1. Introduction
Wireless sensor networks (WSNs) are nowadays ubiquitous. They are used in various different domains: military, medical, environment, etc. Research on WSNs has tried to optimize sensor network design [
1,
2,
3]; i.e., coverage quality, network lifetime, sensor placement, communication and computation effort, etc. Coverage is one of the most widely studied problems in WSNs. Coverage of a WSN reflects the quality of service (QoS) provided by that WSN; e.g., a high-quality WSN used in a security system may detect unauthorized penetration with probability higher than 99% [
4,
5,
6]. Among the studies on the coverage problem, barrier coverage has drawn tremendous attention from the academic community due to its huge potential in various security applications [
7,
8,
9,
10]. To evaluate coverage quality of WSN, especially in barrier coverage problems, a well-known method is using exposure as a metric [
11,
12,
13]. Great effort in studies related to exposure has been made to investigate the minimal exposure path problem. The goal of the minimal exposure path (MEP) problem is to find a penetration path having minimal exposure value from a source point to a destination point in the sensing field. With the knowledge of MEP, the sensor network designers can appraise weaknesses or worst-case coverage paths of a sensor network, since objects moving across the sensing field along this path have the least capacity to be detected. As a result, information of the MEP can be used in optimizing, managing and maintaining WSNs. Measuring exposure is not only useful in the WSN but also in several other fields, such as evaluating the quality of radio signal propagation or manufacturing path-finding robots.
Recently, mobile wireless sensor networks (MWSNs) have been received increasing interest because of a wide variety of potential applications. A MWSN consists of mobile sensor nodes which are equipped with a locomotive unit and can move around after deployment [
14,
15,
16,
17]. Sensors can be attached to larger machines like mobile robots or can be a self-contained miniature system with the ability to move to desired areas. Such MWSNs are extremely valuable in situations where traditional static wireless sensor network (SWSN) deployment mechanisms fail or are not suitable; for instance, a hostile environment where sensors cannot be manually deployed, and must be air-dropped. MWSNs also play an important role in homeland security. Sensors can be mounted on vehicles (subway trains, taxis, police cars, fire trucks, boats, etc.) or carried by people (policemen, fire fighters, etc.). These sensors accompany with their carriers in every motion, and can monitor and dynamically patrol the environment (for chemicals, biological matter, wildfires or radiological agents). For example, MWSN can be used in wildfire monitoring applications. The mobile sensors are able to maintain a safe distance from the fire perimeter, and provide updating information to fire fighters that indicate where the perimeter currently is. In other application scenarios, such as atmosphere and under-water environment monitoring, airborne or under-water sensors may move with the surrounding air or water currents [
18,
19]. The coverage of a MWSN now depends not only on the initial network configurations, but also on the mobility behavior of the sensors. Thanks to the mobility of sensor nodes, MWSNs can improve coverage quality, prolong the network lifetime, optimize use of resources and be relocated very efficiently [
20,
21,
22].
The MEP problem in SWSNs has been intensively studied by the academic community. However, this problem has not yet been efficiently explored and exploited in MWSNs. Motivated by the advantages of MWSNs and the vital role of the MEP problem, this paper investigates the problem of finding the minimal exposure path in a MWSN (hereinafter MMEP). Specifically, given a set of mobile sensor nodes which are randomly deployed in the region of interest (ROI), the goal of the MMEP problem is to find a crossing path from a source point to a destination point such that an intruder moving along this path has the lowest possibility of being detected, meaning that this path has the minimal exposure value. The MEP problem is an optimization problem. Usually, it is converted into numerical functional extreme problem [
23]. Due to high dimensionality and non-linearity of the objective function, and the mobility feature of sensors, the MMEP problem is much more challenging than the traditional MEP problem in SWSNs. Hence, we propose to integrate genetic algorithm into particle swarm optimization to form an efficient algorithm named HPSO-MMEP algorithm.
The main contributions of this paper are as follows:
Formulating the MMEP problem in MWSNs with several different sensing coverage models.
