
Efficient Non-Uniform Pilot Design for TDCS

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. TDCS and the Classification of the Transceivers
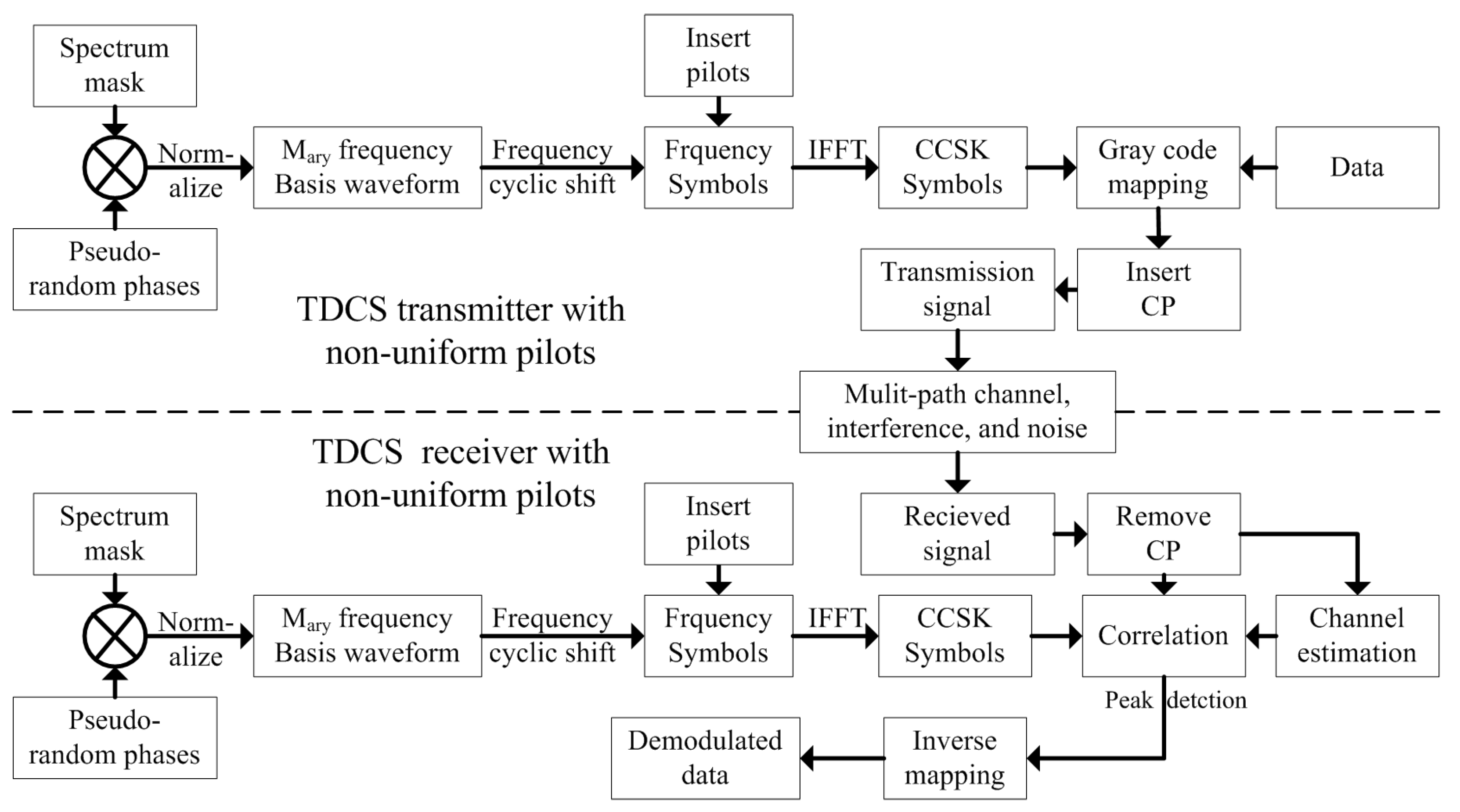
2.1. TDCS Model
2.2. The Classification of TDCS Transmitters and Receivers
- Tx 1;
- 2.
- Tx 2;
- Rx 1;
- 2.
