Design, Implementation, and Empirical Validation of an IoT Smart Irrigation System for Fog Computing Applications Based on LoRa and LoRaWAN Sensor Nodes †

 ,
,  ,
,  ,
,  , ,
, ,  ,
,  and
and 
Abstract
1. Introduction
- A comprehensive state-of-the-art section is provided on the most relevant academic smart irrigation systems and on the use of LoRa/LoRaWAN for underground scenarios.
- An architecture is proposed for building novel smart irrigation systems based on the deployment of LoRa/LoRaWAN transceivers and fog computing nodes.
- The implementation of the proposed system and its hardware is described in detail so as to allow future developers to replicate it easily.
- The radio planning analysis of the scenario (i.e., a university campus) is presented together with an empirical measurement campaign to corroborate the analytical results.
2. State of the Art
2.1. IoT Smart Irrigation Systems
2.2. Communication Technologies for Smart Irrigation Systems
2.3. LoRa and LoRaWAN in Underground Scenarios
2.4. Key Findings
3. Design and Implementation of the System
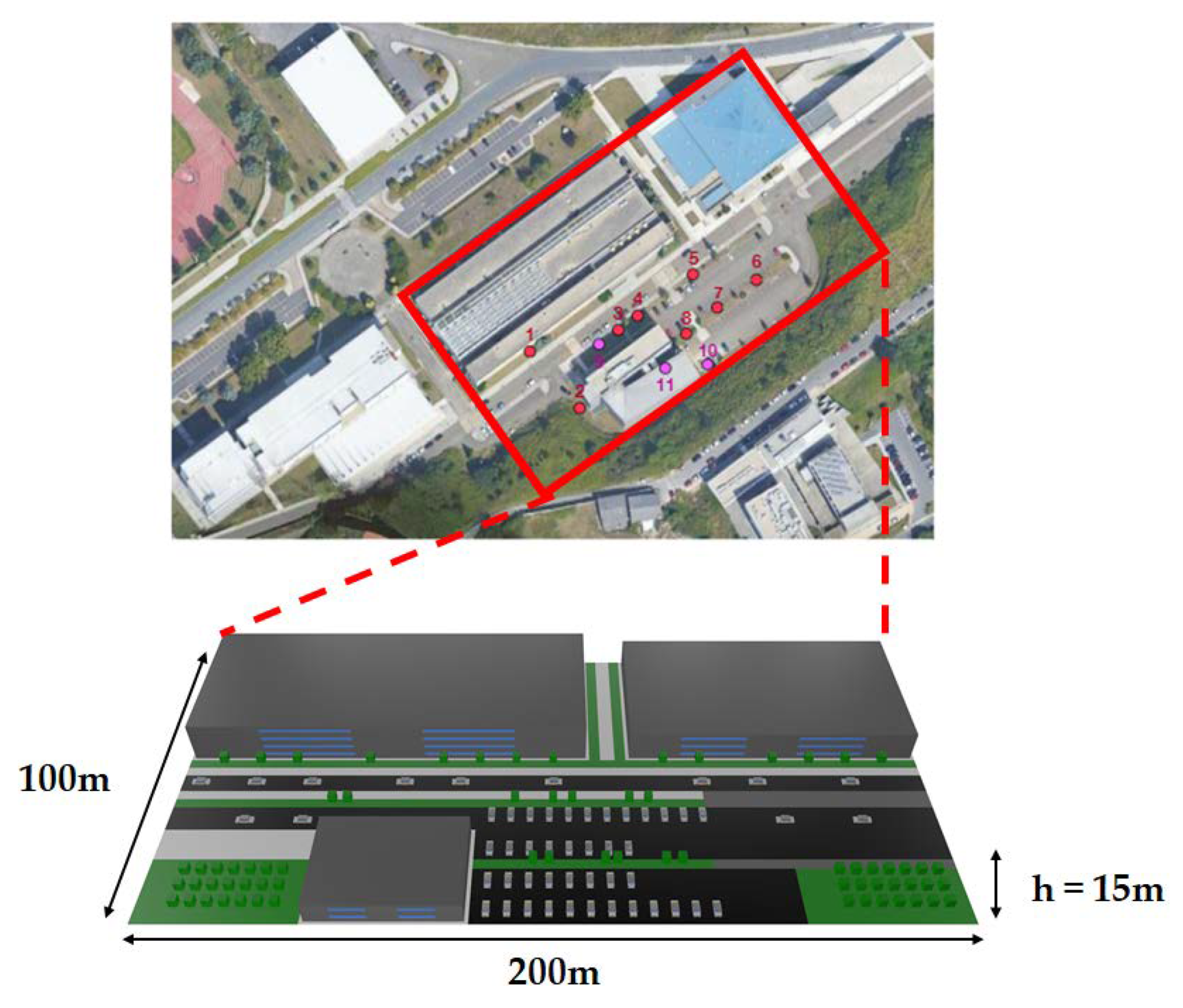
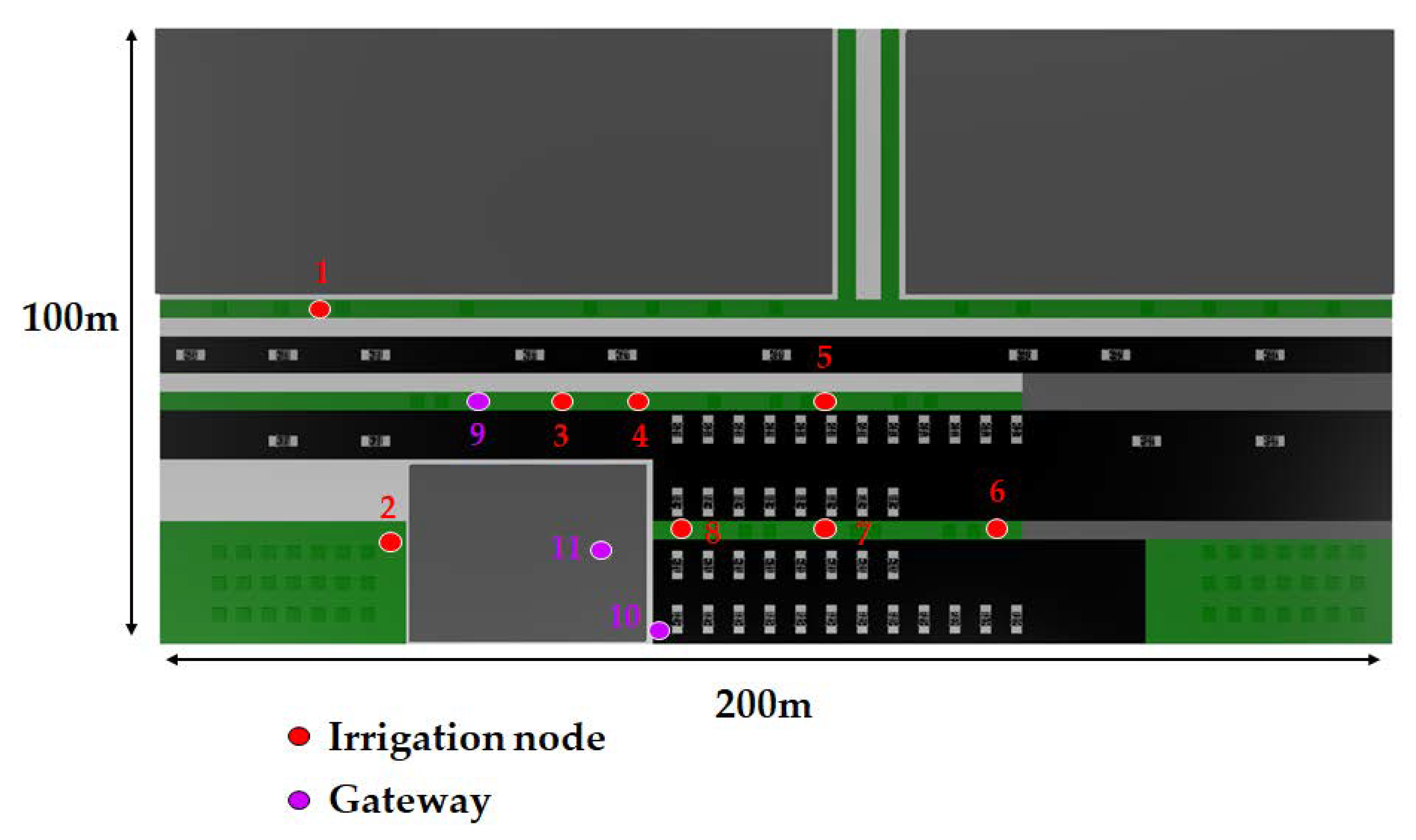
3.1. Smart Irrigation Scenario
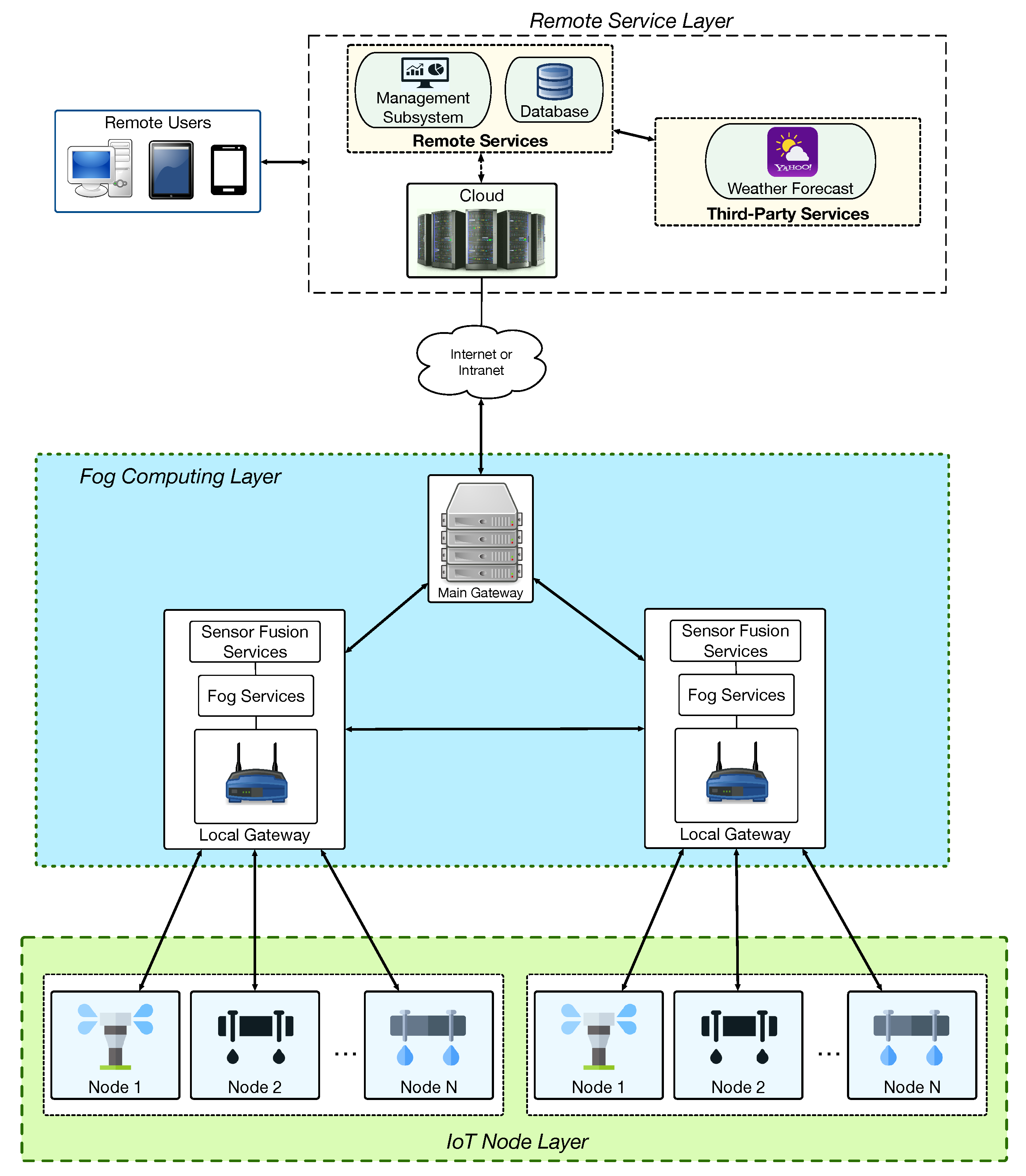
3.2. Designed Communications Architecture
