Automatic Irrigation Scheduling on a Hedgerow Olive Orchard Using an Algorithm of Water Balance Readjusted with Soil Moisture Sensors

 ,
,  ,
, 

Abstract
1. Introduction
2. Materials and Methods
2.1. Site Description and Experimental Design
2.2. Characterization of Spatial Variability of the Plot, Selection of Control Points and Soil Analysis
- Zone 1 (T1): where the ECa and NDVI values were medium or high. The sampling points 1 and 2 were found in this zone.
- Zone 2 (T2): where the ECa and NDVI values were low. The sampling points 3 and 4 were found in this zone.
- Zone 3 (CR): where the ECa values were low and the NDVI values were medium or high. The sampling control points CR1, CR2, CR3 and CR4 were found in this zone.
2.3. Decision Support System (DSS)
- (a)
- Sensors installed in the field: to monitor the soil moisture, 10 HS capacitive moisture sensors (Decagon Devices Inc., Pullman, WA, USA) were installed at different positions (position A and position B) (Figure 2) in the different control points selected (CR1, CR2, CR3 and CR4). Two drippers were monitored at each control point. Four moisture sensors were placed under each dripper in the position A, two at a depth of 0.30 m and the others at a depth of 0.60 m. In addition, one measure sensor was situated between the two drippers in the position B at a depth of 0.30 m (Figure 2). These 5 moisture sensors were installed in each of the control points (CR1, CR2 and CR3) in 2016, making a total of 15 sensors. In 2017, the number of soil moisture sensors was increased from 15 to 20, as a new control point was added (CR4). When an error was detected in any of the sensors that had been installed, that sensor was automatically replaced with another in the same position.
- (b)
- IRRIX is a cloud-hosted web platform that carries out the following daily tasks:
- Data collection of sensors installed in the field (Figure 3). IRRIX downloads sensor data at periodic intervals throughout the day and at the user’s request.
- Analysis of all data and calculation of irrigation water volumes. Once a day, IRRIX analyses the set of data to determine the irrigation dose using the information provided by the moisture sensors. To achieve this, this tool integrates an algorithm which combines a WB-based estimation of crop water needs (feed-forward control) with readjustment based on sensor readings (feedback control). [25,28,44]
- Irrigation scheduling. IRRIX sends the updated irrigation doses to the datalogger. Then, this device orders the activation of the rest of the equipment (solenoid valve or pumps, etc.) to apply the required irrigation doses.
- Interaction with users. IRRIX is an autonomous system whose main objective is to free the user from work. The main function of the user is to check that the system has worked correctly. Logically, if there is any anomaly in the system it has to be resolved by the user.
2.4. Irrigation Scheduling
- In 2015, all the plot zones were irrigated according to the criteria of the farmer.
