
Modeling and Optimization of a Novel ScAlN-Based MEMS Scanning Mirror with Large Static and Dynamic Two-Axis Tilting Angles

 , ,
, ,
Abstract
:1. Introduction
2. Electromechanical Design of ScAlN-Based Piezoelectric Micro-Electro-Mechanical Systems (MEMS) Mirror
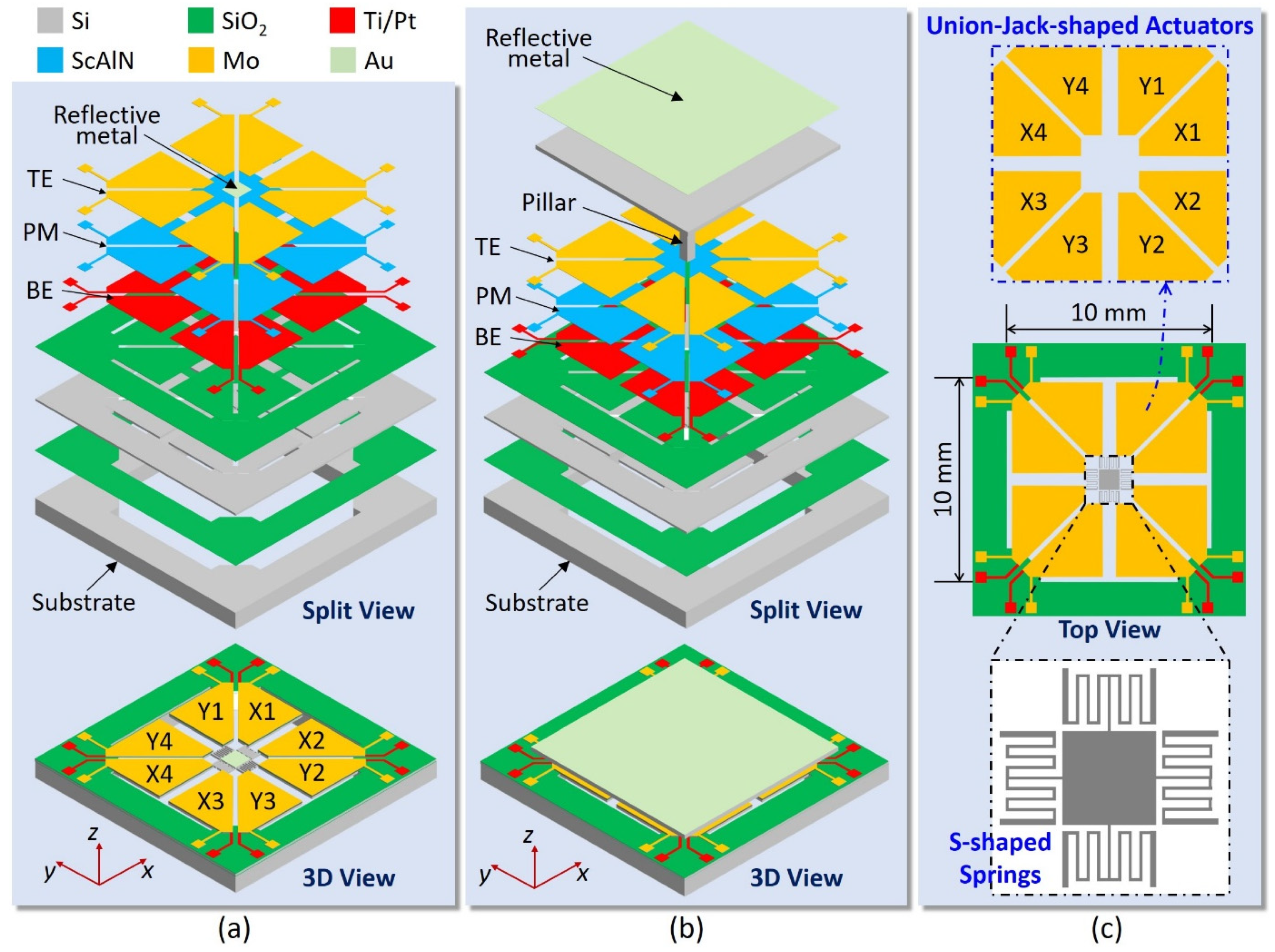
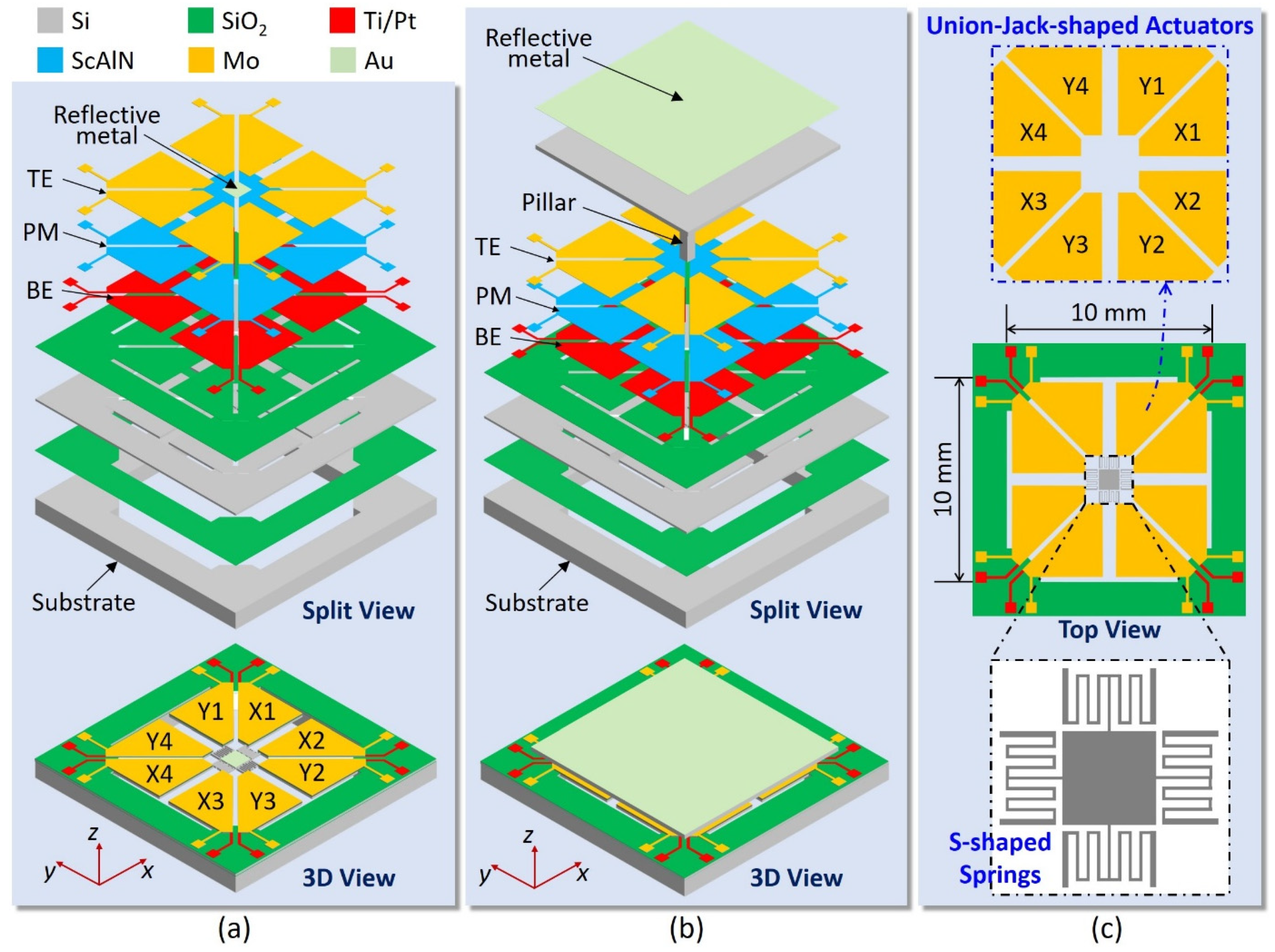
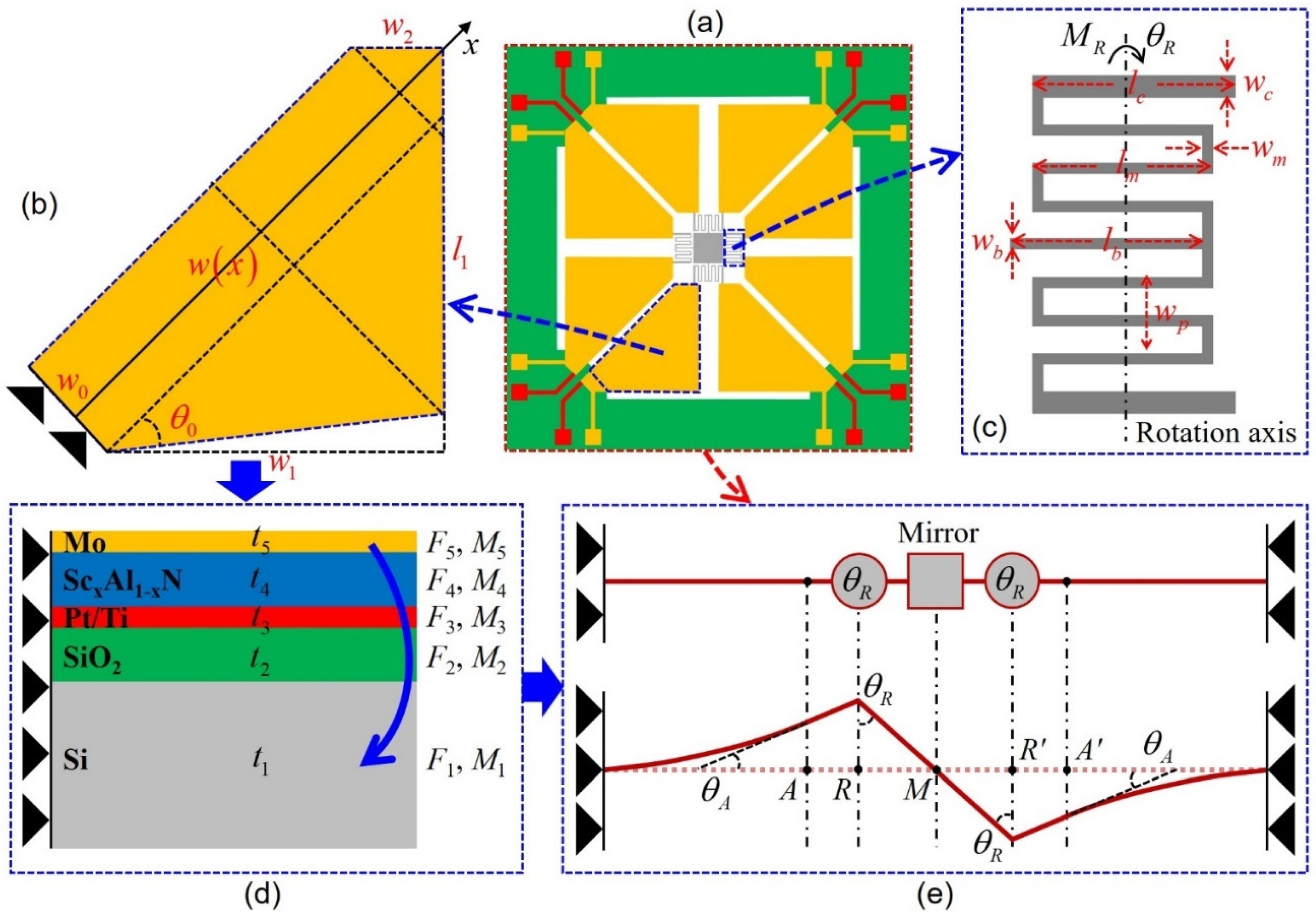
2.1. MEMS Mirror Structure
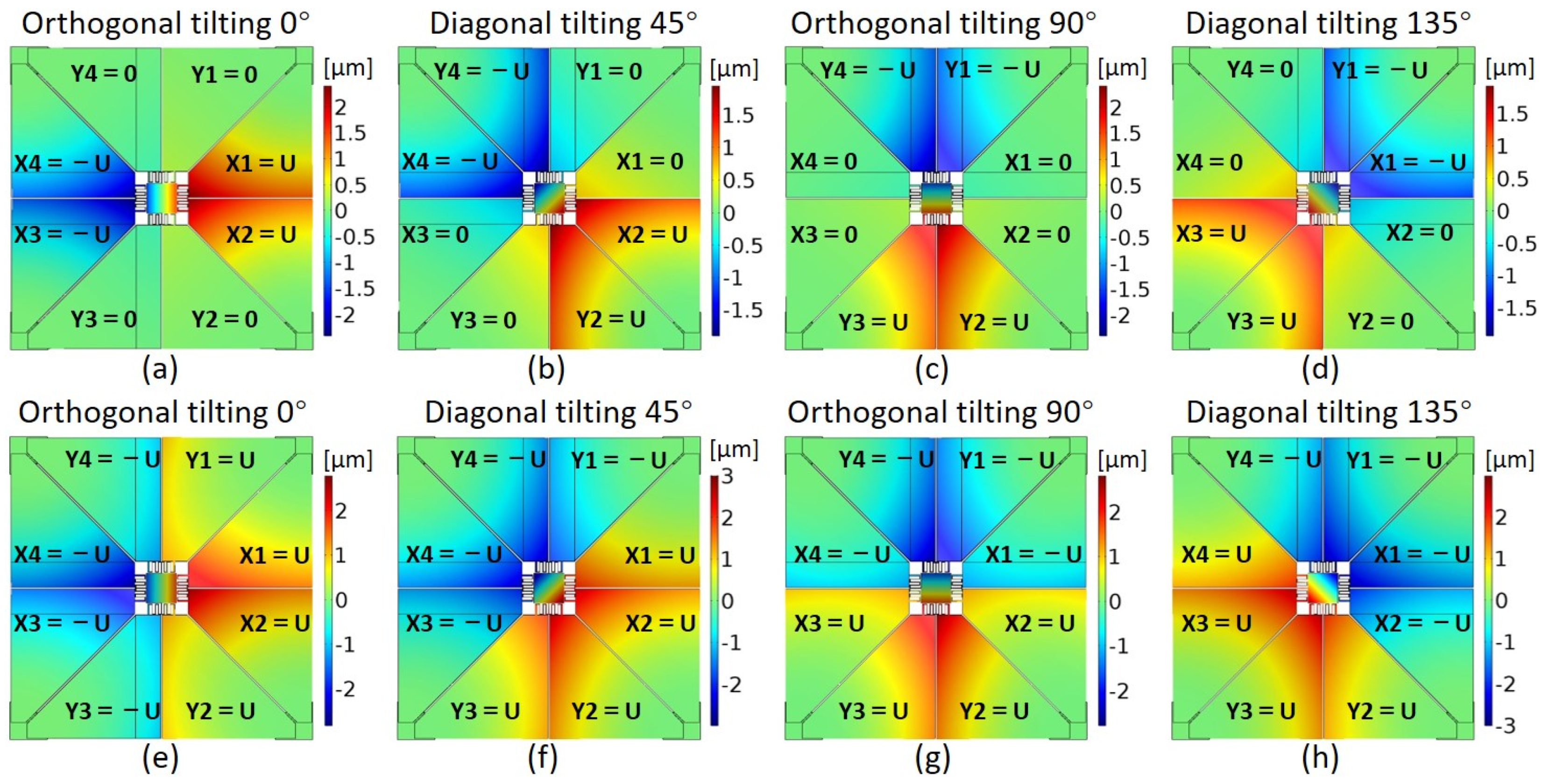
2.2. Actuation Principle
3. Modeling and Analysis
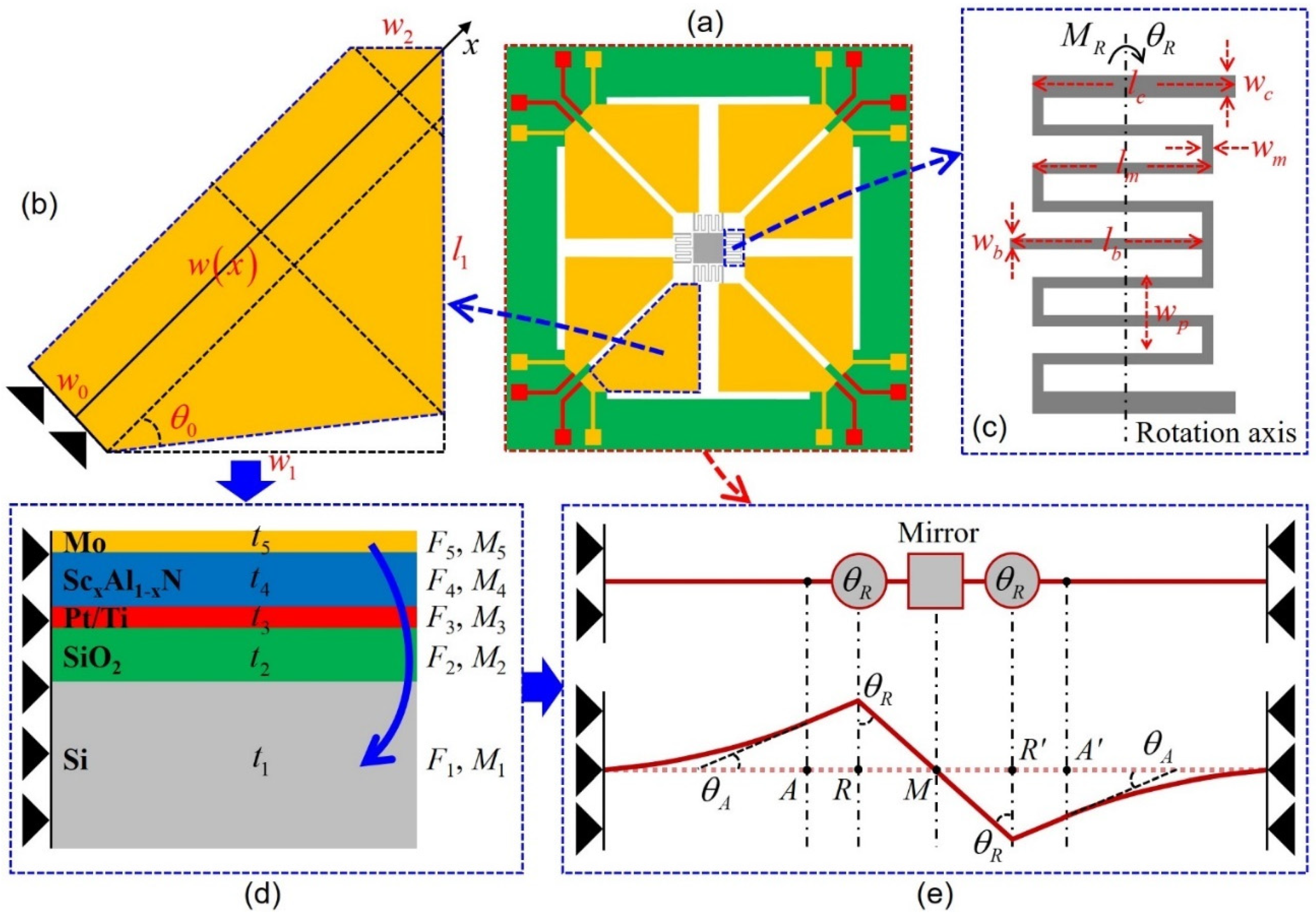
3.1. Analytical Model of the Static Behavior Multilayer Trapezoidal Actuator
3.2. Analytical Model of the Dynamic Behavior Multilayer Trapezoidal Actuator
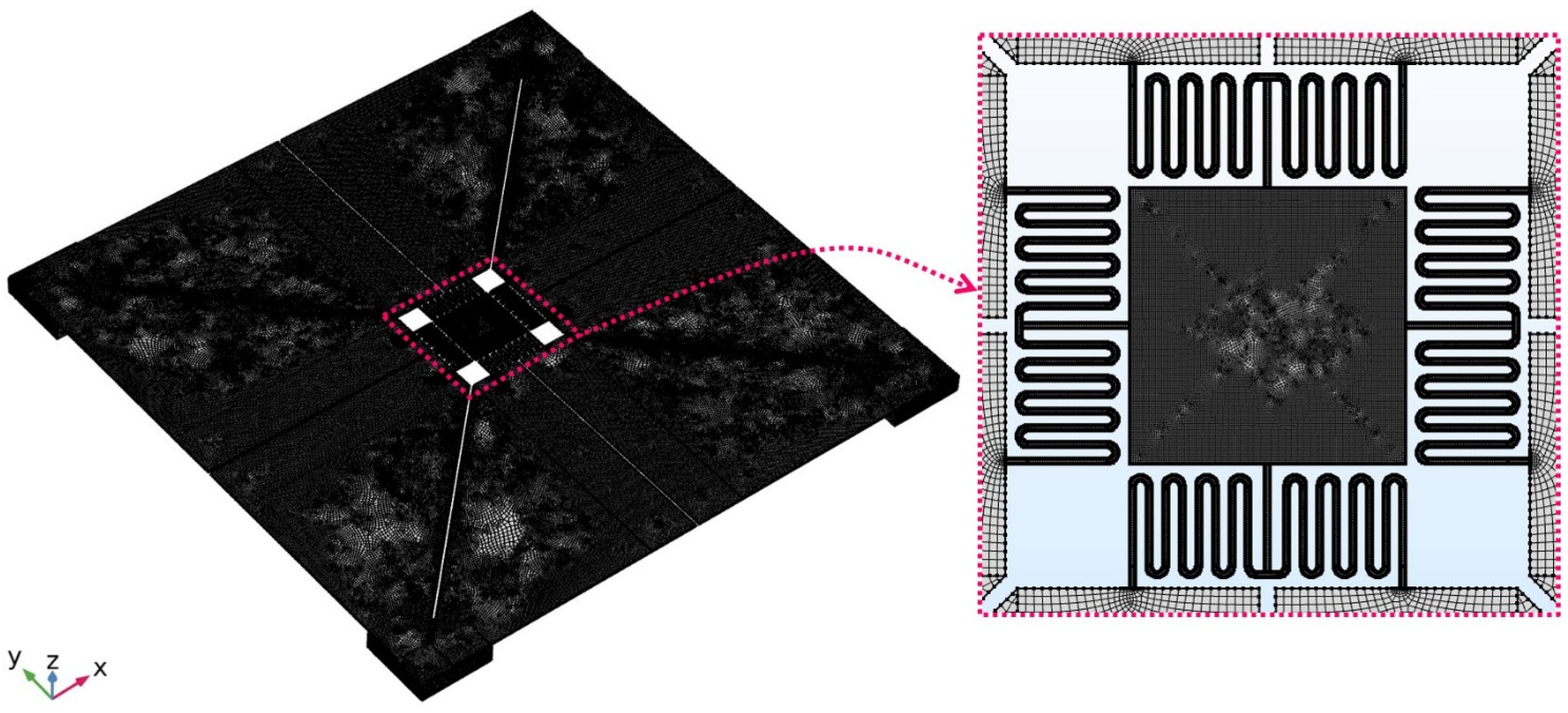
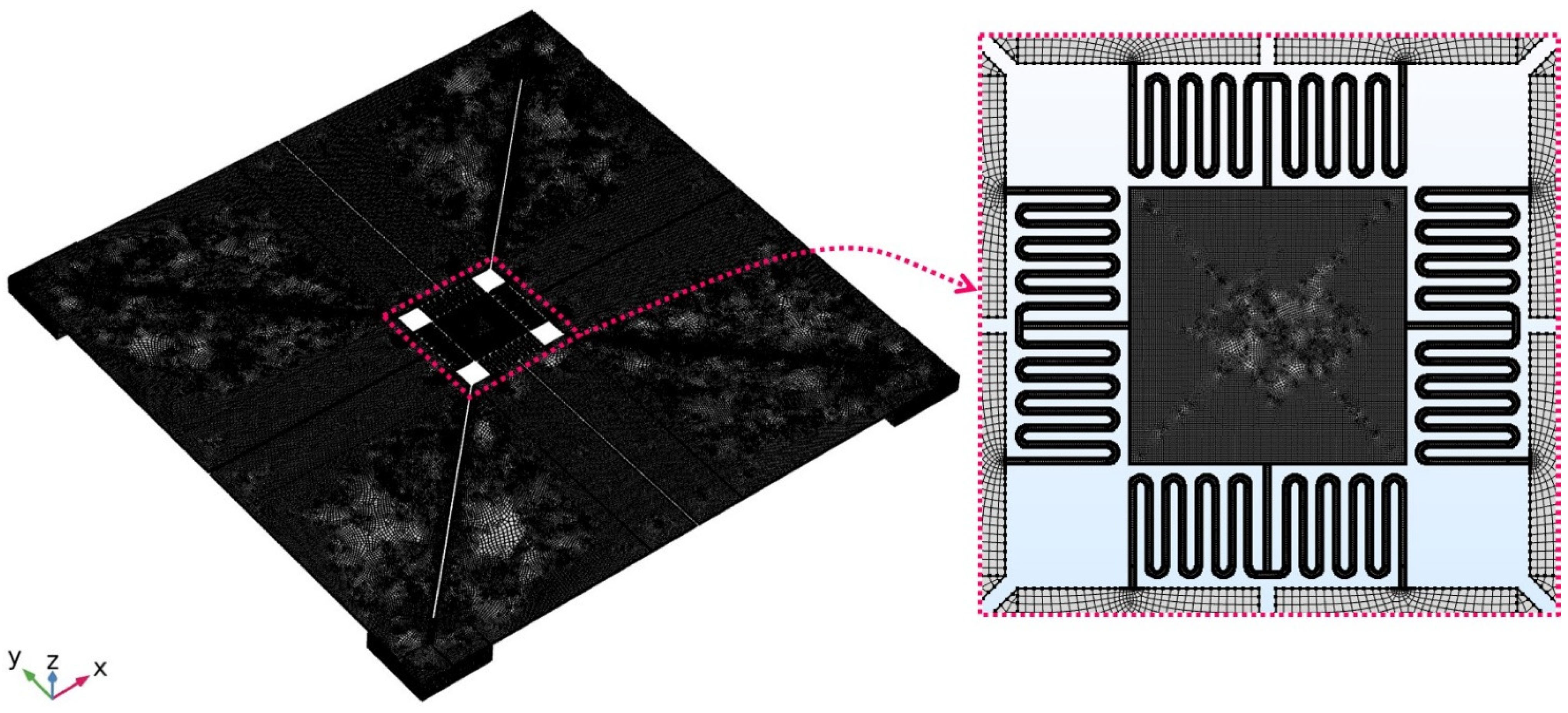
4. Three-Dimensional (3D) Finite-Element Modeling (FEM) Simulation, Optimization and Discussion
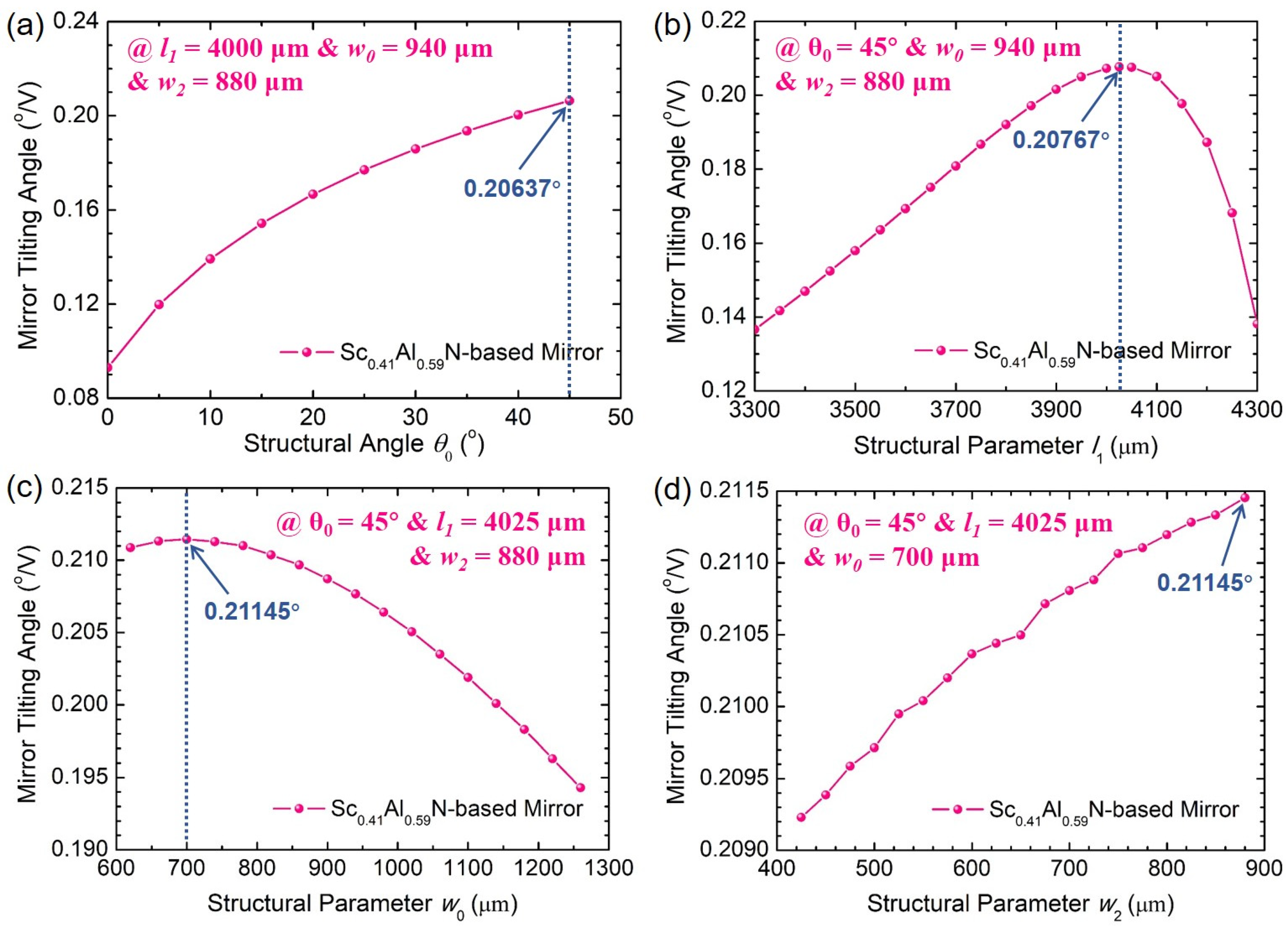
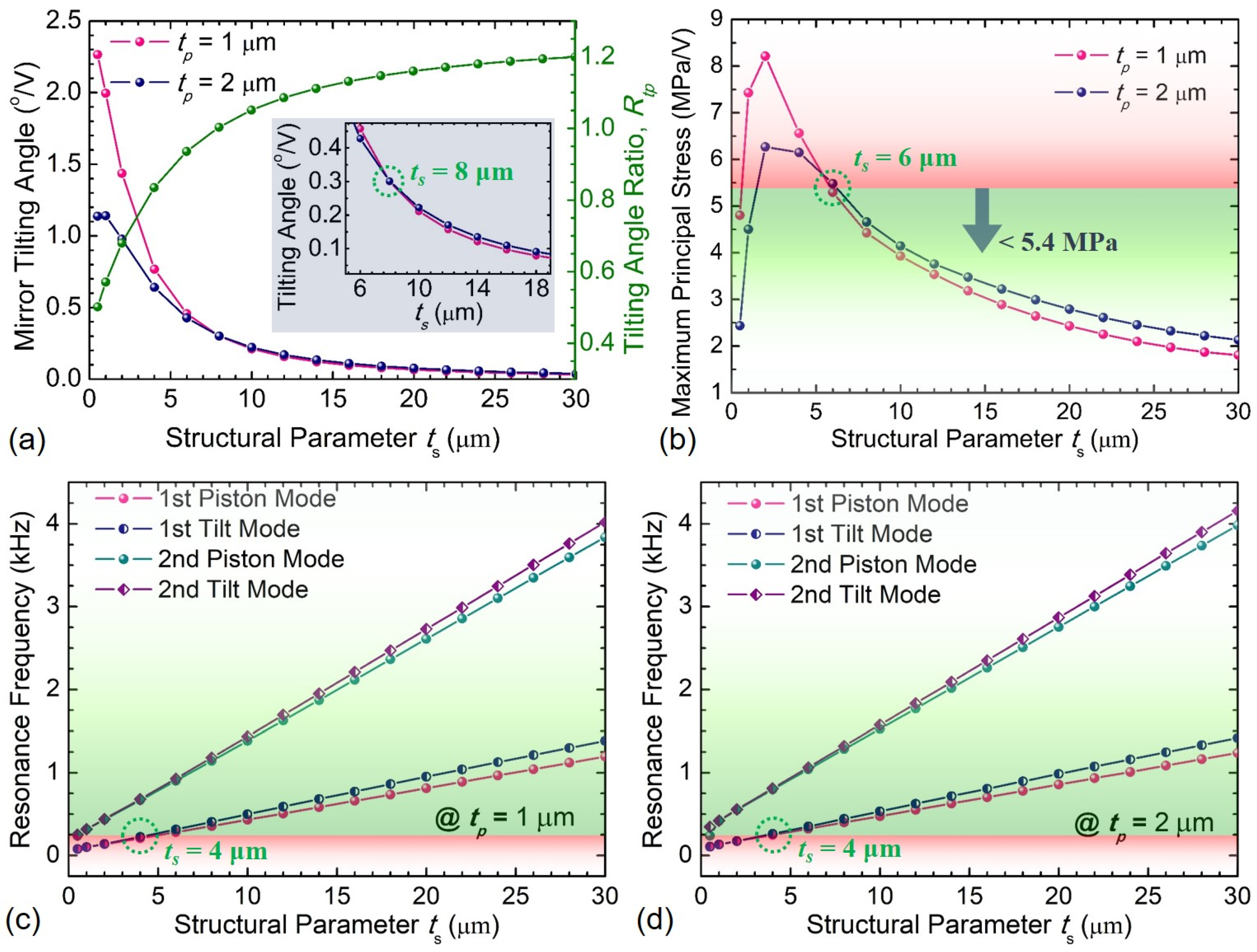
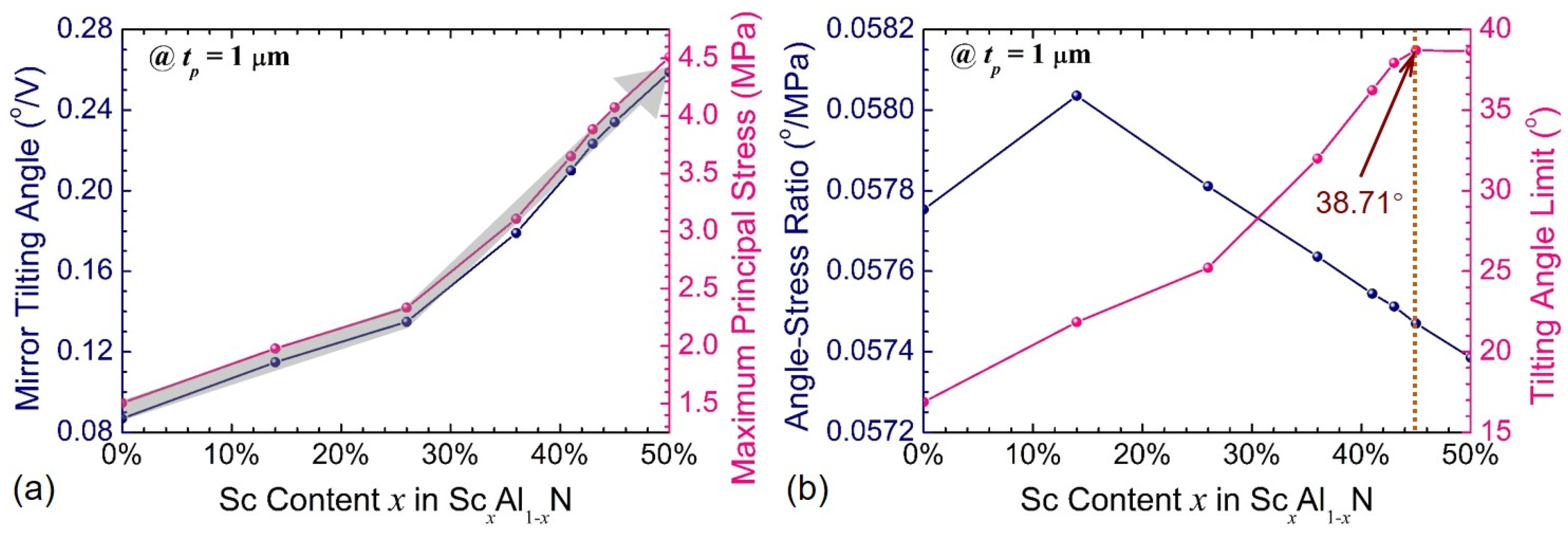
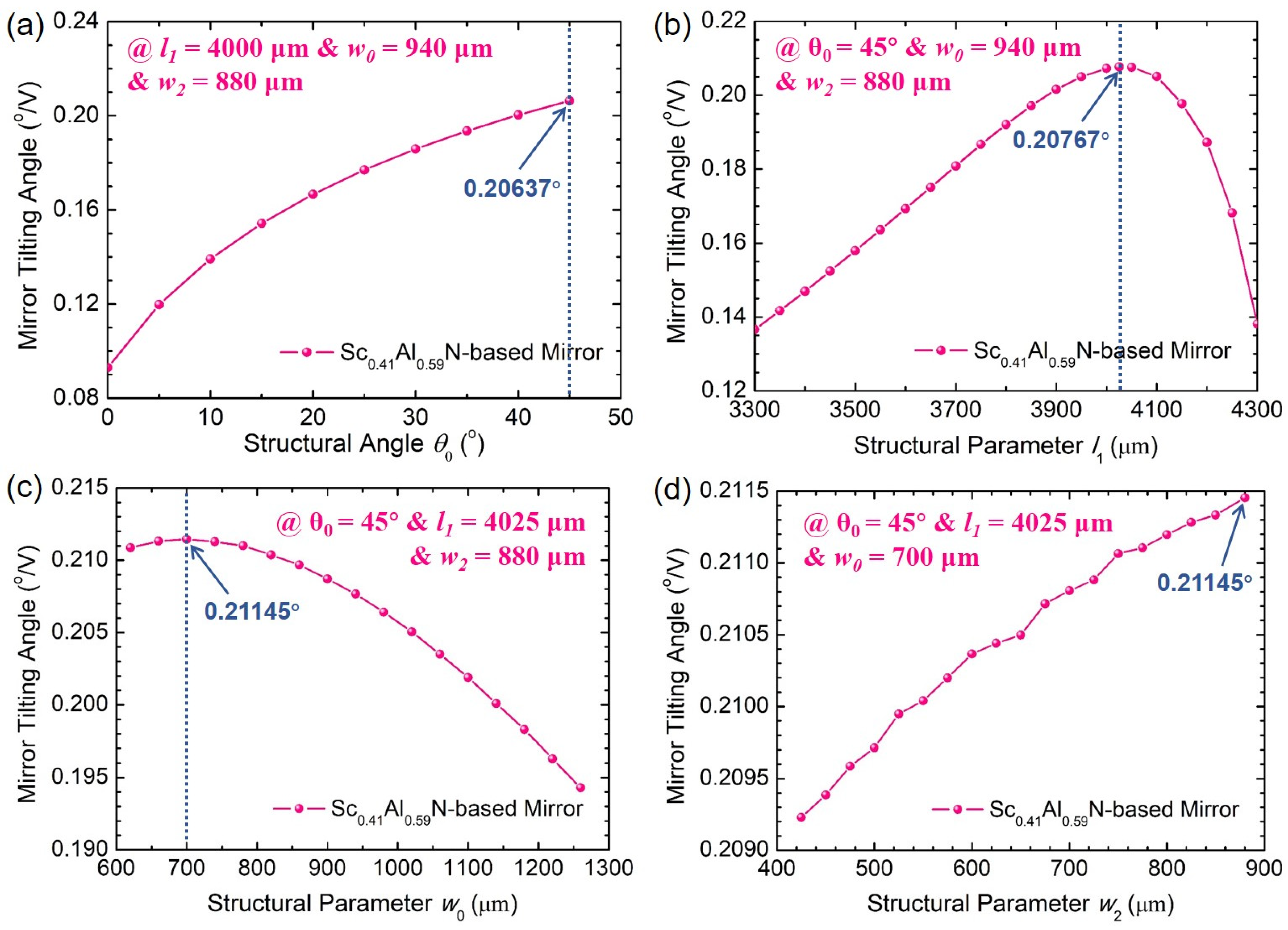
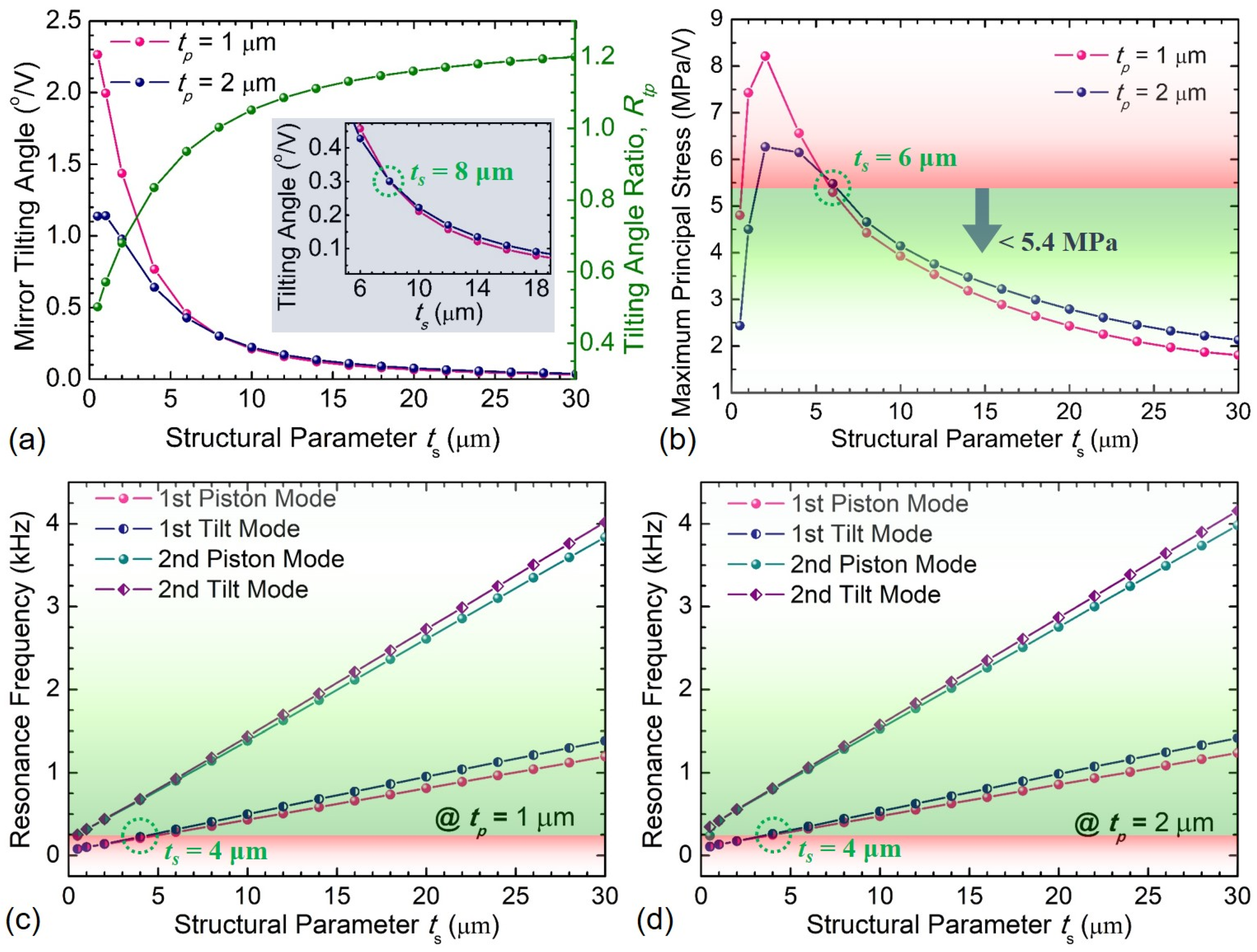
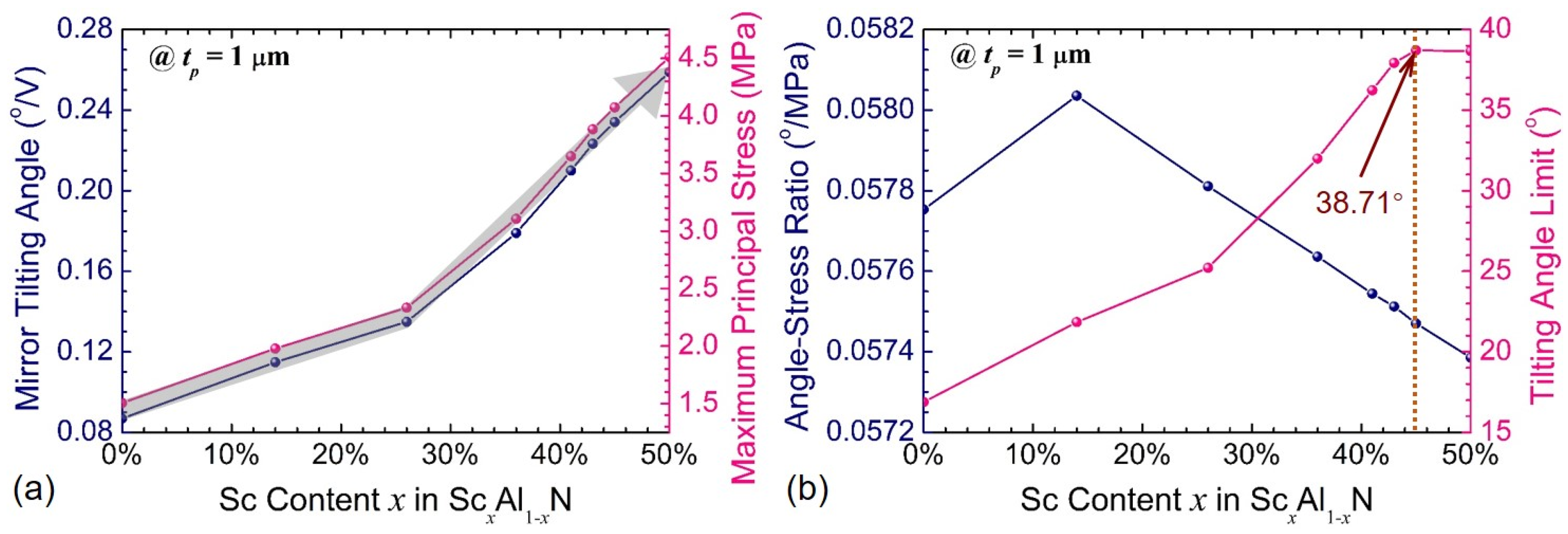
4.1. Structure Optimization
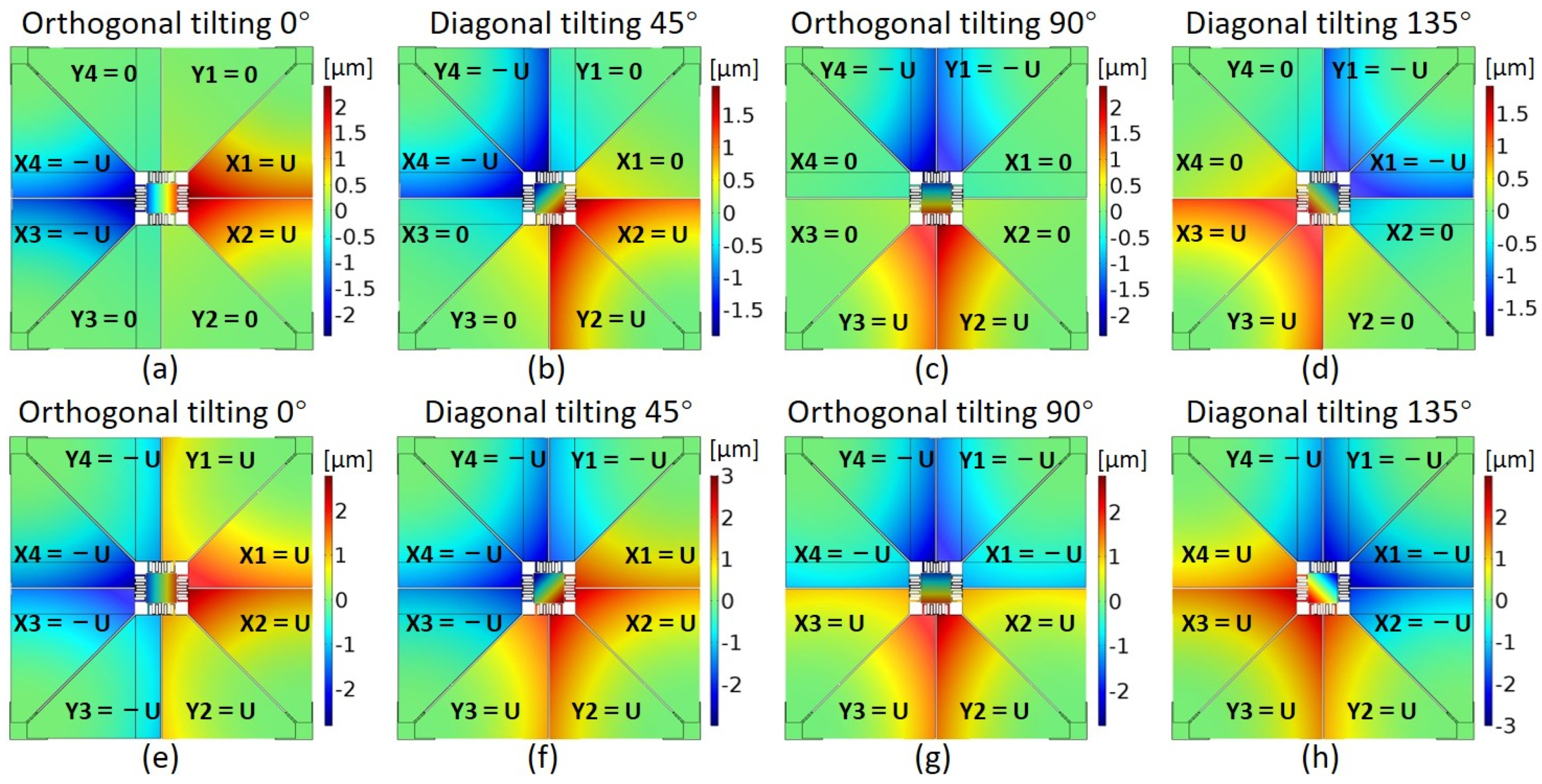
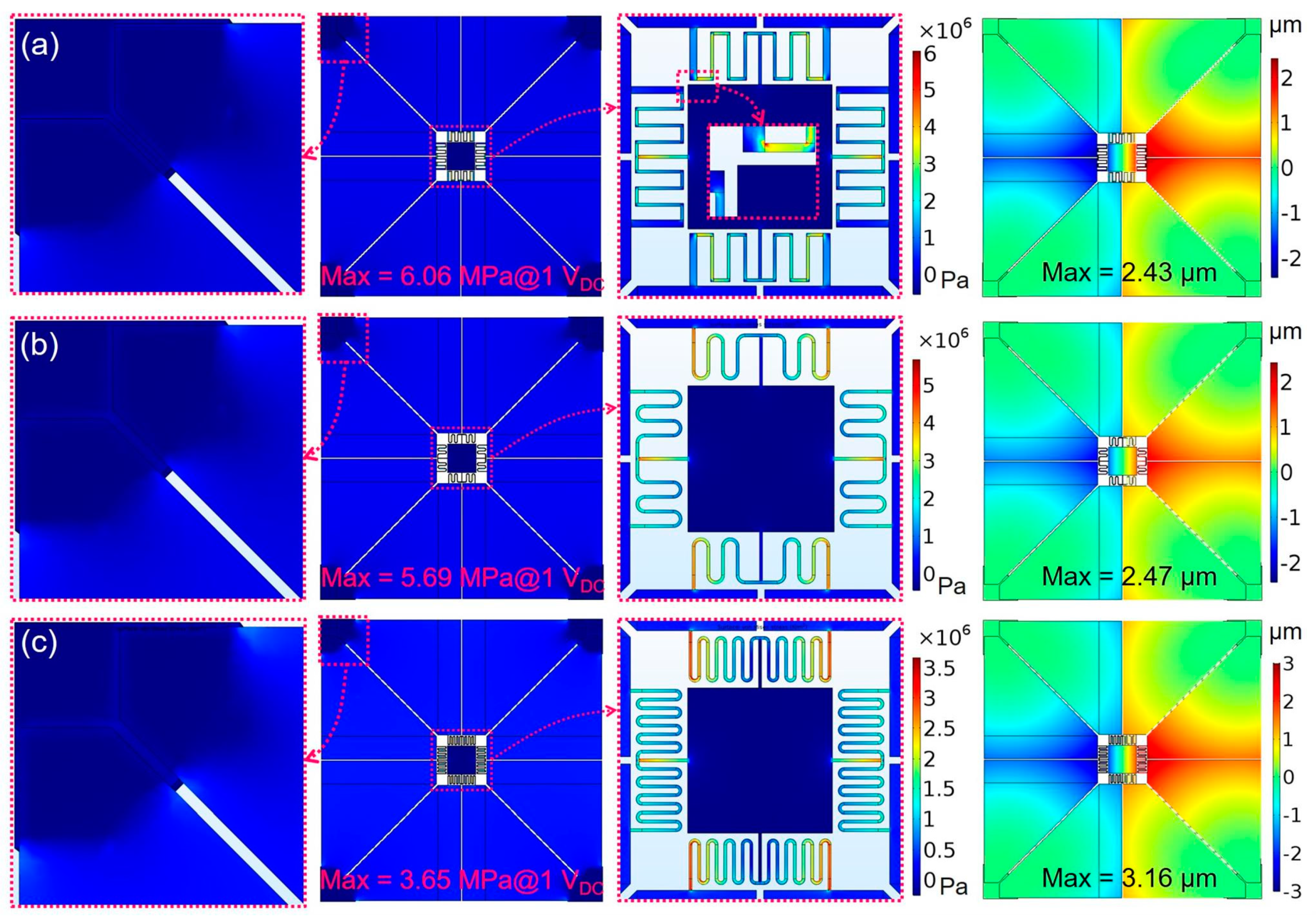
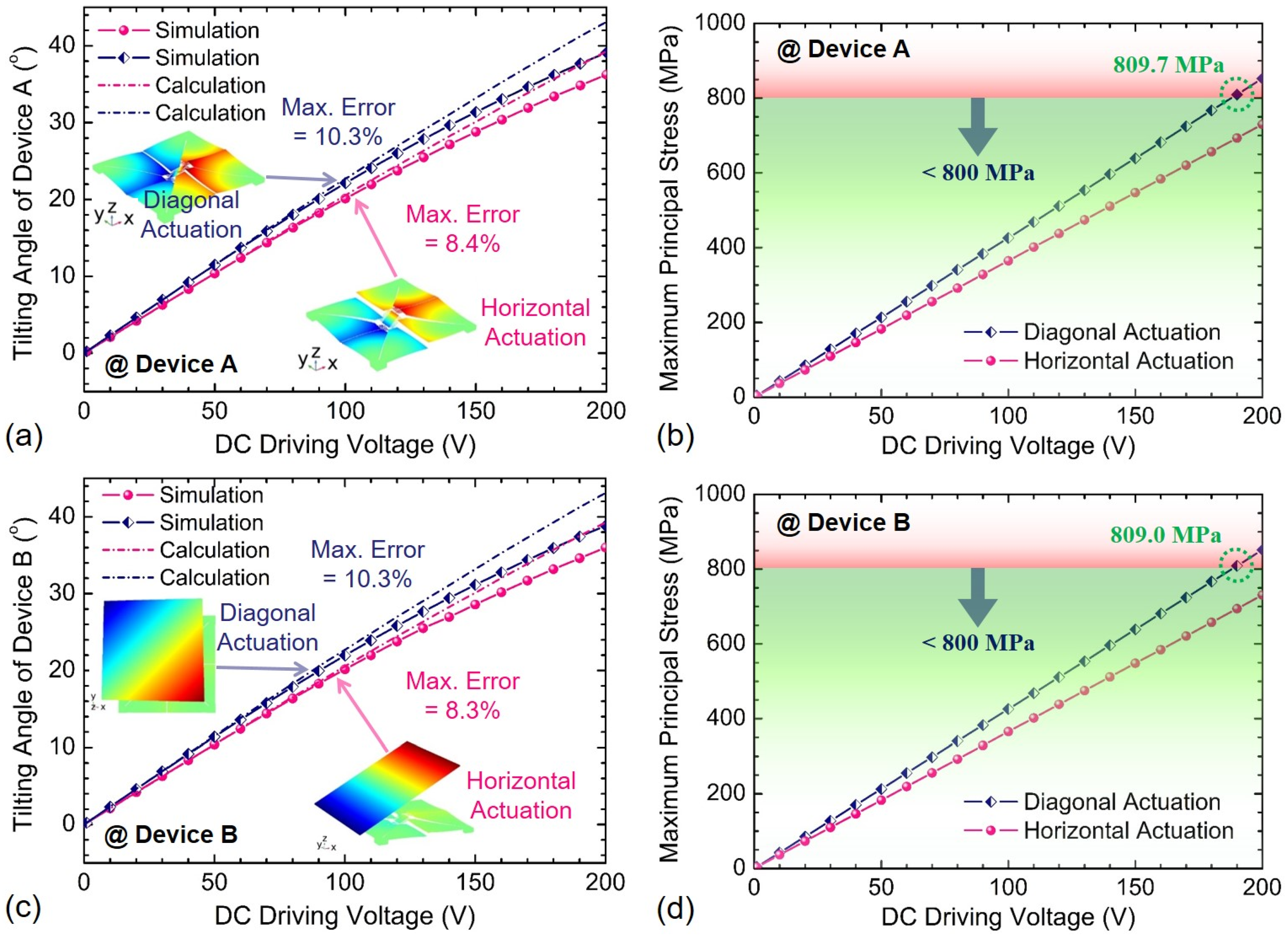
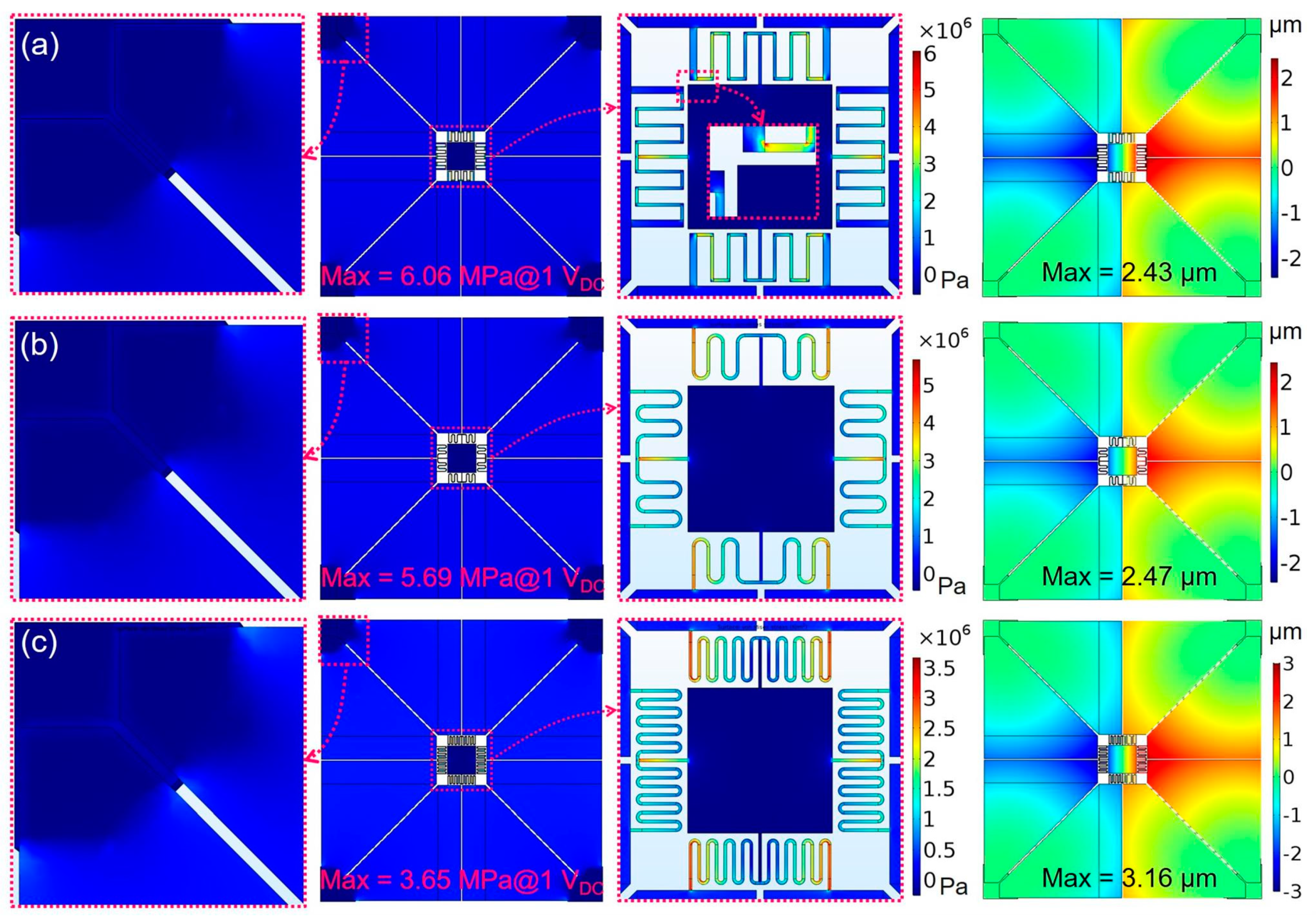
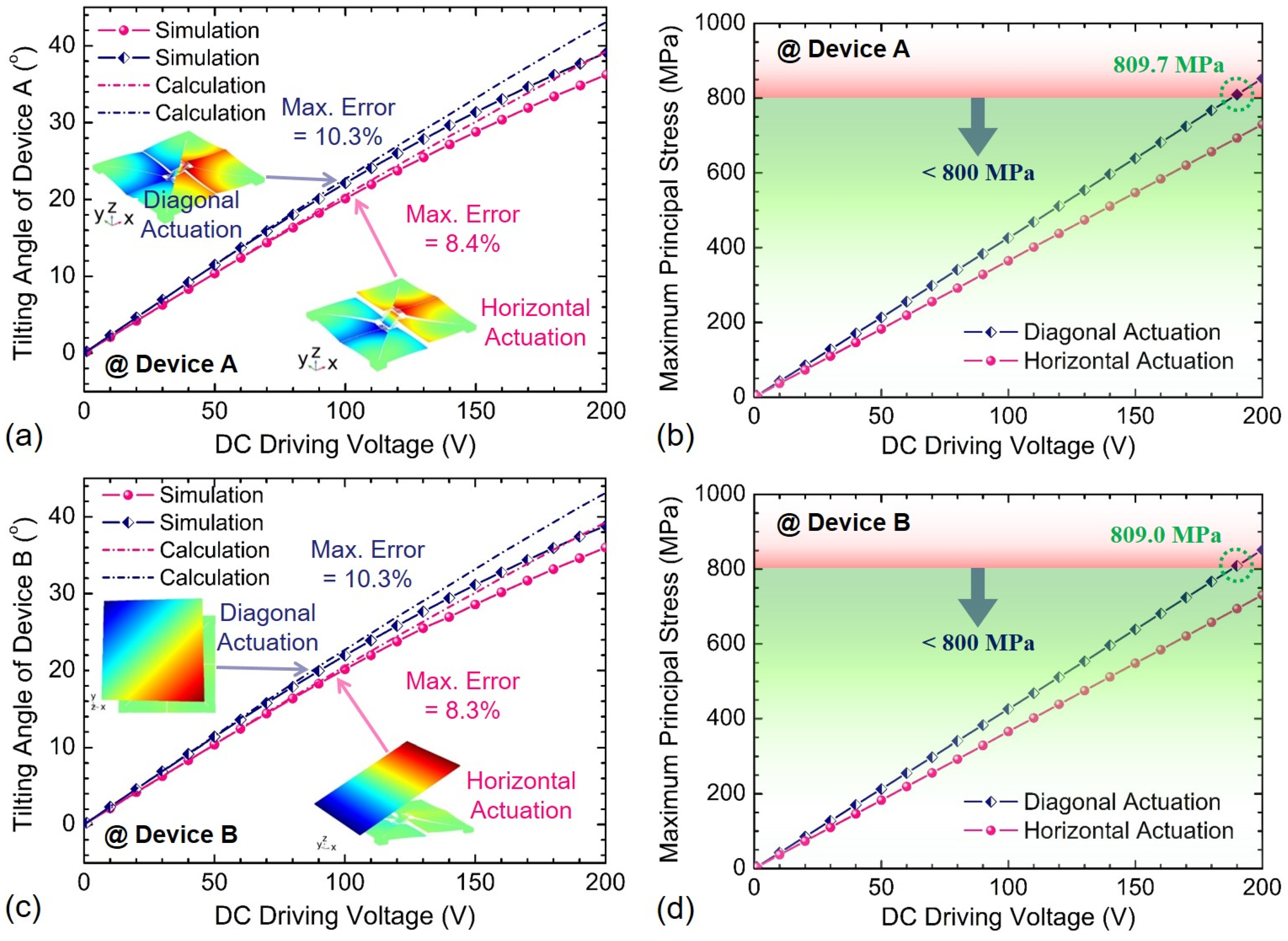
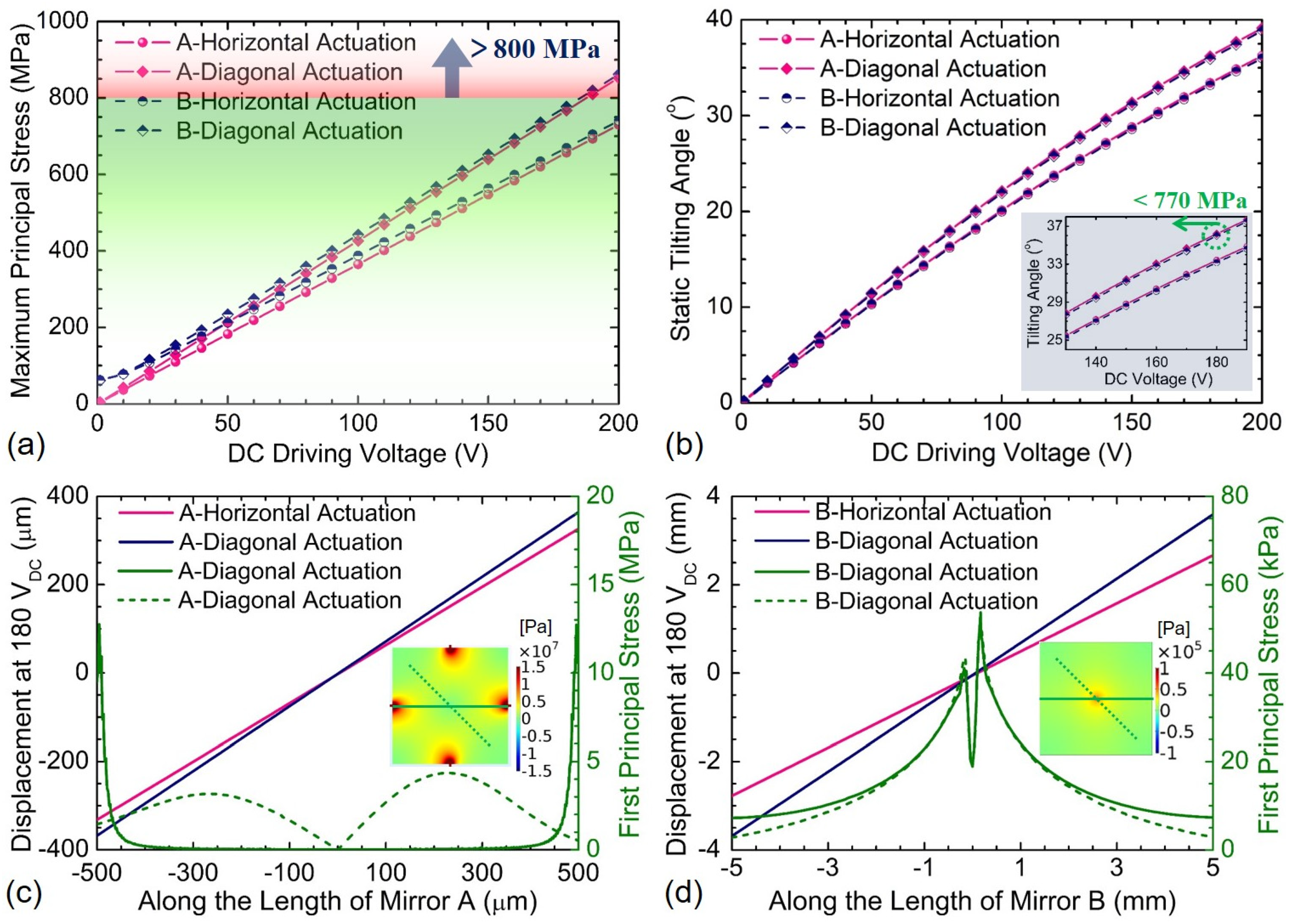
4.2. Static Actuation
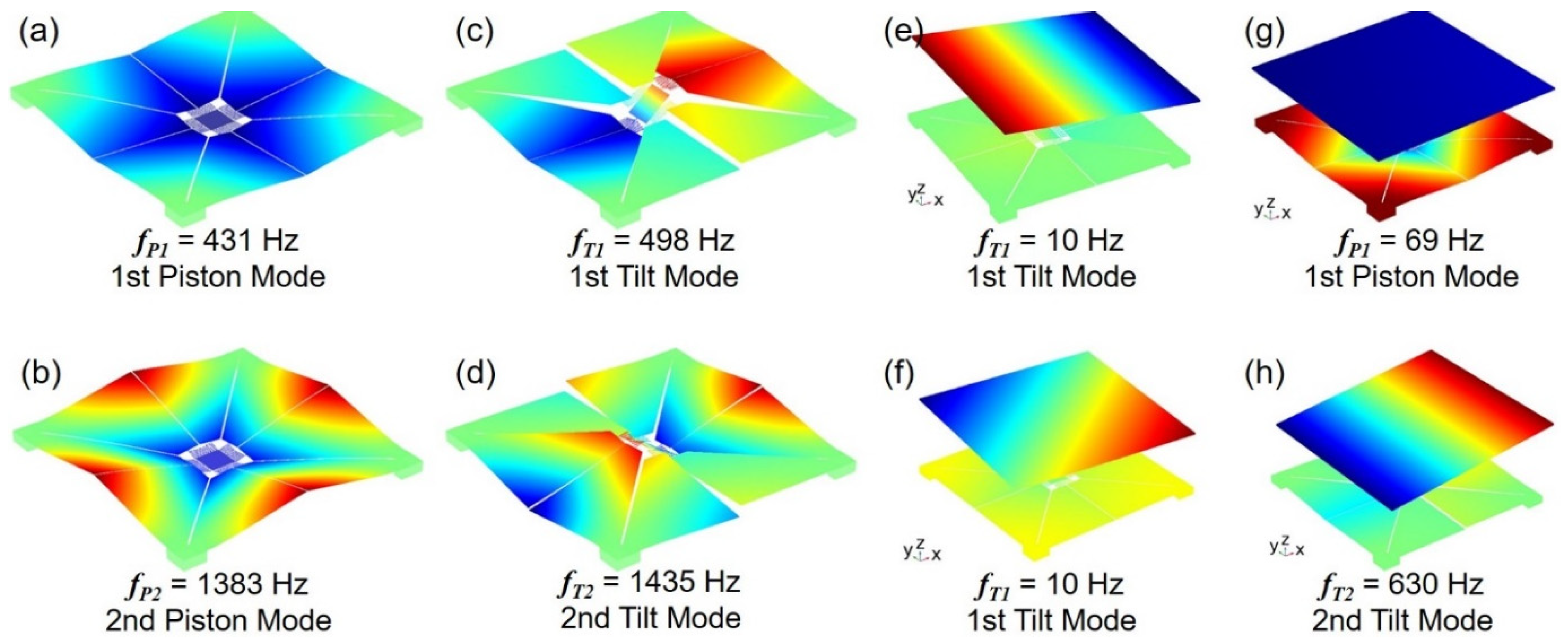
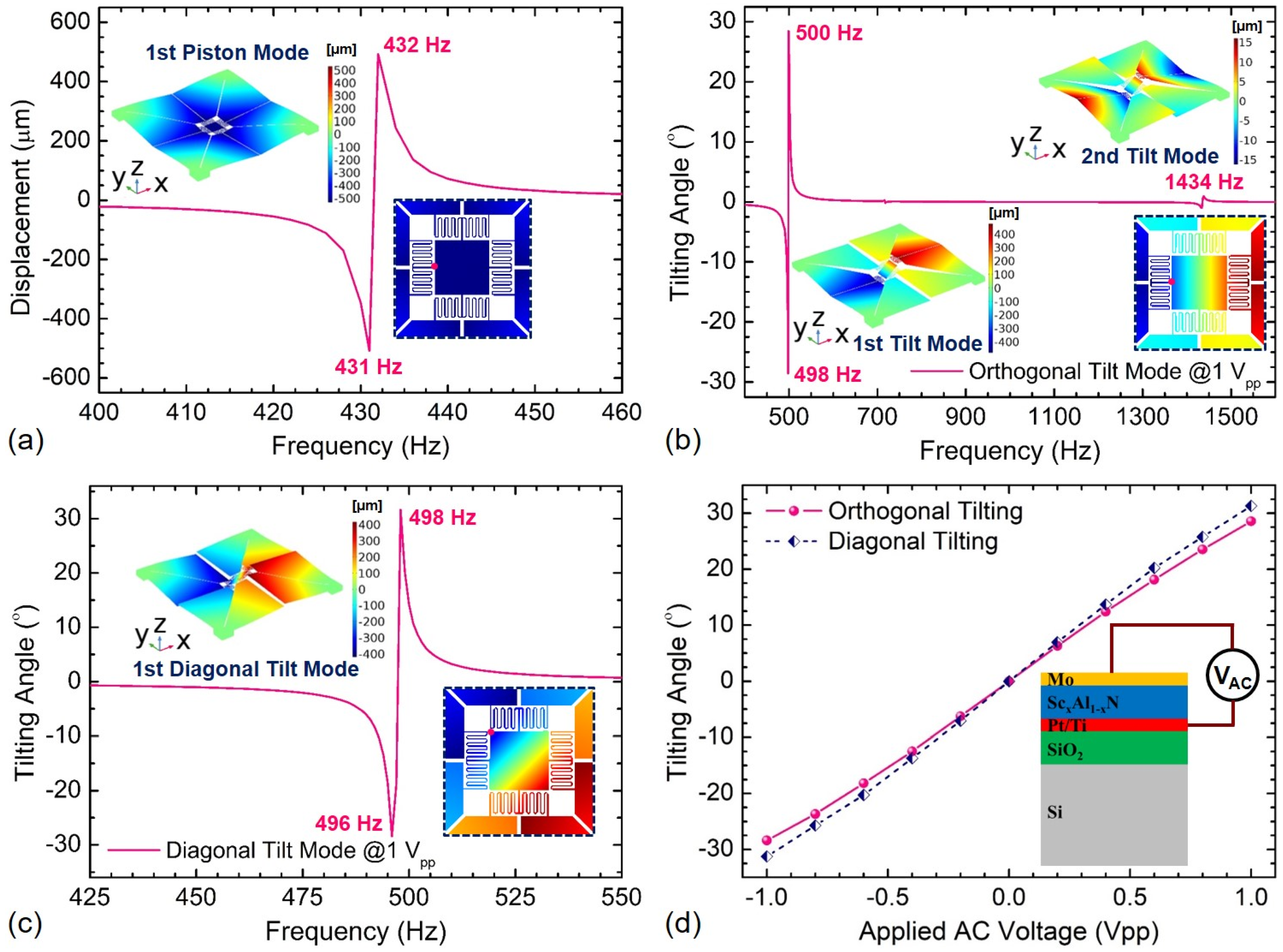
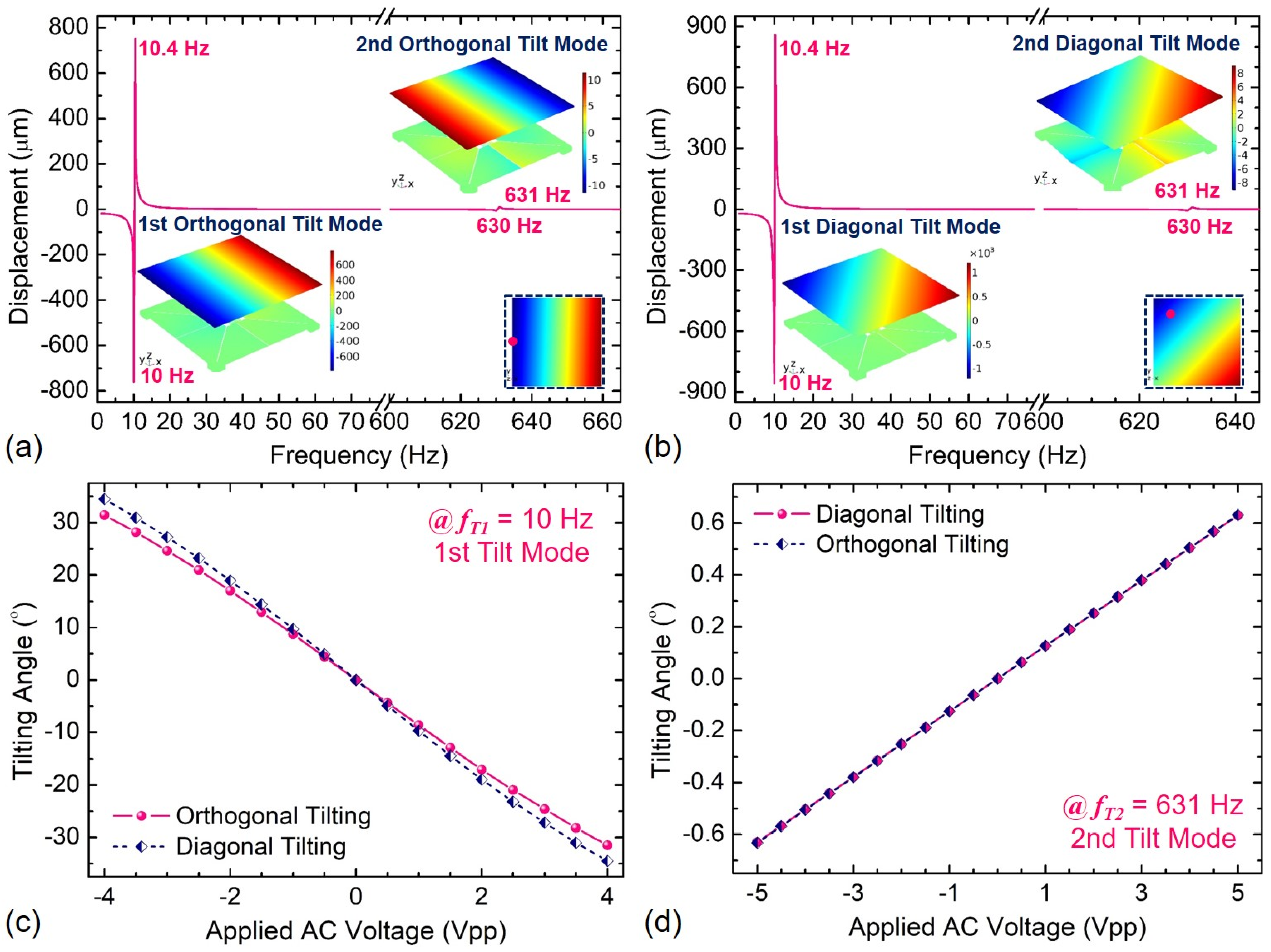
4.3. Dynamic Actuation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Holmstrom, S.T.S.; Baran, U.; Urey, H. MEMS Laser Scanners: A Review. J. Microelectromech. Syst. 2014, 23, 259–275. [Google Scholar] [CrossRef]
- Pollock, C.; Morrison, J.; Imboden, M.; Little, T.D.; Bishop, D.J. Beam shaping with tip-tilt varifocal mirror for indoor optical wireless communication. Opt. Express 2017, 25, 20274–20285. [Google Scholar] [CrossRef]