- Rx 2;
3. Efficient Non-Uniform Pilot Design for TDCS
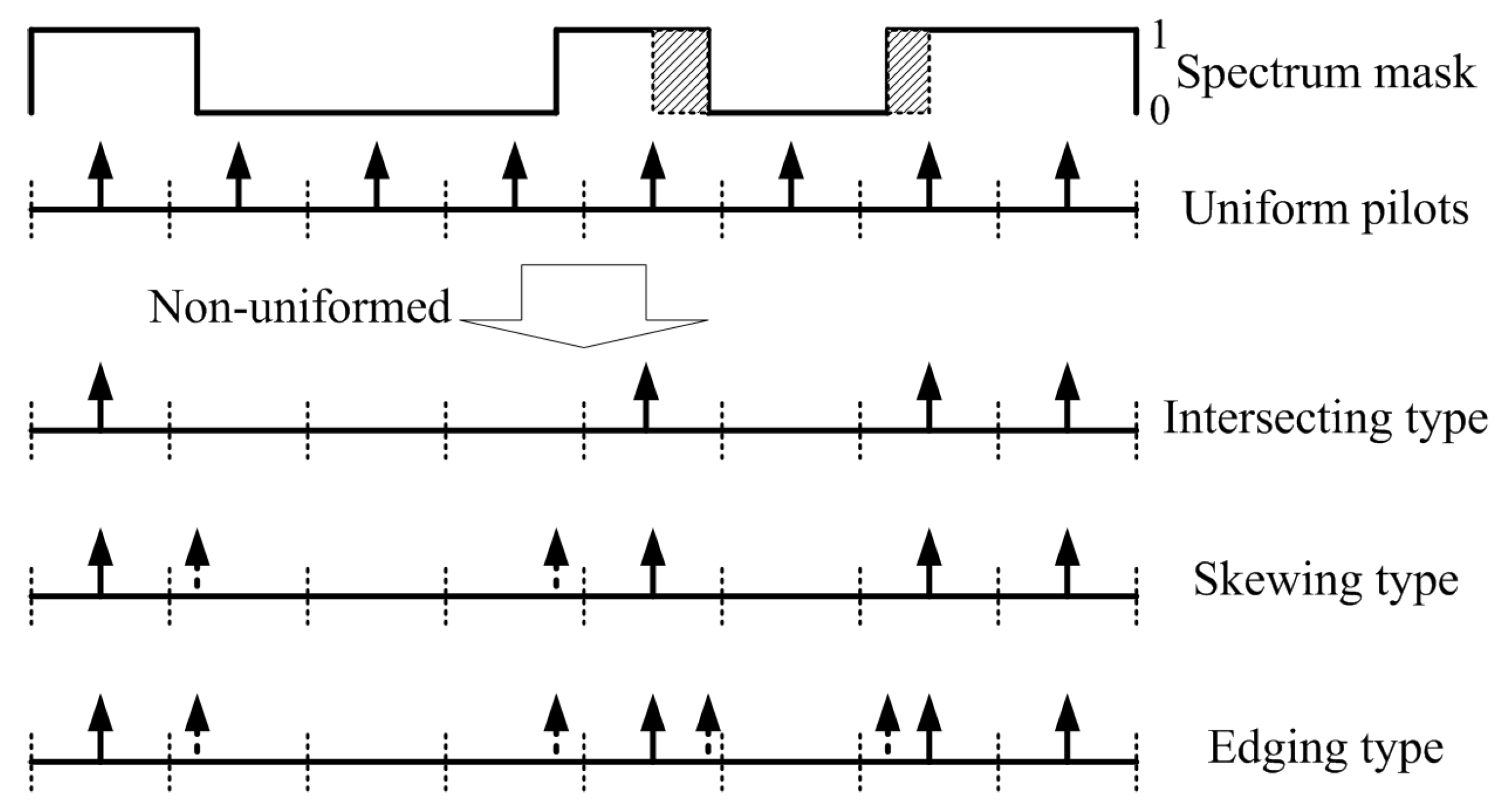
3.1. Non-Uniform Pilot Design
3.2. System Design with Non-Uniform Interpolation, Estimation, and Equalization
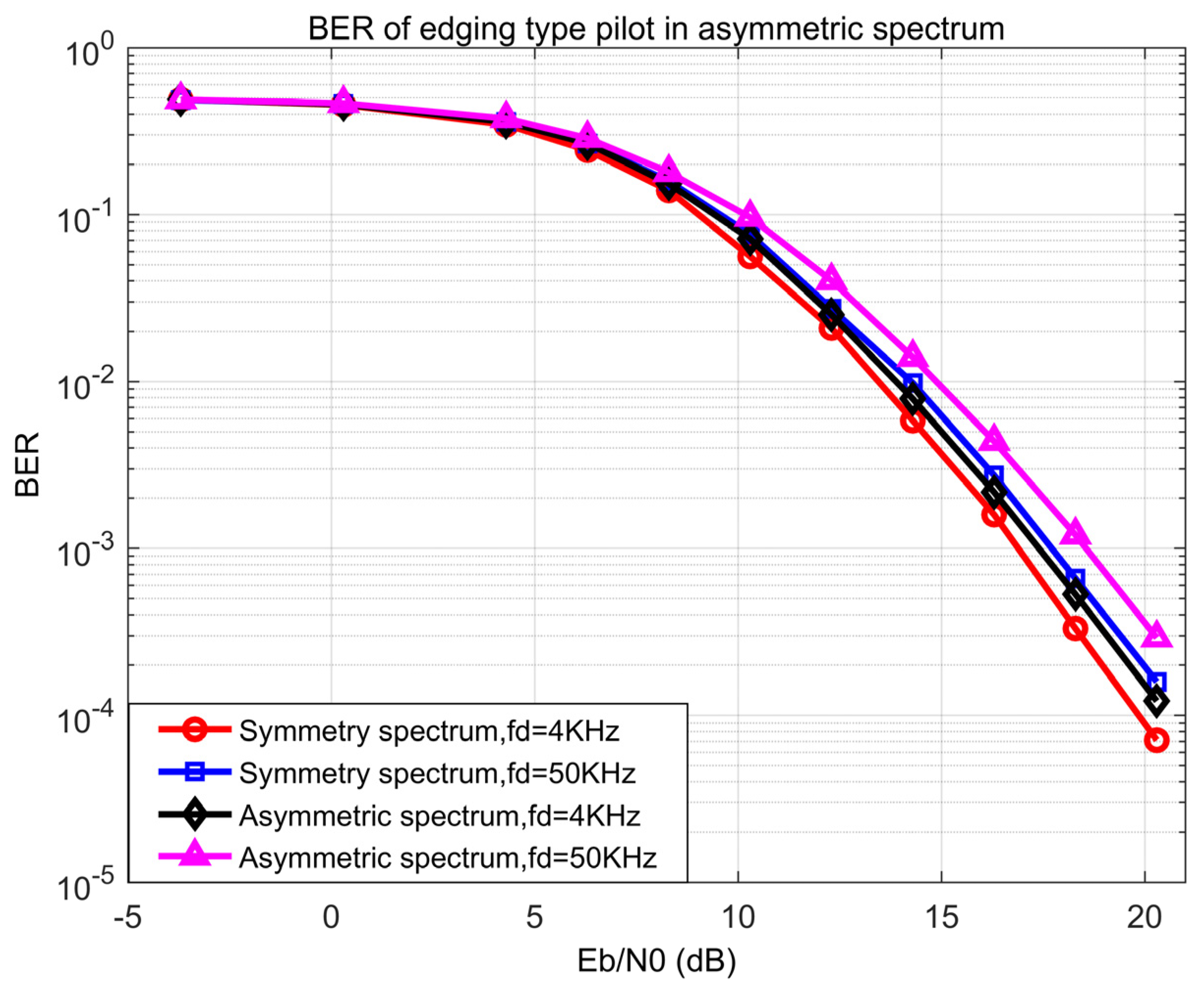
3.3. Performance Analysis
4. Numerical Simulations
5. Conclusions and Outlooks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Harinee, S.; Anand, M. Secure ECG Signal Transmission for Smart Healthcare. IJPE 2021, 17, 711–721. [Google Scholar] [CrossRef]
- Wang, M.; Lin, Y.; Tian, Q.; Si, G. Transfer Learning Promotes 6G Wireless Communications: Recent Advances and Future Challenges. IEEE Trans. Reliab. 2021, 70, 790–807. [Google Scholar] [CrossRef]
- Lin, Y.; Wang, M.; Zhou, X.; Ding, G.; Mao, S. Dynamic Spectrum Interaction of UAV Flight Formation Communication With Priority: A Deep Reinforcement Learning Approach. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 892–903. [Google Scholar] [CrossRef]
- Ansere, J.A.; Han, G.; Wang, H.; Choi, C.; Wu, C. A Reliable Energy Efficient Dynamic Spectrum Sensing for Cognitive Radio IoT Networks. IEEE Internet Things J. 2019, 6, 6748–6759. [Google Scholar] [CrossRef]
- Hou, C.; Zhang, X.; Chen, A.X. Electromagnetic Signal Feature Fusion and Recognition based on Multi-Modal Deep Learning. IJPE 2020, 16, 941–949. [Google Scholar] [CrossRef]
- Awin, F.A.; Alginahi, Y.M.; Abdel-Raheem, E.; Tepe, K. Technical issues on cognitive radio-based Internet of Things systems: A survey. IEEE Access 2019, 7, 97887–97908. [Google Scholar] [CrossRef]
- Lin, Y.; Zhao, H.; Tu, Y.; Mao, S.; Dou, Z. Threats of adversarial attacks in DNN-based modulation recognition. In IEEE INFOCOM 2020—IEEE Conference on Computer Communications; IEEE: New York, NY, USA, 2020; pp. 2469–2478. [Google Scholar] [CrossRef]
- Lin, Y.; Zhao, H.; Ma, X.; Tu, Y.; Wang, M. Adversarial Attacks in Modulation Recognition with Convolutional Neural Networks. IEEE Trans. Reliab. 2021, 70, 389–401. [Google Scholar] [CrossRef]
- Zhao, H.; Tian, Q.; Pan, L.; Lin, Y. The technology of adversarial attacks in signal recognition. Phys. Commun. 2020, 43, 101199. [Google Scholar] [CrossRef]
