
A Propagation Study of LoRa P2P Links for IoT Applications: The Case of Near-Surface Measurements over Semitropical Rivers

 , , ,
, , ,  , , and
, , and
Abstract
:1. Introduction
- ◦
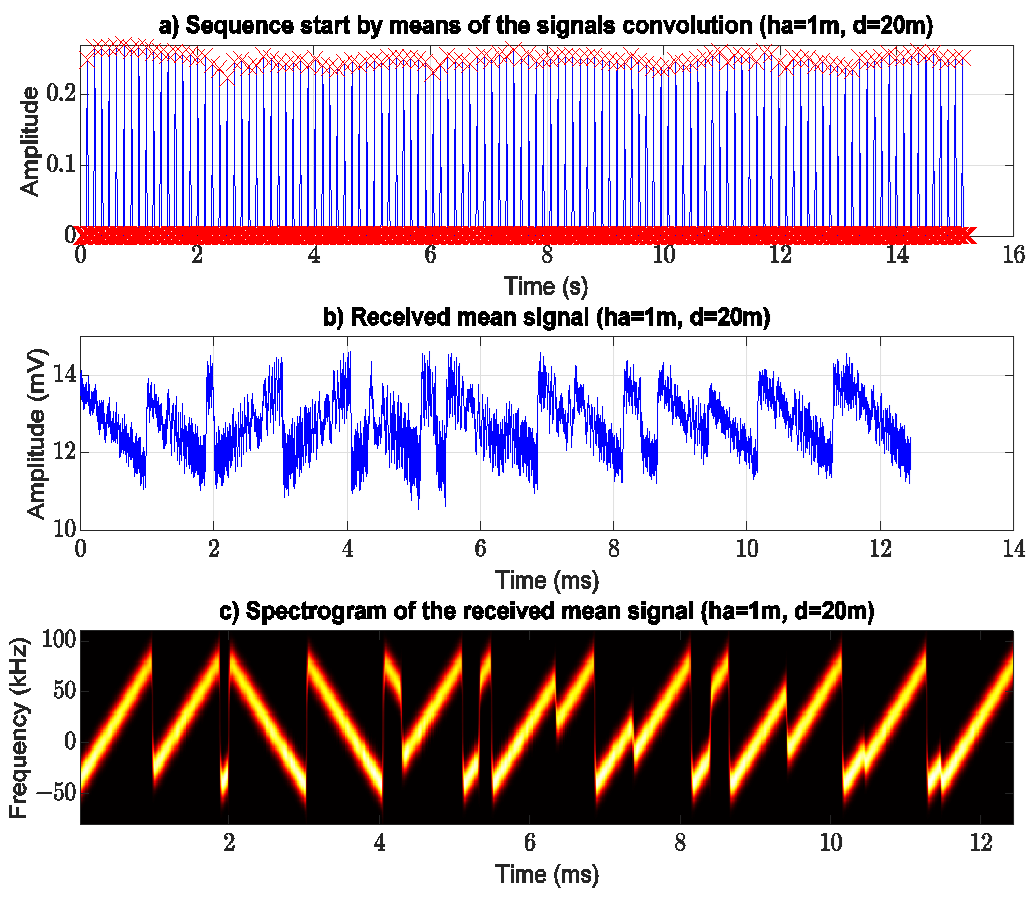
- The development of an algorithm to obtain the radio-frequency (RF) power of the received chirp signals from a LoRa ED.
- ◦
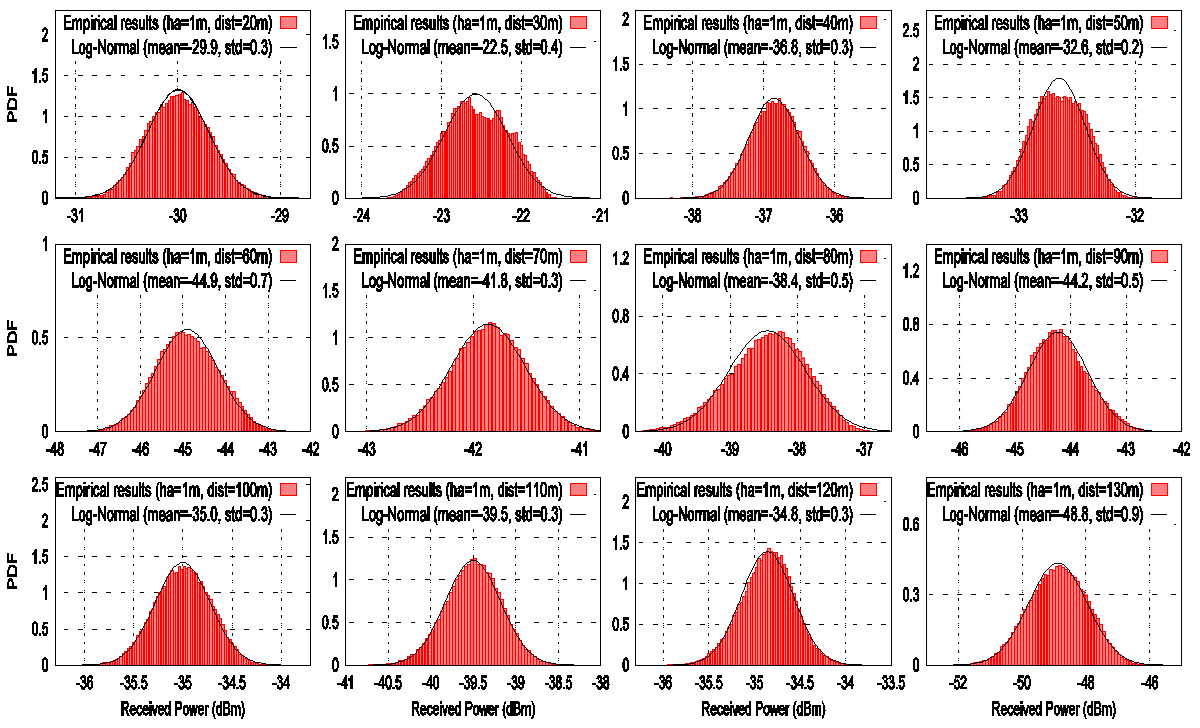
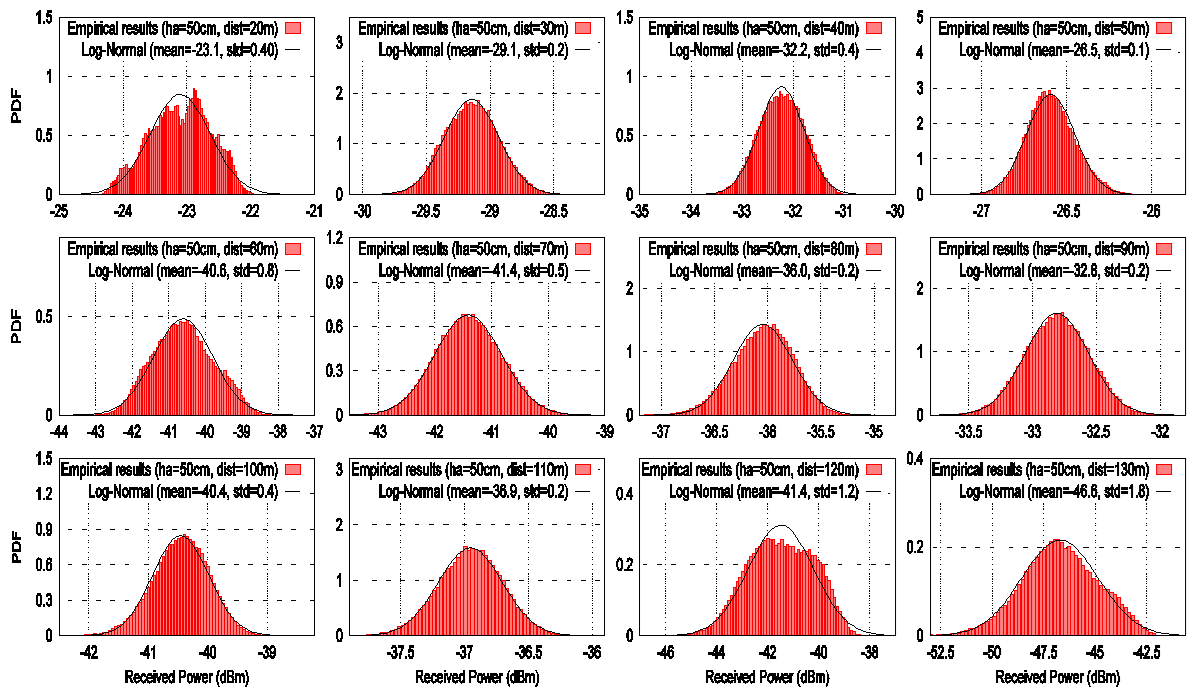
- Estimation of the empirical distribution of the chirp signal propagation over water within vegetation. We demonstrate that the signal propagation over water exhibits a log normal distribution.
- ◦
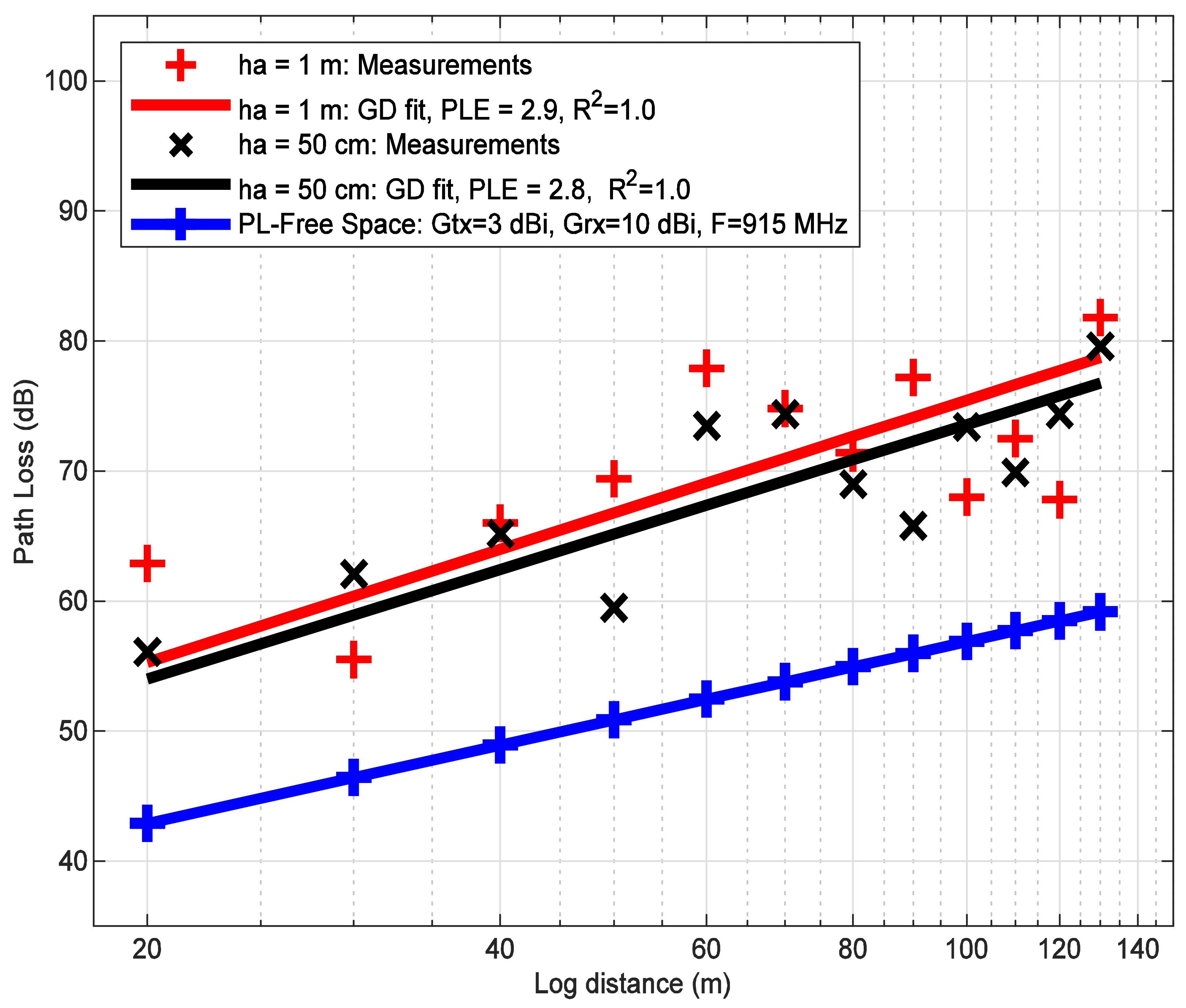
- Two experimental path loss models derived from samples taken in a real environment at Colima, Mexico. These models consider the received chirps of RF power and the shadowing effect.