- Sato, K.; Okutsu, K. Basic Characteristics of a Micromechanical Optical Switch Using an S-Shaped Deformable Thin-Film Mirror. J. Lightwave Technol. 2011, 29, 2805–2811. [Google Scholar] [CrossRef]
- Baran, U.; Brown, D.; Holmstrom, S.; Balma, D.; Davis, W.O.; Muralt, P.; Urey, H. Resonant PZT MEMS Scanner for High-Resolution Displays. J. Microelectromech. Syst. 2012, 21, 1303–1310. [Google Scholar] [CrossRef] [Green Version]
- Lin, L.Y.; Keeler, E.G. Progress of MEMS Scanning Micromirrors for Optical Bio-Imaging. Micromachines 2015, 6, 1675–1689. [Google Scholar] [CrossRef] [Green Version]
- Wolter, A.; Hsu, S.-T.; Schenk, H.; Lakner, H.K. Applications and requirements for MEMS scanner mirrors. In Proceedings of the SPIE 5719, MOEMS and Miniaturized Systems V, San Jose, CA, USA, 25–26 January 2005; pp. 64–75. [Google Scholar]
- Wu, L.; Xie, H. Large-aperture, rapid scanning MEMS micromirrors for free-space optical communications. In Proceedings of the IEEE/LEOS International Conference on Optical MEMS and Nanophotonics 2009, Clearwater, FL, USA, 17–20 August 2009; pp. 131–132. [Google Scholar]
- Ye, L.; Zhang, G.; You, Z. Large-Aperture kHz Operating Frequency Ti-alloy Based Optical Micro Scanning Mirror for LiDAR Application. Micromachines 2017, 8, 120. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, J.; Zhong, S.; Wu, Y. Large size MEMS scanning mirror with vertical com drive for tunable optical filter. Opt. Laser. Eng. 2013, 51, 54–60. [Google Scholar] [CrossRef]
- Jung, I.W.; Krishnamoorthy, U.; Solgaard, O. High Fill-Factor Two-Axis Gimbaled Tip-Tilt-Piston Micromirror Array Actuated by Self-Aligned Vertical Electrostatic Combdrives. J. Microelectromech. Syst. 2006, 15, 563–571. [Google Scholar] [CrossRef]
