
Overcome the Brightness and Jitter Noises in Video Inter-Frame Tampering Detection


Abstract
1. Introduction
2. Related Work
2.1. Methods without Considering Noises
2.2. Methods Considering Noises
3. Preliminaries
3.1. Horn and Schunck (H&S) Method
3.2. Robust Optical Flow Algorithm against Brightness Changes
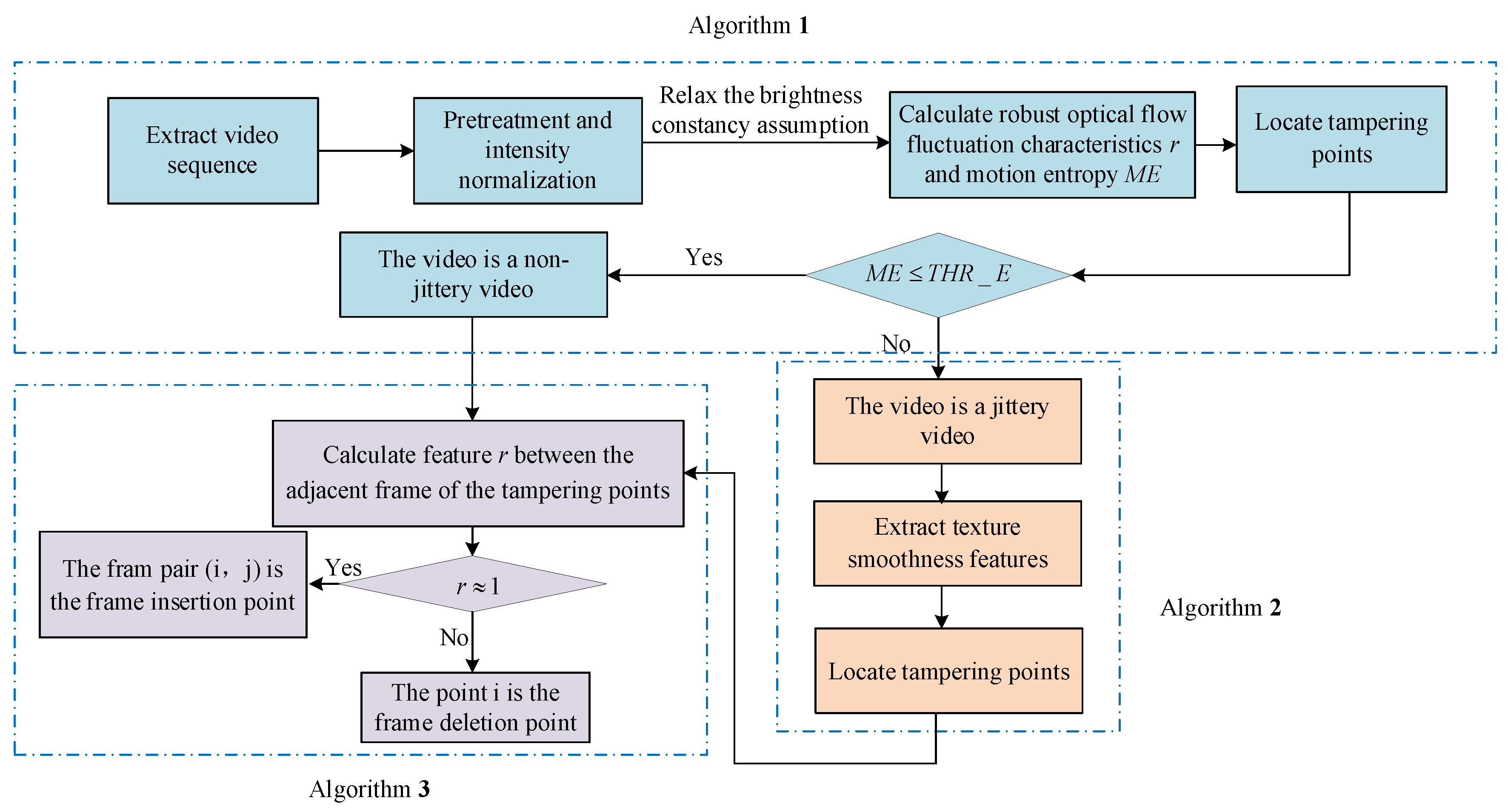
4. Method
4.1. Algorithm 1: Reduce the Impact of Illumination Changes
| Algorithm 1: Reduce the impact of illumination changes |
| as threshold selected for peak point, |
| . |
| Output: store position of suspicious tampering point in S. |
| , C = 0 //C is the variable counter for peak point |
| do |
| then |
| 7: end if |
| 8: end for |
| 11: (a) return FORGED VIDEO |
| 14: else run Algorithm 2 |
| 15: end if |
| 16:else return ORIGINAL VIDEO |
| 17:end if |
4.2. Algorithm 2 Detects Jittery Video
| Algorithm 2: Detection algorithm based on video texture changes fraction |
| as threshold selected for peak point |
| in Algorithm 1 |
| do |
| then |
| 7: end if |
| 8: end for |
| then |
| 10: (a) return FORGED VIDEO |
| 12:else return ORIGINAL VIDEO |
| 13:end if |
4.3. Algorithm 3: Make the Judgement of Video Tamper
| Algorithm 3: judgment of video tamper |
| Input:suspicious tampering point set in S, the variable counter for peak point C |
| do |
| do |
| : |
| 6: else: |
| : |
| 10: end if |
| 11: end if |
| 12: end for |
| 13: end for |
5. Evaluation of Optical Flow Computation
5.1. Experimental Setup
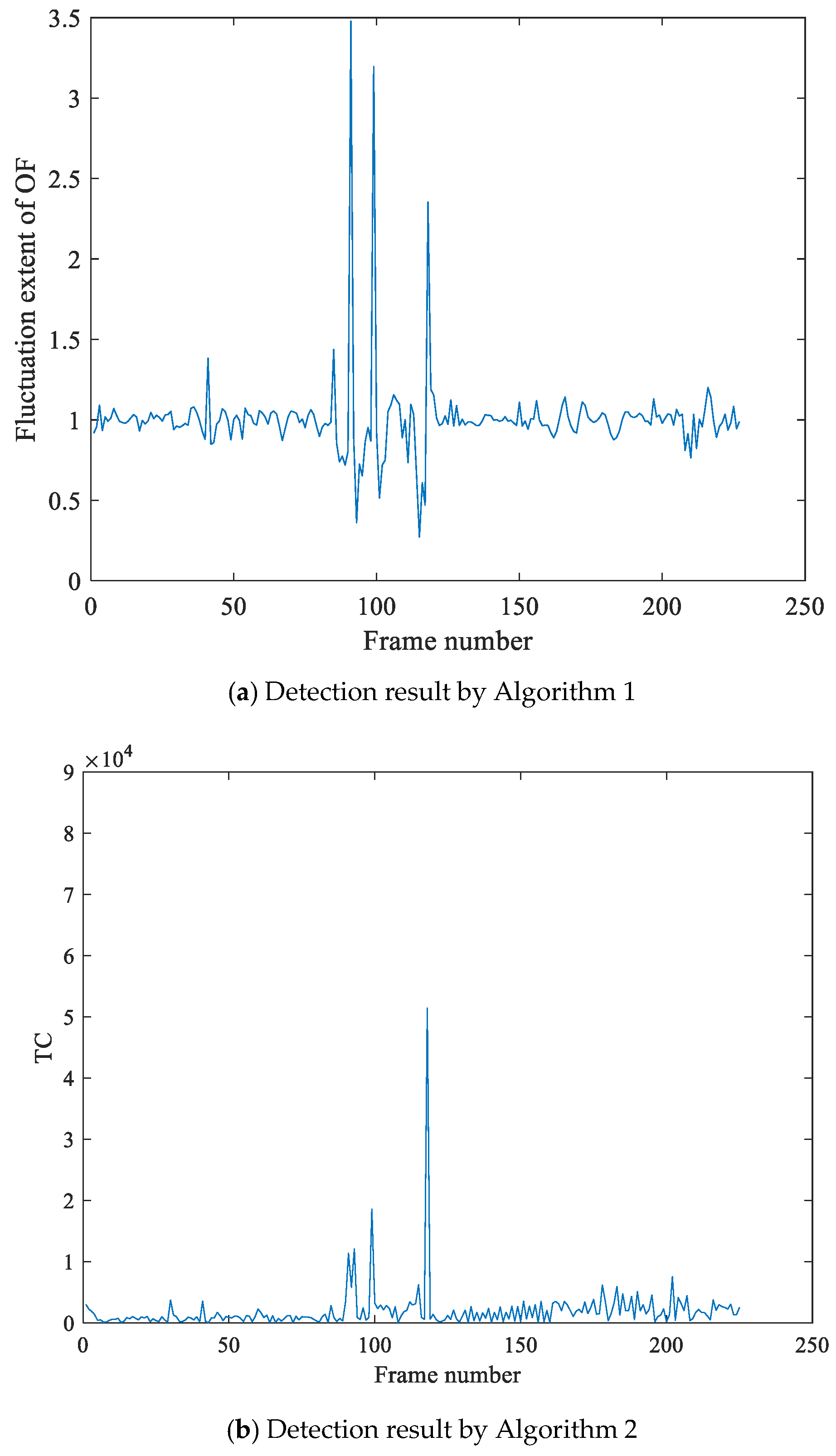
5.2. Experimental Results and Analysis
6. Experimental Results and Analysis
6.1. Experimental Data
6.2. Experimental Setup
6.3. Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, R.D.N. Aggarwal, A. Video content authentication techniques: A comprehensive survey. Multimed. Syst. 2017, 24, 211–240. [Google Scholar] [CrossRef]
- Zheng, L.; Sun, T.; Shi, Y.-Q. Inter-Frame Video Forgery Detection Based on Block-Wise Brightness Variance Descriptor. In Proceedings of the IWDW 2014: Digital-Forensics and Watermarking, Taipei, Taiwan, 1–4 October 2014; pp. 18–30. [Google Scholar]