- IoT Node Layer. This layer consists of smart irrigation IoT nodes that exchange information with local gateways. The double arrows that communicate the IoT Node Layer with the Fog Computing Layer in Figure 3 represent bidirectional communications, which indicate that remote commands can be sent to the IoT nodes, while such nodes can send information about the successful execution of the commands (e.g., in order to determine whether the system works properly) or on the state of their sensors.
- Fog Computing Layer. This layer is composed by local gateways distributed over different locations to extend network connectivity across large areas. Such gateways provide redundancy, low-latency responses and distributed processing, thus off-loading tasks from the remote cloud.
- Remote Service Layer. This layer is located in the cloud and collects data from the deployed components of the smart irrigation system. The collected data can be processed and stored on the cloud database in order to be later shown to remote users through a user-friendly interface. Moreover, the services on the cloud can exchange information with useful third-party services (e.g., an external weather forecast service).
3.3. LoRa and LoRaWAN
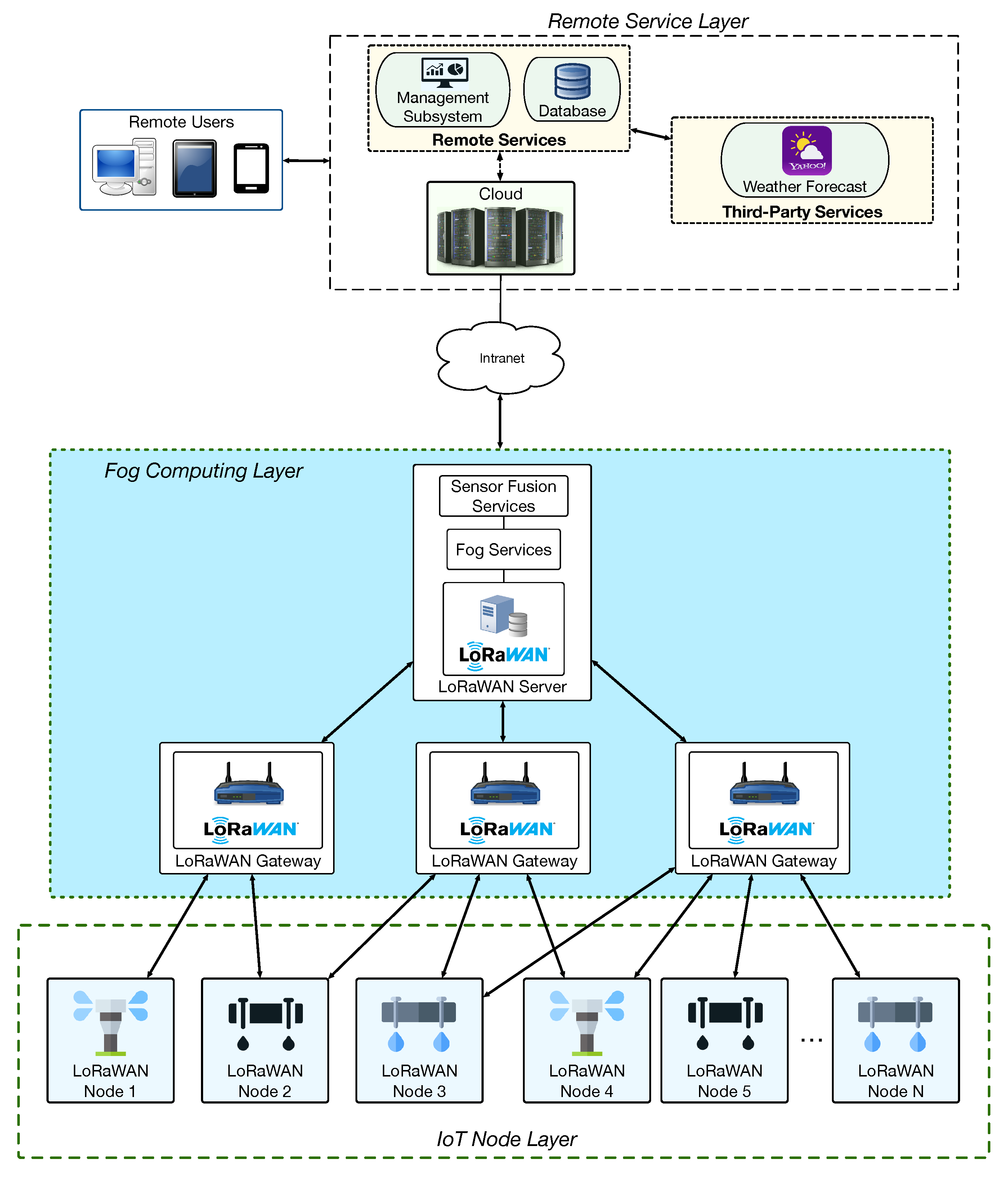
3.4. Implemented Communications Architecture
- IoT Node Layer. This layer is composed of IoT nodes that embed LoRaWAN transceivers, soil sensors, and irrigation actuators. The LoRaWAN packets sent by the IoT nodes can be collected by one or more nearby LoRaWAN gateways.
