Motion Control of a Two-Degree-of-Freedom Linear Resonant Actuator without a Mechanical Spring

Abstract
1. Introduction
2. Proposed 2-DOF LRA
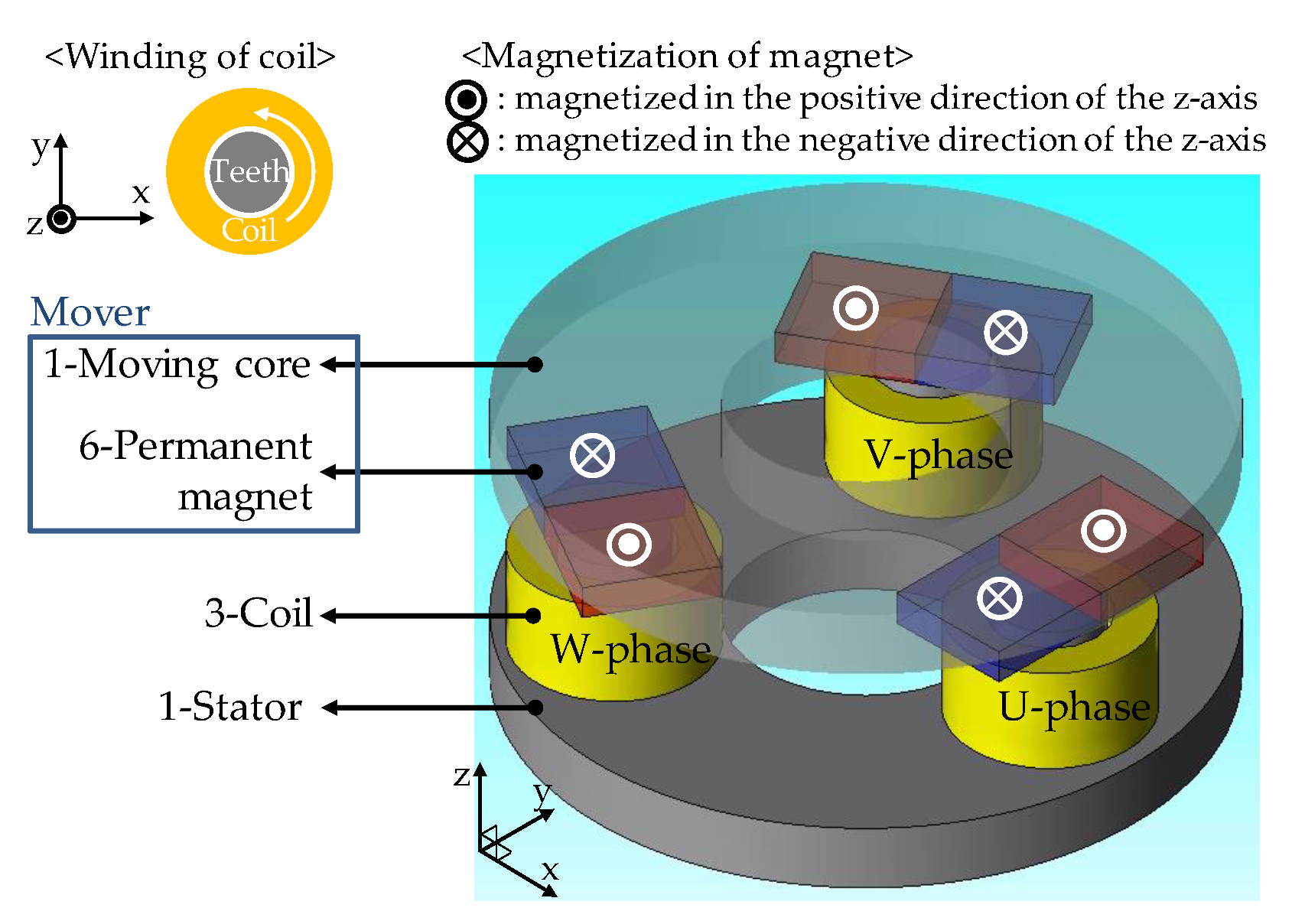
2.1. Structure of 2-DOF LRA
2.2. Detent Characteristics
2.3. Force Constant Characteristics
2.4. Switch States and Force Direction
3. Modelling of 2-DOF LRA
3.1. Mechanical Dynamics
3.2. Electrical Dynamics
3.3. Voltage Reference for Motion Control
3.4. Load Defined
3.5. Model Block Diagram
4. Estimation Method of Motion
5. Simulation Result
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, H.K.; Song, G.Y.; Park, J.S.; Hong, E.P.; Jung, W.H.; Park, K.B. Development of the linear compressor for a household refrigerator. In Proceedings of the 15th International Compressor Engineering Conference, West Lafayette, IN, USA, 25–28 July 2000. [Google Scholar]
- Liang, K. A review of linear compressors for refrigeration. Int. J. Refrig. 2017, 84, 253–273. [Google Scholar] [CrossRef]
- Boldea, I.; Nasar, S. Linear electric actuators and generators. IEEE Trans. Energy Convers. 1999, 14, 712–717. [Google Scholar] [CrossRef]
- Zhu, Z.; Chen, X.; Howe, D.; Iwasaki, S. Electromagnetic Modeling of a Novel Linear Oscillating Actuator. IEEE Trans. Magn. 2008, 44, 3855–3858. [Google Scholar] [CrossRef]
- Zhu, Z.; Chen, X. Analysis of an E-Core Interior Permanent Magnet Linear Oscillating Actuator. IEEE Trans. Magn. 2009, 45, 4384–4387. [Google Scholar] [CrossRef]
- Kato, M.; Nitta, J.; Hirata, K. Optimization of Asymmetric Acceleration Waveform for Haptic Device Driven by Two-Degree-of-Freedom Oscillatory Actuator. IEEJ J. Ind. Appl. 2016, 5, 215–220. [Google Scholar] [CrossRef]
- Kato, M.; Kono, Y.; Hirata, K.; Yoshimoto, T. Development of a Haptic Device Using a 2-DOF Linear Oscillatory Actuator. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Ota, T.; Hirata, K.; Kawase, Y. Dynamic Analysis of Scroll-Actuator Using 3-D Finite Element Method. IEEJ Trans. Ind. Appl. 2001, 121, 178–183. [Google Scholar] [CrossRef]
- Kono, Y.; Yoshimoto, T.; Hirata, K. Characteristics analysis of a haptic device using a 2-DOF linear oscillatory actuator. Int. J. Appl. Electromagn. Mech. 2014, 45, 909–916. [Google Scholar] [CrossRef]
- Liang, K.; Stone, R.; Dadd, M.; Bailey, P. Piston position sensing and control in a linear compressor using a search coil. Int. J. Refrig. 2016, 66, 32–40. [Google Scholar] [CrossRef]
- Chun, T.-W.; Ahn, J.-R.; Lee, H.-H.; Kim, H.-G.; Nho, E.-C. A Novel Strategy of Efficiency Control for a Linear Compressor System Driven by a PWM Inverter. IEEE Trans. Ind. Electron. 2008, 55, 296–301. [Google Scholar] [CrossRef]