- ◦
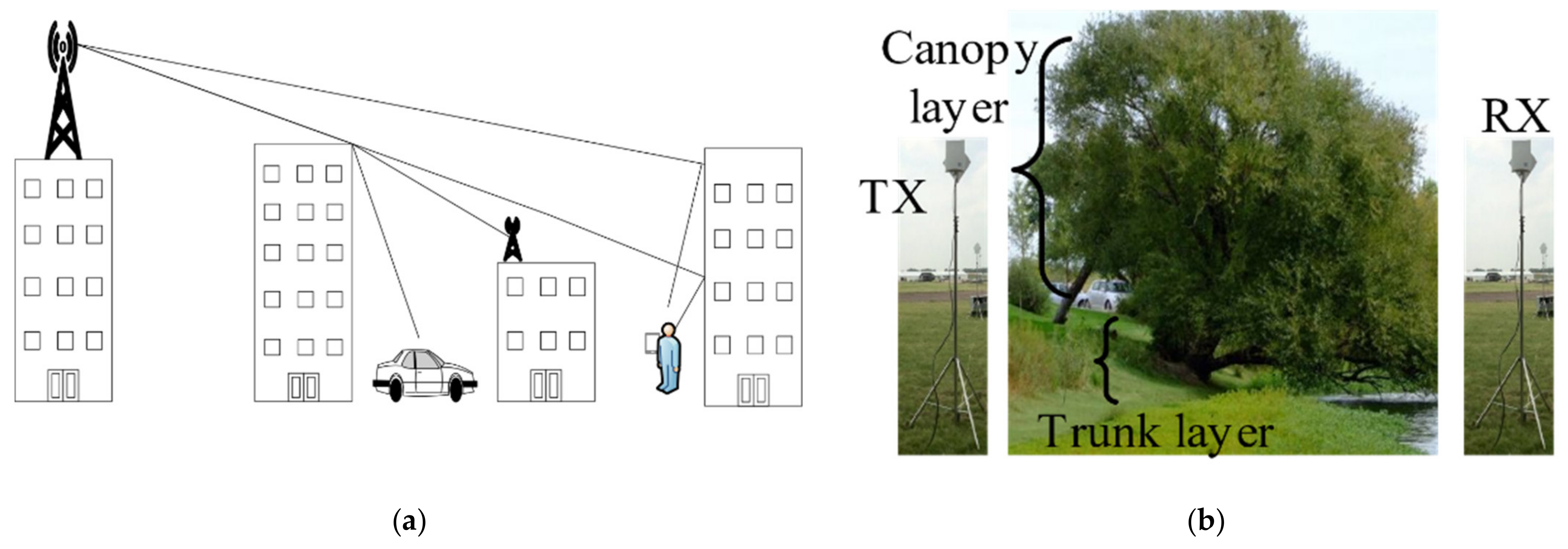
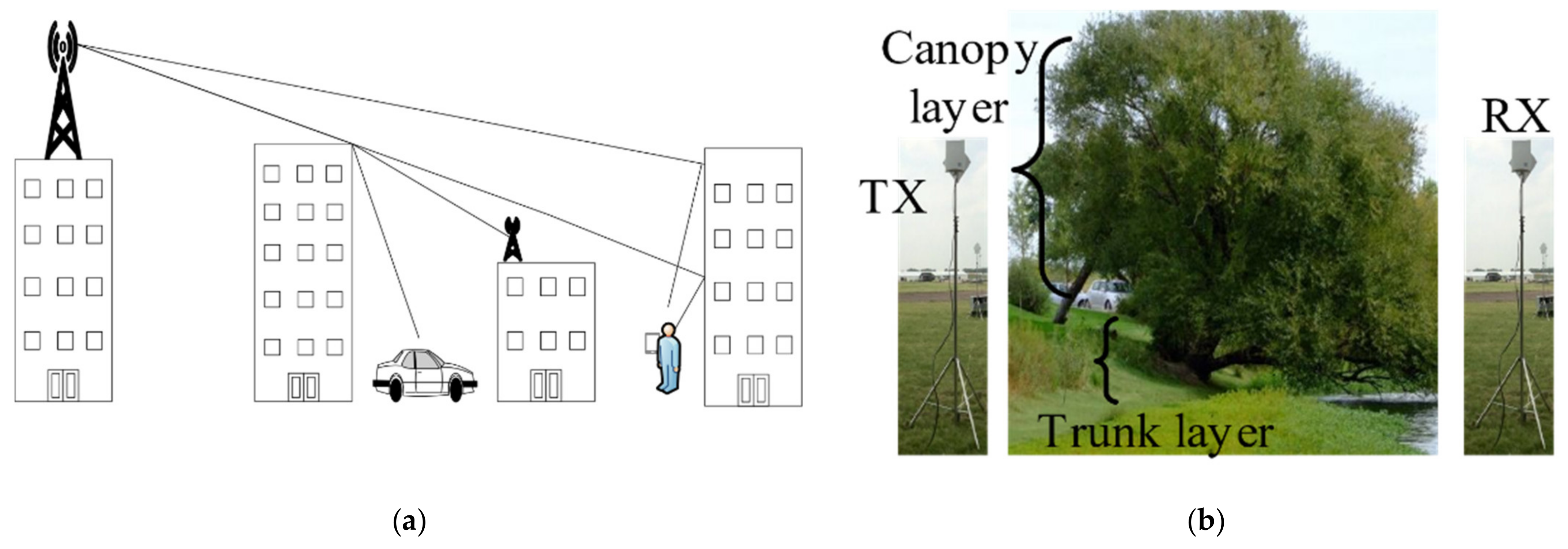
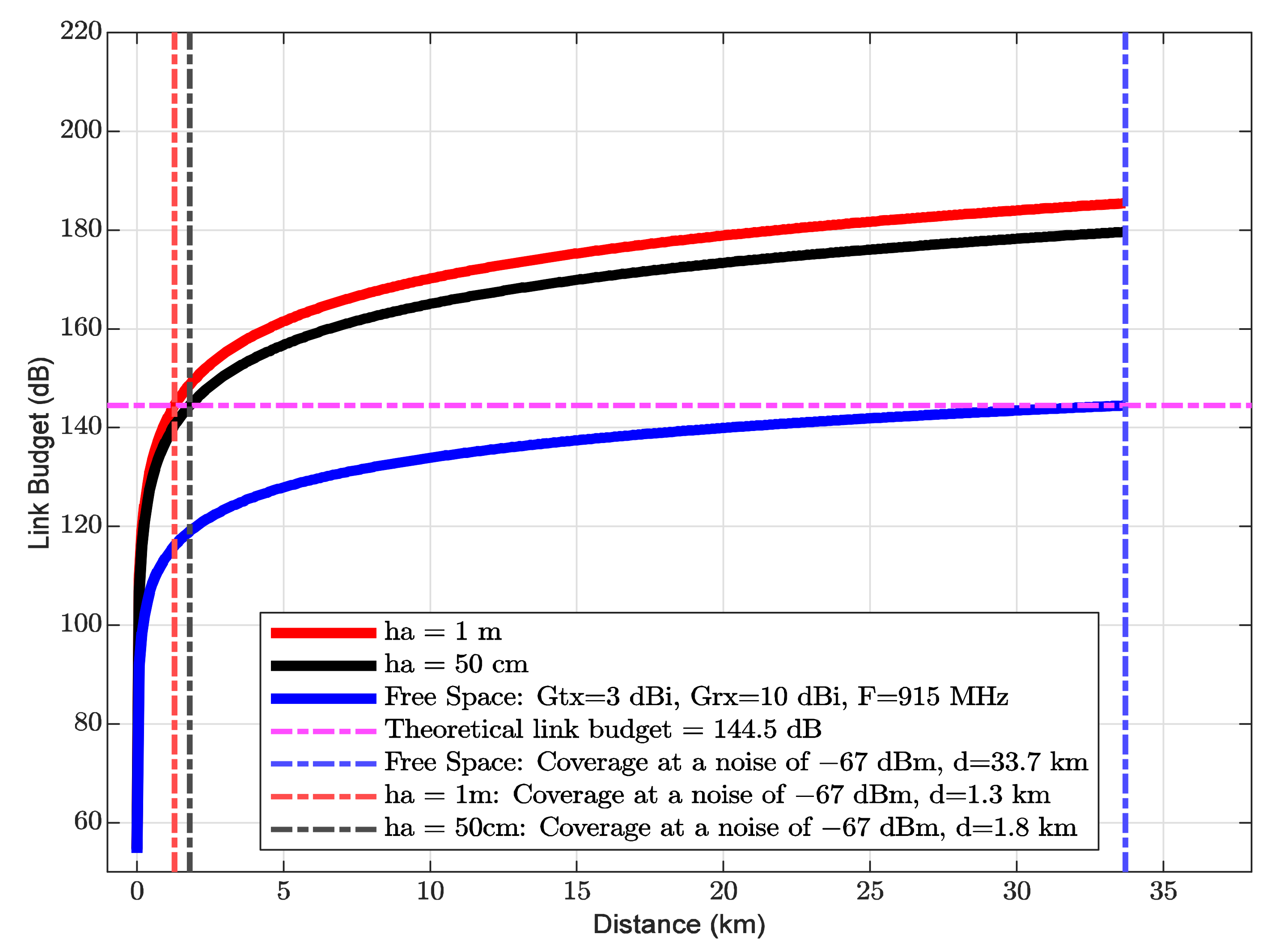
- Coverage analysis of the two experimental path loss models for two antenna heights over water within vegetation. In particular, antenna heights of 50 cm and 1 m were selected for the experiments, since they presented the lowest attenuation, compared to other heights above the leaves, twigs and long branches as seen in Figure 2 for the real scenario. In addition, it is shown that the coverage decreases significantly due to the increased path loss in our scenario.
