Assessment of Centre National d’Études Spatiales Real-Time Ionosphere Maps in Instantaneous Precise Real-Time Kinematic Positioning over Medium and Long Baselines

 , , , , , , and
, , , , , , and
Abstract
:1. Introduction
2. Materials and Methods
- User receiver coordinates;
- Double-differenced (DD) ionospheric delays;
- Zenith tropospheric delays;
- Double-differenced (DD) integer ambiguities.
3. Results
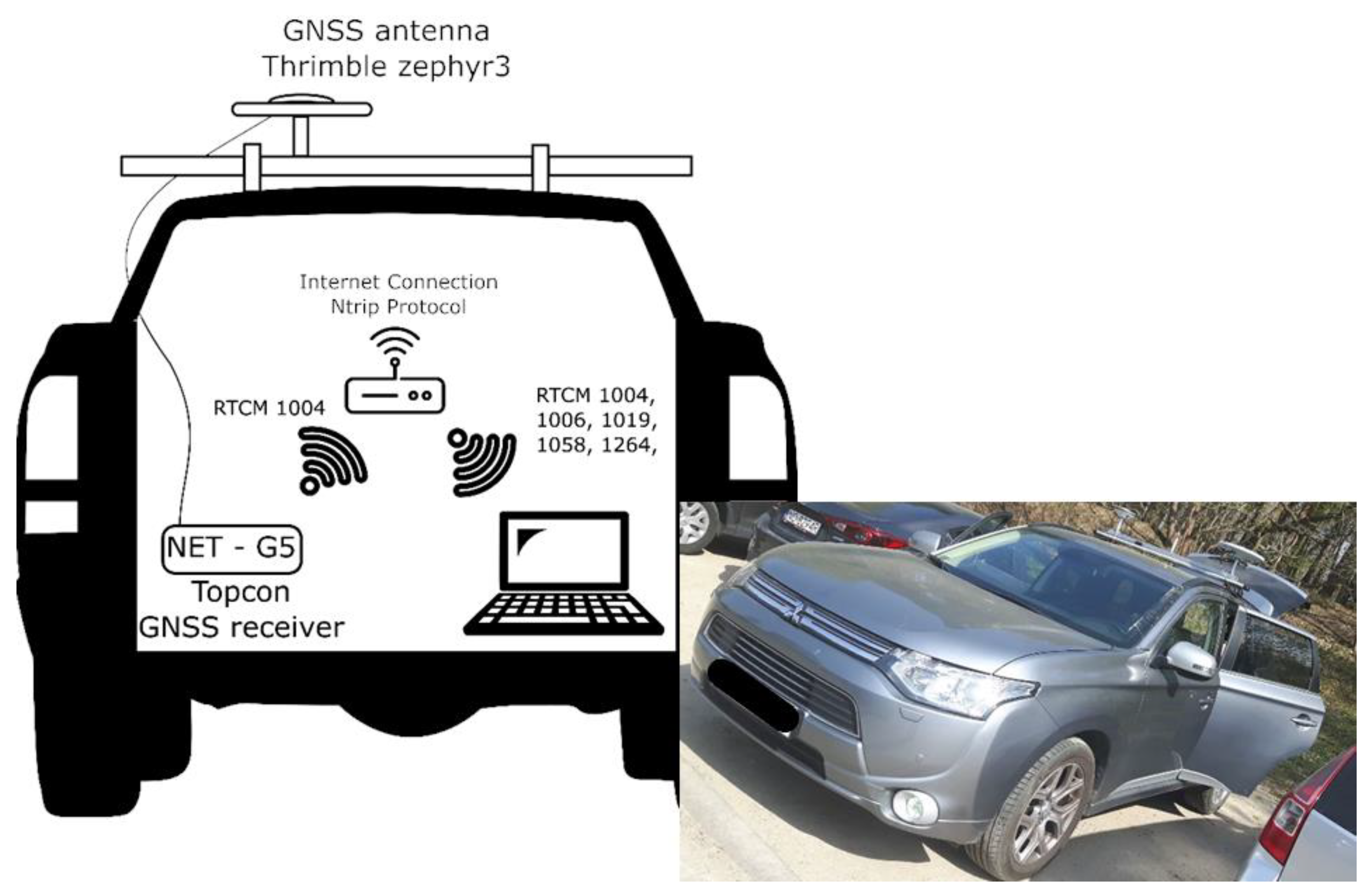
3.1. Experiment Description
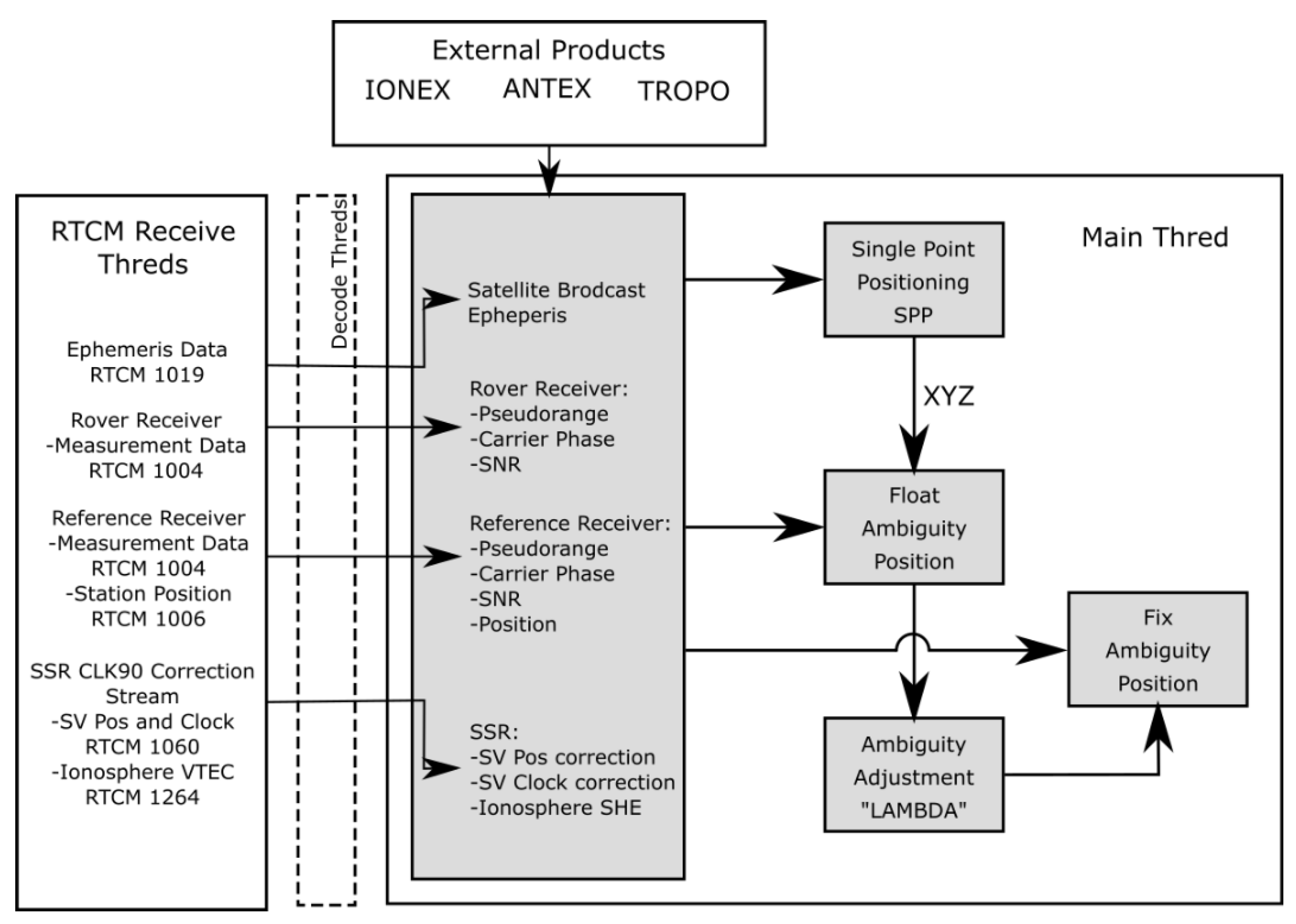
- Real-time instantaneous RTK positioning based on RTCM streams using the pyGNSS software;
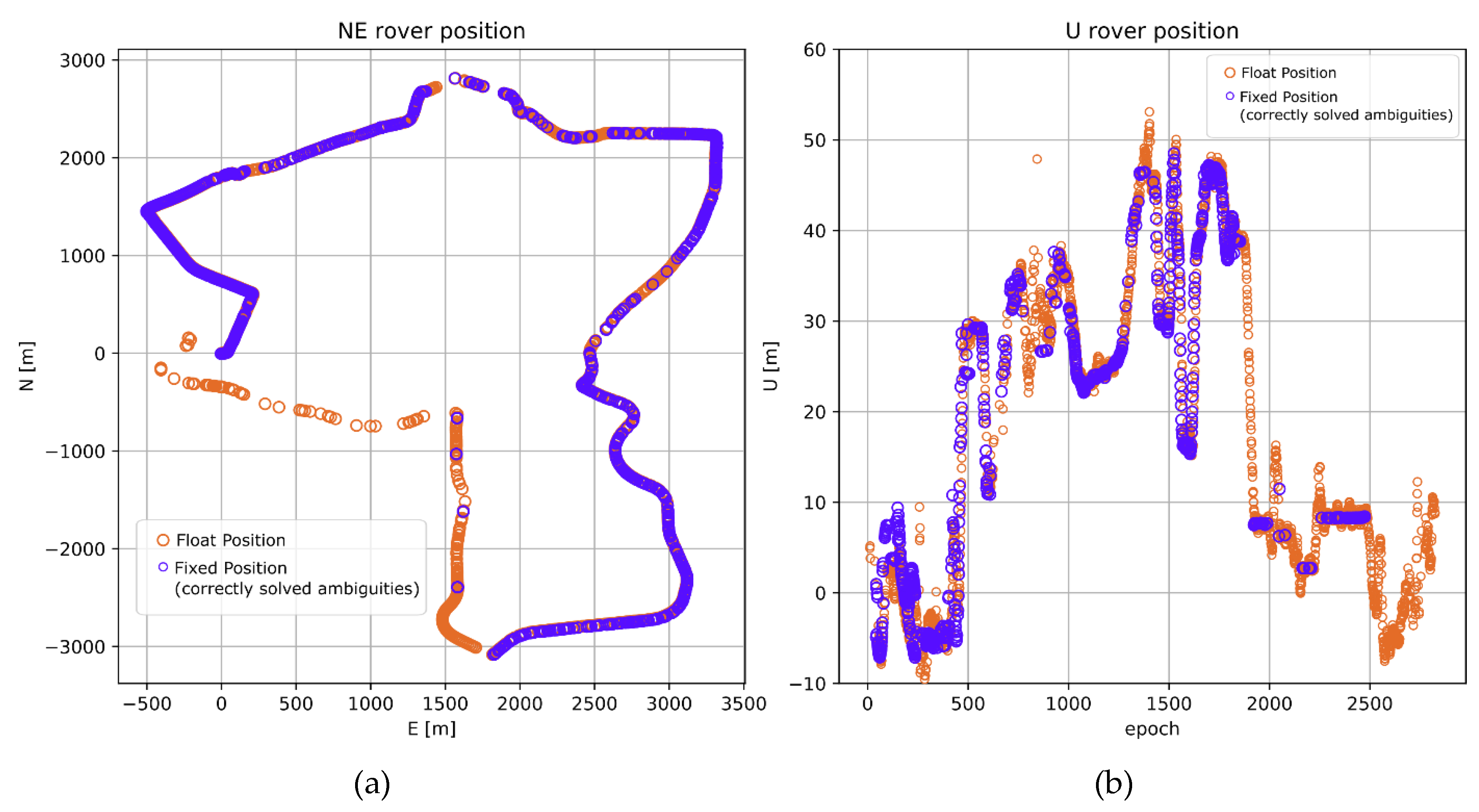