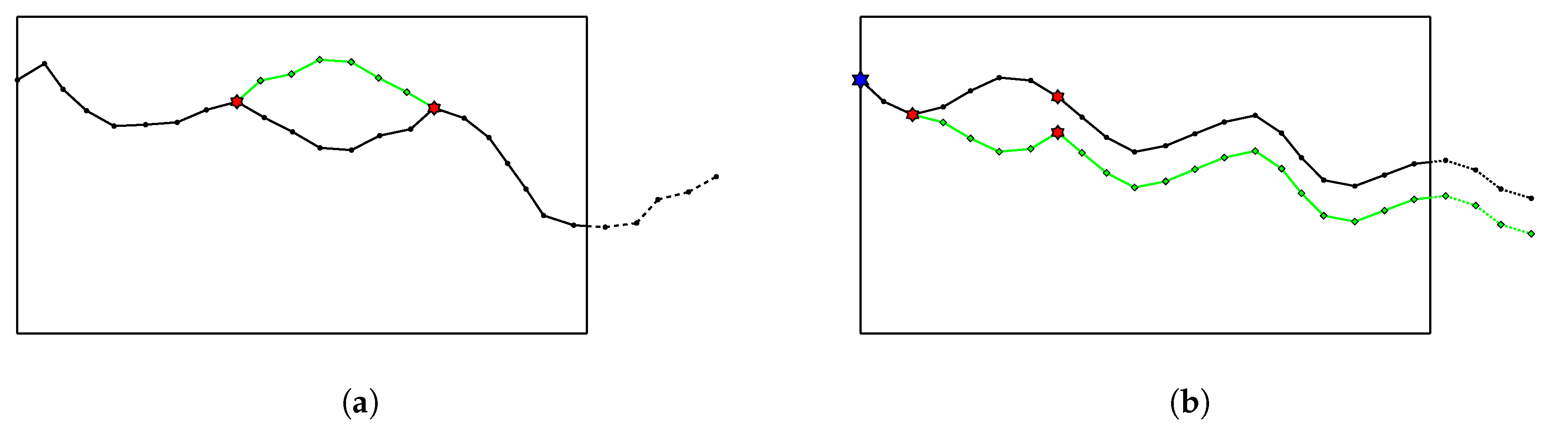
Devising an elite hybrid particle swarm optimization algorithm, called HPSO-MMEP, which integrates