- Fog Computing Layer. In this layer, LoRaWAN gateways collect packets from the deployed smart irrigation nodes and then send them to a central LoRaWAN server, where they are decoded and processed in order to provide fog computing services.
- Remote Service Layer. It works as it was previously described in Section 3.2.
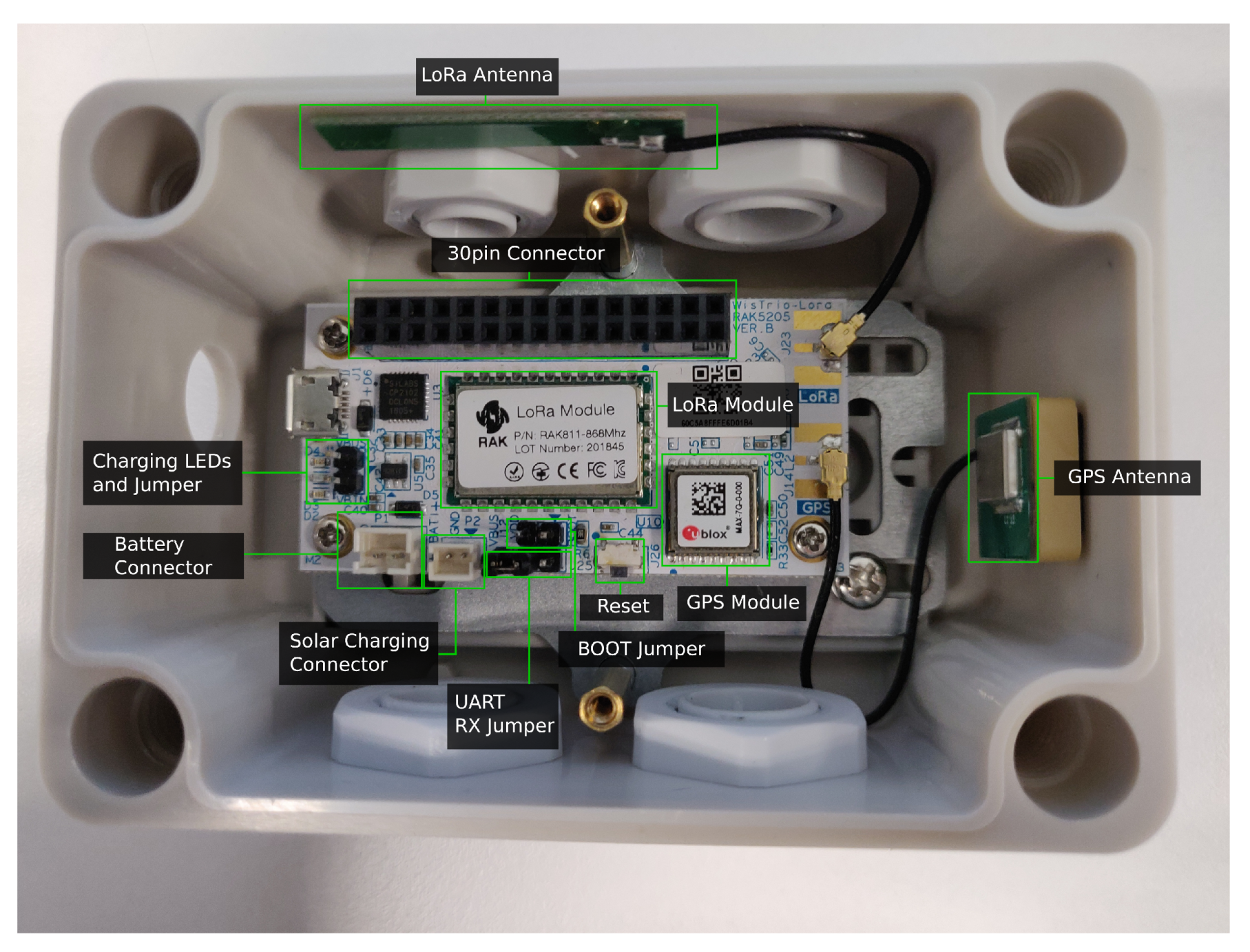
3.5. Implemented IoT Node Layer
3.6. Implemented Fog Computing and Remote Service Layers
- Fog Computing Layer. It makes use of a central LoRaWAN server and LoRaWAN gateways that can be scattered throughout large areas. The LoRaWAN gateways are based on a regular microcontroller (STM32L1), while the LoRaWAN server can be executed on a regular PC. When IoT nodes need to send data, they send a LoRaWAN packet that will be received by the nearest gateway. Then, the gateway forwards the packet to the LoRaWAN server in the local network, which can send it later to the cloud, where all the information from the different LoRaWAN networks is aggregated. The LoRaWAN server is also able to perform local actions based on the received information from a specific area before interacting with the cloud.
- Remote Service Layer. The core of the Remote Service Layer manages data collection through Node-RED [52]. In addition, a MongoDB database [53] is used to store the collected data. Furthermore, this layer is able to make use of third-party services like weather forecasters (for deciding irrigation schedules), which can be easily integrated with the Remote Service Layer through Representational State Transfer (REST) Application Programming Interfaces (APIs).
3.7. Enabled Applications
- Irrigation scheduling can be adjusted dynamically and in a smart way by considering multiple information sources like weather forecasts.
- The system can adjust dynamically to changing environmental conditions, like soil moisture, ground temperature, or real-time weather conditions.
- The system is able to adjust the irrigation schedule dynamically so as to adapt it to the species that are grown on each individual green area.
- In case of having directional irrigators on the IoT nodes, it is possible to establish specific dynamic irrigation patterns with the objective of watering very specific areas.
- The system can be easily scaled (it autonomously connects to the nearest gateway), thus being able to cover large areas thanks to the use of LPWAN technologies.
- It is straightforward to add additional IoT sensor nodes (which do not need to embed irrigation actuators, but only sensors like rain or leaf moisture sensors) in order to provide accurate data on the monitored green areas, thus enhancing the accuracy of the decisions made on the irrigation.