- Gu-Stoppel, S.; Lisce, T.; Fichtner, S.; Funck, N.; Claus, M.; Wagner, B.; Lofink, F. AlScN based MEMS quasi-static mirror matrix with large tilting angle and high linearity. Sens. Actuators A Phys. 2020, 312, 112107. [Google Scholar] [CrossRef]
- Zhang, W.; Li, P.; Zhang, X.; Wang, Y.; Hu, F. InGaN/GaN micro mirror with electrostatic comb drive actuation integrated on a patterned silicon-on-insulator wafer. Opt. Express 2018, 26, 7672–7682. [Google Scholar] [CrossRef]
- Alneamy, A.; Khater, M.; Al-Ghamdi, M.; Park, S.; Heppler, G.; Abdel-Rahman, E.M. Dual Actuation Micro-mirrors. J. Micromech. Microeng. 2018, 28, 075014. [Google Scholar] [CrossRef]
- Tan, J.; Sun, W.; Yeow, J. Internal Model-Based Robust Tracking Control Design for the MEMS Electromagnetic Micromirror. Sensors 2017, 17, 1215. [Google Scholar] [CrossRef] [Green Version]
- Tanguy, Q.A.A.; Bargiel, S.; Xie, H.; Passilly, N.; Barthès, M.; Gaiffe, O.; Rutkowski, J.; Lutz, P.; Gorecki, C. Design and Fabrication of a 2-Axis Electrothermal MEMS Micro-Scanner for Optical Coherence Tomography. Micromachines 2017, 8, 146. [Google Scholar] [CrossRef]
- Chen, S.-H.; Michael, A.; Kwok, C.Y. Design and Modeling of Piezoelectrically Driven Micro-Actuator with Large Out-of-Plane and Low Driving Voltage for Micro-Optics. J. Microelectromech. Syst. 2019, 28, 919–932. [Google Scholar] [CrossRef]
- Tsai, J.; Lu, L.; Hsu, W.; Sun, C.; Wu, M.C. Linearization of a two-axis MEMS scanner driven by vertical comb-drive actuators. J. Micromech. Microeng. 2008, 18, 015015. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.; Liu, W.; Chen, Q.; Xu, N.; Sun, Q.; Liu, Y.; Xie, H. A mems variable optical attenuator based on a vertical comb drive with self-elevated stators. Sens. Actuators A Phys. 2017, 271, 398–408. [Google Scholar] [CrossRef]
- Song, Y.; Panas, R.M.; Hopkins, J.B. A review of micromirror arrays. Precis. Eng. 2017, 51, 729–761. [Google Scholar] [CrossRef]