- In 2016, all the plot zones were irrigated according to expert technical criteria [45]. In the T1 and T2 zones, the irrigation scheduling was under human control (non-automatic irrigation scheduling, NAIS). Irrigation was controlled by solenoid valves operated by a commercial automaton, Agronic 4000 (Sistemes Electrònics Progrés, Palau d’Anglesola, Lleida, Spain), which was programmed remotely, every Monday, using the desktop application provided by the manufacturer. The CR1, CR2 and CR3 control points were irrigated automatically through the IRRIX system (automatic irrigation scheduling, AIS), without human intervention. The scheduled irrigation dose was independent at each control point. The irrigation criterion was the same in both cases: a light RDI to preserve oil yield.
- ○
- ○
- ○
- In 2017, irrigation scheduling was similar to that of the previous year, but one more control point was added (CR4) where automatic irrigation was also carried out. As in the other CR points, the CR4 irrigation scheduling was carried out independently. The CR1 and CR2 automatic irrigation scheduling was carried out in the DSS on the basis of the information provided by the sensors located in CR2. In accordance with the evolution of Ψstem, a series of adjustments were made in 2017 in relation to the seasonal plan (due to the fact that this year was unusually dry) and the soil comfort zone in relation to the sensor readings. This soil comfort zone specifies to the control system the acceptable range for the soil moisture sensor measurements and their pre-established boundaries were empirically readjusted to fit with the observed range.
2.5. Physiological and Agronomic Measurements
2.5.1. Water Status and Canopy Volume
2.5.2. Yield Data and Oil Content
2.6. Statistical Analysis
3. Results and Discussion
3.1. Climatic Conditions
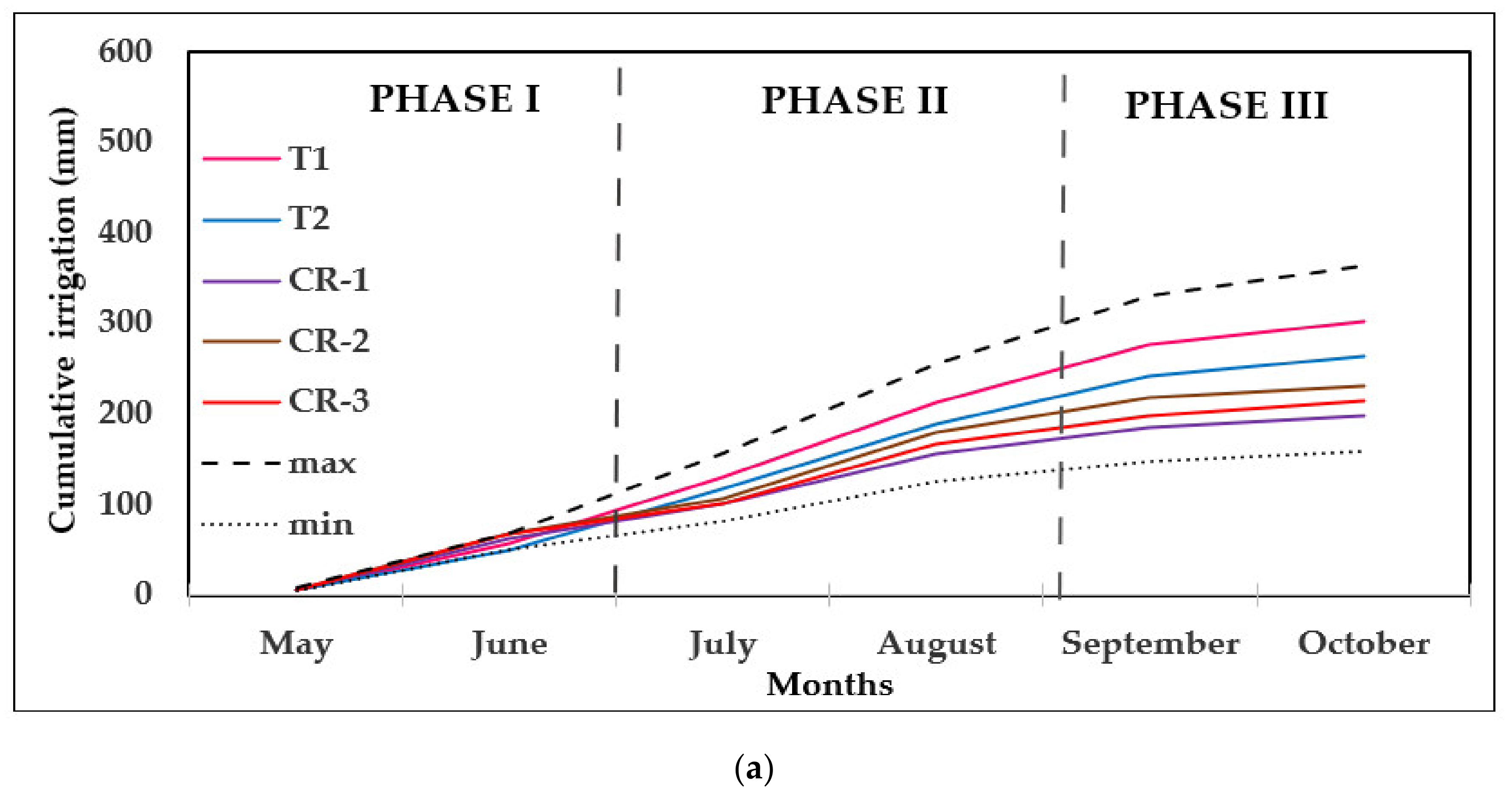
3.2. Applied Water
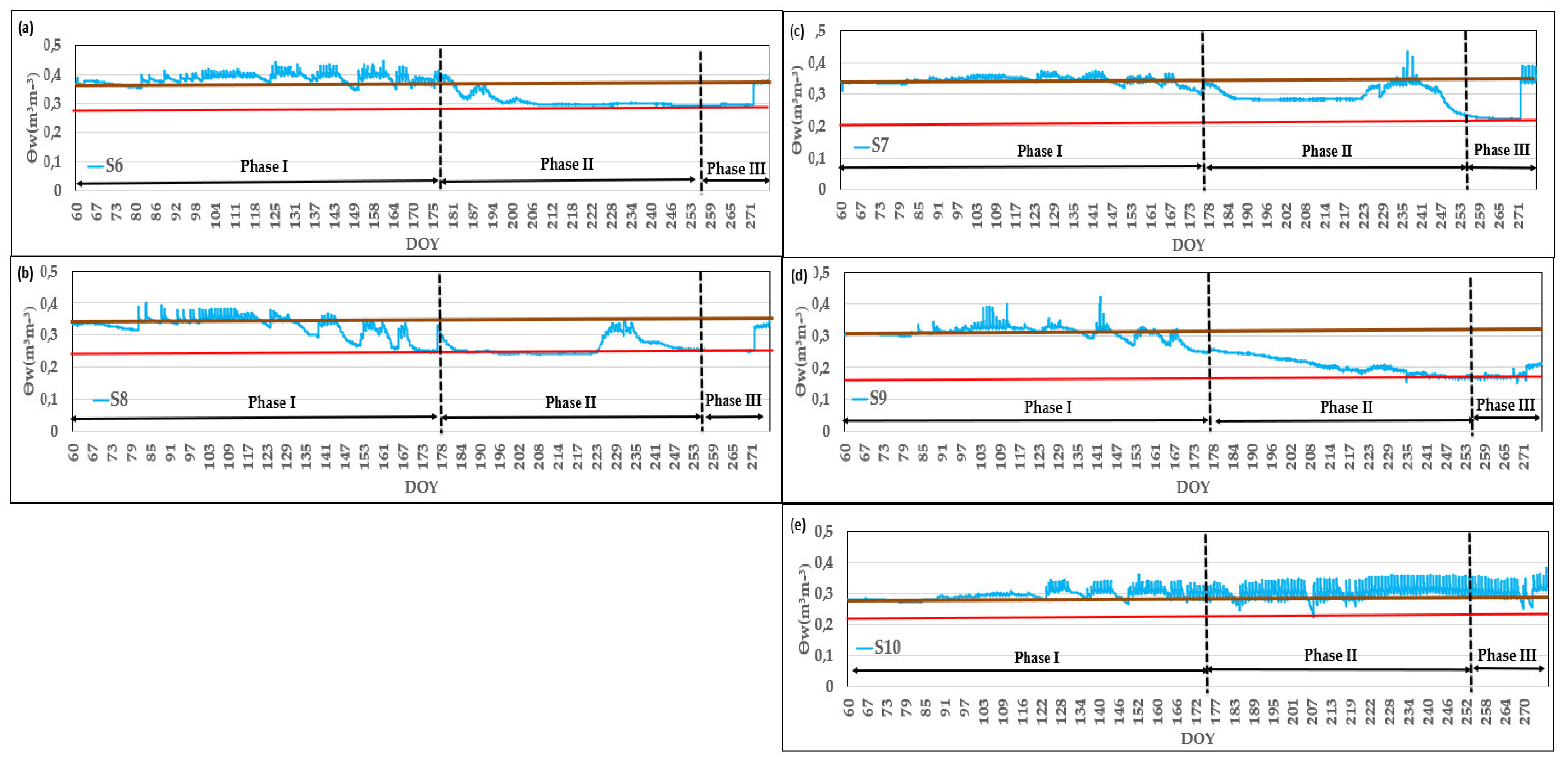
3.3. Soil Water Content
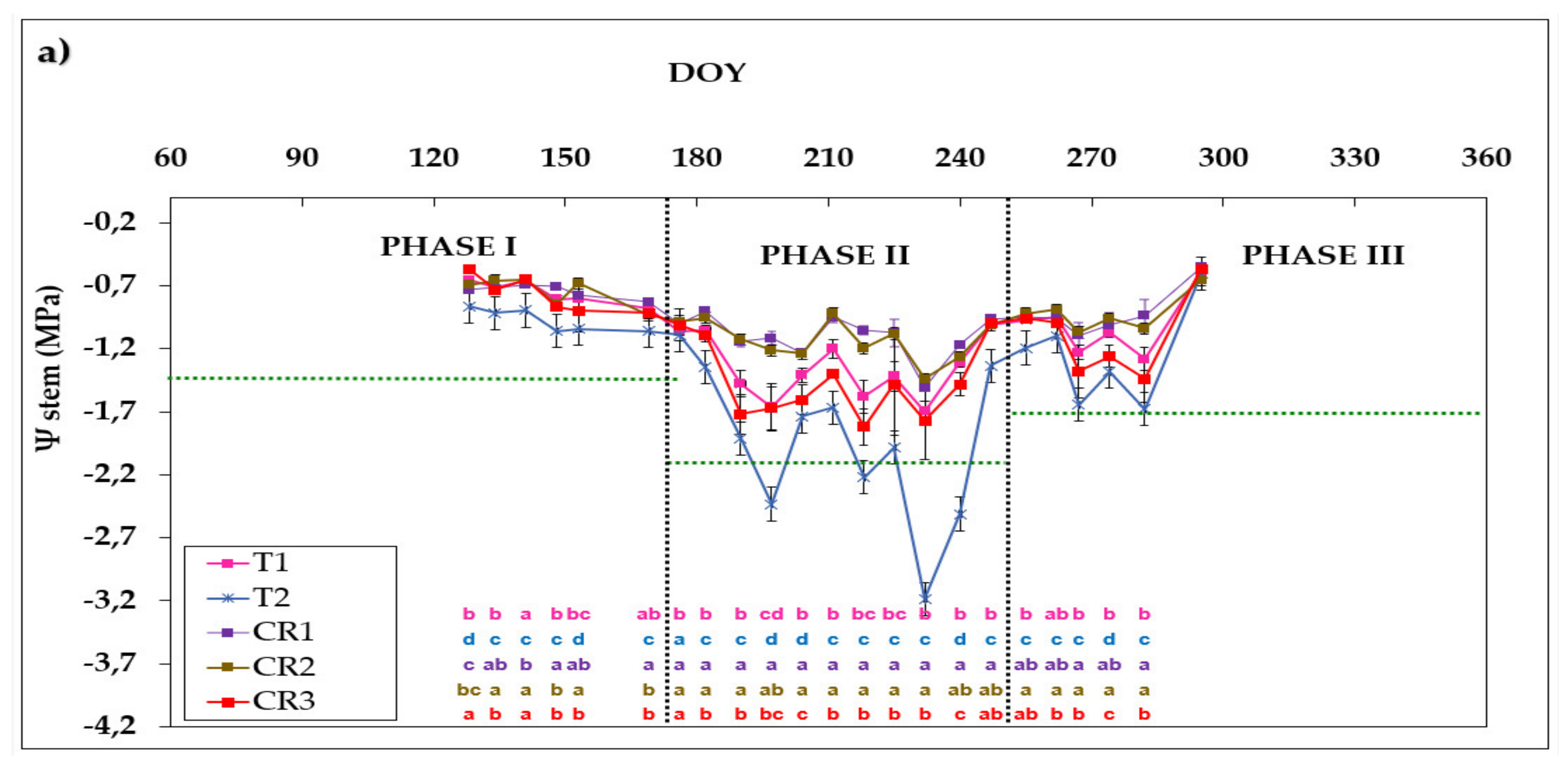
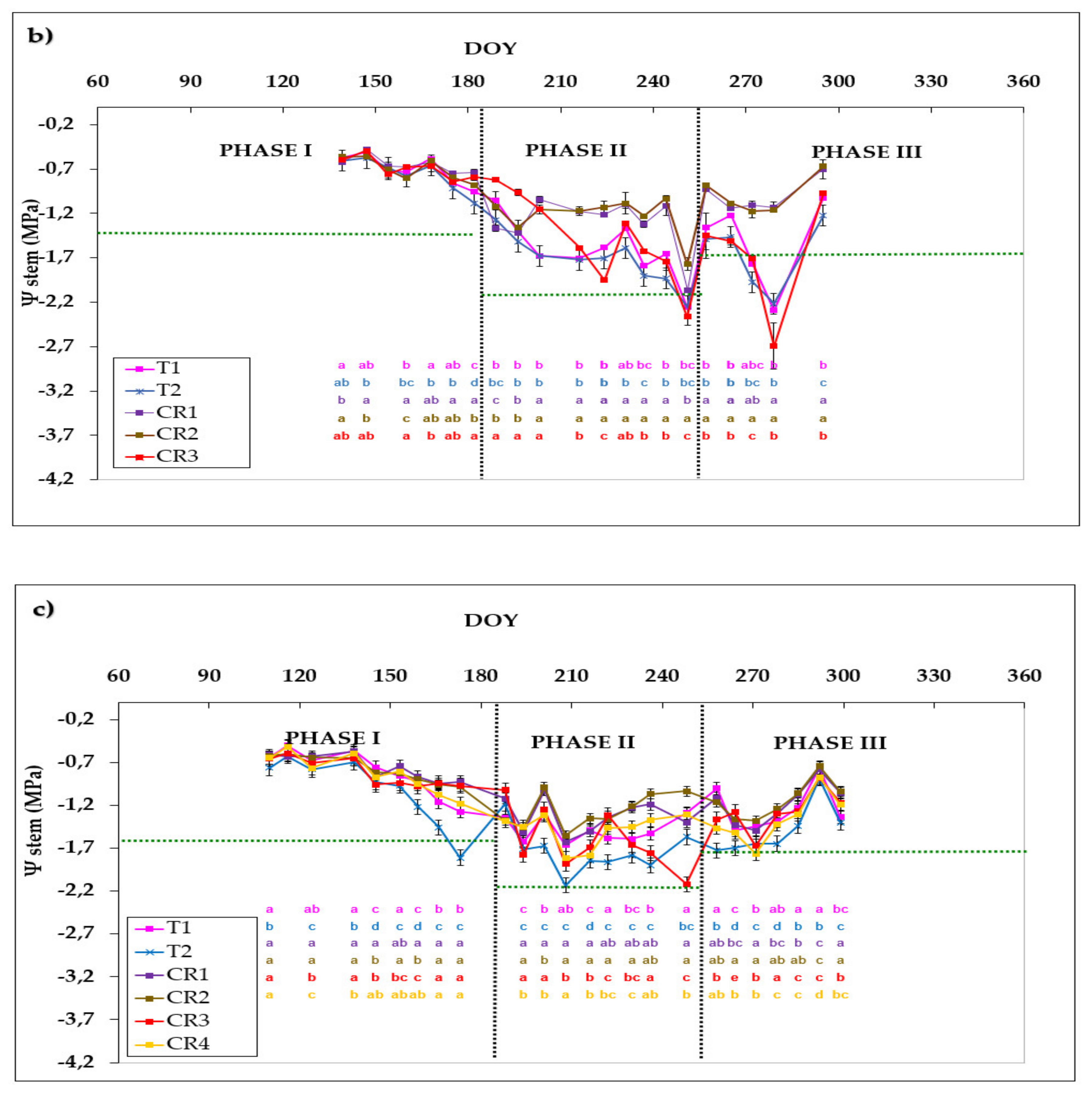
3.4. Crop Water Status and Productivity
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Marra, F.P.; Marino, G.; Marchese, A.; Caruso, T. Effects of different irrigation regimes on a super-high-density olive grove cv. “Arbequina”: Vegetative growth, productivity and polyphenol content of the oil. Irrig. Sci. 2016, 34, 313–325. [Google Scholar] [CrossRef]
- Bongi, G.; Palliotti, A.O. Temperate Crops Volume I. In Handbook of Environmental Physiology of Fruit Crops; Shaffer, B., Anderson, P.C., Eds.; CRC Press Inc.: Boca Raton, FL, USA, 1994. [Google Scholar]
- Vossen, P. The Potential for Super-High-Density Olive Oil Orchards in California. Olint Mag. 2002, 1. [Google Scholar]
- Connor, D.J.; Fereres, E. The Physiology of Adaptation and Yield Expression in Olive. Hortic. Rev. 2010, 31, 155–229. [Google Scholar] [CrossRef]
- Cuevas, M.V.; Martín-Palomo, M.J.; Diaz-Espejo, A.; Torres-Ruiz, J.M.; Rodriguez-Dominguez, C.M.; Perez-Martin, A.; Mejías, R.P.; Fernández, J. Assessing water stress in a hedgerow olive orchard from sap flow and trunk diameter measurements. Irrig. Sci. 2012, 31, 729–746. [Google Scholar] [CrossRef]
- Trentacoste, E.R.; Calderon, F.J.; Contreras-Zanessi, O.; Galarza, W.; Banco, A.P.; Puertas, C.M. Effect of Regulated Deficit Irrigation during the Vegetative Growth Period on Shoot Elongation and Oil Yield Components in Olive Hedgerows (Cv. Arbosana) Pruned Annually on Alternate Sides in San Juan, Argentina. Irrig. Sci. 2019, 37, 533–546. [Google Scholar] [CrossRef]
- Romero, R.; Muriel, J.; Garcia, I.; De La Peña, D.M. Research on automatic irrigation control: State of the art and recent results. Agric. Water Manag. 2012, 114, 59–66. [Google Scholar] [CrossRef]