- Kingra, S.; Aggarwal, N.; Singh, R.D. Inter-frame forgery detection in H.264 videos using motion and brightness gradients. Multimed. Tools Appl. 2017, 76, 25767–25786. [Google Scholar] [CrossRef]
- Wu, T.; Huang, T.; Yuan, X. Video Frame Interpolation Tamper Detection Based on Illumination Information. Comput. Eng. 2014, 40, 235–241. [Google Scholar]
- Wang, W.; Jiang, X.; Wang, S.; Wan, M.; Sun, T. Identifying Video Forgery Process Using Optical Flow. In Proceeding of the IWDW 2013: Digital-Forensics and Watermarking, Auckland, New Zealand, 1–4 October 2013; pp. 244–257. [Google Scholar]
- Jia, S.; Xu, Z.; Wang, H.; Feng, C.; Wang, T. Coarse-to-fine copy-move forgery detection for video forensics. IEEE Access 2018, 6, 25323–25335. [Google Scholar] [CrossRef]
- Beauchemin, S.S.; Barron, J.L. The computation of optical flow. ACM Comput. Surv. 1995, 27, 433–466. [Google Scholar] [CrossRef]
- Horn, B.; Schunck, B.G. Determining Optical Flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, T. Exposing video inter-frame forgery by Zernike opponent chromaticity moments and coarseness analysis. Multimed. Syst. 2017, 23, 223–238. [Google Scholar] [CrossRef]
- Sun, T.; Wang, W.; Jiang, X. Exposing video forgeries by detecting MPEG double compression. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; pp. 1389–1392. [Google Scholar]
- Lin, L.; Huang, T.; Pu, H.; Shi, P. Low rank theory-based inter-frame forgery detection for blurry video. J. Electron. Imaging 2019, 28, 063010. [Google Scholar]
- Liao, S.-Y.; Huang, T.-Q. Video copy-move forgery detection and localization based on Tamura texture features. In International Congress on Image & Signal Processing; IEEE: New York City, NY, USA, 2014; pp. 864–868. [Google Scholar]
- Feng, C.; Xu, Z.; Jia, S.; Zhang, W.; Xu, Y. Motion-adaptive frame deletion detection for digital video forensics. IEEE Trans. Circuits Syst. Video Technol. 2016, 27, 2543–2554. [Google Scholar] [CrossRef]
- Gennert, M.A.; Negahdaripour, S. Relaxing the Brightness Constancy Assumption in Computing Optical Flow; Massachusetts Inst. of Tech. Cambridge Artificial Intelligence Lab: Cambridge MA, USA, 1987. [Google Scholar]