- Li, G.; Zuo, P.; Xie, W.; Yeow, J.T.W. Dynamic modeling of a polymer composite based hard-magnetic micro-mirror. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 8362–8367. [Google Scholar]
- Shao, J.; Li, Q.; Feng, C.; Li, W.; Yu, H. AlN based piezoelectric micromirror. Opt. Lett. 2018, 43, 987–990. [Google Scholar] [CrossRef] [PubMed]
- Meinel, K.; Stoeckel, C.; Melzer, M.; Zimmermann, S.; Forke, R.; Hiller, K.; Otto, T. Piezoelectric scanning micromirror with built-in sensors based on thin film aluminum nitride. IEEE Sens. J. 2020, 21, 9682–9689. [Google Scholar] [CrossRef]
- Meinel, K.; Melzer, M.; Stoeckel, C.; Shaporin, A.; Forke, R.; Zimmermann, S.; Hiller, K.; Otto, T.; Kuhn, H. 2D Scanning Micromirror with Large Scan Angle and Monolithically Integrated Angle Sensors Based on Piezoelectric Thin Film Aluminum Nitride. Sensors 2020, 20, 6599. [Google Scholar] [CrossRef] [PubMed]
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent trends in piezoelectric actuators for precision motion and their applications: A review. Smart Mater. Struct. 2021, 30, 013002. [Google Scholar] [CrossRef]
- Lei, H.; Wen, Q.; Yu, F.; Li, D.; Shang, Z.; Huang, J.; Wen, Z. AlN film based piezoelectric large-aperture MEMS scanning micromirror integrated with angle sensors. J. Micromech. Microeng. 2018, 28, 115012. [Google Scholar] [CrossRef]
- Mayrhofer, P.M.; Rehlendt, C.; Fischeneder, M.; Kucera, M.; Wistrela, E.; Bittner, A.; Schmid, U. ScAlN MEMS Cantilevers for Vibrational Energy Harvesting Purposes. J. Microelectromech. Syst. 2017, 26, 102–112. [Google Scholar] [CrossRef]
- Caro, M.A.; Zhang, S.; Riekkinen, T.; Ylilammi, M.; Moram, M.A.; Lopez-Acevedo, O.; Molarius, J.; Laurila, T. Piezoelectric coefficients and spontaneous polarization of ScAlN. J. Phys. Condens. Matter 2015, 27, 279602. [Google Scholar] [CrossRef]