3.2. PyGNSS Kinematic Real-Time Data Processing
- short baseline to KRO1 (1 to 6 km) that served as a reference solution;
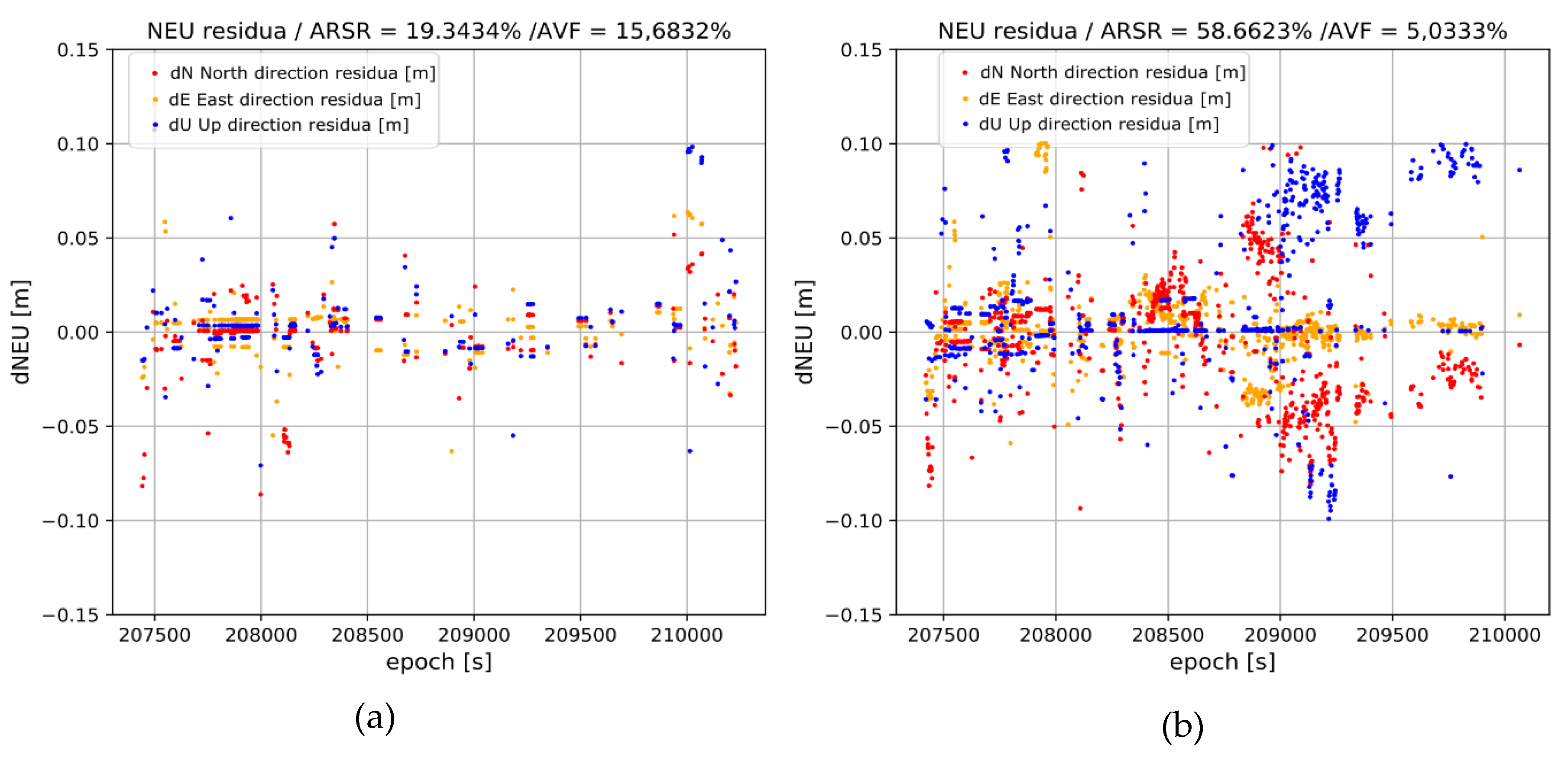
- ~81.7 km baseline to the BROD reference station, without SSR ionospheric corrections;
- ~81.7 km baseline to the BROD reference station, with SSR ionospheric corrections (from 1264 RTCM message).