- Kapulla, R.; Hoang, P.; Szijarto, R.; Fokken, J. Parameter sensitivity of optical flow applied to PIV Images. In Proceedings of the Fachtagung “Lasermethoden in der Strömungsmesstechnik”, Ilmenau, Germany, 6–8 September 2011. [Google Scholar]
- Zhao, D.-N.; Wang, R.-K.; Lu, Z.-M. Inter-frame passive-blind forgery detection for video shot based on similarity analysis. Multimed. Tools Appl. 2018, 77, 25389–25408. [Google Scholar] [CrossRef]
- Zhang, Z.; Hou, J.; Zhao-Hong, L. Video-frame insertion and deletion detection based on consistency of quotients of MSSIM. J. Beijing Univ. Posts Telecommun 2015, 38, 84–88. [Google Scholar]
- Su, Y.; Zhang, J.; Liu, J. Exposing digital video forgery by detecting motion-compensated edge artifac. In Proceedings of the 2009 International Conference on Computational Intelligence and Software Engineering, Wuhan, China, 11–13 December 2009. [Google Scholar]
- Liu, H.; Li, S.; Bian, S. Detecting Frame Deletion in H.264 Video. In Proceedings of the 10th International Conference, ISPEC 2014, Fuzhou, China, 5–8 May 2014; pp. 262–270. [Google Scholar]
- Aghamaleki, J.A.; Behrad, A. Malicious inter-frame video tampering detection in MPEG videos using time and spatial domain analysis of quantization effects. Multimed. Tools Appl. 2017, 76, 20691–20717. [Google Scholar] [CrossRef]
- Su, Y.; Xu, J. Detection of double-compression in MPEG-2 videos. In Proceedings of the 2010 2nd International Workshop on Intelligent Systems and Applications, Wuhan, China, 22–23 May 2010; pp. 1–4. [Google Scholar]
- Chauhan, A.K.; Krishan, P. Moving object tracking using gaussian mixture model and optical flow. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2013, 3, 243–246. [Google Scholar]
- Nagel, H.-H. On the estimation of optical flow: Relations between different approaches and some new results. Artif. Intell. 1987, 33, 299–324. [Google Scholar] [CrossRef]
- Aisbett, J. Optical flow with an intensity-weighted smoothing. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 512–522. [Google Scholar] [CrossRef]
- Deng, G.; Cahill, L. An adaptive Gaussian filter for noise reduction and edge detection. In Proceedings of the 1993 IEEE Conference Record Nuclear Science Symposium and Medical Imaging Conference, San Francisco, CA, USA, 31 October–6 November 1993; pp. 1615–1619. [Google Scholar]