- Ma, S.; Hu, S.; Zhu, X.; Tang, Q.; Luo, Q.; Zhou, Y. A Hybrid Clustering Strategy for Transform Domain Communication System. IEEE Access 2019, 7, 92561–92571. [Google Scholar] [CrossRef]
- Chakravarthy, V.; Li, X.; Wu, Z.; Temple, M.A.; Garber, F.; Kannan, R.; Vasilakos, A. Novel overlay/underlay cognitive radio waveforms using SD-SMSE framework to enhance spectrum efficiency- part i: Theoretical framework and analysis in AWGN channel. IEEE Trans. Commun. 2009, 57, 3794–3804. [Google Scholar] [CrossRef]
- Chakravarthy, V.; Nunez, A.; Stephens, J.; Shaw, A.; Temple, M. TDCS, OFDM, and MC-CDMA: A brief tutorial. IEEE Commun. Mag. 2005, 43, S11–S16. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Wang, J.; Liu, L. Research on Intelligent Anti-jamming Communication with Transform Domain Communication System. In CSPS 2018: Communications, Signal Processing, and Systems; Springer: Singapore, 2019; pp. 949–955. [Google Scholar] [CrossRef]
- Yin, W.; Chen, H. Decision-Driven Time-Adaptive Spectrum Sensing in Cognitive Radio Networks. IEEE Trans. Wirel. Commun. 2020, 19, 2756–2769. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, F.; Du, R.; Sun, Z. Pilot and data power allocation for spatially correlated massive MIMO systems with imperfect CSI. Phys. Commun. 2021, 48, 101432. [Google Scholar] [CrossRef]
- Majumder, M.; Jagannatham, A.K. Optimal Pilot Design and Error Rate Analysis of Block Transmission Systems in the Presence of Channel State Information (CSI) Estimation Error. IEEE Access 2020, 8, 112130–112144. [Google Scholar] [CrossRef]
- Lim, J.-T.; Lee, K.; Han, Y. Secure Communication With Outdated Channel State Information via Untrusted Relay Capable of Energy Harvesting. IEEE Trans. Veh. Technol. 2020, 69, 11323–11337. [Google Scholar] [CrossRef]
- Acar, Y.; Aldırmaz-Çolak, S. A new spectrally efficient pilot scheme for OFDM systems. AEU-Int. J. Electron. Commun. 2021, 129, 153566. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y.; Chen, Y.; Xia, J.; Zhang, X.; Lu, W.; Li, F. A Multichannel Cognitive Radio System Design and Its Performance Optimization. IEEE Access 2018, 6, 12327–12335. [Google Scholar] [CrossRef]