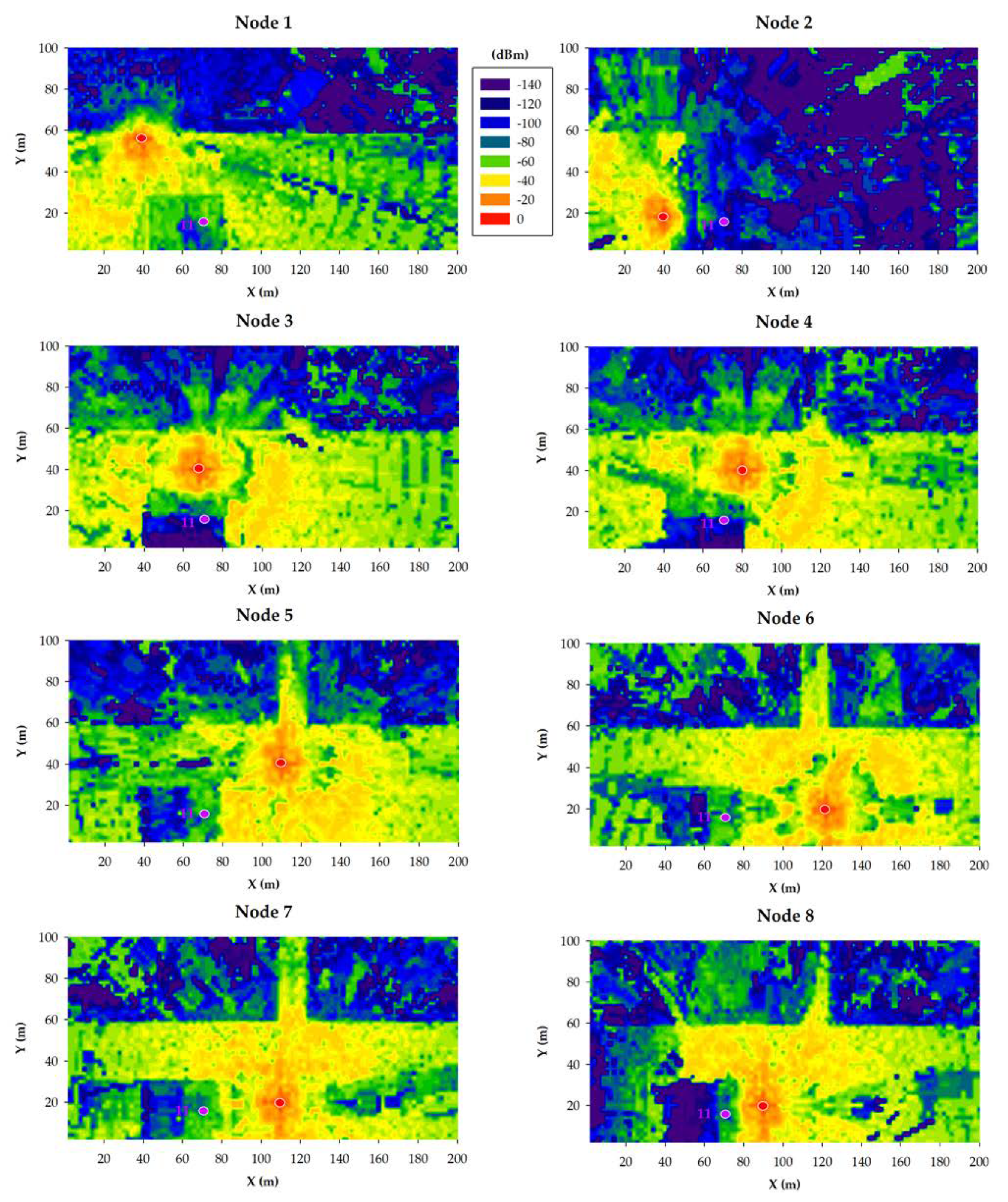
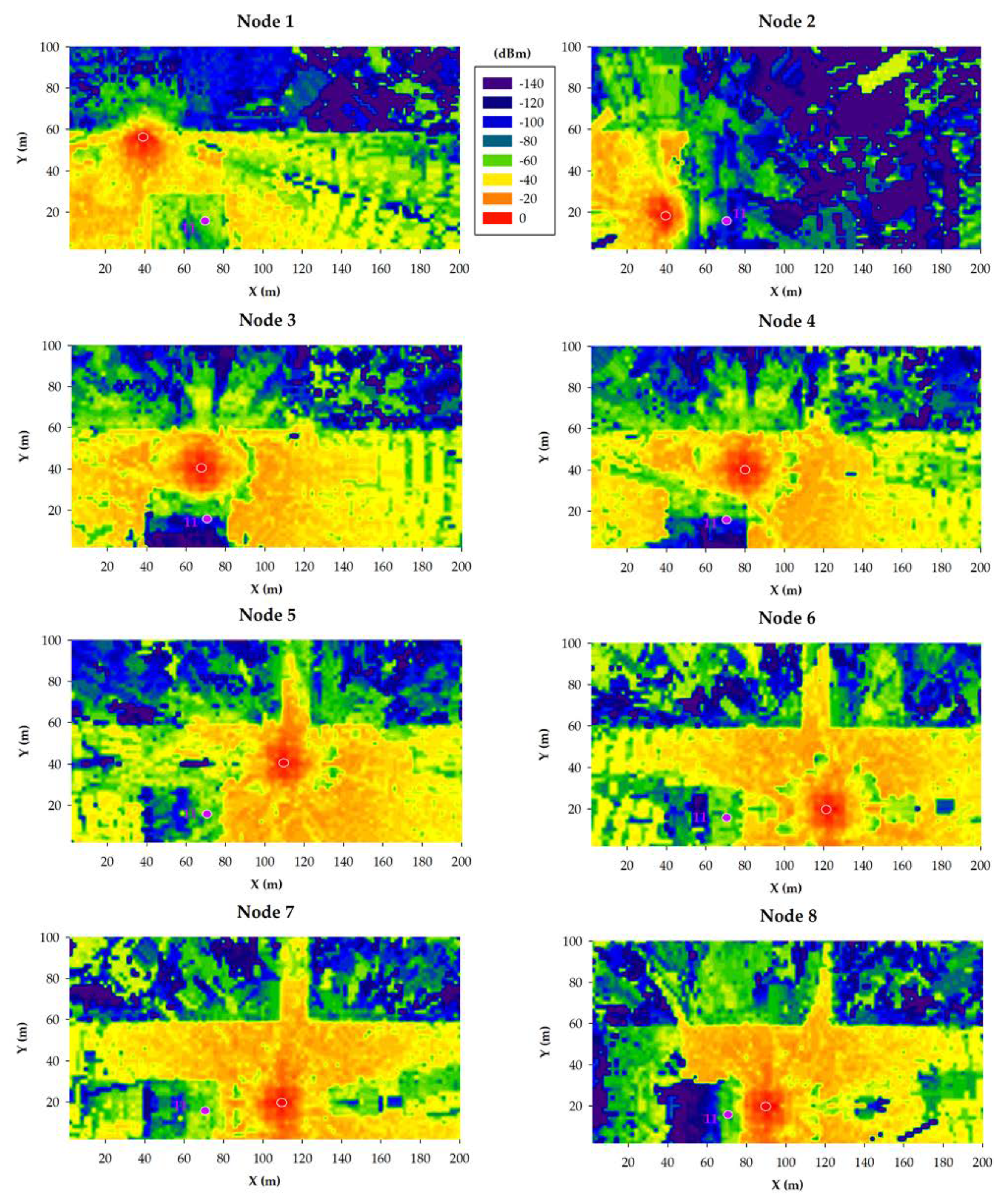
4. Campus Radio Channel Analysis
4.1. Radio Analysis Characteristics
4.2. 3D-RL Scenario
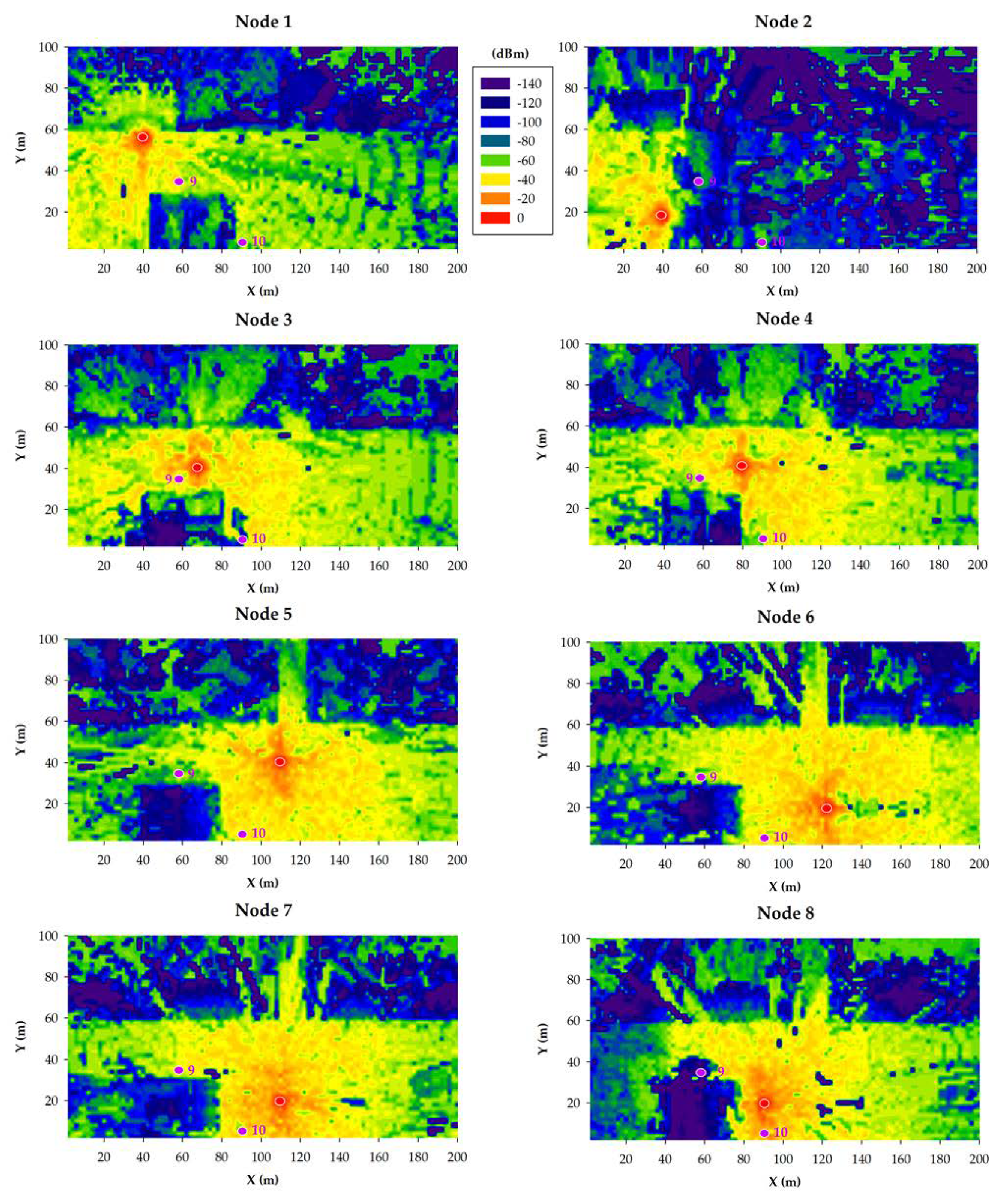
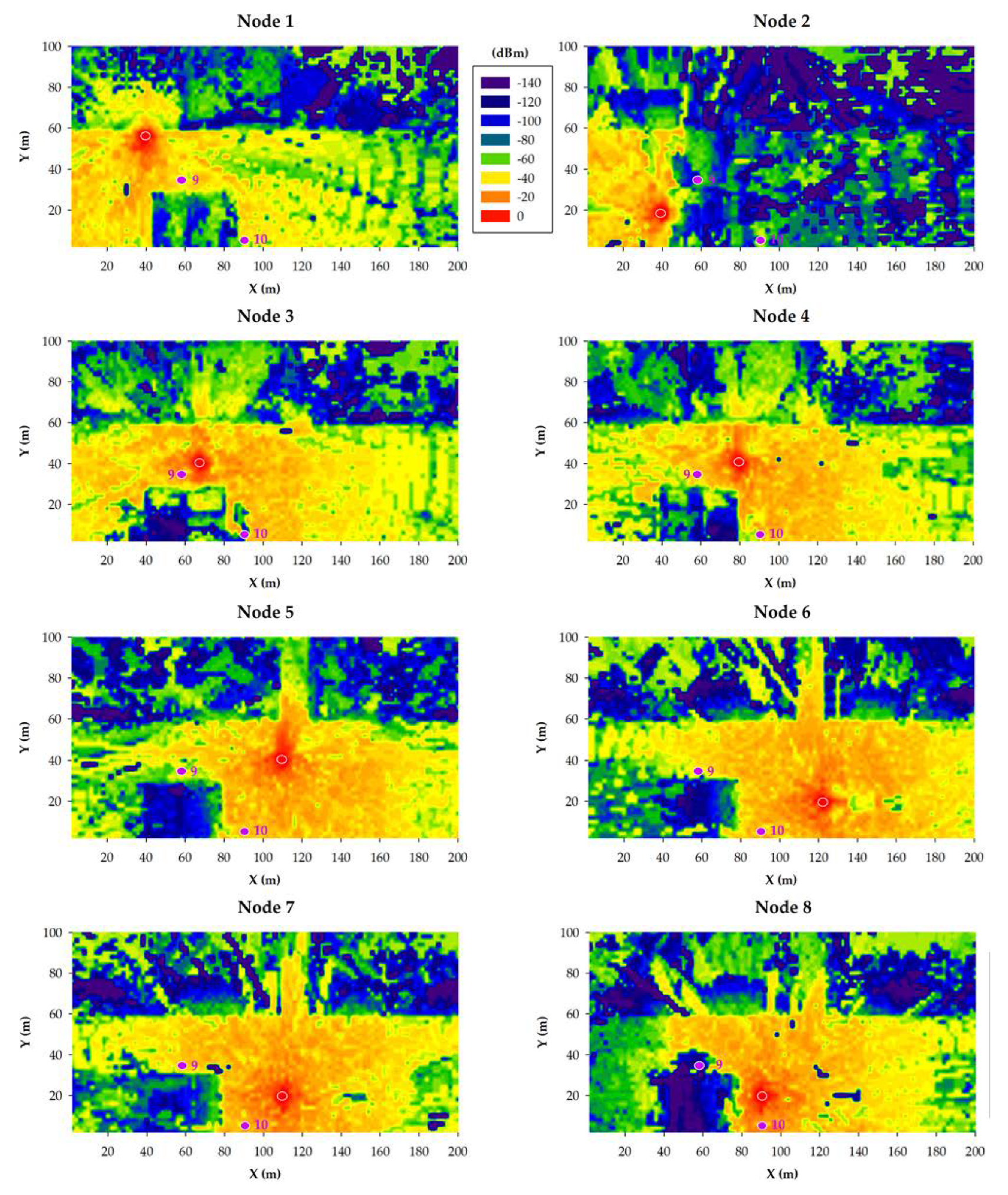
4.3. Simulation Results
5. Experiments
5.1. LoRa/LoRaWAN Smart Irrigation Testbeds
- 868 MHz testbed gateway: a RAK7258 LoRaWAN gateway was used. Such a gateway embeds a Semtech SX1301 LoRaWAN transceiver able to provide full 8-channel communications. The gateway also embeds a Mediatek MT7628 System on Chip (SoC), 128 MB of RAM and WiFi and Ethernet transceivers.
- 433 MHz testbed gateway: a point-to-point connection with two 433 MHz LoRa boards was created. Thus, both 433 MHz nodes made use of the same essential hardware (a Heltec LoRa 32 v1 board), but one acted as an IoT node and the other one as a gateway. As it can be observed in Table 8, the main difference between both nodes is that the gateway made use of a 5 dBi omnidirectional antenna, while the IoT node used a 1 dBi coil antenna.
5.2. Performed Tests