2. Radio Propagation Overview for LoRa ED P2P Networks
2.1. RSSI as a Measure of Radio-Frequency Power
2.2. Propagation Studies of LoRa Technology over Water
2.3. Propagation Studies of LoRa Technology in Vegetated Areas
3. LoRa Technology
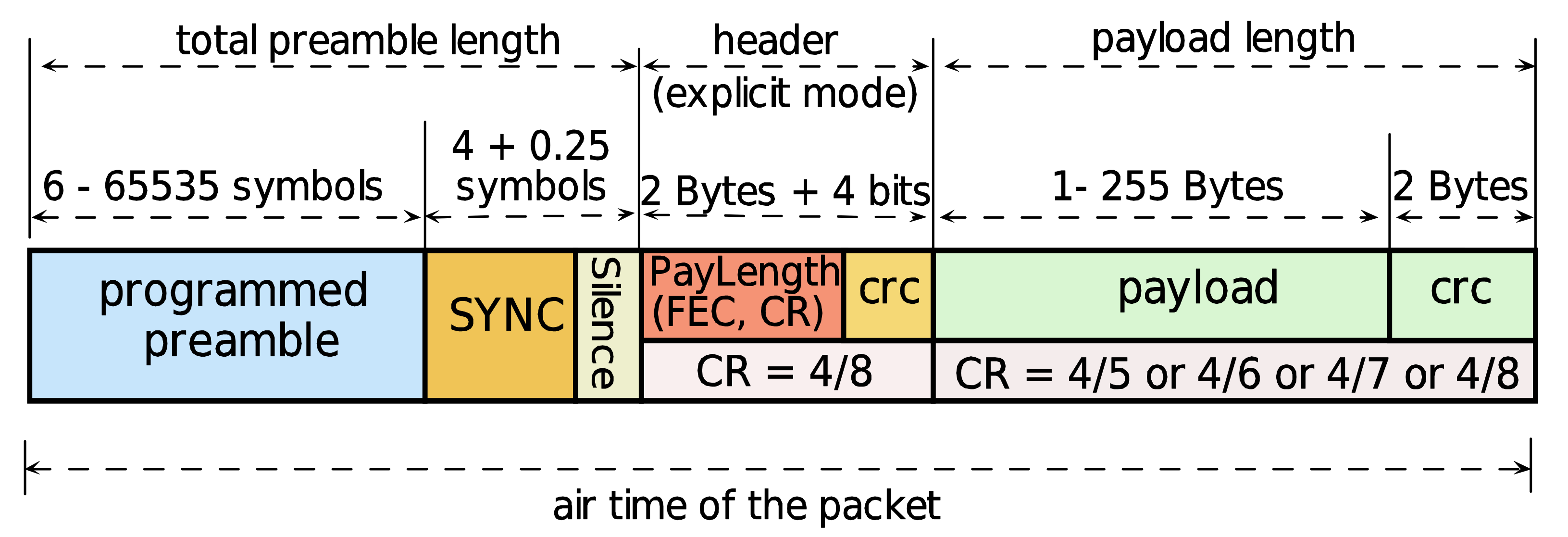
3.1. LoRa PHY Structure
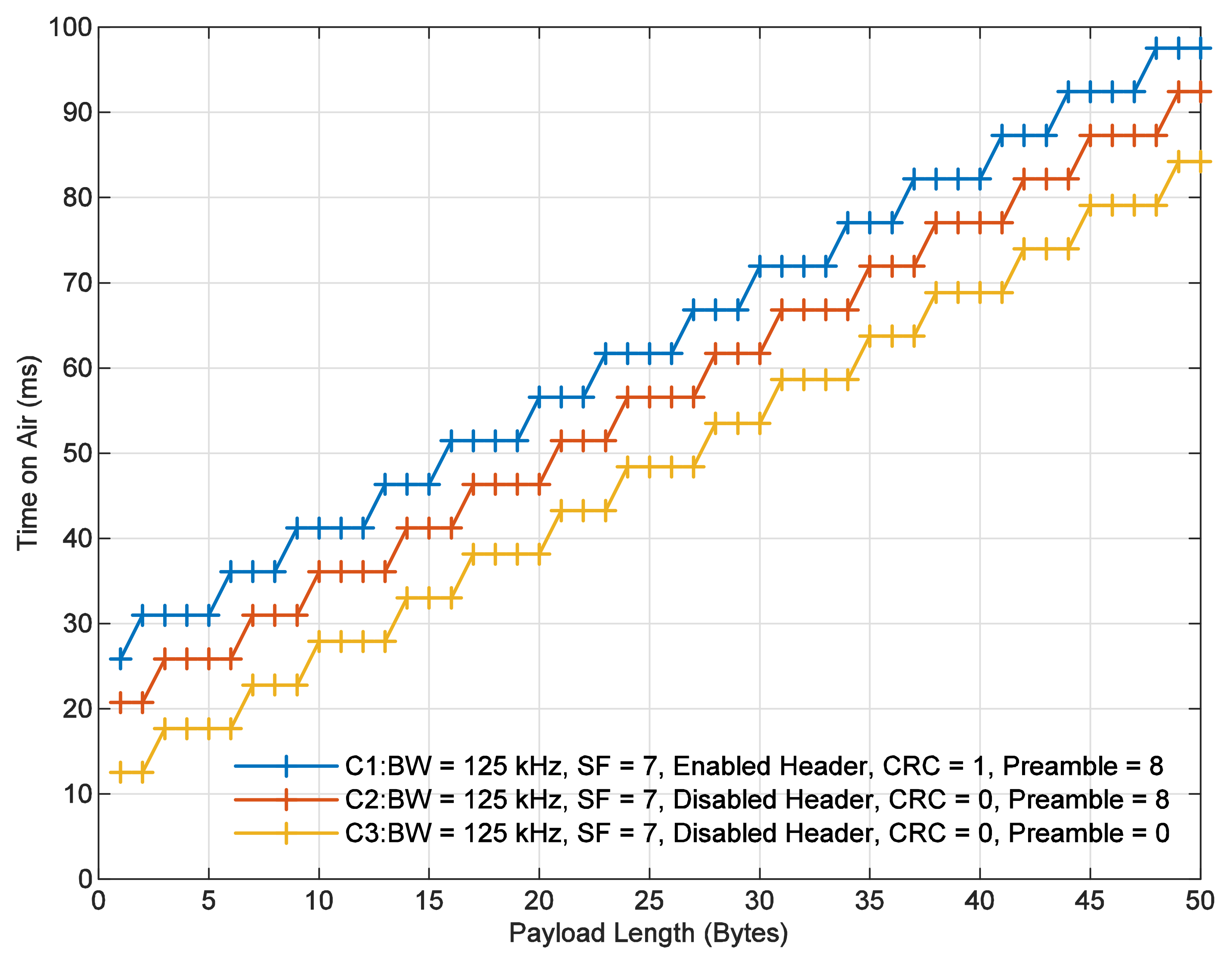
3.2. Frame Characterization of LoRa Transmissions
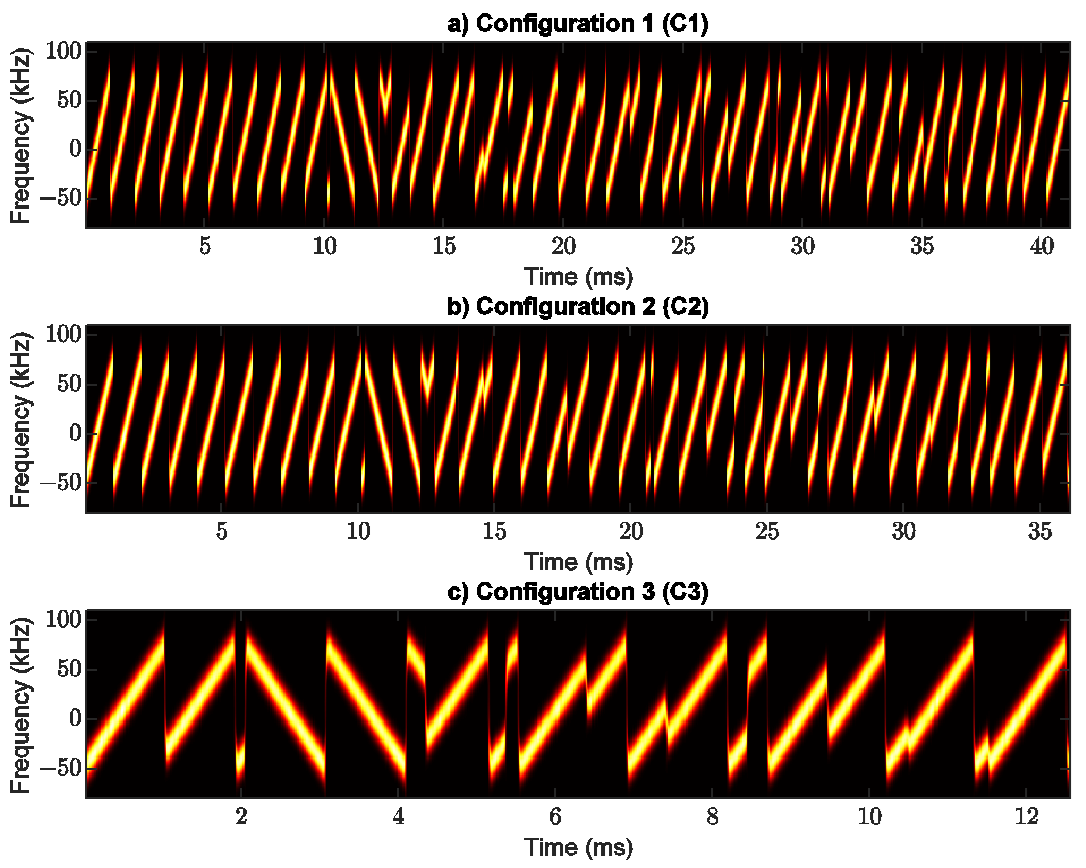
- C1: CRC enabled, header enabled, and programmed preamble of eight symbols.
- C2: CRC disabled, header disabled, and programmed preamble of eight symbols.