genetic operators into PSO algorithm to significantly improve the performance of original PSO.
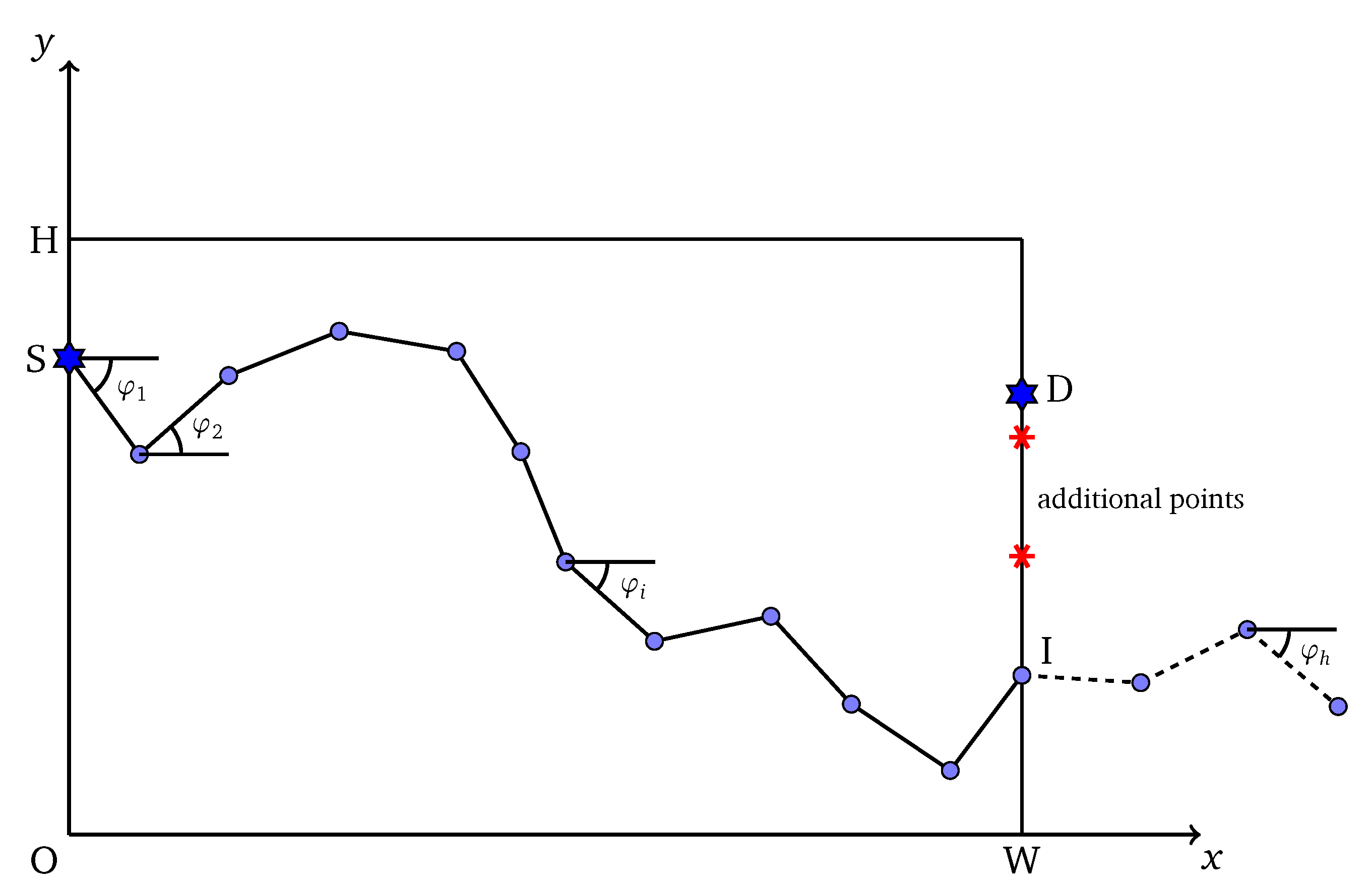
