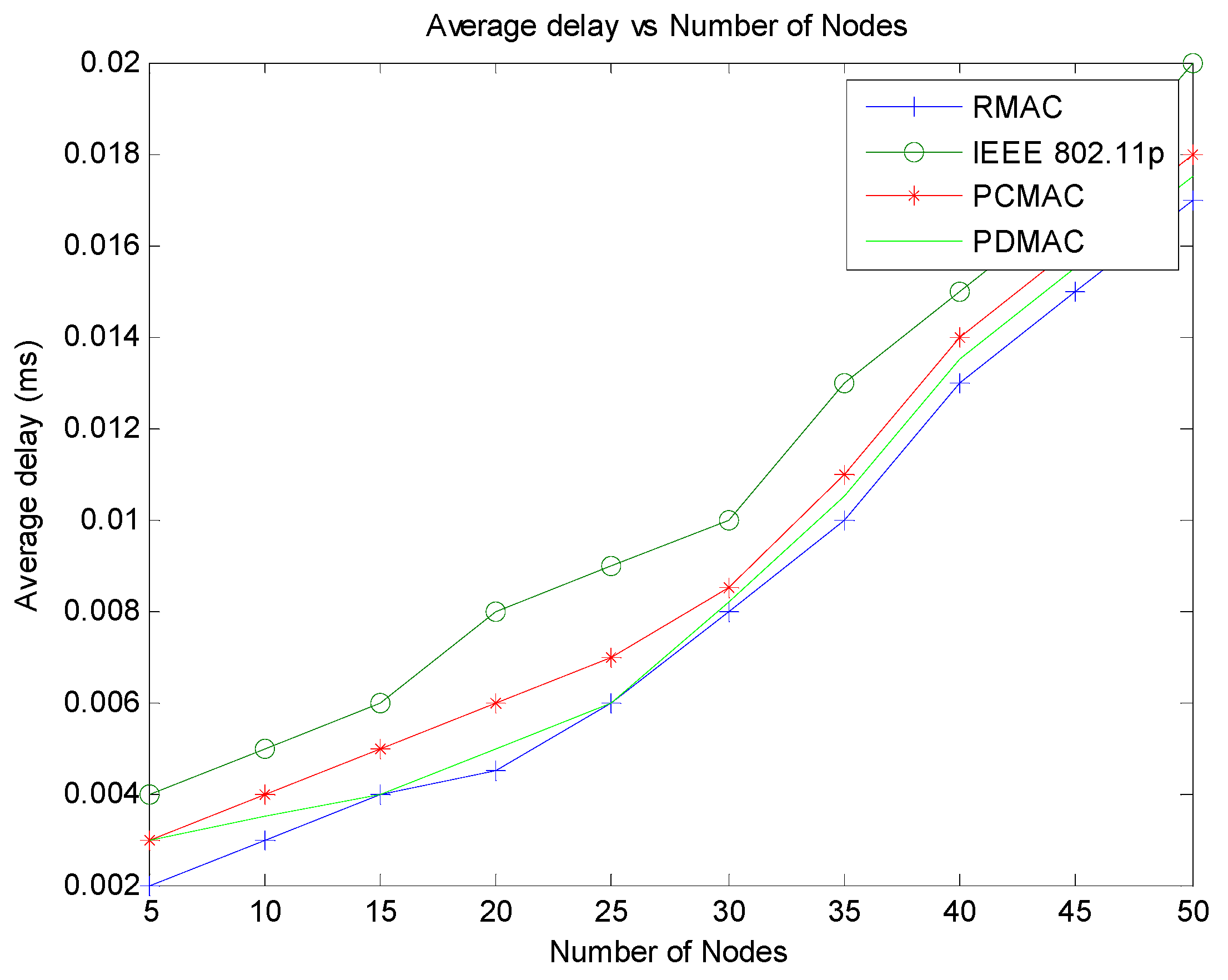
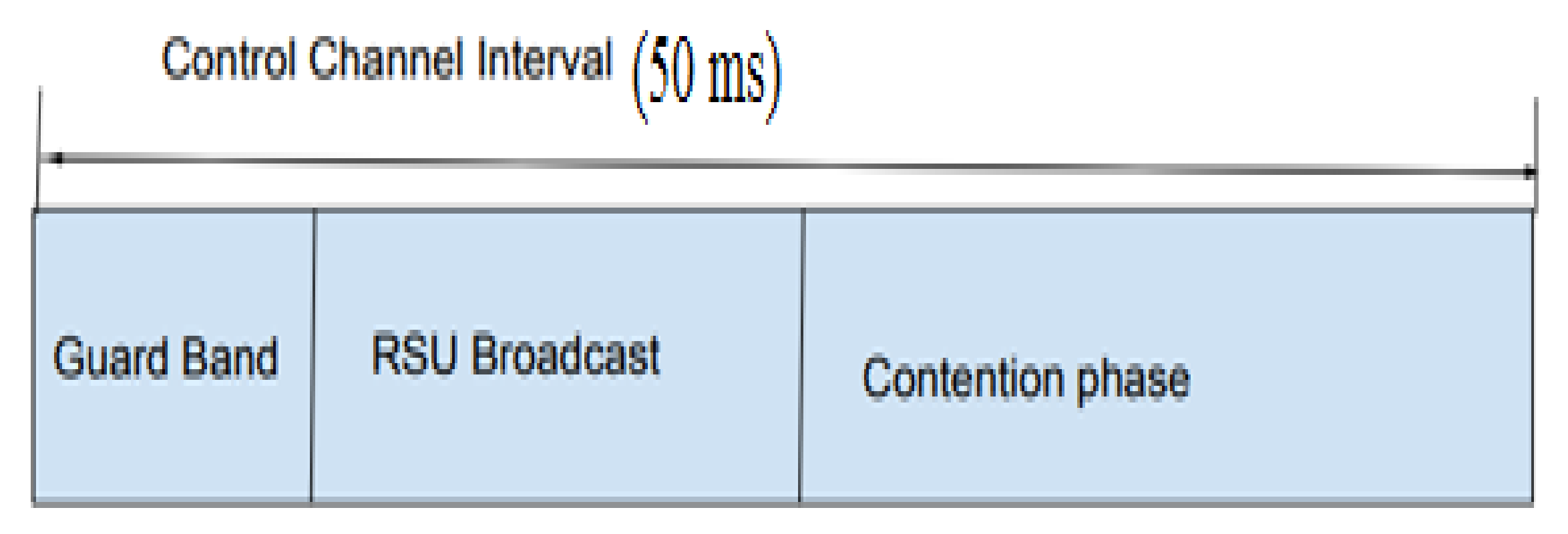
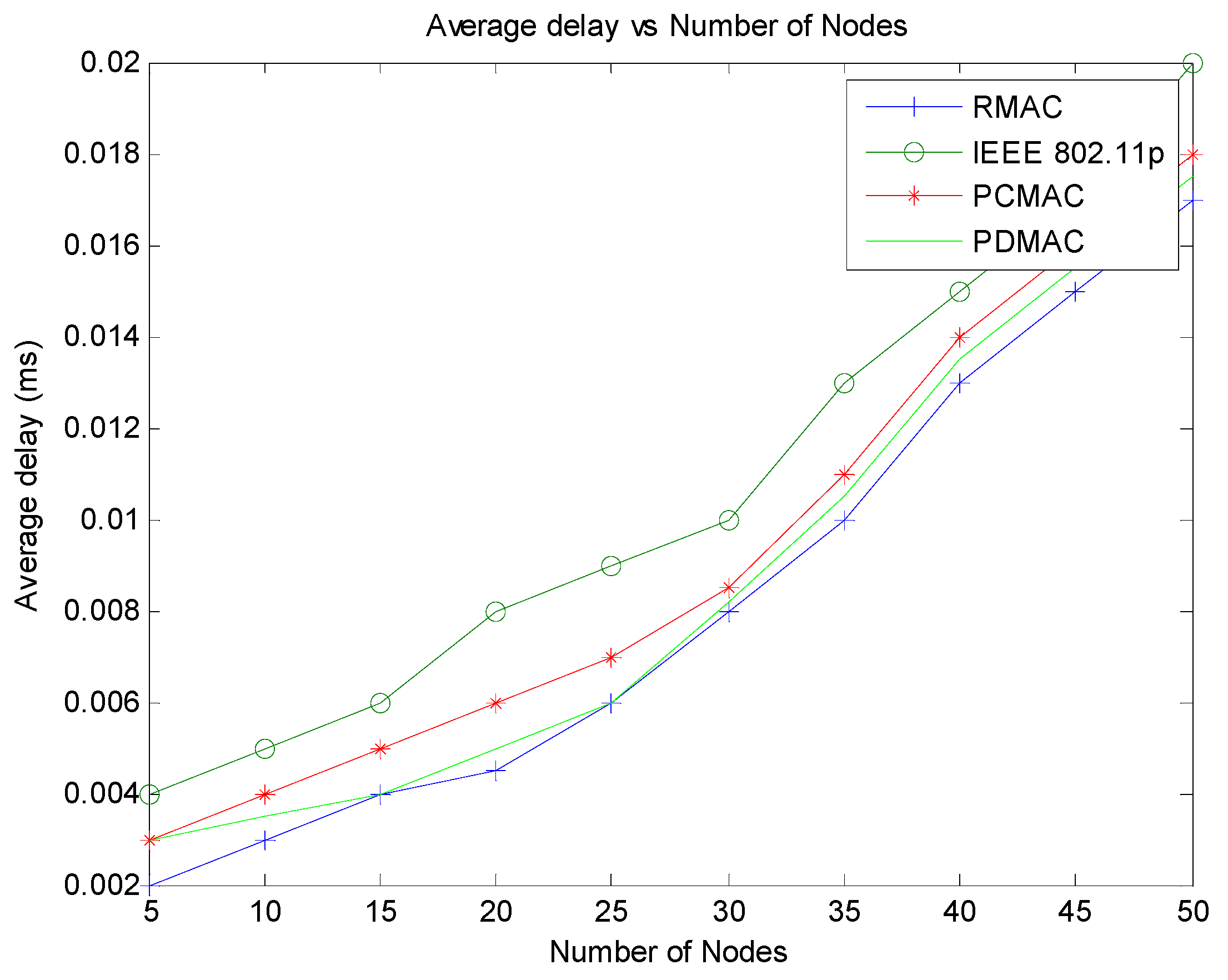
- R-MAC [27] is an adaptive MAC protocol for cooperative collision avoidance applications that consider the probability of an accident to happen. Time frame of R-MAC has three segments: the RSU broadcast, the TDMA for beacons, and the CSMA part for transmitting event messages. The number of CSMA slots depends on the probability of vehicle collisions that can happen in a platoon.