- Singh, A. Conjunctive use of water resources for sustainable irrigated agriculture. J. Hydrol. 2014, 519, 1688–1697. [Google Scholar] [CrossRef]
- Campo, M.G.-D. Summer deficit-irrigation strategies in a hedgerow olive orchard cv. ‘Arbequina’: Effect on fruit characteristics and yield. Irrig. Sci. 2011, 31, 259–269. [Google Scholar] [CrossRef]
- Girona, J.; Mata, M.; Goldhamer, D.; Johnson, R.; DeJong, T. Patterns of Soil and Tree Water Status and Leaf Functioning during Regulated Deficit Irrigation Scheduling in Peach. J. Am. Soc. Hortic. Sci. 1993, 118, 580–586. [Google Scholar] [CrossRef]
- Rowland, D.L.; Faircloth, W.H.; Payton, P.; Tissue, D.; Ferrell, J.A.; Sorensen, R.B.; Butts, C.L. Primed acclimation of cultivated peanut (Arachis hypogaea L.) through the use of deficit irrigation timed to crop developmental periods. Agric. Water Manag. 2012, 113, 85–95. [Google Scholar] [CrossRef]
- Moriana, A.; Pérez-López, D.; Prieto, M.; Ramírez-Santa-Pau, M.; Rodríguez, J.M.P. Midday stem water potential as a useful tool for estimating irrigation requirements in olive trees. Agric. Water Manag. 2012, 112, 43–54. [Google Scholar] [CrossRef]
- Iniesta, F.; Testi, L.; Orgaz, F.; Villalobos, F. The effects of regulated and continuous deficit irrigation on the water use, growth and yield of olive trees. Eur. J. Agron. 2009, 30, 258–265. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration-Guidelines for Computing Crop. Water Requirements-FAO Irrigation and Drainage Paper 56; FAO: Rome, Italy, 1998; Volume 300, p. D05109. [Google Scholar]
- Miller, L.; Vellidis, G.; Coolong, T. Comparing a Smartphone Irrigation Scheduling Application with Water Balance and Soil Moisture-based Irrigation Methods: Part II—Plasticulture-grown Watermelon. Hort Technol. 2018, 28, 362–369. [Google Scholar] [CrossRef]
- Amayreh, J.; Al-Abed, N. Developing crop coefficients for field-grown tomato (Lycopersicon esculentum Mill.) under drip irrigation with black plastic mulch. Agric. Water Manag. 2005, 73, 247–254. [Google Scholar] [CrossRef]
- Vienken, T.; Reboulet, E.; Leven, C.; Kreck, M.; Zschornack, L.; Dietrich, P. Field comparison of selected methods for vertical soil water content profiling. J. Hydrol. 2013, 501, 205–212. [Google Scholar] [CrossRef]
- Dabach, S.; Shani, U.; Lazarovitch, N. Optimal tensiometer placement for high-frequency subsurface drip irrigation management in heterogeneous soils. Agric. Water Manag. 2015, 152, 91–98. [Google Scholar] [CrossRef]
- Elmaloglou, S.; Soulis, K. The Effect of Hysteresis on Soil Water Dynamics during Surface Trickle Irrigation in Layered Soils. Glob. Nest J. 2013, 15, 351–365. [Google Scholar]
- Luthra, S.; Kaledonkar, M.; Singh, O.; Tyagi, N. Design and development of an auto irrigation system. Agric. Water Manag. 1997, 33, 169–181. [Google Scholar] [CrossRef]
- Miranda, F.; Yoder, R.; Wilkerson, J.; Odhiambo, L. An autonomous controller for site-specific management of fixed irrigation systems. Comput. Electron. Agric. 2005, 48, 183–197. [Google Scholar] [CrossRef]
- Cáceres, R.; Casadesus, J.; Marfà, O. Adaptation of an Automatic Irrigation-control Tray System for Outdoor Nurseries. Biosyst. Eng. 2007, 96, 419–425. [Google Scholar] [CrossRef]
- Boutraa, T.; Akhkha, A.; Alshuaibi, A.; Atta, R. Evaluation of the effectiveness of an automated irrigation system using wheat crops. Agric. Boil. J. North. Am. 2011, 2, 80–88. [Google Scholar] [CrossRef]