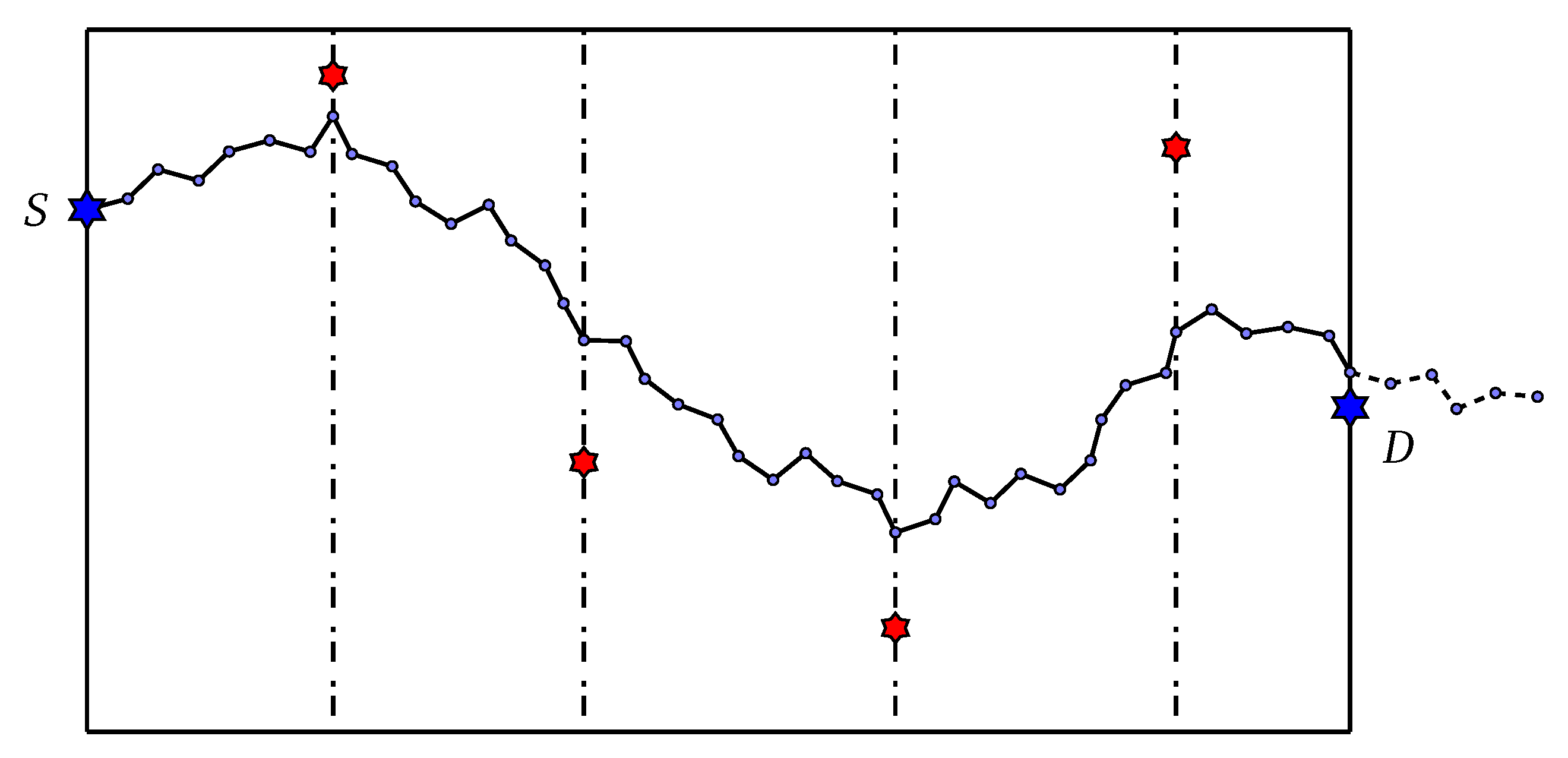
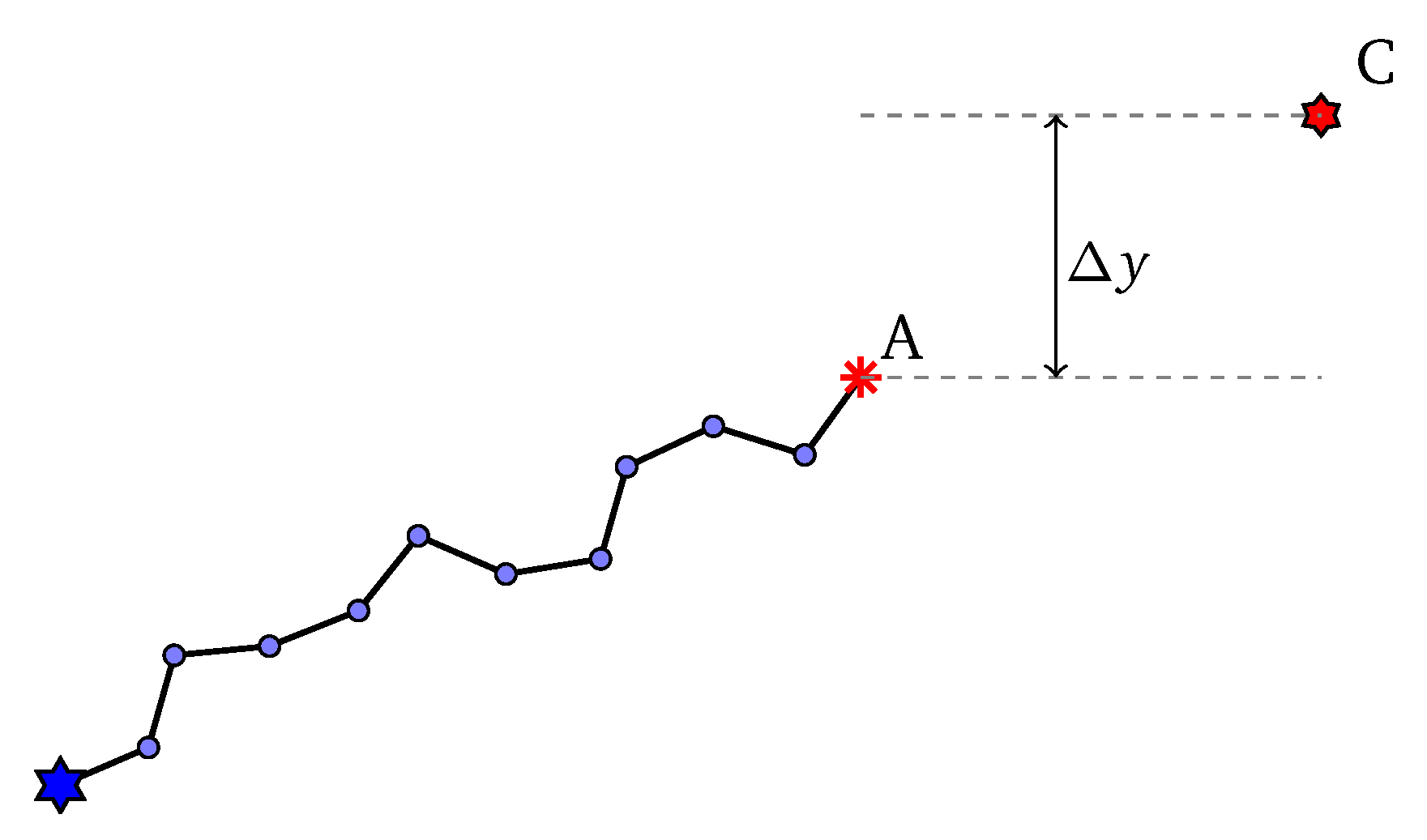
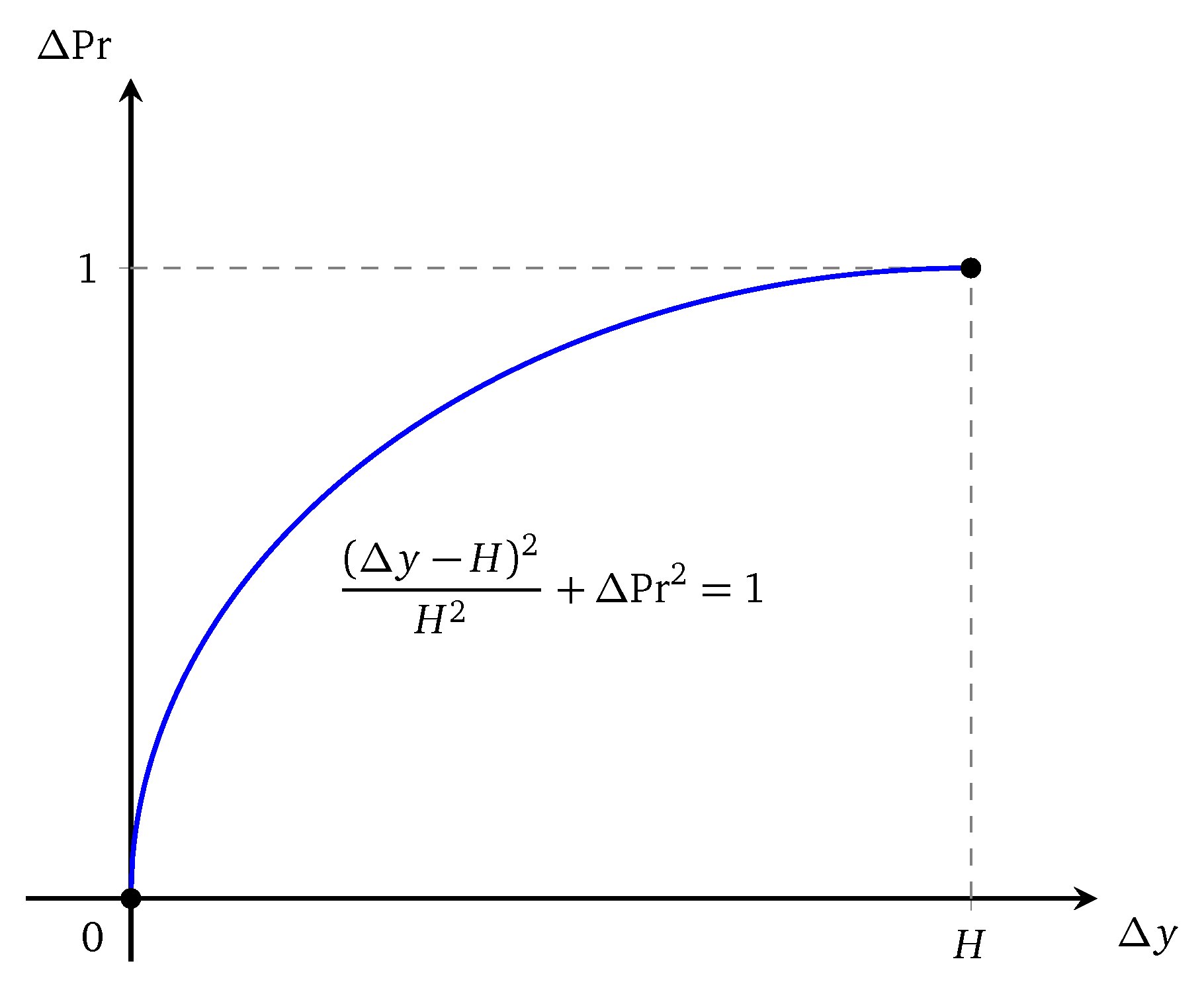