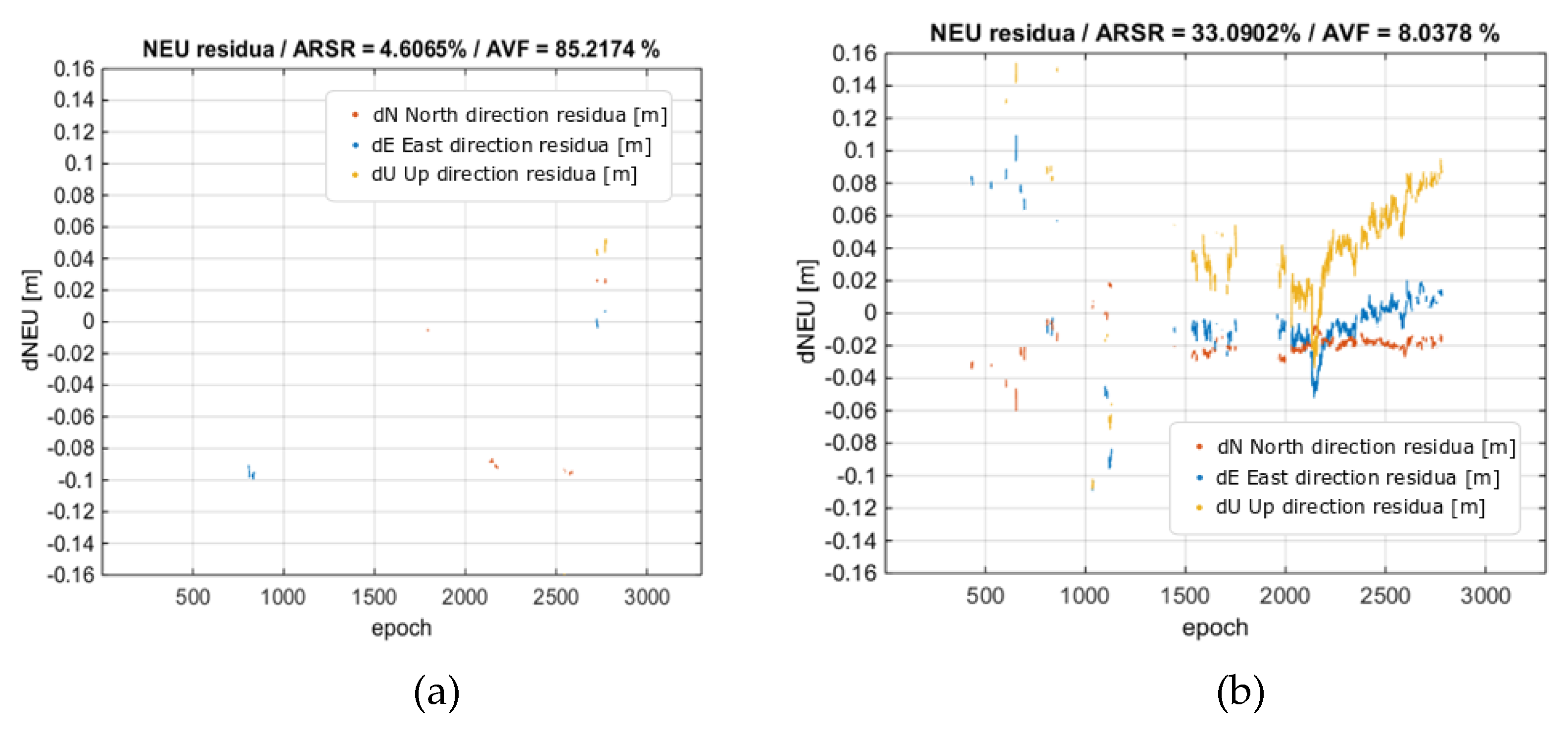
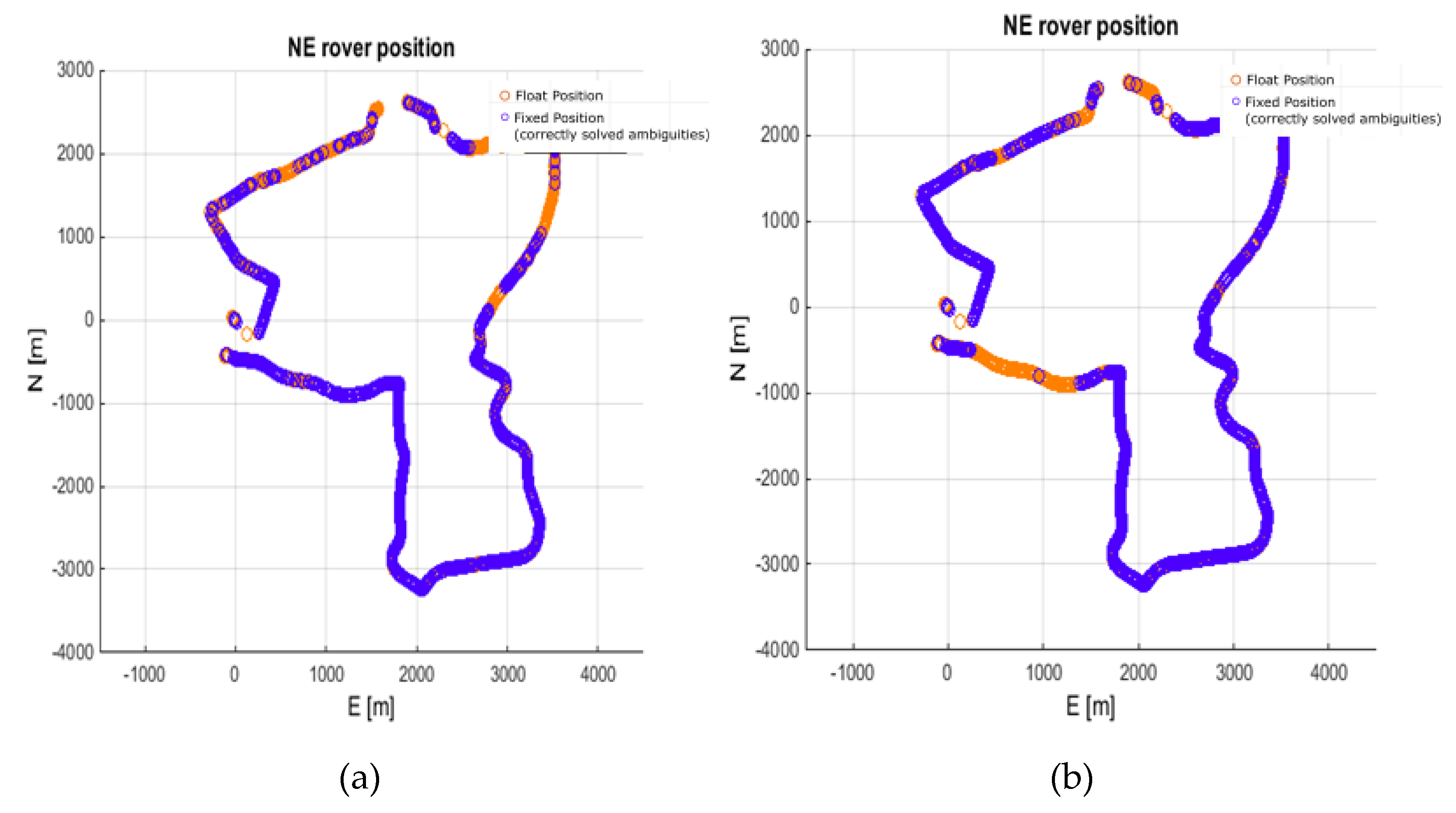
3.3. GINPOS: Kinematic Data Processed in Postprocessing
- A short baseline (1 to 6 km) that served as a reference solution;
- a 62 km baseline to the DZIA reference station, with and without ionospheric corrections;