- Sanker, P.P.; Narayanan, B.P.J.; Kaliappan, M. Spectrum shaping using NC-OFDM for cognitive radio applications. IET Commun. 2020, 14, 1120–1128. [Google Scholar] [CrossRef]
- Liu, C.-J.; Huang, P.; Xiao, L. NCCC: NC-OFDM-based control channel establishment in cognitive radio networks using subcarrier pulses. Wirel. Networks 2019, 26, 2567–2583. [Google Scholar] [CrossRef]
- Dillard, G.; Reuter, M.; Zeiddler, J.; Zeidler, B. Cyclic code shift keying: A low probability of intercept communication technique. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 786–798. [Google Scholar] [CrossRef] [Green Version]
- Hassan, A.Y. A Novel Structure of High Speed OFDM Receiver to Overcome ISI and ICI in Rayleigh Fading Channel. Wirel. Pers. Commun. 2017, 97, 4305–4325. [Google Scholar] [CrossRef]
- Matin, S.A.; Milstein, L.B. OFDM System Performance, Variability and Optimality with Design Imperfections and Channel Impediments. IEEE Trans. Veh. Technol. 2021, 70, 381–397. [Google Scholar] [CrossRef]
- Liu, X.; Zheng, K.; Fu, L.; Liu, X.-Y.; Wang, X.; Dai, G. Energy Efficiency of Secure Cognitive Radio Networks with Cooperative Spectrum Sharing. IEEE Trans. Mob. Comput. 2019, 18, 305–318. [Google Scholar] [CrossRef]
- Lu, Y.; Duel-Hallen, A. Channel-aware spectrum sensing and access for mobile cognitive radio ad hoc networks. IEEE Trans. Veh. Technol. 2015, 65, 2471–2480. [Google Scholar] [CrossRef]
- Chatzikokolakis, K.; Spapis, P.; Kaloxylos, A.; Alonistioti, N. Toward spectrum sharing: Opportunities and technical enablers. IEEE Commun. Mag. 2015, 53, 26–33. [Google Scholar] [CrossRef]
- Zhang, L.; Ijaz, A.; Xiao, P.; Tafazolli, R. Channel Equalization and Interference Analysis for Uplink Narrowband Internet of Things (NB-IoT). IEEE Commun. Lett. 2017, 21, 2206–2209. [Google Scholar] [CrossRef] [Green Version]
- Bai, Q.; Wang, J.; Zhang, Y.; Song, J. Deep Learning-Based Channel Estimation Algorithm Over Time Selective Fading Channels. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 125–134. [Google Scholar] [CrossRef] [Green Version]
- Kong, D.; Liu, P.; Fu, Y.; Ding, J.; Quek, T.Q.S. Reduction of Cyclic Prefix Overhead in Narrow-Band Internet of Things (NB-IoT) Systems. IEEE Wirel. Commun. Lett. 2021, 10, 517–521. [Google Scholar] [CrossRef]