- Bacci, L.; Battista, P.; Rapi, B. An integrated method for irrigation scheduling of potted plants. Sci. Hortic. 2008, 116, 89–97. [Google Scholar] [CrossRef]
- Casadesus, J.; Mata, M.; Marsal, J.; Girona, J. A general algorithm for automated scheduling of drip irrigation in tree crops. Comput. Electron. Agric. 2012, 83, 11–20. [Google Scholar] [CrossRef]
- Osroosh, Y.; Peters, R.T.; Campbell, C.S.; Zhang, Q. Comparison of irrigation automation algorithms for drip-irrigated apple trees. Comput. Electron. Agric. 2016, 128, 87–99. [Google Scholar] [CrossRef]
- Saab, M.T.A.; Jomaa, I.; Skaf, S.; Fahed, S.; Todorović, M. Assessment of a Smartphone Application for Real-Time Irrigation Scheduling in Mediterranean Environments. Water 2019, 11, 252. [Google Scholar] [CrossRef]
- Millán, S.; Casadesús, J.; Moñino, M.J.; Moñino, J.; Prieto, M.H.; Moñino, M.J.; Prieto, M.H. Using Soil Moisture Sensors for Automated Irrigation Scheduling in a Plum Crop. Water 2019, 11, 2061. [Google Scholar] [CrossRef]
- Fortes, R.; Millán, S.; Prieto, M.H.; Campillo, C. A methodology based on apparent electrical conductivity and guided soil samples to improve irrigation zoning. Precis. Agric. 2015, 16, 441–454. [Google Scholar] [CrossRef]
- Berni, J.; Zarco-Tejada, P.; Suárez, L.; González-Dugo, V.; Fereres, E. Remote Sensing of Vegetation from UAV Platforms using Lightweight Multispectral and Thermal Imaging Sensors. Int. Arch. Photogramm. Remote Sens. Spatial Inform. Sci. 2009, 38, 6. [Google Scholar]
- Pedrera-Parrilla, A.; Martínez, G.; Espejo-Pérez, A.J.; Gomez, J.A.; Giráldez, J.V.; Vanderlinden, K.; García-Tejero, I.F. Mapping impaired olive tree development using electromagnetic induction surveys. Plant. Soil 2014, 384, 381–400. [Google Scholar] [CrossRef]
- Moral, F.J.; Terrón, J.; Da Silva, J.M. Delineation of management zones using mobile measurements of soil apparent electrical conductivity and multivariate geostatistical techniques. Soil Tillage Res. 2010, 106, 335–343. [Google Scholar] [CrossRef]
- Hall, A.; Wilson, M.A. Object-based analysis of grapevine canopy relationships with winegrape composition and yield in two contrasting vineyards using multitemporal high spatial resolution optical remote sensing. Int. J. Remote Sens. 2012, 34, 1772–1797. [Google Scholar] [CrossRef]
- Martínez-Casasnovas, J.A.; Agelet-Fernandez, J.; Arnó, J.; Ramos, M.C. Analysis of vineyard differential management zones and relation to vine development, grape maturity and quality. Span. J. Agric. Res. 2012, 10, 326. [Google Scholar] [CrossRef]
- Sibanda, M.; Mutanga, O.; Rouget, M. Examining the potential of Sentinel-2 MSI spectral resolution in quantifying above ground biomass across different fertilizer treatments. ISPRS J. Photogramm. Remote Sens. 2015, 110, 55–65. [Google Scholar] [CrossRef]
- Thenkabail, P.S. Biophysical and yield information for precision farming from near-real-time and historical Landsat TM images. Int. J. Remote. Sens. 2003, 24, 2879–2904. [Google Scholar] [CrossRef]
- Testa, S. Correcting MODIS 16-day composite NDVI time-series with actual acquisition dates. Eur. J. Remote Sens. 2014, 47, 285–305. [Google Scholar] [CrossRef]
- Plant, R.E. Site-specific management: The application of information technology to crop production. Comput. Electron. Agric. 2001, 30, 9–29. [Google Scholar] [CrossRef]