- an 81.7 km baseline to the BROD reference station, with and without ionospheric corrections;
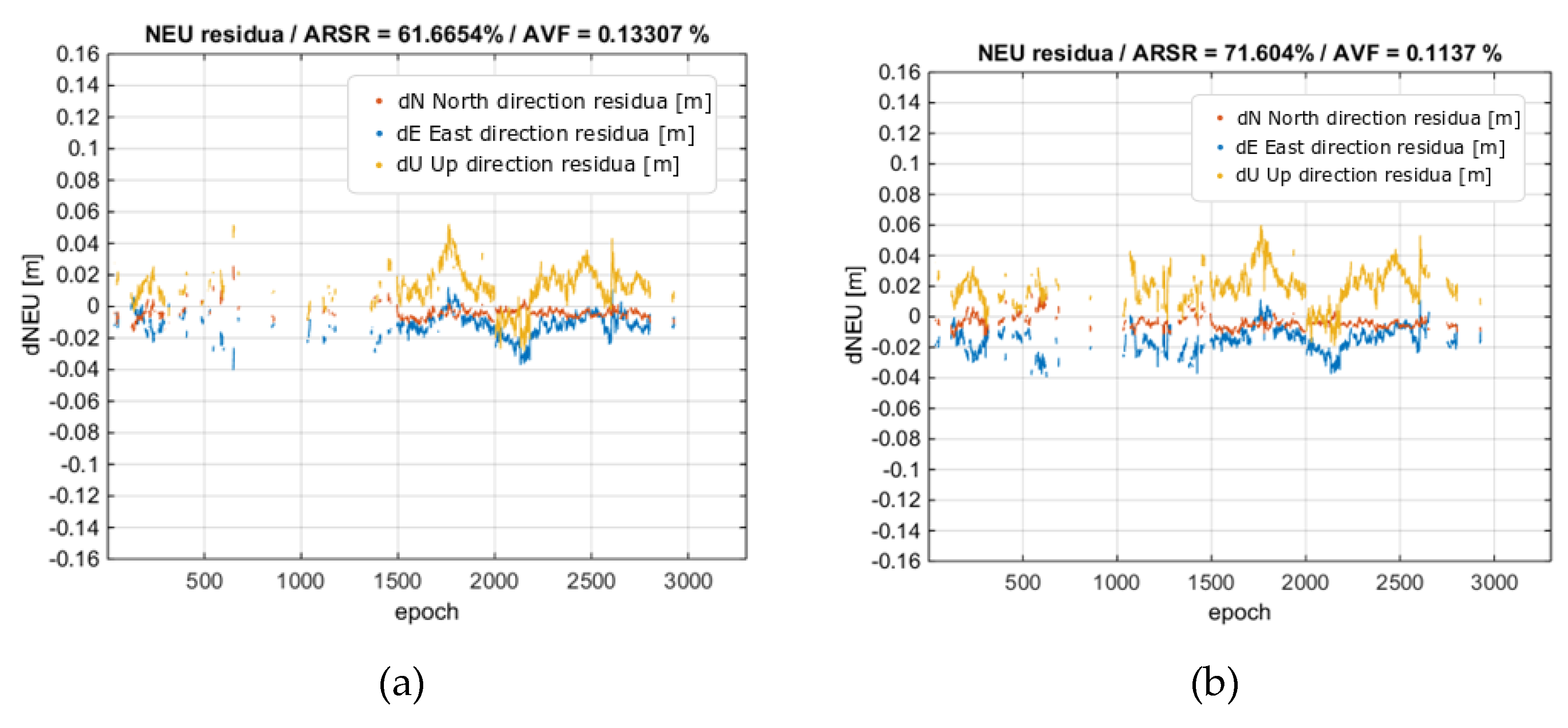
- multi-baseline (61, 62, and 81.7 km to MRAG, DZIA, and BROD), with and without ionospheric corrections.
