Application of Radio Environment Map Reconstruction Techniques to Platoon-based Cellular V2X Communications





Abstract
1. Introduction
- a scheme to reduce the control information exchanged for REM reconstruction in platooning based on OK is proposed. The REM reconstruction capability is evaluated via the mean square error and traded-off versus signaling overhead;
- a suitable semivariogram modeling for OK interpolation in the scenarios under consideration is proposed;
- an analysis of the optimal patterns of vehicles’ positions for reliable REM reconstruction is performed;
- expressions for the communication cost related to the REM reconstruction are derived for a centralized and a distributed architecture.
2. System Model
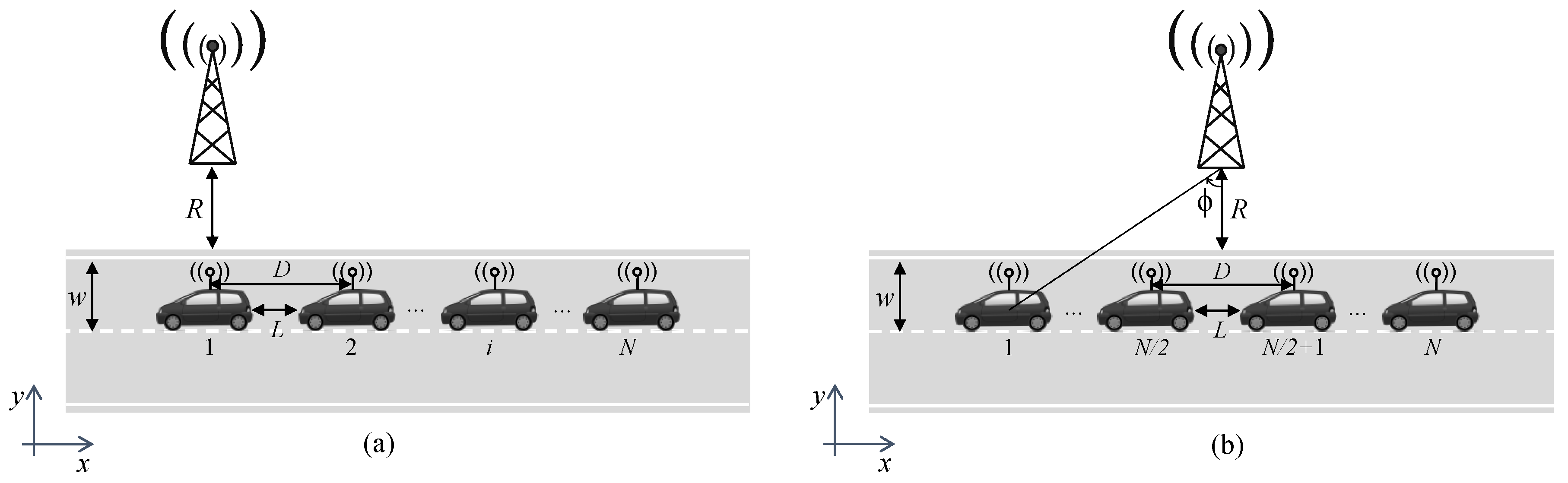
2.1. Use Case and Scenario
2.2. REM Reconstruction with OK
2.3. Centralized vs. Distributed Architecture
2.3.1. Centralized Architecture
2.3.2. Distributed Architecture
3. Semivariogram Modeling
3.1. Semivariogram Models
3.2. Model Selection
4. Performance Evaluation
4.1. Vehicle Selection
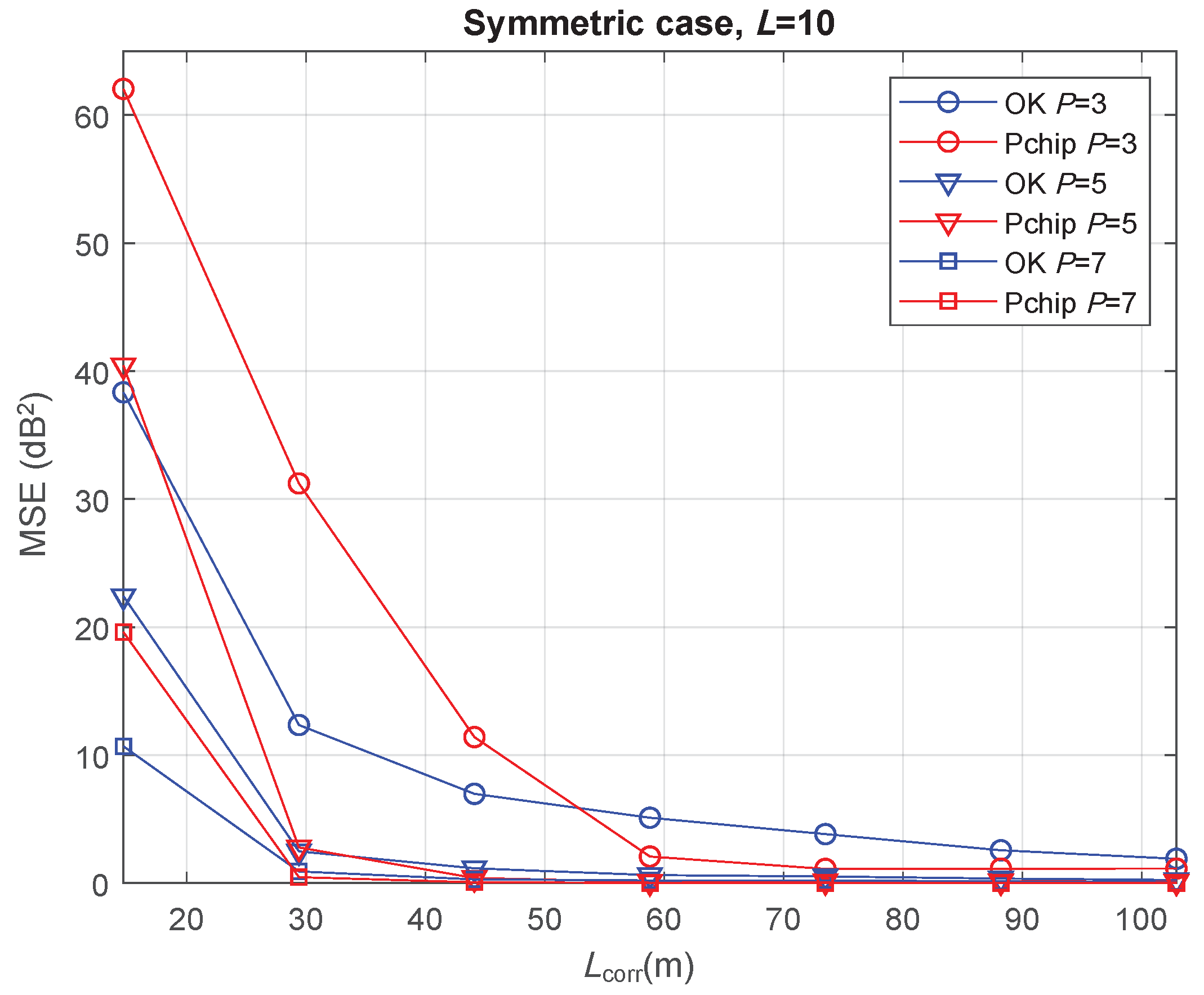
4.2. REM Reconstruction Accuracy
4.3. Communication Cost
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Study on Enhancement of 3GPP Support for 5G V2X Services. Available online: https://itectec.com/archive/3gpp-specification-tr-22-886/ (accessed on 24 April 2020).