- Priority-based direction-aware MAC (PDMAC) [26] protocol is a cluster based V2V MAC with the objective of prioritizing warning message delivery in VANET. Protocol works with the TDMA approach considering the severity level, direction, and message type to prioritize the warning message. The scheme decreases the end-to-end delays and increases the network throughput.
- The following parameters are used to study the performance of the protocol.
- Delivery delay of emergency packet is the average time taken from the generation of a packet to its delivery.
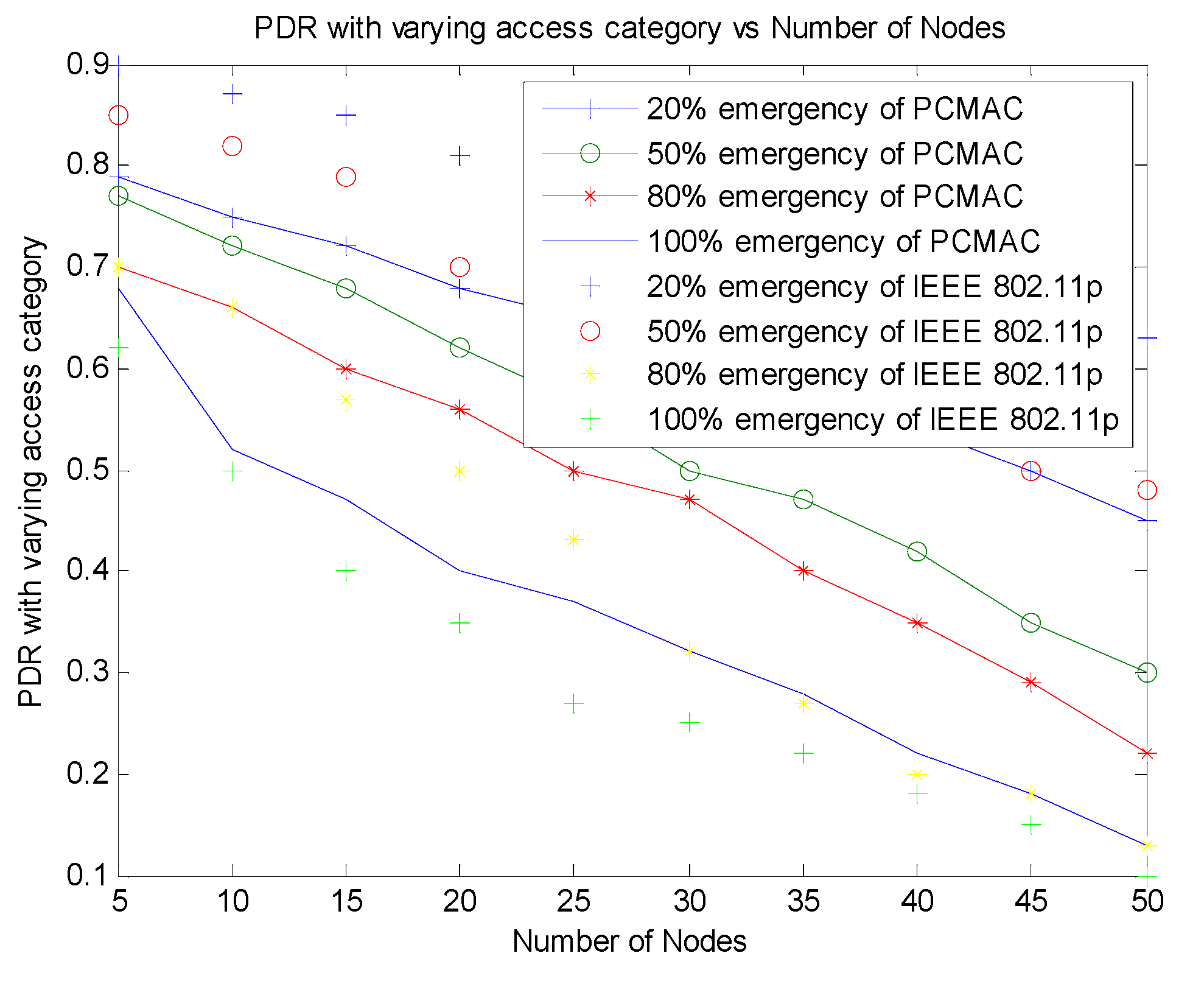
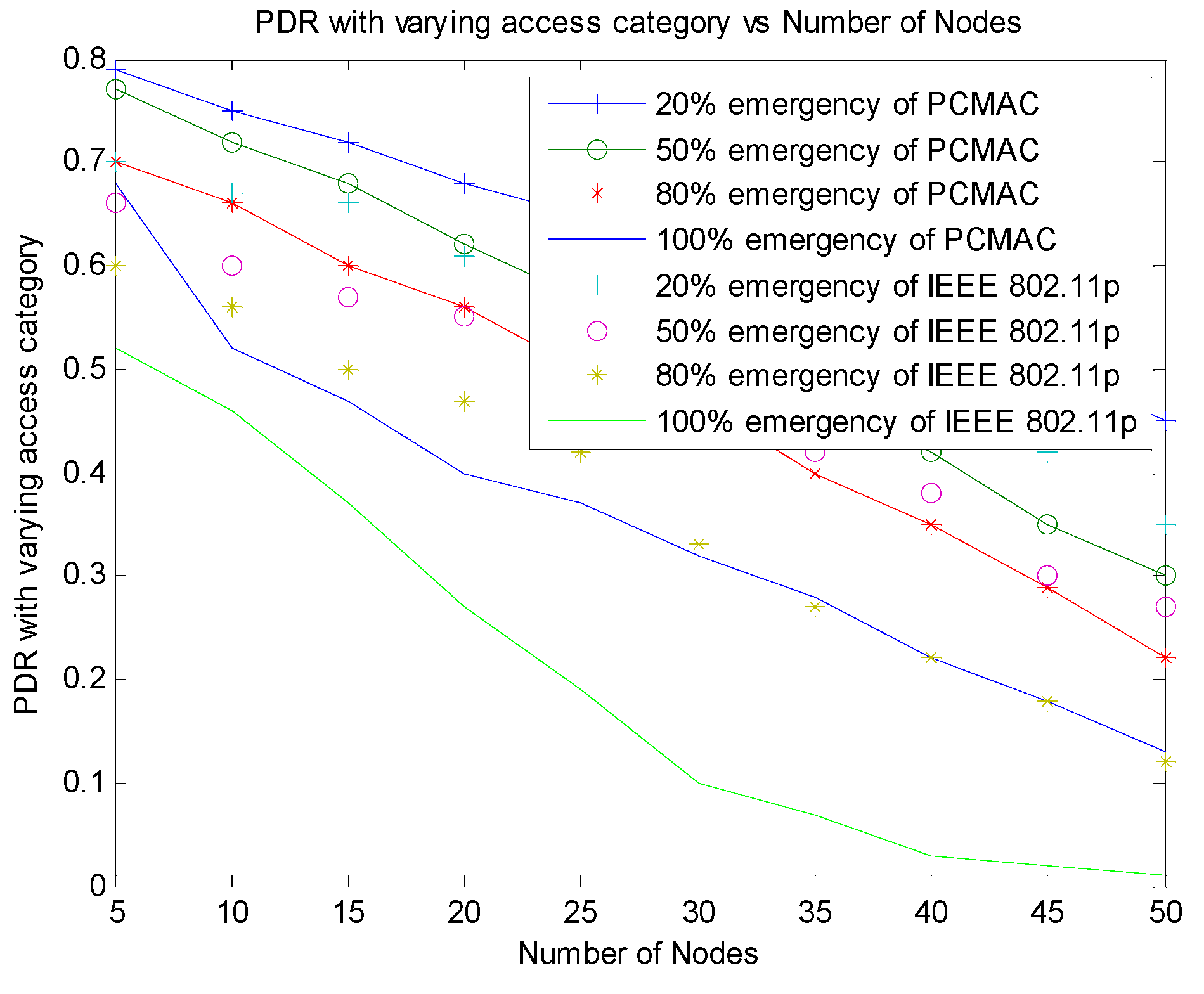
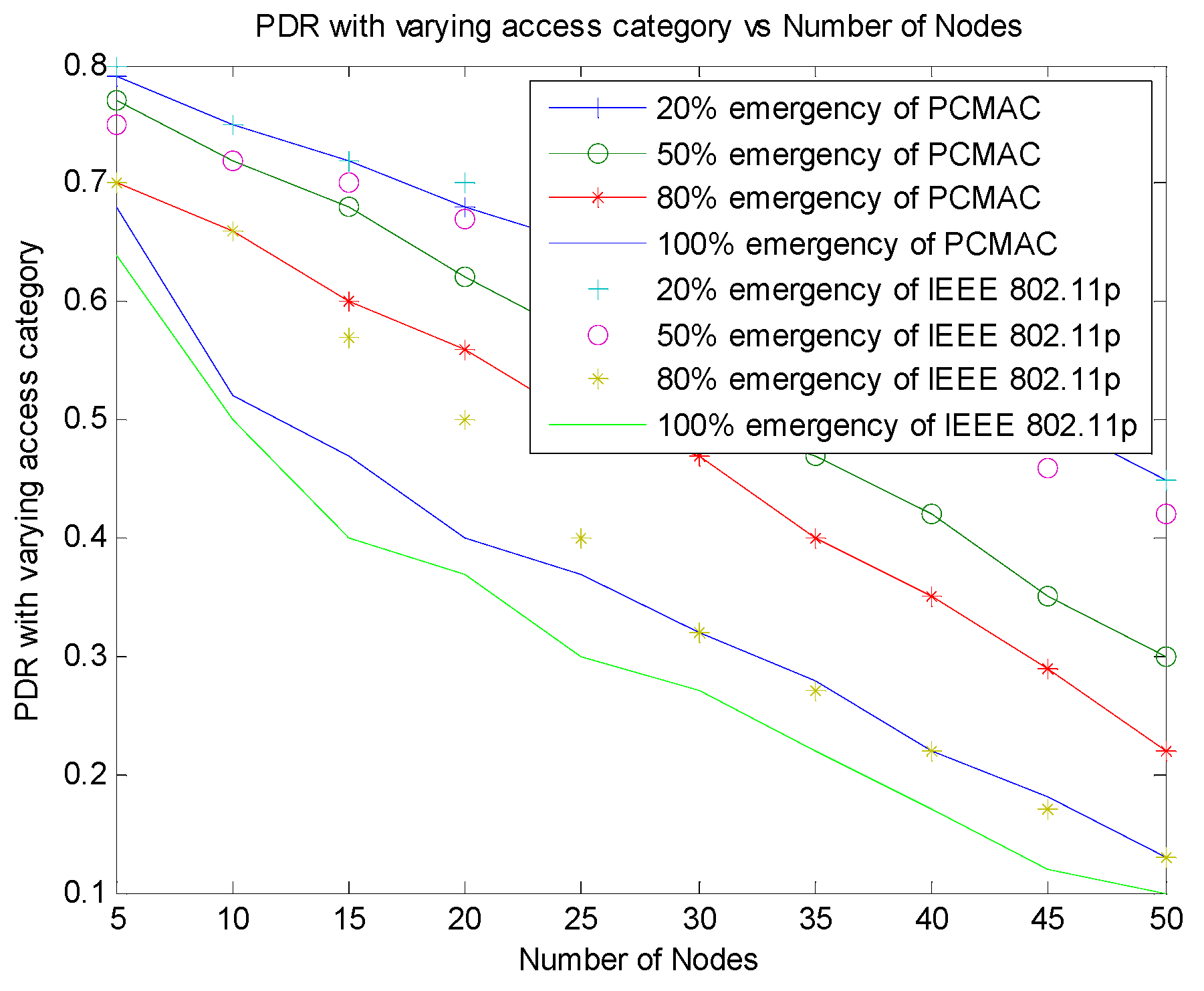
- Packet delivery ratio (PDR) is defined as a fraction of the number of packets transmitted by the total number of packets generated during simulation.
