Enhanced Sensing and Sum-Rate Analysis in a Cognitive Radio-Based Internet of Things

 ,
, 


Abstract
1. Introduction
- •
- We propose an enhanced spectrum sensing mechanism. The sum rate in a CR-IoT networks realized using the KLD technique is evaluated and investigated. The effectiveness of the proposed scheme is verified by comparing the numerical performance, e.g., sensing performance and throughput, with the conventional ED technique.
- •
- We review the KLD technique in which each CR-IoT user achieves the desired sensing performance, even with a small number of samples, and robustness to noise uncertainty.
- •
- We study the sensing performance of CR-IoT users and an FC using the soft fusion rule.
- •
- Based on the improved sensing performance, the sum rate of the primary and secondary networks, i.e., the CR-IoT, is analyzed for the conventional and the proposed scheme using the soft fusion rule under various channel conditions.
2. Spectrum Sensing in CR-IoT Networks
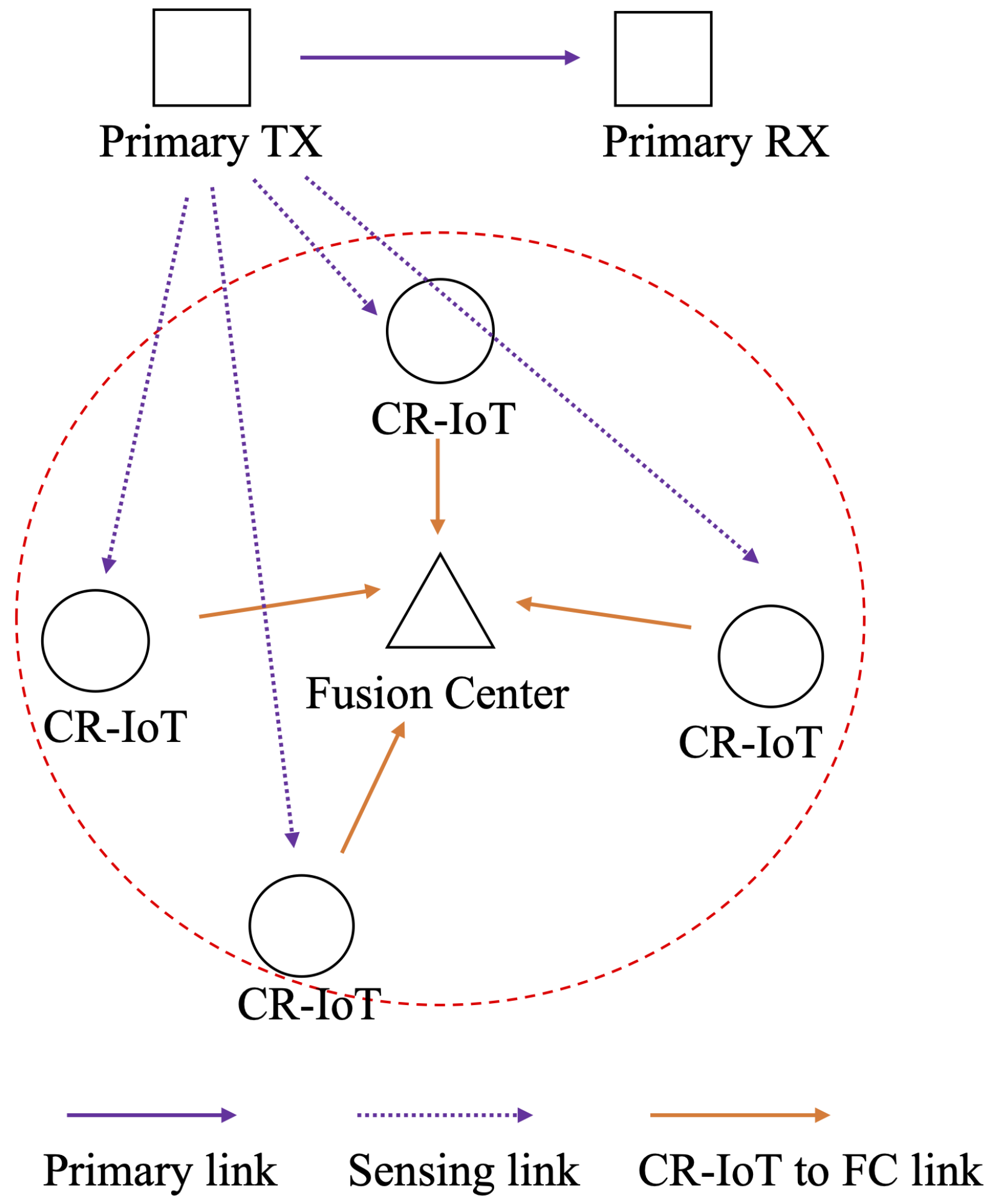
2.1. System Model
2.2. Conventional Energy Detection Technique
2.3. Sensing Performance
| Algorithm 1 The conventional ED technique with cooperation for a CR-IoT network |
Input: and Output: Calculate the probability of a false alarm the probability of detection and the sum rate
|
3. Proposed Spectrum Sensing
3.1. Spectrum Sensing Based on the KLD Technique
3.2. Sum Rate Analysis
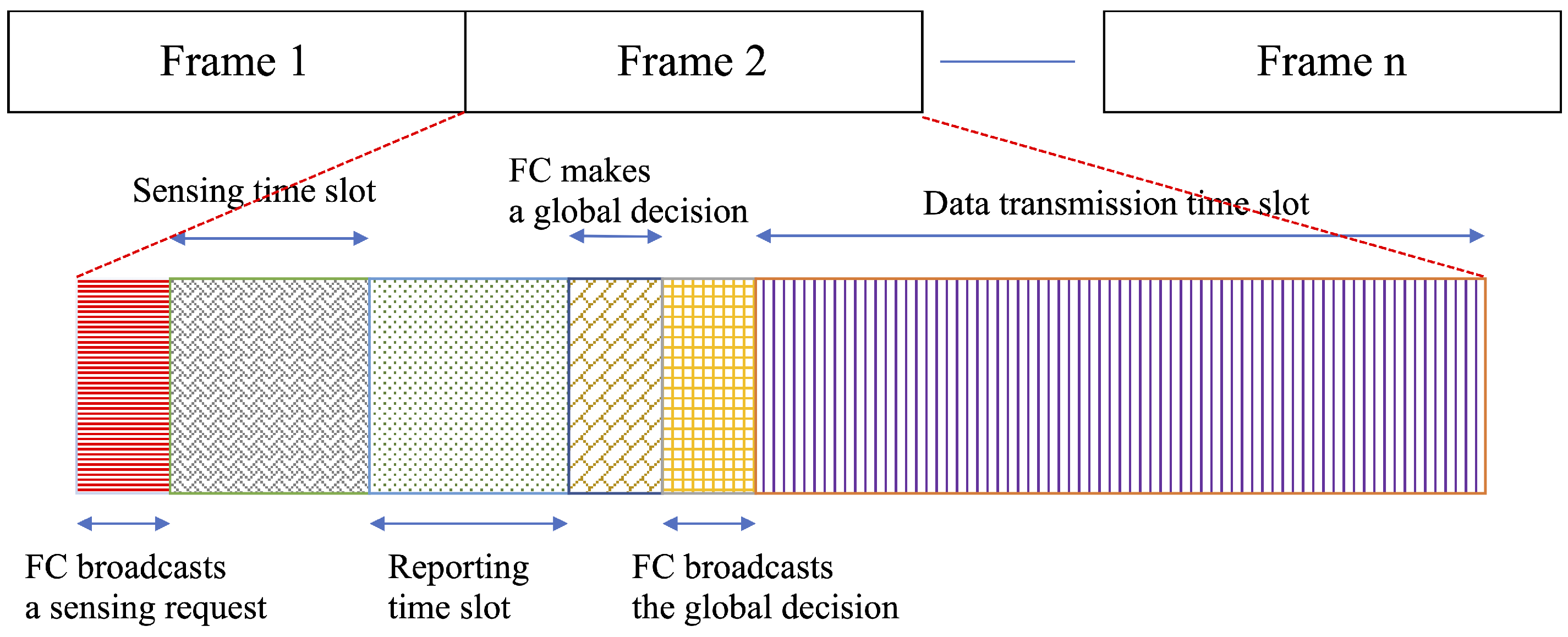
3.3. Total Time Analysis
| Algorithm 2 The proposed KLD technique for a CR-IoT network. |
Input: and Output: Calculate the probability of a false alarm the probability of detection and the sum rate |