- LoRaWAN is more complex than LoRa. By default, most LoRaWAN transceivers make use of an adaptive algorithm (Adaptative Data Rate, ADR) when transmitting, which implies that their spreading factor and transmission power are adjusted dynamically. In the performed tests, it was observed that, after the transmission of the first packet, the spreading factor was adjusted to a value that remained static for the rest of the transmissions. Likewise, there were no variations in the power level, which was always set in level 1, which implies a transmission power of 14 dBm.
- In the case of LoRa, the ADR algorithm is not executed, so spreading factor and transmit power values remain static and thus independent from the communications conditions. During the tests, the maximum allowed transmission power for the EU433 band was used, which corresponds to a spreading factor of 12 and a power transmission of 20 dBm.
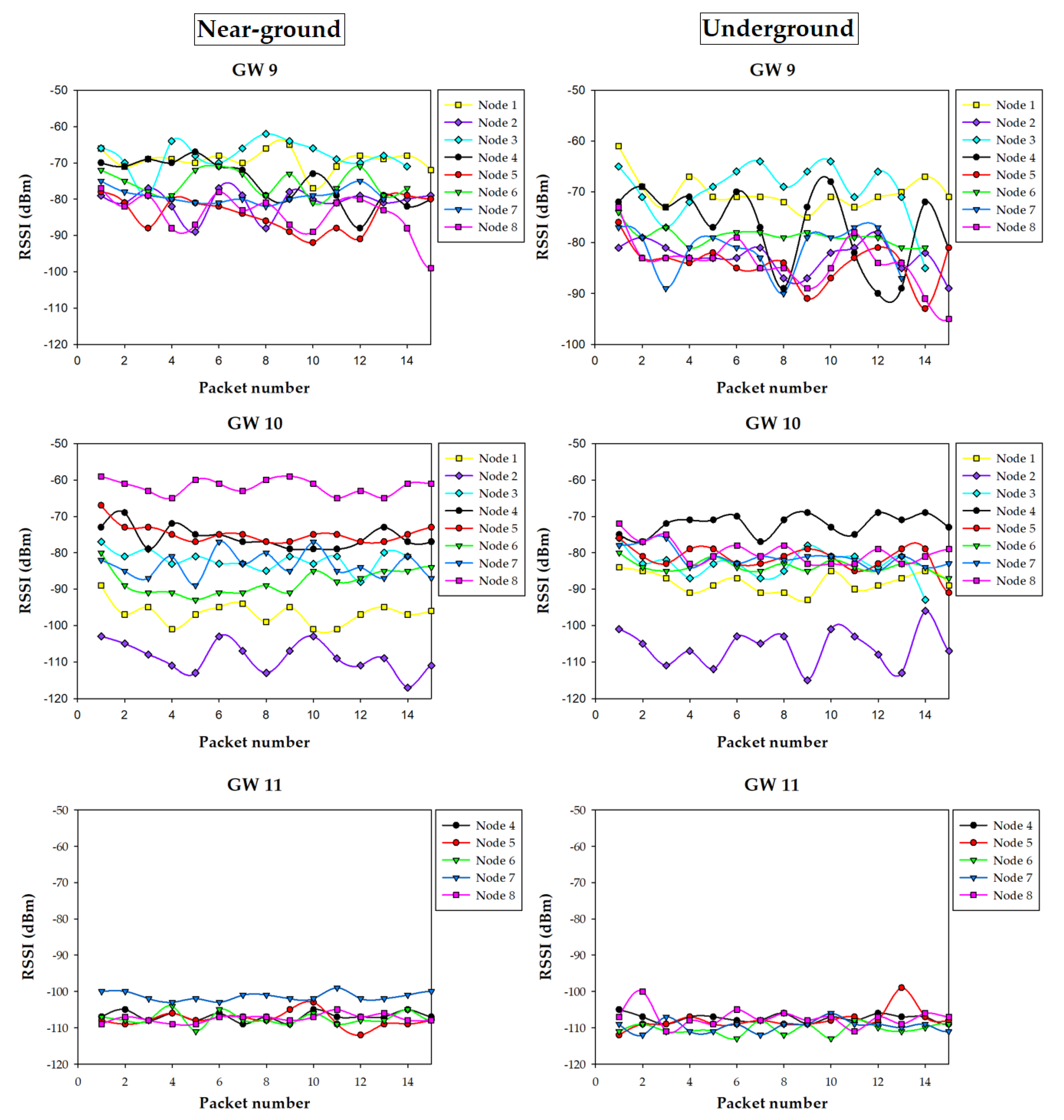
5.3. Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- UN Water 2014. Available online: https://www.unccd.int/issues/land-and-drought (accessed on 30 September 2020).