- C3: CRC disabled, header disabled, and without preamble.
3.3. Experimental Validation of the LoRa PHY Structure
4. Measurement Campaign
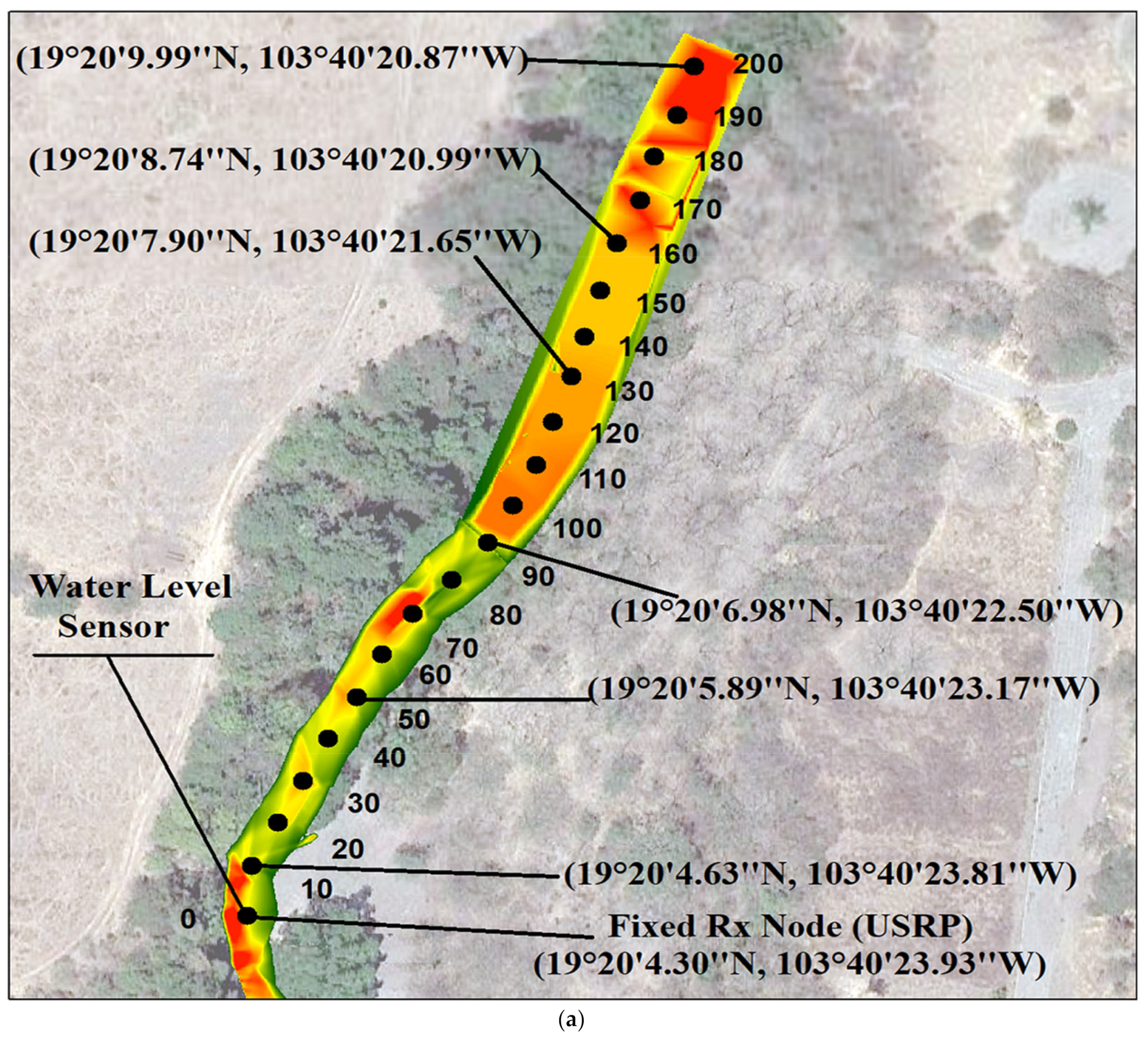
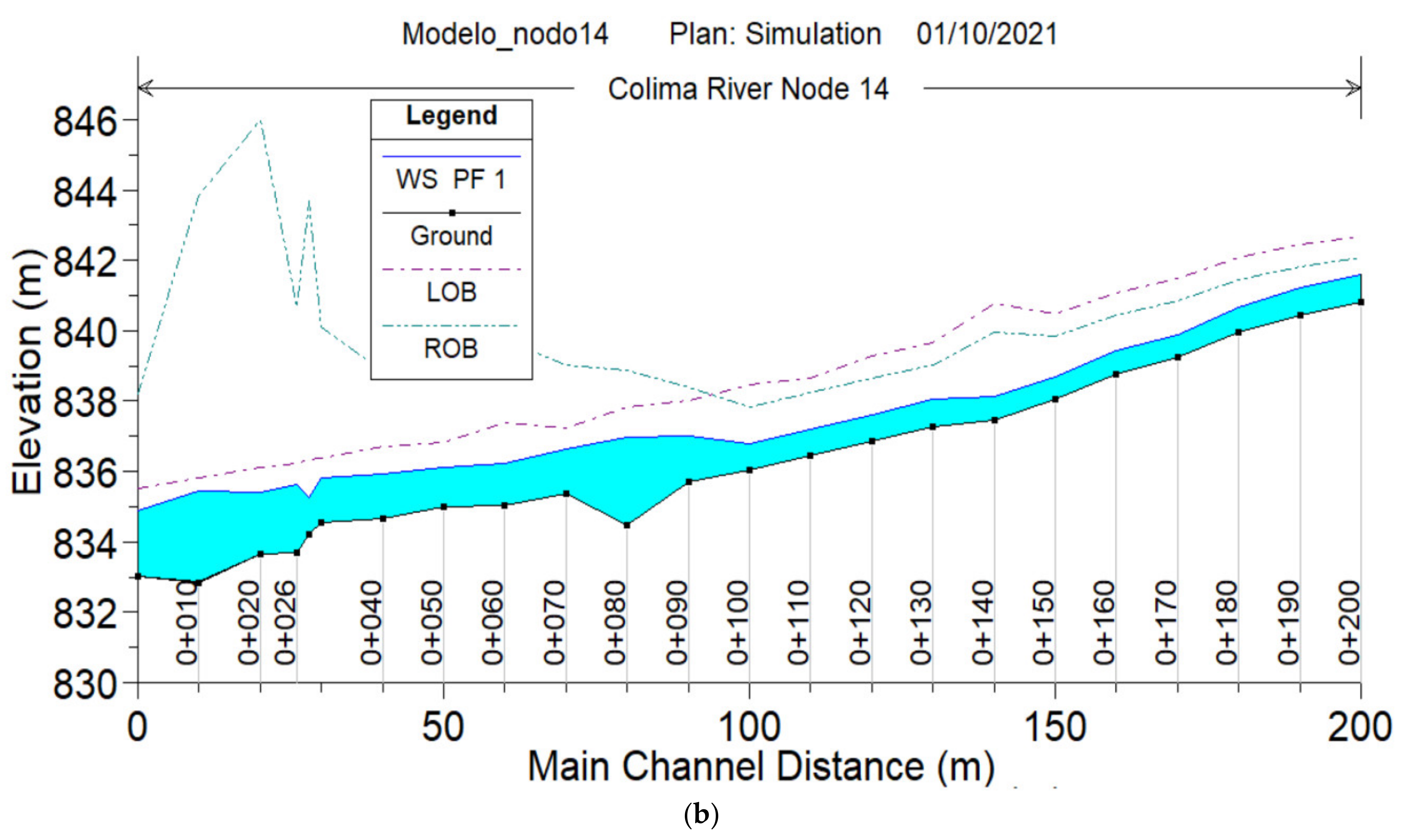
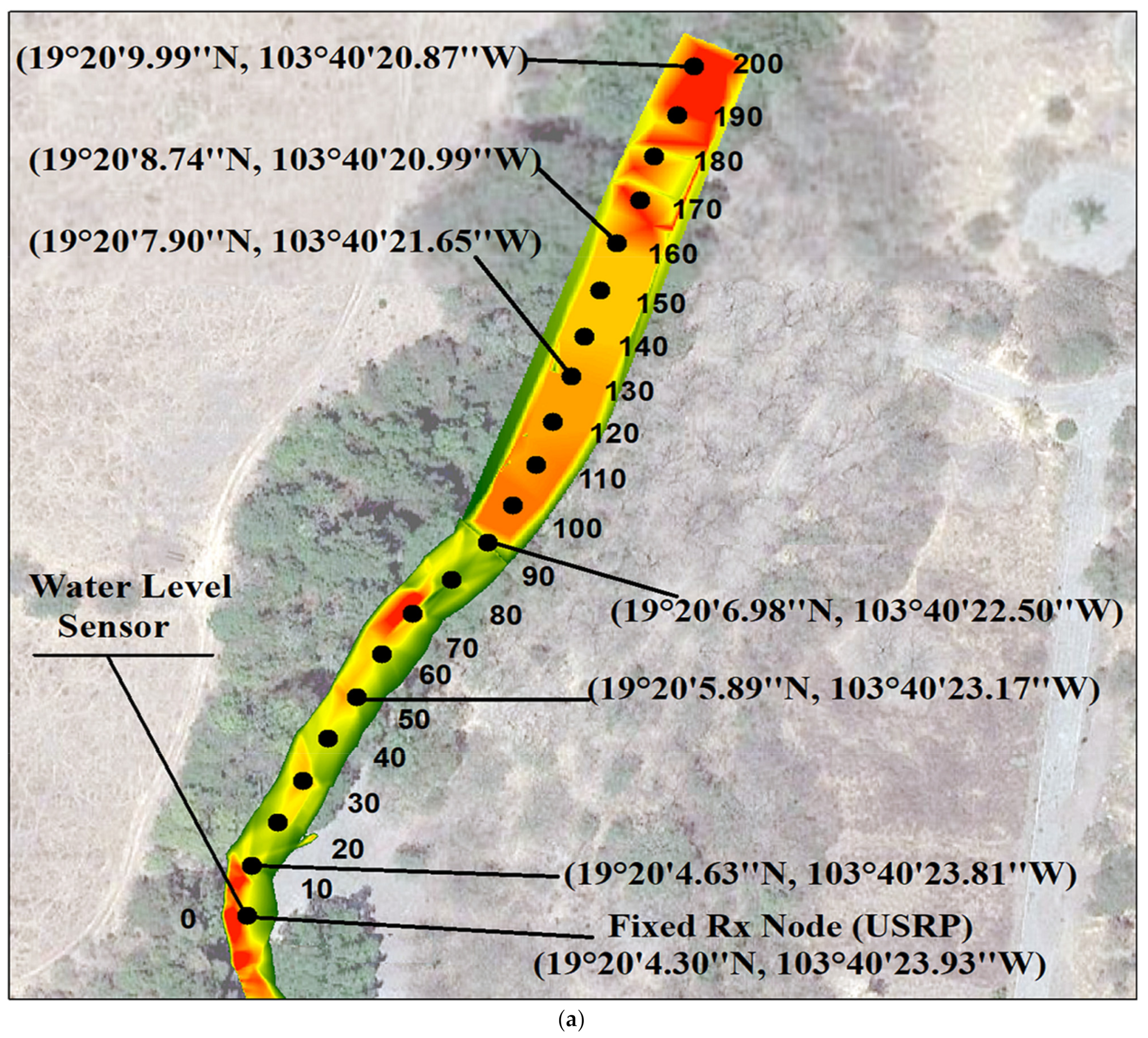
4.1. Environmental Characteristics
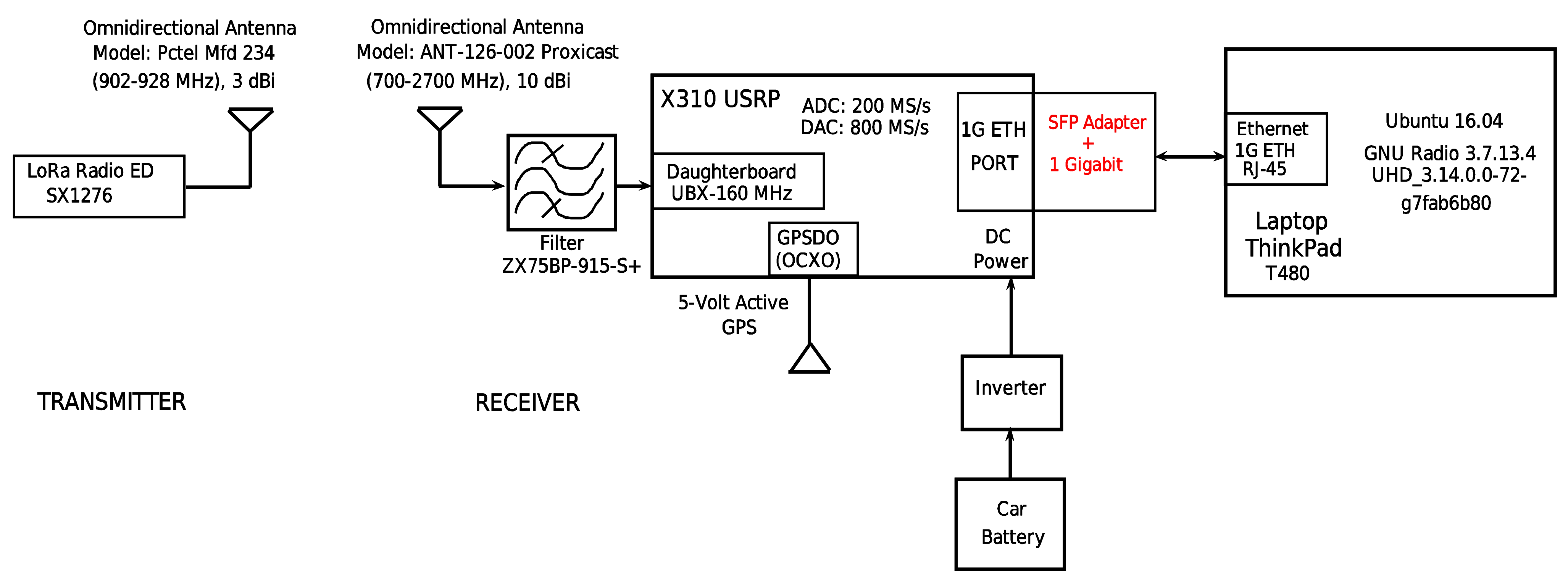
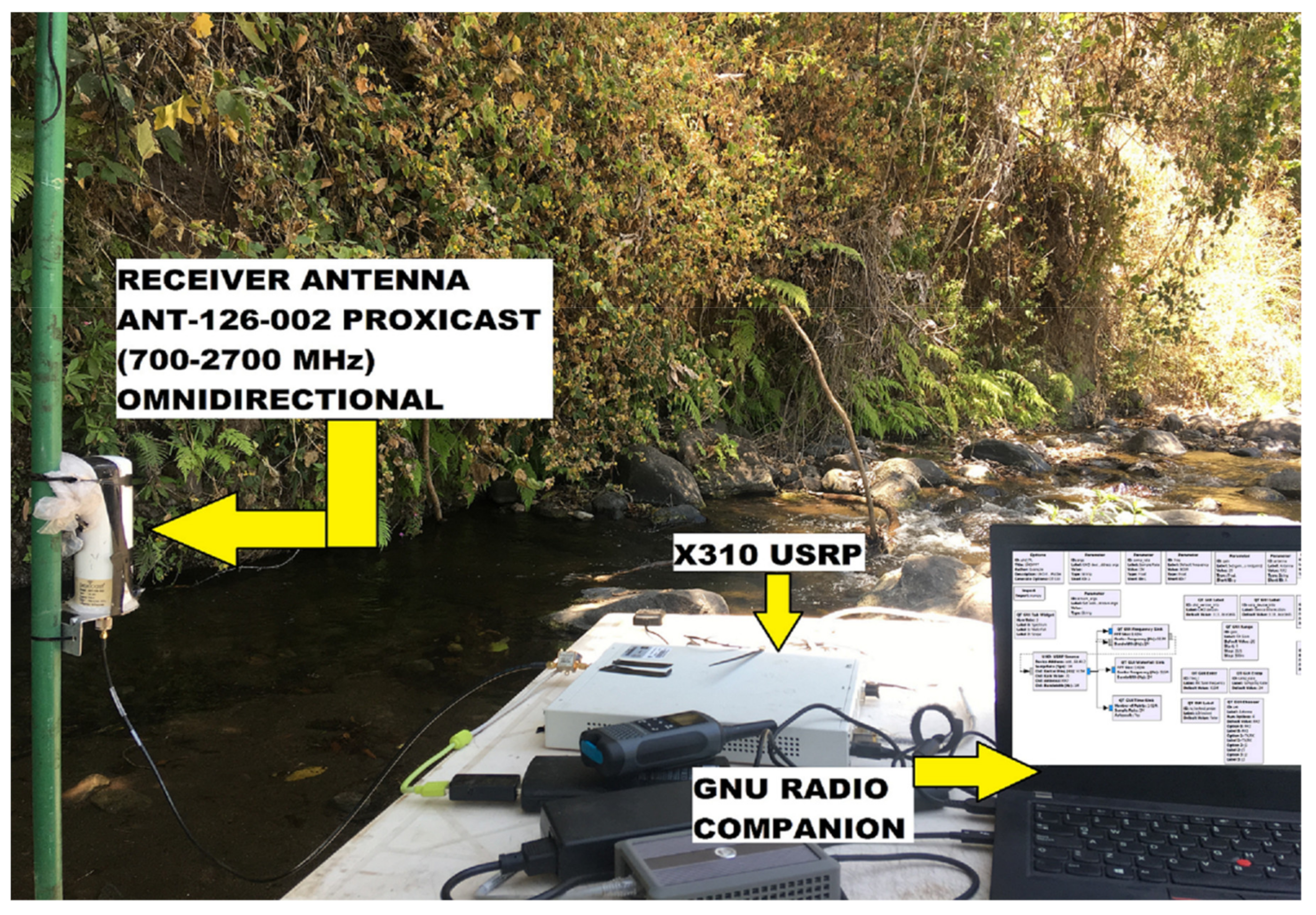
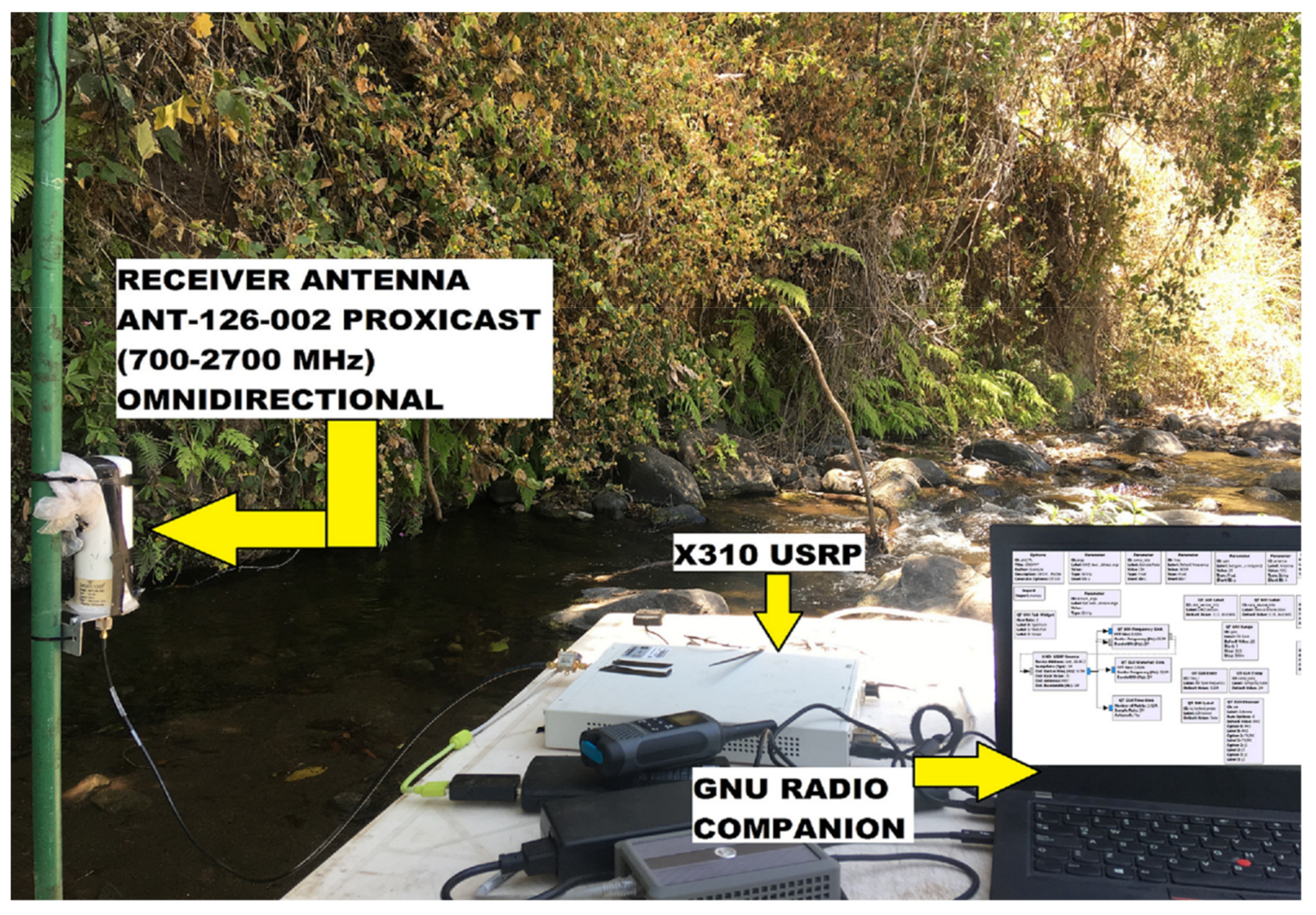
4.2. Device Setup and Configuration Parameters
5. Post-Processing
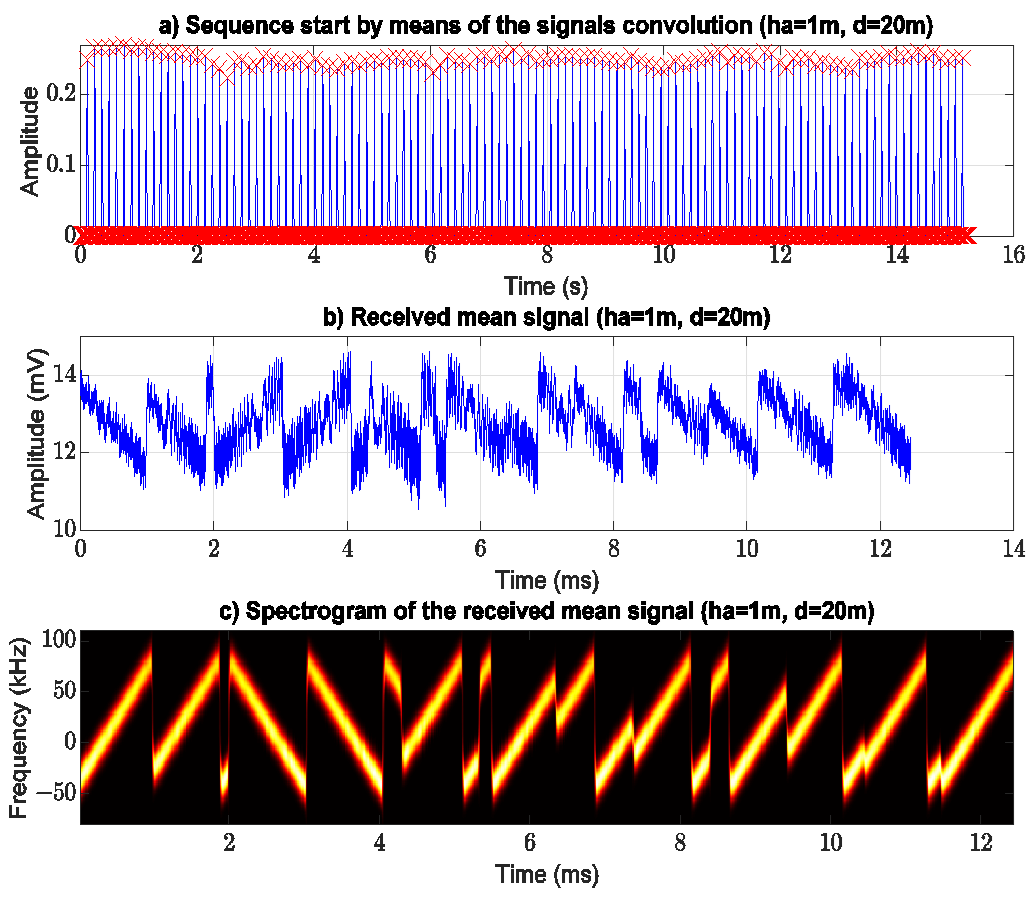
5.1. Computing the Received RF Power
| Algorithm 1. Signal processing for obtaining the mean signal and RF power. |
| Input: Spread factor SF; bandwidth BW; sampling rate fs; the number of symbols in each frame Nsym; receiver impedance Z; number of frames FrameNumbers. |
| Output: histograms of the average chirp’s signal as a power signal. |
| Initialization: SF = 7, BW = 125 [Hz], fs = 5 [SPS], Nsym = 12.25 (C3), FrameNumbers = 100 and Z = 50 [Ω]. |
|
|
|
The threshold parameter for each distance and height was obtained empirically so that the noise did not significantly affect the analyzed signal. These values are shown in Table 3.
for end FrameVectorMatrixNS[FrameNumbers]←FrameVector.