4. Simulation Results and Discussion
5. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Yu, H.; Lee, H.; Jeon, H. What is 5G? Emerging 5G Mobile Services and Network Requirements. Sustainability 2019, 9, 1848. [Google Scholar] [CrossRef]
- Miah, M.S.; Schukat, M.; Barrett, E. An enhanced sum rate in the cluster based cognitive radio relay network using the sequential approach for the future Internet of Things. Hum. Comput. Inf. Sci. 2018, 8, 16. [Google Scholar] [CrossRef]
- Zhu, J.; Song, Y.; Jiang, D.; Song, H. A new deep-Q-learning-based transmission scheduling mechanism for the cognitive Internet of Things. IEEE Internet Things J. 2017, 5, 2375–2385. [Google Scholar] [CrossRef]
- Li, T.; Yuan, J.; Torlak, M. Network throughput optimization for random access narrowband cognitive radio Internet of Things (NB-CR-IoT). IEEE Internet Things J. 2018, 5, 1436–1448. [Google Scholar] [CrossRef]
- Miah, M.; Schukat, M.; Barrett, E. Sensing and throughput analysis of a MU-MIMO based cognitive radio scheme for the Internet of Things. Comput. Commun. 2020, 154, 442–454. [Google Scholar] [CrossRef]
- Kim, B.; Yu, H.; Noh, S. Cognitive Interference Cancellation with Digital Channelizer for Satellite Communication. Sensors 2020, 20, 355. [Google Scholar] [CrossRef]
- Awin, F.A.; Alginahi, Y.M.; Abdel-Raheem, E.; Tepe, K. Technical issues on cognitive radio-based Internet of Things systems: A survey. IEEE Access 2019, 7, 97887–97908. [Google Scholar] [CrossRef]
- Tang, Y.; Li, Q. Reviews on the Cognitive Radio Platform Facing the IOT. In Informatics in Control, Automation and Robotics; Springer: Berlin/Heidelberg, Germany, 2011; pp. 825–833. [Google Scholar]