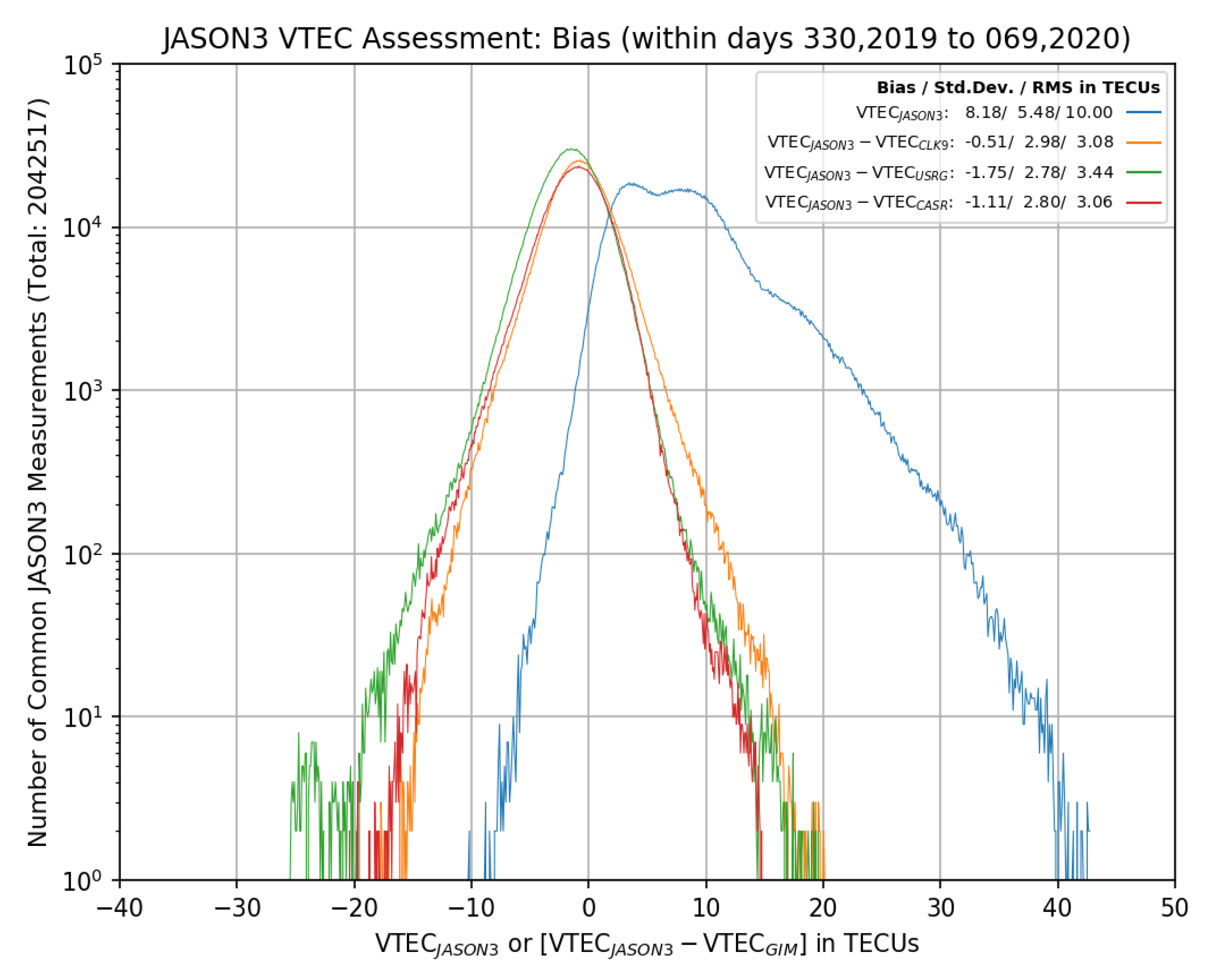
4. Potential Improvements under IGS Experimental RT-GIMs
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Langley, R.B. Rtk gps. Gps World 1998, 9, 70–76. [Google Scholar]
- Rizos, C.; Han, S. Reference station network based RTK systems-concepts and progress. Wuhan Univ. J. Nat. Sci. 2003, 8, 566–574. [Google Scholar] [CrossRef]
- Hu, G.; Khoo, H.; Goh, P.; Law, C. Development and assessment of GPS virtual reference stations for RTK positioning. J. Geod. 2003, 77, 292–302. [Google Scholar] [CrossRef]
- Hu, G.R.; Khoo, V.H.S.; Goh, P.C.; Law, C.L. Internet-based GPS VRS RTK positioning with a multiple reference station network. Positioning 2009, 1, 114–120. [Google Scholar] [CrossRef] [Green Version]
- Vollath, U.; Landau, H.; Chen, X.; Doucet, K.; Pagels, C. Network RTK versus single base RTK–understanding the error characteristics. In Proceedings of the 15th International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 24–27 September 2002; pp. 24–27. [Google Scholar]
- Vollath, U.; Deking, A.; Landau, H.; Pagels, C. Long-range RTK positioning using virtual reference stations. In Proceedings of the International Symposium on Kinematics Systems in Geodesy, Geomatics and Navication, Banff, AB, Canada, 5–8 June 2001. [Google Scholar]
- Kim, D.; Langley, R.B. Long-range single-baseline RTK for complementing network-based RTK. Proc. ION GNSS 2007, 639–650. [Google Scholar]
- Dai, L.; Eslinger, D.; Sharpe, T. Innovative algorithms to improve long range RTK reliability and availability. In Proceedings of the ION NTM, San Diego, CA, USA, 22–24 January 2007; pp. 860–872. [Google Scholar]
- Odijk, D. Weighting ionospheric corrections to improve fast GPS positioning over medium distances. In Proceedings of the ION GPS, Salt Lake City, UT, USA, 19–22 September 2000; pp. 1113–1123. [Google Scholar]
- Liu, G.C.; Lachapelle, G. Ionosphere weighted GPS cycle ambiguity resolution. In Proceedings of the Proceedings of ION NTM, San Diego, CA, USA, 28–30 January 2002; pp. 889–899. [Google Scholar]
- Wielgosz, P.; Kashani, I.; Grejner-Brzezinska, D. Analysis of long-range network RTK during a severe ionospheric storm. J. Geod. 2005, 79, 524–531. [Google Scholar] [CrossRef]
- Martín, A.; Anquela, A.; Dimas-Pagés, A.; Cos-Gayón, F. Validation of performance of real-time kinematic PPP. A possible tool for deformation monitoring. Measurement 2015, 69, 95–108. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Zhang, W.; Li, Y. A new method for real-time PPP correction updates. In Proceedings of the International Symposium on Earth and Environmental Sciences for Future Generations, Prague, Czech Republic, 22 June–2 July 2016; pp. 223–228. [Google Scholar]
- Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of multiple GNSS real-time SSR products from different analysis centers. ISPRS Int. J. Geo-Inf. 2018, 7, 85. [Google Scholar] [CrossRef] [Green Version]
- Ren, X.; Chen, J.; Li, X.; Zhang, X.; Freeshah, M. Performance evaluation of real-time global ionospheric maps provided by different IGS analysis centers. GPS Solut. 2019, 23, 113. [Google Scholar] [CrossRef]
- Ghoddousi-Fard, R.; Lahaye, F. Evaluation of single frequency GPS precise point positioning assisted with external ionosphere sources. Adv. Space Res. 2016, 57, 2154–2166. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.A.; Wielgosz, P.; Kashani, I.; Smith, D.A.; Robertson, D.S.; Mader, G.L.; Komjathy, A. The impact of severe ionospheric conditions on the accuracy of kinematic position estimation: Performance analysis of various ionosphere modeling techniques. Navigation 2006, 53, 203–217. [Google Scholar] [CrossRef]
- Wielgosz, P. Quality assessment of GPS rapid static positioning with weighted ionospheric parameters in generalized least squares. Gps Solut. 2011, 15, 89–99. [Google Scholar] [CrossRef]
- Teunissen, P. The ionosphere-weighted GPS baseline precision in canonical form. J. Geod. 1998, 72, 107–111. [Google Scholar] [CrossRef]
- Nie, Z.; Yang, H.; Zhou, P.; Gao, Y.; Wang, Z. Quality assessment of CNES real-time ionospheric products. Gps Solut. 2019, 23, 11. [Google Scholar] [CrossRef]
- Rülke, A.; Agrotis, L.; Enderle, W.; MacLeod, K. IGS real time service–status, future tasks and limitations. In Proceedings of the IGS Workshop; Federal Agency for Cartography and Geodesy: Frankfurt, Germany, 2016. [Google Scholar]