- Gomez, J.A.; Zarco-Tejada, P.J.; García-Morillo, J.; Gama, J.; Soriano, M.A. Determining Biophysical Parameters for Olive Trees Using CASI-Airborne and Quickbird-Satellite Imagery. Agron. J. 2011, 103, 644–654. [Google Scholar] [CrossRef]
- Millán, S.; Moral, F.J.; Prieto, M.H.; Pérez-Rodriguez, J.M.; Campillo, C. Mapping Soil Properties and Delineating Management Zones Based on Electrical Conductivity in a Hedgerow Olive Grove. Trans. ASABE 2019, 62, 749–760. [Google Scholar] [CrossRef]
- Bouyoucos, G.J. Directions for Making Mechanical Analyses of Soils by the Hydrometer Method. Soil Sci. 1936, 42, 225–230. [Google Scholar] [CrossRef]
- Egnér, H.; Riehm, H.; Domingo, W. Untersuchungen Über Die Chemische Bodenanalyse Als Grundlage Für Die Beurteilung Des Nährstoffzustandes Der Böden. II. Chemische Extraktionsmethoden Zur Phosphor-Und Kaliumbestimmung. Kungliga Lantbrukshögskolans Annaler 1960, 26, 199–215. [Google Scholar]
- Walkley, A.; Black, I.A. An Examination of the Degtjareff Method for Determining Soil Organic Matter, and a Proposed Modification of the Chromic Acid Titration Method. Soil Sci. 1934, 37, 29–38. [Google Scholar] [CrossRef]
- Niño, J.M.D.; Oliver-Manera, J.; Girona, J.; Casadesús, J. Differential irrigation scheduling by an automated algorithm of water balance tuned by capacitance-type soil moisture sensors. Agric. Water Manag. 2020, 228, 105880. [Google Scholar] [CrossRef]
- Pérez-Rodríguez, J.; Parras-Cintero, J. Manual Práctico De Riego Del Olivar De Almazara; CICYTEX: Badajoz, Spain, 2014. [Google Scholar]
- Hargreaves, G.H.; Allen, R.G. History and Evaluation of Hargreaves Evapotranspiration Equation. J. Irrig. Drain. Eng. 2003, 129, 53–63. [Google Scholar] [CrossRef]
- Orgaz, F.; Testi, L.; Villalobos, F.; Fereres, E. Water requirements of olive orchards–II: Determination of crop coefficients for irrigation scheduling. Irrig. Sci. 2005, 24, 77–84. [Google Scholar] [CrossRef]
- Shackel, K.A.; Ahmadi, H.; Biasi, W.; Buchner, R.; Goldhamer, D.; Gurusinghe, S.; Hasey, J.; Kester, D.; Krueger, B.; Lampinen, B.; et al. Plant Water Status as an Index of Irrigation Need in Deciduous Fruit Trees. Hort Technol. 1997, 7, 23–29. [Google Scholar] [CrossRef]
- Guzmán, E.C.; Baeten, V.; Pierna, J.A.F.; García-Mesa, J.A. Determination of the olive maturity index of intact fruits using image analysis. J. Food Sci. Technol. 2013, 52, 1462–1470. [Google Scholar] [CrossRef]
- EEC. Characteristics of Olive and Olive Pomace Oils and their Analytical Methods. Regulation EEC/2568/1991. Offic. J. Eur. Commun. 1991, 248, 1–82. [Google Scholar]
- Kang, S.; Van Iersel, M.W.; Kim, J. Plant root growth affects FDR soil moisture sensor calibration. Sci. Hortic. 2019, 252, 208–211. [Google Scholar] [CrossRef]
- Kizito, F.; Campbell, C.; Campbell, G.; Cobos, D.; Teare, B.; Carter, B.; Hopmans, J.W. Frequency, electrical conductivity and temperature analysis of a low-cost capacitance soil moisture sensor. J. Hydrol. 2008, 352, 367–378. [Google Scholar] [CrossRef]
- Mittelbach, H.; Lehner, I.; Seneviratne, S.I. Comparison of four soil moisture sensor types under field conditions in Switzerland. J. Hydrol. 2012, 430, 39–49. [Google Scholar] [CrossRef]
- Moriana, A.; Orgaz, F.; Pastor, M.; Fereres, E. Yield Responses of a Mature Olive Orchard to Water Deficits. J. Am. Soc. Hortic. Sci. 2003, 128, 425–431. [Google Scholar] [CrossRef]