- Nardini, G.; Virdis, A.; Campolo, C.; Stea, A.M.G. Cellular-V2X Communications for Platooning: Design and Evaluation. Sensors 2018, 18, 1527. [Google Scholar] [CrossRef] [PubMed]
- Roger, S.; Martín-Sacristán, D.; Garcia-Roger, D.; Monserrat, J.F.; Spapis, P.; Kousaridas, A.; Ayaz, S.; Kaloxylos, A. Low-Latency Layer-2-Based Multicast Scheme for Localized V2X Communications. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2962–2975. [Google Scholar] [CrossRef]
- Martín-Sacristán, D.; Roger, S.; Garcia-Roger, D.; Monserrat, J.F.; Kousaridas, A.; Spapis, P.; Ayaz, S.; Zhou, C. Evaluation of LTE-Advanced Connectivity Options for the Provisioning of V2X Services. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018. [Google Scholar]
- Marsch, P.; Bulakci, O.; Queseth, O.; Boldi, M. 5G System Design: Architectural and Functional Considerations and Long Term Research; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Amoozadeh, M.; Deng, H.; Chuah, C.N.; Zhang, H.M.; Ghosal, D. Platoon management with cooperative adaptive cruise control enabled by VANET. Veh. Commun. 2015, 2, 110–123. [Google Scholar] [CrossRef]
- Martín-Sacristán, D.; Roger, S.; Garcia-Roger, D.; Monserrat, J.F.; Kousaridas, A.; Spapis, P.; Zhou, C. Signaling Reduction in 5G eV2X Communications Based on Vehicle Grouping. In Proceedings of the 2019 European Conference on Networks and Communications (EuCNC), Valencia, Spain, 18–21 June 2019; pp. 427–431. [Google Scholar] [CrossRef]
- Tang, X.; Xu, X.; Svensson, T.; Tao, X. Coverage Performance of Joint Transmission for Moving Relay Enabled Cellular Networks in Dense Urban Scenarios. IEEE Access 2017, 5, 13001–13009. [Google Scholar] [CrossRef]
- Fodor, G.; Roger, S.; Rajatheva, N.; Slimane, S.B.; Svensson, T.; Popovski, P.; Da Silva, J.M.B.; Ali, S. An Overview of Device-to-Device Communications Technology Components in METIS. IEEE Access 2016, 4, 3288–3299. [Google Scholar] [CrossRef]
- Chowdappa, V.; Botella, C.; Samper-Zapater, J.J.; Martinez, R.J. Distributed Radio Map Reconstruction for 5G Automotive. IEEE Intell. Transp. Syst. Mag. 2018, 10, 36–49. [Google Scholar] [CrossRef]
- Yilmaz, H.B.; Tugcu, T.; Alagöz, F.; Bayhan, S. Radio Environment Map as Enabler for Practical Cognitive Radio Networks. IEEE Commun. Mag. 2013, 51, 162–169. [Google Scholar] [CrossRef]
- Kryszkiewicz, P.; Kliks, A.; Kułacz, L.; Bogucka, H.; Koudouridis, G.P.; Dryjański, M. Context-Based Spectrum Sharing in 5G Wireless Networks Based on Radio Environment Maps. Wirel. Commun. Mob. Comput. 2018, 2018, 3217315. [Google Scholar] [CrossRef]
- Perez-Romero, J.; Zalonis, A.; Boukhatem, L.; Kliks, A.; Koutlia, K.; Dimitriou, N.; Kurda, R. On the Use of Radio Environment Maps for Interference Management in Heterogeneous Networks. IEEE Commun. Mag. 2015, 53, 184–191. [Google Scholar] [CrossRef]
- Braham, H.; Jemaa, S.B.; Fort, G.; Moulines, E.; Sayrac, B. Spatial Prediction Under Location Uncertainty in Cellular Networks. IEEE Trans. Wirel. Commun. 2016, 15, 7633–7643. [Google Scholar] [CrossRef]
- Barman, N.; Valentin, S.; Martini, M.G. Predicting Link Quality of Wireless Channel of Vehicular Users Using Street and Coverage Maps. In Proceedings of the IEEE 27th International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016. [Google Scholar]
- Sybis, M.; Kryszkiewicz, P.; Sroka, P. On the Context-Aware, Dynamic Spectrum Access for Robust Intraplatoon Communications. Mob. Inf. Syst. 2018, 2018, 1–16. [Google Scholar] [CrossRef]