- The relevance of location and velocity with respect to the event is studied with the parameter of how many nodes are affected if an accident occurs at a node. This parameter in turn shows the risk of having an accident in the area. It talks about the importance of making the message available to the nodes behind the vehicle in the accident.
5.3. Simulation Results
- Location 0: Starting location of the zone to R/2 where R is the range of the zone
- Location 1: Between R/2 to the end of the zone.
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Ho, I.W.; Leung, K.K.; Polak, J.W.; Mangharam, R. Node connectivity in vehicular ad hoc networks with structured mobility. In Proceedings of the 32nd IEEE Conference on Local Computer Networks (LCN 2007), Dublin, Ireland, 15–18 October 2007; pp. 635–642. [Google Scholar]
- ASTM E2213-03—Standard Specification for Telecommunications and Information Exchange Between Roadside and Vehicle Systems—5 GHz Band Dedicated Short Range Communications (DSRC) Medium Access Control (MAC) and Physical Layer (PHY) Specifications. Available online: https://www.standards.its.dot.gov/Factsheets/Factsheet/66 (accessed on 14 October 2021).
- Ma, X.; Chen, X. Performance analysis of IEEE 802.11 broadcast scheme in ad hoc wireless LANs. IEEE Trans. Veh. Technol. 2008, 57, 3757–3768. [Google Scholar]
- IEEE Standard for Information Technology Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks Specific Requirements Part 11: Wireless LAN Medium Access Control (mac) and Physical Layer (phy) Specifications Amendment 6: Wireless Access in Vehicular Environments. 2010. Available online: https://ieeexplore.ieee.org/document/5514475 (accessed on 26 September 2021).