- Khan, A.A.; Rehmani, M.H.; Rachedi, A. Cognitive-radio-based internet of things: Applications, architectures, spectrum related functionalities, and future research directions. IEEE Wirel. Commun. 2017, 24, 17–25. [Google Scholar] [CrossRef]
- Cavdar, T.; Ebrahimpour, N. Decision making for small industrial internet of things using decision fusion. Turkish J. Electr. Eng. Comput. Sci. 2019, 27, 4134–4150. [Google Scholar] [CrossRef]
- Mitola, J.; Maguire, G.Q. Cognitive radio: Making software radios more personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radio: brain–empowered wireless communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Wyglinski, A.M.; Nekovee, M.; Hou, T. Cognitive Radio Communications and Networks: Principles and Practice; Academic Press: Burlington, MA, USA, 2009. [Google Scholar]
- Alghorani, Y.; Kaddoum, G.; Muhaidat, S.; Pierre, S.; Al-Dhahir, N. On the Performance of Multihop- Intervehicular Communications Systems Over Rayleigh Fading Channels. IEEE Wirel. Commun. Lett. 2015, 5, 116–119. [Google Scholar] [CrossRef]
- Joshi, P.; Bagwari, A. An Overview of Cognitive Radio Networks: A Future Wireless Technology. In Sensing Techniques for Next Generation Cognitive Radio Networks; IGI Global: Hershey, PA, USA, 2019; pp. 1–26. [Google Scholar]
- Supraja, P.; Gayathri, V.; Pitchai, R. Optimized neural network for spectrum prediction using genetic algorithm in cognitive radio networks. Cluster Comput. 2019, 22, 157–163. [Google Scholar] [CrossRef]