- Gu-Stoppel, S.; Lisec, T.; Claus, M.; Funck, N.; Fichtner, S.; Schröder, S.; Wagner, B.; Lofink, F. A triple-wafer-bonded AlScN driven quasi-static MEMS mirror with high linearity and large tilt angles. In Proceedings of the SPIE MOEMS and Miniaturized Systems XIX, San Francisco, CA, USA, 28 February 2020; p. 1129304. [Google Scholar]
- Gu-Stoppel, S.; Lisec, T.; Fichtner, S.; Funck, N.; Eisermann, C.; Lofink, F.; Wagner, B.; Müller-Groeling, A. A highly linear piezoelectric quasi-static MEMS mirror with mechanical tilt angles of larger than 10°. In Proceedings of the SPIE MOEMS and Miniaturized Systems XVIII, San Francisco, CA, USA, 4 March 2019; p. 1093102. [Google Scholar]
- Sun, C.; Li, B.; Su, W.; Liu, Y.; Wu, Y. Modeling and Optimization of ScAlN-based MEMS Mirror with Large Static Two-axis Tilting Angle. In Proceedings of the 16th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Xiamen, China, 25–29 April 2021; pp. 704–708. [Google Scholar]
- Li, F.; Zhou, P.; Wang, T.; He, J.; Yu, H.; Shen, W. A Large-Size MEMS Scanning Mirror for Speckle Reduction Application. Micromachines 2017, 8, 140. [Google Scholar] [CrossRef] [Green Version]
- Akiyama, M.; Umeda, K.; Honda, A.; Nagase, T. Influence of scandium concentration on power generation figure of merit of scandium aluminum nitride thin films. Appl. Phys. Lett. 2013, 102, 021915. [Google Scholar] [CrossRef]
- Barth, S.; Bartzsch, H.; Gloess, D.; Frach, P.; Herzog, T.; Walter, S.; Heuer, H. Sputter deposition of stress-controlled piezoelectric AlN and ScAlN films for ultrasonic and energy harvesting applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 1329–1334. [Google Scholar] [CrossRef] [PubMed]
- Ballas, R.G. Piezoelectric Multilayer Beam Bending Actuators: Static and Dynamic Behavior and Aspects of Sensor Integration; Springer: Berlin, Germany, 2007; pp. 47–121. [Google Scholar]
- Timoshenko, S.P.; Weaver, W.; Young, D.H. Vibration Problems in Engineering, 5th ed.; John Wiley & Sons: New York, NY, USA, 1990; pp. 1–107. [Google Scholar]