- Hamato, S.; Ariffin SH, S.; Fisal, N. Overview of wireless access in vehicular environment (WAVE) protocols and standards. Indian J. Sci. Technol. 2013, 7, 7. [Google Scholar]
- Ma, X.; Kanelopoulos, G.; Trivedi, K.S. Application-level scheme to enhance VANET event-driven multi-hop safety-related services. In Proceedings of the 2017 International Conference on Computing, Networking and Communications (ICNC), Silicon Valley, CA, USA, 26–29 January 2017; pp. 860–864. [Google Scholar]
- Patni, R.; Jain, G. Traffic congestion detection and management using VANET. Int. J. Adv. Res. Innov. Ideas Educ. 2016, 2, 1274–1280. [Google Scholar]
- Barradi, M.; Hafid, A.S.; Gallardo, J.R. Establishing strict priorities in IEEE 802.11 p WAVE vehicular networks. In Proceedings of the 2010 IEEE Global Telecommunications Conference GLOBECOM 2010, Miami, FL, USA, 6–10 December 2010; pp. 1–6. [Google Scholar]
- Liu, C.; Chung, S.; Jeong, H.; Jung, I. An enhanced message priority mechanism in IEEE 802.11 p based vehicular networks. J. Inf. Process. Syst. 2015, 11, 465–482. [Google Scholar]
- Lei, X.; Rhee, S.H. Performance analysis and enhancement of IEEE 802.11 p beaconing. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Yu, X.; Xiao, H.; Wang, S.; Li, Y. An Adaptive Back-Off Scheme Based on Improved Markov Model for Vehicular ad hoc Networks. IEEE Access 2018, 6, 67373–67384. [Google Scholar] [CrossRef]
- Bianchi, G. Performance analysis of the IEEE 802.11 distributed coordination function. IEEE J. Sel. Areas Commun. 2000, 18, 535–547. [Google Scholar] [CrossRef]
- Gannoune, L.; Robert, S.; Tomar, N.; Agarwal, T. Dynamic tuning of the maximum contention window (CWmax) for enhanced service differentiation in IEEE 802.11 wireless ad-hoc networks. In Proceedings of the IEEE 60th Vehicular Technology Conference, 2004 VTC2004-Fall, Los Angeles, CA, USA, 26–29 September 2004; Volume 4, pp. 2956–2961. [Google Scholar]
- Rawat, D.B.; Yan, G.; Popescu, D.C.; Weigle, M.C.; Olariu, S. Dynamic adaptation of joint transmission power and contention window in VANET. In Proceedings of the2009 IEEE 70th Vehicular Technology Conference Fall, Anchorage, AK, USA, 20–23 September 2009; pp. 1–5. [Google Scholar]
- Jang, H.C.; Feng, W.C. Network status detection-based dynamic adaptation of contention window in IEEE 802.11 p. In Proceedings of the 2010 IEEE 71st Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010; pp. 1–5. [Google Scholar]
- Syed, I.; Roh, B.-H. Adaptive Backoff Algorithm for Contention Window for Dense IEEE 802.11 WLANs. Mob. Inf. Syst. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Raut, T.V.; Jeyakumar, A. Self-adaptive Cw size by sliding window with dynamic persistence factor. Int. J. Recent Trends Eng. Technol. 2014, 11, 267. [Google Scholar]
- Tripti, C.; Jibukumar, M.G. An Enhanced Synchronized Multi-Channel MAC Scheme to improve Throughput in VANET. Int. J. Commun. Netw. Inf. Secur. 2020, 12, 153–161. [Google Scholar]
- Suthaputchakun, C. Priority-Based Inter-Vehicle Communication for Highway Safety Messaging Using IEEE 802.11e. Int. J. Veh. Technol. 2009, 2009, 1–12. [Google Scholar] [CrossRef]
- Harigovindan, V.P.; Babu, A.V.; Jacob, L. Ensuring fair access in IEEE 802.11 p-based vehicle-to-infrastructure networks. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Alasmary, W.; Basir, O. Achieving efficiency and fairness in 802.11-based vehicle-to-infrastructure communications. In Proceedings of the 2011 IEEE 73rd Vehicular Technology Conference (VTC Spring), Budapest, Hungary, 15–18 May 2011; pp. 1–6. [Google Scholar]