- Grattan, S.; Berenguer, M.; Connell, J.; Polito, V.; Vossen, P. Olive oil production as influenced by different quantities of applied water. Agric. Water Manag. 2006, 85, 133–140. [Google Scholar] [CrossRef]
- Tognetti, R.; D’Andria, R.; Lavini, A.; Morelli, G. The effect of deficit irrigation on crop yield and vegetative development of Olea europaea L. (cvs. Frantoio and Leccino). Eur. J. Agron. 2006, 25, 356–364. [Google Scholar] [CrossRef]
- Moriana, A.; Pérez-López, D.; Gómez-Rico, A.; Salvador, M.D.; Olmedilla, N.; Ribas, F.; Fregapane, G. Irrigation scheduling for traditional, low-density olive orchards: Water relations and influence on oil characteristics. Agric. Water Manag. 2007, 87, 171–179. [Google Scholar] [CrossRef]
- Fernández, J.; Green, S.; Caspari, H.W.; Diaz-Espejo, A.; Cuevas, M.V. The use of sap flow measurements for scheduling irrigation in olive, apple and Asian pear trees and in grapevines. Plant. Soil 2007, 305, 91–104. [Google Scholar] [CrossRef]
- Correa-Tedesco, G.; Rousseaux, M.C.; Searles, P. Plant growth and yield responses in olive (Olea europaea) to different irrigation levels in an arid region of Argentina. Agric. Water Manag. 2010, 97, 1829–1837. [Google Scholar] [CrossRef]
- Campo, M.G.-D. Physiological and Growth Responses to Irrigation of a Newly Established Hedgerow Olive Orchard. Hort Sci. 2010, 45, 809–814. [Google Scholar] [CrossRef]
- Fernández, J.; Perez-Martin, A.; Torres-Ruiz, J.M.; Cuevas, M.V.; Rodriguez-Dominguez, C.M.; Elsayed-Farag, S.; Sillero, A.M.M.; García, J.; Hernandez-Santana, V.; Diaz-Espejo, A. A regulated deficit irrigation strategy for hedgerow olive orchards with high plant density. Plant. Soil 2013, 372, 279–295. [Google Scholar] [CrossRef]
- Rosecrance, R.C.; Krueger, W.H.; Milliron, L.; Bloese, J.; Garcia, C.; Mori, B. Moderate Regulated Deficit Irrigation can Increase Olive Oil Yields and Decrease Tree Growth in Super High Density ‘Arbequina’ Oolive Orchards. Sci. Hortic. 2015, 190, 75–82. [Google Scholar] [CrossRef]
- Hernandez-Santana, V.; Fernández, J.; Cuevas, M.; Perez-Martin, A.; Diaz-Espejo, A. Photosynthetic limitations by water deficit: Effect on fruit and olive oil yield, leaf area and trunk diameter and its potential use to control vegetative growth of super-high density olive orchards. Agric. Water Manag. 2017, 184, 9–18. [Google Scholar] [CrossRef]
- Connor, D.J.; Campo, M.G.-D.; Rousseaux, M.C.; Searles, P. Structure, management and productivity of hedgerow olive orchards: A review. Sci. Hortic. 2014, 169, 71–93. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Points | Depth(m) | Sand (%) | Clay (%) | Silt (%) | Texture | OM (%) | pH |
|---|---|---|---|---|---|---|---|
| 1 | 0.00–0.30 | 43.91 | 29.72 | 26.37 | clay-loam | 1.18 | 7.87 |
| 0.30–0.60 | 64.47 | 5.25 | 30.28 | sandy loam | 0.53 | 6.27 | |
| 2 | 0.00–0.30 | 72.05 | 4.43 | 23.52 | sandy loam | 1.16 | 6.83 |
| 0.30–0.60 | 72.39 | 4.04 | 23.57 | sandy loam | 0.97 | 6.43 | |
| 3 | 0.00–0.30 | 72.26 | 2.30 | 25.44 | sandy loam | 0.44 | 7.87 |
| 0.30–0.60 | 73.65 | 3.65 | 22.7 | sandy loam | 0.43 | 6.93 | |
| 4 | 0.00–0.30 | 72.88 | 7.44 | 19.68 | sandy loam | 0.51 | 6.45 |
| 0.30–0.60 | 71.28 | 3.62 | 25.1 | sandy loam | 0.46 | 6.14 | |
| CR1 | 0.00–0.30 | 64.77 | 12.6 | 22.63 | sandy loam | 0.68 | 7.01 |
| 0.30–0.60 | 65.81 | 15.31 | 18.88 | sandy loam | 0.55 | 6.87 | |
| CR2 | 0.00–0.30 | 64.84 | 15.81 | 19.35 | sandy loam | 0.54 | 7.15 |
| 0.30–0.60 | 64.64 | 15.69 | 19.67 | sandy loam | 0.44 | 6.86 | |