- Akiyama, M.; Kano, K.; Teshigahara, A. Influence of growth temperature and scandium concentration on piezoelectric response of scandium aluminum nitride alloy thin films. Appl. Phys. Lett. 2009, 95, 162107. [Google Scholar] [CrossRef]
- Fichtner, S.; Wolff, N.; Krishnamurthy, G.; Petraru, A.; Bohse, S.; Lofink, F.; Chemnitz, S.; Kohlstedt, H.; Kienle, L.; Wagner, B. Identifying and overcoming the interface originating c-axis instability in highly Sc enhanced AlN for piezoelectric micro-electromechanical systems. J. Appl. Phys. 2017, 122, 035301. [Google Scholar] [CrossRef]
- Mertin, S.; Heinz, B.; Rattunde, O.; Christmann, G.; Dubois, M.-A.; Nicolay, S.; Muralt, P. Piezoelectric and structural properties of c-axis textured aluminium scandium nitride thin films up to high scandium content. Surf. Coat. Tech. 2018, 343, 2–6. [Google Scholar] [CrossRef]
- Wang, H.; Lv, Y.; Wang, C.; Wang, X.; He, C.; Xue, C.; He, S. Simulation Analysis and Performance Testing Investigation of Capacitive Micromachined Ultrasonic Transducer. Int. J. Pattern Recogn. 2018, 32, 1858004. [Google Scholar] [CrossRef]
- Michael, A.; Kwok, C.Y. Piezoelectric micro-lens actuator. Sens. Actuators A Phys. 2015, 236, 116–129. [Google Scholar] [CrossRef]
- Akiyama, M.; Kamohara, T.; Kano, K.; Teshigahara, A.; Takeuchi, Y.; Kawahara, N. Enhancement of piezoelectric response in scandium aluminum nitride alloy thin films prepared by dual reactive cosputtering. Adv. Mater. 2009, 21, 593–596. [Google Scholar] [CrossRef] [PubMed]
- Jing, Z.; Xu, M.; Feng, B. Modeling and optimization of a novel two-axis mirror-scanning mechanism driven by piezoelectric actuators. Smart Mater. Struct. 2015, 24, 025002. [Google Scholar] [CrossRef]