- Yang, B.; Wang, S.; Shi, X.; Han, W. QoS-assurance-and-mobility-based EDCA mechanism for vehicular network access. In Proceedings of the 2016 2nd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 14–17 October 2016; pp. 2208–2212. [Google Scholar]
- ElBatt, T.; Goel, S.K.; Holland, G.; Krishnan, H.; Parikh, J. Cooperative collision warning using dedicated short range wireless communications. In Proceedings of the 3rd International Workshop on Vehicular ad Hoc Networks, Los Angeles, CA, USA, 23–29 September 2006; pp. 1–9. [Google Scholar]
- Younes, M.B.; Boukerche, A. Safety and efficiency control protocol for highways using intelligent vehicular networks. Comput. Netw. 2019, 152, 1–11. [Google Scholar] [CrossRef]
- Yang, X.; Liu, L.; Vaidya, N.H.; Zhao, F. A vehicle-to-vehicle communication protocol for cooperative collision warning. In Proceedings of the First Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services, MOBIQUITOUS 2004, Boston, MA, USA, 26–26 August 2004; pp. 114–123. [Google Scholar]
- Abbas, G.; Abbas, Z.H.; Haider, S.; Baker, T.; Boudjit, S.; Muhammad, F. PDMAC: A priority-based enhanced TDMA protocol for warning message dissemination in VANETs. Sensors 2020, 20, 45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, W.; Huang, L.; Chen, L.; Xu, H.; Miao, C. R-MAC: Risk-Aware Dynamic MAC Protocol for Vehicular Cooperative Collision Avoidance System. Int. J. Distrib. Sens. Networks 2013, 9, 686713. [Google Scholar] [CrossRef]
- Yang, Q.; Xing, S.; Xia, W.; Shen, L. Modelling and performance analysis of dynamic contention window scheme for periodic broadcast in vehicular ad hoc networks. IET Commun. 2015, 9, 1347–1354. [Google Scholar] [CrossRef]
- Chtourou, A.; Merdrignac, P.; Shagdar, O. Context-Aware Communication for V2V Collision Avoidance Applications. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 1958–1963. [Google Scholar]
- Al-Fuqaha, A.; Mohammed, I.; Hussini, S.J.; Sorour, S. Severity-Based Prioritized Processing of Packets with Application in VANETs. IEEE Trans. Mob. Comput. 2019, 19, 484–496. [Google Scholar] [CrossRef]
- Wang, W.; Luo, T.; Hu, Y. An Adaptive Information Quantity-Based Broadcast Protocol for Safety Services in VANET. Mob. Inf. Syst. 2016, 2016, 1–12. [Google Scholar] [CrossRef]
- Haider, S.; Abbas, G.; Abbas, Z.H.; Baker, T. DABFS: A robust routing protocol for warning messages dissemination in VANETs. Comput. Commun. 2019, 147, 21–34. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
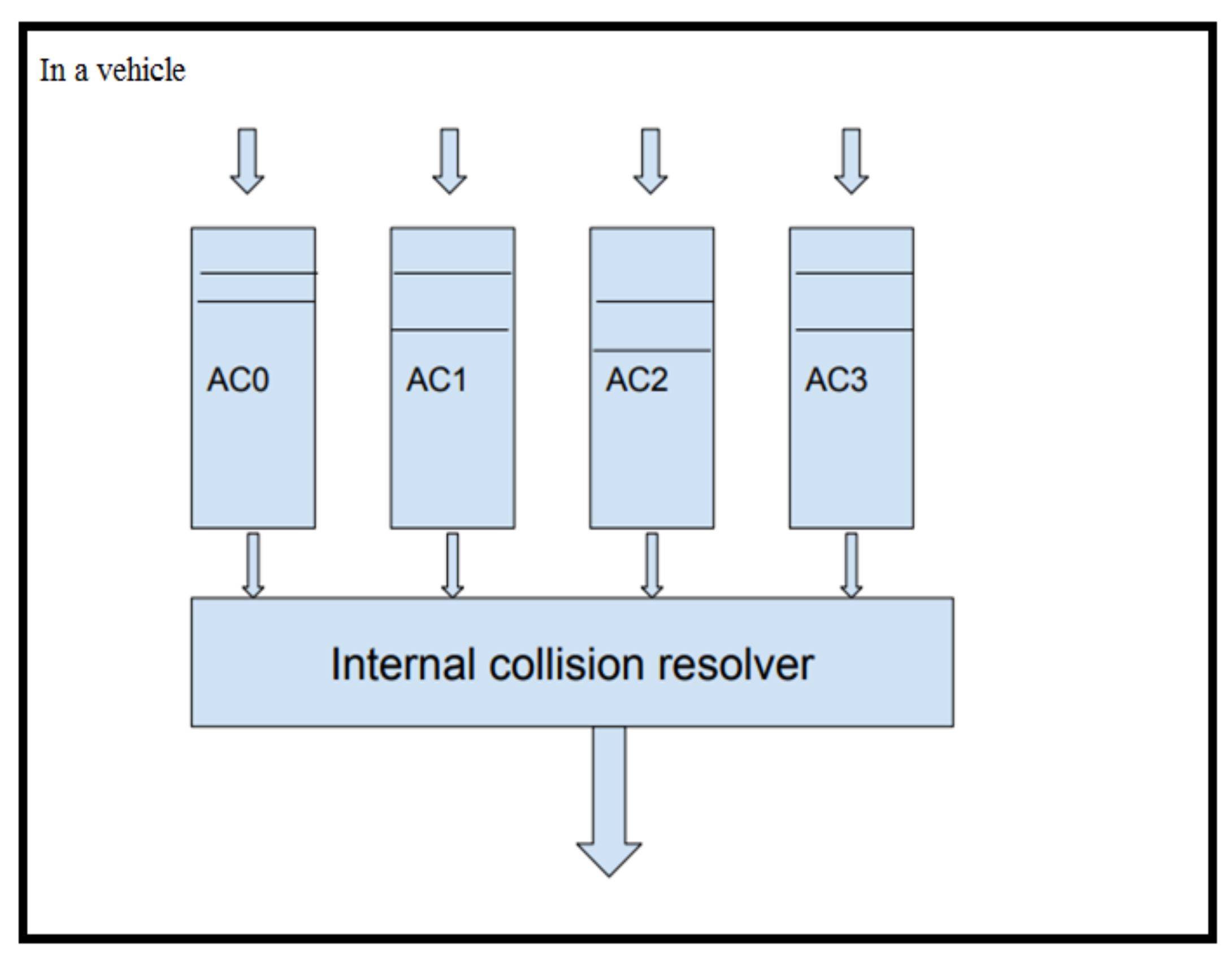
| Access Category | VO | VI | BE | BK |
|---|---|---|---|---|
| AIFSN | 2 | 3 | 6 | 9 |
| CWmin | 3 | 7 | 15 | 15 |
| CWmax | 7 | 15 | 1023 | 1023 |
| Features | Method | Purpose | Disadvantages |
|---|---|---|---|
| Based on network statistics and density | [13,14,15,16,17,18,28] Adjust the contention window based on either the node density, transmission power or transmission probability. | Improves throughput, average packet delivery delay. | The mobility of the nodes is not taken into account. The nodes may leave the range if it has a higher velocity. |
| Based on mobility of nodes | [20,21,22,25] Adjust contention window based on the impact of velocity of the node. | Fair channel access, QoS. | It considers the velocity of the node, but the node density is another parameter that has a great impact on the quality of service of an application. |