| CR3 | 0.00–0.30 | 63.66 | 8.13 | 28.21 | sandy loam | 0.94 | 6.66 |
| 0.30–0.60 | 61.79 | 9.02 | 29.19 | sandy loam | 0.82 | 6.65 | |
| CR4 | 0.00–0.30 | 75.72 | 6.87 | 17.41 | sandy loam | 0.48 | 5.40 |
| 0.30–0.60 | 74.25 | 5.60 | 20.15 | sandy loam | 0.46 | 5.58 |
| Year | T1 | T2 | CR1 | CR2 | CR3 | CR4 |
|---|---|---|---|---|---|---|
| 2015 | Farmer | Farmer | Farmer | Farmer | Farmer | |
| 2016 | NAIS | NAIS | AIS | AIS | AIS | |
| 2017 | NAIS | NAIS | AIS | AIS | AIS | AIS |
| Year | Phases | Tmean | RHmean | Rainfall | ETo-PM | ETo-H | ETc |
|---|---|---|---|---|---|---|---|
| (°C) | (%) | (mm) | (mm) | (mm) | (mm) | ||
| Phase I | 17.8 | 63.1 | 99.1 | 559.2 | 598.1 | 315.8 | |
| 2015 | Phase II | 25.1 | 52.2 | 12.1 | 414.5 | 412.7 | 238.2 |
| Phase III | 16.3 | 75.5 | 141.5 | 225.2 | 255.5 | 188.9 | |
| Annual | 16.2 | 69.5 | 327.9 | 1304.7 | 1391.4 | 834.3 | |
| Phase I | 15.9 | 70.8 | 204.2 | 501.6 | 519.0 | 319.8 | |
| 2016 | Phase II | 25.8 | 51.8 | 10.5 | 389.7 | 276.8 | 241.5 |
| Phase III | 16.7 | 72.7 | 121.0 | 239.1 | 276.8 | 197.9 | |
| Annual | 16.1 | 72.1 | 475.3 | 1225.1 | 1340.1 | 860.6 | |
| Phase I | 18.2 | 62.6 | 76.4 | 579.2 | 597.1 | 351.1 | |
| 2017 | Phase II | 25.8 | 51.4 | 25.8 | 395.1 | 411.1 | 267.3 |
| Phase III | 16.7 | 63.3 | 51.8 | 251.2 | 299.6 | 189.1 | |
| Annual | 16.4 | 65.9 | 265.4 | 1330.5 | 1433.5 | 894.2 |
| Irrigation (mm) | (R + I)/ETc | |||||
|---|---|---|---|---|---|---|
| Year | Points | Phase I ¹ | Phase II 2 | Phase III 3 | TOTAL ⁴ | (%) |
| 1 | 89 | 119 | 44 | 252 | 47.08 | |
| 2 | ||||||
| 2015 | 3 | 86 | 118 | 44 | 248 | 46.60 |
| 4 | ||||||
| CR1 | 83 | 108 | 41 | 232 | 44.68 | |
| CR2 | 82 | 108 | 41 | 231 | 44.56 | |
| CR3 | 81 | 106 | 40 | 227 | 44.08 | |
| 1 | 64 | 154 | 51 | 300 | 60.72 | |
| 2 | 69 | 154 | 50 | 306 | 61.42 | |
| 2016 | 3 | 66 | 150 | 47 | 298 | 60.49 |
| 4 | 60 | 134 | 43 | 231 | 52.71 | |
| CR1 | 63 | 113 | 22 | 198 | 48.87 | |
| CR2 | 68 | 139 | 25 | 232 | 52.82 | |
| CR3 | 68 | 121 | 26 | 215 | 50.85 | |
| 1 | 148 | 109 | 174 | 431 | 60.85 | |
| 2 | 148 | 110 | 177 | 435 | 61.30 | |
| 2017 | 3 | 147 | 111 | 176 | 434 | 61.18 |
| 4 | 148 | 110 | 177 | 435 | 61.30 | |
| CR1 | 169 | 87 | 149 | 405 | 57.94 | |
| CR2 | 175 | 87 | 148 | 410 | 58.50 | |
| CR3 | 185 | 85 | 173 | 444 | 62.30 | |
| CR4 | 113 | 158 | 99 | 414 | 54.03 | |
| 2016 | 2017 | |||||
|---|---|---|---|---|---|---|
| Olive Grove | Position | Sensor | High Reference | Low Reference | High Reference | Low Reference |
| A at 0.30 m | S1 | 0.371 | 0.171 | 0.399 | 0.296 | |
| A at 0.60 m | S2 | 0.362 | 0.248 | 0.357 | 0.221 | |
| CR1 | A at 0.30 m | S3 | 0.325 | 0.150 | 0.356 | 0.252 |
| A at 0.60 m | S4 | 0.369 | 0.188 | 0.318 | 0.175 | |
| B at 0.30 m | S5 | 0.314 | 0.167 | 0.303 | 0.246 | |
| A at 0.30 m | S6 | 0.400 | 0.280 | 0.399 | 0.296 | |
| A at 0.60 m | S7 | 0.359 | 0.283 | 0.357 | 0.221 | |
| CR2 | A at 0.30 m | S8 | 0.385 | 0.165 | 0.356 | 0.252 |
| A at 0.60 m | S9 | 0.318 | 0.238 | 0.318 | 0.175 | |
| B at 0.30 m | S10 | 0.298 | 0.178 | 0.303 | 0.246 | |
| A at 0.30 m | S11 | 0.337 | 0.104 | 0.328 | 0.183 | |
| A at 0.60 m | S12 | 0.312 | 0.202 | 0.252 | 0.137 | |
| CR3 | A at 0.30 m | S13 | 0.447 | 0.219 | 0.365 | 0.283 |
| A at 0.60 m | S14 | 0.313 | 0.073 | 0.277 | 0.133 | |
| B at 0.30 m | S15 | 0.446 | 0.227 | 0.362 | 0.233 | |
| A at 0.30 m | S16 | 0.325 | 0.296 | |||