- Koh, K.H.; Kobayashi, T.; Lee, C. Investigation of piezoelectric driven MEMS mirrors based on single and double S-shaped PZT actuator for 2-D scanning applications. Sens. Actuators A Phys. 2012, 184, 149–159. [Google Scholar] [CrossRef]
- Lee, C.; Hsiao, F.-L.; Kobayashi, T.; Koh, K.H.; Ramana, P.V.; Xiang, W.; Yang, B.; Tan, C.W.; Pinjala, D. A 1-V Operated MEMS Variable Optical Attenuator Using Piezoelectric PZT Thin-Film Actuators. IEEE J. Sel. Top. Quant. 2009, 15, 1529–1536. [Google Scholar]
- Ye, L.; Zhang, G.; You, Z. 5 V Compatible Two-Axis PZT Driven MEMS Scanning Mirror with Mechanical Leverage Structure for Miniature LiDAR Application. Sensors 2017, 17, 521. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance | Sc0.41Al0.59N [11,27,32] | AlN [11,26] | PZT [11,26] |
|---|---|---|---|
| Material Category | Non-ferroelectric | Ferroelectric | |
| Piezoelectric Coefficient, [C/m2] | ~3.16 | ~1.1 | ~21 |
| Relative Permittivity, | 16.7 | 10 | 1300 |
| Figure of Merit (FoM), [GPa] | 67.5 | 13.7 | 38.3 |
| Highest DC Driving Voltage [V] | ±200 | ±200 | ±30 |
| Directionality | Bidirectional | Unidirectional | |
| CMOS compatibility | Yes | No | |
| Parameter | Device A | Device B |
|---|---|---|
| Mirror length, lA or lB [μm] | 1000 | 10,000 |
| Thickness of the mirror plate, tA or tB [μm] | 10 | 100 |
| Length of the pillar, lp [μm] | - | 250 |
| Height of the pillar, hp [μm] | - | 3500 |
| Length of the PM actuator, l1 [μm] | 4025 | |
| Fixed boundary width of the PM actuator, w0 [μm] | 700 | |
| Lower width of the PM actuator, w1 [μm] | 3035 | |
| Upper width of the PM actuator, w2 [μm] | 880 | |
| Length of the meandering spring, lm [μm] | 370 | |
| Width of the meandering spring, wm [μm] | 20 | |
| Spacing pitch of the meandering spring, wp [μm] | 120 | |
| Length of the torsion bar, lb [μm] | 390 | |
| Width of the torsion bar, wb [μm] | 20 | |
| Length of the connecting bar, lc [μm] | 410 | |
| Width of the connecting bar, wc [μm] | 20 | |