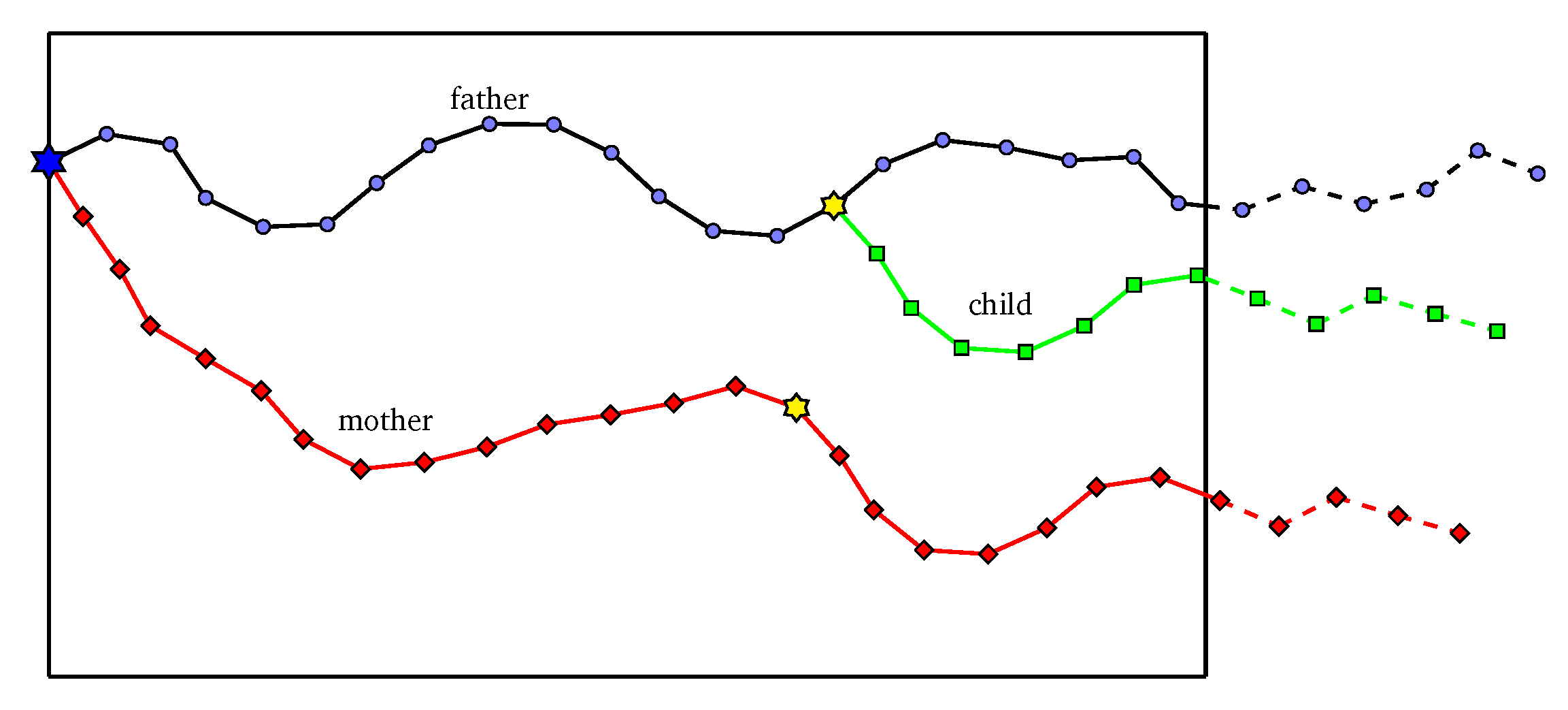
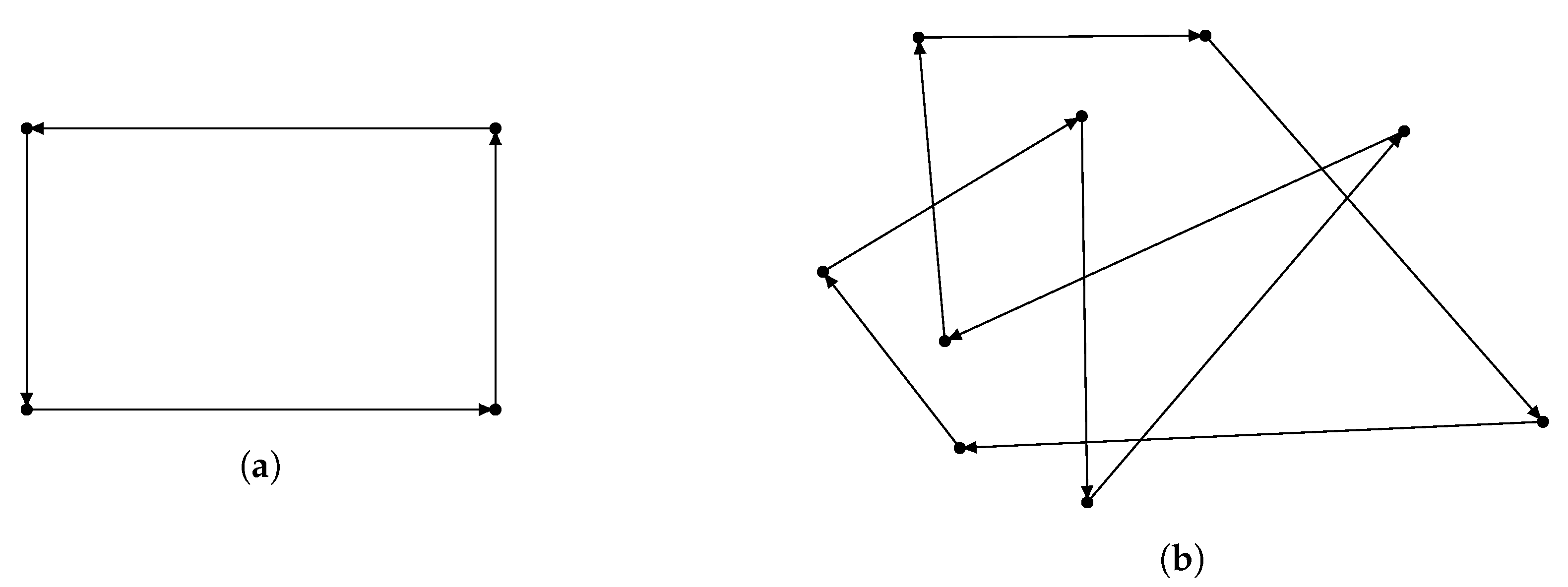
Designing a new individual representation and proposing a strategy for generating individuals called controlled-point (CP) initialization which ensures the diversity of the generated population.