| A at 0.60 m | S17 | 0.356 | 0.221 | |||
| CR4 | A at 0.30 m | S18 | 0.331 | 0.252 | ||
| A at 0.60 m | S19 | 0.362 | 0.175 | |||
| B at 0.30 m | S20 | 0.301 | 0.246 |
| Control Points | 2015 | 2016 | 2017 | ||||
|---|---|---|---|---|---|---|---|
| T1 | 9105 ± 449 | ab | 12507 ± 759 | a | 15575 ± 625 | b | |
| T2 | 12146 ± 760 | a | 13284 ± 854 | a | 17809 ± 725 | b | |
| Yield | CR1 | 10240 ± 2037 | ab | 9732 ± 1362 | a | 18244 ± 726 | b |
| (kg/ha) | CR2 | 6740 ± 1324 | b | 5490 ± 1274 | b | 21478 ± 1324 | a |
| CR3 | 10788 ± 1453 | ab | 10937 ± 1687 | a | 18535 ± 2062 | ab | |
| CR4 | 15277 ± 683 | b | |||||
| Significance | * | * | * | ||||
| T1 | 2160 ± 131 | ab | 4454 ± 383 | a | 5208 ± 298 | b | |
| T2 | 3231 ± 297 | a | 4580 ± 510 | a | 6457 ± 230 | ab | |
| Number of fruits per tree | CR1 | 2625 ± 511 | ab | 2884 ± 302 | ab | 6714 ± 435 | a |
| CR2 | 1628 ± 285 | b | 1345 ± 388 | b | 7568 ± 548 | a | |
| CR3 | 2621 ± 486 | ab | 3966 ± 1202 | a | 6449 ± 958 | ab | |
| CR4 | 5089 ± 164 | b | |||||
| Significance | * | * | |||||
| T1 | 1725 ± 84 | ab | 2211 ± 104 | a | 3047 ± 61 | ||
| T2 | 2205 ± 140 | a | 2423 ± 174 | a | 3375 ± 171 | ||
| CR1 | 1362 ± 271 | bc | 1372 ± 201 | b | 3090 ± 148 | ||
| Oil yield | CR2 | 1024 ± 201 | c | 914 ± 230 | b | 3468 ± 141 | |
| (kg/ha) | CR3 | 1899 ± 256 | ab | 2071 ± 276 | a | 3508 ± 345 | |
| CR4 | 3033 ± 154 | ||||||
| Significance | * | * | n.s. | ||||
| T1 | 36 ± 1.78 | ab | 41 ± 2.50 | a | 36 ± 1.44 | c | |
| T2 | 49 ± 3.06 | a | 50 ± 3.22 | a | 41 ± 1.67 | bc | |
| CR1 | 44 ± 8.78 | ab | 49 ± 6.87 | a | 45 ± 1.79 | b | |
| WP yield | CR2 | 29 ± 5.73 | b | 23.66 ± 5.49 | b | 52 ± 3.22 | a |
| (kg/m3) | CR3 | 48 ± 6.40 | ab | 50.86 ± 7.85 | a | 42 ± 4.64 | bc |
| CR4 | 37 ± 1.65 | c | |||||
| Significance | * | * | * | ||||
| T1 | 7 ± 0.33 | ab | 7.29 ± 0.34 | ab | 7.03 ± 0.14 | b | |
| T2 | 8 ± 0.56 | a | 9.14 ± 0.65 | ab | 7.76 ± 0.39 | ab | |
| CR1 | 7 ± 1.43 | ab | 6.93 ± 1.01 | b | 7.63 ± 0.37 | ab | |
| WP oil yield | CR2 | 4 ± 0.87 | b | 3.94 ± 0.99 | c | 8.45 ± 0.34 | a |
| (kg/m3) | CR3 | 6 ± 1.20 | ab | 9.63 ± 1.28 | a | 7.90 ± 0.78 | ab |
| CR4 | 7.32 ± 0.37 | ab | |||||
| Significance | * | * | * |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Millán, S.; Campillo, C.; Casadesús, J.; Pérez-Rodríguez, J.M.; Prieto, M.H. Automatic Irrigation Scheduling on a Hedgerow Olive Orchard Using an Algorithm of Water Balance Readjusted with Soil Moisture Sensors. Sensors 2020, 20, 2526. https://doi.org/10.3390/s20092526
Millán S, Campillo C, Casadesús J, Pérez-Rodríguez JM, Prieto MH. Automatic Irrigation Scheduling on a Hedgerow Olive Orchard Using an Algorithm of Water Balance Readjusted with Soil Moisture Sensors. Sensors. 2020; 20(9):2526. https://doi.org/10.3390/s20092526
Chicago/Turabian StyleMillán, Sandra, Carlos Campillo, Jaume Casadesús, Juan Manuel Pérez-Rodríguez, and Maria Henar Prieto. 2020. "Automatic Irrigation Scheduling on a Hedgerow Olive Orchard Using an Algorithm of Water Balance Readjusted with Soil Moisture Sensors" Sensors 20, no. 9: 2526. https://doi.org/10.3390/s20092526
APA StyleMillán, S., Campillo, C., Casadesús, J., Pérez-Rodríguez, J. M., & Prieto, M. H. (2020). Automatic Irrigation Scheduling on a Hedgerow Olive Orchard Using an Algorithm of Water Balance Readjusted with Soil Moisture Sensors. Sensors, 20(9), 2526. https://doi.org/10.3390/s20092526