- Feng, C. Study on Motion-Adaptive Frame Deletion Detection for Digital Video Forensics; Wuhan University: Wuhan, China, 2015. [Google Scholar]
- Singla, N. Motion detection based on frame difference method. Int. J. Inf. Comput. Technol. 2014, 4, 1559–1565. [Google Scholar]
- Ramakrishnan, N.; Wu, M.; Lam, S.-K.; Srikanthan, T. Automated thresholding for low-complexity corner detection. In Proceedings of the 2014 NASA/ESA Conference on Adaptive Hardware and Systems (AHS), Leicester, UK, 14-17 July 2014; pp. 97–103. [Google Scholar]
- Baker, S.; Scharstein, D.; Lewis, J.; Roth, S.; Black, M.J.; Szeliski, R. A database and evaluation methodology for optical flow. Int. J. Comput. Vis. 2011, 92, 1–31. [Google Scholar] [CrossRef]
- Finlayson, G.D.; Zakizadeh, R. Reproduction angular error: An improved performance metric for illuminant estimation. Perception 2014, 310, 1–26. [Google Scholar]
- Vint, P.F.; Hinrichs, R.N. Endpoint error in smoothing and differentiating raw kinematic data: An evaluation of four popular methods. J. Biomech. 1996, 29, 1637–1642. [Google Scholar] [CrossRef]
- Qadir, G.; Yahaya, S.; Ho, A.T. Surrey university library for forensic analysis (SULFA) of video content. In Proceedings of the IET Conference on Image Processing, London, UK, 3–4 July 2012; pp. 1–5. [Google Scholar]
- Goyette, N.; Jodoin, P.-M.; Porikli, F.; Konrad, J.; Ishwar, P. Changedetection. net: A new change detection benchmark dataset. In Proceedings of the 2012 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Providence, RI, USA, 16–21 June 2012; pp. 1–8. [Google Scholar]
- Hu, Y.J.; Salman, A.H.; Wang, Y.F.; Liu, B.B.; Li, M. Construction and Evaluation of Video Forgery Detection Database. J. S. China Univ. Technol. 2017, 45, 57–64. [Google Scholar]
- Jia, S.; Feng, C.; Xu, Z.; Xu, Y.; Wang, T. ACE algorithm in the application of video forensics. In Proceedings of Multimedia, Communication and Computing Application: Proceedings of the 2014 International Conference on Multimedia, Communication and Computing Application (MCCA 2014), Xiamen, China, 16–17 October 2014; p. 177.