| Based on the severity level of the message | [26,27,29,30,31] Nodes calculate priority of the message based on the severity of the message. The severity of the message is calculated based on the direction, location, access type, etc. | Improving QoS considering co-operative collision warning applications. | These schemes follow a hybrid approach, including both TDMA and CSMA schemes, to provide importance for both beacon and emergency schemes. Therefore, there is a need for time synchronization. A method for time synchronization is shown in [28]. The schemes follow a clustered approach. |
| Notations | Description |
|---|---|
| T | Every instant of time |
| vi(t) | Vehicle speed of nodei at instant t |
| ei(t) | Access category of nodei at instant t |
| i,j, etc. | ID |
| (xr,yr) | Range coordinates |
| (xs(t),ys(t)) | Position coordinates of vehicle in accident |
| ds(t) | Distance to cover the range from the accident point |
| Ri | Transmission range of nodei |
| N | Number of nodes in the range |
| n0 | Cardinality of the set of low priority nodes (non-emergency) |
| n1 | Cardinality of the set of high priority nodes (emergency) |
| Pf | Probability of channel to be free |
| Pb | Probability of channel to be busy |
| Ps | Probability of transmission to be successful |
| Pc | Probability of collision |
| Impacti(t) | Importance of access category at nodei in the region at tth instant |
| ADi(t) | Average relative distance of nodes to nodei at instant t |
| AVi(t) | Average relative velocity of nodes to nodei at instant t |
| Average velocity of the platoon | |
| Priority(t) | Priority of nodei at instant t |
| Ttransmit | Time for transmitting a packet |
| CWnewmax(t) | Upper limit of contention window for nodei at instant t. This is mapped to slots for defining a backoff value for nodei at instant t. |
| Backoffi(t) | Backoff value taken by nodei for communication at instant t. This is a random value between 0 and the maximum slots defined by UpBoundi(t) of nodei at instant t |
| CWmax[i] | Maximum contention window of the access category i |
| CWmin[i] | Minimum contention window of the access category i |
| Parameter | Values |
|---|---|
| Number of vehicles | 5, 10, 15, 20, 25, 30, 35, 40, 45, 50 |
| Speed range | 10–100 km/h |
| simulation time | 1000 s |
| Communication range | 100 m |
| Emergency message size (Lp) | 100 bytes |
| Non-emergency size | 100 bytes |
| MAC header (Lh) | 50 bytes |
| DIFS | 64 µs |
| Slot value | 13 µs |
| Data rate (data_rate) | 6 Mbps |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
C, T.; M G, J. An Enhancement for IEEE 802.11p to Provision Quality of Service with Context Aware Channel Access for the Forward Collision Avoidance Application in Vehicular Ad Hoc Network. Sensors 2021, 21, 6937. https://doi.org/10.3390/s21206937
C T, M G J. An Enhancement for IEEE 802.11p to Provision Quality of Service with Context Aware Channel Access for the Forward Collision Avoidance Application in Vehicular Ad Hoc Network. Sensors. 2021; 21(20):6937. https://doi.org/10.3390/s21206937
Chicago/Turabian StyleC, Tripti, and Jibukumar M G. 2021. "An Enhancement for IEEE 802.11p to Provision Quality of Service with Context Aware Channel Access for the Forward Collision Avoidance Application in Vehicular Ad Hoc Network" Sensors 21, no. 20: 6937. https://doi.org/10.3390/s21206937
APA StyleC, T., & M G, J. (2021). An Enhancement for IEEE 802.11p to Provision Quality of Service with Context Aware Channel Access for the Forward Collision Avoidance Application in Vehicular Ad Hoc Network. Sensors, 21(20), 6937. https://doi.org/10.3390/s21206937