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| d (m) | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 | 120 | 130 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ha = 1 m: Threshold | 0.87 | 0.86 | 0.50 | 0.66 | 0.53 | 0.62 | 0.58 | 0.33 | 0.85 | 0.76 | 0.81 | 0.64 |
| ha = 50 cm: Threshold | 0.85 | 0.75 | 0.88 | 0.90 | 0.39 | 0.65 | 0.71 | 0.67 | 0.85 | 0.80 | 0.85 | 0.76 |
5.2. Experimental Path Loss Model
5.3. Linear Regression Using the Gradient Descent Technique
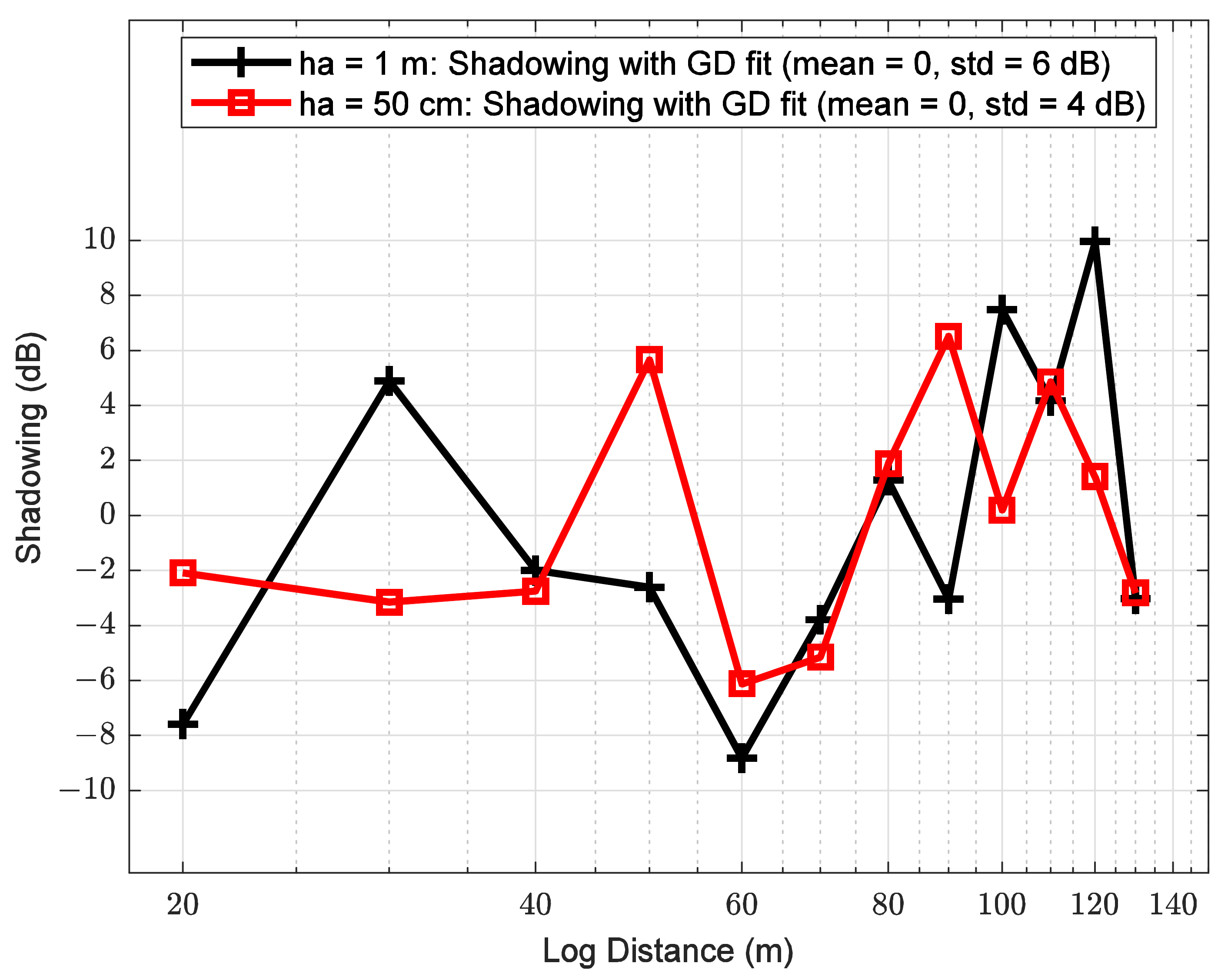
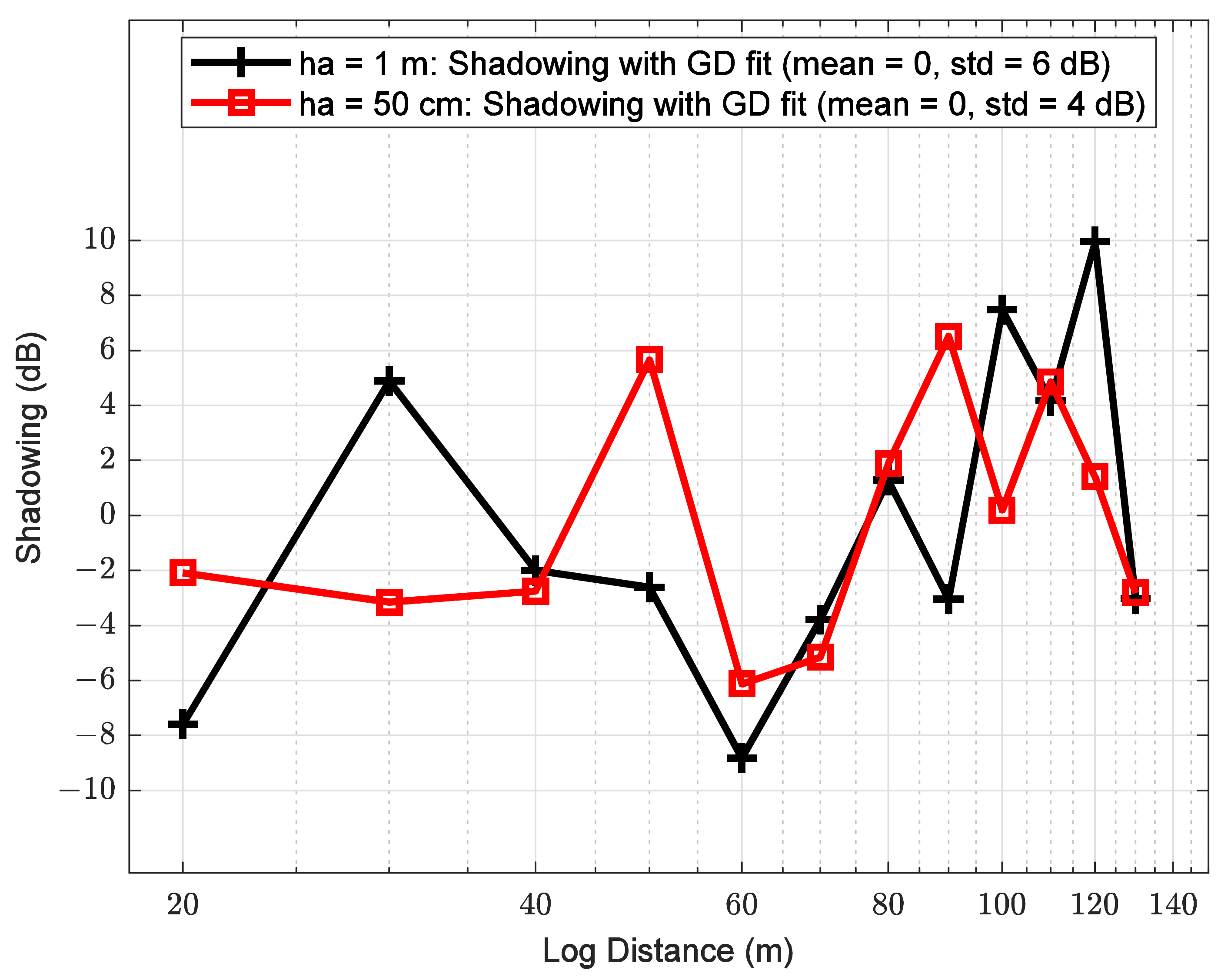
5.4. Shadowing
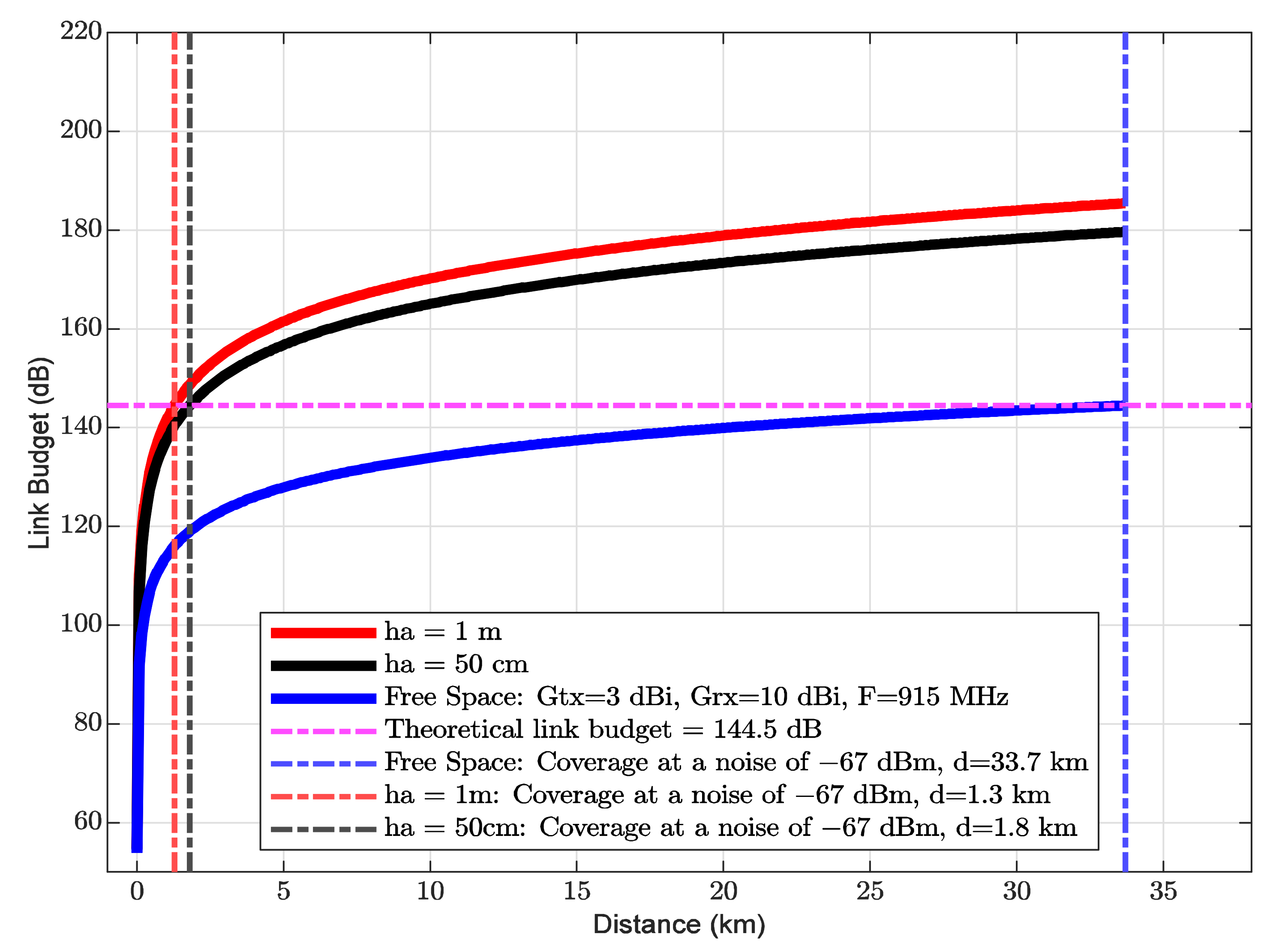
5.5. Link Budget Analysis
5.6. Theoretical Models of Path Loss and Foliage-Loss
6. Measurement Results and Analysis
6.1. Received RF Power
6.2. Path Loss
6.3. Shadowing
6.4. Link Budget
6.5. Comparison between Actual Measurements and the Theoretical Path Loss Models
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sciullo, L.; Trotta, A.; Felice, M.D. Design and Performance Evaluation of a LoRa-Based Mobile Emergency Management System (LOCATE). Ad Hoc Netw. 2020, 96, 101993. [Google Scholar] [CrossRef]
- Jagannath, J.; Furman, S.; Jagannath, A.; Ling, L.; Burger, A.; Drozd, A. HELPER: Heterogeneous Efficient Low Power Radio for Enabling Ad Hoc Emergency Public Safety Networks. Ad Hoc Netw. 2019, 89, 218–235. [Google Scholar] [CrossRef] [Green Version]
- Sidorov, M.; Nhut, P.V.; Matsumoto, Y.; Ohmura, R. LoRa-Based Precision Wireless Structural Health Monitoring System for Bolted Joints in a Smart City Environment. IEEE Access 2019, 7, 179235–179251. [Google Scholar] [CrossRef]
- Dupont, C.; Vecchio, M.; Pham, C.; Diop, B.; Dupont, C.; Koffi, S. An Open IoT Platform to Promote Eco-Sustainable Innovation in Western Africa: Real Urban and Rural Testbeds. Wirel. Commun. Mob. Comput. 2018, 2018, e1028578. [Google Scholar] [CrossRef] [Green Version]
- Moreno, C.; Aquino, R.; Ibarreche, J.; Pérez, I.; Castellanos, E.; Álvarez, E.; Rentería, R.; Anguiano, L.; Edwards, A.; Lepper, P.; et al. RiverCore: IoT Device for River Water Level Monitoring over Cellular Communications. Sensors 2019, 19, 127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ibarreche, J.; Aquino, R.; Edwards, R.M.; Rangel, V.; Pérez, I.; Martínez, M.; Castellanos, E.; Álvarez, E.; Jimenez, S.; Rentería, R.; et al. Flash Flood Early Warning System in Colima, Mexico. Sensors 2020, 20, 5231. [Google Scholar] [CrossRef]
- Mendoza-Cano, O.; Aquino-Santos, R.; López-de la Cruz, J.; Edwards, R.M.; Khouakhi, A.; Pattison, I.; Rangel-Licea, V.; Castellanos-Berjan, E.; Martinez-Preciado, M.A.; Rincón-Avalos, P.; et al. Experiments of an IoT-Based Wireless Sensor Network for Flood Monitoring in Colima, Mexico. J. Hydroinform. 2021, 23, 385–401. [Google Scholar] [CrossRef]
- Sundaram, J.P.S.; Du, W.; Zhao, Z. A Survey on LoRa Networking: Research Problems, Current Solutions, and Open Issues. IEEE Commun. Surv. Tutor. 2020, 22, 371–388. [Google Scholar] [CrossRef] [Green Version]
- Ertürk, M.A.; Aydın, M.A.; Büyükakkaşlar, M.T.; Evirgen, H. A Survey on LoRaWAN Architecture, Protocol and Technologies. Future Internet 2019, 11, 216. [Google Scholar] [CrossRef] [Green Version]
- Callebaut, G.; Perre, L.V. der Characterization of LoRa Point-to-Point Path Loss: Measurement Campaigns and Modeling Considering Censored Data. IEEE Internet Things J. 2020, 7, 1910–1918. [Google Scholar] [CrossRef]
- Hata, M. Empirical Formula for Propagation Loss in Land Mobile Radio Services. IEEE Trans. Veh. Technol. 1980, 29, 317–325. [Google Scholar] [CrossRef]
- Erceg, V.; Greenstein, L.J.; Tjandra, S.Y.; Parkoff, S.R.; Gupta, A.; Kulic, B.; Julius, A.A.; Bianchi, R. An Empirically Based Path Loss Model for Wireless Channels in Suburban Environments. IEEE J. Sel. Areas Commun. 1999, 17, 1205–1211. [Google Scholar] [CrossRef] [Green Version]
- Walfisch, J.; Bertoni, H.L. A Theoretical Model of UHF Propagation in Urban Environments. IEEE Trans. Antennas Propag. 1988, 36, 1788–1796. [Google Scholar] [CrossRef] [Green Version]
- Ndzi, D.L.; Kamarudin, L.M.; Muhammad Ezanuddin, A.A.; Zakaria, A.; Ahmad, R.B.; Malek, M.F.A.; Shakaff, A.Y.M.; Jafaar, M.N. Vegetation Attenuation Measurements And Modeling In Plantations For Wireless Sensor Network Planning. PIER B 2012, 36, 283–301. [Google Scholar] [CrossRef] [Green Version]
- Chall, R.E.; Lahoud, S.; Helou, M.E. LoRaWAN Network: Radio Propagation Models and Performance Evaluation in Various Environments in Lebanon. IEEE Internet Things J. 2019, 6, 2366–2378. [Google Scholar] [CrossRef]
- Avila-Campos, P.; Astudillo-Salinas, F.; Vazquez-Rodas, A.; Araujo, A. Evaluation of LoRaWAN Transmission Range for Wireless Sensor Networks in Riparian Forests. In Proceedings of the 22nd International ACM Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems; Association for Computing Machinery: New York, NY, USA, 2019; pp. 199–206. [Google Scholar]
- Petajajarvi, J.; Mikhaylov, K.; Roivainen, A.; Hanninen, T.; Pettissalo, M. On the Coverage of LPWANs: Range Evaluation and Channel Attenuation Model for LoRa Technology. In Proceedings of the 2015 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015; pp. 55–59. [Google Scholar]
- Hwang, L.-C.; Chen, C.-S.; Ku, T.-T.; Shyu, W.-C. A Bridge between the Smart Grid and the Internet of Things: Theoretical and Practical Roles of LoRa. Int. J. Electr. Power Energy Syst. 2019, 113, 971–981. [Google Scholar] [CrossRef]
- Demetri, S.; Zúñiga, M.; Picco, G.P.; Kuipers, F.; Bruzzone, L.; Telkamp, T. Automated Estimation of Link Quality for LoRa: A Remote Sensing Approach. In Proceedings of the 2019 18th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Montreal, QC, Canada, 15–18 April 2019; pp. 145–156. [Google Scholar]