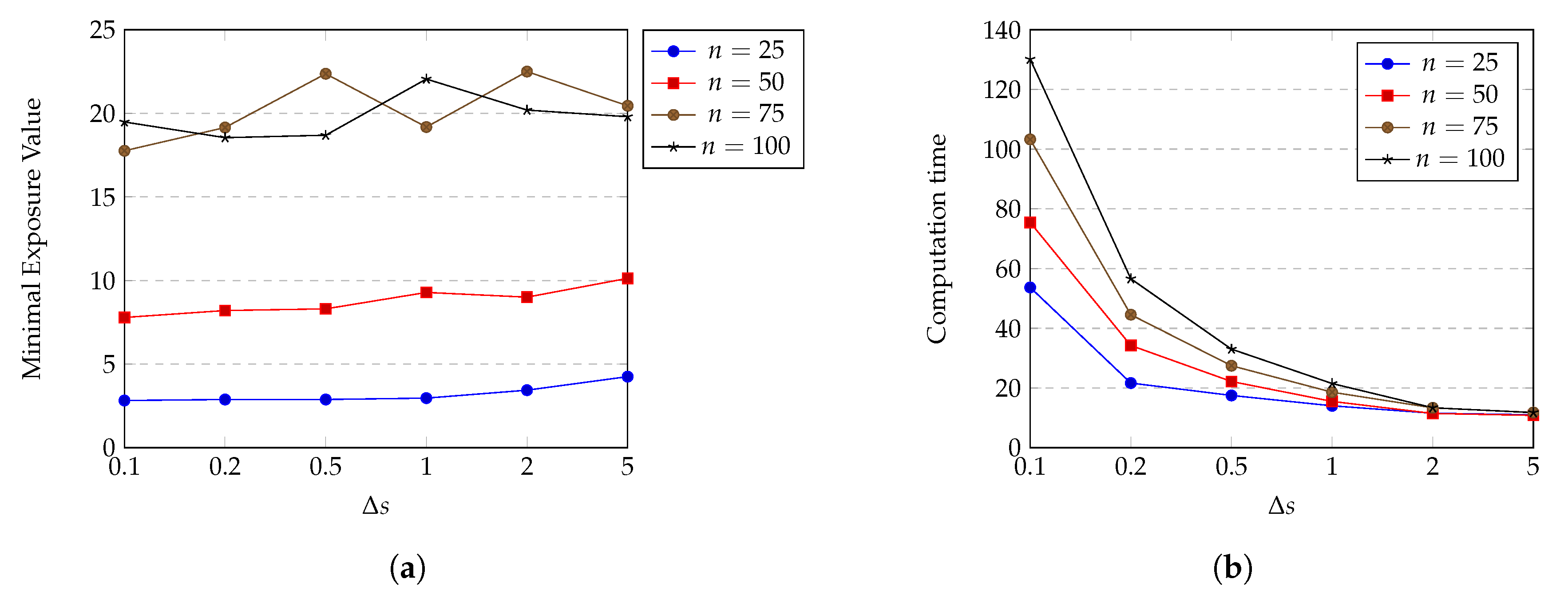
Conducting numerous experiments in various scenarios to evaluate the performance of HPSO-MMEP. The experimental results are thoroughly analyzed to give insights into the affects of different factors.
The rest of this paper is organized as follows. Related works regarding the MEP problem are discussed in
Section 2.
Section 3 provides some preliminaries, the formulation of the MMEP problem and the proposed algorithm HPSO-MMEP. Experimental results are considered in
Section 4. Finally,
Section 5 presents conclusions and future works of the paper.
2. Related Works
This section provides the big picture of literature regarding the MEP problem. Different MEP models dependent on various factors, such as types of sensors, deployment strategies, deployment environments and solution approaches, are briefly reviewed.
Regarding SWSNs, a number of studies have focused on the MEP problem with several different approaches: computational geography, grid-based and heuristic/metaheuristic. Using Voronoi diagram has been the most widely used method for the computational geometry approach. Voronoi diagram-based methods and grid-based methods were the earliest methods to address the MEP problem. In [
24], Meguerdichian et al. was the first to devise the concept “exposure”, and contended that finding the MEP in WSNs under arbitrary sensor and intensity models is very meaningful for network designers but is an extremely difficult for optimization tasks. The authors found the closed-form solution in the case of polygonal region with a single sensor under some constraints. In the generic case, where the sensing field consists of multiple sensors, the grid-based method was applied. The MEP problem was then focused on by the academic community [
12,
24,
25,
26,
27,
28]. In [
27], Djidjev et al. derived the closed-form solution for the MEP problem with a single-sensor field in both unbounded and polygonal regions. This solution completed the open problems left from [
24]; i.e., it worked with both bounded and polygonal regions without any constraints. Based on this result, the authors provided an approximation algorithm for calculating MEP in a multiple-sensor field. The main idea was triangulating the sensing field using a Voronoi diagram, and in the scope of each Voronoi cell, the MEP was calculated by the optimal solution in the single-sensor case. To obtain the solution for the whole sensing field, Dijkstra shortest path algorithm was performed in the final one. While this method successfully dealt with closest-sensor field intensity model, it could not be applied for all-sensor field intensity model. In [
12], the authors introduced a very similar concept to MEP which was the maximal breach path—a path running from a single source to a destination point across the sensing field, in which the Euclidean distance from any point on the path to the closest sensor is maximized. The authors proved that the maximal breach path must lie on the edges of Voronoi diagram corresponding to the set of sensors. The maximal breach path was then easily calculated using the Dijkstra shortest path algorithm. Both the minimal exposure path and the maximal breach path provide information about the worst-case coverage of the sensor network; however, the minimal exposure path is more generic since it can be used with a variety of network models. In [
29], the authors studied the maximal breach path problem; they then proposed the Voronoi diagram-based algorithm for solving the problem. In [
13], the authors extended the previous concept of the worst-case path-based coverage to evaluate the coverage of a given network from a global point of view, taking arbitrary paths into account by considering the arbitrary source and destination pairs. They then presented centralized and distributed algorithms that used knowledge from computational geometry; i.e., Voronoi diagram and Delauney triangulation. The works in [
26,
30,
31,
32] addressed different MEP models using the common idea of breaking the region of interest into small grids. In [
26], the region of interest was broken into Voronoi cells and the calculation of the MEP was limited to the scope of each cell. The authors then proposed a localized algorithm that can effectively reduce the communication and computation performed by the sensor network. Song et al. [
31] and Liu et al. [
32] used uniform square grids to partition the ROI. While almost grid-based methods used the Dijkstra shortest path algorithm to search for the MEP, the authors in [
31] proposed a metaheuristic algorithm called Physarum optimization algorithm to achieve the minimal exposure road-network among multiple points of interest. This algorithm then can be applied to solve the Steiner tree problem. In [
32], the authors used percolation theory to derive the critical conditions for the existence exposure path, where an exposure path is a penetration path through the sensor network on which every point is not covered by any sensor.