| Parameter | Si | SiO2 | Pt | Mo | Au |
|---|---|---|---|---|---|
| Young’s Modulus [GPa] | 170 | 70 | 168 | 312 | 70 |
| Poisson’s Ratio | 0.28 | 0.17 | 0.38 | 0.31 | 0.44 |
| Density [kg/m3] | 2329 | 2200 | 21,450 | 10,200 | 19,300 |
| Relative Permittivity | 11.7 | 4.2 | - | - | - |
| Piezoelectric Mirrors | Material | Mirror Size, D [mm] | Tilt Angle, θ [°/V] | Maximum Angle, θmax [°] | θ·D [°·mm/V] |
|---|---|---|---|---|---|
| Device A | ScAlN | 1 | 0.2011 | ±36.2 @180 V | 0.201 |
| Device B | ScAlN | 10 | 0.1999 | ±36.0 @180 V | 1.999 |
| Ref. [11] | ScAlN | 0.8 | 0.0933 | ±14.00 @150 V | 0.075 |
| Ref. [21] | AlN | 0.2 | 0.005 | ±0.15 @30 V | 0.001 |
| Ref. [42] | Bulk PZT | 20 | 0.0224 | 3.14 @120 V | 0.449 |
| Ref. [43] | PZT | 2 | 0.46 | 4.60 @10 V | 0.920 |
| Ref. [44] | PZT | 2 | 0.3 | 5.10 @17 V | 0.600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, C.; Liu, Y.; Li, B.; Su, W.; Luo, M.; Du, G.; Wu, Y. Modeling and Optimization of a Novel ScAlN-Based MEMS Scanning Mirror with Large Static and Dynamic Two-Axis Tilting Angles. Sensors 2021, 21, 5513. https://doi.org/10.3390/s21165513
Sun C, Liu Y, Li B, Su W, Luo M, Du G, Wu Y. Modeling and Optimization of a Novel ScAlN-Based MEMS Scanning Mirror with Large Static and Dynamic Two-Axis Tilting Angles. Sensors. 2021; 21(16):5513. https://doi.org/10.3390/s21165513
Chicago/Turabian StyleSun, Changhe, Yufei Liu, Bolun Li, Wenqu Su, Mingzhang Luo, Guofeng Du, and Yaming Wu. 2021. "Modeling and Optimization of a Novel ScAlN-Based MEMS Scanning Mirror with Large Static and Dynamic Two-Axis Tilting Angles" Sensors 21, no. 16: 5513. https://doi.org/10.3390/s21165513
APA StyleSun, C., Liu, Y., Li, B., Su, W., Luo, M., Du, G., & Wu, Y. (2021). Modeling and Optimization of a Novel ScAlN-Based MEMS Scanning Mirror with Large Static and Dynamic Two-Axis Tilting Angles. Sensors, 21(16), 5513. https://doi.org/10.3390/s21165513