- Benaissa, S.; Plets, D.; Tanghe, E.; Trogh, J.; Martens, L.; Vandaele, L.; Verloock, L.; Tuyttens, F.a.M.; Sonck, B.; Joseph, W. Internet of Animals: Characterisation of LoRa Sub-GHz off-Body Wireless Channel in Dairy Barns. Electron. Lett. 2017, 53, 1281–1283. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Kim, J.Y.; Huang, W.; Kanhere, S.S.; Jha, S.K.; Hu, W. Measurement, Characterization, and Modeling of LoRa Technology in Multifloor Buildings. IEEE Internet Things J. 2020, 7, 298–310. [Google Scholar] [CrossRef] [Green Version]
- Jovalekic, N.; Drndarevic, V.; Pietrosemoli, E.; Darby, I.; Zennaro, M. Experimental Study of LoRa Transmission over Seawater. Sensors 2018, 18, 2853. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanchez-Iborra, R.; Liaño, I.G.; Simoes, C.; Couñago, E.; Skarmeta, A.F. Tracking and Monitoring System Based on LoRa Technology for Lightweight Boats. Electronics 2019, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Parri, L.; Parrino, S.; Peruzzi, G.; Pozzebon, A. Low Power Wide Area Networks (LPWAN) at Sea: Performance Analysis of Offshore Data Transmission by Means of LoRaWAN Connectivity for Marine Monitoring Applications. Sensors 2019, 19, 3239. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Ren, J.; Zhu, Q. On the Application of LoRa LPWAN Technology in Sailing Monitoring System. In Proceedings of the 2017 13th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Jackson Hole, WY, USA, 21–24 February 2017; pp. 77–80. [Google Scholar]
- Madeo, D.; Pozzebon, A.; Mocenni, C.; Bertoni, D. A Low-Cost Unmanned Surface Vehicle for Pervasive Water Quality Monitoring. IEEE Trans. Instrum. Meas. 2020, 69, 1433–1444. [Google Scholar] [CrossRef]
- Ferreira, A.E.; Ortiz, F.M.; Costa, L.H.M.K.; Foubert, B.; Amadou, I.; Mitton, N. A Study of the LoRa Signal Propagation in Forest, Urban, and Suburban Environments. Ann. Telecommun. 2020, 75, 333–351. [Google Scholar] [CrossRef]
- Wu, Y.; Guo, G.; Tian, G.; Liu, W. A Model with Leaf Area Index and Trunk Diameter for LoRaWAN Radio Propagation in Eastern China Mixed Forest. J. Sens. 2020, 2020, 1–16. [Google Scholar] [CrossRef]
- Ansah, M.R.; Sowah, R.A.; Melià-Seguí, J.; Katsriku, F.A.; Vilajosana, X.; Banahene, W.O. Characterising Foliage Influence on LoRaWAN Pathloss in a Tropical Vegetative Environment. IET Wirel. Sens. Syst. 2020, 10, 198–207. [Google Scholar] [CrossRef]
- Villarim, M.R.; de Luna, J.V.; de Farias Medeiros, D.; Pereira, R.I.; de Souza, C.P.; Baiocchi, O.; da Cunha Martins, F.C. An Evaluation of LoRa Communication Range in Urban and Forest Areas: A Case Study in Brazil and Portugal. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 0827–0832. [Google Scholar]
- Iova, O.; Murphy, A.L.; Picco, G.P.; Ghiro, L.; Molteni, D.; Ossi, F.; Cagnacci, F. LoRa from the City to the Mountains: Exploration of Hardware and Environmental Factors. In Proceedings of the 2017 International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017; pp. 317–322. [Google Scholar]
- Sinha, R.S.; Wei, Y.; Hwang, S.-H. A Survey on LPWA Technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Liando, J.C.; Gamage, A.; Tengourtius, A.W.; Li, M. Known and Unknown Facts of LoRa: Experiences from a Large-Scale Measurement Study. ACM Trans. Sen. Netw. 2019, 15, 1–35. [Google Scholar] [CrossRef]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef] [Green Version]
- Petäjäjärvi, J.; Mikhaylov, K.; Pettissalo, M.; Janhunen, J.; Iinatti, J. Performance of a Low-Power Wide-Area Network Based on LoRa Technology: Doppler Robustness, Scalability, and Coverage. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef] [Green Version]
- Doroshkin, A.A.; Zadorozhny, A.M.; Kus, O.N.; Prokopyev, V.Y.; Prokopyev, Y.M. Experimental Study of LoRa Modulation Immunity to Doppler Effect in CubeSat Radio Communications. IEEE Access 2019, 7, 75721–75731. [Google Scholar] [CrossRef]
- Bernier, C.; Dehmas, F.; Deparis, N. Low Complexity LoRa Frame Synchronization for Ultra-Low Power Software-Defined Radios. IEEE Trans. Commun. 2020, 68, 3140–3152. [Google Scholar] [CrossRef] [Green Version]
- Angrisani, L.; Arpaia, P.; Bonavolontà, F.; Conti, M.; Liccardo, A. LoRa Protocol Performance Assessment in Critical Noise Conditions. In Proceedings of the 2017 IEEE 3rd International Forum on Research and Technologies for Society and Industry (RTSI), Modena, Italy, 11–13 September 2017; pp. 1–5. [Google Scholar]
- Seller, O.B.A.; Sornin, N. Low Power Long Range Transmitter. U.S. Patent US 9,252,834, 2 February 2016. [Google Scholar]
- Robyns, P.; Quax, P.; Lamotte, W.; Thenaers, W. A Multi-Channel Software Decoder for the LoRa Modulation Scheme. In Proceedings of the 3rd International Conference on Internet of Things, Big Data and Security (IoTBDS), Madeira, Portugal, 19–21 March 2018; pp. 41–51. [Google Scholar]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A Study of LoRa: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar] [CrossRef]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A Survey of LoRaWAN for IoT: From Technology to Application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Casals, L.; Mir, B.; Vidal, R.; Gomez, C. Modeling the Energy Performance of LoRaWAN. Sensors 2017, 17, 2364. [Google Scholar] [CrossRef] [Green Version]
- SX1272/3/6/7/8: LoRa Modem Designer’s Guide. Available online: http://wiki.lahoud.fr/lib/exe/fetch.php?media=ds_sx1276-7-8-9_w_app_v5.pdf (accessed on 5 April 2020).