- Gu, Y.; Chen, H.; Zhai, C.; Li, Y.; Vucetic, B. Minimizing age of information in cognitive radio-based iot systems: Underlay or overlay? IEEE Internet Things J. 2019, 6, 10273–10288. [Google Scholar] [CrossRef]
- Majumder, S. Energy Detection Spectrum Sensing on RTL-SDR based IoT Platform. In Proceedings of the 2018 Conference on Information and Communication Technology (CICT), Madhya Pradesh, India, 26–28 October 2018; pp. 1–6. [Google Scholar]
- Akyildiz, I.F.; Lee, W.Y.; Vuran, M.C.; Mohanty, S. NeXt generation/dynamic spectrum access/cognitive radio wireless networks: A survey. Comput. Netw. 2006, 50, 2127–2159. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Shin, O.S. Cooperative prediction-and-sensing-based spectrum sharing in cognitive radio networks. IEEE Trans. Cognit. Commun. Netw. 2017, 4, 108–120. [Google Scholar] [CrossRef]
- Vimal, S.; Kalaivani, L.; Kaliappan, M. Collaborative approach on mitigating spectrum sensing data hijack attack and dynamic spectrum allocation based on CASG modeling in wireless cognitive radio networks. Cluster Comput. 2019, 22, 10491–10501. [Google Scholar] [CrossRef]
- El-Saleh, A.A.; Ismail, M.; Ali, M.; Mohd, A.; Arka, I.H. Hybrid SDF-HDF Cluster-Based Fusion Scheme for Cooperative Spectrum Sensing in Cognitive Radio Networks. KSII Trans. Internet Inf. Syst. 2010, 4, 1023–1041. [Google Scholar] [CrossRef]
- Shen, B.; Kwak, K.S. Soft combination schemes for cooperative spectrum sensing in cognitive radio networks. ETRI J. 2009, 31, 263–270. [Google Scholar] [CrossRef]
- Bouraoui, R.; Besbes, H. Cooperative spectrum sensing for cognitive radio networks: Fusion rules performance analysis. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 15 January 2016; pp. 493–498. [Google Scholar]