- Wielgosz, P.; Paziewski, J.; Krankowski, A.; Kroszczyński, K.; Figurski, M. Results of the application of tropospheric corrections from different troposphere models for precise GPS rapid static positioning. Acta Geophys. 2012, 60, 1236–1257. [Google Scholar] [CrossRef]
- Paziewski, J.; Stepniak, K.; Wielgosz, P.; Krypiak-Gregorczyk, A.; Krukowska, M. Multi-GNSS precise single-epoch positioning. Proc. EGU General Assem. Conf. Abstr. 2012, 14, 3561. [Google Scholar]
- Hernández-Pajares, M.; Roma-Dollase, D.; Krankowski, A.; García-Rigo, A.; Orús-Pérez, R. Methodology and consistency of slant and vertical assessments for ionospheric electron content models. J. Geod. 2017, 91, 1405–1414. [Google Scholar] [CrossRef]
- Roma-Dollase, D.; Hernández-Pajares, M.; Krankowski, A.; Kotulak, K.; Ghoddousi-Fard, R.; Yuan, Y.; Li, Z.; Zhang, H.; Shi, C.; Wang, C.; et al. Consistency of seven different GNSS global ionospheric mapping techniques during one solar cycle. J. Geod. 2018, 92, 691–706. [Google Scholar] [CrossRef] [Green Version]
- Paziewski, J.; Wielgosz, P. Assessment of GPS+ Galileo and multi-frequency Galileo single-epoch precise positioning with network corrections. GPS Solut. 2014, 18, 571–579. [Google Scholar] [CrossRef] [Green Version]
- Leandro, R.; Santos, M.; Langley, R.B. UNB neutral atmosphere models: Development and performance. In Proceedings of the ION NTM, Fort Worth, TX, USA, 26–29 September 2006; Volume 52, pp. 564–573. [Google Scholar]
- Leandro, R.F.; Langley, R.B.; Santos, M.C. UNB3m_pack: A neutral atmosphere delay package for radiometric space techniques. GPS Solut. 2008, 12, 65–70. [Google Scholar] [CrossRef]
- Farah, A. Assessment of UNB3M neutral atmosphere model and EGNOS model for near-equatorial-tropospheric delay correction. J. Geomat 2011, 5, 67–72. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS–Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer Science & Business Media: Wien, Austria, 2007. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer Science & Business Media: Wien, Austria, 2012. [Google Scholar]
- Teunissen, P.J. Least-squares estimation of the integer GPS ambiguities. In Proceedings of the Invited Lecture, Section IV Theory and Methodology, IAG General Meeting, Beijing, China, 8 September 1993. [Google Scholar]
- Committee, R.S. Proposal of new RTCM SSR Messages, SSR Stage 2: Vertical TEC (VTEC) for RTCM Standard 10403.2 Differential GNSS (Global Navigation Satellite Systems) Services-Version 3; RTCM Special Committee; Radio Technical Commission for Maritime Services: Arlington, MA, USA, 2016. [Google Scholar]
- Bosy, J.; Graszka, W.; Leończyk, M. ASG-EUPOS-a multifunctional precise satellite positioning system in Poland. TransNav. Int. J. Mar. Navig. Saf. Sea Transp. 2007, 1. [Google Scholar]
- Bosy, J.; Oruba, A.; Graszka, W.; Leończyk, M.; Ryczywolski, M. ASG-EUPOS densification of EUREF Permanent Network on the territory of Poland. Rep. Geod. 2008, 105–111. [Google Scholar]
- Yongqi, C. An Approach to Validate the Resolved Ambiguities in GPS Rapid Positioning. J. Wuhan Tech. Univ. Surv. Mapp. (Wtusm) 1997, 22, 342–345. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006; pp. 466–490. [Google Scholar]
- Teunissen, P.J.; Verhagen, S. The GNSS ambiguity ratio-test revisited: A better way of using it. Surv. Rev. 2009, 41, 138–151. [Google Scholar] [CrossRef]
- Paziewski, J. Study on desirable ionospheric corrections accuracy for network-RTK positioning and its impact on time-to-fix and probability of successful single-epoch ambiguity resolution. Adv. Space Res. 2016, 57, 1098–1111. [Google Scholar] [CrossRef]
- Paziewski, J. New algorithms for precise positioning with use of Galileo and EGNOS European satellite navigation systems. Ph.D. Thesis, University of Warmia and Mazury, Olsztyn, Poland, 2012. [Google Scholar]
- Paziewski, J. Precise GNSS single epoch positioning with multiple receiver configuration for medium-length baselines: Methodology and performance analysis. Meas. Sci. Technol. 2015, 26, 035002. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Roma-Dollase, D.; Garcia-Fernàndez, M.; Orus-Perez, R.; García-Rigo, A. Precise ionospheric electron content monitoring from single-frequency GPS receivers. GPS Solut. 2018, 22, 102. [Google Scholar] [CrossRef] [Green Version]