- Dwarakanath, R.C.; Naranjo, J.D.; Ravanshid, A. Modeling of Interference Maps for Licensed Shared Access in LTE-advanced Networks Supporting Carrier Aggregation. In Proceedings of the 2013 IFIP Wireless Days (WD), Valencia, Spain, 13–15 November 2013; pp. 1–5. [Google Scholar]
- Yilmaz, H.; Tugcu, T. Location Estimation-based Radio Environment Map Construction in Fading Channels. Wirel. Commun. Mob. Comput. 2015, 15, 561–570. [Google Scholar] [CrossRef]
- Üreten, S.; Yongaçoğlu, A.; Petriu, E. A Comparison of Interference Cartography Generation Techniques in Cognitive Radio Networks. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 1879–1883. [Google Scholar]
- Taranto, R.D.; Muppirisetty, S.; Raulefs, R.; Slock, D.; Svensson, T.; Wymeersch, H. Location-aware Communications for 5G Networks: How Location Information Can Improve Scalability, Latency, and Robustness of 5G. IEEE Signal Process. Mag. 2014, 31, 102–112. [Google Scholar] [CrossRef]
- Chowdappa, V.P.; Fröhle, M.; Wymeersch, H.; Botella, C. Distributed Channel Prediction for Multi-agent Systems. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Han, Z.; Liao, J.; Qi, Q.; Sun, H.; Wang, J. Radio Environment Map Construction by kriging Algorithm Based on Mobile Crowd Sensing. Wirel. Commun. Mob. Comput. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Dall’Anese, E.; Kim, S.J.; Giannakis, G. Channel Gain Map Tracking via Distributed Kriging. IEEE Trans. Veh. Technol. 2011, 60, 1205–1211. [Google Scholar] [CrossRef]
- Sato, K.; Fujii, T. Kriging-Based Interference Power Constraint: Integrated Design of the Radio Environment Map and Transmission Power. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 13–25. [Google Scholar] [CrossRef]
- Babak, O.; Deutsch, C. Statistical Approach to Inverse Distance Interpolation. Stoch. Environ. Res. Risk Assess. 2009, 23, 543–553. [Google Scholar] [CrossRef]
- Chowdappa, V.; Botella, C.; Beferull-Lozano, B. Distributed Clustering Algorithm for Spatial Field Reconstruction in Wireless Sensor Networks. In Proceedings of the 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Study on LTE-Based V2X Services. Available online: https://www.tech-invite.com/3m36/tinv-3gpp-36-885.html (accessed on 24 April 2020).
- Schabenberger, O.; Gotway, C.A. Statistical Methods for Spatial Data Analysis; Chapman & Hall/CRC: Boca Raton, FL, USA, 2004. [Google Scholar]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Gudmunson, M. Correlation Model for Shadow Fading in Mobile Radio Systems. Electron. Lett. 1991, 27, 2145–2146. [Google Scholar] [CrossRef]
- Katagiri, K.; Sato, K.; Fujii, T. Crowdsourcing-Assisted Radio Environment Database for V2V Communication. Sensors 2018, 18, 1183. [Google Scholar] [CrossRef]
- Huang, Y.; Hua, Y. Energy Planning for Progressive Estimation in Multihop Sensor Networks. IEEE Trans. Signal Process. 2009, 57, 4052–4065. [Google Scholar] [CrossRef]
- Shah, S.; Beferull-Lozano, B. Joint Sensor Selection and Multihop Routing for Distributed Estimation in Ad-hoc Wireless Sensor Networks. IEEE Trans. Signal Process. 2013, 61, 6355–6370. [Google Scholar] [CrossRef]
- Frantzis, F.; Chowdappa, V.; Botella, C.; Samper, J.J.; Martinez, R.J. Radio Environment Map Estimation Based on Communication Cost Modeling for Heterogeneous Networks. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, NSW, Australia, 4–7 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Roger, S.; Botella, C.; Meza-Sánchez, E.E.; Pérez-Solano, J.J. Communication Cost of Channel Estimation Interpolation for Group-based Vehicular Communications in Cellular Networks. In Proceedings of the 10th Euro American Conference on Telematics and Information Systems (EATIS), Aveiro, Portugal, 25–27 November 2020. [Google Scholar]