- Ahmed, M.E.; Kim, D.I.; Kim, J.Y.; Shin, Y. Energy-arrival-aware detection threshold in wireless-powered cognitive radio networks. IEEE Trans. Veh. Technol. 2017, 66, 9201–9213. [Google Scholar] [CrossRef]
- Tavana, M.; Rahmati, A.; Shah-Mansouri, V.; Maham, B. Cooperative sensing with joint energy and correlation detection in cognitive radio networks. IEEE Commun. Lett. 2016, 21, 132–135. [Google Scholar] [CrossRef]
- Miah, M.S.; Rahman, M.M. An eigenvalue and superposition approach based cooperative spectrum sensing in cognitive radio networks. In Proceedings of the 2014 International Conference on Electrical Engineering and Information & Communication Technology, Dhaka, Bangladesh, 20–21 March 2014; pp. 1–7. [Google Scholar]
- Plata, D.M.M.; Reátiga, Á.G.A. Evaluation of energy detection for spectrum sensing based on the dynamic selection of detection-threshold. Proc. Eng. 2012, 35, 135–143. [Google Scholar] [CrossRef]
- Khan, R.T.; Islam, M.I.; Zaman, S.; Amin, M. Comparison of cyclostationary and energy detection in cognitive radio network. In Proceedings of the 2016 International Workshop on Computational Intelligence (IWCI), Dhaka, Bangladesh, 12–13 December 2016; pp. 165–168. [Google Scholar]
- Sarala, B.; Devi, D.R.; Bhargava, D. Classical energy detection method for spectrum detecting in cognitive radio networks by using robust augmented threshold technique. Cluster Comput. 2019, 22, 11109–11118. [Google Scholar] [CrossRef]