- Chun, T.-W.; Ahn, J.-R.; Tran, Q.-V.; Lee, H.-H.; Kim, H.-G. Method of Estimating the Stroke of LPMSM Driven by PWM Inverter in a Linear Compressor. In Proceedings of the 2008 Twenty-Third Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 25 February–1 March 2007; pp. 403–406. [Google Scholar]
- Son, J.-K.; Chun, T.-W.; Lee, H.-H.; Kim, H.-G.; Nho, E.-C. Method of estimating precise piston stroke of linear compressor driven by PWM inverter. In Proceedings of the 2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014; pp. 673–678. [Google Scholar]
- Sanada, M.; Morimoto, S.; Takeda, Y. Analysis for sensorless linear compressor using linear pulse motor. In Proceedings of the Conference Record of the 1999 IEEE Industry Applications Conference, Thirty-Forth IAS Annual Meeting, Phoenix, AZ, USA, 3–7 October 1999. [Google Scholar]
- Sung, J.W.; Lee, C.W.; Kim, G.-S.; Lipo, T.A.; Won, C.-Y.; Choi, S. Sensorless control for linear compressors. Int. J. Appl. Electromagn. Mech. 2006, 24, 273–286. [Google Scholar] [CrossRef]
- Kim, G.-S.; Jeon, J.-Y.; Yim, C.-H. Dynamic Performance Improvement of Oscillating Linear Motors via Efficient Parameter Identification. J. Power Electron. 2010, 10, 58–64. [Google Scholar] [CrossRef]
- Asai, Y.; Hirata, K.; Ota, T. Amplitude Control Method of Linear Resonant Actuator by Load Estimation From the Back-EMF. IEEE Trans. Magn. 2013, 49, 2253–2256. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Mass of mover | M | 60 | (g) |
| Detent force | Fd | Look-up table | (N) |
| Friction load | Fl | 0.5 | (N) |
| Viscous load | cl | 5.0 | (Ns/m) |
| Force constant | Kf | Look-up table | (N/A) |
| Phase resistance | R | 0.2 | (Ω) |
| Phase inductance | L | 1.2 | (mH) |
| Resonant frequency | fn | 37~40 | (Hz) |
| Operating frequency | fo | 40 | (Hz) |
| Carrier frequency | fc | 960 | (Hz) |
| DC-link voltage | Vdc | 3.7 | (V) |
| Rotation angle | θ | 35 | (degree) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, G.; Hirata, K. Motion Control of a Two-Degree-of-Freedom Linear Resonant Actuator without a Mechanical Spring. Sensors 2020, 20, 1954. https://doi.org/10.3390/s20071954
Kim G, Hirata K. Motion Control of a Two-Degree-of-Freedom Linear Resonant Actuator without a Mechanical Spring. Sensors. 2020; 20(7):1954. https://doi.org/10.3390/s20071954
Chicago/Turabian StyleKim, Gyunam, and Katsuhiro Hirata. 2020. "Motion Control of a Two-Degree-of-Freedom Linear Resonant Actuator without a Mechanical Spring" Sensors 20, no. 7: 1954. https://doi.org/10.3390/s20071954
APA StyleKim, G., & Hirata, K. (2020). Motion Control of a Two-Degree-of-Freedom Linear Resonant Actuator without a Mechanical Spring. Sensors, 20(7), 1954. https://doi.org/10.3390/s20071954