- Hirabayashi, Y.; Mahendran, R.; Koirala, S.; Konoshima, L.; Yamazaki, D.; Watanabe, S.; Kim, H.; Kanae, S. Global flood risk under climate change. Nat. Clim. Chang. 2013, 3, 816–821. [Google Scholar] [CrossRef]
- Ballerini, M.; Polonelli, T.; Brunelli, D.; Magno, M.; Benini, L. NB-IoT Versus LoRaWAN: An Experimental Evaluation for Industrial Applications. IEEE Trans. Ind. Inform. 2020, 16, 7802–7811. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Celaya-Echarri, M.; Lopez-Iturri, P.; Castedo, L.; Azpilicueta, L.; Aguirre, E.; Suárez-Albela, M.; Falcone, F.; Fernández-Caramés, T.M. Design and Experimental Validation of a LoRaWAN Fog Computing Based Architecture for IoT Enabled Smart Campus Applications. Sensors 2019, 19, 3287. [Google Scholar] [CrossRef] [PubMed]
- Ali, Z.; Henna, S.; Akhunzada, A.; Raza, M.; Kim, S.W. Performance Evaluation of LoRaWAN for Green Internet of Things. IEEE Access 2019, 7, 164102–164112. [Google Scholar] [CrossRef]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog Computing and its Role in the Internet of Things. In Proceedings of the First, Edition of the MCC Workshop on Mobile Cloud Computing, Helsinki, Finland, 17 August 2012; pp. 13–16. [Google Scholar]
- Dolui, K.; Datta, S.K. Comparison of edge computing implementations: Fog computing, cloudlet and mobile edge computing. In Proceedings of the Global Internet of Things Summit (GIoTS), Geneva, Switzerland, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Puliafito, C.; Mingozzi, E.; Longo, F.; Puliafito, A.; Rana, O. Fog Computing for the Internet of Things: A Survey. ACM Trans. Internet Technol. 2019, 19, 1–41. [Google Scholar] [CrossRef]
- Vasconcelos, D.R.; Andrade, R.M.C.; Severino, V.; De Souza, J.N. Cloud, Fog, or Mist in IoT? That Is the Question. ACM Trans. Internet Technol. 2019, 19, 1–20. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Vilar-Montesinos, M. A Fog Computing and Cloudlet Based Augmented Reality System for the Industry 4.0 Shipyard. Sensors 2018, 18, 1798. [Google Scholar] [CrossRef]
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.M. Internet-of-Things (IoT)-Based Smart Agriculture: Toward Making the Fields Talk. IEEE Access 2019, 7, 129551–129583. [Google Scholar] [CrossRef]
- Khan, R.; Ali, I.; Zakarya, M.; Ahmad, M.; Imran, M.; Shoaib, M. Technology-Assisted Decision Support System for Efficient Water Utilization: A Real-Time Testbed for Irrigation Using Wireless Sensor Networks. IEEE Access 2018, 6, 25686–25697. [Google Scholar] [CrossRef]
- Togneri, R.; Kamienski, C.; Dantas, R.; Prati, R.; Toscano, A.; Soininen, J.; Cinotti, T.S. Advancing IoT-Based Smart Irrigation. IEEE Internet Things Mag. 2019, 2, 4. [Google Scholar] [CrossRef]
- Boursianis, A.D. Smart Irrigation System for Precision Agriculture—The AREThOU5A IoT Platform. IEEE Sens. J. 2020. [Google Scholar] [CrossRef]
- Munir, M.S.; Bajwa, I.S.; Naeem, M.A.; Ramzan, B. Design and Implementation of an IoT System for Smart Energy Consumption and Smart Irrigation in Tunnel Farming. Energies 2018, 11, 3427. [Google Scholar] [CrossRef]
- Parra, L.; Jimenez, J.M.; Lloret, J.; Lorenz, P. IoT-Based Smart Irrigation Systems: An Overview on the Recent Trends on Sensors and IoT Systems for Irrigation in Precision Agriculture. Sensors 2020, 20, 1042. [Google Scholar]
- Ikpehai, A.; Adebisi, B.; Rabie, K.M.; Anoh, K.; Ande, R.E.; Hammoudeh, M.; Gacanin, H.; Mbanaso, U.M. Low-Power Wide Area Network Technologies for Internet-of-Things: A Comparative Review. IEEE Internet Things J. 2019, 6, 2. [Google Scholar] [CrossRef]
- Gloria, A.; Dionisio, C.; Simões, G.; Sebastião, P.; Souto, N. WSN Application for Sustainable Water Management in Irrigation Systems. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 833–836. [Google Scholar]
- Usmonov, M.; Gregoretti, F. Design and implementation of a LoRa based wireless control for drip irrigation systems. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017; pp. 248–253. [Google Scholar]
- Zhao, W.; Lin, S.; Han, J.; Xu, R.; Hou, L. Design and Implementation of Smart Irrigation System Based on LoRa. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Citoni, B.; Fioranelli, F.; Imran, M.A.; Abbasi, Q.H. Internet of Things and LoRaWAN-Enabled Future Smart Farming. IEEE Internet Things Mag. 2019, 2, 4. [Google Scholar] [CrossRef]
- Miyashita, M. Evaluation of Wireless Communication for Maintenance of Underground Power Transmission Lines. In Proceedings of the 2019 7th International Conference on Smart Grid (icSmartGrid), Newcastle, Australia, 9–11 December 2019; pp. 81–86. [Google Scholar]
- Liu, F.; Yang, J.; Feng, T.; Chen, X.; Jia, W.; Shan, C. LoRa-based belt transporter communication system. In Proceedings of the 5th International Conference on Communication and Information Processing (ICCIP ’19), Chongqing, China, 15–17 November 2019; Association for Computing Machinery: New York, NY, USA, 2019. [Google Scholar]
- Branch, P.; Cricenti, T. A LoRa Relay Based System for Detonating Explosives in Underground Mines. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; pp. 259–264. [Google Scholar]
- Hardie, M.; Hoyle, D. Underground Wireless Data Transmission Using 433-MHz LoRa for Agriculture. Sensors 2019, 19, 4232. [Google Scholar] [CrossRef] [PubMed]
- Wohwe Sambo, D.; Forster, A.; Yenke, B.O.; Sarr, I.; Gueye, B. Wireless Underground Sensor Networks Path Loss Model for Precision Agriculture (WUSN-PLM). IEEE Sens. J. 2020, 20, 10. [Google Scholar] [CrossRef]
- Sidorov, M.; Nhut, P.V.; Matsumoto, Y.; Ohmura, R. LoRa-Based Precision Wireless Structural Health Monitoring System for Bolted Joints in a Smart City Environment. IEEE Access. 2019, 7, 10. [Google Scholar] [CrossRef]
- Yu, X.; Han, W.; Zhang, Z. Path loss estimation for wireless underground sensor network in agricultural application. Agric. Res. 2017, 6, 97–102. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Stuntebeck, E.P. Wireless underground sensor networks: Research challenges. Agric. Res. 2017, 6, 97–102. [Google Scholar] [CrossRef]
- Silva, A.R.; Vuran, M.C. Communication with aboveground devices in wireless underground sensor networks: An empirical study. In Proceedings of the IEEE ICC ’10, Cape Town, South Africa, 23–27 May 2010. [Google Scholar]
- Fraga-Lamas, P.; Fernández-Caramés, T.M. Reverse Engineering the Communications Protocol of an RFID Public Transportation Card. In Proceedings of the 2017 IEEE International Conference on RFID (IEEE RFID 2017), Phoenix, AZ, USA, 9–11 May 2017; pp. 30–35. [Google Scholar]
- Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Castedo, L. A Methodology for Evaluating Security in Commercial RFID Systems, Radio Frequency Identification. In Radio Frequency Identification, 1st ed.; Crepaldi, P.C., Pimenta, T.C., Eds.; INTECH: Rijeka, Croatia, 2016. [Google Scholar]
- Vyas, R.; Tye, B. A Sequential RFID System for Robust Communication with Underground Carbon Steel Pipes in Oil and Gas Applications. Electronics 2019, 8, 1374. [Google Scholar] [CrossRef]