- He, Z. The data flow anomaly detection analysis based on Lip–Chebyshev method. Comput. Syst. Appl. 2009, 18, 61–64. [Google Scholar]
- Huang, T.; Zhang, X.; Huang, W.; Lin, L.; Su, W. A multi-channel approach through fusion of audio for detecting video inter-frame forgery. Comput. Secur. 2018, 77, 412–426. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approaches | Descriptions and Parameter Settings |
|---|---|
| HS | Classical H&S method, . |
| HS + IN | H&S method with Intensity Normalization, . |
| HS + BR | H&S method with Brightness Relaxing factor, , and d = 0.35. |
| the enhanced OF algorithm | combine HS+BR and intensity normalization. |
| Approaches | AAE | Average EPE | Time (s) |
|---|---|---|---|
| HS | 13.188 | 1.350 | 6.07 |
| HS + IN | 7.074 | 0.776 | 6.62 |
| HS + BR | 28.497 | 6.631 | 7.08 |
| Enhanced algorithm | 4.175 | 0.389 | 8.06 |
| Parameters | Methods | ||||
|---|---|---|---|---|---|
| Ref. [3] | Ref. [6] | Ref. [9] | Ref. [37] | Proposed | |
| Consider the illumination noise | No | No | Not validated | Not validated | Yes |
| Consider the jitter noise | Not validated | Not validated | Not validated | Not validated | Yes |
| Validation by multi-forgery | No | No | No | No | Yes |
| Forgery detected | Removal/Insertion/copy-move | Copy-move | Removal/insertion/copy-move | Removal/insertion/copy-move | Removal/insertion/copy-move |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pu, H.; Huang, T.; Weng, B.; Ye, F.; Zhao, C. Overcome the Brightness and Jitter Noises in Video Inter-Frame Tampering Detection. Sensors 2021, 21, 3953. https://doi.org/10.3390/s21123953
Pu H, Huang T, Weng B, Ye F, Zhao C. Overcome the Brightness and Jitter Noises in Video Inter-Frame Tampering Detection. Sensors. 2021; 21(12):3953. https://doi.org/10.3390/s21123953
Chicago/Turabian StylePu, Han, Tianqiang Huang, Bin Weng, Feng Ye, and Chenbin Zhao. 2021. "Overcome the Brightness and Jitter Noises in Video Inter-Frame Tampering Detection" Sensors 21, no. 12: 3953. https://doi.org/10.3390/s21123953
APA StylePu, H., Huang, T., Weng, B., Ye, F., & Zhao, C. (2021). Overcome the Brightness and Jitter Noises in Video Inter-Frame Tampering Detection. Sensors, 21(12), 3953. https://doi.org/10.3390/s21123953