- Miah, M.S.; Yu, H.; Godder, T.K.; Rahman, M.M. A cluster-based cooperative spectrum sensing in cognitive radio network using eigenvalue detection technique with superposition approach. Int. J. Distrib. Sens. Netw. 2015, 11, 207935. [Google Scholar] [CrossRef]
- Amin, M.R.; Rahman, M.M.; Hossain, M.A.; Islam, M.K.; Ahmed, K.M.; Singh, B.C.; Miah, M.S. Unscented kalman filter based on spectrum sensing in a cognitive radio network using an adaptive fuzzy system. Big Data Cognit. Comput. 2018, 2, 39. [Google Scholar] [CrossRef]
- Rawat, A.S.; Anand, P.; Chen, H.; Varshney, P.K. Collaborative spectrum sensing in the presence of Byzantine attacks in cognitive radio networks. IEEE Trans. Signal Proc. 2010, 59, 774–786. [Google Scholar] [CrossRef]
- Awin, F.; Abdel-Raheem, E.; Tepe, K. Blind spectrum sensing approaches for interweaved cognitive radio system: A tutorial and short course. IEEE Commun. Surv. Tutor. 2018, 21, 238–259. [Google Scholar] [CrossRef]
- Iqbal, Z.; Nooshabadi, S.; Jadi, K.; Ghasemi, A. Sensor Cooperation and Decision Fusion to Improve Detection in Cognitive Radio Spectrum Sensing. In Proceedings of the 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York City, NY, USA, 8–10 November 2018; pp. 276–281. [Google Scholar]
- Gul, N.; Qureshi, I.M.; Omar, A.; Elahi, A.; Khan, S. History based forward and feedback mechanism in cooperative spectrum sensing including malicious users in cognitive radio network. PLoS ONE 2017, 12, e0183387. [Google Scholar] [CrossRef]
- Vu-Van, H.; Koo, I. A robust cooperative spectrum sensing based on Kullback-Leibler divergence. IEICE Trans. Commun. 2012, 95, 1286–1290. [Google Scholar] [CrossRef]