- Abdelnour, A.; Lazaro, A.; Villarino, R.; Kaddour, D.; Tedjini, S.; Girbau, D. Passive Harmonic RFID System for Buried Assets Localization. Sensors 2018, 18, 3635. [Google Scholar] [CrossRef] [PubMed]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A Study of LoRa: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar]
- Wan, X.; Yang, Y.; Cui, J.; Sardar, M.S. Lora propagation testing in soil for wireless underground sensor networks. In Proceedings of the 2017 Sixth Asia-Pacific Conference on Antennas and Propagation (APCAP), Xi’an, China, 16–19 October 2017; pp. 1–3. [Google Scholar]
- Wan, X.; Du, X.; Yang, Y.; Zhang, J.; Sardar, M.S.; Jian, C. Smartphone based LoRa in-soil propagation measurement for wireless underground sensor networks. In Proceedings of the 2017 IEEE Conference on Antenna Measurements & Applications (CAMA), Tsukuba, Japan, 4–6 December 2017; pp. 114–117. [Google Scholar]
- Wan, X.; Yang, Y.; Du, X.; Sardar, M.S. Design of propagation testnode for LoRa based wireless underground sensor networks. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium—Fall (PIERS-FALL), Singapore, 19–22 November 2017; pp. 579–583. [Google Scholar]
- Lin, K.; Hao, T.; Yu, Z.; Zheng, W.; He, W. A Preliminary Study of UG2AG Link Quality in LoRa-based Wireless Underground Sensor Networks. In Proceedings of the 2019 IEEE 44th Conference on Local Computer Networks (LCN), Osnabrueck, Germany, 14–17 October 2019; pp. 51–59. [Google Scholar]
- Petajajarvi, J.; Mikhaylov, K.; Roivainen, A.; Hanninen, T.; Pettissalo, M. On the coverage of LPWANs: Range evaluation and channel attenuation model for LoRa technology. In Proceedings of the 2015 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015. [Google Scholar]
- Seye, M.R.; Ngom, B.; Gueye, B.; Diallo, M. A Study of LoRa Coverage: Range Evaluation and Channel Attenuation Model. In Proceedings of the 2018 1st International Conference on Smart Cities and Communities (SCCIC), Ouagadougou, Burkina Faso, 24–26 July 2018. [Google Scholar]
- Ojo, M.O.; Adami, D.; Giordano, S. Network Performance Evaluation of a LoRa-based IoT System for Crop Protection Against Ungulates. In Proceedings of the 2020 IEEE 25th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Pisa, Italy, 14–16 September 2020. [Google Scholar]
- Bhattacherjee, S.S.; Shreeshan, S.; Priyanka, G.; Jadhav, A.R.; Rajalakshmi, P.; Kholova, J. Cloud based Low-Power Long-Range IoT Network for Soil Moisture monitoring in Agriculture. In Proceedings of the 2020 IEEE Sensors Applications Symposium (SAS), Kuala Lumpur, Malaysia, 9–11 March 2020. [Google Scholar]
- Wiklundh, K.C. Understanding the IoT technology LoRa and its interference vulnerability. In Proceedings of the 2019 International Symposium on Electromagnetic Compatibility—EMC EUROPE, Barcelona, Spain, 2–6 September 2019. [Google Scholar]
- Marquez, L.E.; Osorio, A.; Calle, M.; Velez, J.C.; Serrano, A.; Candelo-Becerra, J.E. On the Use of LoRaWAN in Smart Cities: A Study With Blocking Interference. IEEE Internet Things J. 2020, 7, 2806–2815. [Google Scholar] [CrossRef]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A Survey of LoRaWAN for IoT: From Technology to Application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [PubMed]
- Semtech LoRa Developer Portal Technical documents. Available online: https://bit.ly/3l4vhjp (accessed on 30 September 2020).
- DS18S20 Maximintegrated Oficial Webpage. Available online: https://www.maximintegrated.com/en/products/sensors/DS18B20.html (accessed on 30 September 2020).
- SHT15 Sensirion Oficial Webpage. Available online: https://www.sensirion.com/en/environmental-sensors/humidity-sensors/digital-humidity-sensors-for-accurate-measurements/ (accessed on 30 September 2020).
- Heltec LoRa 32 V2. Oficial Webpage. Available online: https://heltec.org/project/wifi-lora-32/ (accessed on 30 September 2020).
- MeteoGalicia. Oficial Webpage. Available online: https://meteogalicia.ga (accessed on 12 November 2020).
- Node-RED. Oficial Webpage. Available online: https://nodered.org/ (accessed on 30 September 2020).
- MongoDB. Oficial Webpage. Available online: https://www.mongodb.com/ (accessed on 30 September 2020).
- Miller, T.W.; Borchers, B.; Hendrickx, J.M.; Hong, S.; Dekker, L.W.; Ritsema, C.J. Effects of soil physical properties on GPR for landmine detection. In Proceedings of the Fifth International Symposium on Technology and the Mine Problem, Monterey, CA, USA, 22–26 April 2002. [Google Scholar]
- Wait, J.; Fuller, J. On radio propagation through earth. IEEE Trans. Antennas Propag. 1971, 19, 796–798. [Google Scholar] [CrossRef]
- Weldon, T.P.; Rathore, A.Y. Wave Propagation Model and Simulations for Landmine Detection; University of North Carolina–Charlotte, Department of Electrical and Computer Engineering: Chapel Hill, NC, USA, 1999. [Google Scholar]
- Akyildiz, I.F.; Stuntebeck, E.P. Wireless underground sensor networks: Research challenges. Ad Hoc Netw. 2006, 4, 669–686. [Google Scholar] [CrossRef]
- Swathi, S.; Santhanam, S.M. An Efficient MI Waveguide Based Underground Wireless Communication for Smart Irrigation. In Proceedings of the 14th IEEE India Council International Conference (INDICON), Roorkee, India, 15–17 December 2017; pp. 1–6. [Google Scholar]
- Yu, X.; Wu, P.; Zhang, Z.; Wang, N.; Han, W. Electromagnetic Wave Propagation in Soil for Wireless Underground Sensor Networks. Prog. Electromagn. Res. 2013, 30, 11–23. [Google Scholar] [CrossRef]
- Sarkar, T.K.; Ji, Z.; Kim, K.; Medouri, A.; Salazar-Palma, M. A survey of various propagation models for mobile communication. IEEE Antennas Propag. Mag. 2003, 45, 51–82. [Google Scholar] [CrossRef]
- Bertoni, H.L. Radio Propagation for Modern Wireless Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- Seidel, S.Y.; Rappaport, T.S. Site-specific propagation prediction for wireless in-building personal communication system design. IEEE Trans. Veh. Technol. 1994, 43, 879–891. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Lopez-Iturri, P.; Aguirre, E.; Vargas-Rosales, C.; León, A.; Falcone, F. Influence of Meshing Adaption in Convergence Performance of Deterministic Ray Launching Estimation in Indoor Scenarios. J. Electromagn. Waves Appl. 2017, 31, 544–559. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Rawat, M.; Rawat, K.; Ghannouchi, F.; Falcone, F. A Ray Launching-Neural Network Approach for Radio Wave Propagation Analysis in Complex Indoor Environments. IEEE Trans. Antennas Propag. 2014, 62, 2777–2786. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Vargas-Rosales, C.; Falcone, F. Deterministic Propagation Prediction in Vehicular Environments. IEEE Veh. Technol. Mag. 2016, 11, 29–37. [Google Scholar] [CrossRef]
- Granda, F.; Azpilicueta, L.; Vargas-Rosales, C.; Celaya-Echarri, M.; Lopez-Iturri, P.; Aguirre, E.; Astrain, J.J.; Medrano, P.; Villandangos, J.; Falcone, F. Deterministic Propagation Modeling for Intelligent Vehicle Communication in Smart Cities. Sensors 2018, 18, 2133. [Google Scholar] [CrossRef] [PubMed]