- Wang, J. Stochastic assessment of GPS measurements for precise positioning. In Proceedings of the 11th Meeting of the Satellite Division of the US Inst. of Navigation, Nashville, TN, USA, 15–18 September 1998. [Google Scholar]
- Schwarz, C.R.; Snay, R.A.; Soler, T. Accuracy assessment of the National Geodetic Survey’s OPUS-RS utility. GPS Solut. 2009, 13, 119–132. [Google Scholar] [CrossRef]
- Wielgosz, P.; Grejner-Brzezińska, D.; Kashani, I. Network approach to precise GPS navigation. Navigation 2004, 51, 213–220. [Google Scholar] [CrossRef]
- Xi, J.; Kong, Q.; Wang, X. Spatial polarization of villages in tourist destinations: A case study from Yesanpo, China. J. Mt. Sci. 2015, 12, 1038–1050. [Google Scholar] [CrossRef]
- Li, Z.; Wang, N.; Hernández-Pajares, M.; Yuan, Y.; Krankowski, A.; Liu, A.; Zha, J.; García-Rigo, A.; Roma-Dollase, D.; Yang, H.; et al. IGS real-time service for global ionospheric total electron content modeling. J. Geodesy 2020, 94, 1–16. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | RTCM Data |
|---|---|
| Topcon NET-G5 | 1004, GPS raw measurement |
| BROD (82 km) reference station | 1004, GPS raw measurement 1006, station coordinates |
| KRO1 (1–6 km) reference station | 1004, GPS raw measurement 1006, station coordinates |
| CLK90 | 1264, SSR VTEC RTCM message |
| IGC01 | 1058, SSR SV eph and clock corrections |
| RTCM3EPH | 1019, GPS satellites ephemeries |
| Parameter | Value |
|---|---|
| GNSS system and signals | GPS L1 and L2 |
| Satellite orbits and clocks | Broadcast + SSR correction |
| Positioning model | relative, ionosphere and troposphere weighted |
| First data epoch | 9:35 GPST |
| Last data epoch | 10:30 GPST |
| Data interval | 1 second |
| Session length | 3300 epochs |
| Ambiguity resolution | LAMBDA |
| Ambiguity selection validation | Ratio-test |
| Reference frame | ETRF2000 |
| Min # of satellites | 4 |
| Min satellite elevation | 15 |
| Min satellite SNR | 40 |
| Ref. Station | Baseline (km) | ARSR (%) | AVFR (%) | ARSR_True (%) | Iono Corr. |
|---|---|---|---|---|---|
| KRO1 | 1–6 km | 86.22 | - | - | no |
| BROD | 81.7 | 19.34 | 15.68 | 16.31 | no |
| BROD | 81.7 | 58.66 | 5.03 | 55.71 | yes |
| Parameter | Value |
|---|---|
| GNSS system and signals | GPS L1 and L2 |
| Satellite orbits and clocks | Int. GNSS Service (IGS) ultrarapid (predicted part) |
| Positioning model | relative, ionosphere and troposphere weighted |
| First data epoch | 9:35 GPST |
| Last data epoch | 10:30 GPST |
| Data interval | 1 second |
| Session length | 3300 epochs |
| Ambiguity resolution | LAMBDA |
| Ambiguity selection validation | W-test |
| Reference frame | ETRF2000 |
| PDOP threshold | 7 |
| W-test threshold | 3 |
| Min # of satellites | 4 |
| Ref. Station | Baseline [km] | ARS(%) | AVFR (%) | ARSR_True (%) | Iono. Corr. |
|---|---|---|---|---|---|
| KRO1 | 1–6 km | 77.48 | - | - | no |
| DZIA | 61.8 | 35.88 | 0.87 | 35.56 | no |
| DZIA | 61.8 | 47.98 | 0.41 | 47.78 | yes |
| BROD | 81.7 | 4.61 | 85.21 | 0.68 | no |
| BROD | 81.7 | 33.09 | 8.04 | 30.43 | yes |
| MULTI3 | 60.6–81.7 | 61.67 | 0.13 | 61.59 | no |
| MULTI3 | 60.6–81.7 | 71.60 | 0.11 | 71.52 | yes |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomaszewski, D.; Wielgosz, P.; Rapiński, J.; Krypiak-Gregorczyk, A.; Kaźmierczak, R.; Hernández-Pajares, M.; Yang, H.; OrúsPérez, R. Assessment of Centre National d’Études Spatiales Real-Time Ionosphere Maps in Instantaneous Precise Real-Time Kinematic Positioning over Medium and Long Baselines. Sensors 2020, 20, 2293. https://doi.org/10.3390/s20082293
Tomaszewski D, Wielgosz P, Rapiński J, Krypiak-Gregorczyk A, Kaźmierczak R, Hernández-Pajares M, Yang H, OrúsPérez R. Assessment of Centre National d’Études Spatiales Real-Time Ionosphere Maps in Instantaneous Precise Real-Time Kinematic Positioning over Medium and Long Baselines. Sensors. 2020; 20(8):2293. https://doi.org/10.3390/s20082293
Chicago/Turabian StyleTomaszewski, Dariusz, Paweł Wielgosz, Jacek Rapiński, Anna Krypiak-Gregorczyk, Rafał Kaźmierczak, Manuel Hernández-Pajares, Heng Yang, and Raul OrúsPérez. 2020. "Assessment of Centre National d’Études Spatiales Real-Time Ionosphere Maps in Instantaneous Precise Real-Time Kinematic Positioning over Medium and Long Baselines" Sensors 20, no. 8: 2293. https://doi.org/10.3390/s20082293