- Jian, X.; Olea, R.; Yu, Y.S. Semivariogram Modeling by Weighted Least Squares. Comput. Geosci. 1996, 22, 387–397. [Google Scholar] [CrossRef]
- Boccolini, G.; Hernández-Peñaloza, G.; Beferull-Lozano, B. Wireless Sensor Network for Spectrum Cartography Based on Kriging Interpolation. In Proceedings of the IEEE 23rd International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Sydney, NSW, Australia, 9–12 September 2012. [Google Scholar]
- Cressie, N.A.C. Statistics for Spatial Data; John Wiley & Sons: Hoboken, NJ, USA, 1993. [Google Scholar]
- Akaike, H. A New Look at the Statistical Model Identification. IEEE Trans. Autom. Control 1974, 19, 716–723. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spherical | Exponential | Gaussian | ||||
|---|---|---|---|---|---|---|
| MSE | AIC | MSE | AIC | MSE | AIC | |
| 2.59 | 5.56 | 4.15 | 6.97 | 4.09 | 6.93 | |
| 2.43 | 4.01 | 4.22 | 6.21 | 3.93 | 5.93 | |
| 2.08 | 1.61 | 3.64 | 4.41 | 3.31 | 3.94 | |
| 1.47 | −2.44 | 2.94 | 1.72 | 2.59 | 0.96 | |
| 0.90 | −8.36 | 2.23 | −2.00 | 1.95 | −2.95 | |
| 0.54 | −15.57 | 1.76 | −6.11 | 1.43 | −7.77 | |
| 0.31 | −24.32 | 1.46 | −10.37 | 1.14 | −12.60 | |
| MSE | AIC | MSE | AIC | MSE | AIC | |
| 122.49 | 17.13 | 248.56 | 19.25 | 226.98 | 18.98 | |
| 127.76 | 19.86 | 260.69 | 22.71 | 230.58 | 22.22 | |
| 115.53 | 21.70 | 229.26 | 25.13 | 205.41 | 24.58 | |
| 87.75 | 22.10 | 194.89 | 26.88 | 174.08 | 26.21 | |
| 60.08 | 21.05 | 158.15 | 27.82 | 138.80 | 26.91 | |
| 42.53 | 19.37 | 133.84 | 28.54 | 111.24 | 27.06 | |
| 32.35 | 17.51 | 118.10 | 29.17 | 94.52 | 27.16 | |
| Spherical | Exponential | Gaussian | ||||
|---|---|---|---|---|---|---|
| MSE | AIC | MSE | AIC | MSE | AIC | |
| 18.07 | 11.37 | 14.82 | 10.79 | 4.98 | 7.52 | |
| 20.00 | 12.44 | 17.79 | 11.97 | 5.08 | 6.96 | |
| 19.83 | 12.89 | 18.06 | 12.42 | 4.92 | 5.92 | |
| 19.10 | 12.95 | 17.69 | 12.49 | 3.90 | 3.42 | |
| 18.10 | 12.65 | 16.67 | 12.07 | 2.64 | −0.83 | |
| 17.29 | 12.17 | 15.79 | 11.44 | 1.58 | −6.98 | |
| 16.18 | 11.28 | 15.71 | 11.01 | 0.80 | −15.78 | |
| MSE | AIC | MSE | AIC | MSE | AIC | |
| 278.89 | 19.60 | 228.51 | 19.00 | 41.83 | 13.91 | |
| 292.43 | 23.17 | 261.93 | 22.73 | 35.65 | 14.75 | |
| 296.11 | 26.41 | 269.92 | 25.94 | 31.15 | 15.15 | |
| 293.34 | 29.34 | 272.68 | 28.90 | 22.70 | 13.98 | |
| 291.02 | 32.10 | 275.34 | 31.70 | 14.57 | 11.13 | |
| 285.06 | 34.59 | 268.62 | 34.11 | 9.38 | 7.27 | |
| 284.00 | 37.10 | 269.47 | 36.59 | 6.37 | 2.89 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roger, S.; Botella, C.; Pérez-Solano, J.J.; Perez, J. Application of Radio Environment Map Reconstruction Techniques to Platoon-based Cellular V2X Communications. Sensors 2020, 20, 2440. https://doi.org/10.3390/s20092440
Roger S, Botella C, Pérez-Solano JJ, Perez J. Application of Radio Environment Map Reconstruction Techniques to Platoon-based Cellular V2X Communications. Sensors. 2020; 20(9):2440. https://doi.org/10.3390/s20092440
Chicago/Turabian StyleRoger, Sandra, Carmen Botella, Juan J. Pérez-Solano, and Joaquin Perez. 2020. "Application of Radio Environment Map Reconstruction Techniques to Platoon-based Cellular V2X Communications" Sensors 20, no. 9: 2440. https://doi.org/10.3390/s20092440
APA StyleRoger, S., Botella, C., Pérez-Solano, J. J., & Perez, J. (2020). Application of Radio Environment Map Reconstruction Techniques to Platoon-based Cellular V2X Communications. Sensors, 20(9), 2440. https://doi.org/10.3390/s20092440