- Azpilicueta, L.; López-Iturri, P.; Aguirre, E.; Mateo, I.; Astrain, J.J.; Villadangos, J.; Falcone, F. Analysis of Radio Wave Propagation for ISM 2.4 GHz Wireless Sensor Networks in Inhomogeneous Vegetation Environment. Sensors 2014, 14, 23650–23672. [Google Scholar] [CrossRef]
- Vyacheslav, V.K. Handbook of Dielectric and Thermal Properties of Materials at Microwave Frequencies; Artech House Inc.: Boston, MA, USA; London, UK, 2012. [Google Scholar]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Noceda-Davila, D.; Vilar-Montesinos, M. RSS stabilization techniques for a real-time passive UHF RFID pipe monitoring system for smart shipyards. In Proceedings of the 2017 IEEE International Conference on RFID (IEEE RFID 2017), Phoenix, AZ, USA, 9–11 May 2017; pp. 161–166. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Objective | Water Distribution | Scheduled Irrigation | Actuators | Monitoring Parameters | IoT Nodes (Microcontrollers, SBCs) | Communication Technologies | Cloud Platforms | Performance Indicators | Advanced Features |
|---|---|---|---|---|---|---|---|---|---|
| Wireless Sensor Network | Flood irrigation | Estimated needs | Motor/Pumps | Air temperature | Arduino | Cellular 4G/5G | FIWARE | Expenditure in irrigation (€/m3 by year) | Machine learning (AI) |
| Control System | Spray irrigation | Ad hoc | Valves | Water level | Node MCU | Bluetooth, BLE | Thingspeak | Irrigation (m3/year) | Thermal imaging |
| Decision Support System (DSS) | Drip irrigation | Sprinkler | Water conductivity | Arduino Mega | RFID | Energy consumption | Energy harvesting | ||
| Testbed | Nebulizer irrigation | Water temperature | Raspberry Pi | ZigBee | Remote sensing | ||||
| Others (e.g., robot) | Rain | Intel Galileo Gen-2 | Z-Wave | Fuzzy logic | |||||
| PH (soil or water) | ATmega series | Thread | |||||||
| Humidity | MSP series | WiFi 802.15b/g/n/ac/ah | |||||||
| Soil moisture | STM series | LoRaWAN | |||||||
| Plants heigh | SigFox | ||||||||
| Leaf wetness | NB-IoT | ||||||||
| Weather forecast | LTE-M | ||||||||
| Wind | MIOTY | ||||||||
| RPMA |
| Reference | System Type | Location | Covered Area (km2) | Communication Technologies | Sensors and Actuators | Fog/Edge Computing Support |
|---|---|---|---|---|---|---|
| Khan et al. [12] | DSS | Orange orchard | Small area | Xbee 802.15.4 module | Soil moisture, temperature, air humidity, and leaf wetness | No |
| Togneri et al. [13] | IoT ML-based framework | Spain and Brazil (different needs) | - | LoRaWAN/4G | Moisture sensor probes | Fog support (no implementation) |
| Gloria et al. [18] | WSN for water saving | Small garden, Instituto Universitario de Lisboa | - | LoRa, WiFi, BLE | Temperature, humidity and soil moisture | No |
| Usmonov et al. [19] | Drip irrigation testbed | No practical deployment | - | LoRaWAN, WiFi | No sensors, but supports up to four actuators per node) | No |
| Zhao et al. [20] | Testbed, Proof-of-Concept | Urban environment | Up to 8 km (covering an area of up to 2 km2 | LoRaWAN | Actuators only (water pump, mist sprayer) | No |
| Citoni et al. [21] | Review state-of-the-art | - | Large-scale deployments | LoRaWAN | - | - |
| Proposed Solution | IoT smart irrigation system simulation and empirical validation | University campus | 7500 m2 | LoRa, LoRaWAN | Each node has soil moisture/temperature and air temperature sensors, and a solenoid valve | Yes |
| Parameter | Value |
|---|---|
| Frequency band | EU433 (433.05–434.79 MHz), EU864-870 (863–870 MHz) |
| Channels | 10 |
| Channel bandwidth | 125 KHz or 250 KHz |
| Transmission power | 14 dBm |
| Max output power | 20 dBm |
| Spreading factor | 7–12 |
| Data rate | 250 bps–5.5 kbps |
| Link budget | 155 dB |
| Range | 5 km (urban), 15 km (suburban), 45 km (rural) |
| Topology | star |
| Battery lifetime | years |
| Power efficiency | very high |
| Interference immunity | very high |
| Scalability | yes |
| Parameters | Permittivity (εr) | Conductivity [S/m] |
|---|---|---|
| Air | 1 | 0 |
| Glass | 6.06 | 10−12 |
| Concrete | 5.66 | 0.142 |
| Metal | 4.5 | 4 × 107 |
| Rubber | 2.61 | 0 |
| Tree foliage | [68] | [68] |
| Tree trunk | 1.4 | 0.021 |
| Grass | 30 | 0.01 |
| Parameter | EU868 Band | EU433 Band |
|---|---|---|
| Frequency | 868.3 MHz | 433.5 MHz |
| Power | 16 dBm | 20 dBm |
| Reflections | 6 | 6 |
| Cuboids | 2 m × 2 m × 1 m | 2 m × 2 m × 1 m |
| Rays resolution | 1° | 1° |
| Antenna | Monopole, 5.8 dBi | Monopole, 5 dBi |
| Characteristic | Value |
|---|---|
| Protocol | LoRaWAN 1.0.2 |
| RF Module | SX1278 |
| RF Sensitivity | −148 dBm |
| Maximum Tx Power | 20 dBm–100 mW |
| Antenna | PCB dipole 1 dBi gain |
| Maximum Link Budget | 168 dBi |
| CPU | ARM Cortex-M3 (32 bits) |
| Clock Speed | 32 MHz |
| RAM | 32 KB |
| ROM | 128 KB |
| Characteristic | Value |
|---|---|
| Protocol | LoRa |
| RF Module | SX1278 |
| RF Sensitivity | −148 dBm |
| Maximum TX Power | 20 dBm–100 mW |
| Antenna | Coil Antenna (dipole) aprox. 1 dBi gain |
| Maximum Link Budget | 168 dBi |
| CPU | ESP32 - Tensilica LX6 dual core |
| Clock speed | 240 MHz (maximum) |
| RAM | 520 KB |
| ROM (Flash) | 8 MB |
| Band | 868 MHz - EU868 | 433 MHz - EU433 |
|---|---|---|
| Protocol | LoRaWAN | LoRa |
| RF Module | SX1301 | SX1278 |
| RF Sensitivity | −142 dBm | −148 dBm |
| Transmission TX Power | 14 dBm | 20 dBm |
| Receiver Antenna | Omnidirectional 5.8 dBi gain | Horizontal-Polarization Omnidirectional 5 dBi gain |
| Sender Antenna | 1 dBi PCB Antenna | 1 dBi Coil Antenna |
| Spread Factor | Adaptative (from 9 to 12) | 12 |
| Channel Bandwidth | 125 KHz | 125 KHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Froiz-Míguez, I.; Lopez-Iturri, P.; Fraga-Lamas, P.; Celaya-Echarri, M.; Blanco-Novoa, Ó.; Azpilicueta, L.; Falcone, F.; Fernández-Caramés, T.M. Design, Implementation, and Empirical Validation of an IoT Smart Irrigation System for Fog Computing Applications Based on LoRa and LoRaWAN Sensor Nodes. Sensors 2020, 20, 6865. https://doi.org/10.3390/s20236865
Froiz-Míguez I, Lopez-Iturri P, Fraga-Lamas P, Celaya-Echarri M, Blanco-Novoa Ó, Azpilicueta L, Falcone F, Fernández-Caramés TM. Design, Implementation, and Empirical Validation of an IoT Smart Irrigation System for Fog Computing Applications Based on LoRa and LoRaWAN Sensor Nodes. Sensors. 2020; 20(23):6865. https://doi.org/10.3390/s20236865
Chicago/Turabian StyleFroiz-Míguez, Iván, Peio Lopez-Iturri, Paula Fraga-Lamas, Mikel Celaya-Echarri, Óscar Blanco-Novoa, Leyre Azpilicueta, Francisco Falcone, and Tiago M. Fernández-Caramés. 2020. "Design, Implementation, and Empirical Validation of an IoT Smart Irrigation System for Fog Computing Applications Based on LoRa and LoRaWAN Sensor Nodes" Sensors 20, no. 23: 6865. https://doi.org/10.3390/s20236865
APA StyleFroiz-Míguez, I., Lopez-Iturri, P., Fraga-Lamas, P., Celaya-Echarri, M., Blanco-Novoa, Ó., Azpilicueta, L., Falcone, F., & Fernández-Caramés, T. M. (2020). Design, Implementation, and Empirical Validation of an IoT Smart Irrigation System for Fog Computing Applications Based on LoRa and LoRaWAN Sensor Nodes. Sensors, 20(23), 6865. https://doi.org/10.3390/s20236865