- Gul, N.; Qureshi, I.M.; Akbar, S.; Kamran, M.; Rasool, I. One-to-Many Relationship Based Kullback Leibler Divergence against Malicious Users in Cooperative Spectrum Sensing. Wirel. Commun. Mob. Comput. 2018, 2018, 3153915. [Google Scholar] [CrossRef]
- Miah, M.S.; Schukat, M.; Barrett, E. Maximization of sum rate in AF-cognitive radio networks using superposition approach and n-out-of-k rule. In Proceedings of the 2017 28th Irish Signals and Systems Conference (ISSC), Killarney, Ireland, 20–21 June 2017; pp. 1–6. [Google Scholar]
- Jan, S.U.; Vu, V.H.; Koo, I. Throughput maximization using an SVM for multi-class hypothesis-based spectrum sensing in cognitive radio. Appl. Sci. 2018, 8, 421. [Google Scholar] [CrossRef]
- Kieu-Xuan, T.; Koo, I. A Cooperative Spectrum Sensing Scheme Using Fuzzy Logic for Cognitive Radio Networks. KSII Trans. Internet Inf. Syst. 2010, 4, 289–304. [Google Scholar] [CrossRef]
- Awin, F.; Salout, N.; Abdel-Raheem, E. Combined Fusion Rules in Cognitive Radio Networks Using Different Threshold Strategies. Appl. Sci. 2019, 9, 5080. [Google Scholar] [CrossRef]
- Simon, M.K.; Alouini, M.S. Digital Communication over Fading Channels; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The total number of CR-IoT users M | 12 |
| Sampling frequency | 300 kHz |
| Sensing time slot | 300 ms |
| Reporting time slot | 5 ms |
| PU’s signal | BPSK |
| 10 dB | |
| 7 dB | |
| Global decision threshold | 3 |
| Number of samples | [20, 25, 30] |
| Primary activity factor | 0.7 |
| Average SNR | −6 dB |
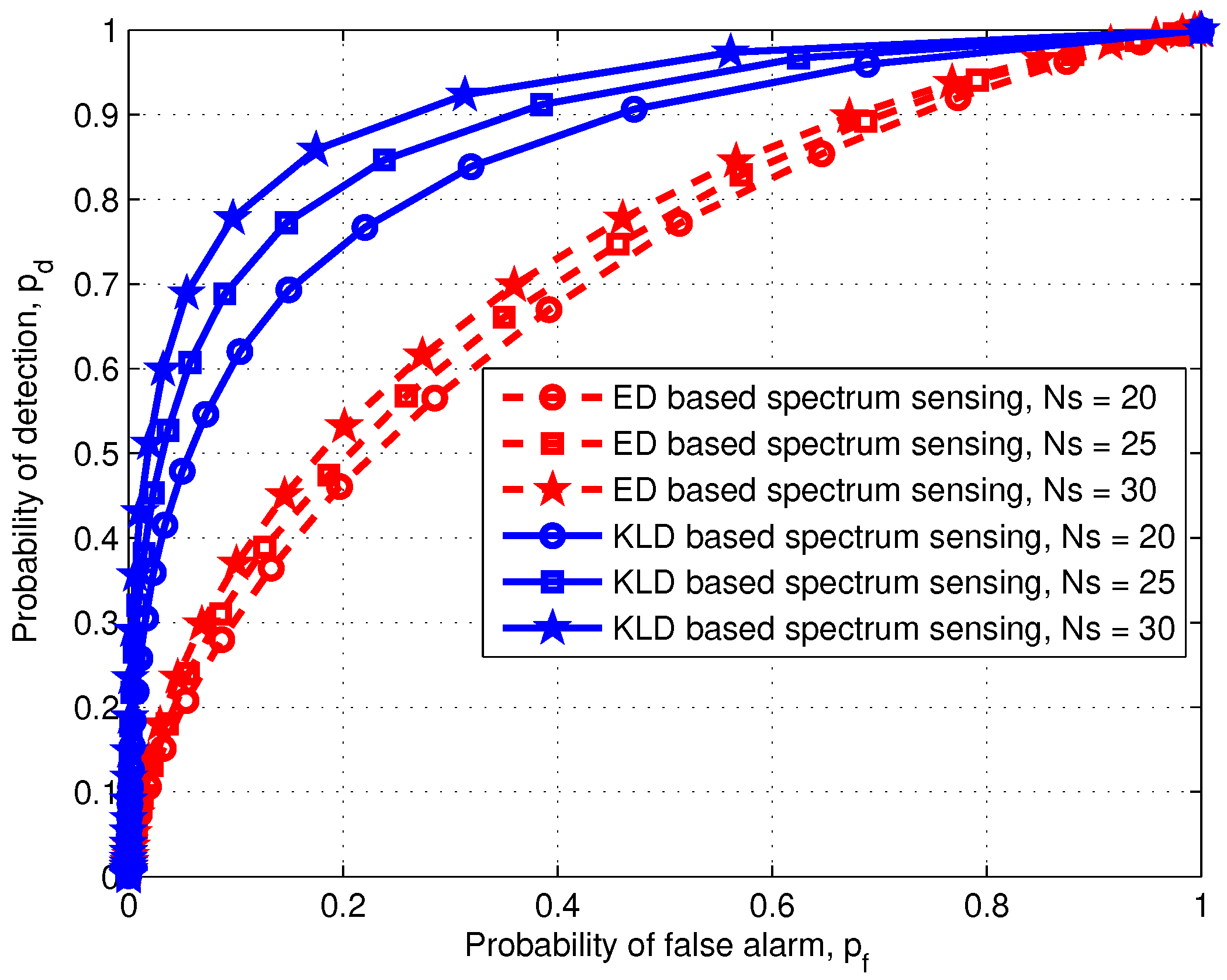
| The number of samples in sensing phase | |||
| Probability of detection | 0.46 | 0.50 | 0.53 |
| Probability of detection | 0.75 | 0.81 | 0.89 |