The advantage of the Voronoi diagram-based method is that it extracts the geometric characteristics of Voronoi diagram to reduce the significant computational effort. However, this method only works under a particular type of network model. Unless the network is homogeneous and the sensors are isotropic, the Voronoi diagram-based method cannot obtain the solution because if not for that case, the intrinsic geometric characteristics of Voronoi diagram will no longer reflect information about the MEP. For the grid-based method, its main idea can be summarized as follows: (1) transform the continuous search domain of the MEP problem into a discrete one by discretizing the region of interest into small grids; (2) construct a graph based on these grids and perform a graph search algorithm to calculate MEP. The grid-based method can deal with almost all types of network model, and different constraints of the particular problem. However, the results of this method are limited; i.e., the path that is found always follows fixed directions, which does not follow realistic scenarios. In addition, there must be a trade-off between the solution accuracy and the computation effort; i.e., to get higher accuracy, the grid size must be smaller, which increases the computational time.
Since the Voronoi diagram-based and the grid-based methods posed several disadvantages, as mentioned above, recently, heuristic/metaheuristic methods which were inspired by the process in nature, such as particle swarm optimization (PSO) and the genetic algorithm, were applied to solving the MEP problem [
29,
33,
34,
35,
36,
37]. These studies converted the MEP problem into the numerical functional extreme (NFE) problem [
23] by breaking the penetration path into small enough path intervals and then performed a metaheuristic algorithm to search for the optimal result. Although the general idea was shared among these studies, each work proposed different techniques that are appropriate to the particularities of the models considered. Miao et al. [
33] modified the PSO algorithm by adding a Gauss mutation operator and a projection operator to avoid the saw-tooth shape of the obtained path. To eliminate this saw-tooth effect of the metaheuristic algorithm and improve the efficiency, the authors in [
34] proposed a genetic algorithm with a special crossover operator, a local search scheme and an upside-down operator. Feng et al. [
37] considered the MEP problem with path constraints. A genetic algorithm was then proposed with a local search operator that could effectively remove the saw-tooth shape in the path solution and increase the convergence speed. Binh et al. [
35] studied the MEP problem under a practical probabilistic coverage model, which took environmental factors into consideration and regarded them as noise. The problem was then addressed using a genetic algorithm with two efficient crossover operators and one mutation operator. The authors also investigated the MEP problem under a directional heterogeneous sensor network in [
36]. This work introduced a novel PSO algorithm based on gravity force theory. All of those studies on the MEP problem were done to achieve a solution as good as possible in the least computational time. Compared to previous Voronoi diagram-based and grid-based approaches, this approach obtained better results in less computational time.
We have delved into the related works of the MEP problem in WSNs. It is certain that almost the authors did not regard moving ability of sensor nodes. Previously, there was only one research paper related to MMEP, written by Zhang et al. [
38]. Nevertheless, their study solved the MEP problem under a hybrid sensor network with both static and mobile sensor, in which the minimal exposure path under static sensors that could avoid mobile sensors was introduced. The approach of this work was a Voronoi diagram method which could not be generalized to deal with other network models, such as an entirely mobile sensor network or a heterogeneous sensor network. Our previous publication in 2017 [
39] also studied the MEP problem in MWSNs. However, the research result was not optimal, which served as the motivation for us to do further research and come up with a more efficient solution for the MMEP problem. Therefore, in this paper, we introduce a heuristic strategy called control-point initialization and propose the HPSO-MMEP algorithm to effective solve the MMEP problem.
We summarize all the related works presented in this section in
Table 1.


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}