- Shu, F.; Wang, J.; Li, J.; Chen, R.; Chen, W. Pilot Optimization, Channel Estimation, and Optimal Detection for Full-Duplex OFDM Systems With IQ Imbalances. IEEE Trans. Veh. Technol. 2017, 66, 6993–7009. [Google Scholar] [CrossRef]
- Kundu, N.K.; McKay, M.R. Channel Estimation for Reconfigurable Intelligent Surface Aided MISO Communications: From LMMSE to Deep Learning Solutions. IEEE Open J. Commun. Soc. 2021, 2, 471–487. [Google Scholar] [CrossRef]
- Chang, C.; Huan, H.; Xu, J.; Tao, R. Multidimensional parallel combinatory transform domain communication system. Int. J. Commun. Syst. 2017, 30, e3249. [Google Scholar] [CrossRef]
- Liu, A.; Lau, V.K.N.; Kananian, B. Stochastic Successive Convex Approximation for Non-Convex Constrained Stochastic Optimization. IEEE Trans. Signal Process. 2019, 67, 4189–4203. [Google Scholar] [CrossRef] [Green Version]
- Ma, S.; Wang, G.; Fan, R.; Tellambura, C. Blind Channel Estimation for Ambient Backscatter Communication Systems. IEEE Commun. Lett. 2018, 22, 1296–1299. [Google Scholar] [CrossRef]
- Wang, C.-X.; Bian, J.; Sun, J.; Zhang, W.; Zhang, M. A Survey of 5G Channel Measurements and Models. IEEE Commun. Surv. Tutorials 2018, 20, 3142–3168. [Google Scholar] [CrossRef]
- Han, X.; Wu, H.; Yang, Q.; Shang, J. Reverse channel selection under remanufacturing risks: Balancing profitability and robustness. Int. J. Prod. Econ. 2016, 182, 63–72. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, C.; Feng, L.; Zhou, H.; Zhao, Z.; Gu, X. Efficient Non-Uniform Pilot Design for TDCS. Sensors 2021, 21, 6880. https://doi.org/10.3390/s21206880
Chang C, Feng L, Zhou H, Zhao Z, Gu X. Efficient Non-Uniform Pilot Design for TDCS. Sensors. 2021; 21(20):6880. https://doi.org/10.3390/s21206880
Chicago/Turabian StyleChang, Cheng, Lina Feng, Hui Zhou, Zilong Zhao, and Xin Gu. 2021. "Efficient Non-Uniform Pilot Design for TDCS" Sensors 21, no. 20: 6880. https://doi.org/10.3390/s21206880
APA StyleChang, C., Feng, L., Zhou, H., Zhao, Z., & Gu, X. (2021). Efficient Non-Uniform Pilot Design for TDCS. Sensors, 21(20), 6880. https://doi.org/10.3390/s21206880