- Bor, M.C.; Roedig, U.; Voigt, T.; Alonso, J.M. Do LoRa Low-Power Wide-Area Networks Scale? In Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems; Association for Computing Machinery: New York, NY, USA, 2016; pp. 59–67. [Google Scholar]
- Gogendeau, P.; Murad, N.M.; Bernard, S.; Kerzerho, V.; Deknyff, L.; Bonhommeau, S. Oversea Radio Measurements and Channel Characterization with LoRa Technology. In Proceedings of the 2018 IEEE Radio and Antenna Days of the Indian Ocean (RADIO), Wolmar, Mauritius, 15–18 October 2018; pp. 1–2. [Google Scholar]
- Pan, H.; Niu, X.; Li, R.; Dou, Y.; Jiang, H. Annealed Gradient Descent for Deep Learning. Neurocomputing 2020, 380, 201–211. [Google Scholar] [CrossRef]
- Nguyen, B.; Morell, C.; De Baets, B. Scalable Large-Margin Distance Metric Learning Using Stochastic Gradient Descent. IEEE Trans. Cybern. 2020, 50, 1072–1083. [Google Scholar] [CrossRef]
- Russell, S.J.; Norvig, P.; Davis, E. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice Hall Series in Artificial Intelligence; Prentice Hall: Upper Saddle River, NJ, USA, 2010; ISBN 978-0-13-604259-4. [Google Scholar]
- Yu, C.-C.; Liu, B.-D. A Backpropagation Algorithm with Adaptive Learning Rate and Momentum Coefficient. In Proceedings of the 2002 International Joint Conference on Neural Networks, IJCNN’02 (Cat. No.02CH37290), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1218–1223. [Google Scholar]
- Sharma, A. Guided Parallelized Stochastic Gradient Descent for Delay Compensation. Appl. Soft Comput. 2021, 102, 107084. [Google Scholar] [CrossRef]
- Michalewicz, Z.; Fogel, D.B. How to Solve It: Modern Heuristics, 2nd ed.; rev.extended ed.; Springer: Berlin, Germany; New York, NY, USA, 2004; ISBN 978-3-540-22494-5. [Google Scholar]
- Tanghe, E.; Joseph, W.; Verloock, L.; Martens, L.; Capoen, H.; Herwegen, K.V.; Vantomme, W. The Industrial Indoor Channel: Large-Scale and Temporal Fading at 900, 2400, and 5200 MHz. IEEE Trans. Wirel. Commun. 2008, 7, 2740–2751. [Google Scholar] [CrossRef]
- Phillips, C.; Sicker, D.; Grunwald, D. A Survey of Wireless Path Loss Prediction and Coverage Mapping Methods. IEEE Commun. Surv. Tutor. 2013, 15, 255–270. [Google Scholar] [CrossRef]
- Raheemah, A.; Sabri, N.; Salim, M.S.; Ehkan, P.; Ahmad, R.B. New Empirical Path Loss Model for Wireless Sensor Networks in Mango Greenhouses. Comput. Electron. Agric. 2016, 127, 553–560. [Google Scholar] [CrossRef]
- Hejselbæk, J.; Ødum Nielsen, J.; Fan, W.; Pedersen, G.F. Empirical Study of Near Ground Propagation in Forest Terrain for Internet-of-Things Type Device-to-Device Communication. IEEE Access 2018, 6, 54052–54063. [Google Scholar] [CrossRef]
- Sabri, N.; Aljunid, S.A.; Salim, M.S.; Fouad, S.; Kamaruddin, R. Wireless Sensor Network Wave Propagation in Vegetation. In Recent Trends in Physics of Material Science and Technology; Gaol, F.L., Shrivastava, K., Akhtar, J., Eds.; Springer Series in Materials Science; Springer: Singapore, 2015; pp. 283–298. ISBN 978-981-287-128-2. [Google Scholar]
- Weissberger, M.A. An Initial Critical Summary of Models for Predicting the Attenuation of Radio Waves by Trees; Defense Technical Information Center: Fort Belvoir, VA, USA, 1982. [Google Scholar]
- Influence of Terrain Irregularities and Vegetation on Tropospheric Propagation; CCIR: Geneva, Switzerland, 1986.
- COST 235: Radiowave Propagation Effects on Next-Generation Fixed-Services Terrestrial Telecommunications Systems; European Commision: Brussels, Belgium, 1996.
- Al-Nuaimi, M.O.; Stephens, R.B.L. Measurements and Prediction Model Optimisation for Signal Attenuation in Vegetation Media at Centimetre Wave Frequencies. Antennas Propag. IEE Proc.-Microw. 1998, 145, 201–206. [Google Scholar] [CrossRef]
- RECOMMENDATION ITU-R P.833-9–Attenuation in Vegetation. 29. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.833-9-201609-S!!PDF-E.pdf (accessed on 6 October 2021).
- Gozalvez, J.; Sepulcre, M.; Bauza, R. Impact of the Radio Channel Modelling on the Performance of VANET Communication Protocols. Telecommun. Syst. 2012, 50, 149–167. [Google Scholar] [CrossRef]
- Molisch, A.F. Propagation Mechanisms. In Wireless Communications; John Wiley & Sons: Hoboken, NJ, USA, 2012; pp. 45–67. [Google Scholar]
- Kumar, A.; Thakur, P.; Pandit, S.; Singh, G. Fixed and Dynamic Threshold Selection Criteria in Energy Detection for Cognitive Radio Communication Systems. In Proceedings of the 2017 Tenth International Conference on Contemporary Computing (IC3), Noida, India, 10–12 August 2017; pp. 1–6. [Google Scholar]
- Liu, L.; Tao, C.; Matolak, D.W.; Zhou, T.; Chen, H. Investigation of Shadowing Effects in Typical Propagation Scenarios for High-Speed Railway at 2350 MHz. Int. J. Antennas Propag. 2016, 2016, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Olasupo, T.O.; Otero, C.E.; Olasupo, K.O.; Kostanic, I. Empirical Path Loss Models for Wireless Sensor Network Deployments in Short and Tall Natural Grass Environments. IEEE Trans. Antennas Propag. 2016, 64, 4012–4021. [Google Scholar] [CrossRef]
- Olasupo, T.O. Propagation Modeling of IoT Devices for Deployment in Multi-Level Hilly Urban Environments. In Proceedings of the 2018 IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 1–3 November 2018; pp. 346–352. [Google Scholar]
- Geng, Y.; Edwards, R.M.; Davis, J.G.; Lepper, P.; Pattison, I.; Khouakhi, A.; Clark, B.; Diamantides, K.; Dai, C.; Kaczmarczyk, M.; et al. Impact of Heavy Rain on Signal Propagation in the UK and Mexican 4G and 5G Networks. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–5. [Google Scholar]









| Reference | [17] | [22] | [23] | [24] | [25] | |||
|---|---|---|---|---|---|---|---|---|
| Coverage (km) | 30 | 22 | 28 | 4 | 12.96 | 0.4 | ||
| Frequency (MHz) | 868 LOS | 433 LOS | 868 LOS | 433 NLOS | 433 NLOS | 868 LOS | 433 LOS | |
| PL-d0 (dB) | 128.95 | X | X | X | X | X | X | X |
| d0 (m) | 1000 | X | X | X | X | X | X | X |
| PLE | 1.76 | X | X | X | X | X | X | X |
| TAH (m) | 2 | Not mentioned | Not mentioned | Not mentioned | 3 | 2.1 | 3.5 | 1.5 |
| RAH (m) | 24 | Not mentioned | Not mentioned | Not mentioned | 0.8 | 13.2 | 13.2 | 4 |
| Scenario | Sea | Sea | Sea | Sea | Sea | Sea | Sea | Sea |
| RSSI Calibration | Not used | X | X | X | X | X | X | X |
| Reference | [10] | [15] | [16] | [27] | [28] | [29] | [30] | [31] | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Coverage (km) | 0.71 | 47 | 1.5 (DR3) | 1.6 (DR0) | 0.25 | X | 1.75 | 0.23 | 1 | 0.05–0.09 | ||
| Frequency (MHz) | 868 | 868 NLOS | 868 LOS | 915 NLOS | 915 NLOS | 433 NLOS | 868 NLOS | 915 NLOS | 868 NLOS | 868 NLOS | ||
| PL-d0 (dB) | 95.5 | 111 | Not mentioned | 61.1 | 55.3 | X | X | X | X | X | X | |
| d0 (m) | 1 | Not mentioned | Not mentioned | X | X | X | X | X | X | |||
| PLE | 2.0 | 3.0 | 1.9 | 1.0 | 1.1 | X | X | X | X | X | X | |
| TAH (m) | 1.5 | 0.2 | 3 | 1.5 | <2 | <2 | X | 0.5, 1.3, 2, 2.5, 3 | 2 | 1 | 1 | X |
| RAH (m) | 1.5 | 70 | 70 | <2 | <2 | X | 1.3 | 2.5 | 1 | 1 | X | |
| Scenario | Forest | Rural with trees | Rural with trees | Forest | Forest | Forest | Forest | Forest near lake | Vegetation | |||
| RSSI Calibration | Not used | Not used | Not used | X | X | X | X | X | X | |||
| Model | A | B | C | Conditions |
|---|---|---|---|---|
| Weissberger [58] | 1.33 | 0.284 | 0.588 | |
| 0.45 | 0.284 | 1 | ||
| ITU-R [59] | 0.2 | 0.3 | 0.6 | |
| COST 235 [60] | 26.6 | −0.2 | 0.5 | out-of-leaf |
| 15.6 | −0.009 | 0.26 | in-leaf | |
| FITU-R [61] | 0.37 | 0.18 | 0.59 | out-of-leaf |
| 0.39 | 0.39 | 0.25 | in-leaf |
| Frequency (MHz) | A1 (dB) | α1 | γ | Condition |
|---|---|---|---|---|
| 105.9–2117.5 | 1.37 | 0.42 | 0.2 | Mixed forest (height 14 m) hrx = 1.5 m |
| d (m) | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 | 120 | 130 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ha = 1 m: PN (dBm) | −69.2 | −67.2 | −69.1 | −67.2 | −66.8 | −69.1 | −67.9 | −68.9 | −68.9 | −67.9 | −68.0 | −68.2 |
| ha = 1 m: SNR (dB) | 39 | 45 | 32 | 35 | 22 | 27 | 30 | 25 | 42 | 28 | 33 | 19 |
| ha = 50 cm: PN (dBm) | −66.5 | −64.8 | −65.9 | −64.3 | −67.7 | −63.7 | −66.9 | −66.1 | −64.3 | −66.7 | −60.8 | −62.3 |
| ha = 50 cm: SNR (dB) | 43 | 36 | 34 | 38 | 27 | 22 | 31 | 33 | 24 | 30 | 19 | 16 |
| Environment | Antenna Height (m) | PLE | PL(d0 = 1m) (dB) | σ (dB) | R2 | Iterations GD Technique | Learning Rate |
|---|---|---|---|---|---|---|---|
| River within vegetation | 0.5 | 2.8 | 17.6 | 4 | 1 | 30,000 | 0.0001 |
| River within vegetation | 1 | 2.9 | 17.8 | 6 | 1 | 61,000 | 0.0001 |
| Parameters | Value |
|---|---|
| Noise measured in the river within vegetation | −67 dBm |
| Distance | From 1 m to 33.7 km |
| Antenna transmitter gain | 3 dBi |
| Antenna receiver gain | 10 dBi |
| Transmitter power | 20 dBm |
| Frequency | 915 MHz |
| Noise figure | 6 dB |
| Bandwidth | 125 kHz |
| Theoretical Model | MAPE (%) | |
|---|---|---|
| Experimental Models | ||
| ha = 1 m, σ = 6 dB | ha = 50 cm, σ = 4 dB | |
| FSPL | 31 | 28 |
| FSPL + ITU-R P.2108-0 | 15 | 11 |
| FSPL + FITU-R (in-leaf) | 12 | 17 |
| FSPL + ITU-R P.833-09 | 14 | 10 |
| Theoretical Model | MAPE (%) | |
|---|---|---|
| Experimental Models | ||
| ha = 1 m, σ = 6 dB | ha = 50 cm, σ = 4 dB | |
| Two Rays | 15 | 24 |
| Two Rays + ITU-R P.2108-0 | 31 | 46 |
| Two Rays + FITU-R (in-leaf) | 58 | 74 |
| Two Rays + ITU-R P.833-09 | 32 | 46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gutiérrez-Gómez, A.; Rangel, V.; Edwards, R.M.; Davis, J.G.; Aquino, R.; López-De la Cruz, J.; Mendoza-Cano, O.; Lopez-Guerrero, M.; Geng, Y. A Propagation Study of LoRa P2P Links for IoT Applications: The Case of Near-Surface Measurements over Semitropical Rivers. Sensors 2021, 21, 6872. https://doi.org/10.3390/s21206872
Gutiérrez-Gómez A, Rangel V, Edwards RM, Davis JG, Aquino R, López-De la Cruz J, Mendoza-Cano O, Lopez-Guerrero M, Geng Y. A Propagation Study of LoRa P2P Links for IoT Applications: The Case of Near-Surface Measurements over Semitropical Rivers. Sensors. 2021; 21(20):6872. https://doi.org/10.3390/s21206872
Chicago/Turabian StyleGutiérrez-Gómez, Amado, Víctor Rangel, Robert M. Edwards, John G. Davis, Raúl Aquino, Jesús López-De la Cruz, Oliver Mendoza-Cano, Miguel Lopez-Guerrero, and Yu Geng. 2021. "A Propagation Study of LoRa P2P Links for IoT Applications: The Case of Near-Surface Measurements over Semitropical Rivers" Sensors 21, no. 20: 6872. https://doi.org/10.3390/s21206872
APA StyleGutiérrez-Gómez, A., Rangel, V., Edwards, R. M., Davis, J. G., Aquino, R., López-De la Cruz, J., Mendoza-Cano, O., Lopez-Guerrero, M., & Geng, Y. (2021). A Propagation Study of LoRa P2P Links for IoT Applications: The Case of Near-Surface Measurements over Semitropical Rivers. Sensors, 21(20), 6872. https://doi.org/10.3390/s21206872