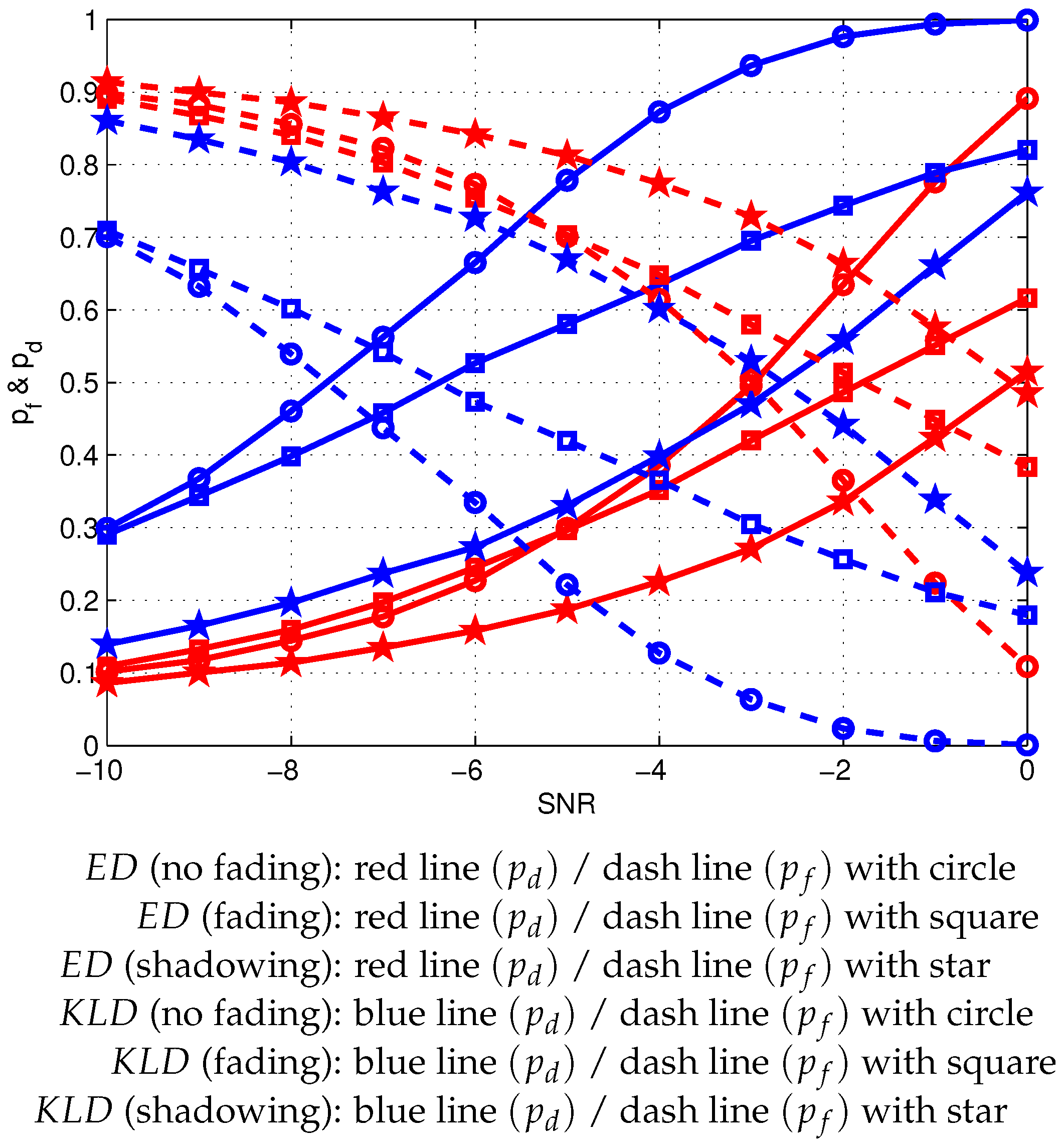
| SNR of sensing link () | dB | dB | dB | dB | dB | 0 dB |
| Probability of detection | 0.09 | 0.11 | 0.16 | 0.22 | 0.33 | 0.51 |
| Probability of false alarm | 0.91 | 0.89 | 0.84 | 0.78 | 0.67 | 0.49 |
| Probability of detection | 0.12 | 0.20 | 0.29 | 0.40 | 0.56 | 0.78 |
| Probability of false alarm | 0.87 | 0.80 | 0.72 | 0.60 | 0.43 | 0.23 |
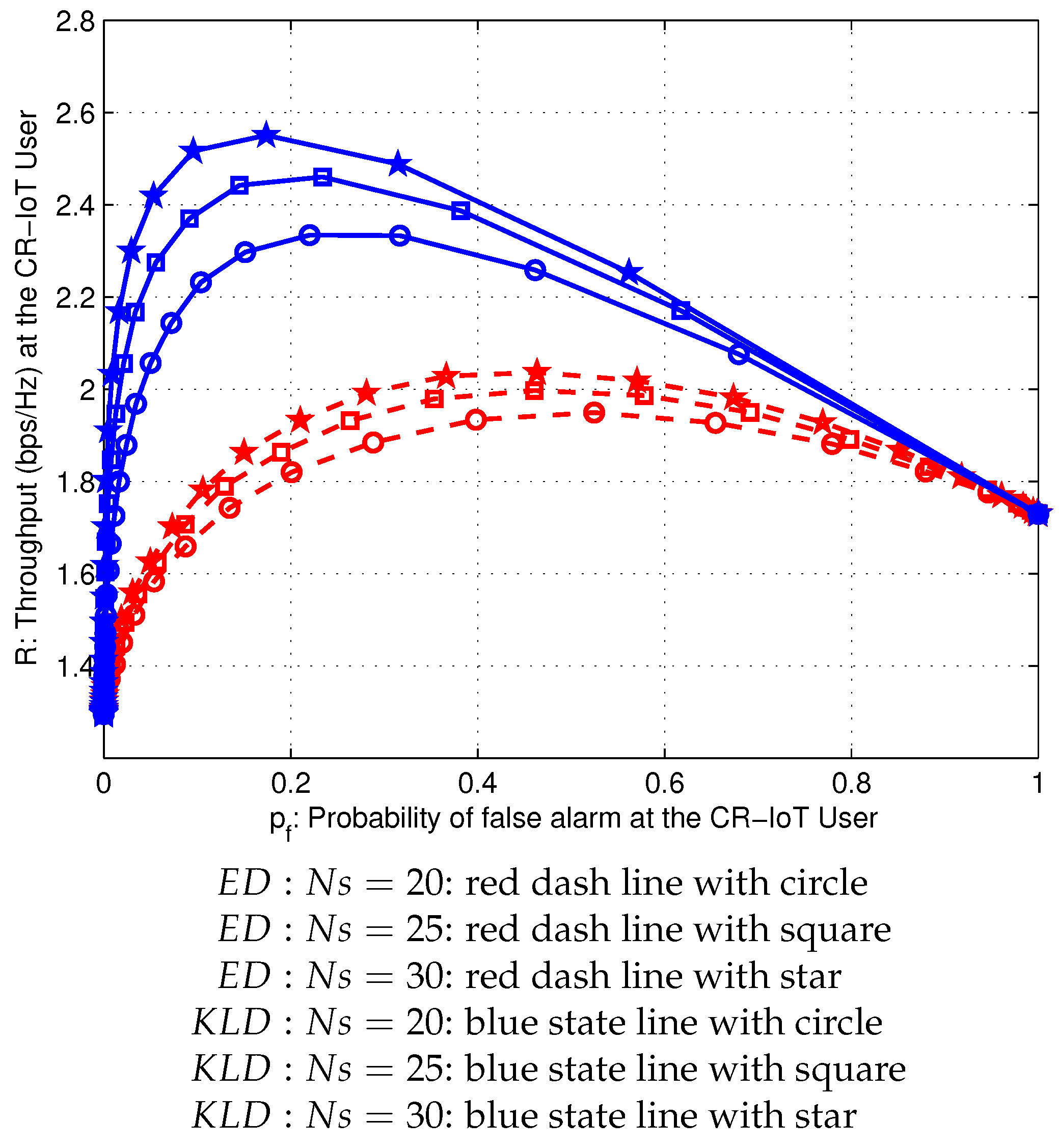
| Number of samples in sensing phase | |||
| Conventional scheme sum rate | 1.8 bps/Hz | 1.83 bps/Hz | 1.98 bps/Hz |
| Proposed scheme sum rate | 2.30 bps/Hz | 2.49 bps/Hz | 2.58 bps/Hz |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miah, M.S.; Ahmed, K.M.; Islam, M.K.; Mahmud, M.A.R.; Rahman, M.M.; Yu, H. Enhanced Sensing and Sum-Rate Analysis in a Cognitive Radio-Based Internet of Things. Sensors 2020, 20, 2525. https://doi.org/10.3390/s20092525
Miah MS, Ahmed KM, Islam MK, Mahmud MAR, Rahman MM, Yu H. Enhanced Sensing and Sum-Rate Analysis in a Cognitive Radio-Based Internet of Things. Sensors. 2020; 20(9):2525. https://doi.org/10.3390/s20092525
Chicago/Turabian StyleMiah, Md. Sipon, Kazi Mowdud Ahmed, Md. Khairul Islam, Md. Ashek Raihan Mahmud, Md. Mahbubur Rahman, and Heejung Yu. 2020. "Enhanced Sensing and Sum-Rate Analysis in a Cognitive Radio-Based Internet of Things" Sensors 20, no. 9: 2525. https://doi.org/10.3390/s20092525
APA StyleMiah, M. S., Ahmed, K. M., Islam, M. K., Mahmud, M. A. R., Rahman, M. M., & Yu, H. (2020). Enhanced Sensing and Sum-Rate Analysis in a Cognitive Radio-Based Internet of Things. Sensors, 20(9), 2525. https://doi.org/10.3390/s20092525